ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее описание относится к области физиотерапевтических устройств и, в частности к устройству для динамической физиотерапии, более конкретно к устройству для динамической физиотерапии головы, шеи и/или плеч. В другом аспекте настоящее описание касается определения положения и/или смещения части тела.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В физиотерапии, в частности, в ортопедической физиотерапии, существует различие между активными терапиями и пассивными терапиями. При активной терапии заданные движения выполняются пациентом во время сеансов тренировки и обучения. При пассивной или оказываемой терапии пациента лечат, манипулируя одной или более частями тела. Различают два различных вида применяемого лечения: статические терапии и динамические терапии.
При статической терапии часть тела пациента приводится в заданное положение и заданная сила прикладывается к части тела в течение заданного времени, чтобы поддерживать часть тела в таком положении. Такое статическое лечение облегчает использование устройства для обеспечения регулируемой заданной силы (по величине и направлению) в течение необходимого периода времени. Например, имеются различные вытягивающие устройства, которые могут быть выполнены в виде простого шкива. Более сложное робототехническое вытягивающее устройство раскрыто в документе DE 20 2008015138.
При динамической терапии подвергаемой лечению частью тела маневрируют по заданной траектории, обычно с заданной скоростью и/или усилием. Это требует деликатного управления движением, чтобы не причинять боль или не наносить вред пациенту. Маневрирование частью тела означает перемещение, непрерывное или периодическое, части тела внешними силами, например, другим человеком, таким как врач.
Для применения динамической терапии к голове и шее пациента согласно различным способам документ WO 2008/059497 раскрывает устройство для лечения тела пациента или его органа, в частности, его головы и шеи, посредством управляемого маневрирования подвергаемым лечению органом, содержащее: опорную подушку, приспособленную для устойчивого и удобного удержания подвергаемого лечению органа; и маневренную платформу, на которую опирается подушка, включающую средство маневрирования, приспособленное для вращения платформы в сагиттальной, корональной, горизонтальной плоскостях или в любой комбинации этих плоскостей в течение заданного периода времени; причем маневрирование упомянутым органом характеризуется параметрами, выбираемыми из набора допустимых перемещений, который определен в документе, при этом продолжительность движения во всех случаях составляет приблизительно до 90 секунд.
Вследствие структуры сустава, который лечится, и/или вследствие ограничений пациента (по гибкости, болезням, болям и т.д.) траектория терапевтического маневрирования может быть сложной. Это в частности имеет место для перемещения головы, шеи и плеч, которое включает изменение и перемещение центров вращения и/или относительных поступательных перемещений. Чтобы сделать возможным лечение шеи, раскрытое в документе WO 2008/059497 устройство полагается на последовательное соединение двигателей, а также на биологическую обратную связь (напряжение мышц и т.д.), таким образом устройство страдает от большого размера и сложности, а также от накопления погрешностей в позиции и ориентации от одного двигателя к следующему, уменьшающего точность положения и ориентации подушки. Кроме того, такое устройство имеет тенденцию быть дорогим и может быть отпугивающим для пациентов, препятствуя их расслаблению во время лечения, что уменьшает его эффективность.
Целью настоящего описания является создание улучшенного устройства для осуществления динамически применяемого физиотерапевтического лечения. Другой целью является создание устройства для улучшения определения пространственного положения, ориентации части тела и определения смещения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно первому аспекту предлагается устройство, выполненное с возможностью лечения части тела пациента. Устройство содержит опору по меньшей мере для частичной поддержки и удержания части тела и соединенный с опорой манипулятор для поддержания опоры и маневрирования ею.
Манипулятор содержит механизм с параллельными связями, такой как - двойная тренога, пентапод или платформа Стюарта либо гексапод, который обеспечивает лучшую точность и намного более высокую жесткость для данной конструктивной массы, чем механизм с последовательными связями, и наоборот, который может иметь уменьшенную массу для данной желаемой жесткости. Уменьшенная масса приводит к снижению потребляемой мощности и повышению точности при манипуляции и маневрировании. Манипулятор, обеспечивающий управляемое позиционирование опоры с шестью степенями свободы (три взаимно перпендикулярных направления поступательного перемещения (X, Y, Z) и три вращательных перемещения вокруг направлений поступательного перемещения (вращения, наклона, поворота в горизонтальной плоскости)), позволяет выполнять сложные движения и траектории с помощью опоры. Телесный угол, составленный плоскими углами (θ, ϕ, ρ) во взаимно перпендикулярных направлениях приблизительно (45°, 45°, 45°), делает возможным доступ к диапазону движения головы нормального, здорового человека и человека без боли приблизительно 90 лет и позволяет предотвращать асимметричное лечение. Поступательные степени свободы позволяют учитывать изменения и перемещения центров вращения и/или относительные поступательные перемещения при движении шеи.
В предпочтительном варианте выполнения устройства (механизм с параллельными связями) манипулятор содержит платформу Стюарта, имеющую шесть линейных приводов, соединенных с двумя опорными элементами через шарниры. Платформа Стюарта может занимать малый объем относительно своего достижимого диапазона движения. Кроме того, платформы Стюарта в целом надежны и обеспечивают небольшую вероятность кинематических особых точек, то есть точек, в которых положение, движение и/или направление двух элементов опоры друг относительно друга определены неоднозначно или где степень движения стала недостижимой или "вытесненной", например, в состоянии, известном как складывание рамок карданного подвеса. Платформа Стюарта может быть разработана даже так, чтобы быть по существу свободной от особых точек. Таким образом, увеличивается безопасность устройства.
Один или более шарниров, предпочтительно, все шарниры устройства с параллельными связями могут быть выполнены в виде магнитного шарового соединения. Это уменьшает число частей и уменьшает трение и техническое обслуживание по сравнению с двуосными универсальными соединениями (карданными соединениями). Магнитное шаровое соединение также не содержит корпус для удержания шара немагнитного шарового соединения, что также уменьшает трение и количество частей. Кроме того, диапазон движения соединения и таким образом манипулятора увеличивается, облегчая достижение телесного угла, составленного плоскими углами (θ, ϕ, ρ) во взаимно перпендикулярных направлениях приблизительно (45°, 45°, 45°), описанного выше. Магнитное шаровое соединение может быть охвачено по меньшей мере частично гибкой трубой, чтобы способствовать предотвращению разъединения соединения.
Один или более шарниров, предпочтительно все шарниры, механизма с параллельными связями могут быть выполнены в виде гибкого соединения (tendon joint). В данном тексте гибким соединением является любой тип соединения, в котором два объекта подвижно связаны третьим гибким элементом, который является гибким по меньшей мере в двух перпендикулярных направлениях, таким как стержень или труба из пластмассы, естественного и/или синтетического каучука, спиральная пружина или пружина другого типа, часть троса, например, стального троса и т.д. Как правило, гибкость гибкого соединения является такой, что в ослабленном и ненагруженном состоянии гибкий элемент ориентирован по существу прямо, подобно штоку, штанге или стержню, без провисания вниз под своим собственным весом в горизонтальном положении. Гибкие соединения могут допускать диапазон движения в обширном телесном угле, облегчая достижение телесного угла, описанного выше. Диапазон движения гибкого соединения может быть определен выбором материала, диаметра, длины и/или формы соединения, например, от по существу цилиндрического стержня до стержня по существу в форме песочных часов. Гибкое соединение обеспечивает прямое соединение между частями шарнира, соединенными этим соединением, предотвращая разъединение соединения. Резиновые универсальные соединения и спиральные пружины с разнообразными характеристиками имеются на рынке, в общем, по значительно более низкой цене, чем карданные соединения или (магнитные) шаровые соединения.
Магнитные шаровые соединения и в особенности гибкие соединения требуют наличия небольшого корпуса, вплоть до полного отсутствия корпуса, для присоединения и, таким образом, могут занимать небольшой объем. Таким образом, шарниры манипулятора могут располагаться близко друг к другу. Это увеличивает свободу движения манипулятора.
Было найдено, что механизм с параллельными связями, в частности, платформа Стюарта, содержащая множество соединенных шарнирами линейных приводов с карданными универсальными соединениями или немагнитными шаровыми соединениями, обычно имеет диапазон движения в телесном угле, который ограничен приблизительно 30 градусам в направлении вращения (вращения, наклона, поворота в горизонтальной плоскости), и который может ограничивать диапазон поступательного движения. Чтобы уменьшить вероятность особенных точек такого механизма, в частности, в случае платформ Стюарта, одно или более карданных универсальных соединений могут быть жестко прикреплены к базе или платформе. Однако это уменьшает диапазон движения устройства и может воздействовать на симметрию оставшегося диапазона движения. При использовании магнитных шаровых соединений и/или гибких соединений диапазон вращательного движения (вращения, наклона, поворота в горизонтальной плоскости) устройства, в частности, платформы Стюарта, а также диапазон поступательного движения может быть значительно увеличен для одинаковых приводов. Улучшенное терапевтическое устройство, раскрытое в данном тексте, иллюстрирует это.
Чтобы использовать одно или более из описанных выше преимуществ в существующей платформе Стюарта или любом механизме с параллельными связями, он может быть улучшен модификацией путем замены одного или более из существующих его шарниров гибкими соединениями.
