Настоящее изобретение относится к устройству рентгеновской визуализации такого типа, как указано в ограничительной части пункта 1 формулы изобретения.
В частности, настоящее изобретение относится к конкретному устройству, выполненному с возможностью использования в сфере медицины или ветеринарии по меньшей мере для получения изображений по меньшей мере части внутренней анатомии пациента и, таким образом, проведения анализа, диагностики или другого обследования указанного пациента.
Как известно, рентгеновские устройства, имеющиеся в настоящее время в продаже, могут выполнять различные виды анализа и имеют подобную конструкцию.
Фактически почти все известные устройства визуализации содержат стол, на который помещают пациента, панель управления, выполненную с возможностью управления работой устройства; и гентри, то есть устройство, содержащее полость, в которую помещают часть тела, подлежащую анализу, и которая подходит для создания изображений пациента.
Более подробно, в гентри может находиться источник рентгеновского излучения, приемник, который принимает рентгеновские лучи после их прохождения через часть тела, подлежащую анализу; и система перемещения, выполненная с возможностью одновременного перемещения источника и приемника вокруг пациента.
В последние годы устройства визуализации дополнительно оснащают механическим манипулятором, помогающим оператору выполнять действия с пациентом.
В этих случаях внутри помещения расположены как устройство рентгеновской визуализации, так и механический манипулятор, который в зависимости от типа сбора информации, выполняемого устройством визуализации, перемещается к пациенту и, таким образом, перемещается с медицинским инструментом (например, источником для радиотерапии) к части тела пациента, изображения которой необходимо получить.
Перечисленные выше устройства из известного уровня техники имеют несколько существенных недостатков.
Первый важный недостаток заключается в сложности и трудности установления пространственной взаимосвязи между механическим манипулятором и устройством визуализации и, таким образом, управления относительным положением между механическим манипулятором и гентри для предотвращения столкновения, в результате которого может произойти повреждение одного из двух элементов.
Чтобы устранить эту проблему, помещение часто оснащают одной или несколькими камерами, которые, за счет съемки устройства визуализации и механического манипулятора, позволяют определить посредством панели управления относительное положение между устройством визуализации и механическим манипулятором.
Однако это решение имеет несколько важных недостатков.
Первый недостаток связан с тем, что внутри помещения часто находятся операторы, которые, перемещаясь по помещению, препятствуют обзору камер, что делает практически невозможным непрерывный контроль относительного положения между механическим манипулятором и устройством визуализации.
Следует отметить, что такая визуальная помеха может также быть вызвана гентри, который во время перемещения может оказаться между камерой и механическим манипулятором.
Более того, может наблюдаться другой недостаток, заключающийся в том, что, в случае подвижных устройств рентгеновской визуализации, устройство визуализации находится далеко от механического манипулятора, который, таким образом, не может достать до всех частей тела пациента, что вынуждает оператора перемещать устройство визуализации с пациентом на нем.
Указанная невозможность механического манипулятора достать до пациента также может быть обусловлена оператором, который, занимая определенные положения относительно стола, может препятствовать занятию механическим манипулятором требуемого положения.
Также следует отметить, что такое перемещение механического манипулятора может быть очень сложным для оператора и, в первую очередь, особенно опасным для пациента, учитывая наличие канюлей, капельниц или кабелей, соединяющих пациента с медицинскими инструментами.
Другой важный недостаток заключается в том, что оператор обладает ограниченной свободой движений в связи с наличием гентри и, кроме того, механического манипулятора, которые, находясь рядом с местом размещения устройства рентгеновской визуализации, представляют собой помеху для оператора.
В этой ситуации технической целью настоящего изобретения является разработка устройства рентгеновской визуализации, которое фактически может преодолеть упомянутые выше недостатки.
В рамках указанной технической задачи одна важная цель настоящего изобретения заключается в предоставлении устройства рентгеновской визуализации, характеризующегося наличием гентри, для которого можно просто и однозначно установить пространственную взаимосвязь с механическим манипулятором для предотвращения столкновения между механическим манипулятором и частями устройства.
Другой важной целью настоящего изобретения является предоставление устройства визуализации, которое позволяет механическому манипулятору достичь любой точки пациента, расположенного на устройстве визуализации.
Другой целью настоящего изобретения является разработка устройства визуализации, которое обеспечивает высокую свободу перемещения для оператора.
Техническая цель и указанные задачи достигаются посредством устройства рентгеновской визуализации, заявляемого в пункте 1 приложенной формулы изобретения.
Предпочтительные варианты осуществления станут очевидны из зависимых пунктов.
Характеристики и преимущества настоящего изобретения станут очевидны из последующего подробного описания его предпочтительных вариантов осуществления, изложенных со ссылкой на сопутствующие графические материалы, на которых:
на фиг. 1а показан вид сбоку устройства рентгеновской визуализации;
на фиг. 1b показан вид спереди устройства, показанного на фиг. 1а;
на фиг. 2а показан вид сбоку устройства рентгеновской визуализации в другом положении;
на фиг. 2b показан вид спереди устройства, показанного на фиг. 2а;
на фиг. 3а показан вид сбоку другого устройства рентгеновской визуализации в соответствии с настоящим изобретением;
на фиг. 3b показан вид спереди устройства, показанного на фиг. 3а;
на фиг. 4а показано на виде сбоку устройство, показанное на фиг. 3а-3b, в другом положении;
на фиг. 4b показан вид спереди устройства, показанного на фиг. 4а;
на фиг. 5а показан вид сбоку еще одного устройства рентгеновской визуализации в соответствии с настоящим изобретением;
на фиг. 5b показан вид спереди устройства, показанного на фиг. 5а;
на фиг. 6а показано на виде сбоку устройство, показанное на фиг. 5а-3b, в другом положении;
на фиг. 6b показан вид спереди устройства, показанного на фиг. 6а;
на фиг. 7 показан местный вид устройства рентгеновской визуализации, показанного на фиг. 5а-6b;
на фиг. 8 схематически показано сечение части устройства рентгеновской визуализации;
на фиг. 9а показан местный вид устройства рентгеновской визуализации, показанного на фиг. 1а-4b;
на фиг. 9b показан местный вид устройства рентгеновской визуализации, показанного на фиг. 5а-6b;
на фиг. 10 показано сечение узла устройства визуализации, показанного на фиг. 1a-4b;
на фиг. 11 показан местный вид устройства визуализации в соответствии с настоящим изобретением;
на фиг. 12 показан местный вид другой детали, показанной на фиг. 11, и
на фиг. 13 показан еще один пример детали, показанной на фиг. 11.
В настоящем документе размеры, значения, формы и геометрические термины (такие как перпендикулярность и параллельность), при использовании с такими словами, как «примерно» или другими подобными терминами, такими как «приблизительно» или «по существу», следует рассматривать, не учитывая ошибки измерения или погрешности, вызванные ошибками производства и/или изготовления и, прежде всего, не учитывая небольшое отклонение от значения, размера, формы или геометрической привязки, с которым они связаны. Например, указанные привязки, если они связаны со значением, предпочтительно обозначают отклонение не более 10% от указанного значения.
Кроме того, при использовании таких терминов, как «первый», «второй», «верхний», «нижний», «основной» и «вспомогательный», они не обязательно обозначают порядок, приоритет или относительное положение, но они могут использоваться просто для того, чтобы четко обозначить отличие разных компонентов друг от друга.
