Изобретение относится к области радиолокации и может быть использовано в системах вторичной радиолокации при определении координат цели в системе «запрос-ответ».
Изобретение относится также к авиации, к регулированию положения или размеров крыла и его частей, а именно - к изменению кривизны крыла с помощью предкрылков и закрылков, к системам управления и передачи для приведения в действие поверхностей управления, предкрылков и закрылков, и к устройствам цифровых вычислений и обработки данных специально предназначенных для специфических функций.
Из уровня техники известны различные устройства регулирования положения предкрылков и закрылков.
Примером является носок крыла самолета (патент RU 2022879, МПК: В64С 3/50, опубликовано 15.11.1994), включающий предкрылок, установленный на выдвижных рельсах с направляющими пазами, взаимодействующими с неподвижными узлами навески, а также створку с передним и задним узлами навески и устройством перемещения. Направляющий паз выдвижного рельса предкрылка выполнен с дополнительным участком, расположенным перед неподвижным узлом навески предкрылка, а устройство перемещения створки снабжено программным механизмом с кулачком, кинематически связанным с задним узлом навески створки, обеспечивающим взаимодействие переднего узла навески створки с дополнительным участком направляющего паза выдвижного рельса при выпуске предкрылка во взлетное положение. В указанном техническом решении для управления текущим положением предкрылка используется выдвижной рельс предкрылка с направляющим пазом, а также программный механизм с кулачком, обеспечивающим взаимодействие переднего узла навески створки с дополнительным участком направляющего паза выдвижного рельса.
Другим примером является крыло летательного аппарата с выдвижным предкрылком (патент RU 2397108, МПК: В64С 3/50, В64С 9/22, опубликовано 20.08.2010), содержащее каркас и по меньшей мере один предкрылок, установленный с возможностью выдвижения из исходного положения, в котором он прилегает к каркасу крыла, в рабочее положение, в котором он находится перед каркасом крыла на расстоянии от него, путем поворота относительно оси поворота предкрылка, проходящей вне конструкции крыла поперек направления набегающего потока. Предкрылок соединен с каркасом крыла посредством по меньшей мере двух складывающихся шарниров, разнесенных поперек направления набегающего потока.
Еще одним примером является устройство выдвижения предкрылка (патент RU 87993, МПК: В64С 3/50, опубликовано 27.10.2009), содержащее связанный с предкрылком выдвижной рельс с зубчатой рейкой, установленной в направляющих, закрепленных на каркасе крыла, взаимодействующее с зубчатой рейкой зубчатое колесо, также закрепленное на каркасе крыла. Предкрылок в средней части соединен с выдвижным рельсом, а в передней части предкрылка выполнена диафрагма, расположенная в поперечной плоскости, соединенная посредством болтового соединения с выдвижным рельсом, причем болтовое соединение выполнено с возможностью регулирования положения предкрылка относительно рельса.
В соответствии с приведенными выше техническими решениями, предкрылок (подвижная составная часть летательного аппарата) при своем перемещении совершает сложное поступательно-вращательное движение, определяемое кинематической схемой и конструкцией узла предкрылка и системой управления предкрылком, текущими значениями управляющих сигналов и динамическими характеристиками механической системы, состоящей из предкрылка и системы управления предкрылком.
В качестве прототипа выбрана система для определения координат цели в системе «запрос-ответ» (патент RU №2666360, МПК: G01S 13/75, опубликован 07.09.2018), размещенная на носителе (летательном аппарате (ЛА)), включающая антенну, направляемую на цель, систему «запрос-ответ», выполненную с возможностью сопоставления, как минимум, трех параметров, представляющих положение цели, положение носителя и направление прицеливания антенны для определения местоположения цели, а также цифровое вычислительное устройство (ЦВУ), выполненное с возможностью вычисления координат цели при любом положении носителя и антенны на носителе (на подвижной составной части носителя), датчик высоты, причем первый вход-выход системы «запрос-ответ» связан с антенной, направленной на цель, второй вход-выход системы «запрос-ответ» соединен с входом-выходом ЦВУ, первый вход ЦВУ соединен с выходом датчика высоты. Также система включает датчики углового положения антенны и носителя, при этом второй вход ЦВУ соединен с выходом датчиков углового положения. В соответствии с приведенным описанием, при размещении антенны системы для определения координат цели на подвижной составной части носителя (например, на подвижном предкрылке ЛА) в системе должны быть датчики углового положения антенны, в качестве которых могут использоваться датчики углового положения подвижной составной части носителя, на которой установлена антенна.
Общей технической проблемой для приведенных технических решений является то, что в процессе движения подвижной составной части носителя информация о ее текущем угловом положении отсутствует. Отсутствие информации о текущем угловом положении подвижной составной части делает невозможным размещение на ней составных частей систем, которым для нормального функционирования требуется информация о положении своих составных частей в пространстве, в том числе антенны системы определения координат цели.
Для решения указанной технической проблемы система определения координат цели может быть дополнена, например, совокупностью датчиков положения (датчиков угла и/или датчиков перемещения) подвижной составной части в соответствии с описанием прототипа, позволяющей по их показаниям определять текущее угловое положение подвижной составной части и установленной на ней антенны системы, в том числе с учетом текущего значения входных управляющих сигналов и динамических параметров механической системы «система управления подвижной составной частью - подвижная составная часть». Такое дополнение, решая техническую проблему определения текущего значения углового положения подвижной составной части и установленной на ней антенны, порождает для прототипа новые проблемы, связанные как с ухудшением надежности всей системы за счет вновь вводимых механических составных частей, так и с необходимостью конструктивного размещения вновь вводимых составных частей, которое в ряде случаев является технически невыполнимым и/или экономически нецелесообразным. Кроме этого, после конструктивного введения в состав носителя (ЛА) новых механических частей и/или датчиков, возникает необходимость в проведении дополнительных испытаний ЛА или его составных частей, обусловленных изменением конструкции.
Технический результат, на который направлено заявляемое изобретение, заключается в определении системой для определения координат цели значения текущего углового положения подвижной составной части носителя (ЛА) и установленной на ней антенны в реальном времени, без введения датчиков углового положения подвижной составной части носителя, с использованием текущих значений сигналов управления подвижной составной частью, а также в возможности применения системы на носителях, для которых получение информации об угловом положении их подвижных составных частей невозможно.
Неожиданный технический результат, обусловленный взаимосвязью носителя и его подвижной составной части с вновь вводимым блоком моделирования текущего положения подвижной составной части носителя, заключается в расширении функциональности системы определения координат цели (за счет появления возможности выдачи потребителям информации о текущем угловом положении подвижной составной части носителя) без ухудшения надежности системы и без дополнительных затрат на испытания носителя, проводимые вследствие изменения его конструкции.