Эластичный шарнир, в частности эластичное гибкое соединение, обеспечивает восстанавливающую силу для манипулятора, помогающую восстанавливать заданное по умолчанию положение. Кроме того, он может функционировать как амортизатор и может уменьшать толчки манипулятора (толчок 1 является производной по времени от ускорения a или, эквивалентно, второй производной от скорости v и третьей производной от положения s: i=da/dt=d2 v/dt2=d3 s/dt3). Таким образом обеспечивается более плавное движение объекта, поддерживаемого манипулятором, следовательно, более плавное движение части тела. Такое преимущество не зависит от степени поступательной или вращательной подвижности и/или диапазона движения манипулятора и, следовательно, устройства, содержащего манипулятор.
Преимущества гибкого соединения, в частности, эластичного гибкого соединения, для механизма с параллельными связями с линейными приводными механизмами могут принести пользу другим механизмам с параллельными связями, которые используют их.
Резиновые гибкие соединения с разнообразными характеристиками имеются на рынке обычно по значительно более низкой цене, чем карданные соединения или (магнитные) шаровые соединения.
В случае настоящего устройства, включающего эластичные гибкие соединения, перемещения (части тела) пациента могут быть компенсированы до некоторой степени, определяемой упругостью соединения. Пациент может таким образом сопротивляться до некоторой степени задаваемой амплитуде перемещения опоры. Комфорт и безопасность (чувство безопасности) у пациентов поэтому значительно увеличиваются.
По меньшей мере один из упомянутых линейных приводов может включать по меньшей мере один привод с ходовым винтом. Привод с ходовым винтом может иметь легкий вес и обеспечивать большой ход привода по сравнению с гидравлическим или пневматическим цилиндром равного усилия и равной длины при минимальном удлинении. Кроме того, ходовой винт является самотормозящимся, таким образом увеличивается безопасность устройства. Далее, привод с ходовым винтом может иметь небольшой диаметр относительно своего усилия по сравнению с другими типами приводов, позволяя близкое размещение приводов, которое обеспечивает преимущество в степени подвижности манипулятора.
Устройство может содержать серводвигатель и/или шаговый двигатель для приведения в действие одного или более упомянутых линейных приводов точно и надежно. Серводвигатели или шаговые двигатели обычно надежны для задания и абсолютных и относительных регулировок.
Серводвигатель и/или шаговый двигатель в сочетании с приводом с ходовой винтом позволяют обеспечить постоянную точность по всему ходу привода, а также работу с высокой скоростью. Это позволяет выполнение перемещений для сложных траекторий. С помощью выбора шага резьбы ходового винта и размера шага двигателя обеспечивается точность позиционирования привода, и, следовательно, точность положения и ориентации устройства.
Для улучшения надежного задания перемещений одной части тела относительно второй части тела устройство может дополнительно включать - вторую опору для поддержания, такую как подставка, стул, кушетка или кровать, для поддержания неподвижной другой части тела.
Физиотерапевтическое устройство может содержать первую часть и вторую часть: первая часть содержит множество источников для излучения сигнала, а вторая часть содержит множество детекторов для обнаружения по меньшей мере части сигнала. Каждый сигнал, излучаемый источником и обнаруживаемый детектором, имеет время прохождения сигнала между соответствующим источником и детектором. Устройство, содержащее контроллер, выполненный с возможностью определения множества времен прохождения сигнала между по меньшей мере некоторыми из источников и по меньшей мере некоторыми из детекторов, позволяет определять, преимущественно с помощью контроллера, на основе определяемого множества времен прохождения сигнала, пространственное положение и ориентацию первой и второй частей относительно друг друга.
Первая часть может включать опору, а второй частью устройства может быть вторая опора или другой объект. Предпочтительно, первая часть устройства включает объект, который является легко присоединяемым к части тела, например, пригодным для надевания на нее, таким как шлем, оправа очков, головная повязка, браслет и т.д. Это позволяет определять положение и перемещение части тела независимо от положения опоры и/или манипулятора относительно части тела, например, во время маневрирования частью тела врачом.
Предпочтительно, сигнал является ультразвуковым сигналом, это уменьшает электромагнитные помехи, и он не замечается людьми.
Кроме того, источник может быть выполнен с возможностью одновременного излучения первого сигнала и второго сигнала; первый сигнал является относительно медленным сигналом, предпочтительно ультразвуковым сигналом, а второй сигнал является относительно быстрым сигналом, например, электрическим, рентгенографическим и/или оптическим сигналом. Если время прохождения для второго сигнала незначительно по сравнению с первым сигналом, то второй сигнал может эффективно использоваться для запуска измерения времени прохождения первого сигнала. Это облегчает измерение и сбор данных.
Чтобы осуществлять запись по меньшей мере части последовательности маневрирования или траектории, устройство может быть выполнено с возможностью хранения в запоминающем устройстве множества определяемых пространственных положений и ориентации первой и второй частей друг относительно друга. Кроме того, отметки времени, соответствующие по меньшей мере некоторым из определяемых пространственных положений и ориентации, могут сохраняться для обеспечения информацией о скорости и ускорении.
Запоминающее устройство может быть встроенным в устройство, быть сменным и/или удаленным, например, диском, твердотельным устройством хранения данных и/или удаленным компьютером.
Устройство может далее включать контроллер, выполненный с возможностью считывания по меньшей мере части информации, хранящейся в запоминающем устройстве, чтобы определять по меньшей мере первую последовательность маневрирования частью тела как функцию информации, хранящейся в запоминающем устройстве, и с возможностью управления устройством для приведения в действие по меньшей мере части манипулятора, например, одного или более приводов для маневрирования опорой таким образом, чтобы часть тела, когда она должным образом позиционирована на опоре и возможно удерживается ею, выполняла маневры согласно по меньшей мере первой последовательности маневрирования.
Это позволяет выполнить воссоздание зарегистрированной траектории, в частности траектории собственно части тела.
В еще одном аспекте предлагается способ для определения пространственного положения и ориентации первого объекта относительно второго объекта; первый объект содержит множество источников ультразвуковых сигналов, а второй объект содержит множество детекторов ультразвуковых сигналов для обнаружения сигналов от источников сигналов. Способ включает шаги излучения сигнала по меньшей мере от одного источника из множества источников сигналов и обнаружения сигнала по меньшей мере одним детектором из множества детекторов сигналов так, что каждый сигнал, излучаемый от одного из источников и принимаемый одним из детекторов, имеет время прохождения сигнала между соответствующим источником и детектором; определение множества времен прохождения заданного сигнала от одного источника в многочисленные детекторы и/или заданного сигнала от многочисленных источников в один детектор; определение, на основе определенных многочисленных времен прохождения. сигнала, по меньшей мере одного из положения одного источника относительно многочисленных детекторов, и соответственно положения одного детектора относительно многочисленных источников; и повторение шагов способа излучения и обнаружения сигнала, определения времен прохождения сигнала и определения относительных положений с различными комбинациями источников и детекторов, и определения из определяемых относительных положений пространственного положения и ориентации первого и второго объектов друг относительно друга.
С помощью упомянутого способа положение и ориентация первого и второго объектов друг относительно друга легко и надежно определяются с использованием триангуляции с множеством положений. Один источник и три детектора или три источника и один детектор достаточны для определения относительных положений двух объектов. Используя три источника и три детектора, относительное положение и ориентация трехмерных объектов могут быть однозначно определены с помощью минимального числа источников и детекторов.
Повторением шагов способа и сохранением в запоминающем устройстве определенных пространственных положений и ориентации первого и второго объектов друг относительно друга может быть записана траектория первого и второго объектов относительно друг друга. Кроме того, отметки времени, соответствующие по меньшей мере некоторым из определенных пространственных положений и ориентации, могут быть сохранены для предоставления информации о скорости и ускорении для траектории.
В случае если первый или второй объект представляют собой твердое неподвижное тело, например, строительную конструкцию, такую как стена, этот объект может соответственно служить в качестве базы отсчета.
Вышеописанные аспекты ниже объясняются с приведением дополнительных подробностей и преимуществ со ссылкой на чертежи, на которых в качестве примера показаны варианты осуществления изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
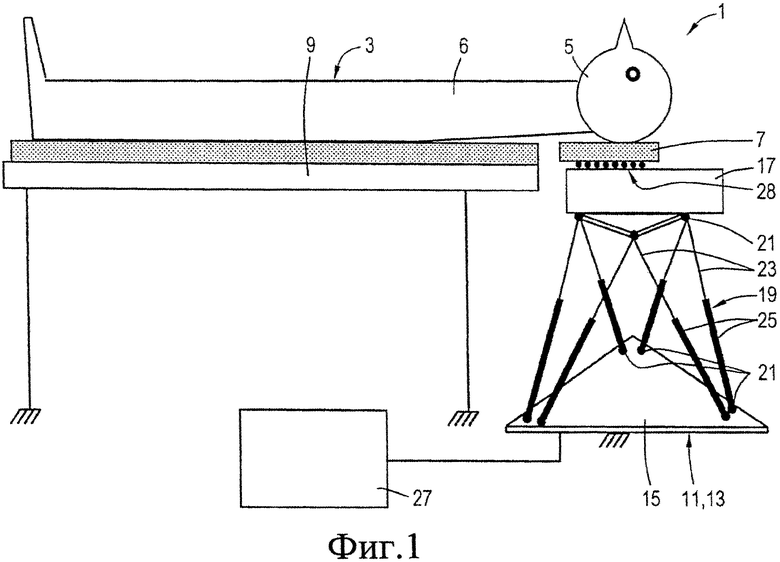
Фиг.1 поясняет устройство для лечения головы пациента.
