Изобретение относится к космической технике, преимущественно к космическим тросовым системам. Изобретение может быть использовано для защиты космических аппаратов (КА) от столкновения на орбите с другими телами путем выполнения маневра уклонения с возвращением на исходную орбиту без использования реактивной двигательной установки и затрат рабочего тела на выполнение маневров.
Возрастающее антропогенное загрязнение околоземного космического пространства космическим мусором (КМ) существенно ухудшает условия безопасного функционирования КА.
Основной отличительной характеристикой антропогенных объектов от метеорных частиц является то, что они находятся на околоземных орбитах и время их баллистического существования может значительно превышать время активного функционирования КА. Следствием этого является возможность накопления КМ в околоземном космическом пространстве, что и подтверждается практикой. В данный момент в космосе находится около 16000 объектов КМ, регистрируемых современными средствами слежения.
Известен факт столкновения двух КА в космосе 10 февраля 2009 года на высоте около 790 километров над северной частью Сибири. Спутник связи «Космос-2251», запущенный в 1993 году и выведенный из эксплуатации, столкнулся с коммерческим спутником американской компании спутниковой связи «Iridium 33».
Влияние космического мусора как фактора космического пространства, определяющего работоспособность КА и его систем, будет возрастать. Это связано прежде всего с ожидаемым дальнейшим увеличением количества фрагментов КМ в приземном космосе.
По оценкам специалистов в области антропогенного загрязнения космоса условия, в которых функционируют большинство российских КА на орбитах с наклонениями 50-60 градусов, являются «неблагоприятными» с точки зрения возможного воздействия на них КМ. Таким образом, можно сделать вывод, что задача защиты космических аппаратов от воздействия фрагментов КМ актуальна ввиду следующих причин:
1. Современные статистические данные и результаты научных исследований показывают высокую динамику процесса загрязнения приземного космоса. Исследования состояния возвращенных на Землю объектов показывают, что уже в настоящее время существует реальная опасность повреждения элементов КА высокоскоростными потоками частиц КМ.
2. Условия, в которых функционируют большинство российских КА, являются неблагоприятными с точки зрения воздействия частиц КМ, как по возможным углам встречи (высокие относительные скорости), так и по прохождению наиболее загрязненных областей космического пространства.
3. Технологическое совершенствование орбитальных средств позволяет увеличить сроки их активного функционирования, но, как следствие, при этом возрастает вероятность их столкновения с частицами КМ. Очевидно, что это противоречие порождает проблему, актуальность которой нарастает быстрыми темпами.
Защитой КА от воздействия техногенных факторов космической среды называется совокупность конструктивно-технических и организационно-управляющих решений, обеспечивающих гарантированное целевое функционирование КА в условиях техногенного воздействия космической среды.
Способы защиты КА от техногенных космических объектов условно делятся на два класса:
- активные способы защиты;
- пассивные способы защиты.
Активными способами защиты являются [5-19]:
1) маневр выведения КА из опасной зоны на другую орбиту, маневр уклонения КА от столкновения с опасным фрагментом КМ и последующим возвращением на исходную орбиту, изменение орбиты других тел для исключения столкновения;
2) управляемое изменение профиля КА с целью уменьшения его сечения, варьирование структурной компоновкой модулей аппарата;
3) формирование защитных встречных потоков выбранных сред в различном фазовом состоянии с целью дефрагментации опасных объектов.
Пассивные способы защиты КА [10-14] предполагают применение различных бортовых вспомогательных средств защиты, позволяющих снизить эффект столкновения с другими телами до безопасного уровня:
1) установка стационарных и перемещаемых экранов из твердого тела;
2) покрытие КА затягивающимся после удара частиц материалом.
Пассивные способы защиты наиболее эффективны при воздействии мелкодисперсной техногенной среды.
Предлагаемый способ выполнения маневра уклонения космического аппарата от столкновения на орбите с другими телами относится к активным способам защиты.
Активные способы защиты КА целесообразны к применению, если полная механическая энергия техногенных объектов превышает возможности ее рассеивания средствами пассивной защиты.
Активные методы защиты предполагают изменение орбиты КА либо орбиты техногенного объекта с целью исключения опасного сближения, а также проведение маневра уклонения.
Известен активный способ защиты космических аппаратов, включающий формирование защитного экрана, его отделение от защищаемого аппарата и направление в сторону потенциально опасных объектов [16].
