Данное изобретение относится к рычажному механизму c присоединенным к нему узлом привода для доильной установки автоматического доения дойных животных по ограничительной части п. 1 формулы изобретения. Кроме того, изобретение относится к перегородке доильной установки и доильной установке.
Такой рычажный механизм для доильной установки применяют для машинного или автоматического доения дойных животных. В общем, такую установку также называют автоматической доильной установкой. Дойными животными, например, являются коровы, козы, овцы и т.д. Доильная установка содержит доильные станки, разделенные перегородками. Процесс дойки может быть автоматизирован при помощи автоматических доильных установок. Например, применяют доильные карусели.
Термин доильная установка обозначает установку, состоящую из доильных станков, причем угловое положение доимого животного или угловое положение воображаемой продольной оси доимого животного в доильном станке относительно начала отсчета или базовой линии составляет от 0 до 90°. В качестве начала отсчета, например, применяют траншею или доступный для персонала участок (например, проход), являющийся местом пребывания персонала молочной фермы. В качестве базовой линии, например, применяют продольную сторону прямолинейной траншеи или касательную к круговой траншее.
Доильные установки представляют собой, например, подвижные и стационарные доильные установки. Подвижными доильными установками, например, являются доильные карусели с доением снаружи или изнутри, причем в обоих случаях вращение возможно в любую сторону. Так называемые доильные установки с параллельным расположением станков могут быть выполнены также в виде подвижных доильных установок. Кроме того, групповые доильные установки также могут быть стационарными, например, типа "елочка" или "тандем". Это перечисление дано только в качестве примера, ограничительным оно не является.
В патентном документе WO 2013/135842 A1 описывается перегородка доильной установки для по меньшей мере одного доильного станка доения дойных животных. В отношении рычажных механизмов упоминаются разные решения.
Сами по себе предлагаемые решения проверены временем. Однако все более повышающиеся требования, в особенности, в отношении высоких показателей производительности и непрерывной эксплуатации, требуют, чтобы современные автоматические доильные установки, которые являются сложными и дорогими, могли применяться совместно на нескольких доильных площадках. Это может иметь отрицательные последствия, в том числе из-за большой сложности и связанной с ней высокой вероятностью отказа, периодического режима работы, недоступных для персонала участков (техника безопасности на роботизированных участках). На затратах особенно сказываются повышенные требования к повторяемости и точности.
На этом фоне задача данного изобретения состоит в том, чтобы создать усовершенствованный рычажный механизм для доильного станка и увеличить возможную производительность установки.
Эта задача решается благодаря рычажному механизму с признаками пункта 1 формулы изобретения. Задача решается также благодаря перегородке с признаками пункта 13 и доильной установке с признаками пункта 17.
Предлагаемый рычажный механизм c присоединенным к нему узлом привода для доильной установки автоматического доения дойных животных содержит рычаг и держатель, соединенный с ним с возможностью поворота и имеющий доильный аппарат, причем рычаг соединен с валом привода рычага и установлен с возможностью поворота вокруг оси рычага, причем в вале привода рычага установлен вал привода держателя с обеспечением возможности его поворота независимо от вала привода рычага, причем вал привода рычага и вал привода держателя соединены с узлом привода, при этом рычажный механизм имеет по меньшей мере один передаточный элемент в качестве средства тяги для передачи вращательных или поворотных движений. Узел привода имеет привод рычага для поворота рычага, привод держателя для поворота держателя и вертикальный привод для перемещения рычажного механизма в вертикальном направлении, причем привод рычага, привод держателя и вертикальный привод установлены в раме, выполненной с возможностью перемещения в вертикальном направлении.
Таким образом, относительно тяжелые двигатели и/или передачи расположены не на/в рычаге или на/в держателе или соответствующих передачах 12b, 11a, а установлены в раме. Отсюда следует, что вес рычага и держателя существенно уменьшен по сравнению с рычажными механизмами, содержащими интегрированные двигатели и передачи.
Предпочтительно привод рычага, привод держателя и вертикальный привод узла привода, включая соответствующие передачи и подшипниковый узел вала привода рычага и вала привода держателя, образуют общую основу рычажного механизма в раме. Другими словами, при эксплуатации рычаг и держатель передают предпочтительно лишь незначительную кинетическую энергию в плоскостях x-y (в направлении z происходят только медленные движения с пониженной точностью).
В дополнительном варианте осуществления вертикальный привод выполнен с возможностью перемещения рамы в вертикальном направлении, что обеспечивает компактность конструкции.
Таким образом, при помощи вертикальных направляющих опор на обеих продольных сторонах рама, выполненная с возможностью перемещения в вертикальном направлении, может направляться в вертикальном направлении на соответствующем вертикальном направляющем элементе на перегородке соответствующей доильной установки.
В дополнительном варианте предусмотрено, что привод рычага и привод держателя закреплены рядом друг с другом на несущем элементе в раме, причем привод держателя установлен на первом подшипнике подшипникового узла, при этом второй подшипник подшипникового узла установлен ниже на еще одном несущем элементе рамы, что обеспечивает предпочтительную малогабаритную конструкцию.
Для обеспечения простой конструкции и уменьшенных габаритов предпочтительно, чтобы в дополнительном варианте осуществления вал привода рычага был установлен в первом подшипнике и втором подшипнике подшипникового узла с возможностью поворота вокруг вертикального направления и проходил в вертикальном направлении.
В еще одном варианте осуществления предусмотрено, что под верхним несущим элементом вал привода рычага соединен, при помощи передаточного элемента, с выходом привода рычага, причем нижний конец вала привода рычага соединен с концом рычага. Таким образом, преимущество заключается в том, конструкция становится меньше.
В еще одном варианте осуществления предусмотрено предпочтительное простое средство регулировки напряжения передаточного элемента, причем привод рычага выполнен с возможностью регулировки в продольном направлении несущего элемента при помощи натяжного устройства для натяжения передаточного элемента.
В еще одном варианте осуществления предусмотрено, что внутри вала привода рычага, выполненного в виде полого вала, вал привода держателя расположен концентрически относительно вала привода с возможностью вращения вокруг вертикального направления вокруг оси рычага, причем вал привода выполнен с возможностью вращения независимо от вала привода рычага, и над первым подшипником вал привода держателя соединен с выходом привода держателя. Этим обеспечивается предпочтительная компактная и тонкая конструкция.
По меньшей мере один передаточный элемент жестко соединен с колесами, с которыми он взаимодействует для передачи вращательных или поворотных движений.
При помощи этого передаточного элемента предпочтительным образом возможна передача без зазора поворотных движений между приводным колесом и выходным колесом. Так как возникают только поворотные движения (максимально до 180°), возможно крепление передаточного элемента к соответствующему колесу.
В одном варианте осуществления по меньшей мере один передаточный элемент образован из металлической ленты.
По сравнению со средствами тяги, применяемыми в соответствии с уровнем техники, передаточный элемент из металлической ленты имеет особые преимущества, например, почти постоянное ускорение и скорость в процессе вращений и поворотов. Таким образом, полигональные эффекты, типичные для цепей, не возникают. Кроме того, не возникает пластическая деформация и другие проблемы, связанные с применением ремней, зубчатых ремней и т.д.
В одном варианте осуществления по меньшей мере один передаточный элемент представляет собой пружинную стальную ленту. Это может быть, например, лента из нержавеющей стали, причем она может быть изготовлена из материала 1.410. Кроме того, эта специальная сталь коррозионно-устойчива, поэтому ее предпочтительно применять как раз в области, расположенной под животными.
Кроме того, стоимость изготовления такого передаточного элемента невелика, и возможна передача больших усилий.
Кроме того, металлический материал передаточного элемента может быть подвергнут последующей обработке, причем, например, "отпуск" может предпочтительным образом повысить износостойкость передаточного элемента.
Предусмотрено, что узел привода, соотносимый с рычажным механизмом, имеет привод рычага для привода рычага, привод держателя для привода держателя и вертикальный привод для вертикального перемещения рычажного механизма, причем привод рычага и привод держателя установлены в одной раме. Так как двигатели расположены не в шарнирах, двигатели не находятся в грязной и влажной зоне, таким образом, они могут иметь более низкий класс защиты. Кроме того, двигатели, установленные в шарнирах, увеличивают движущиеся массы, что означает пониженную регулируемость, которая здесь, однако, более не существует.
При этом может быть предусмотрено натяжное устройство для натяжения по меньшей мере одного передаточного элемента путем смещения привода рычага. Конечно, вместо натяжного устройства или дополнительно для предварительного натяжения также может применяться прижимной ролик (или несколько прижимных роликов).
В еще одном варианте осуществления привод рычага, привод держателя и вертикальный привод узла привода, включая соответствующие передачи и подшипниковый узел вала привода рычага и вала привода держателя, образуют общую основу рычажного механизма в раме. Этим обеспечивается особое преимущество, заключающееся в том, что вес рычага и держателя по сравнению с рычажными механизмами, содержащими интегрированные двигатели и передачи, существенно уменьшен. При эксплуатации рычаг и держатель передают лишь предпочтительно незначительную кинетическую энергию в плоскостях x-y (в направлении z происходят только медленные движения с пониженной точностью). Этим, в свою очередь обеспечивается преимущество, состоящее в том, что, что дояр и автоматический рычажный механизм с доильным аппаратом в процессе дойки (позиционирование, установка, дойка, возможная повторная установка, снятие) могут одновременно работать с доимым животным. Таким образом, не требуется специальной защищенной зоны. Кроме того, одно из преимуществ состоит в том, что упрощается управление рычажным механизмом в плоскостях x-y, так как благодаря пониженной инерционности рычажный механизм обладает значительно меньшей задержкой по времени и требует меньших ускоряющих сил.
В еще одном варианте осуществления рычаг и держатель рычажного механизма могут поворачиваться независимо друг от друга. Благодаря этому обеспечивается простая регулируемость положений рычага и держателя.
В соответствии с изобретением предлагается перегородка доильной установки для по меньшей мере одного доильного станка доения дойных животных, причем эта перегородка расположена на продольной стороне доильного станка. Перегородка имеет узел привода и соединенный с ним рычажный механизм, который содержит рычаг и держатель, соединенный с рычагом с возможностью поворота и имеющий доильный аппарат, и может перемещаться из исходного положения в рабочее положение и обратно, причем в исходном положении рычажный механизм с доильным аппаратом расположен в перегородке и может перемещаться в боковом направлении к доимому животному, в рабочее положение между его передними и задними ногами. Рычажный механизм представляет собой вышеописанный рычажный механизм c присоединенным к нему узлом привода.
В предпочтительном варианте осуществления узел привода с приводом рычага, приводом держателя и вертикальным приводом, включая соответствующие передачи и подшипниковый узел вала привода рычага и вала привода держателя, образуют общую основу рычажного механизма в раме расположены в средней части перегородки. Таким образом, рама при помощи вертикальных направляющих опор на ее обеих продольных сторонах направлена с возможностью перемещения в вертикальном направлении на соответствующем вертикальном направляющем элементе и расположена в средней части перегородки. Этим обеспечивается предпочтительная компактная конструкция.
В доильной установке с расположенными рядом друг с другом прямоугольными доильными станками, каждый из которых имеет параллельные продольные стороны, как это имеет место, например, в доильной установке с параллельным расположением станков, перегородка расположена параллельно воображаемой продольной оси доимого животного. При этом для упрощения предполагается, что в идеальном состоянии доимое животное стоит неподвижно со своей воображаемой продольной осью во время доения.
В случае доильной установки с расположенными по кругу станками, например, в доильной карусели, продольные стороны доильных станков не параллельны. В этом случае продольные стороны представляют собой отрезки радиусов круга доильной карусели и пересекаются в воображаемом продолжении в центре этого круга или в точке поворота карусели, причем они образуют центральный угол. Воображаемая продольная ось доимого животного в идеальном случае проходит также через точку поворота и делит этот центральный угол пополам. Ниже этот случай для краткости обозначается как "приблизительно параллельно".
Доимое животное может войти в оборудованный перегородкой доильный станок, не соприкасаясь с рычажным механизмом. Только в том случае, если животное уже стоит в доильном станке, доильный аппарат перемещается сбоку в рабочее положение, под животное. Для этого может оказаться необходимым, чтобы при смене животного вся перегородка перемещалась из исходного положения в положение доения, идеальное для нового животного, например, в продольном направлении перегородки. Перегородка устроена так, что возникает потребности в дополнительной площади не. Благодаря этому получается преимущество, заключающееся в том, что животные могут по-прежнему стоять брюхо к брюху. Это обеспечивает дополнительные преимущества. Во-первых, таким образом на минимально возможной площади можно доить большое количество животных, в результате затраты на доильную установку и соответствующее здание можно сохранить на низком уровне. Во-вторых, сокращаются расстояния, проходимые персоналом молочной фермы и животными и, т.е. экономится время.
Еще одно преимущество этой компактной конструкции состоит в том, что оснащение существующих установок перегородкой возможно без потерь доильных станков/площадок.
Персонал может в любой момент и без труда вмешаться в процесс дойки, при этом ему не мешают соответствующие устройства, т.е. рычажный механизм и вспомогательное оборудование. Дополнительные защитные приспособления не требуются. Если доильная установка представляет собой доильную карусель, то она может продолжать вращаться беспрерывно, так как персонал молочной фермы может осуществить вмешательство снаружи в любом месте. Опасность для персонала существенно снижается.
В одном из вариантов осуществления, в полностью автоматическом режиме, рычажный механизм может перемещаться из исходного положения в рабочем положении в положение установки для автоматической установки доильного аппарата на соски доимого животного, причем доильный аппарат имеет по меньшей мере один датчик положения. При этом рычажный механизм перемещает доильный аппарат под вымя доимого животного, а доильные стаканы автоматически устанавливаются на соски при помощи датчика положения для обнаружения сосков, рычажного механизма и узла привода. Этот режим также обозначается, как автоматический режим.
При этом каждый доильный стакан может позиционироваться отдельно.
Альтернативно в другом варианте осуществления предусмотрено, что в полуавтоматическом режиме, рычажный механизм может перемещаться из исходного положения в рабочее положение, причем рабочее положение представляет собой фиксированное предварительное положение, предварительно задаваемое упорами, причем в предварительном положении доильный аппарат находится в удобном для дояра положении. При этом доильный аппарат при помощи простых средств привода, имеющих регулируемые упоры, например, при помощи пневмоцилиндров, перемещается в удобное для персонала молочной фермы, фиксированное предварительное положение, под вымя доимого животного. После этого дояр, стоящий позади животного, может просто, без затруднений взять в руки доильные стаканы и установить их на соски. Сразу после установки на сосок первого стакана это распознается, например, при помощи пневматического датчика давления, и доильный аппарат деблокируется из фиксированного предварительного положения в свободное горизонтальное положение. Что касается вертикального положения, доильный аппарат, как при автоматической установке, остается в положении висения. Таким образом, обеспечивается, что, как при автоматической установке, после установки доильный аппарат следует за движениями доимого животного.
Это предварительное позиционирование доильного аппарата при помощи рычажного механизма во время этого так называемого полуавтоматического доения происходит так, что дояру требуется лишь немного переместить доильные стаканы, чтобы установить их на соски, при этом ему почти не приходится затрачивать никаких усилий. Это обеспечивает экономию усилий и времени. Так как в этом варианте осуществления не требуется ни датчик положения, ни приводной механизм для управления всеми положениями сосков, а необходим только простой привод, этот вариант предпочтительным образом может потребовать меньших затрат. Еще одно преимущество заключается в том, что этот полуавтоматический вариант может быть модернизирован до автоматического варианта. Это возможно, так как в обоих вариантах применяют много одинаковых компонентов.
Вышеописанной перегородкой может быть оборудована доильная установка доения дойных животных.