Фиг.2А-4С поясняют основные движения человеческой головы.
Фиг.5 показывает альтернативный вариант осуществления устройства для лечения головы пациента.
Фиг.6 и 7 поясняют использование устройства, изображенного на фиг.5.
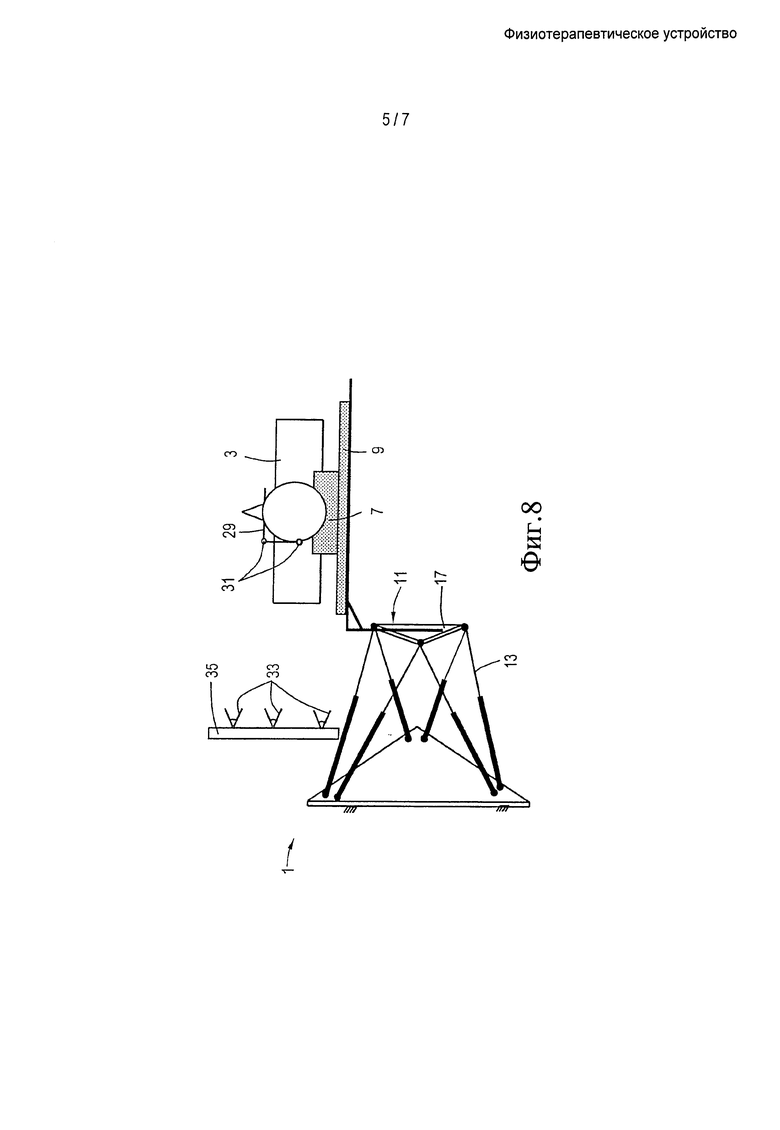
Фиг.8 поясняет пример варианта осуществления устройства для лечения головы пациента.
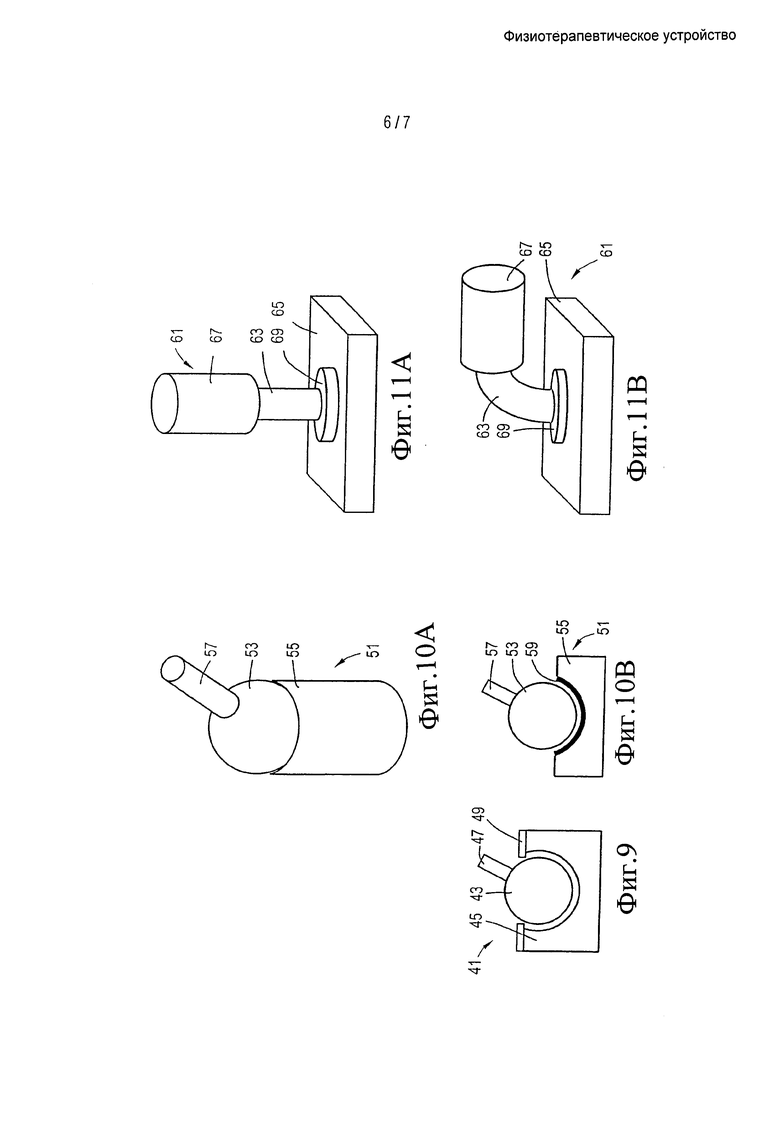
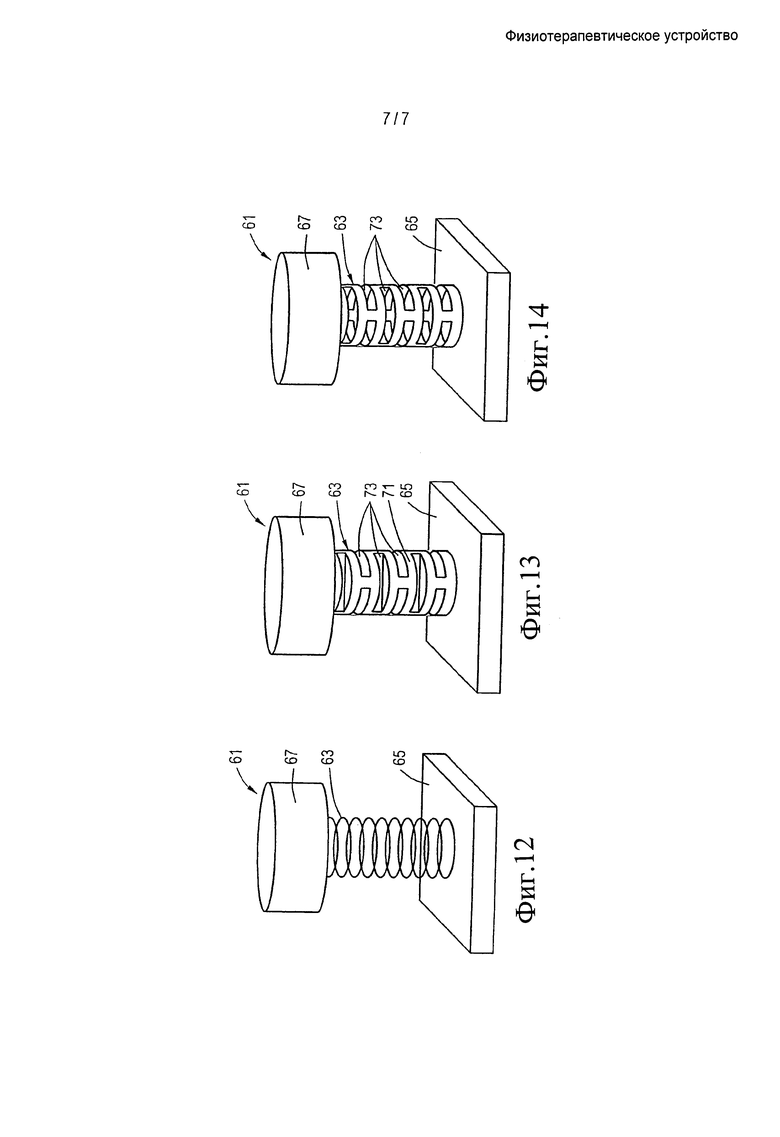
Фиг.9-10В показывают различные шаровые соединения. Фиг.11А-14 показывают различные гибкие соединения.