Известен способ увеличения сроков активного существования космических аппаратов, заключающийся в том, что бортовым радиолокационным комплексом сканируют пространство и определяют опасные объекты по расчетной точке встречи и времени до соударения спутника и внешнего тела, после чего принимается решение на увод спутника на безопасную орбиту или, в случае дефицита времени на перезапуск двигателей и перемещение спутника на безопасную орбиту подают соплом в точку встречи спутника и внешнего тела поток с частицами [17].
Известны способы увеличения сроков активного существования космических аппаратов, связанные с повторным запуском двигателей и перемещением спутника на безопасную орбиту [18. 19].
Недостаток этих способов связан с очевидным ограничением ресурсов по повторному запуску двигателей и необходимостью обеспечения запаса рабочего тела. Рассмотренные выше способы имеют очевидные ограничения по возможности применения, низкую гарантированность достижения результата и ограниченный ресурс применения. Они потребуют выполнения значительного усложнения конструкции аппарата.
Известно, что маневр уклонения КА от столкновения с опасными фрагментами КМ путем кратковременного увода КА с рабочей орбиты и последующим возвращением на нее может быть выполнен с помощью космической тросовой системы (КТС). КТС - это соединенные длинным тонким тросом-нитью два массивных тела, совершающие совместный полет. Маневр уклонения с помощью КТС предполагает двухмодульную конструкцию КА. Маневр уклонения КА выполняется на основе принципа обмена механической орбитальной энергией между связанными объектами [1, 5]. Принцип обмена механической энергией в такой системе реализуется через реакцию натяжения троса, которая может выступать в качестве управляющего воздействия. При выполнении маневра уклонения модули КА совершают несвободное относительное движение внутри сферы, радиус которой не превышает длину соединительного троса-нити, а центр сферы движется по исходной целевой орбите центра масс всей системы. В случае равенства масс модулей двухсекционного КА (m1=m2) радиус сферы, внутри которой происходит маневрирование, равен половине длины соединительного троса и модули равноудалены от центра масс связки. В этом случае траектории относительного движения модулей лежат в плоскости исходной орбиты и симметричны относительно точки центра масс. Применение такого способа защиты от столкновения путем выполнения маневра уклонения с переводом КА на другую орбиту и последующим возвращением его на исходную орбиту позволит значительно уменьшить энергетические затраты на маневр по сравнению с ракетодинамическим маневром.
Маневр уклонения с помощью КТС выполняется путем расстыковки модулей КА, их расталкивания, пассивного или управляемого разведения связанных тросом модулей на разные орбиты, возвращения системы в исходное монолитное состояние на исходной орбите путем сближения и стыковки за счет управляемой выборки троса [3]. Выведение модулей КА из опасной зоны производится сообщением им начальных импульсов скорости при их расталкивании, например с помощью пружинных толкателей [2]. Такой маневр КТС выполняется без затрат рабочего тела и основан на энергомассовом обмене связанных тросом двух модулей KA [1, 5, 7].
В работе [3] описаны четыре схемы маневра уклонения КА от столкновения с опасными фрагментами, отличающиеся пространственной ориентацией начальных импульсов расталкивания модулей КА, а также программами управления процессов подачи и выборки троса. Рассмотрены схемы маневра уклонения с направлениями расталкивания модулей КА по осям орбитальной системы координат (радиальное, трансверсальное, бинормальное), а также схема маневра прямолинейного развертывания КТС в плоскости исходной орбиты при расталкивании модулей КА под углом к местному горизонту 60°.
Описанный способ маневра уклонения КА от столкновения с опасными фрагментами выгодно отличается от ракетодинамических маневров уклонения следующими достоинствами:
- отсутствие реактивных двигательных установок и запасов рабочего тела к ним;
- малые значения импульсов расталкивания модулей КА (0,1÷2 м/с), которые могут быть реализованы несложными механическими устройствами;
- возможность многократного выполнения маневра уклонения.
Недостатками этого способа маневра уклонения являются:
- двухмодульная конструкция защищаемого КА, предполагающая автономное функционирование системы управления маневром уклонения на одном из модулей КА после их разделения;
- вероятность разрыва троса фрагментом КМ в опасной зоне после выведения из нее модулей КА;
- достаточно сложные программы управления процессом подачи-выборки троса при выполнении маневра уклонения.
