Изобретение относится к космической технике, преимущественно к космическим тросовым системам. Изобретение может быть использовано для доставки с орбитальной станции на Землю спускаемого аппарата без использования реактивной двигательной установки и затрат рабочего тела на выполнение маневров.
Под космической тросовой системой (КТС) понимается совокупность из двух космических аппаратов, соединенных длинным тонким тросом. Наличие этой механической неудерживающей связи позволяет целенаправленно перераспределять полную механическую энергию всей системы между ее концевыми элементами. При этом соединительный трос выполняет функцию проводника механической энергии. Это является физической основой для использования принципа энерго-массового обмена в орбитальных маневрах.
Среди целевых маневров КТС наиболее полно в теоретическом и экспериментальном плане проработан спуск с орбиты на Землю малого спускаемого аппарата (СА) [2, 4-12].
Перевод СА с исходной круговой орбиты на траекторию спуска после его отделения от орбитальной станции (ОС) и обмена импульсами производится за счет перераспределения полной механической энергии всей системы между ее элементами. При этом полная механическая энергия СА уменьшается до величины, необходимой для входа в атмосферу Земли и спуска, а полная механическая энергия ОС возрастает на соответствующую величину. Принцип обмена механической энергией в такой системе реализуется в соответствии с третьим законом Ньютона через реакцию натяжения троса, которая может выступать в качестве управляющего воздействия. Величина силы натяжения троса зависит от соотношения масс элементов КТС, параметров орбиты центра масс КТС и параметров относительного движения СА.
Переход СА на траекторию спуска происходит после отделения СА от ОС, развертывания троса на заданную длину с последующим переводом КТС в режим попутного маятникового движения и отрезанием троса в момент прохождения СА местной вертикали ОС. Эта схема маневра теоретически обоснована, экспериментально апробирована и на сегодняшний день считается наиболее вероятной в практической реализации.
Развертывание КТС на заданную длину троса в технологической цепочке маневра является основной задачей, техническая реализация которой может быть достигнута различными способами. Все известные способы развертывания связки двух космических объектов основаны на следующей общей схеме. В исходном состоянии два объекта, соединенных тросом, состыкованы друг с другом, а трос компактно уложен. В определенный момент времени объекты расстыковываются и одному из объектов или обоим объектам сообщают начальную скорость расхождения, например, с помощью пружинных толкателей. После этого объекты осуществляют взаимное расхождение, во время которого производится выпуск соединяющего их троса. Выпуск троса осуществляется с помощью различных устройств до момента достижения заданных терминальных условий. Если достижение заданных терминальных условий обеспечивается начальными условиями движения СА в момент разделения при свободной подаче троса, то соответствующая схема развертывания называется пассивной. Если производится управляемая подача троса, то соответствующая схема развертывания называется активной.
Таким образом, схема пассивного развертывания КТС исчерпывающе может быть описана параметрами обмена импульсами при разделении связанных объектов. Для описания схемы активного развертывания КТС дополнительно требуется определить программу обмена полной механической энергией между связанными объектами. Заметим, что интенсивность энергообмена в КТС, которая характеризуется мощностью реакции связи, напрямую зависит от параметров обмена импульсами. Следовательно, параметры обмена импульсами и параметры программы обмена полной механической энергией между связанными объектами являются ведущими проектными параметрами, поскольку определяют энергетическую эффективность маневра, принципиальную схему устройства развертывания КТС и алгоритм управления этим устройством.
Достаточно подробный анализ схем пассивного и активного развертывания КТС представлен в работах [1, 3, 4, 6, 8]. Принципиальное развитие схем развертывания КТС из монолитного состояния для решения целевых задач происходит в рамках этих двух направлений. Выделим характерные особенности этих схем.
Активное развертывание. После импульсного разделения объектов и удаления их на некоторое расстояние при свободной подаче троса наступает фаза управляемой подачи троса с устройства депонирования. Управляемое развертывание завершается программно при достижении требуемых терминальных условий либо завершение определяется условием выпуска троса с устройства депонирования на полную длину. В некоторых схемах активного развертывания может отсутствовать обмен импульсами и начальная фаза пассивного развертывания. Так было в американо-итальянских космических экспериментах на корабле "Спейс Шаттл" с привязным спутником массой 500 кг, отводимым на электропроводном тросе длиной 20 км. Выпуск троса в этих экспериментах осуществлялся с помощью лебедки, состоящей из барабана с намотанным тросом, автоматизированного электропривода и выдвижной фермы. Привязной спутник был снабжен реактивными двигателями для разгона спутника в начале его отведения.