ПОДРОБНОЕ ОПИСАНИЕ ФОРМ ОСУЩЕСТВЛЕНИЯ
Следует отметить, что чертежи являются схематическими, не обязательно в масштабе, и что детали, которые не требуются для понимания настоящего изобретения, возможно, были опущены. Термины "вверх", "вниз", "ниже", "выше" и т.п.касаются вариантов осуществления в том виде, как они ориентированы на чертежах, если не указано иное. Кроме того, элементы, которые являются по меньшей мере по существу идентичными или которые выполняют по меньшей мере по существу идентичную функцию, обозначены той же самой цифровой позицией, где это полезно индивидуализированным буквенным суффиксом.
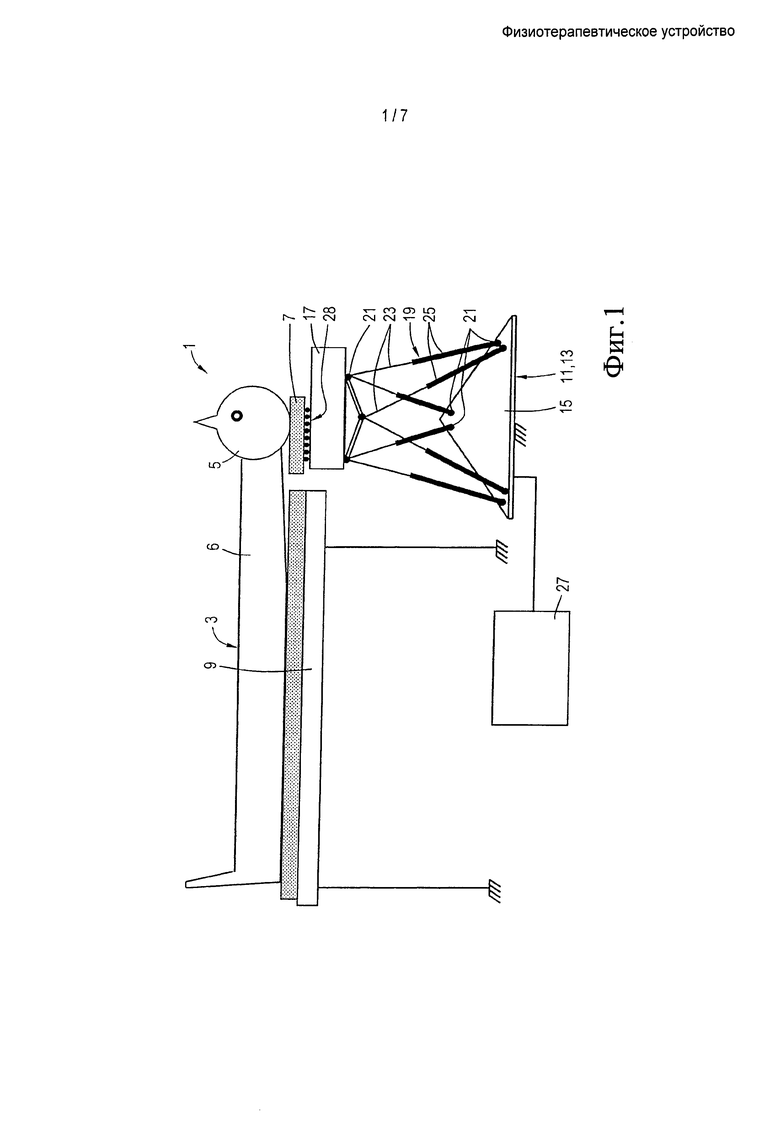
На фиг.1 показано устройство 1, выполненное с возможностью лечения пациента 3 посредством управляемого маневрирования по меньшей мере частью тела, в настоящем примере головы 5 относительно торса 6 пациента 3. Устройство 1 содержит опору 7 для поддержки головы 5 и вторую опору 9 в форме скамьи для поддержки торса и конечностей пациента 3. Вторая опора 9 может содержать многочисленные части, которые могут быть подвижными относительно друг друга, например, для комфорта пациента (не показаны). Манипулятор 11 соединен с опорой 7 для ее поддержки и маневрирования ею. Опора 7 может включать опорную подушку, люльку и/или средство для обеспечения и сохранения конкретного положения головы относительно опоры 7.
Показанный манипулятор 11 содержит механизм 13 с параллельными связями, здесь в виде платформы Стюарта или гексапода 13, имеющего базу 15, платформу 17 и шесть линейных приводов 19, соединенных шарнирами 21 с базой 15 и платформой 17. Каждый линейный привод 19 включает ходовой винт 23 с резьбой и с возможностью вращения, помещенный в резьбовую часть внутри трубы 25. Другие типы приводов, например, гидравлические или пневматические приводы, приводы со шкивами, реечные или приводы с ходовым винтом, не имеющие трубу, и т.д. являются возможными. Однако привод с ходовым винтом по сравнению с другими типами привода обычно предпочтителен, будучи менее дорогим, требуя меньшего технического обслуживания и имея меньший вес. Каждый привод 19 вращается серводвигателем или шаговым двигателем (не показаны), чтобы изменять длину соответствующего привода 19. Комбинация длин каждого привода 19 определяет относительное положение и ориентацию базы 15 и платформы 17 платформы 13 Стюарта. Так как опора 7 соединена с (платформой 17) манипулятором 11, относительное положение и ориентация опоры 17 определяются регулированием приводов 19. Контроллер 27 связан с манипулятором 11, чтобы управлять приводами 19 устройства 1 для маневрирования опорой 7. Таким образом можно маневрировать головой 5, когда она соответственно позиционирована на опоре 7 или в ней.
Кроме того, дополнительный подшипник 28 предусматривается для того, чтобы позволить перемещение опоры 7 относительно платформы 17 для увеличения степени подвижности при перемещении шеи в одном или более направлениях относительно платформы 17. Перемещение в конкретном направлении может определяться игольчатыми подшипниками и/или направляющей; для перемещения в множестве направлений могут использоваться шарикоподшипники. Преимуществом являются увеличенные гибкость и комфорт для пациента 3, однако за счет сниженной управляемости положением и/или траекторией головы 5 относительно платформы 17.
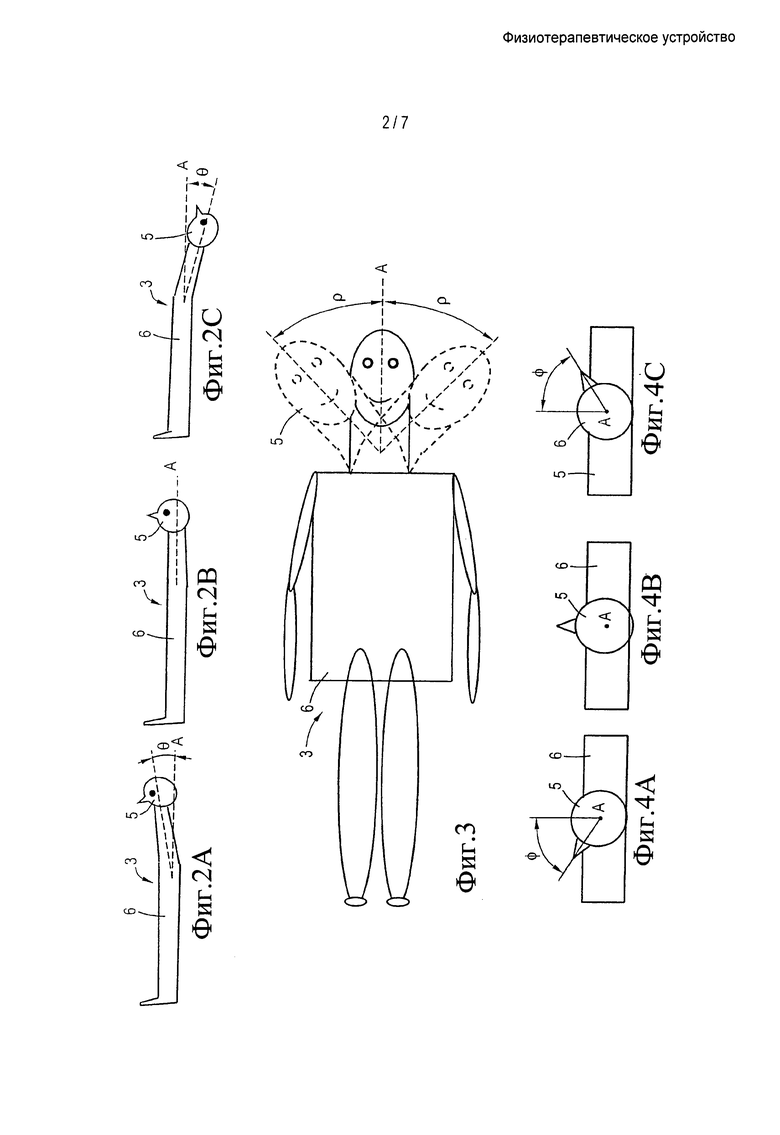
Фиг.2А-2С, 3 и 4А-4С поясняют основные перемещения головы 5 пациента 3, три по существу перпендикулярных перемещения сагиттального сгибания-разгибания в пределах угла 9, определяемого в сагиттальной плоскости (фиг.2А-2С), корональные наклоны в пределах угла ρ, определяемого в корональной плоскости (фиг.3), и горизонтальное вращение в пределах угла ф, определяемого в поперечной плоскости (фиг.4А-4С). Ориентация (θ, ϕ, ρ) головы определяется относительно анатомической продольной оси А. Так как шея человека содержит семь позвонков, только теоретически идеальное горизонтальное вращение приводит к повороту вокруг фиксированной оси вращения, сагиттальное сгибание-разгибание и корональные наклоны приводят как к повороту, так и к поступательному перемещению центра вращения. Комбинированные перемещения в многочисленных направлениях вне плоскостей также возможны, так что голова 5 может перемещаться в телесном угле Ω, в целом перекрываемым достижимым диапазоном углов (θ, ϕ, ρ) (не показаны).
