Изобретение относится к области космической техники и может быть использовано для коллокации (баллистического обеспечения гарантированного сосуществования) в одной и той же области околостационарной орбиты (ОСО) по долготе и широте относительно точки стояния космических аппаратов (КА). КА на ОСО называются геостационарными КА. В тексте под КА следует понимать геостационарный КА. ОСО – реальная орбита КА; геостационарная орбита (ГСО) – идеализация ОСО.
Коллокацию КА можно проводить по согласованным схемам. Эти схемы сводятся к равноудалению точек прицеливания векторов еn [еn; (Ω+ω)n] (n =1,2,…) и in [in; Ωn] (n = 1,2,…) в соответствующих фазовых плоскостях (ФП) КА и поддержанию концов векторов еn и in внутри соответствующих областей выбранных радиусов, центрами которых являются соответствующие точки прицеливания. Идеальным вариантом согласованной коллокации считается для двух КА разнесение долгот восходящих узлов (Ωn) и прямых восхождений перигеев (Ω+ω)n точек прицеливания на 180°, причем аргументы широты перигеев КА должны быть близки нулю или 180°. Для трех КА величину 180° в отношении точек прицеливания заменяют на 120°. Однако за кажущейся простотой схем скрывается сложная и затратная процедура управления векторами коллокации. Коллокация здесь рассматривается как способ управления движением центров масс, гарантирующий от столкновений КА. Эта задача актуальна и удовлетворительно решается для двух КА (даже при нулевых наклонениях) при условиях:
Ω1 ≈ Ω2 и: ω1 ≈ 0, ω2 ≈ 
Ω1 ≈ Ω2 +
то есть тогда, когда восходящие узлы орбит разнесены на 180°; для каждой из орбит линия узлов совпадает с линией апсид; направления на восходящий узел и перигей одной из орбит совпадают, другой - взаимно противоположны. Гарантированное минимальное межспутниковое расстояние при реальном эксцентриситете орбит КА в состоянии коллокации порядка 0,00015 (эксцентриситет для удержания по долготе в области ± 0,05° при этом не более 0,00029) составляет 12,6 км.
Центры управления всеми КА, находящимися в единой области удержания по широте и долготе, следуют единой стратегии коллокации, обмениваясь баллистической информацией.
Метод согласованной коллокации является универсальным, то есть независимым от типа КА, участвующих в совместном удержании. В процессе совместного функционирования КА точки прицеливания должны изменяться синфазно в заданной области удержания относительно точки стояния. Благодаря такой стратегии поддержания будет постоянно обеспечиваться наклон между плоскостями орбит, и взаимные расстояния между КА будут не менее допустимых (8 – 10 км).
Для гарантированной коллокации требуется перманентный процесс обмена баллистической информацией между центрами управления КА. Такой процесс может давать сбои. Кроме того, нельзя исключать принципиальную невозможность взаимодействия между центрами управления КА. Проще находиться в состоянии автономной коллокации (самоколлокации): когда к процессу коллокации не привлекаются другие КА и их центры управления. При постановке такой задачи следует учитывать, что линия узлов и линия апсид орбиты смежных КА (СКА) могут пересекаться под произвольным углом.
Идея автономной коллокации, не накладывающей никаких обязательств на центр управления СКА, представляется актуальной и наиболее эффективной.
Далее по тексту под смежным КА (СКА) подразумевается КА, с которым следует находиться в состоянии коллокации, и под КА с самоколлокацией (КАСК) подразумевается КА, взявший на себя всю ответственность за коллокацию в заданной области удержания (ОУ) по долготе и широте. Все КА, находящиеся в единой ОУ, по отношению друг к другу смежные.
Существуют способы автономной коллокации, когда в ОУ находится один СКА, например, RU 2559371 С2, RU 2558959 С2, RU 2703696 С1. Будем ориентироваться на способы автономной коллокации, когда в ОУ находятся 2 и более СКА, число которых может быть ограничено только проблемами их сосуществования в этой области.