Доильная установка может представлять собой доильную карусель. Доильная карусель может быть выполнена в виде доильной карусели с доением снаружи.
Доильная установка может быть выполнена как доильная установка с параллельным расположением станков или доильная установка "елочка" с острым или прямым углом между доильными станками и траншеей. При этом в одном из вариантов осуществления по меньшей мере одна из нескольких перегородок может перемещаться в своем продольном направлении из положения доения в положение подхода и снова назад, причем один конец по меньшей мере одной перегородки, обращенный в направлении ограждения траншеи для дояра, в положении доения расположен ближе к ограждению траншеи, чем в положении подхода, причем в положении подхода между этим концом и ограждением траншеи образован промежуток для подхода доимых животных в направлении подхода. Благодаря этому доимые животные могут занять один за другим все доильные станки, которые не остаются незанятыми. Промежуток для подхода предотвращает прикосновение животных к ограждению траншеи или к концам.
В альтернативном варианте осуществления доильной установки с параллельным расположением станков или доильной установки "елочка" с острым или прямым углом между доильными станками и траншеей несколько перегородок могут перемещаться в своем продольном направлении из положения доения в положение подхода и снова назад, причем концы этих нескольких перегородок, обращенные в направлении ограждения траншеи для дояра, в положении доения расположены ближе к ограждению траншеи, чем в положении подхода, причем в положении подхода между этими концами и ограждением траншеи образован промежуток для подхода доимых животных в направлении подхода.
В еще одном варианте осуществления предусмотрено, что несколько перегородок могут перемещаться в своем продольном направлении из положения доения в положение подхода и снова назад отдельно, группами или сразу все перегородки. В результате возможно простое и эффективное управление движением животных.
В другом варианте осуществления перегородки выполнены так, что в положении подхода они деблокируют только часть соответствующего доильного станка для доимого животного, пока в станки доильной установки не войдут все доимые животные, а затем деблокируют соответствующий станок полностью. При этом можно без труда влиять на движение животных.
В этом случае, если доильная установка имеет систему определения прохождения доимых животных, расположенную в перегородках, также возможно определение прохождения. Таким образом, можно не только управлять движением животных, но и контролировать его простым образом.
Таким образом, предлагаемый рычажный механизм, также вместе с предлагаемой перегородкой и предлагаемым доильным станком, обеспечивает следующие преимущества:
- весьма небольшие допуски, даже после длительного срока службы;
- отсутствует упругость элементов, в особенности, если корова движется с установленными доильными стаканами;
- в плоскостях x-y рычажный механизм передает лишь незначительную кинетическую энергию, так как тяжелые двигатели и/или передачи не установлены в шарнире рычага и шарнире держателя;
- благодаря незначительной кинетической энергии человек/дояр и робот в процессе доения могут одновременно работать у доимого животного (у коровы). Защищенная зона не требуется;
- почти отсутствует пластическая деформация средств тяги/передаточных элементов (это особенно важно для легкости хода, ручной установки доильных стаканов, отслеживания движущегося животного), причем под пластической деформацией следует понимать деформацию средства передачи, например, вследствие таких механических воздействий, как сминание, сжатие, растягивание;
- нечувствительность к колебаниям температуры;
- лишь незначительные дополнительные движущиеся массы в центральной точке инструмента (TCP) (в частности при применении направляющих роликов из пластмассы), в результате обеспечивается лучшая и более быстрая регулируемость;
- пружинная стальная лента не является быстроизнашиваемой частью;
- отсутствует полигональный эффект (как в случае шатунов, цепей, зубчатых ремней), в результате обеспечивается более простая регулируемость;
- не требуются большие силы предварительного натяжения, в результате на опорных точках образуются меньшие силы;
- экономия в весе за счет применения пластика в качестве материала для многих элементов (колес и роликов);
- почти полное отсутствие зазора, вследствие этого - простая позиционируемость доильного аппарата в обратном направлении при съеме/отрыве/падении;
- пониженная опасность травмирования доимых животных.
Предпочтительные усовершенствованные варианты осуществления доильного аппарата и доильного станка являются предметом соответствующих зависимых пунктов формулы изобретения.
Дополнительные преимущества и детали следуют из примера варианта осуществления, показанного на чертежах. На чертежах показано следующее.
Фиг. 1 представляет собой схематичный вид сверху примера осуществления предлагаемой доильной установки, содержащей предлагаемые перегородки с предлагаемыми рычажными механизмами.
Фиг. 1a представляет собой схематичный вид сверху доильных станков, выполненных согласно фиг. 1.
Фиг. 2-2a представляет собой схематичные изображения второго примера осуществления предлагаемой доильной установки, содержащей предлагаемые перегородки.
Фиг. 2b представляет собой схематичный вид сверху варианта второго примера осуществления, выполненного согласно фиг. 2, 2a.
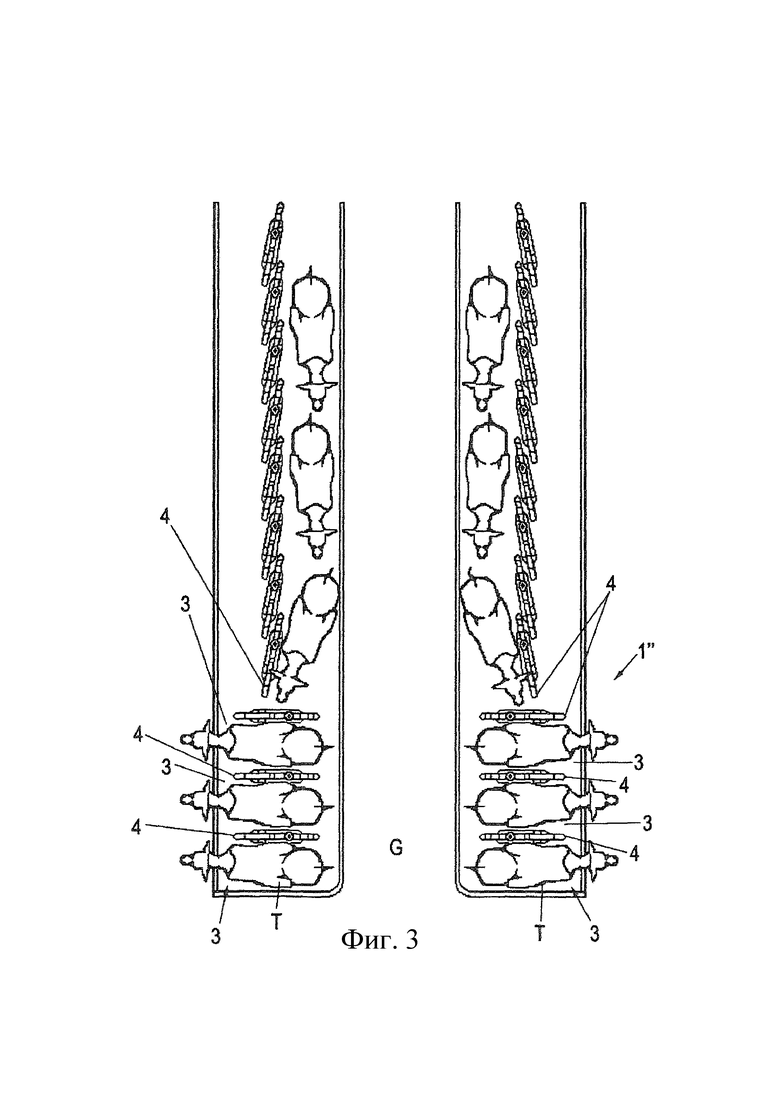
Фиг. 3 представляет собой схематичный вид сверху третьего варианта осуществления предлагаемой доильной установки, содержащей предлагаемые перегородки.
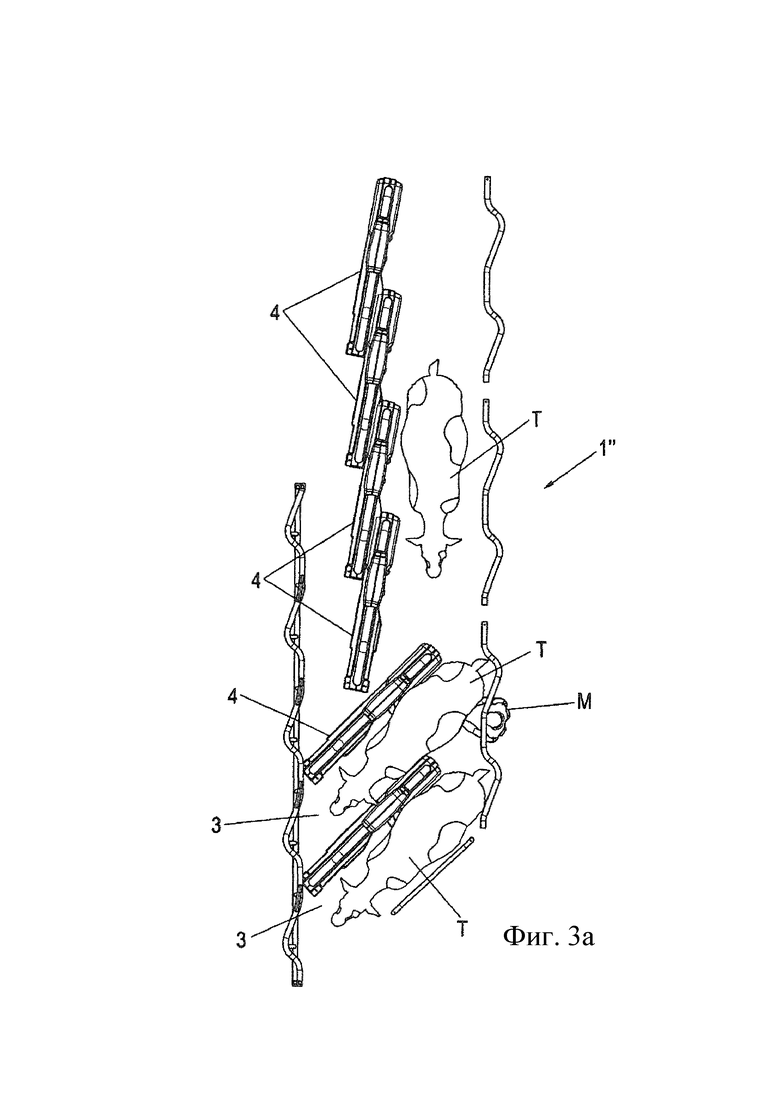
Фиг. 3a представляет собой схематичный вид сверху варианта третьего примера осуществления, выполненного согласно фиг. 3.
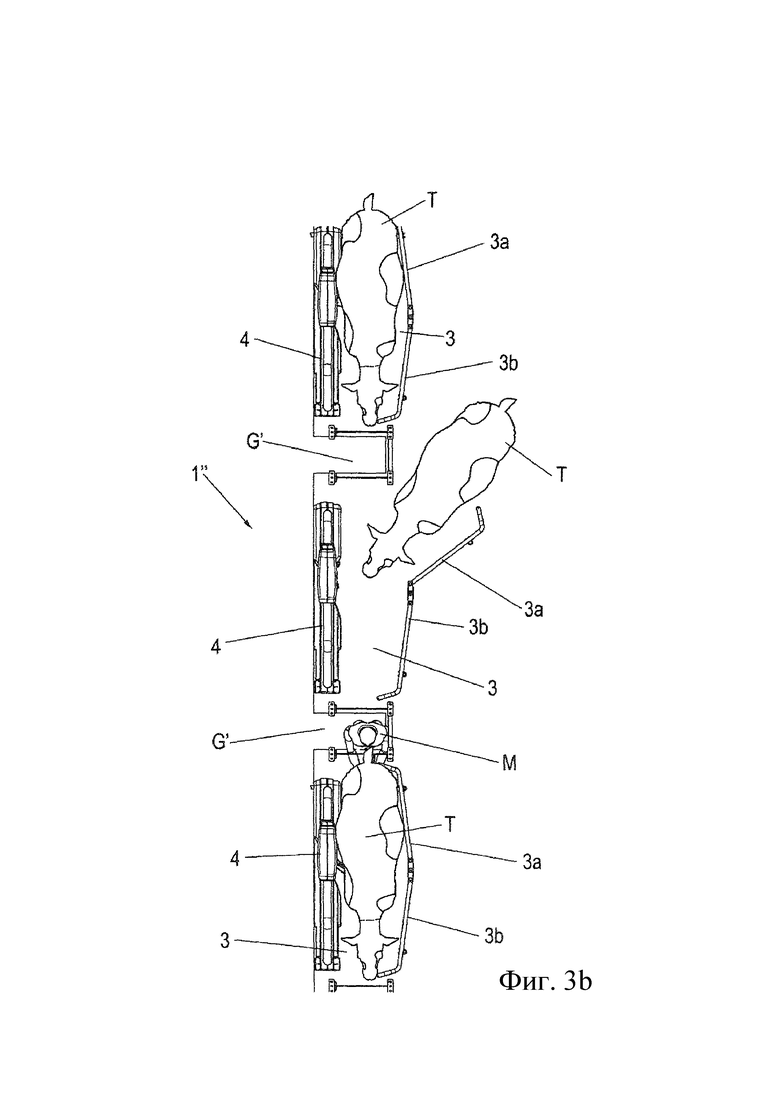
Фиг. 3b представляет собой схематичный вид сверху еще одного варианта третьего примера осуществления, выполненного согласно фиг. 3.
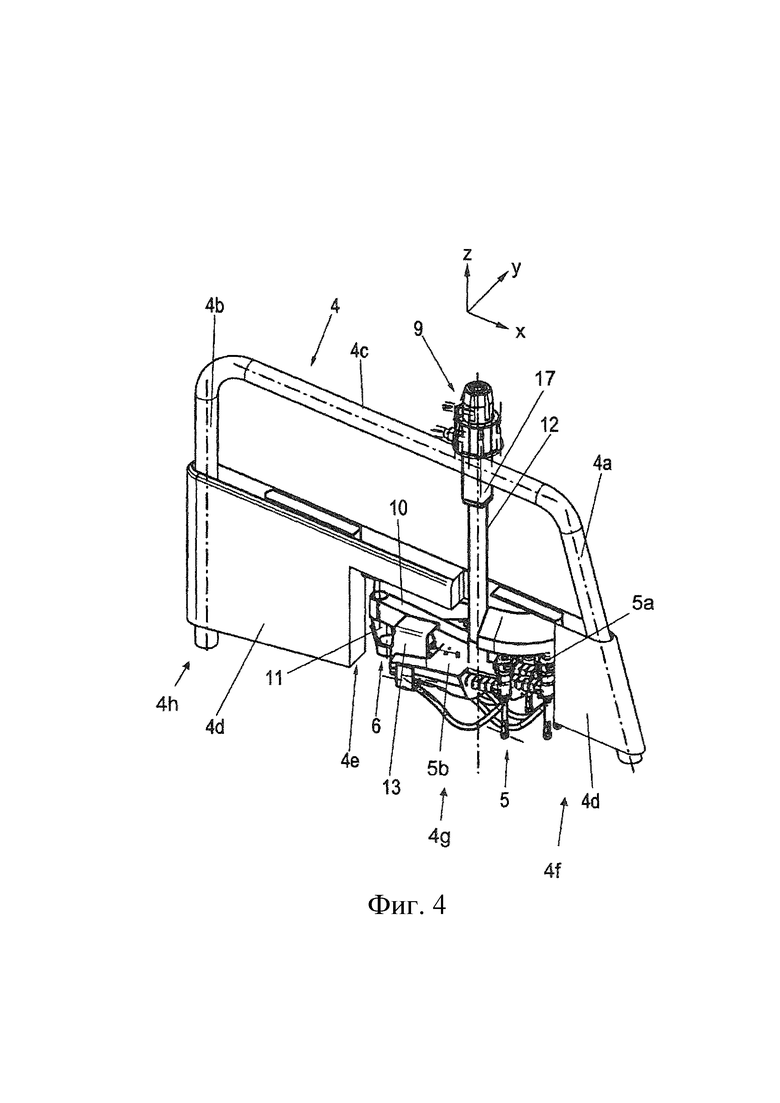
Фиг. 4 представляет собой схематичное аксонометрическое изображение предлагаемой перегородки с предлагаемым рычажным механизмом в исходном положении.