За исключением случаев, когда в явном виде указано иное, и исходя из приведенного ниже пояснения, следует понимать, что такие термины, как «обработка», «компьютер», «вычисление», «оценка» и т.п. относятся к действию и/или процессам компьютера или системы расчета, которая оперирует данными и/или обрабатывает данные, представленные в виде физических величин, например, электронных величин журналов регистрации компьютерной системы и/или запоминающих устройств, с получением других данных, представленных аналогично, например, в виде физических величин, в компьютерных системах, журналах регистрации или других устройствах для хранения, передачи или отображения информации.
На упомянутых графических материалах ссылочной позицией «1» в целом обозначено устройство рентгеновской визуализации в соответствии с настоящим изобретением.
Оно выполнено с возможностью использования как в сфере медицины, так и ветеринарии для выполнения рентгеновской визуализации по меньшей мере одной части внутренней анатомии пациента и преимущественно медицинского/ветеринарного лечения, такого как, например, хирургическая операция и лечение. В частности, устройство 1 визуализации выполнено с возможностью использования в сфере медицины и/или ветеринарии для выполнения рентгеновского анализа, компьютерной томографии, флюороскопии или других видов рентгеновского исследования, хирургической операции, терапии, или других видов медицинского и/или ветеринарного лечения/операций.
Устройство 1 рентгеновской визуализации имеет продольную ось 1а и содержит, главным образом, стол 2 для укладывания пациента; гентри 3, выполненный с возможностью выполнения рентгеновской визуализации и образующий область 3а для проведения исследования, в которой размещена по меньшей мере часть стола 2; несущую конструкцию 4, поддерживающую гентри 3 и стол 2 с удержанием стола 2 в поднятом положении таким образом, чтобы предпочтительно образовывать свободную камеру 4а; по меньшей мере один механический манипулятор 5, выполненный с возможностью перемещения медицинского инструмента относительно области 3а для проведения исследования и, таким образом, стола 2; и блок управления, выполненный с возможностью управления работой устройства 1 рентгеновской визуализации.
Стол 2 по существу полностью проницаемый для рентгеновских лучей и предпочтительно выполнен по меньшей мере частично из углеродного материала или другого материала, проницаемого для рентгеновских лучей.
Он подходит для поддержки пациента и содержит верхнюю поверхность 2а для размещения пациента, т.е. поверхность, которая при использовании обращена от пола.
Верхняя поверхность 2а выполнена с возможностью размещения ее практически параллельно продольной оси 1а и, в частности, полу.
Гентри 3 проходит в основном по кольцеобразной траектории протяжения, лежащей в основной плоскости протяжения гентри 3, которая проходит поперек и, более подробно, практически перпендикулярно продольной оси 1а.
Условно, кольцеобразная траектория протяжения имеет основную ось протяжения гентри 3, по существу совпадающую с продольной осью 1а.
Гентри 3, таким образом, имеет практически дугообразную форму, а его центр находится по существу на продольной оси 1а. В частности, он имеет С-образную форму и, предпочтительно, по существу О-образную форму, образуя, в результате этого, кольцеобразную и, если быть точнее, по существу цилиндрическую область 3а для проведения исследования.
Центр указанной области 3а для проведения исследования предпочтительно находится на продольной оси 1а.
Гентри 3 содержит источник 31, выполненный с возможностью испускания излучения, предпочтительно рентгеновских лучей; приемник 32, выполненный с возможностью приема излучения после его прохождения через область 3а для проведения исследования и, следовательно, пациента и стол 2; ротор 33, выполненный с возможностью установки на нем по меньшей мере источника 31 и приемника 32; статор 34, выполненный с возможностью установки на нем ротора 33; элемент 35 вращения ротора 33 относительно статора 34 вокруг продольной оси 1а, выполненный с возможностью определения траектории вращения источника 31 и приемника 32 вокруг области 3а для проведения исследования и, если быть точнее, по существу с центром на продольной оси 1а; и регулирующую и управляющую электронику источника 31, приемника 32 и других компонентов, находящихся на гентри 3.
Приемник 32, как показано на фиг. 9а и 9b, содержит по меньшей мере один датчик 321 рентгеновских лучей, имеющий поверхность, чувствительную к рентгеновским лучам, и выполненный с возможностью избирательного выполнения рентгеновского анализа, компьютерной томографии и/или флюороскопии; устройство 322 колебательного перемещения, выполненное с возможностью перемещения датчика рентгеновских лучей по оси 322а колебательного перемещения, практически параллельной чувствительной поверхности и, предпочтительно, практически по касательной к траектории вращения; и подъемную систему 323, выполненную с возможностью линейного перемещения датчика рентгеновских лучей по оси 323а подъема, практически перпендикулярной оси 322а колебательного перемещения.
В частности, ось 323а подъема практически перпендикулярна и, более конкретно, пересекается с продольной осью 1а.
Ось 322а колебательного перемещения по существу параллельна оси 323а подъема.
Датчик 321 рентгеновских лучей может содержать по меньшей мере одно из следующего: линейный датчик и, предпочтительно, два линейных датчика, имеющих чувствительные поверхности, по существу находящиеся в одной плоскости; датчик, работающий в прямоугольной плоскости, известный как плоская панель, предпочтительно выполненный с возможностью изменения протяженности активной чувствительной поверхности, т.е. части чувствительной поверхности, способной детектировать рентгеновские лучи; датчик подсчета прямых фотонов; датчик с двумя уровнями энергии; датчик вогнутости, обращенный к продольной оси 1а; датчик с переменной геометрией: плоский или вогнутый.
Устройство 322 колебательного перемещения содержит устройство сдвига, соединенное с датчиком 321 рентгеновских лучей, направляющую колебательного перемещения, имеющую ось 322а колебательного перемещения, и двигатель, предпочтительно электрический, управляющий перемещением устройства сдвига по направляющей колебательного перемещения.
Подъемная система 323 содержит линейный привод, предпочтительно электрический, выполненный с возможностью перемещения датчика 321 рентгеновских лучей и, предпочтительно, устройства колебательного перемещения, по оси 323а подъема.
Источник 31, как показано на фиг. 9а и 9b, содержит устройство 311 излучения рентгеновских лучей, имеющее ось излучения, и, в некоторых случаях, систему 312 наклона, выполненную с возможностью вращения устройства 311 излучения рентгеновских лучей вокруг оси наклона, которая соответственно практически параллельна продольной оси 1а, предпочтительно по существу удерживая фокальную точку (фокальное пятно) устройства излучения в по существу неподвижном положении.
Система 312 наклона содержит телескопический корпус, предпочтительно с электроприводом, шарнирно прикрепленный одним концом к устройству 311 излучения, а другим концом - к ротору 33, так, чтобы изменять его длину, вызывая вращение устройства 311 излучения вокруг оси наклона и, таким образом, изменение наклона оси излучения относительно чувствительной поверхности.
Расстояние между фокальной точкой и чувствительной поверхностью составляет по существу от 1,4 до 0,2 м.
Ротор 33 (фиг. 10, 9а и 9b) содержит пластину 33а ротора, с которой соединены источник 31 и, с противоположной стороны от источника 31 относительно продольной оси 1а, приемник 32; и кожух 33b ротора, выполненный с возможностью образования, совместно с пластиной 33а ротора, приемного объема ротора для источника 31 и приемника 32.