Рассмотренный в работе [3] способ выполнения маневра уклонения от столкновения с фрагментами КМ по своим характерным признакам наиболее близок к способу, предлагаемому авторами, и поэтому выбирается в качестве прототипа.
Приведем подробное описание прототипа на примере схемы трансверсального разделения модулей КА.
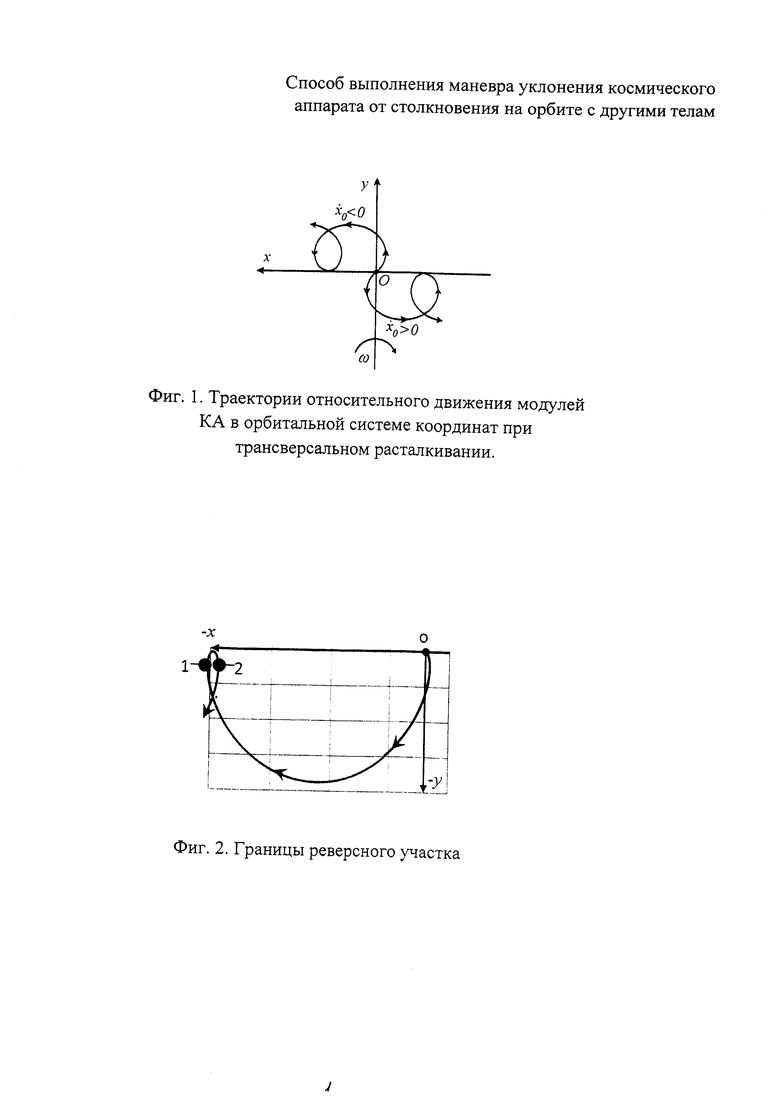
Расталкивание двух модулей КА в транверсальном направлении осуществляется вдоль оси Ох орбитальной системы координат, связанной с центром масс КА (фиг. 1). Модуль, получивший начальный импульс в направлении движения KA  , сначала обгоняет начало орбитальной системы координат, одновременно поднимаясь над ним. Затем он начинает отставать от этой точки, оставаясь выше начала координат. Через период обращения модуль окажется позади начала орбитальной системы координат на оси Ох. В дальнейшем характер движения будет повторяться и модуль будет удаляться от начала координат. Движение второго модуля, получившего по закону импульса противоположное направление, является симметричным относительно начала координат.
, сначала обгоняет начало орбитальной системы координат, одновременно поднимаясь над ним. Затем он начинает отставать от этой точки, оставаясь выше начала координат. Через период обращения модуль окажется позади начала орбитальной системы координат на оси Ох. В дальнейшем характер движения будет повторяться и модуль будет удаляться от начала координат. Движение второго модуля, получившего по закону импульса противоположное направление, является симметричным относительно начала координат.