Известен способ мониторинговой коллокации на ГСО (RU 2721812 С1, МПК: B64G 1/10, B64G 1/26, B64G 3/00), включающий измерения параметров орбиты каждого КА, определение по ним текущих значений орбитальных элементов каждого КА, сброс данных на Землю и управление мониторинговым КА (МКА) (КАСК в части баллистического обеспечения) – в оптическом диапазоне, выявление за время до приведения МКА в заданную область удержания по долготе по данным независимых траекторных измерений стратегии управления движением центра масс СКА и проведение с помощью двигателей малой тяги коррекций параметров орбиты, отличающийся тем, что разрабатывают проект мониторинговой коллокации, исходя из концептуальных условий:
g ГСО – ω2ГСО⋅ rкр = аРДК ; (3)
r кр < rπ СКА , (4)
где gГСО – ускорение свободного падения на ГСО, км/с2;
ω ГСО – угловая скорость движения по ГСО, с-1;
r кр – радиус круговой орбиты МКА, км;
а РДК – ускорение от непрерывной работы радиальных двигателей коррекции (РДК), позволяющее МКА двигаться по круговой орбите радиуса rкр < rπ СКА с угловой скоростью движения по ГСО, км/с2;
r π СКА – минимальный возможный радиус перигея орбиты СКА в заданных условиях нахождения СКА на орбитальной позиции, км,
находят компромиссные значения rкр и аРДК, системе коррекции МКА придают два РДК малой тяги с расположением их на полуоси минус Х связанной с КА системы координат (полуось минус Х направлена на центр Земли) так, чтобы направления векторов тяги в пределах точности установки двигателей проходили через центр масс МКА, бортовому приемо-передающему комплексу придают приемную антенну с расположением ее на полуоси плюс Х связанной с КА системы координат, в процессе приведения на орбитальную позицию мониторинга и удержания СКА, коррекциями орбиты МКА достигают круговой орбиты радиуса rкр, в течение всего этапа мониторинга СКА проводят последовательные включения одного и второго РДК на время, не превышающее разрешенной техническими условиями на двигатель максимальной длительности непрерывной работы, при этом время включения последующего РДК всегда раньше времени выключения работающего РДК на интервал подготовки РДК к работе (интервал выхода тяги на рабочий режим), штатными двигателями коррекции осуществляют поддержание МКА на линии СКА-Земля.
Способ использует ускорения РДК для нахождения КАСК под СКА при средней угловой скорости полета КАСК равной средней угловой скорости полета СКА в области коллокации, то есть – при угловой скорости движения КАСК, соответствующей ГСО - 2π/86164, с-1. Особенностью данного изобретения является то, что такой вариант баллистического обеспечения удержания КАСК решает задачу коллокации КАСК в единой ОУ с каким угодно количеством КА. Это возможно потому, что КАСК движется по особенной орбите, имеющей почти нулевой эксцентриситет и гарантированно меньший радиус круговой орбиты в сравнении с радиусами перигеев СКА, не позволяющий другим СКА пересекать орбитальный круг КАСК. Контрольная ФП [ΔL; Δrкр], где ΔL – отклонение гринвичской долготы КАСК от центральной точки ОУ, Δrкр – отклонение радиуса орбиты КАСК от радиуса ГСО – 42164 км.
Недостатком способа являются значительные затраты рабочего тела в системе коррекции.
Известен способ автономной коллокации на ОСО (RU 2716394 С1, МПК: B64G 1/10, B64G 1/24), включающий выявление за время приведения КАСК в заданную область удержания по широте и долготе (ОУ) относительно точки стояния по данным независимых траекторных измерений стратегий управления движением центров масс СКА, измерения параметров орбиты каждого КА, определение по ним текущих значений орбитальных элементов каждого КА, уточнение тяги двигателей коррекции и проведение коррекций орбиты КАСК, в том числе – коррекций уклонения, отличающийся тем, что при рассмотрении возможности постановки КАСК в заданную ОУ по долготе определяют номинальный трасс-эллипс полета (НТЭП) КАСК, представляющий уточненную ОУ КАСК в ее номинальном (нейтральном) положении по долготе, для чего половину общей ширины реальной рабочей ОУ (РРОУ) по долготе центров масс всех СКА, находящихся вблизи точки стояния, задают (назначают) одной из полуосей НТЭП, в качестве другой полуоси НТЭП задают наклонение равное четырехкратной РРОУ по долготе, определяют стратегии управления центрами масс дальних СКА (если они есть) в ОУ, прилегающих с обеих сторон по долготе к заданной ОУ, за время приведения КАСК в заданную ОУ проводят коррекции наклонения и вектора эксцентриситета с тем, чтобы наклонение орбиты КАСК стало равным четырехкратной РРОУ по наклонению, аргумент широты перигея орбиты КАСК стал равным π/2 или 3π/2, и двойной модуль эксцентриситета на момент начала этапа удержания КАСК в заданной ОУ составил величину эквивалентную долготной полуоси НТЭП, удержание КАСК и автономную коллокацию проводят совмещенными (одновременными) коррекциями периода (долготы), векторов наклонения и эксцентриситета последовательными включениями из выбранной диагональной пары двигателей наклонения на обоих внутри витка оптимальных для компенсации вековых уходов вектора наклонения активных участках, при этом выбор пары двигателей наклонения и очередность их работы определяют, исходя из стратегии эффективной компенсации суточных изменений эксцентриситета, в случаях возникновения опасности критического сближения КАСК с СКА проводят коррекции уклонения, представляющие собой несрочные – совмещенные с коррекциями наклонения, или самостоятельные (срочные) коррекции периода, а также коррекции среднего эксцентриситета орбиты, трансформирующие долготную ось трасс-эллипса, с последующим возвратом трассы полета КАСК к НТЭП и установкой НТЭП в оптимальное положение в отсутствие опасности критического сближения КАСК с СКА.