Пластина 33а ротора выполнена с возможностью консольной поддержки по меньшей мере источника 31 и приемника 32.
Кожух 33b ротора имеет такую форму, что он образует по меньшей мере один выступ, образующий, совместно с пластиной 33а статора, приемное пространство для источника 31 и приемника 32, и по меньшей мере одно углубление, образующее профиль кожуха 33b ротора и, таким образом, ротора 33, которое имеет меньшее протяжение, чем осевое протяжение выступа.
Термин «осевой» в данном случае обозначает, как и везде в настоящем документе, расстояние/длину/измерение, вычисленное вдоль продольной оси 1а.
В частности, кожух 33b ротора (фиг. 10) образует первый выступ 33с, образующий первое приемное отделение 3b для источника 31; второй выступ 33d, противоположный относительно продольной оси 1а первому выступу 33с и образующий второе приемное отделение 3с для приемника 32; и первое углубление 33е и второе углубление 33f, отделенные друг от друга выступами 33с и 33d и имеющие меньшее осевое протяжение, чем осевое протяжение выступов, и соответственно одинаковое осевое протяжение друг с другом.
Статор 34 (фиг. 10) выполнен с возможностью по существу консольного крепления ротора 33, который, таким образом, по существу расположен снаружи статора 34.
Статор 34 содержит пластину 34а статора, с которой соединена по меньшей мере управляющая электроника источника 31, приемника 32 и других компонентов, находящихся на роторе 33; кожух 34b статора, выполненный с возможностью образования совместно с пластиной 34а статора приемного пространства статора для управляющей электроники; и, предпочтительно, соединительную пластину 34с, соединенную с несущей конструкцией 4, удерживающей пластину 34а статора и, таким образом, кожух 34b статора.
Следует отметить, что пластины 33а и 34а расположены рядом друг с другом, а кожухи 33b и 34b расположены на противоположных сторонах пластин 33а и 34а.
Элемент 35 вращения содержит ведомое колесо, выполненное как единое целое с ротором 33; по меньшей мере один подшипник, позволяющий пластине 34а статора поддерживать пластину 33а ротора; и двигатель, предпочтительно электрический и оснащенный кодовым датчиком, который соединен с пластиной статора и выполнен с возможностью управления, например, посредством фрикционного колеса или ремня, вращением ведомого колеса и, таким образом, ротора 33.
Следует отметить, что канал обмена данными предусмотрен между управляющей электроникой, расположенной на пластине 34а статора, источником 31, приемником 32 и, если он присоединен к гентри 3, механическим манипулятором 5 и другими возможными компонентами, расположенными на пластине 33а ротора, причем гентри 3 содержит средство передачи (такое как гибкий кабельный канал или скользящие контакты), выполненное с возможностью образования канала обмена данными и/или энергией между статором 34 и ротором 33 во время возвратно-поступательного вращения; и, предпочтительно, один или несколько разделителей 35а, выполненных с возможностью размещения между пластинами 33а и 34а для создания приемного промежуточного пространства для указанного средства передачи.
Необязательно гентри 3 содержит, как единое целое с пластиной 33а ротора, по меньшей мере одно из системы 36 охлаждения источника 31 и позиционирующего средства 37, выполненного таким образом, чтобы помочь оператору, который может быть хирургом, отцентрировать гентри 3 и, таким образом, источник 31 и приемник 32 относительно стола 2 и, таким образом, пациента. Предпочтительно гентри 3 содержит как систему 36 охлаждения, так и позиционирующее средство 37.
Система 36 охлаждения консольно соединена с пластиной 33а ротора и расположена возле источника 31 и предпочтительно практически полностью находится в первом отделении 3b.
Позиционирующее средство 37 содержит один или несколько лазерных излучателей, выполненных с возможностью проецирования на стол 2 и, в частности, на пациента, оптической системы координат для центровки гентри 3.
Соответственно, позиционирующее средство 37 содержит первый лазерный излучатель, расположенный рядом с источником и предпочтительно проецирующий предпочтительно параллельно оси излучения сетку на стол 2; и два дополнительных лазерных излучателя, расположенных друг напротив друга и взаимно наклоненных так, чтобы проецировать предпочтительно перпендикулярно оси излучения на стол по существу линейный сегмент, параллельный продольной оси 1а.
В заключение следует отметить, что к пластине 33а ротора присоединен только источник 31, приемник 32, кабели для передачи данных/энергии, необязательно, механический манипулятор 5, как описано ниже, и, при их наличии, система 36 охлаждения и/или позиционирующее средство 37.
Механический манипулятор 5 выполнен с возможностью перемещения медицинского инструмента, такого как, например, источник излучения для радиотерапии, протез, имплантируемый в пациента, и/или хирургический инструмент (канюлю, скальпель и т.п.), относительно гентри 3 и, в частности, стола 2. Предпочтительно механический манипулятор 5 выполнен с возможностью перемещения направляющей детали хирургического инструмента.
Выражение «направляющая деталь» обозначает известный инструмент, выполненный с возможностью определения оси вмешательства, по которой оператор должен перемещать хирургический инструмент и предпочтительно величины хода указанного хирургического инструмента, обозначающей максимальную глубину, на которую хирургический инструмент может быть введен в пациента. Необязательно направляющая деталь может определять необязательную величину хода, указывающую, например, длину разреза/воздействия.
Альтернативно медицинский инструмент, перемещаемый посредством механического манипулятора 5, содержит средство видеозаписи, предпочтительно рентгеновского типа, выполненное с возможностью обеспечения рентгеновского просмотра рассматриваемого участка, такого как, например, просмотр хирургического инструмента, перемещающегося/воздействующего в рассматриваемой области.
Каждый механический манипулятор 5 содержит средства 51 зацепления по меньшей мере одного медицинского инструмента с механическим манипулятором 5.
Средства 51 зацепления выполнены как единое целое с медицинским инструментом, чтобы обеспечить возможность зацепления и перемещения уникального медицинского инструмента посредством механического манипулятора 5.
Альтернативно средства 51 зацепления выполнены с возможностью обеспечения возможности замены медицинского инструмента для подбора медицинского инструмента под тип выполняемой хирургической операции и/или терапии. Таким образом, они могут содержать одно из следующего: захват, выполненный с возможностью захвата или отпускания медицинского инструмента; и направляющую, выполненную с возможностью определения оси скользящего перемещения и, предпочтительно, величины хода скользящего перемещения инструмента относительно средств 51 зацепления и, таким образом, механического манипулятора 5.
Также следует отметить, что дополнительно средства 51 зацепления могут быть выполнены с возможностью управления и, более подробно, использования медицинского инструмента. Например, они могут управлять открыванием или закрыванием зажима или, посредством подходящего соединения, включением или отключением указанного средства видеозаписи.
Механический манипулятор 5 выполнен с возможностью перемещения средств 51 зацепления относительно гентри. С этой целью, механический манипулятор 5 является шарнирно-сочлененным и выполнен из кинематической цепи, разомкнутой или замкнутой, или частично замкнутой.
Механический манипулятор 5 может содержать один или несколько жестких элементов 52 с определенными сечениями и одно или несколько механических соединений 53, выполненных с возможностью перемещения, и, если быть точнее, взаимного вращения жестких элементов 52.