Таким образом, расталкивание и разведение модулей КА путем сообщения им транверсальных импульсов в противоположных направлениях приведет к постоянному их удалению друг от друга с включением на каждом периоде обращения центра масс системы небольшого участка реверсного движения (на фиг. 2 границы реверсного участка обозначены цифрами «1» и «2»). Поэтому для принудительного сближения модулей и их последующей стыковки на первоначальной орбите КА предлагается использовать трос. На участке удаления модулей друг от друга происходит свободное разматывание троса. Затем осуществляется натяжение троса по определенному закону и происходит свертывание КТС с мягкой стыковкой модулей на первоначальной орбите КА. Переход от этапа развертывания КТС к этапу сближения целесообразно производить на реверсном участке траектории. Для выбора закона управления натяжением троса, обеспечивающего мягкую встречу и стыковку модулей на первоначальной орбите КА, необходимо знать начальные условия движения. Обзор и исследования различных законов управления свертыванием КТС опубликованы в работе [4].
Существенными недостатками описанного способа являются: сложность программ управления процессом свертывания, предполагающих наличие информации о текущем фазовом состоянии модулей КА, а также неустойчивость траекторий сближения.
Предлагаемый авторами способ выполнения маневра уклонения для защиты КА от столкновения на орбите с другими телами направлен на упрощение схемы маневра и программы управления процессом подачи-выборки троса и, как следствие, упрощение устройств систем управления, их реализующих, и повышение надежности их работы.
Технология выполнения маневра уклонения базируется на запатентованном способе развертывания КТС [9] и предполагает следующую последовательность операций, проиллюстрированных графически на фиг. 3:
1. В угрожаемый период производят расстыковку модулей КА и их трансверсальное расталкивание малым импульсом (ΔV<2 м/с).
2. При взаимном удалении связанных тросом модулей КА по траекториям относительного движения OA и ОВ (штрихпунктирная линия) производят подачу троса с устройства депонирования с постоянным натяжением. При этом фиксированная величина перегрузки n от силы натяжения троса пропорциональна величине импульса скорости расталкивания  , нормированного по величине круговой скорости КА:
, нормированного по величине круговой скорости КА:
 .
.
В работах [5, 6] показано, что такое управление позволяет стянуть петли (фиг. 1) на траектории относительного движения модулей КА в точку излома траектории (точки А и В на фиг. 3). На траектории развертывания кратковременный максимум скорости подачи троса не превышает семикратной величины импульса расталкивания i=6,44 ΔV. При этих условиях процесс развертывания системы завершается на слабо натянутом тросе в положении АВ на фигуре 3. В этот момент при нулевой относительной скорости относительное расстояние  (нормированное по модулю геоцентрического радиуса исходной орбиты КА) между модулями КА равно величине
(нормированное по модулю геоцентрического радиуса исходной орбиты КА) между модулями КА равно величине  . При этом время полного развертывания троса соизмеримо с периодом обращения КА по исходной орбите.
. При этом время полного развертывания троса соизмеримо с периодом обращения КА по исходной орбите.
3. В точках А и В излома траекторий выполняются условия самопроизвольного перехода связки модулей КА в режим попутного маятникового движения, если при этом подача троса застопорена [5, 6, 9]. После фиксирования подачи троса связка модулей КА переходит на траектории маятникового движения АА* и ВВ* соответственно (штриховые линии). Полупериод попутного маятникового движения до положения А*В* равен 0,75 долей периода обращения КА. Параметры относительного движения модулей в этом положении такие же, как и в положении АВ.
4. Из этого положения производят перевод модулей на траектории взаимного сближения и встречи А*О и В*О (пунктирные линии) с выборкой троса при постоянной перегрузке от силы натяжения  .
.
5. Сближение модулей КА в точке О происходит по касательной к исходной орбите с относительной скоростью ΔV, равной по величине начальному импульсу расталкивания.
6. Далее выполняется демпфирование и стыковка модулей или переход на второй цикл маневра. Время полного цикла маневра равно 2,75 периода обращения КА по исходной орбите.
Все этапы схемы такого маневра, а также анализ характеристик маневра (энергетических, временных, позиционных) и механических характеристик системы в целом (массово-габаритные и инерционно-массовые характеристики) подробно исследованы в монографии [5].
Предложенный способ выполнения маневра уклонения для защиты КА от столкновения технологически прост, так как обладает свойством пространственно-временной симметрии, а его реализация предполагает достаточно простые устройства и алгоритмы управления.