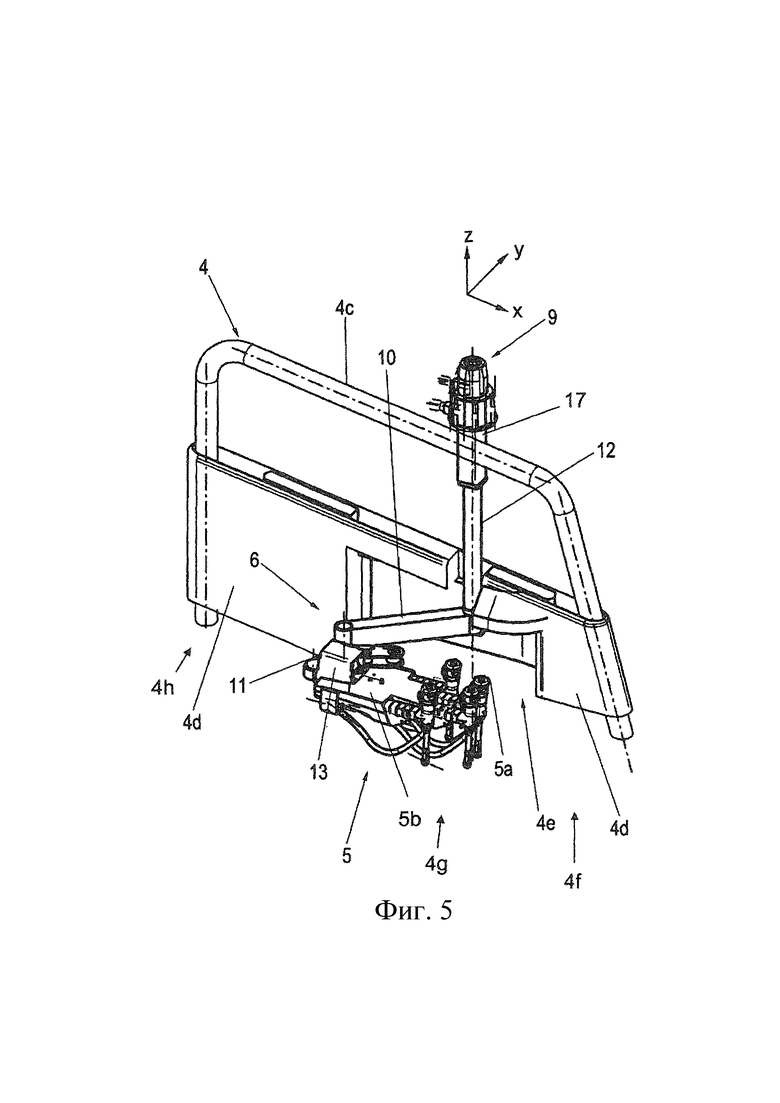
Фиг. 5 представляет собой аксонометрическое изображение, соответствующее фиг. 4, с предлагаемым рычажным механизмом в рабочем положении.
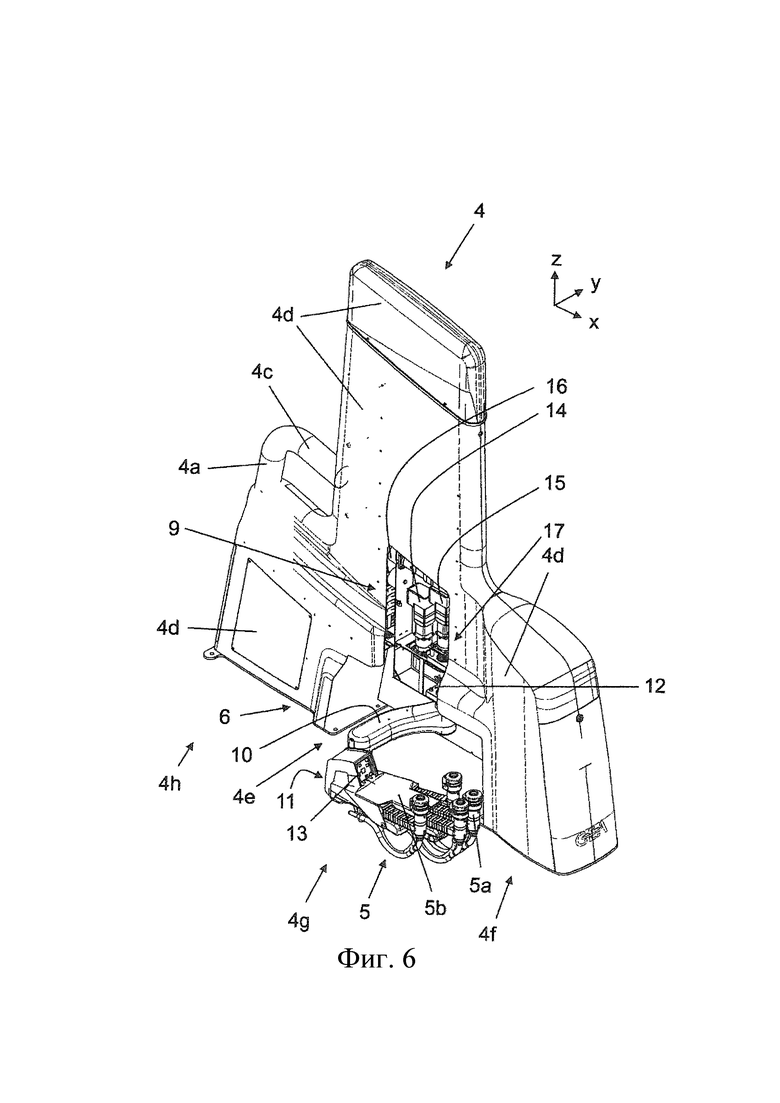
Фиг. 6 представляет собой аксонометрическое изображение варианта предлагаемой перегородки с предлагаемым рычажным механизмом в рабочем положении.
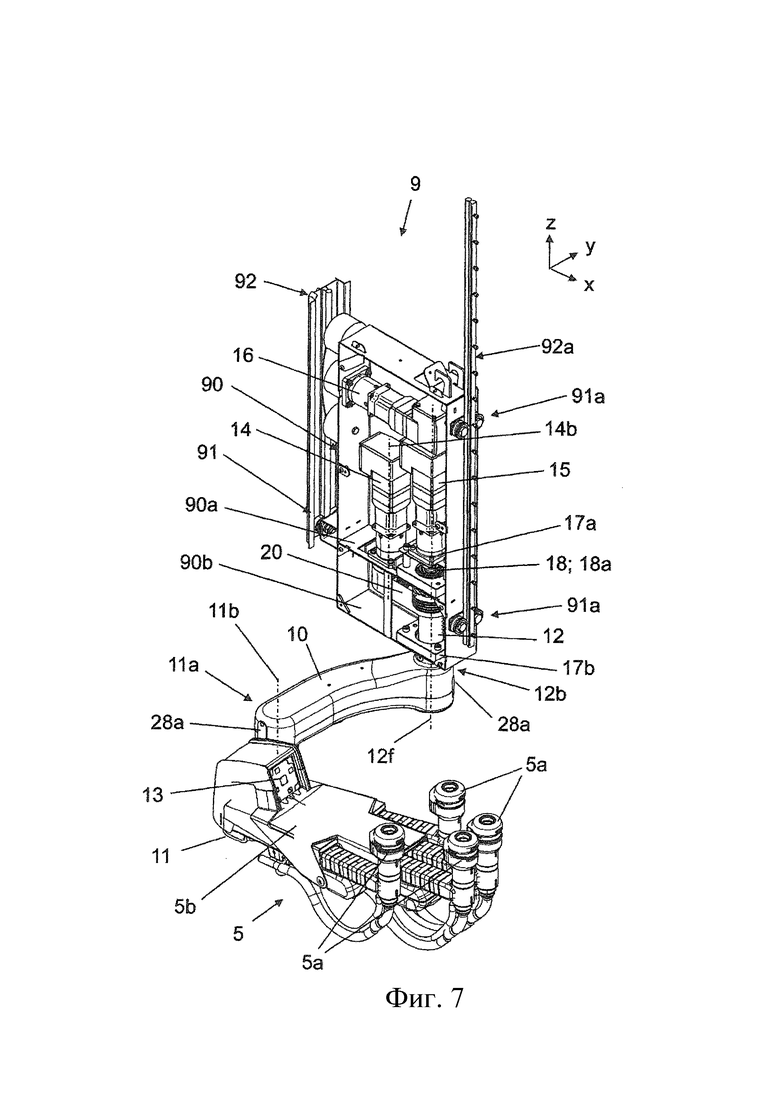
Фиг. 7 представляет собой увеличенное изображение предлагаемого рычажного механизма, выполненного согласно фиг. 6, в исходном положении.
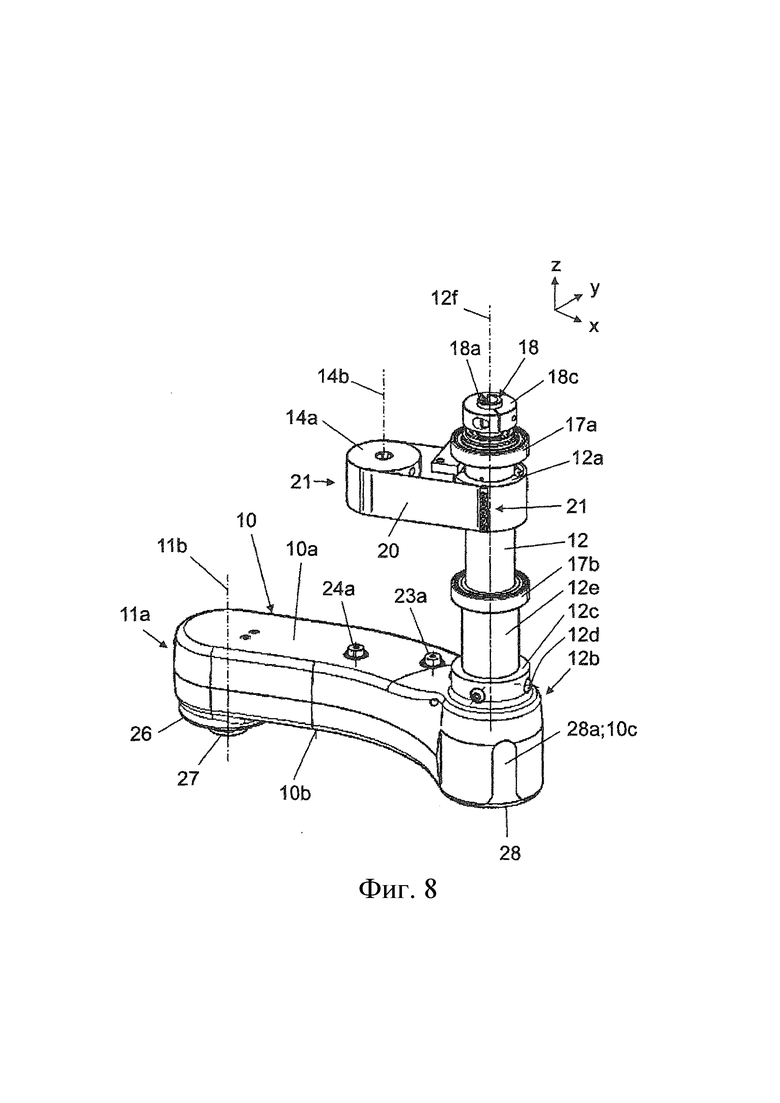
Фиг. 8 представляет собой аксонометрический частичный вид предлагаемого рычажного механизма, выполненного согласно фиг. 6.
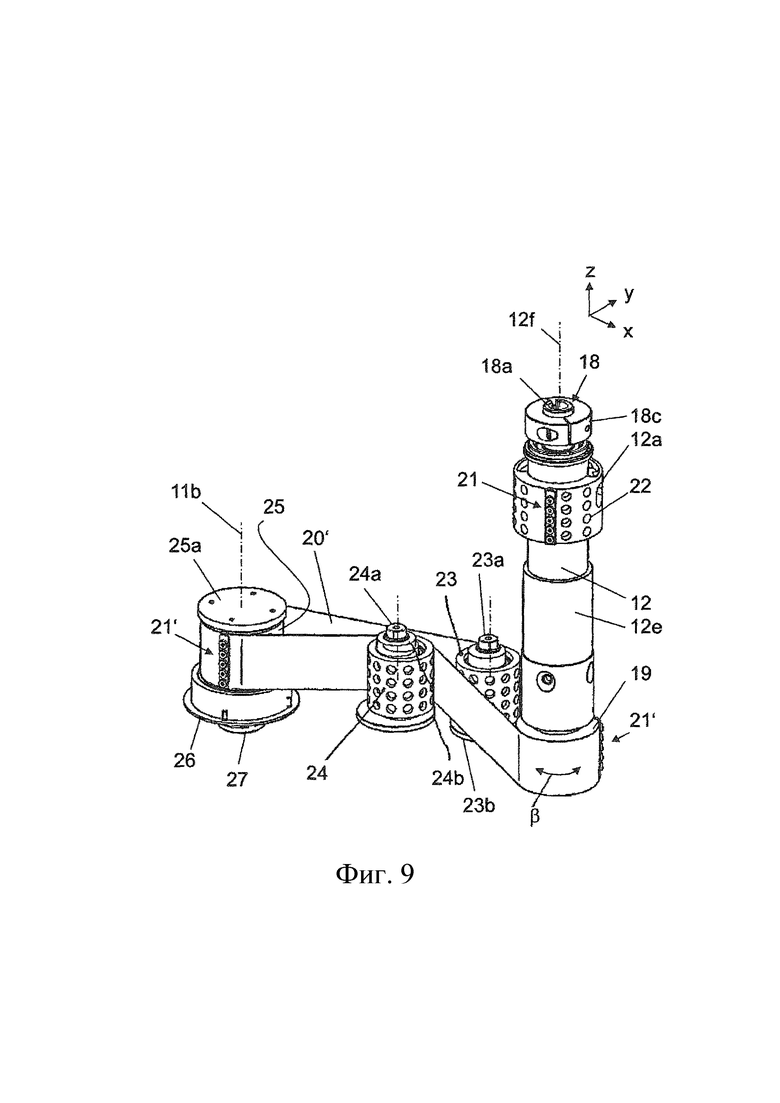
Фиг. 9 представляет собой аксонометрический частичный вид функциональных элементов предлагаемого рычажного механизма, выполненного согласно фиг. 8.