Среди жестких элементов 52 следует обозначить нижний жесткий элемент 52а, выполненный с возможностью соединения манипулятора с по меньшей мере одной кареткой или гентри; и верхний жесткий элемент 52b, выполненный как единое целое со средствами 51 зацепления.
Механические соединения 53 выполнены с возможностью перемещения и, если быть точнее, взаимного вращения жестких элементов 52, определяя сложенное положение механического манипулятора 5 (фиг. 2a-2b, 4a-4b, 6а-6b), в котором жесткие элементы 52 расположены рядом друг с другом, и, следовательно, механический манипулятор 5 сложен так, что средства 51 зацепления находятся вдали от стола 2 и, в частности, за пределами области 3а для проведения исследования, и по меньшей мере одно его разложенное положение (фиг. 1a-1b, 3а-3b, 5а-5b), в котором по меньшей мере часть жестких элементов 52 разведена друг от друга, и, таким образом, механический манипулятор 5 по меньшей мере частично развернут так, что средства 51 зацепления расположены в области 3а для проведения исследования и, в частности, рядом со столом 2.
В сложенном положении жесткие элементы 52 имеют углы взаимного расхождения, которые меньше, чем углы взаимного расхождения в разложенном положении, что необходимо для обеспечения минимальных размеров относительно указанного разложенного положения, вычисленные в основной плоскости протяжения гентри 3, т.е. меньше, чем в разложенном положении. Таким образом, в этом сложенном положении механический манипулятор 5 собран в компактную конфигурацию.
Если быть точнее, в сложенном положении механический манипулятор 5 практически полностью заключен в пределах проекций гентри 3 (фиг. 6а-6b) и, в частности, ротора 33 и, более точно, кожуха 33b ротора вдоль продольной оси 1а. Альтернативно (фиг. 2а-2b и 4а-4b) в сложенном положении механический манипулятор 5 имеет высоту, соответствующим образом вычисленную перпендикулярно к градиенту силы тяжести, которая по существу меньше высоты свободной камеры 4а.
В разложенном положении механический манипулятор 5 по меньшей мере частично разложен и, таким образом, имеет размеры, которые больше, чем указанные минимальные размеры.
Более подробно, он выступает из указанных проекций таким образом, что средства 51 зацепления размещаются в области 3а для проведения исследования и предпочтительно обращены к верхней поверхности 2а, т.е. стороне, противоположной основанию 41 относительно стола 2. В некоторых случаях (фиг. 1a-1b и 3а-3b) в разложенном положении механический манипулятор 5 может иметь высоту больше, чем у свободной камеры 4а, чтобы находиться в углублении 33е или 33f с размещением средств 51 в области 3а и соответственно обращенными к верхней поверхности 2а, т.е. стороне, противоположной основанию 41 относительно стола 2.
Следует отметить, что переход между двумя положениями или любое другое перемещение механического манипулятора 5 может быть выполнено в соответствии с непрямым кинематическим механизмом или прямым кинематическим механизмом. Таким образом, следует отметить, что, даже если это не выражено в явном виде, каждое перемещение механического манипулятора 5, описанное в настоящем документе, определяется посредством блока управления в соответствии с непрямым кинематическим механизмом или прямым кинематическим механизмом.
Выражение «непрямой кинематический механизм» означает траекторию в рабочем пространстве, т.е. вычисление пути конечного элемента механического манипулятора 5 (определяемого средствами 51 зацепления и, таким образом, медицинским инструментом). В результате блок управления определяет положение, скорость и ускорение отдельных механических соединений 53 для определения указанного пути конечного элемента механического манипулятора 5.
Выражение «прямой кинематический механизм» означает вычисление траектории в пространстве механического соединения, в котором определяются положение, скорость и ускорение отдельных механических соединений 53, а не путь конечного элемента механического манипулятора 5, в результате этого, путь конечного элемента механического манипулятора 5 не определен блоком, но представляет собой результат положения, скорости и ускорения механических соединений 53.
Механические соединения 53 выполнены с возможностью вращения независимо друг от друга и совместно с жесткими элементами 52 вокруг по меньшей мере одной оси вращения, предпочтительно практически перпендикулярно предпочтительным осям протяжения одного из двух смежных жестких элементов 52. В частности, механические соединения 53 выполнены с возможностью вращения независимо друг от друга и взаимно с жесткими элементами 52 вокруг двух разных осей вращения, каждая из которых предпочтительно проходит практически поперек, если быть точнее, практически перпендикулярно предпочтительной оси протяжения смежных жестких элементов 52.
Механические соединения 53 могут быть разных типов, с приводом или без привода, например, кроме прочего, это могут быть поворотные соединения, призматические, сферические, спиральные, цилиндрические или шарнирные соединения.
Дополнительно соединения 53 могут использоваться в приводах с регулируемой жесткостью, т.е. в приводе, установленном между двумя жесткими элементами 52 и/или между жестким элементом 52 и средством 51 и выполненном с возможностью возвратно-поступательного перемещения указанных выше двух компонентов за счет регулирования жесткости между ними. Пример привода с регулируемой жесткостью описан в абзацах [0030]-[0088] документа ЕР 2444207 и показан на фигурах 1-7 указанного документа ЕР 2444207. Эти страницы и указанные рисунки в патенте № ЕР 2444207 включены в настоящий документ посредством ссылки.
В механических соединениях 53 верхнее механическое соединение 53а расположено между верхним жестким элементом 52b и смежным жестким элементом 52.
Верхнее механическое соединение 53а выполнено с возможностью вращения верхнего жесткого элемента 52b и, следовательно, средства 51 зацепления относительно остальной части механического манипулятора 5 вокруг по меньшей мере оси, проходящей по существу поперек и, по существу, практически перпендикулярно предпочтительной оси протяжения указанного смежного жесткого элемента 52. Предпочтительно верхнее соединение 53а выполнено с возможностью вращения средств 51 зацепления относительно остальной части механического манипулятора 5 вокруг двух осей, которые проходят практически поперек, более предпочтительно перпендикулярно друг другу.
Каждое механическое соединение 53 и 53а содержит серводвигатель, т.е. электрический двигатель, оснащенный кодовым датчиком, выполненным с возможностью измерения угла вращения между жесткими элементами 52, 52а и 52b, заданным указанным двигателем, и постоянного поддержания такого угла.
Чтобы выполнить замену медицинского инструмента, перемещаемого механическим манипулятором 5, несущая конструкция 4 может быть оснащена загрузочной станцией, в которой может находиться множество медицинских инструментов, захватываемых механическим манипулятором 5 для использования.
Указанная загрузочная станция находится внутри свободной камеры 4а и, если быть точнее, соединена со стойкой 42, расположенной рядом с механическим манипулятором 5.
Альтернативно загрузочная станция расположена на механическом манипуляторе 5 и выполнена как единое целое с жестким элементом 52.
В качестве нового варианта механический манипулятор 5 может содержать по меньшей мере датчик 55 силы, выполненный с возможностью определения усилий или крутящих моментов, действующих на механический манипулятор 5.
Указанный по меньшей мере один датчик 55 силы для удобства восприятия показан только на фиг. 11-13.
За счет датчика 55 силы средства 51 зацепления и, следовательно, медицинский инструмент удается удержать в требуемом положении относительно исследуемого участка.