Способ может быть использован для удержания КА в заданном диапазоне долгот и широт рабочей позиции на орбите без помех другим КА. Достигается тем, что средняя за виток долгота подспутниковой точки находится в центре области удержания с минимальным люфтом, а текущая подспутниковая точка в течение суток совершает эволюцию по трасс-эллипсу, охватывающего всю РРОУ на ФП георгафических координат ГСО. Контрольная ФП [ΔL; φ], где φ – широта КАСК.
Недостатком способа является коллокация в приграничных полосах отчуждения для всех КА, находящихся внутри и вовне РРОУ. Надо быть всегда готовым к совершению маневра уклонения, транформирующего долготную ось трасс-эллипса, с последующим возвратом трассы полета КАСК к НТЭП и установкой НТЭП в оптимальное положение в отсутствие опасности критического сближения КАСК с СКА. Маневр уклонения, при регулярном процессе удержания наклонения орбиты КАСК, не должен приводить к перерасходу топлива при рациональном подходе к расчету параметров коррекции, но зачастую исключает долгосрочное планирование работ (например, месячный план работ) с КАСК в части баллистического обеспечения полета.
Наиболее близким к заявленному решению является способ автономной коллокации на ГСО (RU 2721813 С1, МПК: B64G 1/10, B64G 1/24, B64G 3/00), включающий слежение за орбитами каждого КА, определение номинальной зависимости сидерического периода обращения после коррекции удержания (корректирующего воздействия) от текущего положения КА по долготе относительно центра области удержания, расчет длительности работы двигателей КАСК по формулам:
где τ1, τ2 – длительности работы двигателей, с;
Jn, Jτ – импульсы тяги, требуемые для коррекций соответственно вектора наклонения орбиты и периода обращения КА, Н·с;
F1, F2 – тяги двигателей, Н;
θ1, θ2 – углы отклонения векторов тяги двигателей от нормали к плоскости орбиты в плоскости рысканья по наименьшей дуге,
и проведение коррекции парой двигателей, установленных по разные стороны от нормали к орбите, для чего производят последовательно их включения на расчетные длительности работы, отличающийся тем, что заблаговременно, до приведения КАСК в заданную область удержания по широте (наклонению) и долготе, по данным независимых траекторных измерений выявляют максимальное возможное значение эксцентриситета (emax) орбит СКА, вектор эксцентриситета орбиты КАСК выставляют в направлении на Солнце, модуль эксцентриситета коррекциями орбиты делают бóльшим emax, КАСК переводят на солнечносинхронную орбиту, для чего коррекциями вектора эксцентриситета выравнивают среднегодовую скорость вращения вектора эксцентриситета орбиты КАСК с угловой скоростью движения Земли вокруг Солнца, в случаях опасного сближения с СКА при смене стратегии его удержания проводят коррекции уклонения, представляющие собой коррекции эксцентриситета орбиты КАСК. Этот способ взят за прототип.
Способ может быть использован для удержания КА в заданном диапазоне долгот и широт рабочей позиции на орбите без помех другим КА. Достигается тем, что: средняя за виток долгота подспутниковой точки находится в центре области удержания с минимальным люфтом, благодаря выбору оптимальной зависимости сидерического периода обращения после коррекции удержания от текущего положения КАСК по долготе относительно центра области удержания (орбитальной позиции) и последовательным включениям двигателей коррекции на расчетные длительности; эксцентриситет орбиты КАСК заведомо больше максимальных возможных эксцентриситетов СКА, что создает гарантии безопасной эволюции КАСК внутри области удержания и гарантии безопасного прохождения КАСК пограничных коридоров высоты. Контрольная ФП [ΔL;ΔТ], где ΔТ – отклонение периода обращения (сидерического) КАСК от звездных суток.