«Классическая» схема активного развертывания КТС в задаче спуска легкой капсулы с орбиты на поверхность Земли была реализована в космическом эксперименте YES2 на КА «Фотон-М» в сентябре 2007 года: импульсное отделение СА вниз по местной вертикали с последующим развертыванием троса по двухэтапной программе с различными законами управления силой натяжения [5]. Первый этап - выведение СА на местную вертикаль ОС на удалении 3-5 км. Управление силой натяжения троса на первом этапе производится по сложному закону и практически сразу после отделения СА. Управление силой натяжения на втором этапе имеет релейный характер. Управление имеет целью развертывание КТС на заданную длину троса с обеспечением в конце участка разведения условий перехода системы в устойчивый режим попутного маятникового движения с максимально возможной амплитудой.
Пассивное развертывание. Начальная фаза развертывания - это обмен импульсами, как правило, по линии вектора орбитальной скорости. Далее выполняется неуправляемый выпуск троса в процессе расхождения объектов (фиг. 1). В соответствии с законами орбитального относительного движения длительность процесса пассивного развертывания кратна периоду обращения центра масс КТС [8, 9]. Трос обычно выпускается с помощью невращающейся ("безынерционной") катушки, которая должна обеспечивать упорядоченный выход троса с небольшим сопротивлением. Такие устройства свободной подачи троса, разработанные Carroll J.А. и протестированные в орбитальном эксперименте SEDS [13], показали уровень относительного ускорения сопротивления 
Схема пассивного развертывания КТС хорошо зарекомендовала себя в космических экспериментах: в 1966 г. с кораблями "Джемини" и ракетной ступенью "Аджена", соединенных синтетической лентой длиной 30 м; в 1981-1985 г. в четырех американо-японских экспериментах на зондирующих ракетах с полезными грузами массой 75 кг, отводимыми на электропроводных тросах длиной 400 м; в двух канадских экспериментах на зондирующих ракетах с полезными грузами массой 100 кг, отводимыми на электропроводных тросах длиной 958 м OEDIPUS-A в 1989 г. и OEDIPUS-C в 1995 г; в 1993 г. в американском эксперименте SEDS-1 на ракете "Дельта-2" с полезным грузом массой 25 кг, отводимым на полиэтиленовом тросе длиной 20 км; в 1993 г. в американском эксперименте PMG на ракете "Дельта-2" с полезным грузом, отводимым на тросе длиной 500 м.
Схема маневра спуска с орбиты на поверхность Земли СА на основе пассивного развертывания КТС [7-9] выгодно отличается от управляемого развертывания возможностью применения более простых технических устройств, несложных алгоритмов управления этими устройствами, а также обеспечивает максимальную разность энергопотенциалов связанных объектов [10].
Наиболее близким аналогом изобретения является способ доставки с орбиты на поверхность Земли малого КА, описание которого изложено в работе [7]. Способ предусматривает следующую последовательность технологических операций. Отделение СА от ОС, находящейся на околоземной круговой орбите, обеспечивается сообщением СА начальной скорости расхождения против вектора орбитальной скорости с помощью трансверсального тормозного импульса. Затем производится пассивное развертывание КТС путем свободного выпуска троса при взаимном удалении объектов. В конце этапа пассивного развертывания КТС на траектории относительного движения СА начинается кратковременный участок реверсного движения, где во избежание провисания троса необходимо производить выборку излишков длины троса со скоростью сближения СА и ОС. В конце реверсного участка при нулевой относительной скорости СА выполняется фиксация троса, что позволяет создать условия плавного перехода в режим попутного колебательного движения КТС. Пассивное маятниковое движение КТС до момента прохождения СА местной вертикали ОС завершается отделением (путем разрезания троса) и переходом СА на траекторию спуска.
Недостатком этого способа, принятого в качестве прототипа, является наличие петель на траектории пассивного развертывания - это, так называемые, реверсные участки движения СА (фиг. 2). На этих участках во избежание провисания и запутывания троса необходимо производить выборку свободного троса, чтобы обеспечить в конце реверсного участка условия безударного перевода КТС в режим попутного маятникового движения. Выполнение этой очень короткой по времени операции существенно усложняет устройство и программу развертывания КТС.
Для устранения этого существенного недостатка предлагается способ развертывания космической тросовой системы при доставке спускаемого аппарата с орбитальной станции на Землю, в котором отсутствуют участки реверсного движения, а достоинства, характерные для пассивных схем развертывания, сохраняются.