В результате обеспечивается эффективное осуществление по меньшей мере одного из перечисленных далее режимов управления: управление положением/скоростью, управление усилием/крутящим моментом, смешанное управление положением/усилием (положением на некоторых осях и усилием/крутящим моментом - на других), сопротивление вместо усилия/крутящего момента на одной или нескольких осях. Следует отметить, что под термином «оси» подразумеваются оси Декартовой системы координат, произвольно обозначенные внутри инструмента, средств 51 или в окружающей области (например, в пациенте).
Датчик 55 силы способен измерять усилия/крутящие моменты взаимодействия между медицинским инструментом и определяемой окружающей средой, предпочтительно, но не исключительно, пациентом и хирургом.
В частности, он выполнен с возможностью измерения усилия/крутящие моменты взаимодействия между пациентом и медицинским инструментом и определения на основании результатов измерения условия удержания для механического манипулятора 5, при котором механический манипулятор 5 будет удерживать средства 51 и, следовательно, медицинский инструмент в контакте с пациентом с воздействием на пациента определенным усилием/крутящим моментом и/или в определенном положении.
Альтернативно или дополнительно при соблюдении условия удержания механический манипулятор 5 удерживает средства 51 зацепления на определенном расстоянии от пациента.
Соответственно датчик 55 силы выполнен с возможностью измерения усилия/крутящие моменты взаимодействия механического манипулятора 5 с хирургом и определения для механического манипулятора 5 на основании результатов измерения условия отслеживания, при котором перемещения механического манипулятора 5 по существу пропорциональны усилиям/крутящим моментам, измеренным датчиком 55 силы и прикладываемых оператором, который может управлять манипулятором вручную.
Следует уточнить, как с помощью сигнала датчика 55 силы блок управления предоставляет оператору возможность перемещать посредством вращения и/или линейного перемещения механический манипулятор относительно одной или нескольких указанных осей.
В некоторых случаях блок управления может блокировать некоторые степени свободы, следовательно, медицинский инструмент обладает ограниченным количеством незаблокированных степеней свободы, поэтому датчик 55 силы обеспечивает осуществление по меньшей мере одного из указанных выше режимов управления только по незаблокированным степеням свободы. Например, блок управления может передавать на механический манипулятор 5 команду линейного перемещения вдоль оси только пропорционально усилию, измеренному датчиком 55 силы вдоль указанной оси, и передавать на механический манипулятор 5 команду противостоять усилиям, измеренным датчиком вдоль остальных осей, и крутящим моментам, рассчитанным по трем осям.
Преимущественно по меньшей мере один датчик 55 силы может измерять усилия/крутящие моменты взаимодействия между медицинским инструментом и пациентом, или усилия/крутящие моменты взаимодействия с хирургом, и/или комбинацию указанных усилий/крутящих моментов взаимодействия. Как следствие он может выборочно определять условие удержания и условие отслеживания.
По меньшей мере один датчик 55 силы соединен с блоком управления, который на основании данных, измеренных датчиком 55 силы, управляет механическим манипулятором 5 во время выполнения условия удержания и отслеживания.
Контроль над переходом из условия удержания в условие отслеживания может осуществляться оператором и/или автоматически на основании данных, определенных блоком управления.
Механический манипулятор 5 может содержать единственный датчик 55 силы, выполненный с возможностью измерения усилий/крутящих моментов взаимодействия между медицинским инструментом и пациентом, усилий/крутящих моментов взаимодействия с хирургом и, что более целесообразно, комбинацию указанных усилий/крутящих моментов взаимодействия. Предпочтительно указанный единственный датчик 55 силы расположен между верхним жестким элементом 52b и остальной частью механического манипулятора 5, точнее - между верхним жестким элементом 52b и верхним механическим соединением 53а (см. фиг. 11).
В этом случае блок управления по команде, переданной оператором, предписывает механическому манипулятору 5 задействовать одно из условий: условие поддержание или условие отслеживания. Альтернативно или дополнительно блок управления может автоматически (т.е. без вмешательства оператора) предписывать механическому манипулятору 5 задействовать одно из условий: условие удержания или условие отслеживания.
Предпочтительно механический манипулятор 5 может содержать рукоятку 56 для захвата оператором, с помощью которой он сможет перемещать механический манипулятор 5.
Для удобства восприятия рукоятка 56 показана только на фиг. 11-13.
Указанный рукоятка 56 выполнена как единое целое с верхним жестким элементом 52b и расположена после датчика 55 силы. Используемый в настоящем документе термин «после» означает, что рукоятка расположена вдоль кинематической цепи, образованной механическим манипулятором 5, ближе к средствам 51 зацепления, чем датчик 55 силы.
Альтернативно механический манипулятор 5 может содержать два датчика 55 силы, так что усилия/крутящие моменты взаимодействия между медицинским инструментом и пациентом и усилия/крутящие моменты взаимодействия с хирургом измеряются указанными двумя датчиками 55 силы независимо друг от друга, за счет чего осуществляется их автоматическое распознавание.
В этом случае блок управления, выполненный с возможностью отличения усилий/крутящих моментов взаимодействия между медицинским инструментом и пациентом от усилий/крутящих моментов взаимодействия с хирургом, может автоматически предписывать механическому манипулятору 5 задействовать одно из условий: условие удержания или условие отслеживания.
Чтобы усилия/крутящие моменты взаимодействия между медицинским инструментом и пациентом и усилия/крутящие моменты взаимодействия с хирургом действовали независимо друг от друга, два датчика 55 силы не контактируют друг с другом. В частности, они отделены друг от друга одним или несколькими жесткими элементами 52, 52а и 52b, предпочтительно единственным жестким элементом 52 или 52b, более предпочтительно верхним жестким элементом 52b.
Соответственно, механический манипулятор 5 может содержать рукоятку 56 для захвата оператором, с помощью которой он сможет перемещать механический манипулятор 5.
В соответствии с первым неограничивающим примером (см. фиг. 12) расположения двух датчиков 55 силы датчик 55 силы находится между рукояткой 56 и верхним элементом 52b, за счет чего он измеряет практически исключительно усилия/крутящие моменты взаимодействия с хирургом; другой датчик 55 силы находится между верхним элементом 52b и верхним соединением 53а, за счет чего он измеряет и усилия/крутящие моменты взаимодействия между медицинским инструментом и пациентом, и усилия/крутящие моменты взаимодействия с хирургом.
Следует отметить, что согласно этому примеру в случае одновременного действия усилий/крутящих моментов взаимодействия между медицинским инструментом и пациентом и усилий/крутящих моментов взаимодействия с хирургом блок управления может определять усилия/крутящие моменты взаимодействия между медицинским инструментом и пациентом на основании разницы показаний двух датчиков 55 силы.
В соответствии со вторым неограничивающим примером (см. фиг. 13) расположения двух датчиков 55 силы датчик 55 силы находится между рукояткой 56 и верхним жестким элементом 52b, за счет чего он измеряет практически исключительно усилия/крутящие моменты взаимодействия с хирургом; другой датчик 55 силы находится между верхним элементом 52b и средствами 51 зацепления, за счет чего он измеряет практически исключительно усилия/крутящие моменты взаимодействия между медицинским инструментом и пациентом.