Дополнительный неожиданный технический результат заключается в обеспечении возможности адаптации системы определения координат цели к различным типам носителей (ЛА) без изменения физической конструкции системы и ЛА. Кроме этого появляется возможность определения значения текущего углового положения подвижной составной части ЛА и установленной на ней антенны с учетом действительных (отличающихся от номинальных) значений технических параметров того экземпляра механической системы «система управления подвижной составной частью - подвижная составная часть» летательного аппарата, на котором установлена система для определения координат цели.
При анализе существующего уровня техники не выявлены аналоги заявляемого изобретения, содержащие размещенные на носителе антенну, направляемую на цель, систему «запрос-ответ», сопоставляющую положение цели, положение носителя и направление прицеливания антенны, а также цифровое вычислительное устройство, вычисляющее координаты цели при любом положении носителя и антенны на носителе, выполняющее в реальном времени программу, реализующую математическую модель динамической механической системы «система управления подвижной составной частью - подвижная составная часть», в том числе с учетом особенностей конкретного экземпляра динамической механической системы, и вычисляющее текущую угловую координату подвижной составной части ЛА и установленной на нем антенны взамен введения датчиков углового положения подвижной составной части ЛА.
При анализе существующего уровня техники также не выявлены аналоги заявляемого изобретения, содержащие подвижную составную часть, систему управления подвижной составной частью и устройство определения ее углового положения, позволяющее определять текущее угловое положение подвижной составной части ЛА с учетом текущего значения входных управляющих сигналов и динамических параметров механической системы «система управления подвижной составной частью - подвижная составная часть», без введения дополнительных механических составных частей и/или датчиков, позволяющих определять текущее угловое положение подвижной составной части ЛА.
Поиск технических решений в научно-технической литературе и смежных областях техники не выявил решения, имеющего признаки, совпадающие с отличительными признаками заявляемого изобретения.
Технические результаты достигаются тем, что система для определения координат цели, размещенная на носителе, включает в себя антенну, направляемую на цель, и размещенную на подвижной составной части носителя, систему «запрос-ответ», выполненную с возможностью сопоставления, как минимум, трех параметров, представляющих положение цели, положение носителя и направление прицеливания антенны для определения местоположения цели, а также цифровое вычислительное устройство, выполненное с возможностью вычисления координат цели при любом положении носителя и антенны на носителе, датчик высоты и датчики углового положения носителя. Причем первый вход-выход системы «запрос-ответ» связан с антенной, направляемой на цель, второй вход-выход системы «запрос-ответ» соединен с входом-выходом цифрового вычислительного устройства, первый вход цифрового вычислительного устройства соединен с выходом датчика высоты, второй вход цифрового вычислительного устройства соединен с выходом датчиков углового положения носителя. При этом система отличается от прототипа тем, что в цифровое вычислительное устройство системы дополнительно введен блок вычисления текущей угловой координаты, организованный алгоритмическим путем, содержащий последовательно соединенные модуль связи с входными сигналами, модуль расчета реакции и модуль выдачи углового положения. Причем вход модуля связи с входными сигналами подключен к третьему входу цифрового вычислительного устройства, соединенному, в свою очередь, с входом системы управления, выход которой связан с подвижной составной частью носителя. При этом модуль связи с входными сигналами выполнен с возможностью преобразования текущих значений входных управляющих сигналов, одновременно поступающих на вход системы управления и на третий вход цифрового вычислительного устройства. Модуль расчета реакции выполнен с возможностью вычисления в реальном масштабе времени текущего углового положения подвижной составной части носителя, принимаемого в качестве текущего углового положения антенны, направляемой на цель, на основании текущих значений входных управляющих сигналов и предыдущего (рассчитанного ранее) углового положения подвижной составной части носителя с использованием математической модели динамической механической системы «система управления подвижной составной частью - подвижная составная часть», вид, параметры и характеристики которой определены при проектировании и испытаниях носителя и представлены в виде номинальных значений, определяемых проектными параметрами и характеристиками механической системы, и отклонений от номинальных значений, определяемых при испытаниях экземпляра носителя, на котором установлена система для определения координат цели. А модуль выдачи углового положения выполнен с возможностью выдачи вычисленных значений текущего углового положения подвижной составной части в цифровое вычислительное устройство системы для определения координат цели и во внешние системы носителя при необходимости.
Сущность изобретения поясняется рисунками фиг. 1 - фиг. 11.
На фиг. 1 изображена функциональная схема системы для определения координат цели, где:
1 - носитель (ЛА), на котором размещена система для определения координат цели;
2 - антенна, направляемая на цель;
3 - подвижная составная часть носителя (ПСЧН), на которой размещена (и механически связана с ней) антенна 2;
4 - система управления (СУ) подвижной составной частью носителя;
5 - система «запрос-ответ»;
6 - цифровое вычислительное устройство (ЦВУ);
7 - блок вычисления текущей угловой координаты (БВТУК);
8 - модуль связи с входными сигналами (МСВС);
9 - модуль расчета реакции (МРР);
10 - модуль выдачи углового положения (МВУП);
11 - датчик высоты (ДВ);
12 - датчики углового положения носителя (ДУПН).
Также на фиг. 1 показаны:
Р1, …, PN - входные управляющие сигналы для СУ 4;
ϕ(Р1, …, PN) - фактическое текущее значение углового положения ПСЧН 3 (при эксплуатации носителя 1);
ϕ1(Р1, …, PN) - вычисленное текущее значение углового положения ПСЧН 3.
На фиг. 2 изображена схема динамической механической системы «система управления подвижной составной частью - подвижная составная часть». На схеме представлены информационные связи, входные команды управления для СУ 4 механической системой и функциональные блоки, обеспечивающие требуемые законы управления ПСЧН 3, в том числе:
«отказ КУН (канал управления носками)» - дискретный сигнал отказа механики системы;
«q=F(Vпр)» - промежуточный параметр, значение которого зависит от текущей приборной скорости Vпр;
М - число Маха;
αист - текущее значение угла атаки носителя;
α - промежуточный параметр, зависящий от αист, q, М и текущего времени;
Т - постоянная времени интегрирования;
0°, 30° - константы;
Обж.ПС - дискретный сигнал обжатия передней стойки шасси ЛА.
На фиг. 3 представлена математическая модель динамической механической системы в графическом виде пакета программ Matlab-Simulink (прошивка в ЦВУ 6 системы), в том числе:
From Workspace7 - входной массив текущих значений угла атаки;
From Workspace13 - входной массив текущих значений команды «Отказ КУН»;
From Workspace16 - входной массив текущих значений числа Маха;
From Workspace14 - входной массив текущих значений приборной скорости Vпр;
From Workspace21 - входной массив измеренных угловых отклонений ПСЧН 3.