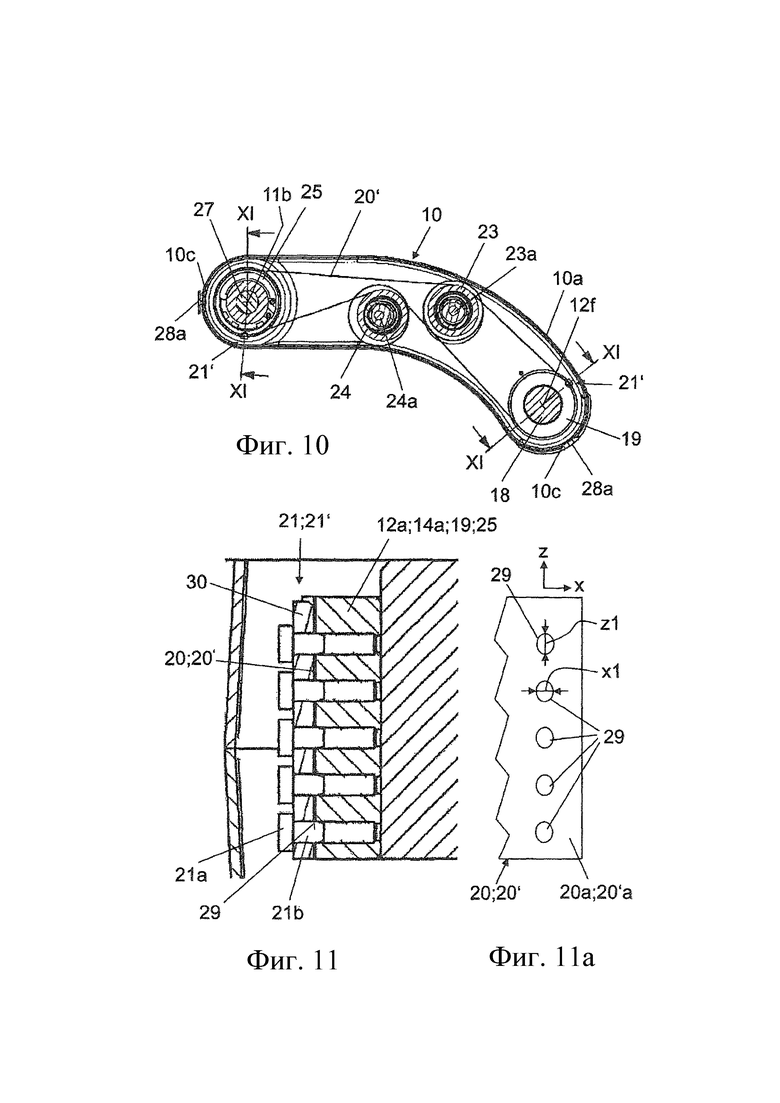
Фиг. 10 представляет собой вид в разрезе рычага предлагаемого рычажного механизма в плоскости x-y (см. фиг. 8).
Фиг. 11 представляет собой схематичный вид в разрезе вдоль линий XI-XI (см. фиг. 10).
Фиг. 11a представляет собой схематичное изображение крепежного участка передаточного элемента.
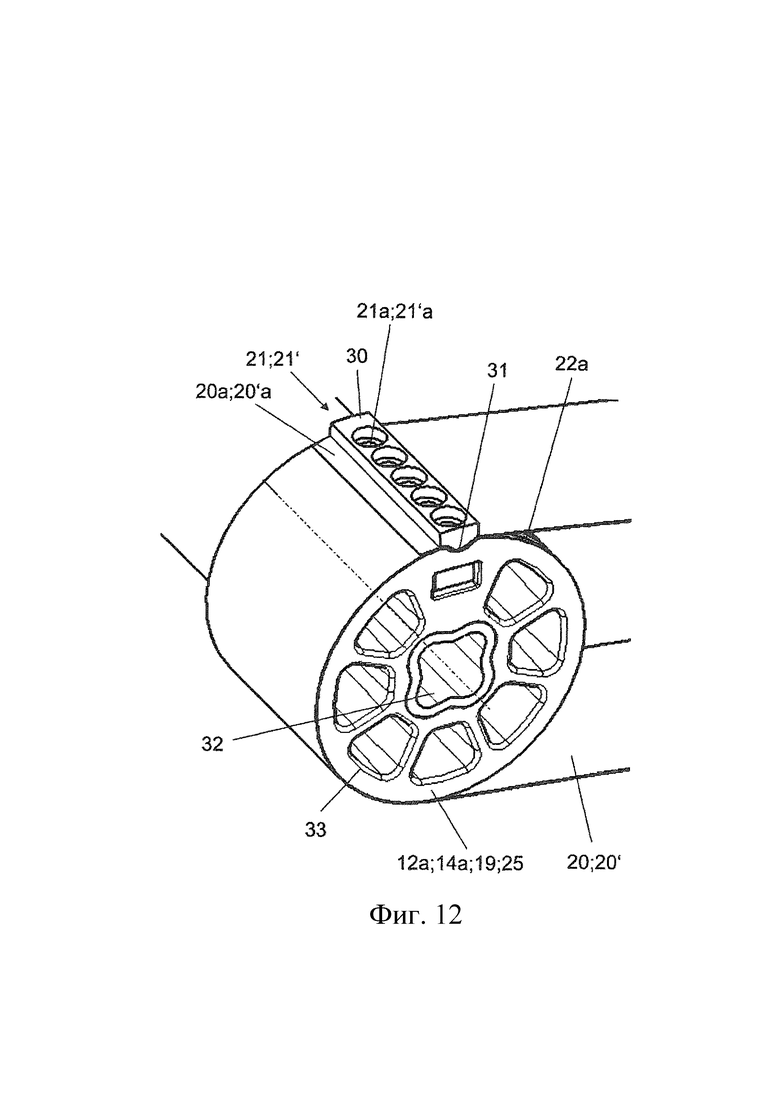
Фиг. 12 представляет собой схематичное аксонометрическое изображение приводного/выходного колеса с передаточным элементом.
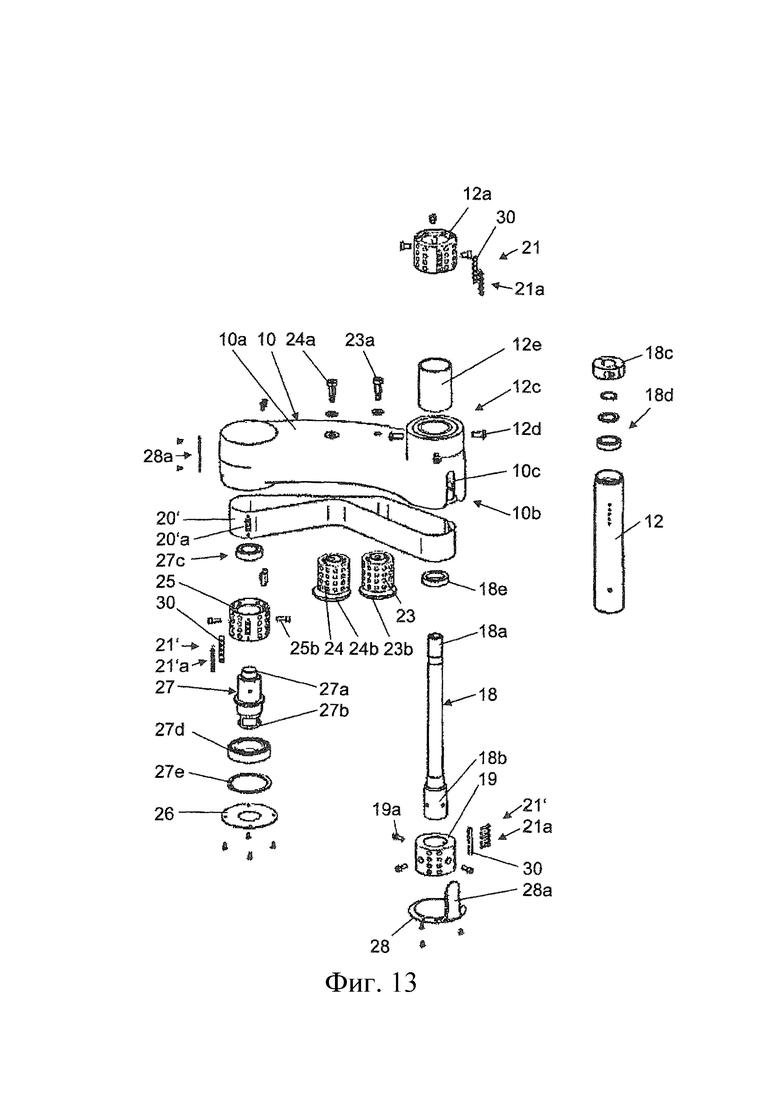
Фиг. 13 представляет собой схематичное аксонометрическое покомпонентное изображение функциональных элементов предлагаемого рычажного механизма, выполненного согласно фиг. 8.
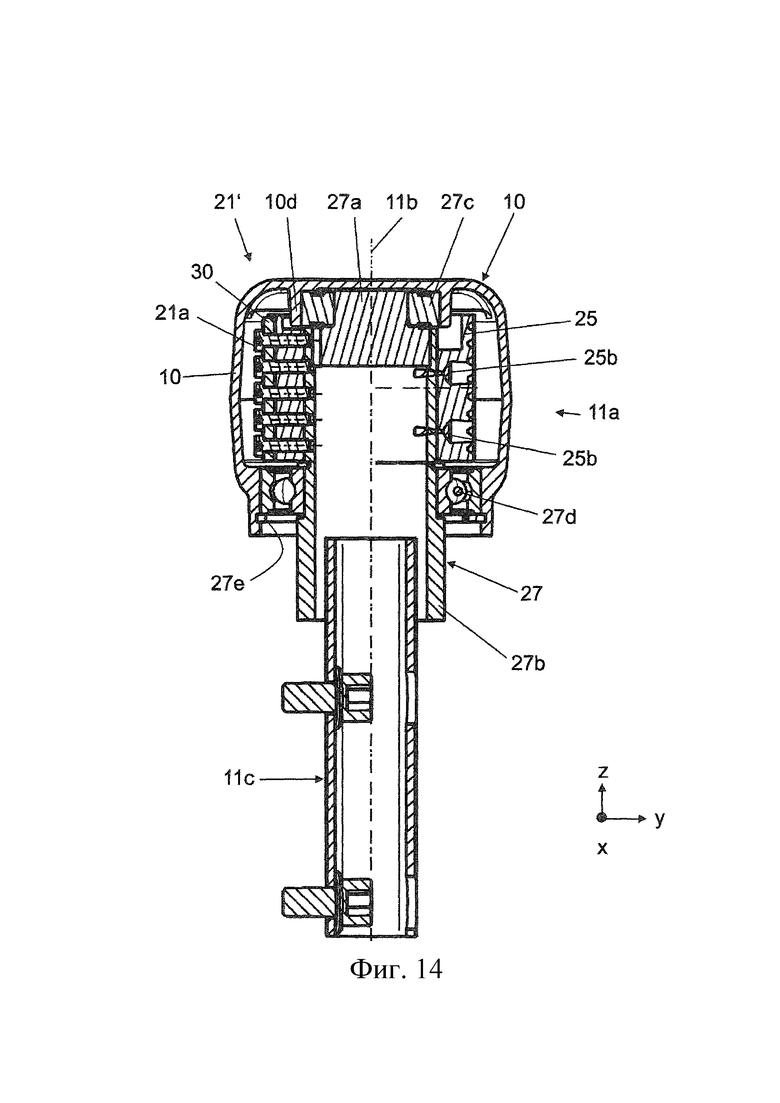
Фиг. 14 представляет собой вид в разрезе шарнира держателя.
Фиг. 15 представляет собой вид в разрезе установленного прижимного ролика.
Одинаковые или сходные функциональные элементы указаны на чертежах одними и теми же ссылочными обозначениями. На некоторых чертежах показано вертикальное направление z, причем координаты x, y даны для разных плоскостей.
Указания места, например, "вверху", "внизу", "слева", "справа" и т.д., относятся к соответствующим изображениям на чертежах.
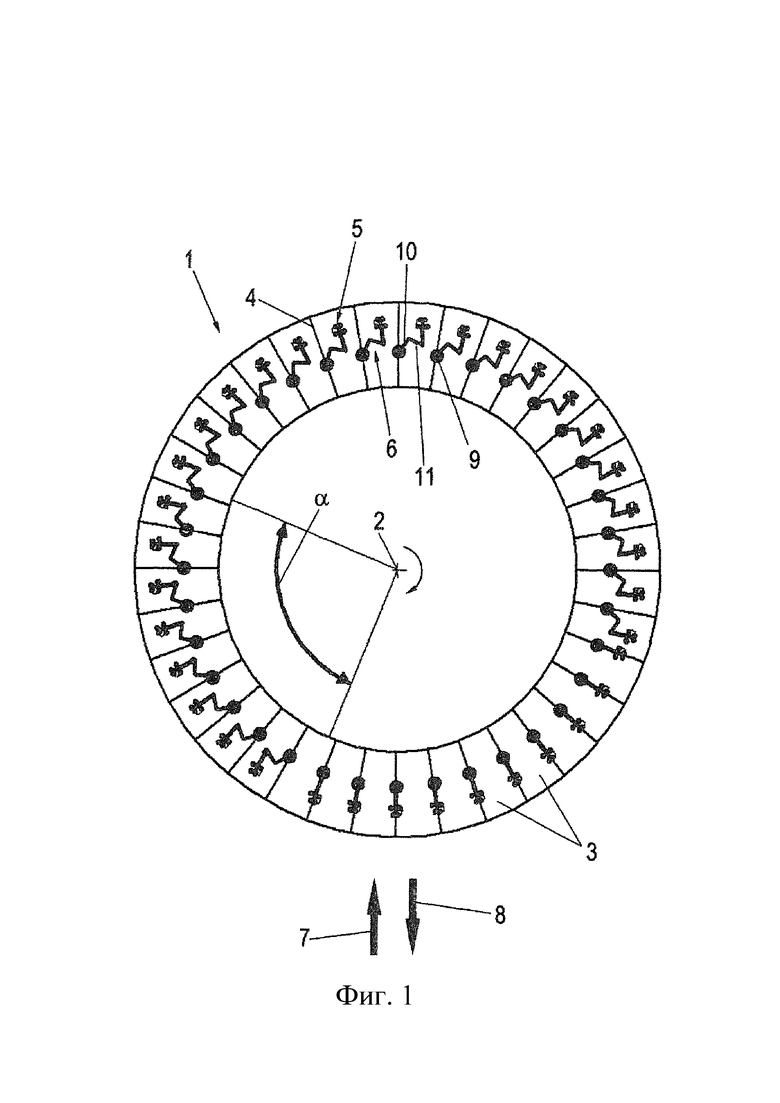
На фиг. 1. схематично показан сверху первый пример осуществления предлагаемой доильной установки 1, содержащей предлагаемые перегородки 4 с предлагаемыми рычажными механизмами 6. Фиг. 1a представляет собой схематичный вид сверху доильных станков, показанных на фиг. 1.
Доильная установка 1 устроена по типу так называемой доильной карусели с доением снаружи. При этом доимые животные стоят так, что их головы ориентированы к центру, т.е. к точке 2 поворота. Здесь карусель может вращаться вокруг точки 2 поворота по часовой стрелке. В этом примере по периметру карусели расположено тридцать шесть доильных станков 3, разделенных перегородками 4. Перегородки 4 также обозначены, например, как боковые решетки, и они расположены приблизительно параллельно продольной оси доимого животного. Доильную установку 1 применяют для машинного доения дойных животных, например, коров, при помощи доильных аппаратов 5. Для каждого доильного станка 3 предусмотрен доильный аппарат 5, который при помощи рычажного механизма 6 может перемещаться в доильном станке 3 из исходного положения в рабочее положение, под вымя доимого животного, например, коровы. Каждый доильный аппарат 5 расположен внутри перегородки 4. Эти положения более подробно будут рассмотрены ниже.