В соответствии с третьим неограничивающим примером расположения двух датчиков 55 силы датчик 55 силы находится между верхним элементом 52b и верхним соединением 53а, за счет чего он измеряет и усилия/крутящие моменты взаимодействия между медицинским инструментом и пациентом, и усилия/крутящие моменты взаимодействия с хирургом; другой датчик 55 силы находится между верхним элементом 52b и средствами 51 зацепления, за счет чего он измеряет практически исключительно усилия/крутящие моменты взаимодействия между медицинским инструментом и пациентом. В этом случае рукоятка 56 и жесткий верхний элемент 52b могут быть выполнены как единое целое.
Следует отметить, что согласно третьему примеру (как и в первом примере) в случае одновременного действия усилий/крутящих моментов взаимодействия между медицинским инструментом и пациентом и усилий/крутящих моментов взаимодействия с хирургом блок управления может определять усилия/крутящие моменты взаимодействия между медицинским инструментом и пациентом на основании разницы показаний двух датчиков 55 силы.
Необязательно механический манипулятор 5 может содержать дополнительный датчик 55 силы, расположенный на средствах 51 зацепления, за счет сего он контактирует с медицинским инструментом и/или пациентом.
Указанный дополнительный датчик 55 силы по существу аналогичен датчику 55 силы, описанному выше.
Несущая конструкция 4 содержит основание 41, выполненное с возможностью размещения на нем гентри 3; по меньшей мере одну опору 42, выполненную с возможностью поддержки стола 2 в поднятом положении относительно основания 41; направляющую 43, выполненную как единое целое с основанием 41 и образующую ось 43а линейного перемещения, практически параллельную продольной оси 1а; и по меньшей мере одну каретку 44, находящуюся в зацеплении с направляющей 43 и выполненную с возможностью перемещения гентри 3 и механического манипулятора 5 вдоль оси 43а линейного перемещения.
Направляющая 43 может содержать, например, ходовой винт для линейного перемещения по меньшей мере одной каретки 44 по существу вдоль оси 43а линейного перемещения; и двигатель, желательно электрический, задающий вращение ходового винта вокруг оси 43а линейного перемещения и, следовательно, перемещение по меньшей мере одной каретки 44 вдоль указанной оси 43а.
Соответственно, конструкция 4 может содержать колеса 45, предпочтительно поворачивающиеся, выполненные с возможностью размещения между полом и основанием 41 для перемещения устройства 1.
Основание 41 и по меньшей мере одна опора 42 образуют свободную камеру 4а. Более подробно, свободная камера 4а образована внизу, т.е. рядом с полом, посредством основания 41; вдоль боковой стороны опоры 42; если есть, вдоль второй боковой стороны, расположенной напротив первой стороны второй опоры 42; и необязательно над столом 2. Соответственно, она характеризуется двумя открытыми поперечными сечениями для доступа к указанной камере, выполненной практически параллельно продольной оси 1а и, в частности, практически перпендикулярно верхней поверхности 2а.
По меньшей мере одна каретка 44 связана с гентри 3 (через соединительную планку 34с) и с механическим манипулятором 5, а также находится в зацеплении с направляющей 43 с возможностью скользящего перемещения по ней для перемещения гентри 3 и механического манипулятора 5 вдоль оси 43а линейного перемещения.
Следует отметить, что механический манипулятор 5, как будет описано ниже, может быть соединен непосредственно с по меньшей мере одной кареткой 44 (см. фиг. 1А, 1b, 2а, 2b, 3а, 3b, 4а, 4b). Альтернативно (как будет описано ниже) механический манипулятор 5 может быть опосредованно соединен с по меньшей мере одной кареткой 44 и, в частности, может быть соединен с гентри 3 (фиг. 5А, 5b, 6а и 6b), который за счет соединения с по меньшей мере одной кареткой 44 сопрягает механический манипулятор 5 с по меньшей мере одной кареткой 44 для ее перемещение вдоль оси 43а линейного перемещения.
Как будет отмечено ниже, используемое в настоящем документе выражение «соединен непосредственно» (далее - просто «соединен») означает отсутствие между компонентами, соединенными друг с другом, других компонентов, за исключением компонентов, факультативно необходимых для создания такого соединения. И наоборот, используемое в настоящем документе выражение «соединен опосредовано» (далее - просто «связан») означает наличие между компонентами, соединенными друг с другом, других компонентов в добавок к компонентам, факультативно необходимым для создания такого соединения (например, на фиг. 5а, 5b, 6а и 6b механический манипулятор 5 связан с по меньшей мере одной каретка 44 поскольку между ними находится гентри 3).
В случае непосредственного соединения механического манипулятора 5 с по меньшей мере одной кареткой 44 несущая конструкция 4 может содержать единственную каретку 44 (см. фиг. 1a, 1b, 2а и 2b), с которой соединены и гентри 3, и механический манипулятор 5 для одновременного перемещения гентри 3 и механического манипулятора 5 вдоль оси 43а линейного перемещения.
В соответствии со вторым примером, механический манипулятор 5 соединен непосредственно с по меньшей мере одной кареткой 44, и в этом случае несущая конструкция 4 может содержать две каретки (см. фиг. 3а, 3b, 4а и 4b), т.е. первую каретку 44а, соединенную с гентри 3 и выполненную с возможностью перемещения гентри 3 вдоль оси 43а линейного перемещения, и вторую каретку 44b, соединенную с механическим манипулятором 5 и выполненную с возможностью перемещения механического манипулятора 5 вдоль оси 43а независимо от гентри 3.
В этом случае первый каретка 44а и вторая каретка 44b могут быть выполнены с возможностью скользящего перемещения независимо друг от друга вдоль оси 43а линейного перемещения, если быть точнее с возможностью перемещения от привода.
Необязательно, и в случае с единственной кареткой 44, и в случае с двумя каретками 44а и 44b несущая конструкция 4 может содержать по меньшей мере один приводной механизм 46 для каждого механического манипулятора 5, расположенный между механическим манипулятором 5 и соответствующей кареткой 44 или 44b и выполненный с возможностью перемещения и, в частности, по меньшей мере линейного перемещения механического манипулятора 5 относительно указанной каретки 44 или 44b.
Приводной механизм 46 выполнен с возможностью перемещения механического манипулятора 5 вдоль по меньшей мере одной из осей: оси 46а скользящего перемещения и оси 46b приближения, которые проходят практически поперечно и предпочтительно по существу перпендикулярно друг к другу.
Соответственно приводной механизм 46 выполнен с возможностью перемещения механического манипулятора 5 только вдоль оси 46а скользящего перемещения или только вдоль оси 46b приближения. Альтернативно приводной механизм 46 выполнен с возможностью перемещения механического манипулятора 5 вдоль оси 46а скользящего перемещения и оси 46b приближения.
Ось 46а скользящего перемещения и ось 46b приближения практически параллельны поверхности 2а.
Ось 46а скользящего перемещения проходит по существу поперечно, в частности перпендикулярно продольной оси 1а, тем самым позволяя приводному механизму 46 определить неподвижное положение (см. фиг. 2b и 4b), в котором механический манипулятор 5 находится практически полностью внутри свободной камеры 4а, и рабочее положение (см. фиг. 1b и 3b), в котором он по меньшей мере частично выступает из камеры 4а через одну из открытых сторон. Предпочтительно ось 46а скользящего перемещения расположена практически горизонтально, т.е. перпендикулярно градиенту силы тяжести.