Сходные соображения применимы для других суставов, которые могут достигать больших (например, плеч) или меньших (например, колен) телесных углов.
Основной целью физиотерапии является достижение нормальной подвижности (скорости и диапазона движения) для пациента, или по меньшей мере как можно ближе и насколько возможно удобно для конкретного пациента.
Диапазон движения, найденный для нормальных здоровых людей между 10 и 90 годами, приведен в нижеследующей табл.1, показывающей перемещение (см. фиг.2А-4С: сагиттальное разгибание (не показано) является выдвижением лица вперед с головой параллельно торсу, при этом измеряется угол шеи относительно торса), максимальный угол, достигаемый этим перемещением, и полный диапазон движения при этом перемещении.
У людей диапазон движения имеет тенденцию уменьшаться с возрастом. Гибкие люди и более молодые люди могут достигать более высоких перечисленных значений, например, подростки могут достигать диапазона сгибания приблизительно 130°-135°, с θ приблизительно между -70° и 70°, диапазон наклона приблизительно 90°, с ρ между -45° и 45°, и горизонтального поворота в диапазоне приблизительно 160°, с ϕ между -80° и 80°. Для лечения пожилого пациента, предпочтительно иметь меньший диапазон движения. Чтобы сделать возможным лечение большинства пациентов, с учетом отличий в росте и физических недостатках, может быть предусмотрена манипуляция головы до угла 9 сагиттального сгибания приблизительно -70° (назад) и 70° (вперед), до угла ρ коронального наклона приблизительно -50° (влево) и 50° (вправо), и до угла ϕ горизонтального поворота приблизительно -45° (влево) и 45° (вправо), так как ограничение при горизонтальном повороте может быть легко компенсировано пациентом с помощью поворота плеч или части торса. Угол ϕ горизонтального поворота приблизительно до -90° (влево) и 90° (вправо) может быть предпочтительным для лечения самой шеи, не требующего поворота торса или плеч.
Поступательное движение в корональном направлении приблизительно на 15-20 см желательно, чтобы учитывать искривление позвонков шеи и/или смещение черепа средних взрослых при лечении коронального наклона. Аналогичное поступательное движение желательно в сагиттальном направлении при лечении сгибания. Большие диапазоны поступательного движения, например, до 30 или 40 см, по меньшей мере в корональном направлении предпочтительны для облегчения лечения более высоких пациентов. Предпочтительно, диапазон поступательного движения по существу равен в двух измерениях параллельных корональной плоскости (например, горизонтальной), и он может быть по существу равен в третьем измерении, в сагиттальной плоскости.
Таким образом, манипулятор 11 может маневрировать частью 5 тела в объеме, перекрываемом комбинацией диапазона поступательного движения и вращения. В то время как статическая физиотерапия обычно касается только поддержания относительных положений и ориентации подвергаемой лечению части тела, в динамической физиотерапии терапевтические маневры известны для различных заболеваний. Маневр может производиться с необходимой продолжительностью, соответствующей конкретной скорости движения. Типичная последовательность шагов маневрирования для физиотерапевтического лечения головы и шеи определена в таблице 2, причем каждый шаг может занимать приблизительно от 30 до 90 секунд.
Конечные точки каждого перемещения могут изменяться от одного пациента к другому и/или от одной процедуры терапии к другой. Альтернативные последовательности шагов маневрирования также возможны.
Предпочтительно, устройство устроено так, что углы (θ, ϕ, ρ) пациента соответствуют углам по существу чистого вращения, наклона и поворота в горизонтальной плоскости манипулятора 11. Это облегчает управление и/или программирование устройства и может оптимизировать использование диапазона перемещения, имеющегося у манипулятора. Исходные положения и конечные положения головы и, следовательно, опоры также могут определяться для сложных движений в зависимости от размера пациента 3.
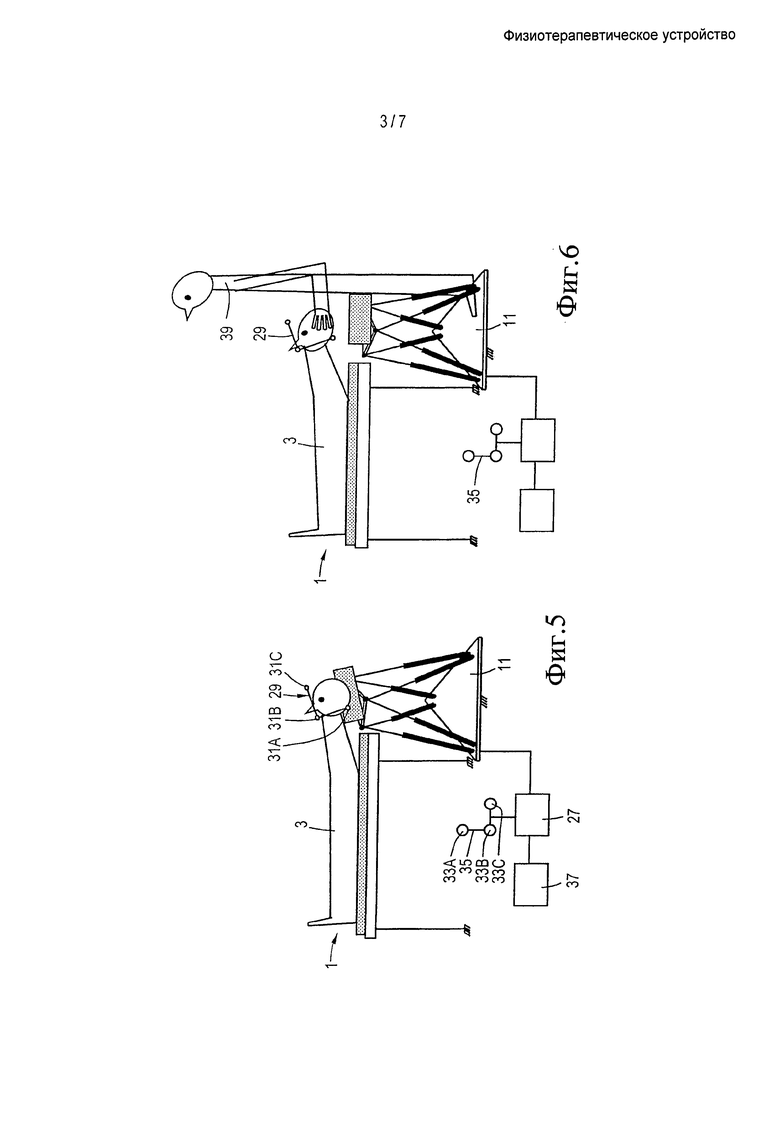
На фиг.5 показан второй вариант осуществления устройства 1. Устройство 1 содержит носимый пациентом объект, здесь приспособление 29 для ношения на голове в виде очковой оправы 29, носимой пациентом 3 и снабженной тремя источниками сигнала в виде излучателей 31А-31С для излучения ультразвуковых импульсов и радиоимпульсов. Кроме того, устройство 1 содержит три детектора сигналов в виде ультразвуковых детекторов 33А-33С и по меньшей мере один детектор радиосигналов (не показан) для обнаружения ультразвуковых импульсов и радиоимпульсов излучателей 31А-31С, соответственно. Все приемники 33А-33С связаны с контроллером. Детектор радиосигналов может быть включен в состав ультразвукового детектора. Каждый детектор 33А-33С присоединен к раме 35, или опционально к некоторому другому элементу, такому как стена, вторая опора 9 и т.д., при условии, что он может обнаруживать сигналы, излучаемые излучателями 31А-31С. В частности, в случае ультразвуковых сигналов или. оптических сигналов между источниками 31А-31С и детекторами 33А-33С должна быть по существу прозрачная и без препятствий линия прямой видимости для предотвращения возможного ухудшения или потери сигнала. Кроме того, устройство 1 содержит часы (не показано) и запоминающее устройство 37 для хранения данных.
Излучатели 31А-31С расположены для определения первой плоскости посредством излучателей 31А-31С. Детекторы 33А-33С расположены для определения второй плоскости посредством приемников 33А-33С.
При эксплуатации первый излучатель 31А производит радиосигнал и ультразвуковой сигнал. Сигналы могут включать один или более импульсов или последовательности импульсов, и, возможно, включать информацию для идентификации излучателя 31А-31С. Радиосигнал обнаруживается детектором радиосигналов. Ультразвуковые сигналы обнаруживаются каждым из детекторов 33А-33С и об обнаружении (его моменте) сигнализируется в контроллер 27. С момента обнаружения радиосигнала детектором радиосигналов детекторы 33А-33С и контроллер 27 измеряют время прихода ультразвукового сигнала в каждый детектор 33А-33С для определения соответствующих времен прохождения сигналов Т(31А, 33А), Т(31А, 33В) и Т(31А, 33С). Разности между временами прохождения сигналов Т(31А, 33А), Т(31А, 33В) и Т(31А, 33С) как следствие различных расстояний прохождения позволяют определить положение источника сигнала относительно детекторов. Определение всех комбинаций времен прохождения сигналов Т(31А, 33А), Т(31А, 33В) и Т(31А, 33С); Т(31В, 33А), Т(31В, 33В) и Т(31В, 33С); Т(31С, 33А), Т(31С, 33В) и Т(31С, 33С) позволяет определить взаимные ориентации первой и второй плоскостей, перекрываемых излучателями 31А-31С и детекторами 33А-33С. Это приводит к полному определению из определяемых относительных положений пространственного положения и ориентации приспособления 29 для ношения на голове, и таким образом головы 5 пациента и рамы 35 относительно друг друга.