Discrete Transfer Fcn1, Discrete Transfer Fcn2, Discrete Transfer Fcn3, Discrete Transfer Fcn4 - функциональные блоки, моделирующие коэффициенты передачи параметров с учетом динамических свойств механической системы;
1/((2+d1)*s+1), 1/((0.12+d2)*s+1), 1/((0.04+d3)*s+1), 1/((2+d4)*s+1) - передаточные характеристики функциональных блоков, моделирующих коэффициенты передачи параметров с учетом динамических свойств механической системы, где
s - комплексная переменная преобразования Лапласа (Г. Корн, Т. Корн, Справочник по математике Для научных работников и инженеров, М., изд. Наука, 1973, стр. 228),
d1, d2, d3, d4 - добавки, уточняющие номинальные значения параметров по результатам испытаний экземпляра носителя 1, на котором установлена система «запрос-ответ» 5;
Fнос(alpha) - функциональный блок, моделирующий функцию Fнос(α) (эмпирическая функция, определяемая конструкцией ЛА);
F(Vпр) - функциональный блок, моделирующий промежуточный параметр q, значение которого зависит от текущей приборной скорости Vпр.
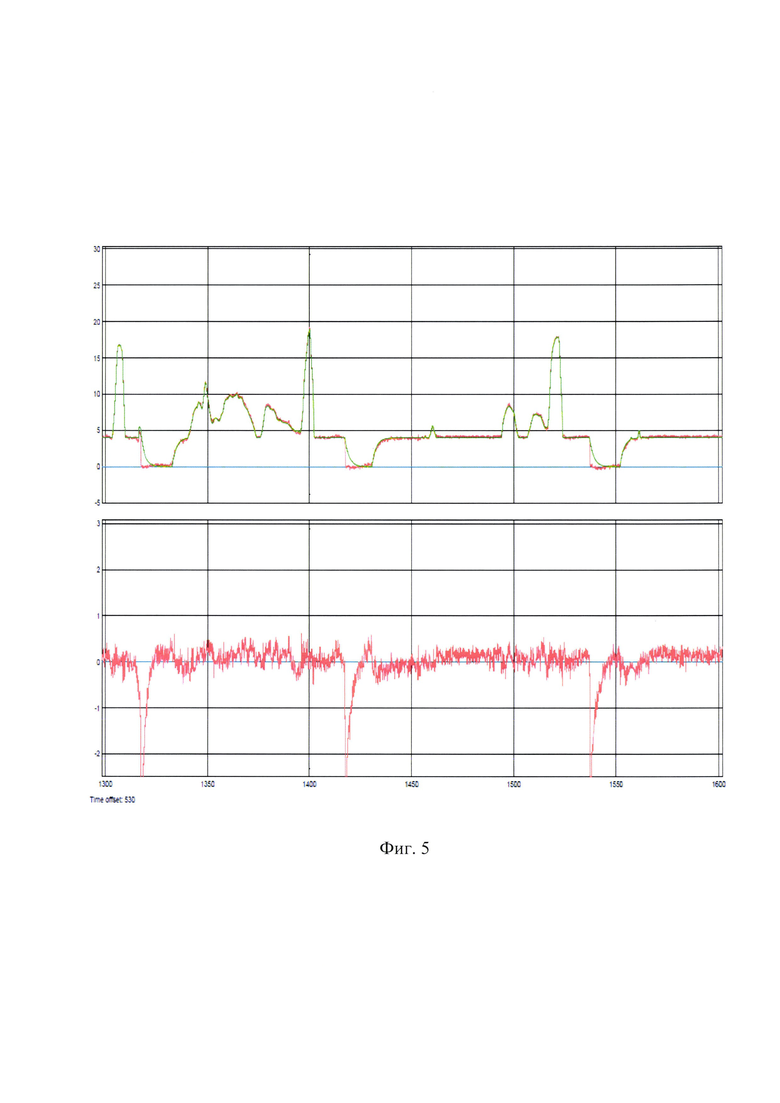
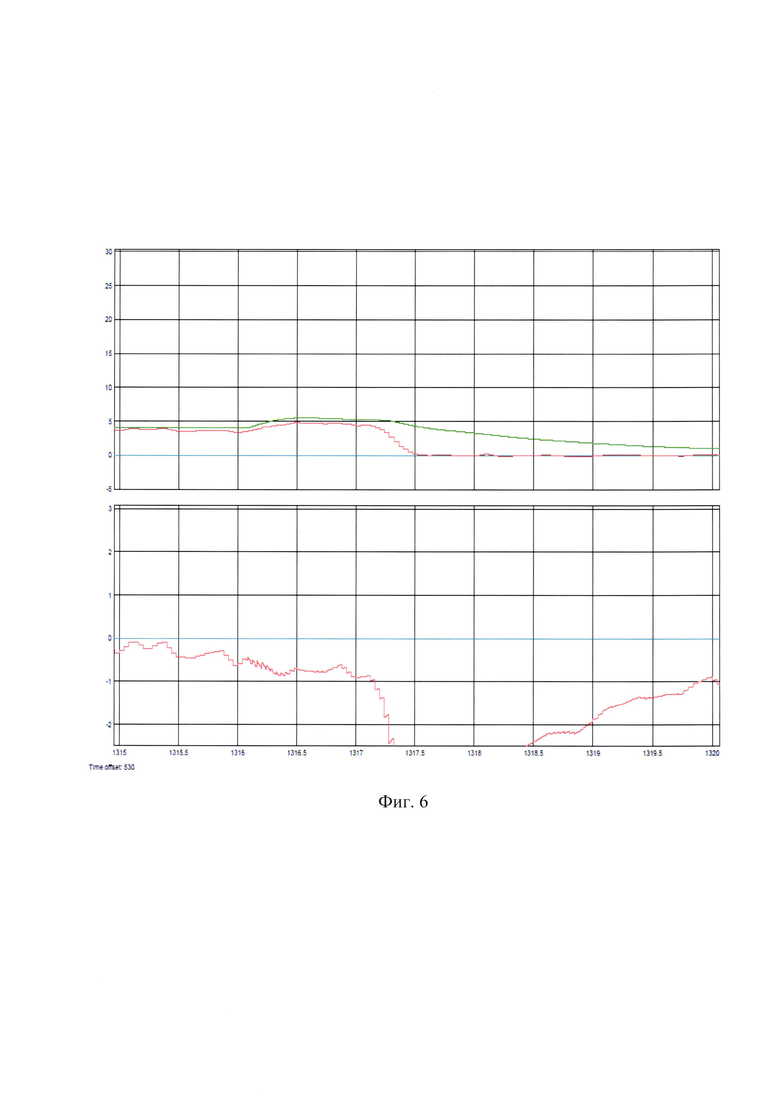
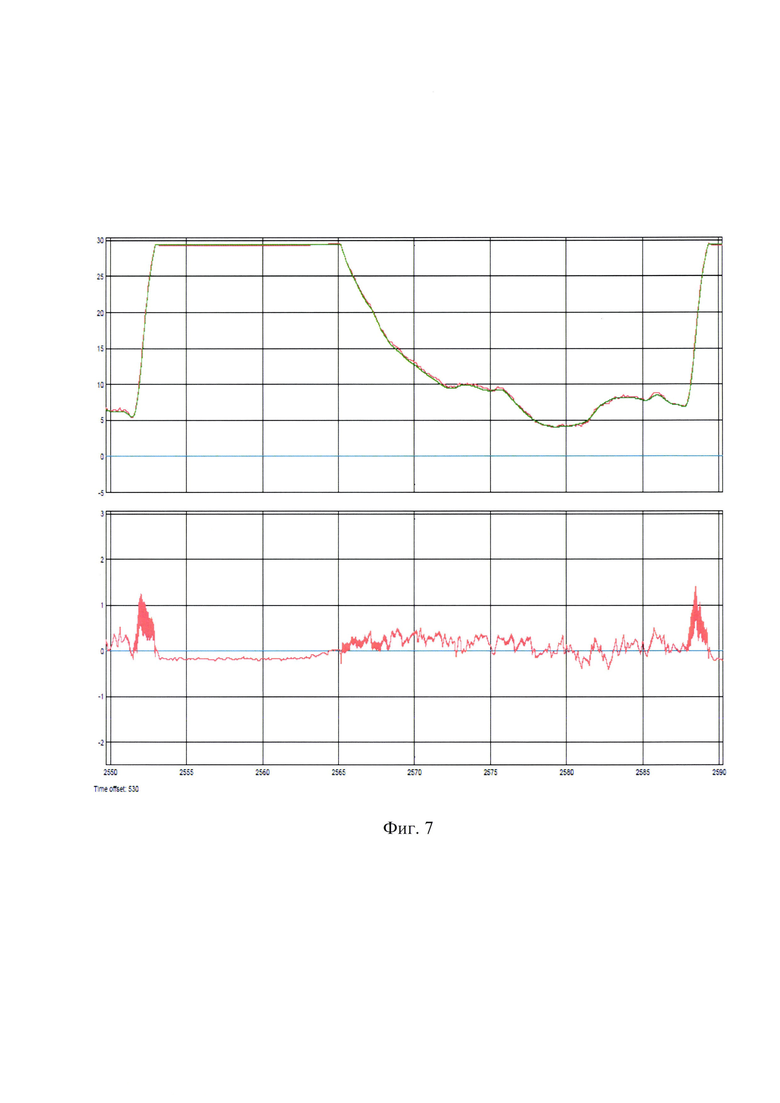
На фиг. 4 - фиг. 7 изображены результаты моделирования углового отклонения ПСЧН 3, на которой установлена антенна 2, на исходной математической модели в промежутках времени моделирования соответственно 0-4970 секунд (Фиг. 4), 1300-1600 секунд (Фиг. 5), 1315-1320 секунд (Фиг. 6) и 2550-2590 секунд (Фиг. 7). Представлены результаты моделирования поведения исходной математической модели при подаче на ее входы в реальном времени сигналов управления для СУ 4. Верхняя часть соответствующей фигуры представляет угловое положение ПСЧН 3, измеренное (красный цвет) при испытаниях экземпляра носителя 1, на котором установлена система «запрос-ответ» 5, и угловое положение ПСЧН 3, рассчитанное (зеленый цвет) исходной математической моделью, нижняя часть соответствующей фигуры представляет расхождение между угловым положением, измеренным при испытаниях экземпляра носителя 1, и угловым положением, рассчитанным исходной математической моделью.