Соответственно ход приводного механизма вдоль ось 46b скользящего перемещения по меньшей мере равен ширине поверхности 2а, рассчитанной перпендикулярно продольной оси 1а, что обеспечивает два рабочих положения и, следовательно, позволяет механическому манипулятору 5 выступать из камеры 4а через каждую из свободных сторон. Альтернативно устройство 1 может содержать два манипулятора 5, каждый из которых находится рядом со свободной стороной и направлен к столу 2 с противоположных сторон.
Ось 46b приближения по существу параллельна продольной оси 1а, за счет чего приводной механизм 46 может менять, по меньшей мере в случае с единственной кареткой 44, расстояние между ротором 33 и механическим манипулятором 5. Предпочтительно ось 46b приближения расположена практически перпендикулярно градиенту силы тяжести.
Необязательно приводной механизм 46 содержит поворотный стол или другой аналогичный механизм, выполненный с возможностью вращения механического манипулятора 5 вокруг оси 46с вращения предпочтительно, практически перпендикулярный продольной оси 1а, более предпочтительно практически вертикальный (т.е. практически параллельно градиенту силы тяжести).
Более подробно ось 46с вращения по существу перпендикулярна оси 46а и 46b.
Альтернативно соединению с кареткой 44 или 44b, механический манипулятор 5 может быть соединен с гентри 3 и, если быть точнее, с ротором 33, соответственно, за счет чего обеспечивается его расположение на противоположной статору 34 стороне относительно пластины 33а ротора.
Более предпочтительно устройство 1 содержит по меньшей мере один механический манипулятор 5, соединенный с ротором 33 соответственно одному из углублений 33е и 33f, более предпочтительно два манипулятора 5, каждый из которых соединен с ротором 33 соответственно углублению 33е и 33f.
Механический манипулятор 5 неразрывно соединен с кожухом 33b ротора или предпочтительно неразрывно соединен с пластиной 33а ротора, не показанной на фигуре, и в кожухе ротора выполнено отверстие 33g, через которое механический манипулятор 5 выступает из кожуха 33b ротора, самопозиционируясь в одном из углублений 33е и 33f.
В частности, механический манипулятор 5, как показано на фиг. 7 и 9b, содержит соединительную платформу 54, выполненную с возможностью соединения механического манипулятора 5 с пластиной 33а ротора и, если быть точнее, нижним жестким элементом 52а, по меньшей мере частично расположенным в роторе, так что он выступает из него через отверстие в кожухе 33b ротора.
Нижний жесткий элемент 52а характеризуется наличием предпочтительной оси протяжения, проходящей по существу поперечно, в частности, по существу перпендикулярно пластине ротора, в частности, по существу параллельно продольной оси 1а.
Указанная соединительная платформа 54 предпочтительно является вращательной, поэтому образует ось 54а вращения нижнего жесткого элемента 52а и, следовательно, механического манипулятора 5. Ось 54а вращения проходит практически поперечно, в частности, практически перпендикулярно пластине 33а ротора, более конкретно, по существу параллельна продольной оси 1а. Более конкретно, ось вращения проходит по существу параллельно, если быть точнее, по существу совпадает с предпочтительной осью нижнего жесткого элемента 52а.
Соответственно жесткие элементы 52 выполнены прямолинейными.
Предпочтительно один или несколько жестких элементов 52 выполнены телескопическими, т.е. выполнены с возможностью изменения длины. Более предпочтительно, по меньшей мере нижний жесткий элемент 52а выполнен телескопическим для изменения его протяженности вдоль предпочтительной оси протяженности, перемещая жесткие элементы 52, направленные к кожуху 33b ротора, относительно указанного кожуха 33b ротора и средства 51 зацепления вдоль продольной оси 1а.
Блок управления соединен с другими компонентами устройства 1 посредством кабельного и/или беспроводного соединения для отправки команд и управления работой и перемещением по меньшей мере гентри 3 и механического манипулятора 5 в соответствии с непосредственным и/или опосредованным кинематическим механизмом, описанным выше.
Он содержит управляющую карту, выполненную с возможностью автоматического мониторинга устройства 1 рентгеновской визуализации и управления им, а также связывания компонентов (сенсорного экрана, клавиатуры и т.п.), предоставляющих оператору возможность управлять устройством 1 и, необязательно, просматривать и анализировать радиологическое изображение.
Кроме того, блок управления содержит интерфейсный робот, с помощью которого можно определять и управлять в любой момент времени положением медицинского инструмента и механического манипулятора 5 во время их работы, например, углом наклона между смежными жесткими элементами 52 и средствами 51 зацепления относительно смежных жестких элементов 52 (и необязательно длиной элементов 52); и соответственно базу данных инструментов для определения инструментов и их положения в загрузочной станции с целью из выбора.
И наконец, устройство 1 визуализации может содержать устройство 6 мониторинга, выполненное с возможностью мониторинга состояния механического манипулятора 5 для того, чтобы блок управления мог определять положение отдельных жестких элементов 52 и, как следствие, механического манипулятора 5 во избежание столкновений с другими объектами или с оператором.
Устройство 6 мониторинга содержит средства отображения/навигации (далее - просто «средства отображения») механического манипулятора 5, выполненные с возможностью видеозаписи по меньшей мере области 3а для проведения исследования, т.е. части стола 2, соответствующей точке проведения операции и, следовательно, части тела пациента, на которой используется медицинский инструмент.
В некоторых случаях устройство 6 мониторинга содержит один или несколько маркеров, предпочтительно оптических, для сообщения о пространственном расположении объекта, расположенного рядом с устройством.
Более подробно, устройство 6 мониторинга может содержать один или несколько маркеров, выполненных как единое целое с механическим манипулятором 5 и, в частности, жесткими элементами 52. Альтернативно устройство 6 мониторинга может содержать один или несколько маркеров, расположенных на медицинском инструменте, благодаря которым средства отображения могут отслеживать и, следовательно, сообщать о пространственном расположении во время перемещения и захвата оператором медицинского инструмента, удерживаемого механическим манипулятором 5. Альтернативно устройство 6 мониторинга может содержать один или несколько маркеров, выполненных как единое целое с механическим манипулятором 5, и один или несколько маркеров, расположенных на медицинском инструменте.
Средства отображения соединены с ротором 33 и, в частности, с одним из выступов 33с и 33d, более конкретно с верхней частью выступа 33с и 33d, видимых на поверхности или в точке кожуха 33 ротора, расположенной на максимальном расстоянии по оси от статора 34.
Более подробно, средства отображения соединены с ротором 33 на по меньшей мере одном из выступов 33с и 33d снаружи кожуха 33b ротора и, следовательно, не внутри отделения 3b или 3с. Альтернативно они расположены внутри отделения 3b или 3с, которое предпочтительно оснащено оптическим окном, через которое средства отображения, расположенные в отделении, осуществляют видеозапись по меньшей мере механического манипулятора 5.
Предпочтительно устройство 6 мониторинга содержит единственное средство отображения, расположенное на первом выступе 33с. Альтернативно указанное единственное средство отображения расположено на втором выступе 33d. Альтернативно устройство 6 содержит два средства отображения, каждое из которых расположено снаружи или внутри выступов 33с и 33d, на верхней части выступов 33с и 33d.
Средства отображения являются оптическими и предпочтительно идентифицируемые камерой.
Более того, устройство 6 мониторинга может содержать приводной механизм для каждого средства отображения для их перемещения относительно ротора 33.