Недостатком прототипа является необходимая готовность совершения манёвра уклонения КА, что исключает долгосрочное планирование работ с КАСК в части баллистического обеспечения полета.
Условия эксплуатации ГСО все более усложняются. В описании прототипа есть общее понятие, функциональное обобщение: «безопасное прохождение КАСК пограничных коридоров высоты». Это обобщение не вошло в формулу прототипа, однако оно, в принципе, может являться существенным ограничительным признаком в заявляемом изобретении.
Для заявленного способа выявлены следующие общие с прототипом существенные признаки: способ автономной коллокации на ОСО, включающий безопасное прохождение КАСК пограничных коридоров высоты на геостационарной орбите ГСО.
Технической проблемой изобретения является автономная коллокация, исключающая проведение коррекций уклонения КАСК на ОСО, превышение расхода топлива против обычной стратегии удержания КА в заданной ОУ по долготе и широте и не нарушающая долгосрочного планирования работ с КАСК.
Указанная техническая проблема решается способом автономной коллокации на околостационарной орбите, включающим безопасное прохождение КАСК пограничных коридоров высоты на ГСО, отличающимся тем, что до начала функционирования КАСК на ОСО выбирают коридоры высоты - места протяженностью по географической долготе не менее 0,2°, свободные от КА и наиболее близкие к желаемой (и необязательной к регистрации) ОУ по долготе, двигатели коррекции включают так, чтобы относительные траектории движения КАСК в ФП [ΔL;Δr], где ΔL – отклонение по долготе от номинальной долготы стояния; Δr – отклонение радиуса орбиты КАСК от радиуса ГСО, представляли замкнутые траектории и располагались вне области движения в этой же плоскости других геостационарных КА, и выход на ГСО КАСК проходил в выбранных коридорах высоты.
Кроме того, для группового движения КА по ОСО, в отсутствие возможности их нахождения в желаемых ОУ, выбирают фазовые трассы движения, размах которых ограничен минимально допустимыми углами места для приемных и передающих антенн ЗС связи и наличием гарантированных коридоров высоты на ГСО.
Кроме того, коридорам высоты придают статус основных и резервных.
Суть изобретения заключается в организации относительного движения КАСК в фазовом пространстве [ΔL;φ;Δr] вне областей, где находятся СКА за счет вертикального и горизонтального эшелонирования трасс движения КАСК. Необходимая конфигурация траекторий относительного движения формируется посредством штатных орбитальных маневров в совокупности с пассивным движением КАСК.