Предлагаемый нами способ защиты КА от опасного сближения с другими телами находится в классе активных способов и позволяет изменять орбиту КА и выходить из опасной зоны сближения с другими телами без использования двигательной установки и расхода бортового ресурса рабочего тела. Максимальное удаление (по оси Oy в орбитальной системе координат в относительных единицах) модулей КА одинаковой массы из опасной зоны равно  . На фиг. 4 графически представлен пример выбора величины потребного импульса расталкивания для увода КА из опасной зоны на заданное расстояние.
. На фиг. 4 графически представлен пример выбора величины потребного импульса расталкивания для увода КА из опасной зоны на заданное расстояние.
Решение о разведении модулей КА принимается после того, как установлено, что прогнозируемая траектория опасного элемента проходит в опасной близости от КА. Время начала выполнения маневра уклонения упреждает прогнозируемое событие столкновения на величину, равную половине длительности цикла маневра, примерно 1,37 долей периода обращения КА по исходной орбите. Время упреждения можно сократить до половины периода обращения КА, но при этом максимальное удаление модулей КА из опасной зоны сократится в два раза [8].
Современные средства контроля космического пространства и технологии информационного обеспечения позволяют своевременно представлять сведения о возможном столкновении аппаратов с летящими объектами на орбите, что позволит применить для защиты КА предлагаемый способ.
При выполнении маневра уклонения связанных блоков КА от столкновения с техногенными объектами в опасной зоне остается лишь трос, соединяющий блоки. Поэтому существует вероятность разрыва троса техногенными объектами. В случае разрыва троса модули КА перейдут на свободные траектории, параметры которых мало отличаются от параметров исходной орбиты, что практически не окажет влияние на целевое функционирование модулей КА, если предусмотрен режим их автономного функционирования. Если такой режим не предусмотрен или невозможен принципиально, то тогда в качестве одного из сегментов связки необходимо использовать балластную массу. Целесообразность такого конструктивного решения можно предварительно оценить по вероятности события разрушения троса техногенным объектом.
Список литературы
1. Андреев А.В., Константинов М.С. Системы летательных аппаратов с обменом энергией. // Тр. 11 чт., посвящ. разраб. науч. наследия и развитию идей К.Э. Циолковского, Калуга, 1976. - Секц. Мех. косм. полета. - М., 1978. - С. 126-135.
2. Динамика космических систем с тросовыми и шарнирными соединениями. /А.П. Алпатов, В.В. Белецкий, В.И. Драновский, А.Е. Закржевский, А.В. Пироженко, Г. Трогер, B.C. Хорошилов - Москва-Ижевск: НИЦ «Регулярная и хаотическая динамика», Институт компьютерных исследований, 2007. - 560 с.
3. Иванов В.Α., Купреев С.А. Повышение безопасности космических полетов за счет применения специальных тросовых систем. //Четырнадцатая Всероссийская научно-практическая конференция «Актуальные проблемы защиты и безопасности». Т.1. - СПб, 2011. - С. 670-682.
4. Иванов В.А., Ситарский Ю.С. Динамика полета системы гибко связанных космических объектов. - М.: Машиностроение, 1986. - 248 с.
5. Щербаков В.И. Спуск с орбиты малого КА с помощью космической тросовой системы. - LAP LAMBERT Academic Publishing, Saarbrucken, Germany, 2012. - 232 c.
6. Щербаков В.И. Эволюции траекторий возмущенного относительного движения малого КА при пассивном развертывании космической тросовой системы. //Труды ВКА имени А.Ф. Можайского. Вып. 636 - СПб.: ВКА имени А.Ф. Можайского, 2012 - С. 5-9.
7. Щербаков В.И. Закрутка космической тросовой системы с помощью гравитационных и внутренних сил. // Полет. - 2012, №5. - С. 52-59.
8. Щербаков В.И. Характерные точки траекторий относительного движения малого КА в окрестности орбитальной станции. // Труды ВКА имени А.Ф. Можайского. Выпуск 633. - СПб.: ВКА имени А.Ф. Можайского, 2011. - С. 137-143.
9. Пат. 2497729, Российская Федерация, МПК B64G 1/24, 1/62. Способ доставки с орбитальной станции на Землю спускаемого аппарата на основе использования пассивного развертывания космической тросовой системы [Текст] / Щербаков В.И., Софьин А.П.; заявитель и патентообладатель Федеральное государственное военное образовательное учреждение высшего профессионального образования Военно-космическая академия им. А.Ф. Можайского Министерства обороны Российской Федерации (RU). - №2011144048; заявл. 31.10.2011; опубл. 10.05.2013.