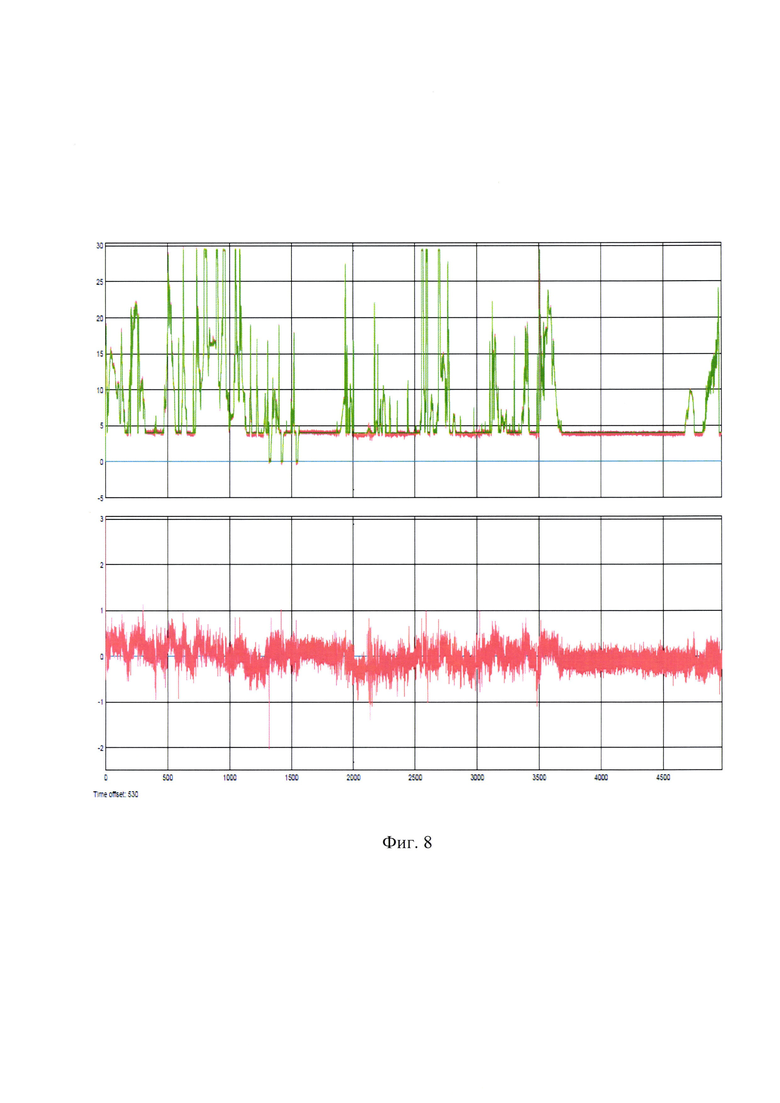
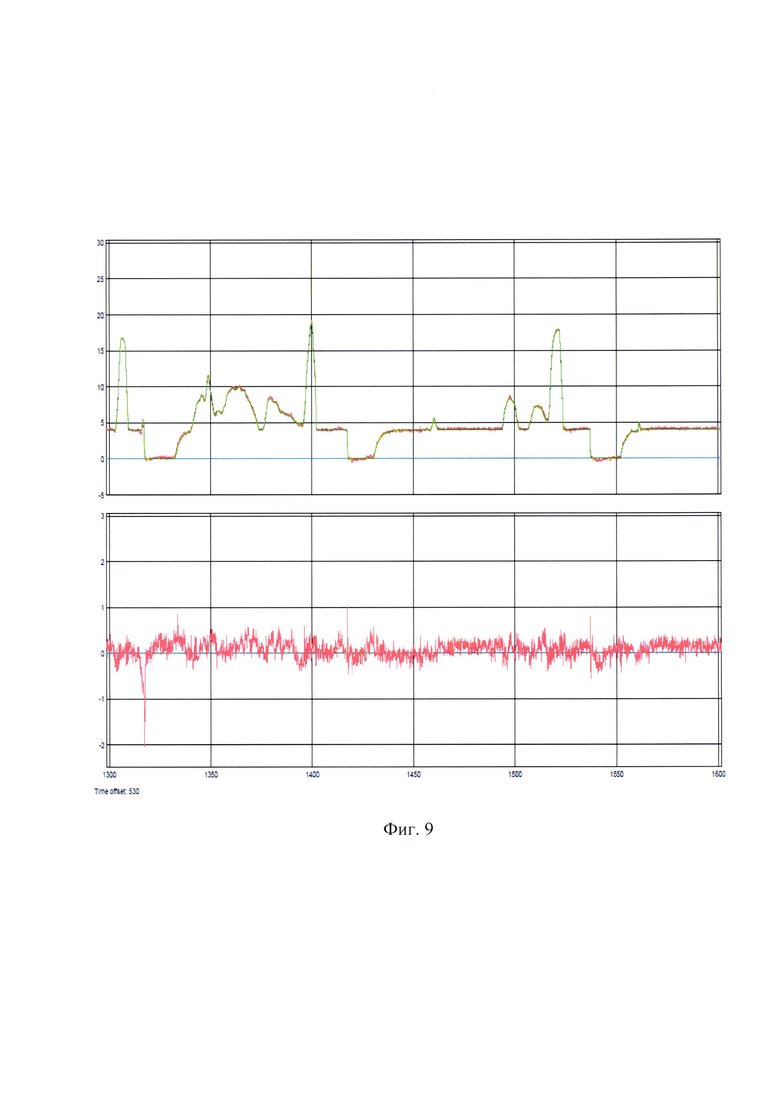
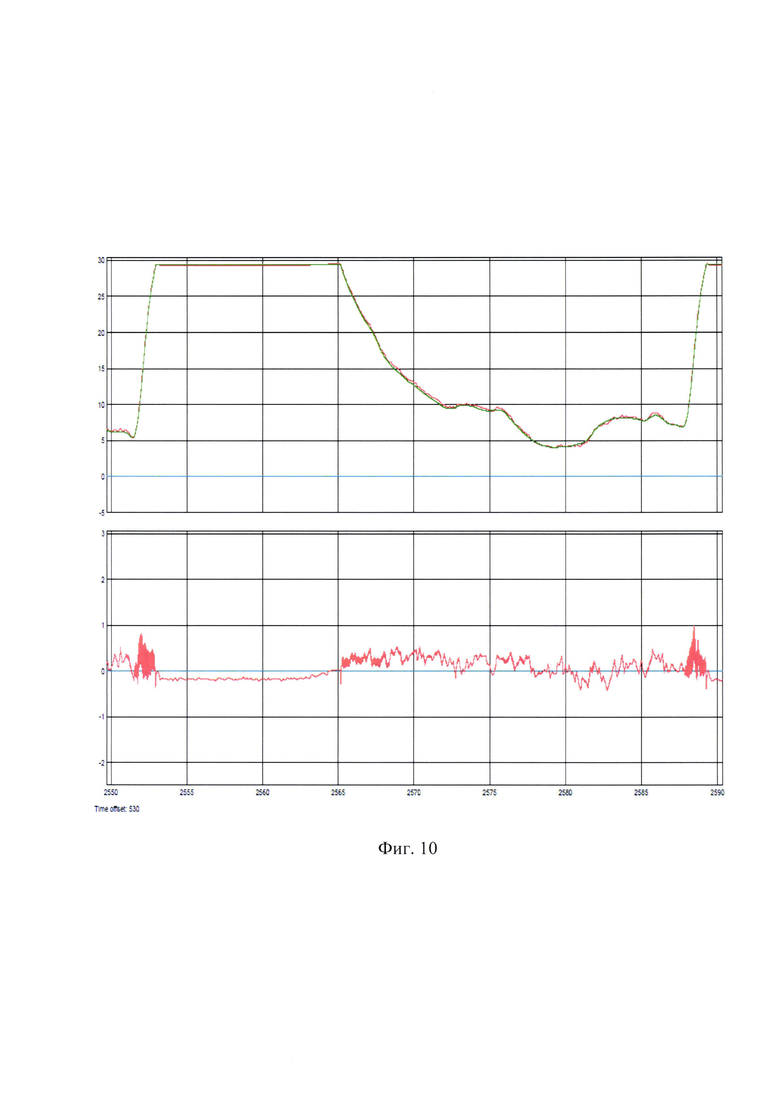
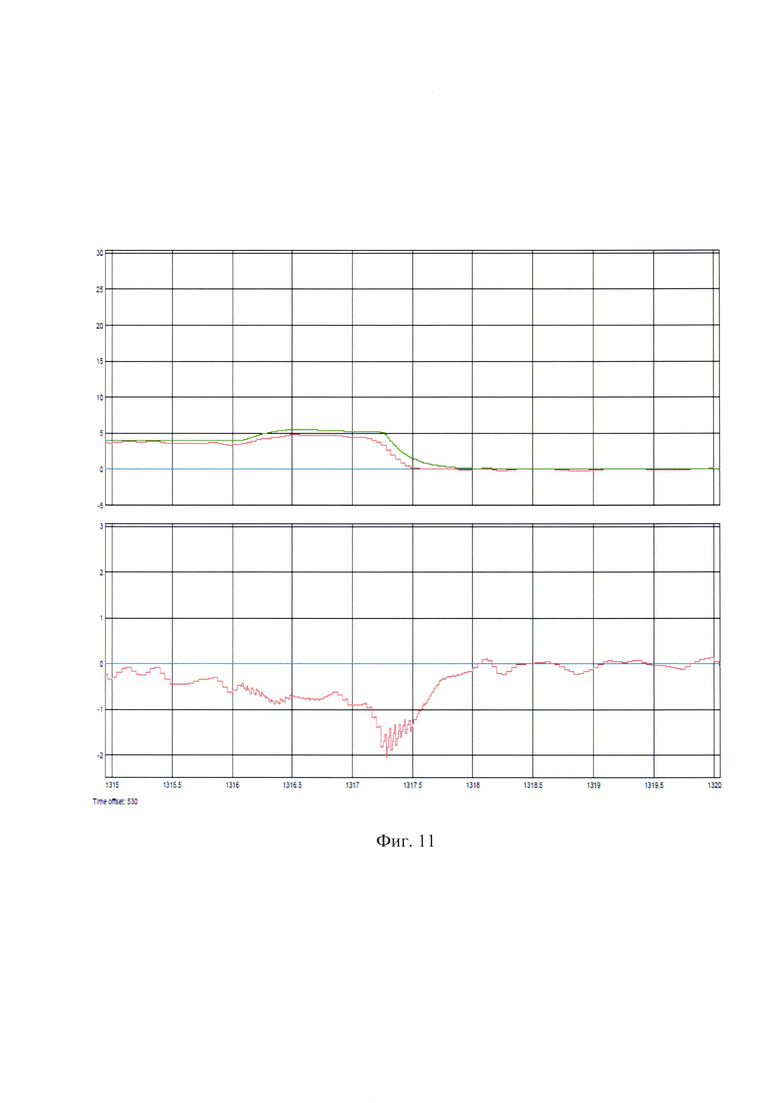
На фиг. 8 - фиг. 11 изображены результаты моделирования углового отклонения ПСЧН 3, на которой установлена антенна 2, на откорректированной математической модели в промежутках времени моделирования соответственно 0-4970 секунд (Фиг. 8), 1300-1600 секунд (Фиг. 9), 1315-1320 секунд (Фиг. 10) и 2550-2590 секунд (Фиг. 11). Математическая модель откорректирована по результатам испытаний экземпляра носителя 1, на котором установлена система «запрос-ответ» 5. Представлены результаты моделирования поведения откорректированной математической модели при подаче на ее входы в реальном времени сигналов управления для СУ 4. Верхняя часть соответствующей фигуры представляет угловое положение ПСЧН 3, измеренное (красный цвет) при испытаниях экземпляра носителя 1, на котором установлена система «запрос-ответ» 5, и угловое положение ПСЧН 3, рассчитанное (зеленый цвет) откорректированной математической моделью, нижняя часть соответствующей фигуры представляет расхождение между угловым положением, измеренным при испытаниях экземпляра носителя 1, и угловым положением, рассчитанным откорректированной математической моделью.
Антенна 2 системы для определения координат цели (Фиг. 1) установлена на ПСЧН 3 и связана с первым входом-выходом системы «запрос-ответ» 5, второй вход-выход которой соединен с входом-выходом ЦВУ 6, выполненного с возможностью вычисления координат цели при любом положении носителя 1 и антенны 2 на носителе 1. При этом система «запрос-ответ» 5 выполнена с возможностью сопоставления, как минимум, трех параметров, представляющих положение цели, положение носителя 1 и направление прицеливания антенны 2 для определения местоположения цели. К первому входу ЦВУ 6 подключен ДВ 11, выдающий текущее значение высоты полета ЛА, второй вход ЦВУ 6 соединен с ДУПН 12, выдающим текущее значение углового положения ЛА в пространстве, а третий вход ЦВУ 6 соединен с входом СУ 4 и предназначен для приема входных управляющих сигналов (Р1, …, PN). Выход СУ 4 связан с ПСЧН 3, которая имеет механизм выдвижения и/или поворота - исполнительный механизм, осуществляющий перемещение и/или поворот ПСЧН 3 (например, предкрылка крыла ЛА), на которой размещена антенна 2, в соответствии с командами СУ 4. Системе для определения координат цели для своей работы необходима информация об угловом положении антенны 2, в качестве которой можно использовать информацию о текущем угловом положении ПСЧН 3. С целью определения текущего углового положения ПСЧН 3 и, соответственно, углового положения установленной на ней антенны 2, в систему для определения координат цели дополнительно без изменения механической конструкции носителя (ЛА) 1 введен БВТУК 7.
БВТУК 7 организован алгоритмическим путем и функционирует в виде совокупности исполняемых программных модулей (или одного исполняемого программного модуля) в ЦВУ 6 системы определения координат цели (или в другом цифровом вычислительном устройстве, входящем в состав носителя 1 или в состав одной из его составных частей, или в дополнительно вводимом цифровом вычислительном устройстве, предназначенном для функционирования исполняемой программы блока вычисления текущей угловой координаты). БВТУК 7 выполняет функцию вычисления в реальном времени значения текущего углового положения ПСЧН 3 на основании текущих значений входных управляющих сигналов для СУ 4. В системе, представленной на фиг. 1, БВТУК 7 состоит из трех модулей - МСВС 8, МРР 9 и МВУП 10.