Техническим результатом настоящего изобретения является удаление КАСК по высоте полета от остальных КА при определенных гарантиях безопасности переходов КАСК по высоте относительно номинальной ГСО. Такой технический результат позволяет проводить коллокацию с неограниченным количеством СКА, области удержания которых включены в область движения КАСК по долготе.
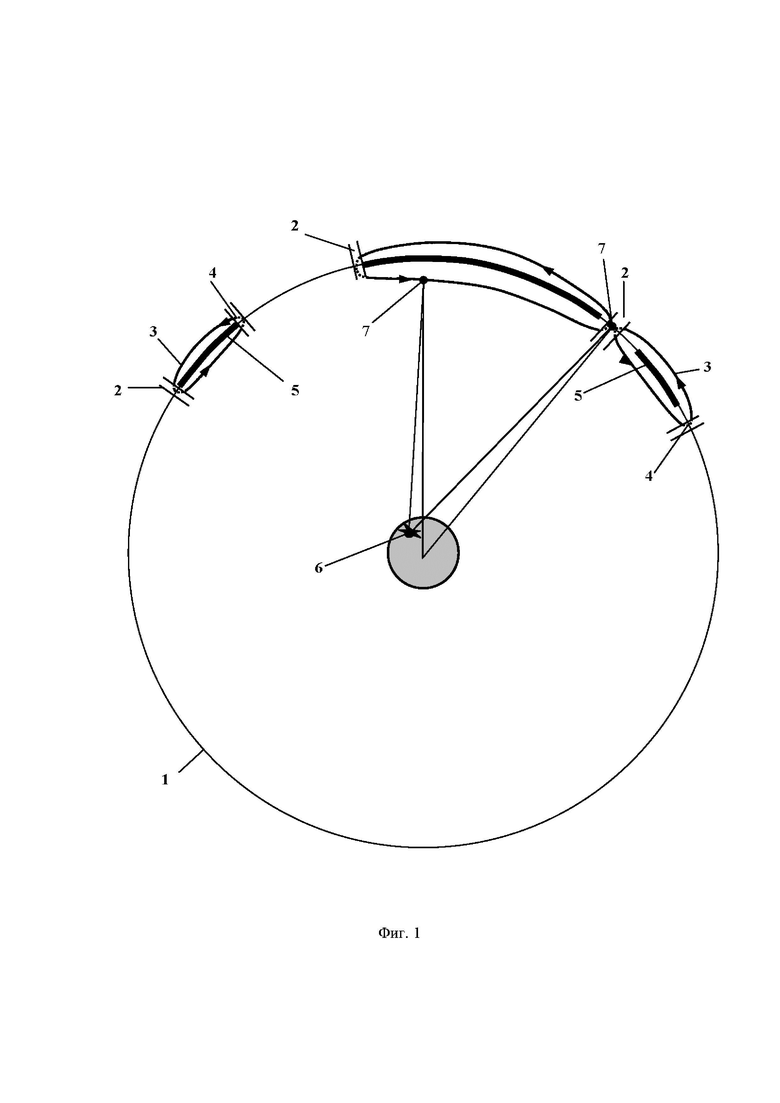
На фиг. 1 показана принципиальная схема автономной коллокации. Введены следующие обозначения:
1 – ГСО;
2 – коридор высоты;
3 – часть траектории движения (ТД) КАСК с номинально постоянным дрейфом;
4 – активная часть ТД КАСК, формируемая преимущественно коррекциями орбиты;
5 – суммарная запретная зона стояния для КАСК – общая ОУ СКА;
6 – земная станция (ЗС);
7 – КАСК.
На фиг.1 в ФП [ΔL;Δr] линиями 3 и 4 обозначены выбранные для работы на ОСО ТД, формируемые влиянием вкупе внешних космических факторов и проведением коррекций наклонения орбиты.
Следует сказать, что перерасход топлива на формирование ТД исключен ввиду того, что формирование этих ТД происходит исключительно за счет выбора стратегии коррекций наклонения орбиты (пересмотра выбора номеров двигателей коррекции) при неизменной суммарной суточной норме работы двигателей коррекции наклонения, или в более общем плане - при неизменном топливном бюджете.
Основу заявленному способу коллокации составляют следующие соображения.
1. На сегодня на ОСО в рабочем фазовом пространстве [ΔL;φ;Δr] находятся порядка 650 действующих КА, и, допустим, еще 650 КА, прекративших свое активное существование и не уведенных с ГСО. Значит, средняя плотность освоения ГСО 1 составляет от 0,27 до 0,28 градусов на один КА. Участки ГСО 1 востребованы неравномерно. Реальная же плотность определенных участков ГСО заставляет заниматься коллокацией, в то время как другие протяженные участки, расположенные в основном над акваториями океанов, могут не иметь вообще ни одного КА. Но для заявленного способа автономной коллокации величина отклонения этих участков (они же – коридоры высоты) от желаемой долготы стояния не имеет принципиального значения.
2. Погрешность определения наиболее проблемного положения – вдоль орбиты составляет не более 3 км; погрешность определения и прогнозирования положения КАСК на интервале между траекторными измерениями 7 суток – не более 4,5 км; взаимная погрешность определения и прогнозирования КАСК и СКА не более 9 км; прибавим, для гарантии исключения всяких случайностей управления, еще 3 км. Всего 12 км. Это небольшая величина по сравнению с протяженностью вдоль орбиты коридора высоты в 147 км (это 0,2° по долготе). Если КАСК не будет приближаться изнутри к границам коридоров высоты 2 менее чем на 12 км, беря на себя свои и чужие ошибки навигации, его нахождение строго на ГСО 1 в пределах 123 км коридора высоты 2 можно считать вполне определенным и ответственным.