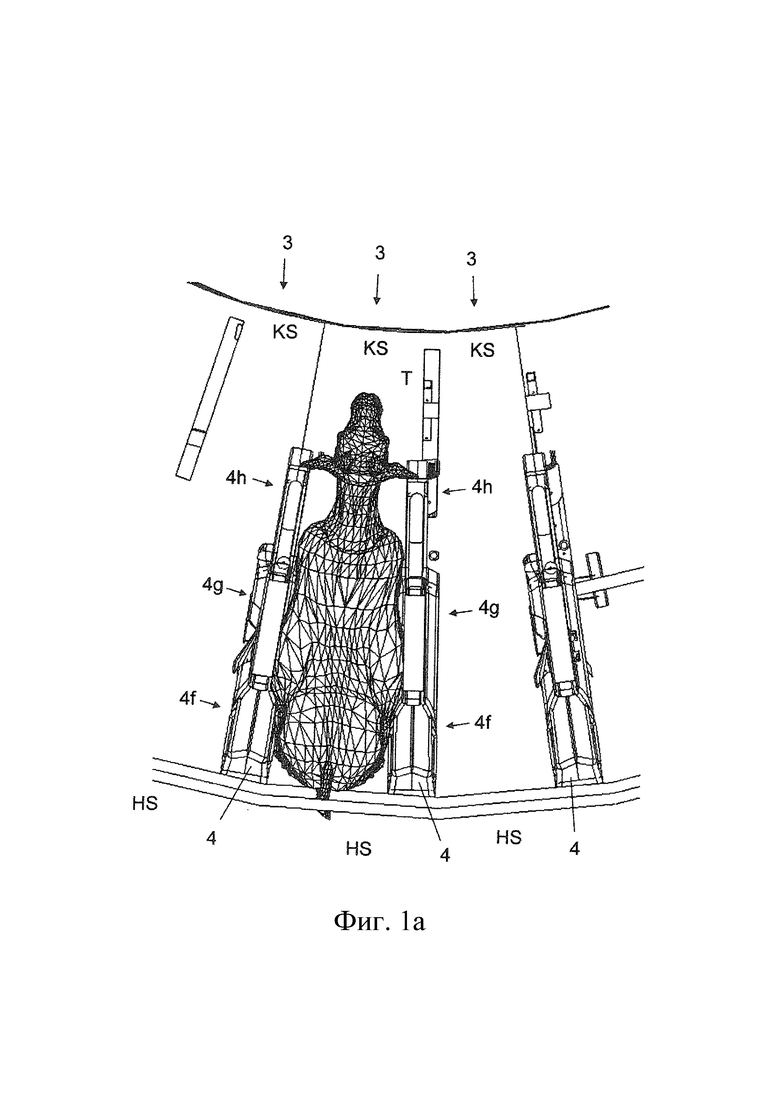
Как правило, доильный станок 3 имеет две продольные стороны и две узкие стороны. Продольные стороны и узкие стороны (частично) могут быть расположены под прямым углом друг к другу (см. например, фиг. 2, 2a, 3) или под углами, не равными 90° (см. например, 1a). Доимое животное T стоит между продольными сторонами, его голова направлена к узкой стороне, которую называют головной стороной KS, причем другая узкая сторона соответствует задней части доимого животного T и называется задней стороной HS.
Перегородка 4 расположена по меньшей мере на одной из продольных сторон и образует боковое ограничение доильного станка 3.
В случае доильной установки 1'; 1'' с расположенными рядом друг с другом прямоугольными доильными станками 3, каждый из которых имеет параллельные продольные стороны, как это имеет место, например, в доильной установке с параллельным расположением станков (см. фиг. 2, 2a, 3), перегородка 4 расположена параллельно воображаемой продольной оси доимого животного. При этом для упрощения предполагается, что во время доения доимое животное T стоит неподвижно со своей воображаемой продольной осью в идеальном состоянии.
В случае доильной установки 1 с расположенными по кругу станками, например, в доильной карусели, продольные стороны доильных станков 3 не параллельны. В этом случае продольные стороны представляют собой отрезки радиусов круга доильной карусели и пересекаются в воображаемом продолжении в центре этого круга или в точке 2 поворота карусели, причем они образуют центральный угол. Воображаемая продольная ось доимого животного в идеальном случае проходит также через точку поворота и делит этот центральный угол пополам. Ниже этот случай для краткости обозначается, как "приблизительно параллельно".
Животные (см. фиг. 1) могут заходить на карусель через вход 7 и снова выходить из нее через выход 8. После входа животного в доильный станок 3 важно, чтобы оно заняло заданное положение. Это достигается благодаря тому, что перегородки 4 образуют огороженный доильный станок 3. Следовательно, продольные стороны доильных станков 3 образуются перегородками 4. Каждый доильный станок 3 имеет узкие стороны KS и HS, расположенные между передними и задними концами продольных сторон. Несмотря на свои компактные размеры, перегородки 4 содержат все компоненты для предварительного окунания в дезинфицирующий раствор, очистки сосков, установки доильного аппарата 5, доения, снятия доильного аппарата 5 и окунания после доения. По своей продольной оси каждая перегородка 4 может быть разделена на три части: заднюю часть 4f, среднюю часть 4g и переднюю часть 4h. Эти части 4f, 4g, 4h по существу соответствуют частям тела доимого животного.
Если животное T стоит в доильном станке 3, то предпочтительно в круговом сегменте, который здесь обозначается, как зона α установки, доильный аппарат 5 перемещается из исходного положения в перегородке 4 сбоку животного в рабочее положение между его передними и задними ногами, под вымя животного и устанавливается к вымени при помощи датчика 13 положения (см., например, фиг. 4, 5). Однако в принципе установка может осуществляться при любом положении карусели, например, когда доильный аппарат 5 снова разъединен. В первом примере осуществления на каждой перегородке 4 расположен узел 9 привода (более подробно рассмотрен ниже), соединенный с рычажным механизмом 6. По завершении процесса доения доильный аппарат 5 при помощи рычажного механизма 6 и узла 9 привода снова снимается или опускается сам в положение ожидания или окончания доения, а затем перемещается в исходное положение.
Все доильные станки 3 на внешнем периметре доильной установки 1 доступны для дояра, так что он может вмешаться в процесс доения в любой момент времени. Поэтому в этой рабочей зоне дополнительные устройства отсутствуют. Опасность для дояра минимальна. Доильная карусель может постоянно совершать вращение; для лица, осуществляющего контроль, в любое время без опасности для этого лица доступна даже внутренняя часть такой доильной установки или системы доения.
Рычажный механизм 6, имеющий рычаг 10 и держатель 11, предназначен для того, чтобы переносить доильный аппарат 5 со сбалансированным весом, и он должен иметь такой легкий ход, чтобы он мог следовать за движениями доимого животного.
Более подробно рычажный механизм 6 описывается ниже.
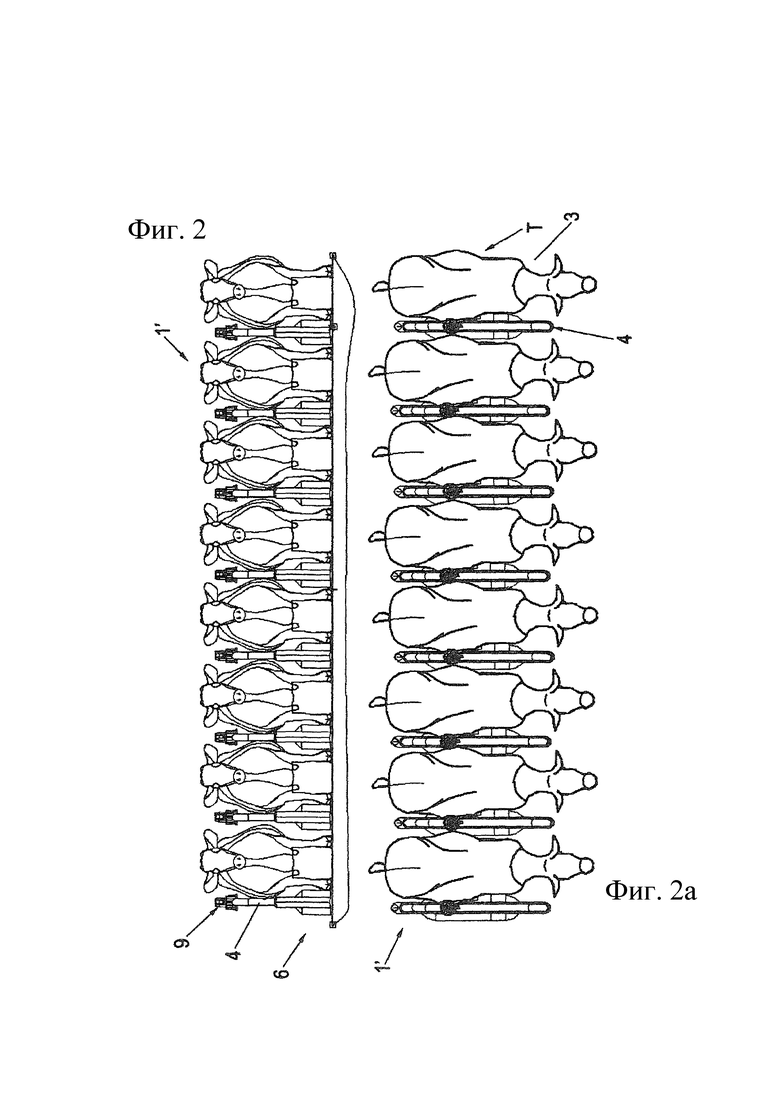
На фиг. 2 и 2a схематично изображен второй пример осуществления предлагаемой доильной установки 1', содержащей предлагаемые перегородки 4. Фиг. 2 представляет собой вид спереди, а фиг. 2a - вид сверху. Здесь доильные станки 3 расположены рядом друг с другом и разделены перегородками 4. В доильных станках 3 находятся доимые животные, в данном случае коровы. На каждой перегородке 4 расположен узел 9 привода для рычажного механизма 6 с доильным аппаратом 5.
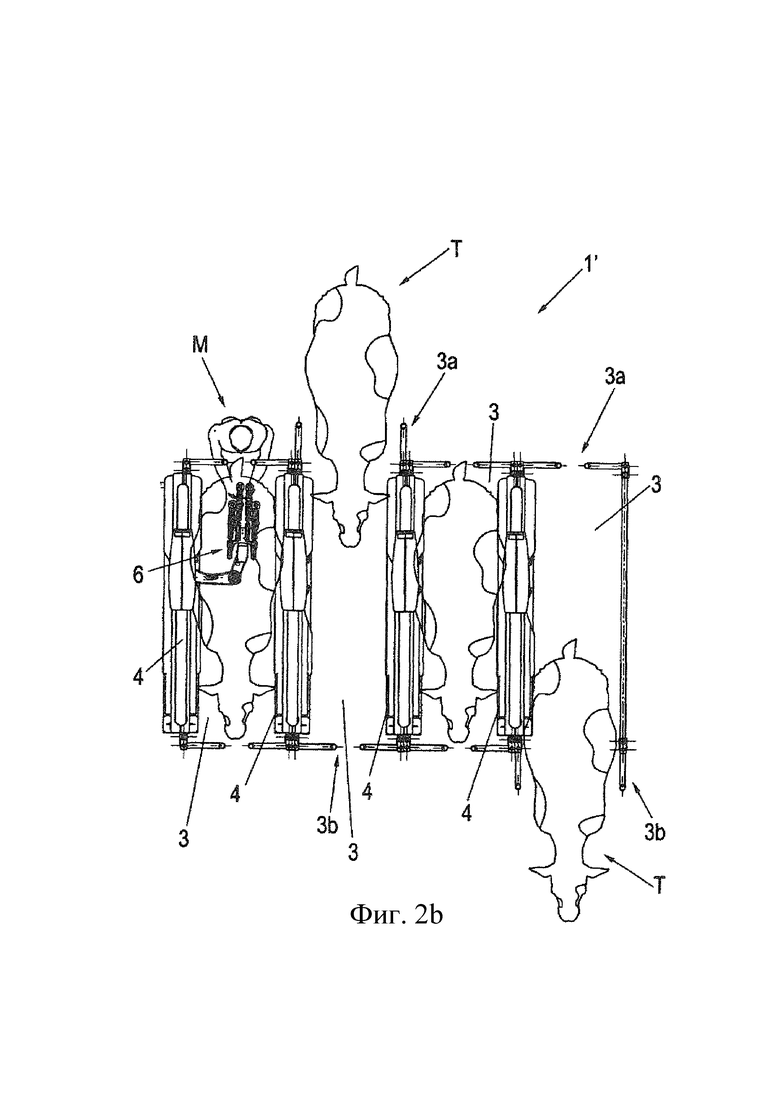
На фиг. 2b показан схематичный вид сверху варианта второго примера осуществления, выполненного согласно фиг. 2-2a. Этот вариант также обозначен, как доильная установка 1' со сквозным проходом. Доильные станки 3 разделены сбоку перегородками 4. На узких задних и передних сторонах доильных станков 3 в каждом случае установлены ворота 3a, 3b, причем ворота 3a с задних сторон открыты, чтобы образовать для животного T вход в доильный станок 3 (второй станок 3 слева на фиг. 2b). С передней стороны животное T выйти не может, так как эта сторона закрыта воротами 3b. Если животное T находится полностью в доильном станке 3, то ворота 3a задней стороны закрываются (первый и третий станки 3 слева на фиг. 2b). Если процесс доения завершен, то ворота 3b передней стороны открываются, и животные T снова могут выйти из доильного станка 3, как показано для четвертного станка 3 слева на фиг. 2b.
На фиг. 3 показан схематичный вид сверху третьего примера осуществления предлагаемой доильной установки 1'', содержащей предлагаемые перегородки 4. В этом третьем примере осуществления перегородки 4 расположены с возможностью поворота в U-образном проходе, причем сначала они образуют проход благодаря тому, что перегородки 4 повернуты в одну линию и направляют животных T. Ниже описывается проход, который на фиг. 3 расположен справа. Это описание относится и к левому проходу (в зеркальном отображении). Как только первое животное доходит до конца U-образного прохода, первая перегородка 4 на конце поворачивается так, что образуется доильный станок 3. Этот поворот может происходить либо под управлением поворотного исполнительного механизма, либо автоматически вследствие движения животного T. Эти процессы протекают до тех пор, пока в доильной установке 1'' не будут расположены все животные. Здесь на каждой перегородке 4 также расположен узел 9 привода для рычажного механизма 6 с доильным аппаратом 5. Здесь также возможна стыковка (более подробно поясняется ниже) узлов 9' привода, перемещающихся по расположенной вверху или внизу направляющей.
В данном случае симметрично расположено два U-образных прохода, разделенных так называемой траншеей G. Траншея G представляет собой место, где находится дояр, который отсюда с обеих сторон контролирует процесс доения и при необходимости может осуществить соответствующее вмешательство, не встречая помех из-за движения рычажных механизмов 6.
Конечно, также возможна конструкция типа "елочка", в которой доильные станки 3 разделены перегородками 4. Это показано на фиг. 3a, представляющей собой схематичный вид сверху варианта третьего примера осуществления, выполненного согласно фиг. 3. На фиг. 3 доильные станки 3 образованы перегородками 4, сложенными перед этим друг с другом так, что образуется проход для входа, причем сложенные друг с другом перегородки 4 образуют непрерывное ограждение этого входа. Если первое животное T доходит до конца доильной установки, образованного ограждением, которое подробно не показано и на фиг. 3 расположено под прямым углом, а на фиг. 3a - под углом, например, 45° к продольной оси входа, то первая перегородка 4 поворачивается по часовой стрелке до тех пор, пока она не будет проходить параллельно этому ограждению и не образует с ним первый доильный станок 3. Таким образом, все доильные станки образуются в результате соответствующего поворота друг за другом перегородок 4. Благодаря тому, что животные T стоят под углом, т.е. их воображаемые продольные оси проходят под углом к продольной оси входа, задние части животных T доступны для дояра M сбоку. На фиг. 3 стороной, доступной для дояра, является левая сторона животного T.