МСВС 8, МРР 9 и МВУП 10, образующие БВТУК 7, соединены последовательно и являются программными и/или программно-аппаратными модулями. При этом вход МСВС 8 соединен с третьим входом ЦВУ 6, а выход МВУП 10 является выходом вычисленных текущих значений углового положения ПСЧН 3 (ϕ1(Р1, …, PN)), используемых в дальнейшем ЦВУ 6, и принимаемых в качестве текущих значений углового положения антенны 2 при определении координат цели.
МСВС 8 - интерфейсный аппаратно-программный или программный модуль, осуществляющий прием текущих значений входных управляющих сигналов (P1, …, PN) для СУ 4 и преобразование принятых значений в форму, пригодную для использования значений МРР 9.
МРР 9 - программный модуль, рассчитывающий в реальном масштабе времени текущее угловое положение ПСЧН 3 на основании текущих значений входных управляющих сигналов и предыдущего (рассчитанного ранее) углового положения ПСЧН 3 с использованием математической модели подвижной составной части, заданной в виде алгоритма, параметры которой определены на основании проектирования носителя (ЛА) 1 и испытаний экземпляра носителя (ЛА) 1, на котором установлена система для определения координат цели.
МВУП 10 - программный модуль, выдающий в реальном масштабе времени значение текущего углового положения ПСЧН 3, вычисленное с помощью МРР 9.
Определение текущего значения углового положения ПСЧН 3 в системе для определения координат цели выполняется следующим образом.
Через третий вход ЦВУ 6 на вход МСВС 8, входящего в состав БВТУК 7, в реальном времени поступает информация о текущих значениях входных управляющих сигналов (Р1, …, PN), поступающих также на вход СУ 4. При этом МСВС 8 преобразует данные сигналы к необходимому виду и передает их значения на вход МРР 9.