Погрешность определения положения по высоте (радиусу) составляет не более 150 м; погрешность определения и прогнозирования положения КАСК на интервале между траекторными измерениями 7 суток – не более 850 м; взаимная погрешность определения и прогнозирования КАСК и СКА не более 1,7 км; прибавим, для гарантии исключения всяких случайностей управления, еще 0,5 км. Всего 2,2 км. Значит, при возложении КАСК на себя своих и чужих ошибок навигации, эшелон высоты полета КАСК над (под) полосой полета СКА в ФП [ΔL;Δr] должен находиться на отдалении в 2,2 км и, с учетом того, что максимальное удаление СКА от ГСО 1 для ОУ ±0,1° не более 3,3 км (10 с по периоду обращения), - на гарантируемом отдалении в ±5,5 км от ГСО. Это соответствует дрейфу по долготе 4,2’/сут. Для примера, дугу (суммарную запретную зону 5) в 5 градусов из конца в конец КАСК пройдет, с учетом заходов в близлежащие коридоры высоты 2, за 150 суток. Вычет по 12 км (1 мин по долготе и 6 ч по времени дрейфа от номинальной границы коридора 2) из коридора высоты с обеих сторон позволяет совершить маневр смены направления дрейфа КАСК на ОСО.
Таким образом, нахождение КАСК на ОСО в предлагаемых условиях можно считать вполне определенным и ответственным.
3. Если коридоры высоты в прототипе являются пограничными полосами смежных узких ОУ, внутри которых могут находиться КА (КАСК с внутрисуточным движением от границы к границе, СКА внутренние и внешние), где требуется постоянная готовность к коррекциям уклонения, то в предлагаемом техническом решении коридор высоты – участок ГСО, свободный от каких-либо КА, кроме КАСК, гарантирующий беспрепятственное прохождение ГСО по высоте и выход на ОСО с заданным дрейфом по долготе.
4. В плане слежения за КАСК 7 на ОСО представим, что антенна ЗС 6 осью своей диаграммы направленности (ДН) наведена на центр области дрейфа КАСК. При дрейфе (др) КАСК по долготе в пределах ширины ДН ± Θдр = ± ΔLдр, необходимость в слежении за КА для ЗС 6 отсутствует. Ширина ДН антенны обычно измеряется по уровню половинной мощности и обозначается Θ0,5. Тогда отсутствие необходимости в слежении за КА соответствует условию:
2Θдр ≤ Θ0,5, (7)
при этом ширина ДН антенны выражается через ее диаметр D и длину волны λ как
Θ 0,5 = 70λ/D, градусы. (8)
В радиолиниях командно-измерительных систем (КИС) используют частоты 4 – 6 ГГц, что соответствует λ от 0,05 до 0,075 м, и при ширине Θдр равной 2° условие (7) с учетом условия (8) будет выполняться при D меньшем или равном 17,5λ, то есть от 0,875 до 1,300 м. В реальности антенны ЗС КИС имеют значительно большие размеры (равно – более узкие ДН). Поэтому на ЗС КИС слежение обеспечивать необходимо. С другой стороны, на борту КА антенны КИС имеют очень широкие ДН (не менее 700), и устройствами автоматического наведения их не оборудуют.
В отношении ЗС 6 связи. Размер антенн таких ЗС будет определяться энергетическими соотношениями в радиолинии, необходимыми для передачи информации с заданными скоростью и качеством. С большой вероятностью размер антенн окажется бόльшим, чем это необходимо для выполнения условия (8), то есть система слежения на ЗС связи будет необходима. Бортовые антенны связи устройствами автоматического наведения не оборудуют. С точки зрения реализации радиолиний для обмена связной информацией, опыт разработок КА с дрейфом по широте ± 5° и более показывает, что в процессе перемещения КА центральные земные станции не выходят за пределы зоны обслуживания, формируемой бортовой антенной с шириной луча от 2 до 3 градусов, поскольку при движении по широте поддерживается штатная ориентация оси минус Х и оси Y связанной с КА системы координат, и, из рассмотрения геометрии положения бортового луча связи, следует достаточность отклонения наземной антенны от центра рабочей области максимально (в меридианальной плоскости ЗС наземной антенны) на угол γ = (φ + Δγ), Δγ ≤ 0,178φ – доворот угла γ в рабочей вертикальной плоскости ЗС, равен 0,178φ: при изменении широты КА на 1 градус Δγ изменится на 10,7 минут. Те же угловые минуты вообще требуются для полного совмещения центра ДН бортовой антенны с центром ДН антенны ЗС. Но при ширине ДН Θ0,5 бортовой антенны даже в 1° ее доворот на 10,7 минут не требуется.
Всё сказанное ранее в плане слежения за КА справедливо и для дрейфа по долготе ± 5° и более, так как замена дрейфа по широте дрейфом по долготе, не обязательно внутривитковым, не имеет принципиального значения в вопросах слежения антеннами за КАСК 7 с ЗС 6.