Также или альтернативно, опора 7 может быть снабжена излучателями. Наличие на стороне пациента (приспособления 29 для ношения на голове и/или опоры 7 и т.д.) излучателей 31 и на стороне контроллера или удаленной стороне (рама 35 и т.д.) детекторов 33 облегчает обработку сигналов:
приспособление 29 для ношения на голове может содержать маломощную батарею питания, питающую источники 31 сигналов для излучения передаваемых по радио сигналов, тогда как детекторы 33 могут быть соединены проводами и/или объединены с контроллером 27.
Для повышения надежности измерений предпочтительно, чтобы источники ультразвука располагались с взаимными разнесениями приблизительно 15 см или больше. Большее разнесение повышает надежность триангуляции, так как с увеличением разнесения постоянная абсолютная погрешность будет вести к меньшей относительной ошибке. Это применимо также к ультразвуковым детекторам.
Другой способ определения ориентации (отклонений в ориентации) части тела включает использование одного или более гироскопов и/или одного или более инклинометров, присоединенных к части тела и/или опоре. Инклинометр может обнаруживать ориентацию (отклонения в ориентации) относительно гравитационного поля и/или другой системы отсчета, например магнитного поля, предпочтительно магнитного поля Земли. Один инклинометр может использоваться для определения ориентации (отклонений в ориентации) в одной плоскости, и может таким образом предоставлять по существу ту же самую информацию, что и два источника (или детектора) сигналов и три детектора (или источника, соответственно).
Предпочтительно, по меньшей мере два инклинометра используются для определения ориентации (отклонения в ориентации) в двух пространственных направлениях под углом друг к другу, предпочтительно, взаимно перпендикулярно, что позволяет определять трехмерный наклон контролируемого объекта (части тела и/или опоры). Гироскоп облегчает контроль скорости и/или ускорения и, в частности, угловой скорости и/или ускорения, и позволяет определять угол поворота интегрированием. измеряемой угловой скорости за определенное время.
В предпочтительном варианте осуществления два инклинометра расположены по существу взаимно перпендикулярно и выполнены с возможностью измерения углов наклона относительного местного горизонта (местной плоскости земли), например, углов наклона и поворота, которые могут соответствовать углу сагиттального сгибания-разгибания (наклона) θ и углу горизонтального вращения ϕ (поворота). Кроме того, гироскоп предусмотрен для измерения по существу перпендикулярно к плоскостям измерения инклинометров, чтобы измерять угол поворота в горизонтальной плоскости (ρ), который может соответствовать углу коронального поворота. Магнитные инклинометры и гироскопы могут быть объединены в одну интегральную схему.
В особенно предпочтительном варианте осуществления изобретения терапевтического устройства опора снабжена двумя или тремя источниками сигналов и/или детекторов, соответственно, и приспособление для ношения на голове содержит по меньшей мере один источник сигнала или детектор, соответственно, и один или два инклинометра и один или более гироскопов. Источники и/или детекторы сигналов предпочтительно включают ультразвуковые источники и/или детекторы, как и прежде. Таким образом, положение и ориентация опоры могут надежно определяться, размер опоры является относительно неважным и поэтому допускает разнесение источников и/или детекторов сигналов свыше 15 см. Кроме того, положение и/или смещение приспособления для ношения на голове может определяться от источника и/или детектора и (изменений в) его ориентации от инклинометров и гироскопа(-ов), которые могут быть объединены в устройстве малого объема, например, одной интегральной схеме.
Врачи обычно используют маневрирование частью тела, подвергаемой лечению, как для диагностических, так и для терапевтических целей, возможно в комбинации в одной траектории.
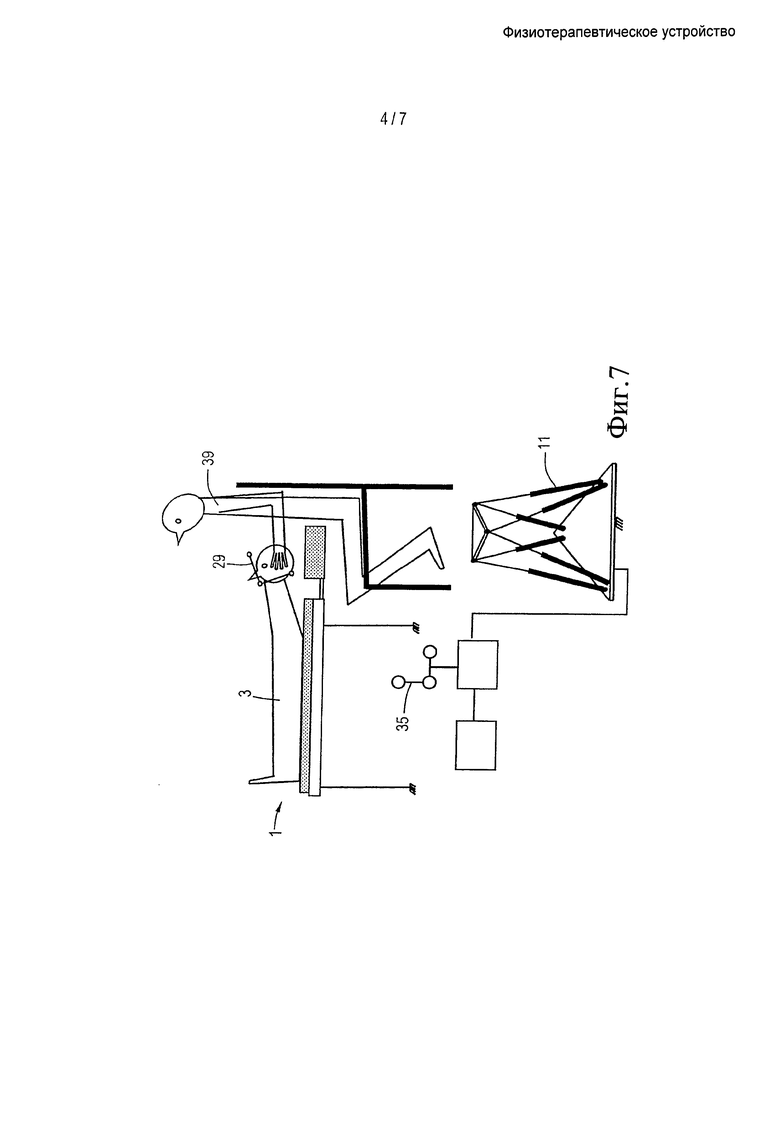
Как показано на фиг.6 и 7, при типичной процедуре терапевтического лечения пациент 3 позиционируется на первой и/или второй опоре 7, 9 и врач 39 маневрирует подвергаемой лечению частью тела, в данном случае головой 5. В течение этого врач 39 может держать непосредственно часть 5 тела и/или опору 7 с присоединенной к ней частью 5 тела. При непосредственном удержании части 5 тела врач 39 маневрирует и лечит пациента 3 привычным образом и в то же самое время получает от тела пациента жесткую обратную связь, облегчающую диагностику и контроль за ходом лечения.
Во время лечения и/или диагностики положение и ориентация части 5 тела многократно определяются излучателями 31А-31С, детекторами 33А-33С и контроллером 27, и эти данные сохраняются с надлежащими отметками времени в запоминающем устройстве 37. Таким образом записываются фактические перемещения и траектория части 5 тела (и/или в подходящем случае перемещения и траектория опоры 7).
При маневрировании частью 5 тела, снабженной излучателями 31А-31С, опора 7 и/или манипулятор 11 могут быть по меньшей мере частично опущены, отодвинуты и/или вообще удалены для обеспечения свободы выбора положения тела и/или перемещения для врача 39.
Для автоматизированного лечения устройством 1 манипулятор 11 помещают в необходимое положение, возможно, соединенным с соединительной деталью на полу лечебного помещения и/или присоединенным ко второй опоре 9. Затем часть 5 тела и опору 7 помещаются в желаемое положение, например врачом 39. Расположение (приводов 19) манипулятора 11 и положение опоры 7 определяются контроллером и положение и ориентация части 5 тела определяются относительно (рамы 35) устройства, например, используя сигналы от источников 31 и детекторов 33 сигналов. Затем применяется лечение устройством 1 посредством приведения в действие одного или более приводов 19 под управлением контроллера 27 так, чтобы маневрировать опорой 7 таким образом, что частью 5 тела маневрируют согласно траектории, определенной последовательностью маневрирования врача.
Траектория может сохраняться в запоминающем устройстве 37 или считываться из него или другого носителя данных как части кода программного обеспечения, которое, при выполнении контроллером 27, приводит в действие по меньшей мере часть манипулятора 11, например, по меньшей мере один из приводов 19, в заданной последовательности шагов так, чтобы маневрировать опорой 7 согласно желаемой последовательности маневрирования для лечения части 5 тела пациента 3; это позволяет хранить и передавать данные лечения в другое устройство 1 лечения, в файл пациента для дальнейшего обращения и т.д.