В случае доильных установок 1', выполненных согласно фиг. 3 и 3a, перегородки 4 могут быть не сложены друг с другом, а расположены так, что они могут перемещаться вдоль своих продольных осей. Подробное описание имеется в патентном документе WO 2013/135248 A1. Перед этим перегородки 4 вне области животных T уже были установлены так, что они располагаются параллельно, под прямым или непрямым углом относительно ограждения. Как только воображаемая продольная ось первого животного T располагается рядом с ограждением, первая перегородка 4 перемещается в направлении своей продольной оси в область животных T так, что она находится с другого бока животного T и образует доильный станок 3. При выходе из образованных таким образом доильных станков 3 ограждение открывается (поворачивается или перемещается в направлении своей продольной оси), и первое животное T может покинуть доильный станок 3. После этого первая перегородка 4 снова перемещается назад в направлении своей продольной оси, в свое исходное положение и т.д.
На фиг. 3b сверху схематично показан еще один вариант третьего примера осуществления, выполненного согласно фиг. 3. Такую доильную установку 1'' также называют установкой с последовательным расположением доильных станков (тандем). В этом случае доильные станки 3 расположены друг за другом, последовательно, причем их узкие стороны отделены друг от друга траншеей G' для дояра M и в каждом случае имеют ограждения, например, решетки. Продольные стороны доильных станков 3 в каждом случае образуются, во-первых, из перегородки 4, а во-вторых, из состоящего из двух частей ограждения, выполненного в виде ворот 3a, 3b. Ворота 3a среднего доильного станка 3 распахнуты, чтобы впустить животное T в доильный станок 3, в то время как ворота 3b закрыты. В течение процесса доения закрыты как ворота 3a, так и ворота 3b. После доения ворота 3b, расположенные со стороны головы животного T, открываются, и животное T может покинуть доильный станок 3.
Фиг. 4. представляет собой схематичное аксонометрическое изображение предлагаемой перегородки 4 с предлагаемым рычажным механизмом 6 в исходном положении. На фиг. 5. показано схематичное аксонометрическое изображение предлагаемой перегородки 4 с предлагаемым рычажным механизмом 6 в рабочем положении.
Здесь перегородка 4 выполнена в виде кожуха, в котором расположены все исполнительные устройства для рычажного механизма 6 и доильного аппарата 5, а также элементы управления и узлы привода. Таким образом, перегородка 4 представляет собой комплектный узел, который можно предварительно собрать в заданном месте, заменить в комплекте или модернизировать.
В данном случае перегородка 4 представляет собой трубчатую конструкцию, содержащую слегка наклонную переднюю стойку 4a и заднюю стойку 4b. Стойки 4a, 4b соединены посредством проходящей в горизонтальном направлении горизонтальной штанги 4c. Начиная приблизительно с половины высоты, стойки 4a, 4b покрыты кожухом 4d, проходящим приблизительно до нижних концов стоек 4a, 4b. Стойки 4a, 4b и горизонтальная штанга 4c могут быть изготовлены также заодно целое из гнутой трубы. В передней половине кожуха 4d выполнено отверстие 4e, в результате внутри перегородки 4 в кожухе 4d получается гнездо, которое также может иметь направленные в стороны выпуклости (см., например, фиг. 7), так что оно вмещает и окружает установленный в исходное положение доильный аппарат 5. Сбоку отверстия 4e может быть установлена дополнительная защитная крышка (на чертеже не показана) для защиты доильного аппарата 5. При активации доильного аппарата 5 защитная крышка может сдвигаться, например, в направлении перегородки 4, чтобы открыть отверстие 4e. В еще одном варианте осуществления защитная крышка может быть установлена также на доильном аппарате 5. Таким образом, защитная крышка сохраняет жесткое соединение с доильным аппаратом 5 и перемещается вместе с ним. Кроме того, в рабочем положении ее размер может быть уменьшен, например, в результате автоматического складывания или сдвигания.
В этом примере осуществления доильный аппарат 5 имеет четыре доильных стакана 5a и установлен с кронштейном 5b доильного аппарата на держателе 11 рычажного механизма 6. Каждый из этих четырех доильных стаканов 5a может принимать разное положение, автоматически фиксироваться или переключаться в режим свободного перемещения независимо от других стаканов. Таким образом, в установленном состоянии доильные стаканы 5a могут принимать индивидуальные положения, так как доильные стаканы 5a устанавливаются по отдельности. Кроме того, возможно предварительное позиционирование доильных стаканов (на чертеже не показано), посредством которого возможна одновременная установка нескольких доильных стаканов.
Кроме того, доильный аппарат 5 имеет датчик 13 положения, который в данном случае выполнен в виде трехкоординатного фотодатчика. Благодаря датчику 13 положения доильный аппарат 5 при помощи рычажного механизма 6 и узла 9 привода перемещается из исходного положения в рабочее положение (см. фиг. 5).
Рычажный механизм 6 может быть сложен вместе с доильным аппаратом 5 в соответствующей плоскости x-y по типу ножничного механизма, благодаря этому в исходном положении, когда доильный аппарат 5, например, находится в своем положении безразборной мойки, ширина доильного аппарата 5 в нижней сложенной части превышается не существенно. В положении безразборной мойки очищаются доильные стаканы 5a. Дополнительные детали по этому вопросу можно найти в документе WO 2013/135842 A1.
В рабочем положении доильный аппарат 5 может принимать различные положения. Например, положение установки служит для того, чтобы позиционировать доильные стаканы 5a так, что каждый из них может быть прикреплен к соответствующему соску доимого животного. В процессе доения рычажный механизм 6 поддерживает доильный аппарат 5 так, что вес аппарата 5 не затрудняет процесс доения. По завершении доения доильные стаканы 5a снова отсоединяются от вымени доимого животного.
Узел 9 привода предназначен для создания вращательных или поворотных движений, соответствующим образом передаваемых в рычажный механизм 6. Такая передача вращательных или поворотных движений от двигателей или приводов узла 9 привода происходит, например, через передачу при помощи зубчатых колес и/или тяг, средств тяги и т.д.
Управление процессами движения рычажного механизма 6 и доильного аппарата 5 осуществляется при помощи управляющего устройства, которое здесь не показано. Управляющее устройство соединено с датчиком 13 положения и узлом 9 привода. В этом примере осуществления узел 9 привода установлен на верхнем конце вала 12 привода рычага. Вал 12 привода рычага, а вместе с ним и узел 9 привода и рычажный механизм 6 с доильным аппаратом 5 закреплены в подшипниковом узле 17 на горизонтальной штанге 4c перегородки 4 и направлены с возможностью как поворота, так и перемещения в вертикальном направлении. Своим нижним концом вал 12 привода рычага жестко соединен с концом рычага 10 рычажного механизма 6. На своем верхнем конце вал 12 рычага соединен с приводом узла 9 привода. В вале 12 рычага, выполненном в виде полого вала, расположен еще один вал для привода держателя 11, который может приводиться в действие еще одним приводом узла 9 привода. Подробно это будет объяснено ниже. Вал 12 привода рычага и соединенный с ним рычажный механизм 6 с доильным аппаратом 5 может перемещаться в вертикальном направлении z при помощи вертикального привода 16 (см. фиг. 6), например, пневмоцилиндра. Перемещение доильного аппарата 5 из исходного положения в рабочее положение или другие положения происходит в результате последовательности комбинированных движений - как в вертикальном направлении z, так и в соответствующей плоскости x-y.
Приводы узла 9 привода могут быть выполнены в разных исполнениях, например, в виде серводвигателей с соответствующими передачами, хотя также может использоваться двигатель непосредственной передачи поворота. Кроме того, их можно выполнить в виде так называемых моментных двигателей, благодаря чему достигают определенной эластичности рычажного механизма 6 и доильного аппарата 5. Например, можно амортизировать удары доимого животного.
Таким образом, рычаг 10 и держатель 11 можно целенаправленно приводить в движение независимо друг от друга.
Здесь узел 9 привода расположен в верхней части перегородки 4, над доимым животным, за пределами его досягаемости. С одной стороны, это обеспечивает то преимущество, что узел 9 привода находится в области, не подверженной опасности толчков. К тому же верхняя часть, расположенная выше животного, лучше защищена от влаги и связанных с ней повреждений. Кроме того, благодаря этому возможна особенно узкая конструкция перегородки 4. Рычажный механизм 6 с доильным аппаратом 5 расположен в нижней части перегородки 4 так, что может происходить необходимый поворот сбоку рычажного механизма 6 с доильным аппаратом 5 под брюхом доимого животного. При этом также можно избежать столкновения с ногами доимого животного.
В исходном положении доильного аппарата 5 и рычажного механизма 6 внутри кожуха 4d перегородки 4 доильный аппарат 5 может перемещаться под устройство для очистки, описанное в документе WO 2013/135842 A1. Этот документ также упоминается в отношении описания начала доения.
На фиг. 6 показано аксонометрическое изображение варианта осуществления предлагаемой перегородки 4 с предлагаемым рычажным механизмом 6 в рабочем положении. Кроме того, на фиг. 7 показано увеличенное изображение предлагаемого рычажного механизма 6 согласно фиг. 6 также в рабочем положении. На фиг. 8 представлен аксонометрический частичный вид предлагаемого рычажного механизма 6 согласно фиг. 6.
В этом варианте кожух 4d перегородки 4 имеет две самонесущие полуоболочки. При этом эти полуоболочки разделены на части 4f, 4h и 4i. Соотнесение частей 4f, 4h и 4i с боком доимого животного T уже пояснено выше в связи с фиг. 1a. Часть 4f соотнесена с задней частью доимого животного T и называется задней частью 4f. Эта часть содержит полость для монтажа не описанного подробно сервисного блока. Дополнительные сведения по этому вопросу имеются в патентном документе WO 2013/135842 A1.
К задней части 4f примыкает средняя часть 4h, которая содержит гнездо 4e для доильного аппарата 5 с рычажным механизмом 6 и соответствующие приводы узла 9 привода. Средняя часть 4g соотнесена со средней частью доимого животного T. Подробно узел 9 привода поясняется ниже.
Передняя часть 4h соотнесена с головой доимого животного T и соединена со стойкой 4a, которая на своей верхней стороне с некоторым радиусом изогнута назад и переходит в горизонтальную штангу 4c, которая здесь в заднем направлении наклонена вниз. Горизонтальная штанга 4с проходит до переднего торца средней части 4g, который здесь проходит вверх и соединен с горизонтальной штангой 4c. Наклон горизонтальной штанги 4c в заднем направлении продолжается в наклоне верхней стороны задней части 4f.
Узел 9 привода имеет привод 14 рычага для поворота рычага 10, привод 15 держателя для поворота держателя 11 с доильным аппаратом 5 и вертикальный привод 16 для перемещения рычажного механизма 6 в вертикальном направлении z. Привод 14 рычага и привод 15 держателя установлены в раме 90, которая выполнена с возможностью перемещения в вертикальном направлении z и может быть перемещена при помощи вертикального привода 16. При помощи вертикальных направляющих опор 91, 91a рама 90 на обеих продольных сторонах направлена с возможностью перемещения в вертикальном направлении z на вертикальном направляющем элементе 92, 92a, например, на соответствующей профильной планке. Вертикальные направляющие опоры 91, 91a и вертикальные направляющие элементы 92, 92a подробно не описаны, но они хорошо видны на фиг. 7.
При этом привод 14 рычага и привод 15 держателя закреплены рядом друг с другом на несущем элементе 90a в раме 90. В данном случае привод 15 держателя установлен на первом подшипнике 17a подшипникового узла 17, причем второй подшипник 17b подшипникового узла 17 установлен ниже, на еще одном несущем элементе 90b рамы 90. Несущие элементы 90a, 90b проходят параллельно друг другу в продольном направлении перегородки 4, а в вертикальном направлении z расположены на некотором расстоянии друг от друга. В этом варианте осуществления второй несущий элемент 90b является частью рамы 90.
Вал 12 привода рычага установлен в первом подшипнике 17a и втором подшипнике 17b подшипникового узла 17 с возможностью поворота вокруг вертикального направления z и проходит в вертикальном направлении z. Под верхним несущим элементом 90a вал 12 привода рычага при помощи передаточного элемента 20 соединен с выходом привода 14 рычага, ниже это будет описано подробно. Нижний конец вала 12 привода рычага соединен с концом рычага 10. Более подробно это будет объяснено также ниже. В продольном направлении несущего элемента 90a привод 14 рычага может регулироваться при помощи не обозначенного натяжного устройства для натяжения передаточного элемента 20.
Внутри вала 12 привода рычага, выполненного в виде полого вала, установлен вал 18 привода держателя (см. также 8) с возможностью поворота вокруг вертикального направления z, причем вал 18 привода держателя может вращаться независимо от вала 12 привода рычага. Над первым подшипником 17a вал 18 привода держателя соединен с выходом привода 15 держателя.
Ниже подробно описывается рычаг 10. В исходном положении, показанном на фиг. 7, этот рычаг проходит в плоскости x-y влево от своего конца, на этом чертеже находящегося справа, обозначенного, как шарнир 12b рычага, и соединенного с нижним концом вала 12 привода рычага (в случае доильного станка 3 - к его головной стороне KS (фиг. 1a)). Левый конец рычага 10 носит название шарнира 11a держателя, вокруг которого вокруг вертикального направления z может поворачиваться держатель 11 с доильным станком 5. На каждом из обоих концов рычага 10 имеется заглушка 28a монтажного отверстия, описанная ниже. Из этих двух заглушек здесь видна только заглушка на правом конце рычага 10.
Для наглядности приводы 14, 15 на фиг. 8 не показаны, но их легко представить в связи с фиг. 6 и 7.
Оба вала - вал 12 привода рычага и вал 18 привода держателя - расположены концентрически относительно оси 12f рычага, в данном случае проходящей в вертикальном направлении z.
Как хорошо видно из фиг. 8, верхний конец вала 12 привода рычага установлен с возможностью поворота в первом подшипнике 17a. Верхний конец вала 18 привода держателя обозначен, как приводной конец 18a, и имеет подробно не описываемую муфту 18c держателя, с которой без возможности поворота может соединяться выход привода 15 держателя (см. фиг. 7).
Соединение передаточного элемента 20 с валом 12 привода рычага происходит при помощи приводного колеса 12a рычага, смонтированного на валу 12 привода рычага без возможности поворота относительного него. Кроме того, передаточный элемент 20 посредством выходного колеса 14a рычага соединен с выходом привода 14 рычага. Выходное колесо 14a рычага может вращаться вокруг выходной оси 14b рычага, проходящей в вертикальном направлении z параллельно оси 12f рычага.
В данном случае передаточный элемент 20 представляет собой средство тяги из металлической ленты. Он соединен с выходным колесом 14a рычага и приводным колесом 12a рычага, в каждом случае при помощи крепежного устройства 21. Более подробно крепежное устройство 21 будет рассмотрено ниже. Передаточный элемент 20 охватывает выходное колесо 14a рычага и приводное колесо 12a рычага, в каждом случае с углом охвата 180°, и имеет ширину, т.е.протяженность в вертикальном направлении z. Эта ширина приблизительно соответствует наружному диаметру выходного колеса 14a рычага.
Вал 12 привода рычага установлен примерно в своей средней части во втором подшипнике 17b и проходит дальше вниз через втулку 12e в своего рода кольцо, образующее крепление 12c рычага, жестко соединенное с правым концом рычага 10. Нижний конец вала 12 привода рычага помещен в креплении 12c рычага и закреплен здесь по окружности при помощи четырех крепежных элементов 12d. Таким образом, при помощи вала 12 привода рычага рычаг 10 может поворачиваться вокруг оси 12f рычага.