МРР 9 вычисляет текущее угловое положение ПСЧН 3 в реальном масштабе времени с использованием математической модели динамической механической системы «система управления подвижной составной частью - подвижная составная часть» (Фиг. 3), созданной на основе проектных параметров и характеристик механической системы в составе носителя (ЛА) 1, и передает результат вычисления, характеризующий текущее угловое положение ПСЧН 3, в МВУП 10. Вид, параметры и характеристики математической модели динамической механической системы определяются при проектировании ЛА с использованием статических технических параметров системы «система управления подвижной составной частью - подвижная составная часть», а также при испытаниях ЛА на основании зависимостей значений текущих угловых положений ПСЧН 3 от текущих значений входных управляющих сигналов для СУ 4. При этом параметры и характеристики математической модели представлены в виде номинальных значений, определяемых проектными параметрами и характеристиками механической системы, и отклонений от номинальных значений в виде изменяемых добавок, определяемых при испытаниях конкретного экземпляра механической системы в составе носителя (ЛА) 1.
Вычисленное текущее значение углового положения ПСЧН 3 с выхода МРР 9 поступает на вход МВУП 10, который хранит его в течение времени до следующего вычисления углового положения, преобразует указанное значение углового положения к виду, требуемому для использования системой определения координат цели и выдает текущее значение углового положения ПСЧН 3 для последующего использования в ЦВУ 6, а также в системы носителя (ЛА) 1 при необходимости.
Таким образом, вычисленные БВТУК 7 значения углового положения ПСЧН 3 используются системой для определения координат цели в качестве угловой координаты антенны 2, и могут также выдаваться для использования во внешние системы носителя (ЛА) 1.
Для осуществления изобретения на стадии проектирования носителя (ЛА) 1 аналитическим путем известными методами определяются динамические параметры механической (электромеханической, гидромеханической, пневмомеханической, смешанной или другой) системы «система управления подвижной составной частью - подвижная составная часть» при номинальных значениях статических технических параметров упомянутой механической системы. Динамические параметры данной системы определяются в виде уравнений (математической модели), связывающих в реальном времени значение текущего углового положения подвижной составной части с текущими значениями входных управляющих сигналов системы управления подвижной составной частью, предыдущим угловым положением и параметрами изменения (скорость, ускорение) углового положения подвижной составной части.
Например, для носителя (ЛА) 1, на котором реализовано заявляемое изобретение, схема динамической модели механической системы, составленная по результатам проектирования носителя, имеет вид, показанный на фиг. 2, а математическая модель, соответствующая динамической модели механической системы - на фиг. 3.
При определении математической модели статические технические параметры системы описываются и используются в уравнениях в виде номинальных значений параметров и их фактических отклонений от номинальных значений. Фактические отклонения значений параметров от номинальных принимаются нулевыми перед испытаниями конкретного экземпляра системы «система управления подвижной составной частью - подвижная составная часть», установленной на носителе 1, и могут отличаться от нулевых значений по результатам проведения испытаний и обработки их результатов.
На основании математической модели, с учетом действия логики дискретных управляющих сигналов СУ 4, разрабатывается исполняемая программа (в виде БВТУК 7) для ЦВУ 6, использующая, в том числе, значения фактических отклонений статических технических параметров системы от номинальных значений.
Исполняемая в ЦВУ 6 программа (исполняемые программные модули БВТУК 7) получает в реальном времени значения входных управляющих сигналов (МСВС 8 в составе БВТУК 7), поступающих в СУ 4, выполняет в реальном времени вычисление текущей угловой координаты ПСЧН 3 (выполняет МРР 9 в составе БВТУК 7) с использованием этих значений входных управляющих сигналов, предыдущего значения углового положения ПСЧН 3 и параметров изменения углового положения ПСЧН 3, и передает значение вычисленной текущей угловой координаты ПСЧН 3 на выход (посредством МВУП 10 в составе БВТУК 7) для использования указанного значения.
При проведении испытаний экземпляра носителя (ЛА) 1, на котором установлена система для определения координат цели, производится проверка правильности вычисления текущей угловой координаты ПСЧН 3 исполняемой программой (БВТУК 7), например, путем изменения входных управляющих сигналов СУ 4 в заданных пределах, одновременной их подачи в СУ 4 и на третий вход ЦВУ 6 исполняемой программе, и определения фактического и вычисленного исполняемой программой значений текущей угловой координаты ПСЧН 3. Соответствующие результаты испытаний для носителя 1, на котором установлена система определения координат и реализована исходная математическая модель с номинальными значениями параметров и нулевыми значениям добавок к параметрам, представлены на фиг. 3 - фиг. 7. На фигурах видно, что значения фактического и вычисленного исходной математической моделью углового отклонения ПСЧН 3 значительно отличаются на интервалах времени от 1317 до 1321 секунды, от 1417 до 1421 секунды и от 1537 до 1541 секунды, а также от 2550 до 2555 секунды и от 2585 до 2590 секунды.
По результатам сравнения массивов фактического и вычисленного значений текущей угловой координаты ПСЧН 3 нулевые значения фактических отклонений статических параметров при необходимости могут быть изменены по критерию наименьшей разницы между фактическим и вычисленным значениями текущей угловой координаты ПСЧН 3, зависящей от конкретного экземпляра механической системы «система управления подвижной составной частью - подвижная составная часть», и использованы при эксплуатации экземпляра носителя, на котором установлена система для определения координат цели. Например, для носителя 1, на котором установлена система определения координат цели, в результате анализа данных установлено, что отличие фактического (ϕ(Р1, …, PN)) и вычисленного (ϕ1(Р1, …, PN)) значений связано с недостаточной скоростью изменения и запаздыванием во времени выходного параметра исходной математической модели по сравнению с фактическими значениями. Для приведения математической модели в соответствие с фактическими значениями потребовалось установить значение добавки d1 равной 0,5, d2 оставить нулевой, d3 установить равной 0,02, а d4 установить равной минус 1,8.
Соответствующие результаты прогона в пакете программ Matlab-Simulink математической модели с откорректированными значениями добавок к номинальным значениям параметров представлены на фиг. 8 - фиг. 11. По фигурам видно, что разница между измеренными и вычисленными значениями углового положения ПСЧН 3 не превышает одного градуса на всем протяжении моделирования, кроме одного периода длительностью менее 0,5 секунды. Достигнутая точность воспроизведения реального углового отклонения ПСЧН 3 полностью удовлетворяет предъявляемым техническим требованиям.