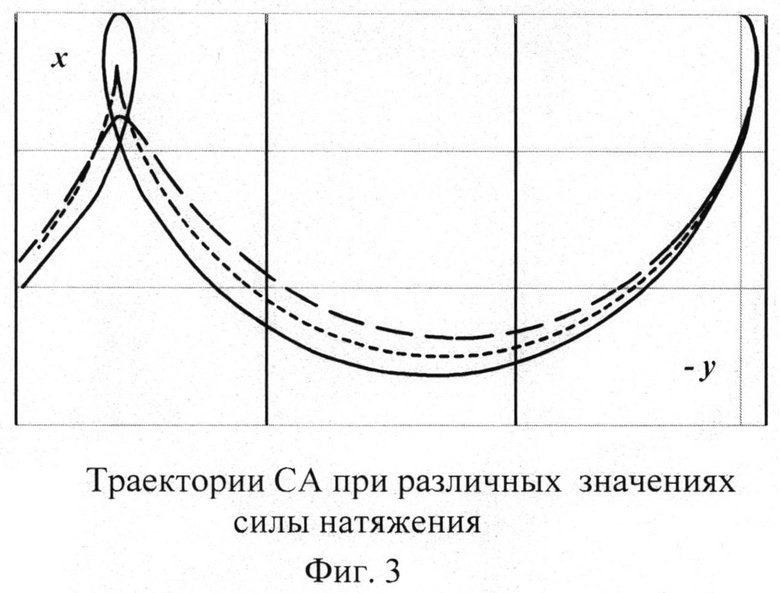
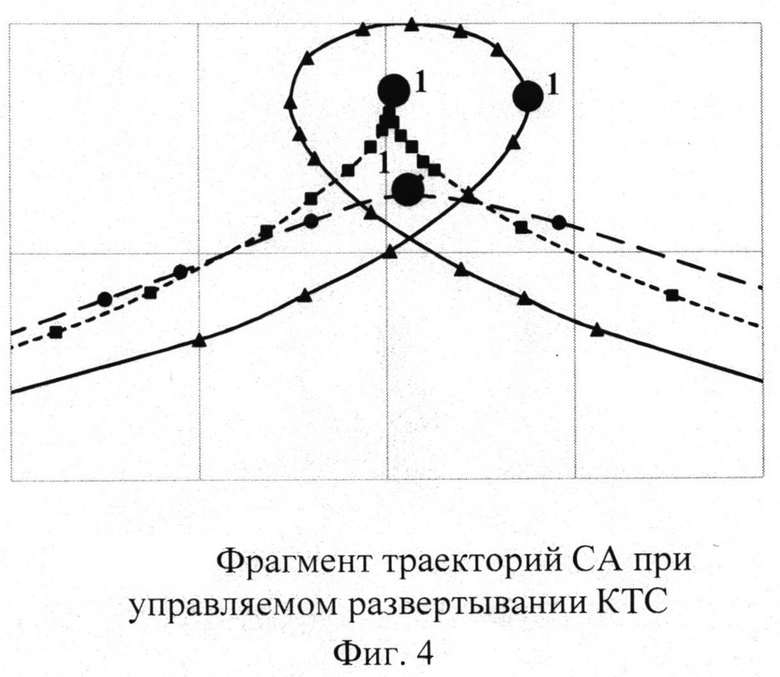
Идея предлагаемого способа основывается на том, что под действием малых возмущений (или управляющих воздействий) от силы натяжения троса на этапе пассивного развертывания КТС петли на траектории «стягиваются» (фиг. 3, 4), а время и протяженность участков возвратного движения сокращаются [8]. Идеальным условием для сопряжения траектории развертывания и траектории маятникового движения является превращение петли в точку излома под воздействием целенаправленного управления. В точке излома проекции скорости в орбитальной системе координат принимают нулевые значения, при этом проекция скорости на ось ординат меняет знак.
Реализация предлагаемого способа заключается в следующем. Отделение СА от ОС, находящейся на околоземной круговой орбите, обеспечивается сообщением СА начальной скорости расхождения против вектора орбитальной скорости с помощью трансверсального тормозного импульса. После отделения СА от ОС развертывание КТС производится с воздействием на выпускаемый трос постоянной и определенной по величине силы натяжения. Это позволяет устранить петли на траектории движения СА и полностью исключить на траектории относительного движения СА участки реверсного движения. При достижении точки излома при нулевой относительной скорости СА выполняется фиксация длины троса и плавный переход в режим попутного колебательного движения КТС. В момент прохождения СА линии местной вертикали ОС выполняется его отделение (путем разрезания троса) и переход СА на траекторию спуска.