В устройстве 1, изображенном на фиг.1 и 5-7, платформа 13 Стюарта установлена справа с платформой 17, поддерживаемой приводами 19 над базой 15. В альтернативном варианте осуществления, см. фиг.8, манипулятор 11 содержит платформу 13 Стюарта, которая расположена по существу горизонтально, а опора 7 в виде консоли выступает от платформы 17. Это дает возможность сидящему врачу маневрировать головой 5. Однако нагрузка на платформу 13 Стюарта менее благоприятна, чем в вертикальном случае, и манипулятор 11 требует более прочной платформы 13 Стюарта, которая имеет тенденцию быть более тяжелой, более дорогой и, возможно, менее точной. Это также может препятствовать использованию магнитных шаровых соединений (которые могут иметь слишком малую силу притяжения в пределах приемлемых финансовых и/или пространственных ограничений), но подходящие гибкие соединения могут быть предусмотрены и успешно использоваться.
В варианте осуществления, изображенном на фиг.8, показана также другая конструкция плоской рамы 35 с детектором 33. Кроме того, видно размещение плоскости излучателей 31 на приспособлении 29 для ношения на голове.
На фиг.9 показан вид поперечного сечения стандартного шарового соединения 41, содержащего шар 43, который помещен в сопряженный корпус 45. Шар 43 соединяется или может соединяться с другим объектом с помощью оси 47 с резьбой. Шар 43 удерживается в заданном положении в корпусе 45 кольцом 49.
На фиг.10А и 10В показаны в виде перспективного изображения (фиг.10А) и в виде поперечного сечения (фиг.10В) приводимые в качестве примера магнитные шаровые соединения 51 для использования в качестве улучшенного шарнира 21, содержащего шар 53, который помещен в сопряженный корпус 55. Шар 53 соединяется или может соединяться с другим объектом, например, с осью 57 с резьбой. Шар 53 удерживается в заданном положении в корпусе 55 магнитной частью 59, притягивающей шар 53.
Из сравнения фиг.9 и 10В очевидно, что магнитное шаровое соединение 51 имеет значительно большую степень подвижности перемещения между корпусом 55 и осью 57 с резьбой, чем стандартное шаровое соединение 41 между корпусом 45 и осью 47 с резьбой.
На фиг.11А-14 показаны различные гибкие соединения 61 для использования в качестве улучшенного шарнира 21, содержащие гибкий элемент 63, прикрепленный к первому объекту 65, например, базе 15, и ко второму элементу 67, например, приводу 19, и связывающий эти элементы. Гибкий элемент 63 может быть прикреплен любым подходящим способом, например, опорой 69 с зажимным кольцом. Промышленные резиновые гибкие элементы 63 гибкого соединения могут содержать гайку с резьбой для прикрепления гибкого элемента к другому объекту. Фиг.11 В поясняет это, достаточно длинный и упругий гибкий элемент, если это также позволяет форма первого и второго объектов 65, 67, может легко сгибаться приблизительно на 90° в любом направлении от прямого положения, допуская степень подвижности перемещения в телесному угле по существу 2π стерадиан.
Фиг.12 схематично иллюстрирует упругое гибкое соединение 61 с гибким элементом 63 между двумя объектами 65, 67 в форме цилиндрической винтовой пружины. Фиг.13 схематично иллюстрирует упругое гибкое соединение 61 с гибким элементом 63, сформированным стержнем 71, имеющим периодические тангенциальные или радиальные вырезы 73 в различных направлениях по направлению удлинения стержня 71. Здесь вырезы 73 чередуются в направлениях, которые являются перпендикулярными друг другу. Фиг.14 поясняет гибкое соединение, сходное с фиг.13, но с трубчатым гибким элементом 63, имеющим сквозные вырезы 73 в стенке трубчатого гибкого элемента 63. Еще один вариант осуществления (не показан) содержит полый гибкий элемент, имеющий гибкую стенку в форме гармошки с периодически изменяющимся диаметром в направлении длины гибкого элемента, чтобы придать гибкость и упругость трубе.
Гибкое соединение 21, прикрепленное н а одном конце к базе 15 или платформе 17, а на другом конце к приводу 19 с ходовым винтом, может испытывать некоторое вращение, зависящее от конструкции и/или материала гибкого элемента, но будет достаточно предотвращать вращение привода 19 с ходовым винтом относительно базы 15 или платформы 17 так, чтобы исключить дополнительные меры для предотвращения нежелательного вращения привода 19 с ходовым винтом относительно базы 15 или платформы 17 и/или ходового винта 23 и трубы 25 относительно друг друга.
Изобретение не ограничено описанным выше вариантами осуществления, которые могут быть изменены множеством способов в пределах объема формулы изобретения. Например, устройство может содержать один или более соединителей, считывающих устройств, записывающих устройств и/или приемников для одного или более носителей данных (не показано) (для соединения с ними) и запоминающее устройство, чтобы предоставлять и/или хранить данные и/или программу для использования контроллером и/или для его программирования.
Устройство может содержать интерфейс пользователя, с помощью которого пользователь, например, врач, может адаптировать и/или программировать последовательность маневрирования и записывать ее в запоминающее устройство. Например, при компоновке хранящихся последовательностей маневрирования в желаемую траекторию или программу, периодически повторяющуюся траекторию с возрастающей амплитудой движения (например, угла сгибания, коронального поступательного движения и т.д.) и/или скоростью при каждом повторе. Данные из зарегистрированных - маневров лечения и траекторий и/или части кода программного обеспечения для их выполнения устройством 1 могут поставляться и/или продаваться на подходящих носителях данных.
Различные носимые пациентом объекты могут поставляться отдельно или в комплекте с манипулятором и/или опорой, например, приспособления для ношения на голове, соответствующие размерам пациента, заболеваниям и/или предпочтениям пользователя, и/или для замены.
Первая опора и по меньшей мере часть второй опоры могут быть соединены подвижно, как показано на фиг.7.
Способ может включать позиционирование и/или ориентирование части тела и/или части устройства, например, опоры, в одно или более заданных по умолчанию положений и/или ориентации для установки в исходное положение, увеличивающие надежность установки и/или маневрирования. Это может включать многократный возврат в исходное положение.
Элементы и аспекты, рассмотренные для конкретного варианта осуществления или в связи с ним, могут подходящим образом комбинироваться с элементами и аспектами других вариантов осуществления, если явно не указано иное.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДЕКСИРУЕМАЯ РЕЖУЩАЯ ПЛАСТИНА | 2011 |
|
RU2566114C2 |
| УСТРОЙСТВО РЕНТГЕНОВСКОЙ ВИЗУАЛИЗАЦИИ | 2017 |
|
RU2736213C2 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2018 |
|
RU2691217C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ПОТОКОМ МОЩНОСТИ В ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2006 |
|
RU2393608C2 |
| СПОСОБ УПРАВЛЕНИЯ ГЕНЕРАТОРОМ ПОСТОЯННОЙ ЧАСТОТЫ С ИЗМЕНЯЕМЫМ ЧИСЛОМ ОБОРОТОВ ДВИГАТЕЛЯ | 2010 |
|
RU2544847C2 |
| СПОСОБ И УСТАНОВКА ДЛЯ ПРОИЗВОДСТВА ШИН ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2342253C2 |
| ПАРИК | 2007 |
|
RU2404692C2 |
| ДНИЩЕ КОВША | 2003 |
|
RU2302317C2 |
| СПОСОБ ПРОСТРАНСТВЕННОГО ПЕРЕНОСА ПОЛОЖЕНИЯ ВЕРХНЕЙ ЧЕЛЮСТИ С УЧЕТОМ ИНДИВИДУАЛЬНЫХ ПАРАМЕТРОВ, ОККЛЮЗИОННАЯ ВИЛКА С ОПРЕДЕЛЕНИЕМ ПОЛОЖЕНИЯ В ПРОСТРАНСТВЕ И ПРИСПОСОБЛЕНИЕ ДЛЯ ПОЗИЦИОНИРОВАНИЯ МОДЕЛИ ВЕРХНЕЙ ЧЕЛЮСТИ В ПРОСТРАНСТВЕ ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2015 |
|
RU2602044C2 |
| МОБИЛЬНЫЙ РЕНТГЕНОВСКИЙ АППАРАТ | 2011 |
|
RU2620931C2 |
Изобретение относится к медицинской технике, а именно к средствам для динамической физиотерапии. Устройство содержит опору для по меньшей мере частичной поддержки и удержания части тела пациента, соединенный с ней манипулятор, который включает механизм с параллельными связями, первую часть и вторую часть, причем первая часть включает множество источников излучения сигнала, а вторая часть включает множество детекторов обнаружения по меньшей мере части сигнала, и/или первая или вторая часть содержит излучатель сигнала и по меньшей мере один инклинометр и/или гироскоп, при этом каждый сигнал, излучаемый источником и обнаруженный детектором, имеет время прохождения сигнала между соответствующим источником и детектором. Устройство включает также контроллер, выполненный с возможностью определения множества времен прохождения сигнала между по меньшей мере некоторыми из источников и по меньшей мере некоторыми из детекторов и определения пространственного положения и ориентации первой и второй частей относительно друг друга на основе множества определенных времен и данных измерений инклинометра и/или гироскопа. Устройство также выполнено с возможностью сохранения в запоминающем устройстве множества определенных пространственных положений и ориентаций первой части и второй части относительно друг друга, а контроллер выполнен с возможностью считывать по меньшей мере часть хранящихся в запоминающем устройстве определенных пространственных положений и ориентаций первой части и второй части относительно друг друга, определять по меньшей мере одну последовательность маневрирования частью тела как функцию хранящихся в запоминающем устройстве множества определенных пространственных положений и ориентаций первой и второй частей относительно друг друга, и управлять устройством для приведения в действие манипулятора, чтобы маневрировать опорой таким образом, чтобы часть тела, когда она должным образом позиционирована на опоре, выполняла маневры согласно по меньшей мере упомянутой последовательности маневрирования. Способ работы и носитель данных, содержащий части кода программного обеспечения, обеспечиваются устройством. Использование изобретения позволяет повысить точность маневрирования за счет обучающей последовательности. 3 н. и 12 з.п. ф-лы, 14 ил.