Изобретение относится к области радиолокации, а также авиации, в частности к изменению кривизны крыла с помощью предкрылков и закрылков, к системам управления и передачи для приведения в действие поверхностей управления, предкрылков и закрылков, и к устройствам цифровых вычислений и обработки данных, специально предназначенных для специфических функций, и может быть использовано в системах вторичной радиолокации при определении координат цели в системе «запрос-ответ». Технический результат заключается в определении системой для определения координат цели значения текущего углового положения подвижной составной части носителя (летательного аппарата) и установленной на ней антенны в реальном времени, с использованием текущих значений сигналов управления подвижной составной частью, а также в возможности применения системы на носителях, для которых получение информации об угловом положении их подвижных составных частей невозможно. Система для определения координат цели, размещенная на носителе, включает в себя антенну, направляемую на цель, размещенную на подвижной составной части носителя систему «запрос-ответ», выполненную с возможностью сопоставления параметров положения цели, положения носителя и направления прицеливания антенны для определения местоположения цели, цифровое вычислительное устройство для вычисления координат цели при любом положении носителя и антенны на носителе, датчик высоты и датчики углового положения носителя. В цифровое вычислительное устройство системы дополнительно введен блок вычисления текущей угловой координаты, содержащий последовательно соединенные модуль связи с входными сигналами, модуль расчета реакции и модуль выдачи углового положения. Модуль расчета реакции выполнен с возможностью вычисления текущего углового положения подвижной составной части носителя, принимаемого в качестве текущего углового положения антенны. Модуль выдачи углового положения выполнен с возможностью выдачи вычисленных значений текущего углового положения подвижной составной части в цифровое вычислительное устройство системы для определения координат цели и во внешние системы носителя при необходимости. 11 ил.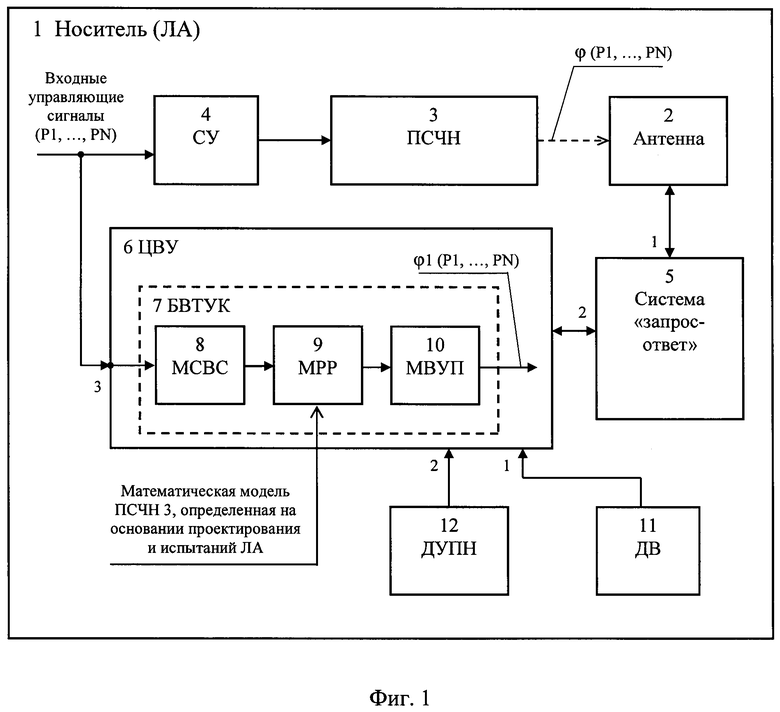
Система для определения координат цели, размещенная на носителе, включающая антенну, направляемую на цель и размещенную на подвижной составной части носителя, систему «запрос-ответ», выполненную с возможностью сопоставления, как минимум, трех параметров, представляющих положение цели, положение носителя и направление прицеливания антенны для определения местоположения цели, а также цифровое вычислительное устройство, выполненное с возможностью вычисления координат цели при любом положении носителя и антенны на носителе, датчик высоты и датчики углового положения носителя, причем первый вход-выход системы «запрос-ответ» связан с антенной, направляемой на цель, второй вход-выход системы «запрос-ответ» соединен с входом-выходом цифрового вычислительного устройства, первый вход цифрового вычислительного устройства соединен с выходом датчика высоты, второй вход цифрового вычислительного устройства соединен с выходом датчиков углового положения носителя, отличающаяся тем, что в цифровое вычислительное устройство системы дополнительно введен блок вычисления текущей угловой координаты, организованный алгоритмическим путем, содержащий последовательно соединенные модуль связи с входными сигналами, модуль расчета реакции и модуль выдачи углового положения, причем вход модуля связи с входными сигналами подключен к третьему входу цифрового вычислительного устройства, соединенному, в свою очередь, с входом системы управления, выход которой связан с подвижной составной частью носителя, при этом модуль связи с входными сигналами выполнен с возможностью преобразования текущих значений входных управляющих сигналов, одновременно поступающих на вход системы управления и на третий вход цифрового вычислительного устройства, модуль расчета реакции выполнен с возможностью вычисления в реальном масштабе времени текущего углового положения подвижной составной части носителя, принимаемого в качестве текущего углового положения антенны, направляемой на цель, на основании текущих значений входных управляющих сигналов и предыдущего (рассчитанного ранее) углового положения подвижной составной части носителя с использованием математической модели динамической механической системы «система управления подвижной составной частью - подвижная составная часть», вид, параметры и характеристики которой определены при проектировании и испытаниях носителя и представлены в виде номинальных значений, определяемых проектными параметрами и характеристиками механической системы, и отклонений от номинальных значений, определяемых при испытаниях экземпляра носителя, на котором установлена система для определения координат цели, а модуль выдачи углового положения выполнен с возможностью выдачи вычисленных значений текущего углового положения подвижной составной части в цифровое вычислительное устройство системы для определения координат цели и во внешние системы носителя при необходимости.
| Способ и система для определения координат цели в системе "запрос-ответ" | 2016 |
|
RU2666360C1 |
| Способ и система определения координат цели в системе запрос-ответ | 2016 |
|
RU2631117C1 |
| Радиолокационная система метрового и низкочастотной части дециметрового диапазонов волн с системой опознавания | 2016 |
|
RU2650198C1 |
| Моноимпульсная вторичная радиолокационная система с режимом S | 2013 |
|
RU2606386C2 |
| 0 |
|
SU158344A1 | |
| FR 3023009 B1, 14.10.2016 | |||
| ГЕНЕРИРУЮЩАЯ АЭРОЗОЛЬ СИСТЕМА С УЛУЧШЕННЫМ ЭЛЕКТРИЧЕСКИМ РАЗЪЕМОМ | 2021 |
|
RU2838196C1 |
| CN 106872952 A, 20.06.2017 | |||
| CN 105445733 A, 30.03.2016 | |||
| WO 2017220461 A1, 28.12.2017. | |||