ОПУ – опорно-поворотное устройство, предназначено для углового перемещения направления максимального излучения (приема) антенны ЗС 6. ОПУ (Фролов О.П. Антенны для земных станций спутниковой связи. М., «Радио и связь», 2000 г., стр. 94–100, [1]) должны обеспечивать, кроме прочего, реализацию режима наведения на КА и его автосопровождение. Основными параметрами ОПУ являются предельные значения угловых перемещений максимума ДН и скорости угловых перемещений. В состав ОПУ включен процессор, анализирующий уровень сигнала при пошаговом перемещении луча антенны ЗС, который выдает команды на корректировку эволюции луча согласно уровню сигнала так, чтобы каждый раз принимался с КА более сильный сигнал, чем тот, который принимался на предыдущем шаге. На стр. 95 [1] говорится: «После того как спутниковая связь окончательно перешла на работу с ретрансляторами, расположенными на ГСО (речь идет исключительно о геостационарных КА), основным элементом перемещения зеркал антенн ЗС стал электромеханический привод в виде винтового толкателя. Это устройство преобразует вращательное движение электродвигателя в линейное изменение длины винта привода. Так как в ОПУ используется малые передаточные числа преобразователя вращения в поступательное движение, то даже при использовании маломощных электродвигателей привод обеспечивает нужные усиления для перемещения зеркала, правда, при небольших скоростях». Но больших скоростей (а это скорости порядка от 1 до 2 градуса/с) на ОСО и геосинхронных 24-часовых орбитах и не надо.
Описание ОПУ из [1] показывает, что автослежение антенн ЗС КИС и ЗС связи в настоящее время – обычная практика и, следовательно, заявленный способ коллокации не требует дополнительных серьезных затрат на установку антенных систем с электроприводами для точного наведения антенн на объект связи.
Возможно, на борту КАСК будут находиться специальные узконаправленные антенны (УНА) бортового ретрансляционного комплекса. Все они подключены к системе поворота антенн (СПА). А поскольку долготный дрейф по дугам в 50 и более занимает несколько месяцев, то нет необходимости в системе автослежения этих антенн: достаточно регулярно, с умеренной периодичностью заниматься перенацеливанием этих узконаправленных антенн, рассчитывая и выдавая СПА программным обеспечением углы наведения УНА на заданные центры земной поверхности.
Изобретение позволяет организовать групповое движение геостационарных КА на ОСО. КА, не находясь в занятых СКА ОУ, решают при этом целевые задачи. В отсутствие возможности нахождения КА в желаемых ОУ выбирают фазовые ТД, размах которых ограничен только минимально допустимыми углами места для приемных и передающих антенн наземных станций связи и наличием гарантированных коридоров высоты на ГСО. Таким образом, наряду с практически стационарной (квазистационарной) орбитой с ее узкими ОУ при точках стояния по долготе и широте можно осваивать ОСО с протяженными замкнутыми ТД по долготе.
Для успешной коллокации КАСК и колонизации ОСО согласно данному изобретению необходимо иметь резервные коридоры высоты, так как правового статуса коридоры высоты не имеют. В непосредственной близости к желаемой ОУ коридоров высоты, полностью свободных от КА, может и не быть, но их можно обнаружить на отдалении. Коридоры высоты, исходя из анализа космической обстановки на ГСО, пока что всегда можно найти для своих целей.
Технический результат изобретения обеспечивается возможностью относительного движения в фазовом пространстве [ΔL;φ;Δr] вне эшелонов высоты геостационарных и геосинхронных 24-часовых КА, располагающихся в узких ОУ по долготе, сливающихся в одну запретную для КАСК зону стояния, за счет наличия мест на ГСО, свободных от КА.
КАСК в заявленном способе автономной коллокации решает задачу коллокации в полном объеме и в полной мере в номинальной области по долготе [(Lст - ΔL1);(Lст +ΔL2)], где Lст – номинальная долгота стояния; ΔL1, ΔL2 – соответственные отклонения от Lст, в которой могут находиться, допустим, сколь угодно много КА, являющихся для КАСК СКА. КАСК, согласно данному изобретению, можно считать транзитными для номинальных ОУ и в то же время удерживаемыми в них.