10. Пат. 2481256, Российская Федерация, МПК B64G 1/56. Устройство для защиты космического аппарата от метеорных частиц [Текст] / Семкин Н.Д., Бабенко А.В., Телегин A.M.; заявитель и патентообладатель Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Самарский государственный аэрокосмический университет имени академика СП. Королева (национальный исследовательский университет)" (СГАУ) (RU). - №2011142950; заявл. 24.10.2011; опубл. 10.05.2013.
11. Пат. 2457160, Российская Федерация, МПК B64G1/56. Экран для защиты космического аппарата от высокоскоростного ударного воздействия метеороидов [Текст] / Тулин Д.В, Клишин А.Ф., Добрица Д.Б., Чухлов В.Д.; заявитель и патентообладатель Федеральное государственное унитарное предприятие "Научно-производственное объединение им. С.А. Лавочкина" (RU). - №2011108054; заявл. 03.03.2011; опубл. 27.07.2012.
12. Пат. 2299839, Российская Федерация, МПК B64G 1/56, F41H 5/02. Устройство для защиты космических аппаратов и станций от высокоскоростного ударного воздействия частиц космической среды [Текст] / Кононенко М.М., Малкин А.И., Шумихин Т.Α.; заявитель и патентообладатель Кононенко М.М., Малкин А.И. (RU). - №2005138100; заявл. 08.12.2005; опубл. 27.05.2007.
13. Пат. 2299838, Российская Федерация, МПК B64G 1/56, F41H 5/007. Устройство для защиты космических аппаратов и станций от высокоскоростного ударного воздействия частиц космической среды [Текст] / Кононенко М.М., Малкин А.И., Шумихин Т.Α.; заявитель и патентообладатель Кононенко М.М., Малкин А.И. (RU). - №2005138101; заявл. 08.12.2005; опубл. 27.05.2007.
14. Пат. 2209161, Российская Федерация, МПК B64G 1/56, 1/68. Способ защиты космического аппарата и устройство для его осуществления [Текст] / Янулевич Э.М., Назаров Ю.П., Шувалов СМ., Дьяконова О.С.; заявитель и патентообладатель Закрытое акционерное общество "Производственное объединение "Астротехника". - №2001116261; заявл. 19.06.2001; опубл. 27.07.2003.
15. Пат. 2294866, Российская Федерация, МПК B64G 1/52, B64G 1/56. Способ защиты космических объектов [Текст] / Анисимов В.Ю., Борисов Э.В., Ролдугин В.Д., Пономарев С.А.; заявитель и патентообладатель Военная академия Ракетных войск стратегического назначения имени Петра Великого (RU). - №2005116764; заявл. 02.06.2005; опубл. 10.03.2007.
16. Пат. 2374150, Российская Федерация, МПК B64G 1/52, B64G 1/56. Способ защиты космических аппаратов [Текст] / Новосельцев Д.А.; заявитель и патентообладатель Новосельцев Д.A. (RU). - №2008108324; заявл. 03.03.2008; опубл. 27.11.2009.
17. Пат. 2166464, Российская Федерация, МПК B64G1/56. Способ увеличения сроков активного существования космических аппаратов [Текст] / Гуров А.Е.; заявитель и патентообладатель Гуров А.Е. - №96105701; заявл. 25.03.1996; опубл. 10.05.2001.
18. Пат. 2137682, Российская Федерация, МПК B64G 1/56. Способ увеличения сроков активного существования космических аппаратов [Текст] / Гуров А.Е.; заявитель и патентообладатель Гуров А.Е. - №96124535; заявл. 25.12.1996; опубл. 20.09.1999.