Рычаг 10 имеет форму банана. Он содержит корпус 10a, закрытый на нижней стороне заглушкой или нижней частью 10b корпуса. На левом конце рычага 10 установлен шарнир 11a держателя, который еще будет описан ниже в связи с фиг. 8. Снизу шарнир 11a держателя закрыт удерживающей пластиной 26, через которую вниз наружу проходит вал 27 держателя, соединяемый с держателем 11.
На правом конце рычага 10, образующем шарнир 12b рычага, в стенке корпуса 10a имеется своего рода удлиненное отверстие, образующее монтажное отверстие 10c (лучше всего видно на фиг. 13) и проходящее в вертикальном направлении z. В данном случае это монтажное отверстие 10c закрыто заглушкой 28a монтажного отверстия крышки 28. Крышка 28 закрывает шарнир 12b рычага снизу. Такое же монтажное отверстие 10c имеется и на другом конце рычага 10, в области шарнира 11a держателя. Функция монтажного отверстия 10c пояснена ниже.
На верхней стороне корпуса 10a рычага 10 имеется крепежный элемент 23a и регулировочный элемент 24a, которые выступают из корпуса 10a или доступны через стенку корпуса 10a на верхней стороне. Функция этих элементов описывается в связи с фиг. 9.
На фиг. 9 показан аксонометрический частичный вид функциональных элементов предлагаемого рычажного механизма 6, выполненного согласно фиг. 8. Фиг. 10 показывает вид в разрезе рычага 10 предлагаемого рычажного механизма 6 в плоскости x-y на фиг. 8.
Здесь передаточный элемент 20 с выходным колесом 14a рычага удален. Кроме того, не показан рычаг 10 со своим корпусом 10a, поэтому внутри рычага 10 видны функциональные элементы.
Из нижнего конца вала 12 привода рычага выступает нижний конец вала 18 привода держателя (выходной конец 18b на фиг. 13), на котором установлено без возможности поворота выходное колесо 19 держателя. Еще один передаточный элемент 20', который, как и передаточный элемент 20, представляет собой средство тяги из металлической ленты, охватывает выходное колесо 19 держателя на угол приблизительно 180° и при помощи крепежного устройства 21' жестко соединен с выходным колесом 19 держателя.
В своем дальнейшем прохождении внутри не показанного здесь корпуса 10a рычага 10 и в соответствии с его формой передаточный элемент 20' находится в контакте с направляющим роликом 23 и прижимным роликом 24 и охватывает с левой стороны, соответствующей шарниру 11a держателя рычага 10, приводное колесо 25 держателя на угол более 180°. Передаточный элемент 20' на приводном колесе 25 держателя закреплен при помощи крепежного устройства 21', также как на выходном колесе 19 держателя.
Приводное колесо 25 держателя соединено с валом 27 держателя без возможности поворота относительно вала 27 и может вращаться или поворачиваться с ним вокруг оси 11b держателя. Приводное колесо 25 держателя вместе с валом 27 держателя установлено с возможностью поворота в непоказанном подшипнике и соединено с удерживающей пластиной 26. Кроме того, на приводном колесе 25 держателя имеется своего рода заглушка 25a, образующая дополнительную опору для вала 27 держателя.
Направляющий ролик 23 при помощи крепежного элемента 23a закреплен на пластине 23b при помощи непоказанного подшипника, может вставляться в рычаг 10 с нижней стороны корпуса 10a и доступен, например, может крепиться, с верхней стороны. Сходным образом может монтироваться прижимной ролик 24, причем регулировочный элемент 24a выполнен эксцентрически, чтобы обеспечить возможность предварительного натяжения передаточного элемента 20' путем поворота регулировочного элемента 24a.
На фиг. 9 хорошо видно, что в приводном колесе 12a рычага, направляющем ролике 23 и прижимном ролике 24 имеются отверстия 22, с одной стороны снижающие вес, а с другой стороны предотвращающие загрязнение передаточного элемента 20, 20'. Возможная грязь переносится через отверстия 22 к внутренней стороне соответствующего колеса или ролика и, следовательно, наружу.
Благодаря креплению передаточных элементов 20, 20' на соответствующих колесах 14a, 12a, 19, 25 при помощи крепежных устройств 21, 21', возможен поворот на угол β поворота не более 180°, причем в результате этого одновременно образуется упор. Угол β поворота, например, лежит в пределах 160…165°.
Фиг. 10, представляющая собой вид в разрезе в плоскости x-y, иллюстрирует расположение передаточного элемента 20' вместе с колесами 19, 25 и роликами 23, 24. Кроме того, на этом чертеже показаны монтажные отверстия 10c на концах корпуса 10a рычага 10 с заглушками 28a монтажных отверстий. Направляющий ролик 23 и прижимной ролик 24 смещены относительно друг друга в продольном направлении рычага 10 так, что, несмотря на узкий корпус 10a, имеется достаточное пространство для обоих роликов 23, 24, в том числе пространство для натяжения передаточного элемента 20'.
При помощи линий XI-XI разреза (см. фиг. 10) на фиг. 11 показан схематичный вид в разрезе, чтобы дополнительно пояснить крепежные устройства 21, 21'. Фиг. 11a является схематичным изображением крепежного участка 20a, 20a' передаточного элемента 20, 20'. На фиг. 12 показано схематичное аксонометрическое изображение приводного/выходного колеса с передаточным элементом 20, 20'.
Крепежное устройство 21, 21' включает в себя крепежные элементы 21a, 21'a, например, так называемые призонные болты (DIN 609) с резьбой и центрирующими частями 21b, а также по меньшей мере один подвижный сухарь 30. В вертикальном направлении крепежные элементы 21a, 21'a z расположены параллельно оси вращения/поворота соответствующего колеса 12a, 14a, 19, 25 и проходят в радиальном направлении относительно колеса 12a, 14a, 19, 25, снаружи через подвижный сухарь 30 с отверстиями, крепежные отверстия 29 крепежных частей 20a, 20'a передаточного элемента 20, 20' и резьбовые отверстия колеса 12a, 14a, 19, 25.
При этом крепежные отверстия 29 в соответствующей крепежной части 20a, 20'а соответствующего передаточного элемента 20, 20' выполнены так, что в направлении z они образуют свое рода удлиненное отверстие длиной z1, причем в направлении x или в направлении вдоль окружности они имеют размер x1 с жестким допуском. Таким образом, в направлении x, т.е. в направлении тяги, крепежные отверстия 29 взаимодействуют с центрирующими частями 21b крепежных элементов 21a. В результате получают беззазорную передачу вращающего момента или угла поворота.
Подвижный сухарь 30 установлен параллельно оси соответствующего колеса 12a, 14a, 19, 25. Кроме того, в колесе 12a, 14a, 19, 25 может иметься аксиальный паз 31 (см. фиг. 12), поперечное сечение которого (например, трапецеидальное) соответствует поперечному сечению подвижного сухаря 30. Под подвижным сухарем 30 на одном из колес 12a, 14a, 19, 25 закреплены два конца передаточного элемента 20, 20' с их крепежными частями 20a, 20'a, тогда как на соединенном с ним противоположным колесом 12a, 14a, 19, 25 закреплена только одна крепежная часть 20a, 20'a.
Конечно, крепежные части 20a, 20'a могут проходить не параллельно оси колеса 12a, 14a, 19, 25, а, например, под углом, причем подвижный сухарь 30 может быть установлен соответствующим образом. Возможны и другие формы крепежных частей 20a, 20'a, например, зубчатые венцы, также с закругленными зубьями.
Кроме того, фиг. 12 иллюстрирует вариант осуществления колес 12a, 14a, 19, 25 или роликов 23, 24, причем колесо этого варианта имеет кольцевые канавки 22a, расположенные в осевом направлении. Как и отверстия 22, кольцевые канавки 22a предназначены для удаления возникающей грязи внутрь колес 12a, 14a, 19, 25 или роликов 23, 24, а затем - для выдавливания на внутреннем торце. Таким образом, слой грязи между колесами 12a, 14a, 19, 25 или роликами 23, 24 и передаточным элементом 20, 20'' почти исключен. Разумеется, колеса 12a, 14a, 19, 25 или ролики 23, 24 могут не иметь ни кольцевых канавок 22a, ни отверстий 22.
Показанное на фиг. 12 колесо 12a, 14a, 19, 25 имеет профиль для помещения в нем оси, благодаря этому возможет простой монтаж без возможности поворота. Конечно, возможны и другие профили. Кроме того, колесо 12a, 14a, 19, 25 в варианте осуществления согласно фиг. 12 имеет отверстия 33, проходящие параллельно оси колеса 12a, 14a, 19, 25 и предназначенные, с одной стороны, для снижения веса, а с другой - для удаления грязи.
Наконец, фиг. 13 представляет собой схематичное аксонометрическое покомпонентное изображение функциональных элементов предлагаемого рычажного механизма 6, выполненного согласно фиг. 8.
Кроме того, из фиг. 13 можно понять принцип сборки отдельных функциональных элементов. Например, крепежный элемент 23a и регулировочный элемент 24a вводят с верхней стороны рычага 10, тогда как соответствующие ролики 23, 24 устанавливают снизу.
Колеса 12a, 19, 25 крепят на соответствующих валах без возможности поворота в каждом случае при помощи крепежных элементов (например, 19a, 25b).
Рычаг 10 может представлять собой литую или сварную деталь. Возможен также разъемный корпус 10a. Здесь ясно видно монтажное отверстие 10c.
Приводной конец 27a вала 27 держателя установлен в подшипнике 27c. Выходной конец 27b вала проходит через еще один, нижний подшипник 27d, причем подшипник 27d устанавливают на предназначенной для этого, подробно не обозначенной части вала 27 держателя. Вал 27 держателя с подшипником 27c впереди вставляют в рычаг 10, причем благодаря стопорному кольцу 27e вал 27 закрепляют в осевом направлении в отверстии рычага 10. При этом стопорное кольцо 27e взаимодействует с наружным кольцом нижнего подшипника 27в. Более подробно это будет пояснено со ссылкой на фиг. 14.
При помощи монтажных отверстий 10c можно получить доступ к крепежным устройствам 21'.
Наружные диаметры колес 12a, 14a, 19, 25 выбирают так, что передаточный элемент 20, 20' остается в области упругих деформаций. Другими словами, необходимо учитывать соответствующие минимальные радиусы изгиба материала передаточных элементов 20, 20'.
Передаточные элементы 20, 20' представляют собой плоские стальные ленты из пружинной стали, например, из нержавеющей пружинной стали 1.4107.
Колеса 12a, 14a, 19, 25 и ролики 23, 24 могут быть выполнены из подходящего пластика, так как они не передают больших нагрузок, поскольку рычаг 10 удерживается при помощи вала 12 привода рычага с подшипниковым узлом 17, причем доильный аппарат 5 удерживается в рычаге 10 посредством держателя 11 при помощи вала 27 держателя и его подшипников 27c, 27d.
Фиг. 14 является разрезом шарнира 11a держателя в вертикальной плоскости. Подшипник 27c на приводном конце 27a вала держателя помещен в соответствующее гнездо 10d. Стопорное кольцо 27a вставлено в канавку в отверстии корпуса 10a (подробно не показано) и стопорит нижний подшипник 27d в осевом направлении и, таким образом, фиксирует вал 27 держателя с установленным на нем приводным колесом 25 держателя. Приводное колесо 25 держателя соединено без возможности поворота с валом 27 держателя при помощи крепежных элементов 25b, например, винтов или заклепок.
Выходной конец 27b вала 27 держателя способом, который подробно не показан, соединен без возможности поворота с подробно не показанным соединительным устройством 11c держателя. На соединительном устройстве 11c держателя установлен держатель 11 способом, который подробно не показан, например, при помощи винтов, схематично показанных на фиг. 14.
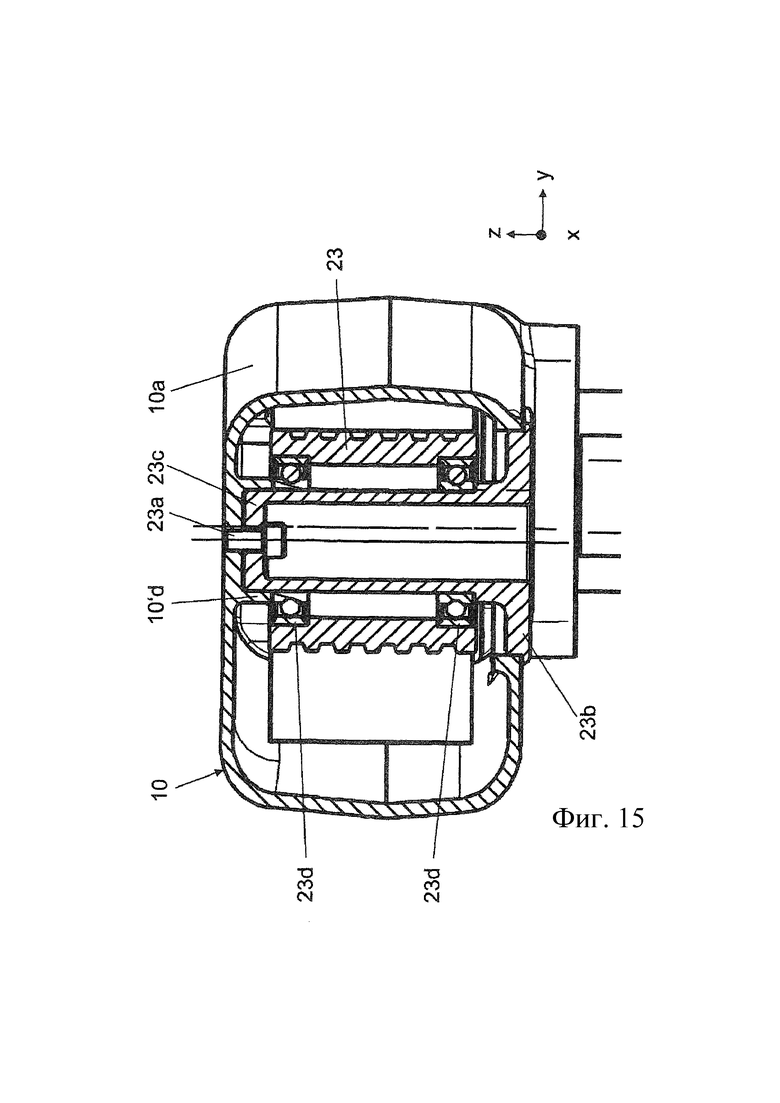
На фиг. 15 показан вид в разрезе установленного прижимного ролика 23. Плоскость разреза лежит в вертикальной плоскости. Здесь в противоположность фиг. 8 и 9, показан вариант установки направляющего ролика 23. Направляющий ролик 23 при помощи двух подшипников 23d установлен на цапфе 23c с возможностью поворота вокруг оси, расположенной в вертикальном направлении z. При этом верхний конец цапфы 23c помещен в соответствующее гнездо 10'd и при помощи крепежного элемента 23a (который в данном случае доступен снизу) прикреплен к верхней внутренней стороне корпуса 10a. Нижний конец цапфы 23c выполнен с пластиной 23b.