Проведенные исследования траекторий относительного движения привязного СА с малым значением постоянно действующего ускорения натяжения (пунктирная кривая на фиг. 4), направленного вдоль линии визирования концевых объектов, показали, что относительная величина управляющего ускорения натяжения троса 



Рассмотренные безразмерные величины получены нормированием по соответствующим параметрам движения центра масс КТС. Параметры относительного движения СА в точке излома идеально подходят в качестве начальных условий для перевода КТС из режима развертывания в режим маятникового движения. Во-первых, производные от параметров положения равны нулю, что соответствует «мягкой» остановке подачи троса - безударному сопряжению траекторий. Во-вторых, вторые производные от параметров положения положительны, что соответствует условиям устойчивого перехода в режим маятникового движения из максимальной угловой фазы. Эти условия исключают эффект «зависания» орбитального маятника в точке возврата.
Заметим, что относительная величина управляемого ускорения натяжения, при котором петля на траектории относительного движения превращается в точку излома, очень мала. Ее максимальное значение 
Исследование траекторий относительного движения СА при «больших» возмущениях k>k* показывает, что траектории становятся гладкими (пунктирная кривая на фиг. 4). На таких траекториях не выполняются условия безударного перевода КТС из режима развертывания в режим маятникового движения. Минимальное значение относительной скорости 


ЛИТЕРАТУРА 1. Динамика космических систем с тросовыми и шарнирными соединениями / А.П. Алпатов, В.В. Белецкий, В.И. Драновский, А.Е. Закржевский, А.В. Пироженко, Г. Трогер, B.C. Хорошилов. - Москва-Ижевск: НИЦ «Регулярная и хаотическая динамика», Институт компьютерных исследований, 2007. - 560 с.
2. Асланов B.C., Ледков А.С., Стратилатов Н.Р. Пространственное движение космической тросовой системы, предназначенной для доставки груза на Землю // Полет. - 2007. - №2. - С. 28-33.
3. Белецкий В.В., Левин Е.М. Динамика космических тросовых систем. - М.: Наука, 1990. - 336 с. (Механика космического полета).
4. Иванов В.А., Ситарский Ю.С. Динамика полета системы гибко связанных космических объектов. - М.: Машиностроение, 1986. - 248 с.
5. Ишков С.А., Наумов С.А. Управление развертыванием орбитальной тросовой системы // Вестник Самарского государственного аэрокосмического университета имени С.П. Королева. - Самара, 2006. - Вып. 1(9). - С. 77-85.
6. Патент Российской Федерации. Способ развертывания орбитальной тросовой системы / В.Г. Осипов, Н.Л. Шошунов, В.И. Кочергин. - №2112714, 1998 г.
7. Патент Российской Федерации. Способ доставки с орбитальной станции на Землю спускаемого аппарата на основе использования пассивного развертывания космической тросовой системы / В.И. Щербаков, А.П. Софьин. - №2497729, 2013 г.
8. Щербаков В.И. Спуск с орбиты малого КА с помощью космической тросовой системы. - LAP LAMBERT Academic Publishing, Saarbrucken, Germany - 2012. - 232 c., ISBN 978-3-659-30778-2.
9. Щербаков В.И. Орбитальные маневры космической тросовой системы: монография. - СПб.: ВКА им. А.Ф. Можайского, 2010. - 185 с.
10. Щербаков В.И., Слезкинский С.К., Софьин А.П., Степаненков О.С. Развертывание космической тросовой системы с максимальной интенсивностью обмена орбитальной энергией // Международная конференция «Восьмые Окуневские чтения». 25-28 июня 2013 г., СПб: Материалы докладов / Балт. гос. техн. ун-т. - СПб., 2013. - С. 333-335.
11. Zimmermann F., Schottle U.M., Messerschmid Е. Optimization of the tetherassisted return mission of a guided re-entry capsule. AST 9, (2005), 713-721.
12. Eades J.B.J. A control system for orbiting tethered-body operations // Proceedings IFAC 6-th World Congress. - Boston-Cambriedge. - 1975. - Part. 4. - Pittsburgh. - 1975, 14.2/1-14.2/6.