19. Пат. 2136551, Российская Федерация, МПК B64G 1/56. Способ увеличения сроков активного существования космических аппаратов [Текст] / Гуров А.Е.; заявитель и патентообладатель Гуров А.Е. - №95122314/28; заявл. 29.12.1995; опубл. 10.09.1999.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗВЕРТЫВАНИЯ КОСМИЧЕСКОЙ ТРОСОВОЙ СИСТЕМЫ ПРИ ДОСТАВКЕ СПУСКАЕМОГО АППАРАТА С ОРБИТАЛЬНОЙ СТАНЦИИ НА ЗЕМЛЮ | 2014 |
|
RU2564930C1 |
| СПОСОБ ДОСТАВКИ С ОРБИТАЛЬНОЙ СТАНЦИИ НА ЗЕМЛЮ СПУСКАЕМОГО АППАРАТА НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ПАССИВНОГО РАЗВЕРТЫВАНИЯ КОСМИЧЕСКОЙ ТРОСОВОЙ СИСТЕМЫ | 2011 |
|
RU2497729C2 |
| СПОСОБ РАЗВЕРТЫВАНИЯ И ЗАКРУТКИ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС КОСМИЧЕСКОЙ ТРОСОВОЙ СИСТЕМЫ С ПОМОЩЬЮ ГРАВИТАЦИОННЫХ И ВНУТРЕННИХ СИЛ | 2012 |
|
RU2536611C2 |
| УСТРОЙСТВО РАЗРУШЕНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫХ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2018 |
|
RU2688111C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ОБ ОПАСНЫХ СИТУАЦИЯХ В ОКОЛОЗЕМНОМ КОСМИЧЕСКОМ ПРОСТРАНСТВЕ И НА ЗЕМЛЕ И АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2570009C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2021 |
|
RU2768994C1 |
| Способ изменения траектории опасного космического объекта | 2019 |
|
RU2745378C1 |
| СПОСОБ ОЧИСТКИ ОРБИТ ОТ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2531679C2 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКИХ АППАРАТОВ НА ОРБИТУ | 2023 |
|
RU2794486C1 |
| Космический комплекс очистки околоземного космического пространства от малогабаритного космического мусора | 2015 |
|
RU2612752C2 |

Изобретение относится к способам защиты космических аппаратов (КА) от столкновения на орбите с другими телами, в частности, космическим мусором. Способ включает импульсное расталкивание и разведение связанных тросом модулей, образующих КА, для их вывода из опасной зоны. После развертывания троса и фиксации его длины связку модулей переводят в режим попутного маятникового движения. По его завершении осуществляют взаимное сближение модулей, выбирая трос, и последующую их стыковку. Подача и выборка троса выполняются с постоянной силой натяжения, перегрузка от которой пропорциональна величине импульса скорости расталкивания модулей. Технический результат изобретения направлен на упрощение технологии, средств и алгоритмов управления данным маневром уклонения КА. 4 ил.
Способ выполнения маневра уклонения космического аппарата (КА) от столкновения на орбите с другими телами, предполагающий использование двухмодульной конструкции КА, включающий расстыковку соединенных тросом модулей, импульсное расталкивание их в плоскости исходной орбиты по линии местного горизонта, подачу троса для выведения модулей из опасной области при их взаимном удалении до выхода на рубеж реверсного движения, выборку с натяжением троса для сближения модулей КА и их последующей стыковки, отличающийся тем, что в конце этапа развертывания троса и фиксирования его подачи связку модулей КА переводят в режим попутного маятникового движения, по завершении которого производят выборку троса, причем подачу и выборку троса выполняют с постоянным натяжением с перегрузкой  где
где  - величина импульса скорости расталкивания, нормированная по величине круговой скорости КА.
- величина импульса скорости расталкивания, нормированная по величине круговой скорости КА.
| ИВАНОВ В.Α?., КУПРЕЕВ С.А | |||
| Повышение безопасности космических полетов за счет применения специальных тросовых систем | |||
| XIV Всерос | |||
| н.-практ | |||
| конф | |||
| "Актуальные проблемы защиты и безопасности" | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПб | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| US 5082211 A1, 21.01.1992 | |||
| US 20100193640 A1, 05.08.2010 | |||
| СПОСОБ УВЕЛИЧЕНИЯ СРОКОВ АКТИВНОГО СУЩЕСТВОВАНИЯ КОСМИЧЕСКИХ АППАРАТОВ | 1996 |
|
RU2137682C1 |
| СПОСОБ ДОСТАВКИ С ОРБИТАЛЬНОЙ СТАНЦИИ НА ЗЕМЛЮ СПУСКАЕМОГО АППАРАТА НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ПАССИВНОГО РАЗВЕРТЫВАНИЯ КОСМИЧЕСКОЙ ТРОСОВОЙ СИСТЕМЫ | 2011 |
|
RU2497729C2 |
| СПОСОБ РАЗВЕРТЫВАНИЯ ОРБИТАЛЬНОЙ ТРОСОВОЙ СИСТЕМЫ | 1996 |
|
RU2112715C1 |