Сравнительно тяжелые двигатели узла 9 привода и/или соответствующие передачи, а именно привод 14 рычага, привод 15 держателя и вертикальный привод 16, установлены в раме 90. Кроме того, в раме 90 также установлен вал 12 привода рычага и вал 18 привода держателя с соответствующим подшипниковым узлом 17. Все это устройство встроено в среднюю часть 4g перегородки 4 и, таким образом, образует основу для подвижного рычага 10 и установленного на нем с возможностью перемещения держателя 11 с доильным аппаратом 5. Таким образом, сравнительно тяжелые двигатели и/или передачи расположены не на/в рычаге 10 или на/в держателе 11 или соответствующих передачах 12b, 11a, а в этой основе. Отсюда следует, что вес рычага 10 и держателя 11 существенно уменьшен по сравнению с рычажными механизмами, содержащими интегрированные двигатели и передачи. Другими словами, при эксплуатации рычаг 10 и держатель 11 передают лишь незначительную кинетическую энергию в плоскостях x-y (в направлении z происходят только медленные движения с пониженной точностью). Это, в свою очередь обеспечивает преимущество, состоящее в том, что, что дояр и автоматический рычажный механизм 6 с доильным аппаратом 5 в процессе дойки (позиционирование, установка, дойка, возможная повторная установка, снятие) могут одновременно работать с доимым животным. Таким образом, специальная защищенная зона не требуется. Кроме того, упрощается управление рычажным механизмом в плоскостях x-y, так как благодаря пониженной инерционности рычажный механизм имеет значительно меньшую задержку по времени и требует меньших ускоряющих сил.
Таким образом, рычажный механизм 6 вместе с передаточными элементами 20, 20' позволяет достичь следующих особых преимуществ:
- весьма небольшие допуски, даже после длительного срока службы;
- отсутствует упругость элементов;
- в плоскостях x-y рычажный механизм 6 передает лишь незначительную кинетическую энергию, так как тяжелые двигатели и/или передачи не установлены в шарнире 12b рычага и шарнире 11a держателя;
- вследствие незначительной кинетической энергии человек/дояр и робот в процессе доения могут одновременно работать у доимого животного (у коровы). Защищенная зона не требуется;
- почти отсутствует пластическая деформация средств тяги/передаточных элементов 20, 20' (это особенно важно для легкости хода, ручной установки доильных стаканов 5a, отслеживания движущегося животного), причем под пластической деформацией следует понимать деформацию средства передачи, например, вследствие таких механических воздействий, как сминание, сжатие, растягивание;
- нечувствительность к колебаниям температуры;
- лишь незначительные движущиеся массы в центральной точке инструмента (TCP) (в частности при применении направляющих роликов из пластмассы), в результате получают лучшую и более быструю регулируемость;
- пружинная стальная лента не является изнашиваемой частью;
- отсутствует полигональный эффект (как в случае шатунов, цепей, зубчатых ремней), в результате обеспечивается более простая и быстрая регулируемость;
- не требуются большие силы предварительного натяжения, в результате на опорных участках образуются меньшие силы;
- экономия в весе за счет применения пластика в качестве материала для многих элементов (колес и роликов);
- почти полное отсутствие зазора, вследствие этого - простая позиционируемость доильного аппарата в обратном направлении при съеме/отрыве/падении;
- пониженная опасность травмирования доимых животных.
Изобретение не ограничивается представленными примерами, его можно модифицировать в рамках прилагаемой формулы изобретения.
Передаточные элементы 20, 20' могут быть выполнены при помощи металлической ленты лишь частично, причем участки между колесами 12a, 14a, 19, 25 могут иметь металлическую ленту, а участки, охватывающие колеса 12a, 14a, 19, 25 и, кроме того, имеющие определенную гибкость, могут состоять из ткани. Другими словами, передаточные элементы 20, 20' могут быть частично гибкими.
Кроме того, передаточные элементы 20, 20' могут иметь канатные волокна, причем в отношении отсутствия зазора и износостойкости эти волокна могут иметь такие же свойства, что и металлическая лента.
Например, дополнительно для удаления грязи могут быть использованы скребки, взаимодействующие с передаточным элементом 20, 20' в соответствующем месте.
Каждый доильный станок 3 может иметь устройство для кормления.
Естественно, доильный аппарат может применяться также для дойных животных, имеющих вымя с различным числом сосков, например, 2, 3 или 4.
Доильное устройство 1 в виде доильной карусели может быть выполнено так, что в случае необходимости для доения определенного животного также может последовать несколько поворотов на 360°. В этом случае, если животное доходит до выхода 8, выход животного из доильного станка 3 предотвращается.
Кроме того, рычажный механизм 6 вместе с передаточными элементами 20, 20' может применяться в других роботизированных устройствах.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1, 1', 1'' доильная установка
2 точка поворота
3 доильный станок
3a, 3b ворота
4 перегородка
4a, 4b стойки
4c горизонтальная штанга
4d кожух
4e гнездо
4f задняя часть
4g средняя часть
4h передняя часть
5 доильный аппарат
5a доильный стакан
5b кронштейн доильного аппарата
6 рычажный механизм
7 вход
8 выход
9 узел привода
10 рычаг
10a корпус
10b нижняя часть корпуса
10c монтажное отверстие
10d, 10'd гнездо
11 держатель
11a шарнир держателя
11b ось держателя
11c крепежное устройство держателя
12 вал привода рычага
12a приводное колесо рычага
12b шарнир рычага
12c крепление рычага
12d крепежный элемент
12e втулка
12f ось рычага
13 датчик положения
14 привод рычага
14a выходное колесо рычага
14b выходная ось рычага
15 привод держателя
16 вертикальный привод
17 подшипниковый узел
17a, 17b подшипник
18 вал привода держателя
18a приводной конец
18b выходной конец
18c муфта держателя
18d, 18e подшипник
19 выходное колесо держателя
19a крепежный элемент
20, 20' передаточный элемент
20a, 20'a крепежная часть
21, 21' крепежное устройство
21a, 21'a крепежный элемент
21b центрирующая часть
22 отверстие
22a кольцевая канавка
23 направляющий ролик
23a крепежный элемент
23b пластина
23c цапфа
23d подшипник
24 прижимной ролик
24a регулировочный элемент
24b пластина
25 приводное колесо держателя
25a заглушка
25b крепежный элемент
26 удерживающая пластина
27 вал держателя
27a приводной конец
27b выходной конец
27c, 27d подшипник
27e стопорное кольцо
28 крышка
28a заглушка монтажного отверстия
29 крепежное отверстие
30 подвижный сухарь
31 аксиальный паз
32 профиль
33 отверстие
90 рама
90a, 90b несущий элемент
91, 91a вертикальная направляющая опора
92, 92a вертикальный направляющий элемент
α зона установки
β угол поворота
G, G' траншея
KS головная сторона
HS задняя сторона
M дояр
T животное
x, y координаты
z вертикальное направление
| название | год | авторы | номер документа |
|---|---|---|---|
| РЫЧАЖНЫЙ МЕХАНИЗМ ДЛЯ ДОИЛЬНОЙ УСТАНОВКИ ДЛЯ АВТОМАТИЧЕСКОГО ДОЕНИЯ ДОЙНЫХ ЖИВОТНЫХ, ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2015 |
|
RU2650392C9 |
| ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2013 |
|
RU2590818C2 |
| ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2013 |
|
RU2587563C9 |
| ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2013 |
|
RU2742310C2 |
| ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2013 |
|
RU2587561C2 |
| ДОИЛЬНАЯ УСТАНОВКА С ВНУТРЕННИМ РОБОТИЗИРОВАННЫМ УСТРОЙСТВОМ | 2013 |
|
RU2578613C1 |
| БЛОКИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ДОИЛЬНОЙ КАРУСЕЛИ | 2009 |
|
RU2471342C2 |
| ДОИЛЬНЫЙ АППАРАТ И ДОИЛЬНАЯ УСТАНОВКА, СНАБЖЕННАЯ ТАКИМ ДОИЛЬНЫМ АППАРАТОМ | 2011 |
|
RU2556039C2 |
| Манипулятор доильной установки с управляемым режимом доения по четвертям вымени коровы | 2019 |
|
RU2715859C1 |
| Доильная установка | 1989 |
|
SU1701198A1 |
Группа изобретений относится к оборудованию для машинного или автоматического доения дойных животных. Рычажный механизм c присоединенным к нему узлом привода для доильной установки для автоматического доения дойных животных содержит рычаг и соединенный с ним с возможностью поворота держатель с доильным аппаратом. Рычаг соединен с валом привода рычага и установлен с возможностью поворота вокруг оси рычага, при этом в валу привода рычага установлен вал привода держателя с обеспечением возможности его поворота независимо от вала привода рычага. Вал привода рычага и вал привода держателя соединены с узлом привода, при этом рычажный механизм имеет по меньшей мере один передаточный элемент в качестве средства тяги для передачи вращательных или поворотных движений. Узел привода имеет привод рычага для поворота рычага, привод держателя для поворота держателя и вертикальный привод для перемещения рычажного механизма в вертикальном направлении, причем привод рычага, привод держателя и вертикальный привод установлены в раме, выполненной с возможностью перемещения в вертикальном направлении. Увеличивается производительность доильной установки. 3 н. и 16 з.п. ф-лы, 15 ил.
1. Рычажный механизм (6) c присоединенным к нему узлом (9) привода для доильной установки (1, 1', 1'') автоматического доения дойных животных (T), содержащий рычаг (10) и держатель (11), соединенный с ним с возможностью поворота и имеющий доильный аппарат (5), причем рычаг (10) соединен с валом (12) привода рычага и установлен с возможностью поворота вокруг оси (12f) рычага, при этом в валу (12) привода рычага установлен вал (18) привода держателя с обеспечением возможности его поворота независимо от вала (12) привода рычага, причем вал (12) привода рычага и вал (18) привода держателя соединены с узлом (9) привода, при этом рычажный механизм (6) имеет по меньшей мере один передаточный элемент (20, 20') в качестве средства тяги для передачи вращательных или поворотных движений, отличающийся тем, что узел (9) привода имеет привод (14) рычага для поворота рычага (10), привод (15) держателя для поворота держателя (11) и вертикальный привод (16) для перемещения рычажного механизма (6) в вертикальном направлении, причем привод (14) рычага, привод (15) держателя и вертикальный привод (16) установлены в раме (90), выполненной с возможностью перемещения в вертикальном направлении.
2. Рычажный механизм (6) по п. 1, отличающийся тем, что привод (14) рычага, привод (15) держателя и вертикальный привод (16) узла (9) привода, включая соответствующие передачи и подшипниковый узел (17) вала (12) привода рычага и вала (18) привода держателя, образуют общую основу рычажного механизма (6) в раме (90).
3. Рычажный механизм (6) по п. 2, отличающийся тем, что вертикальный привод (16) выполнен с возможностью перемещения рамы (90) в вертикальном направлении.
4. Рычажный механизм (6) по п. 3, отличающийся тем, что при помощи вертикальных направляющих опор (91, 91a) на обеих продольных сторонах рама (90), выполненная с возможностью перемещения в вертикальном направлении, может направляться в вертикальном направлении на соответствующем вертикальном направляющем элементе (92, 92а) на перегородке (4) соответствующей доильной установки (1, 1', 1'').
5. Рычажный механизм (6) по п. 4, отличающийся тем, что привод (14) рычага и привод (15) держателя закреплены рядом друг с другом на несущем элементе (90а) в раме (90), причем привод (15) держателя установлен на первом подшипнике (17а) подшипникового узла (17), при этом второй подшипник (17b) подшипникового узла (17) установлен ниже на еще одном несущем элементе (90b) рамы (90).
6. Рычажный механизм (6) по п. 5, отличающийся тем, что вал (12) привода рычага установлен в первом подшипнике (17a) и втором подшипнике (17b) подшипникового узла (17) с возможностью поворота вокруг вертикального направления и проходит в вертикальном направлении.
7. Рычажный механизм (6) по п. 6, отличающийся тем, что под верхним несущим элементом (90a) вал (12) привода рычага соединен, при помощи передаточного элемента, (20) с выходом привода (14) рычага, причем нижний конец вала (12) привода рычага соединен с концом рычага (10).
8. Рычажный механизм (6) по п. 7, отличающийся тем, что привод (14) рычага выполнен с возможностью регулировки в продольном направлении несущего элемента (90a) при помощи натяжного устройства для натяжения передаточного элемента (20).
9. Рычажный механизм (6) по п. 8, отличающийся тем, что внутри вала (12) привода рычага, выполненного в виде полого вала, вал (18) привода держателя расположен концентрически относительно вала (12) привода с возможностью вращения вокруг вертикального направления вокруг оси (12f) рычага, причем вал (18) привода выполнен с возможностью вращения независимо от вала (12) привода рычага, и над первым подшипником (17a) вал (18) привода держателя соединен с выходом привода (15) держателя.
10. Рычажный механизм (6) по п. 9, отличающийся тем, что указанный по меньшей мере один передаточный элемент (20, 20') в каждом случае жестко соединен с соответствующими колесами (12a и 14a; 19 и 25), с которыми он находится во взаимодействии для передачи вращательных или поворотных движений.
11. Рычажный механизм (6) по п. 10, отличающийся тем, что указанный по меньшей мере один передаточный элемент (20, 20') содержит металлическую ленту.
12. Рычажный механизм (6) по любому из пп. 1-11, отличающийся тем, что на рычаге (10) или в рычаге (10) расположен по меньшей мере один передаточный элемент (20') для передачи вращательных или поворотных движений на держатель (11).
13. Перегородка (4) доильной установки (1, 1', 1'') для по меньшей мере одного доильного станка (3) доения дойных животных (T), причем перегородка (4) расположена на продольной стороне доильного станка (3), содержащая узел (9) привода и соединенный с ним рычажный механизм (6), который содержит рычаг (10) и соединенный с ним с возможностью поворота держатель (11) с доильным аппаратом (5) и выполнен с возможностью перемещения из исходного положения в рабочее положение и обратно, при этом в исходном положении рычажный механизм (6) с доильным аппаратом (5) расположен в перегородке (4), а в рабочем положении может перемещаться в боковом направлении к одному из доимых животных (T), между его передними и задними ногами, отличающаяся тем, что рычажный механизм (6) c присоединенным к нему узлом (9) привода выполнен по любому из пп. 1-12.
14. Перегородка (4) по п.13, отличающаяся тем, что рычажный механизм (6) выполнен с возможностью перемещения в полностью автоматическом режиме из исходного положения в рабочем положении в положение установки для автоматической установки доильного аппарата (5) на соски доимого животного (T), причем доильный аппарат (5) имеет по меньшей мере один датчик (13) положения.
15. Перегородка (4) по п. 13, отличающаяся тем, что рычажный механизм (6) выполнен с возможностью перемещения в полуавтоматическом режиме из исходного положения в рабочее положение, причем рабочее положение представляет собой фиксированное предварительное положение, предварительно задаваемое упорами, причем доильный аппарат (5) в предварительном положении находится в удобном для дояра положении.
16. Перегородка (4) по любому из пп. 13-15, отличающаяся тем, что узел (9) привода с приводом (14) рычага, приводом (15) держателя и вертикальным приводом (16), включая соответствующие передачи и подшипниковый узел (17) вала (12) привода рычага и вала (18) привода держателя, образуют общую основу рычажного механизма (6) в раме (90), причем рама (90) при помощи вертикальных направляющих опор (91, 91a) на ее обеих продольных сторонах направлена с возможностью перемещения в вертикальном направлении на соответствующем вертикальном направляющем элементе (92, 92а) и расположена в средней части (4g) перегородки (4).
17. Доильная установка (1, 1', 1'') для доения дойных животных, содержащая по меньшей мере одну перегородку (4) по любому из пп. 13-16.
18. Доильная установка (1, 1', 1'') по п. 17, отличающаяся наличием доильной карусели.
19. Доильная установка (1, 1', 1'') по п. 18, отличающаяся тем, что доильная карусель представляет собой доильную карусель с доением снаружи.
| WO 2013135842 A1, 19.09.2013 | |||
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО СНЯТИЯ ДОИЛЬНОГО АППАРАТА | 1992 |
|
RU2095973C1 |
| ДОИЛЬНЫЙ АППАРАТ | 2012 |
|
RU2493696C1 |
| JP 2002084906 A, 26.03.2002. | |||