13. Carroll J.A. SEDS deplorer design and flight performance. // AIAA Paper. №93-4764, 1993.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДОСТАВКИ С ОРБИТАЛЬНОЙ СТАНЦИИ НА ЗЕМЛЮ СПУСКАЕМОГО АППАРАТА НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ПАССИВНОГО РАЗВЕРТЫВАНИЯ КОСМИЧЕСКОЙ ТРОСОВОЙ СИСТЕМЫ | 2011 |
|
RU2497729C2 |
| СПОСОБ ВЫПОЛНЕНИЯ МАНЕВРА УКЛОНЕНИЯ КОСМИЧЕСКОГО АППАРАТА ОТ СТОЛКНОВЕНИЯ НА ОРБИТЕ С ДРУГИМИ ТЕЛАМИ | 2015 |
|
RU2586920C1 |
| СПОСОБ РАЗВЕРТЫВАНИЯ И ЗАКРУТКИ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС КОСМИЧЕСКОЙ ТРОСОВОЙ СИСТЕМЫ С ПОМОЩЬЮ ГРАВИТАЦИОННЫХ И ВНУТРЕННИХ СИЛ | 2012 |
|
RU2536611C2 |
| СПОСОБ РАЗВЕРТЫВАНИЯ ОРБИТАЛЬНОЙ ТРОСОВОЙ СИСТЕМЫ | 1996 |
|
RU2112715C1 |
| СПОСОБ РАЗВЕРТЫВАНИЯ ОРБИТАЛЬНОЙ ТРОСОВОЙ СИСТЕМЫ | 1996 |
|
RU2112714C1 |
| УСТРОЙСТВО РАЗРУШЕНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫХ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2018 |
|
RU2688111C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2012 |
|
RU2493530C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ВЕРХНЕЙ АТМОСФЕРЫ | 2016 |
|
RU2655645C1 |
| СПОСОБ УВОДА КОСМИЧЕСКОГО МУСОРА С ОРБИТ ПОЛЕЗНЫХ НАГРУЗОК НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ОТДЕЛИВШЕЙСЯ ЧАСТИ РАКЕТЫ-НОСИТЕЛЯ, РАЗГОННОГО БЛОКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2462399C2 |
| Космическая инфраструктура для обслуживания космических объектов на геостационарной и более низких орбитах, а также способ обслуживания космических объектов посредством данной инфраструктуры | 2022 |
|
RU2776887C1 |
Изобретение относится к управлению движением связанных тросом космических объектов. Способ включает расстыковку указанных объектов с сообщением спускаемому аппарату (СА) начальной скорости расхождения против вектора орбитальной скорости. Затем выпускают трос с постоянной силой натяжения при удалении СА и безударно переводят связку в режим попутного маятникового движения, фиксируя длину троса. Трос отрезают в момент прохождения СА местной вертикали орбитальной станции. Величина ускорения указанной силы натяжения троса при удалении СА от орбитальной станции  , где
, где  - величина трансверсального импульса скорости расталкивания. Данные величины отнесены к соответствующим параметрам стартовой круговой орбиты. Технический результат изобретения состоит в исключении участков возвратного движения СА с тросом, чем достигается упрощение управления маневром спуска. 4 ил.
- величина трансверсального импульса скорости расталкивания. Данные величины отнесены к соответствующим параметрам стартовой круговой орбиты. Технический результат изобретения состоит в исключении участков возвратного движения СА с тросом, чем достигается упрощение управления маневром спуска. 4 ил.
Способ развертывания космической тросовой системы при доставке спускаемого аппарата с орбитальной станции на Землю, включающий расстыковку двух соединенных тросом объектов, сообщение спускаемому аппарату начальной скорости расхождения против вектора орбитальной скорости, выпуск троса при удалении спускаемого аппарата, фиксацию длины троса, попутное маятниковое движение и отрезание троса в момент прохождения спускаемым аппаратом линии местной вертикали орбитальной станции, отличающийся тем, что подачу троса при удалении спускаемого аппарата от орбитальной станции производят с постоянным по величине натяжением 


| СПОСОБ ДОСТАВКИ С ОРБИТАЛЬНОЙ СТАНЦИИ НА ЗЕМЛЮ СПУСКАЕМОГО АППАРАТА НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ПАССИВНОГО РАЗВЕРТЫВАНИЯ КОСМИЧЕСКОЙ ТРОСОВОЙ СИСТЕМЫ | 2011 |
|
RU2497729C2 |
| Устройство для предохранения от обрыва вожака дрифтерных сетей | 1960 |
|
SU137337A1 |
| Устройство для управления приводом судовой лебедки | 1984 |
|
SU1235818A1 |
| СПОСОБ РАЗВЕРТЫВАНИЯ ОРБИТАЛЬНОЙ ТРОСОВОЙ СИСТЕМЫ | 1996 |
|
RU2112715C1 |
| US 7503526 B1, 17.03.2009 | |||
| US 6913224 B2, 05.07.2005 | |||
| US 20100193640 A1, 05.08.2010. | |||