Изобретение относится к области космической техники и может быть использовано для коллокации (баллистического обеспечения гарантированного сосуществования) в одной и той же области околостационарной орбиты (ОСО) по долготе и широте относительно точки стояния космических аппаратов (КА). Способ состоит в том, что в выборе коридоров высоты на геостационарной орбите (ГСО) протяженностью по долготе не менее 0,2° до начала функционирования космического аппарата с самоколлокацией (КАСК). Коридоры высоты ГСО свободны от КА и близки к желаемой области удержания (ОУ) по долготе. Относительные траектории движения КАСК в фазовой плоскости [ΔL; Δr] - это замкнутые траектории и расположены вне области движения в этой же плоскости других геостационарных КА, где ΔL – отклонение по долготе от номинальной долготы стояния; Δr – отклонение радиуса орбиты КАСК от радиуса ГСО. При этом выход на ГСО КАСК проходит в выбранных коридорах высоты. Повышается безопасность перехода КАСК по высоте относительно номинальной ГСО. 2 з.п. ф-лы, 1 ил.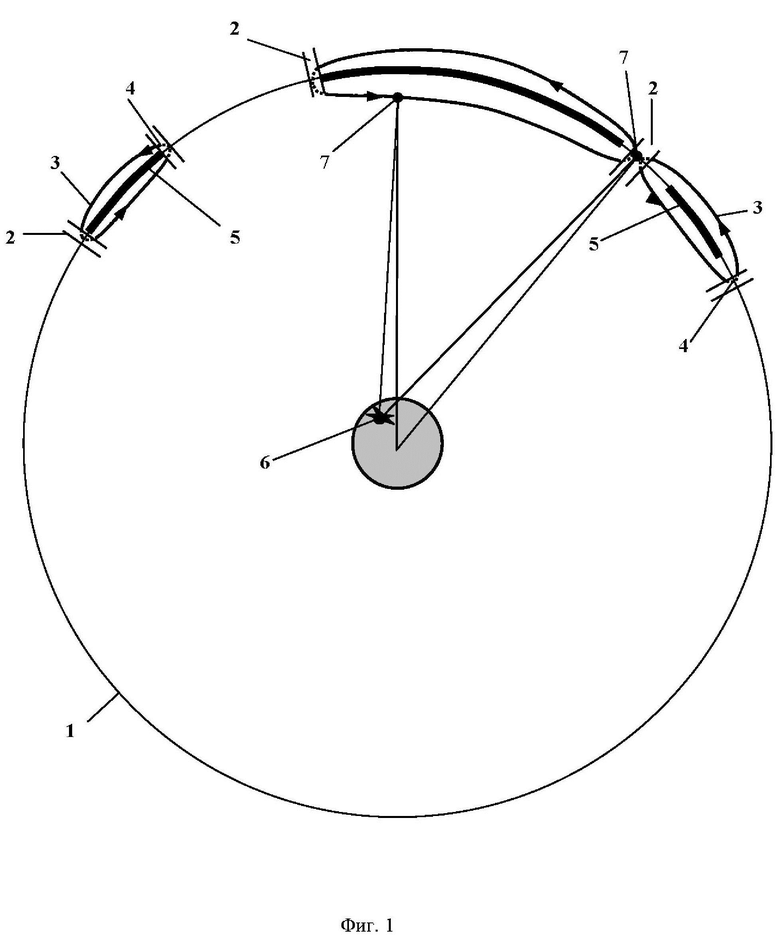
1. Способ автономной коллокации на околостационарной орбите (ОСО), включающий безопасное прохождение космического аппарата с самоколлокацией (КАСК) пограничных коридоров высоты на геостационарной орбите (ГСО), отличающийся тем, что до начала функционирования КАСК на ОСО выбирают коридоры высоты - места протяженностью по географической долготе не менее 0,2°, свободные от КА и наиболее близкие к желаемой области удержания (ОУ) по долготе; двигатели коррекции включают так, чтобы относительные траектории движения КАСК в фазовой плоскости [ΔL; Δr], где ΔL – отклонение по долготе от номинальной долготы стояния; Δr – отклонение радиуса орбиты КАСК от радиуса ГСО, представляли замкнутые траектории и располагались вне области движения в этой же плоскости других геостационарных КА, и выход на ГСО КАСК проходил в выбранных коридорах высоты.
2. Способ автономной коллокации по п. 1, отличающийся тем, что для группового движения геостационарных КА по ОСО, в отсутствие возможности их нахождения в желаемых ОУ, выбирают фазовые трассы движения, размах которых ограничен минимально допустимыми углами места для приемных и передающих антенн наземных станций связи и наличием гарантированных коридоров высоты на ГСО.
3. Способ автономной коллокации по п. 2, отличающийся тем, что коридорам высоты придают статус основных и резервных.
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721813C1 |
| EP 780297 B1, 14.11.2001 | |||
| US 4691882 A1, 08.09.1987 | |||
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2716394C1 |