1. Устройство (1) для лечения части (5) тела пациента (3), содержащее:
опору (7) для по меньшей мере частичной поддержки и удержания части тела пациента (3); и
манипулятор (11), соединенный с опорой, для поддержания опоры и маневрирования ею,
при этом манипулятор включает механизм (13) с параллельными связями;
первую часть (29) и вторую часть (35), причем первая часть включает множество источников (31А, 31В, 31С) для излучения сигнала, а вторая часть включает множество детекторов (33А, 33В, 33С) для обнаружения по меньшей мере части сигнала, и/или первая или вторая часть содержит излучатель сигнала и по меньшей мере один инклинометр и/или гироскоп,
при этом каждый сигнал, излучаемый источником и обнаруженный детектором, имеет время прохождения сигнала между соответствующим источником и детектором,
причем устройство включает контроллер (27), выполненный с возможностью определения множества времен прохождения сигнала между по меньшей мере некоторыми из источников и по меньшей мере некоторыми из детекторов и определения пространственного положения и ориентации первой и второй частей относительно друг друга на основе множества определенных времен прохождения сигнала и данных измерений инклинометра и/или гироскопа, когда это применимо,
при этом устройство также выполнено с возможностью сохранения в запоминающем устройстве (37) множества упомянутых определенных пространственных положений и ориентаций первой части (29) и второй части (35) относительно друг друга,
и контроллер (27) выполнен с возможностью
считывать по меньшей мере часть хранящихся в запоминающем устройстве (37) множества упомянутых определенных пространственных положений и ориентаций первой части (29) и второй части (35) относительно друг друга,
определять по меньшей мере одну последовательность маневрирования частью тела (5) как функцию хранящихся в запоминающем устройстве (37) множества упомянутых определенных пространственных положений и ориентаций первой части (29) и второй части (35) относительно друг друга; и
управлять устройством (1) для приведения в действие манипулятора (11), чтобы маневрировать опорой (7) таким образом, чтобы часть тела, когда она должным образом позиционирована на опоре, выполняла маневры согласно по меньшей мере упомянутой последовательности маневрирования.
2. Устройство (1) по п. 1, отличающееся тем, что по меньшей мере один из множества источников или упомянутый излучатель сигнала, соответственно, выполнен с возможностью одновременного излучения первого сигнала и второго сигнала, причем первый сигнал имеет меньшую скорость по сравнению со вторым сигналом, при этом первый сигнал предпочтительно представляет собой ультразвуковой сигнал, а второй сигнал представляет собой, например, электрический, рентгенографический и/или оптический сигнал.
3. Устройство (1) по п. 1 или 2, отличающееся тем, что первая часть (29) содержит объект (29), который предназначен для ношения на части тела, такой как шлем, оправа очков, головная повязка, браслет и т.д.
4. Устройство (1) по п. 3, в котором первая часть (29) содержит приспособление (29) для ношения на голове, содержащее по меньшей мере одно из следующего: источник ультразвукового сигнала, инклинометр, гироскоп, множество источников (31А, 31В, 31С) ультразвукового сигнала.
5. Устройство (1) по п. 1 или 2, содержащее запоминающее устройство (37) для хранения в нем множества упомянутых определенных пространственных положений и ориентаций первой части (29) и второй части (35) относительно друг друга.
6. Устройство (1) по п. 1, в котором
манипулятор включает механизм (13) с параллельными связями, содержащий множество шарнирно соединенных между собой линейных приводов (19);
причем механизм (13) с параллельными связями содержит по меньшей мере один шарнир (21), содержащий гибкое соединение (61), предпочтительно эластичное, или магнитное шаровое соединение (51).
7. Устройство (1) по п. 1, в котором
манипулятор включает механизм (13) с параллельными связями, содержащий множество шарнирно соединенных между собой линейных приводов (19);
причем механизм (13) с параллельными связями содержит платформу (13) Стюарта.
8. Устройство (1) по п. 6 или 7, отличающееся тем, что по меньшей мере один из упомянутых линейных приводов (19) содержит по меньшей мере один привод с ходовым винтом.
9. Устройство (1) по п. 1 или 2, отличающееся тем, что оно включает по меньшей мере одно из серводвигателя или шагового двигателя, выполненного с возможностью приведения в действие по меньшей мере одного из линейных приводов (19).
10. Устройство (1) по п. 1 или 2, отличающееся тем, что оно выполнено с возможностью управляемого маневрирования опорой с шестью степенями свободы и в телесном угле, перекрываемом плоскими углами (θ, ϕ, ρ) во взаимно перпендикулярных направлениях приблизительно (45°, 45° 45°).
11. Устройство (1) по п. 1 или 2, дополнительно содержащее вторую опору (9) для поддержания по меньшей мере еще одной части (6) тела пациента.
12. Устройство (1) по п. 1 или 2, отличающееся тем, что оно выполнено с возможностью сохранения отметок времени, соответствующих по меньшей мере некоторым из определяемых пространственных положений и ориентаций, в запоминающем устройстве (37).
13. Способ работы физиотерапевтического устройства (1), например, устройства (1) по любому из пп. 1-12, которое включает первую часть (29), содержащую множество источников (31А, 31В, 31С) ультразвукового сигнала, и вторую часть (35), содержащую множество детекторов (33А, 33В, 33С) ультразвукового сигнала для обнаружения сигнала от источников сигналов, и/или первая или вторая часть содержит излучатель сигнала и по меньшей мере один инклинометр и/или гироскоп;
при этом способ включает следующие шаги:
a) излучение ультразвукового сигнала по меньшей мере одним источником из множества источников сигналов и
b) обнаружение ультразвукового сигнала по меньшей мере одним детектором из множества детекторов сигналов так, чтобы определить время прохождения сигнала между соответствующим источником и детектором для каждого ультразвукового сигнала, излучаемого одним из источников и обнаруженного одним из детекторов;
c) определение множества времен прохождения сигнала для прохождения заданного ультразвукового сигнала от одного источника до множества детекторов и/или прохождения заданного ультразвукового сигнала от множества источников до одного детектора;
d) определение, на основании упомянутого множества определенных времен прохождения сигнала, положения одного источника относительно многочисленных детекторов и/или, соответственно, положения одного детектора относительно многочисленных источников;
e) повторение шагов излучения и обнаружения сигнала, определения времен прохождения сигнала и определения относительных положений с различными комбинациями источников и детекторов, или определение угла поворота и/или наклона посредством инклинометра и/или гироскопа, когда это применимо; и
f) определение пространственного положения и ориентации первой и второй частей относительно друг друга с помощью контроллера (27) по упомянутым определенным относительным положениям, а также углам поворота и/или наклона, когда это применимо;
g) повторение шагов a-f;
h) сохранение упомянутых определенных пространственных положений и ориентаций первой и второй частей относительно друг друга в запоминающем устройстве (37);
i) определение по меньшей мере одной последовательности маневрирования частью (5) тела как функции по меньшей мере части упомянутых определенных пространственных положений и ориентаций первой и второй частей, хранящихся в запоминающем устройстве (37); и
j) приведение в действие по меньшей мере части манипулятора (11) для маневрирования опорой (7) таким образом, чтобы часть тела, когда она надлежащим образом поддерживается и удерживается опорой, маневрировала согласно по меньшей мере части упомянутой последовательности маневрирования.
14. Способ по п. 13, отличающийся тем, что он включает дополнительный шаг маневрирования одной из первой и второй частей относительно другой из них во время выполнения шага d.
15. Носитель данных, содержащий части кода программного обеспечения, который при выполнении контроллером (27) управляет устройством (1) по любому из пп. 1-12, осуществляя способ по любому из пп. 13-14 и/или приводя в действие по меньшей мере часть манипулятора (11) в заданной последовательности шагов, чтобы маневрировать опорой (7) устройства согласно по меньшей мере упомянутой последовательности маневрирования, в частности, для лечения части (5) тела пациента (3).
| US 2009112262 A1, 30.04.2009 | |||
| US 5425378 A, 20.06.1995 | |||
| Способ измерения акустических или механических сопротивлений акустических или механических систем | 1946 |
|
SU71026A1 |
| DE 10351455 A1, 30.06.2005 | |||
| US 2009221928 A1, 03.09.2009 | |||
| УЛЬТРАЗВУКОВАЯ КОРРЕКЦИЯ ФОРМЫ ТЕЛА БЕЗ ХИРУРГИЧЕСКОГО ВМЕШАТЕЛЬСТВА | 2001 |
|
RU2295366C2 |