Приводной механизм содержит по меньшей мере одно из следующего: линейный привод, выполненный с возможностью управления линейным перемещением средств отображения вдоль оси, предпочтительно по существу параллельной продольной оси 1а, более предпочтительно по существу перпендикулярной оси излучения; вращательное устройство, выполненное с возможностью создания команды для вращения средств отображения вокруг оси, практически перпендикулярной продольной оси 1а, более предпочтительно оси излучения источника.
Необязательно приводной механизм содержит и линейный привод, и вращательное устройство.
Устройства рентгеновской визуализации, конструкция которого описана выше, работает следующим образом.
Изначально механический манипулятор 5 устройства 1 визуализации находится в сложенном положении.
После размещения пациента на столе 2, в частности, по меньшей мере частично в области 3а для проведения исследования, оператор отправляет команду для начала визуализации (например, томографии), оценивает трехмерную томографическую модель и намечает точку проведения операции и траекторию, в частности координаты и/или наклон, под которым медицинский инструмент должен находиться относительно пациента и, следовательно, стола 2.
После подтверждения такого выбора блок управления, будь то автоматически или в ответ на команду оператора, определяет на основании базы данных робота траекторию для достижения требуемого положения. Например, он рассчитывает взаимные углы между жесткими элементами 52, 52а и 52b, которые необходимы для определения требуемого разложенного положения механического манипулятора 5, в котором медицинский инструмент можно будет расположить в точке проведения операции.
Следует отметить, что путь, который повторяет механический манипулятор 5, а также любое другое перемещение, описанное в настоящем документе, может быть определен по непосредственному и/или опосредованному кинематическому механизму, описанному выше.
Блок управления может выбирать траекторию в операционном пространстве или траекторию в пространстве соединения автоматически или на основании команды оператора.
Соответственно, блок управления проверяет наличие правильного медицинского инструмента, связанного со средствами 51 зацепления, и при необходимости запрашивает замену инструмента.
При замене инструмента блок управления инициирует линейное перемещение каретки 44, двигая механический манипулятор 5 в направлении загрузочной станции, где выгружает инструмент из средств 51 и берет медицинский инструмент, необходимый для операции.
После определения требуемого разложенного положения и проверки наличия правильного медицинского инструмента, связанного со средствами 51 зацепления, блок управления отправляет команду линейного перемещения механического манипулятора 5 из сложенного состояния в указанное требуемое разложенное состояние.
Затем, если манипулятор соединен с гентри 3, блок управления предписывает ротору 33 вращаться вокруг продольной оси 1а, устанавливая механический манипулятор 5 в требуемое положение.
Альтернативно, если несущая конструкция 4 оснащена двумя каретками, блок управления предписывает второй каретке 44b, а если несущая конструкция 4 оснащена единственной кареткой 44, то каретке 44, осуществлять скользящее перемещение вдоль оси 43а линейного перемещения до тех пор, пока механический манипулятор 5 не займет правильное положение. В то же время блок управления может отправить команду на гентри 3 переместить углубление 33е или 33f в направлении механического манипулятора 5 и/или приводного механизма 46 для перемещения механического манипулятора 5 вдоль оси 46а скользящего перемещения, способствуя выходу из свободной камеры 4а и, следовательно, достижения средствами 51 точки проведения операции.
В этот момент блок управления предписывает механическому манипулятору 5 перейти из сложенного положения в требуемое разложенное положение, т.е. заставляет механические соединения 53 взаимно вращать жесткие элементы 52 до тех пор, пока не будут достигнуты указанные взаимообратные углы наклона.
В результате механический манипулятор 5, ведомый блоком управления, начинает двигаться в направлении области 3а для проведения исследования через одно из углублений 33е и 33f до тех пор, пока средства 51 зацепления не достигнут области 3а для проведения исследования, в частности, над поверхностью 2а, т.е. точкой проведения операции.
Достижение разложенного положения завершается верхним механическим соединением 53 а, которое за счет вращения средств 51 зацепления устанавливает медицинский инструмент под правильным наклоном относительно стола 2 и, следовательно, пациента.
Необязательно блок управления может предписывать механическому манипулятору 5 занимать требуемое разложенное положение за счет изменения, помимо взаимообратного наклона жестких элементов 52, длины одного или нескольких телескопических жестких элементов 52.
Следует отметить, что механический манипулятор 5 размещает средства 51 и, как следствие, медицинский инструмент между выступами 33с и 33d, т.е. между источником 31 и приемником 32, обеспечивая выполнение радиологического сбора данных средствами 51 зацепления и медицинским инструментом, расположенных над точкой проведения операции. Такое расположение средств 51 зацепления между выступами 33с и 33d также способствует отображению указанных средств 51 зацепления на устройстве 6.
Перемещение механического манипулятора 5 также записывается устройством 6 мониторинга, которое, осуществляя видеозапись области проведения операции, дает блоку управления возможность проверять положение механического манипулятора 5 и, следовательно, предотвращать удары или столкновения с другими объектами или оператором.
В этот момент начинается хирургическая операция.
Оператор выбирает, например, скальпель, проникает к точке проведения операции через углубление 33е и 33f, расположенное напротив углубления, в котором находится механический манипулятор 5, вставляет медицинский инструмент, размещая его на требуемой глубине, и делает надрез требуемой длины.
Необязательно такая операция с надрезом может выполняться под руководством блока управления, который, используя введенную оператором информацию, определяет операционную траекторию и длину, а также на основании этих параметров предписывает сдвиг средств 51 зацепления вдоль указанного пути.
Такой сдвиг достигается за счет вращения между жесткими элементами 52 и/или ротором 33 и/или линейного перемещения каретки 44 или 44b.
Наконец, для повышения эффективности операции на протяжении всей хирургической операции радиологическое устройство 1 может выполнять рентгенологическое исследование (предпочтительно рентгеноскопию), результаты которого используются в блоке управления для отслеживания перемещения, например из-за дыхания, точки проведения операции и для использования механического манипулятора 5 для удержания медицинского инструмента в правильном положении, независимо от указанных перемещений.
Устройство рентгеновской визуализации, конструкция и функции которого были описаны выше, позволяет осуществлять инновационный способ применения.
Такой способ применения предусматривает стадию позиционирования механического манипулятора 5 в пространственном положении, стадию удержания пространственного положения медицинского инструмента и, необязательно, одну или несколько стадий повторения пространственного позиционирования.
На стадии позиционирования оператор определяет требуемое положение медицинского инструмента относительно стола 2 и, следовательно, пациента, который может быть на нем размещен.
На этой стадии оператор перемещает механический манипулятор 5, устанавливая медицинский инструмент в требуемое пространственное положение.
На основании сигналов, полученных от по меньшей мере одного датчика 55 силы, или по команде оператора Блок управления автоматически устанавливает механический манипулятор 5 в режим выполнения условия отслеживания.
Говоря точнее, в случае двух датчиков 55 силы блок управления может отличать усилие, оказываемое на механический манипулятор 5 оператором, от усилия, оказываемого пациентом, поэтому может устанавливать механический манипулятор 5 в режим выполнения условия отслеживания. В случае одного датчика 55 силы оператор предписывает блоку управления воздействовать усилием на механический манипулятор 5, чтобы блок управления мог установить механический манипулятор 5 в режим выполнения условия отслеживания.
В частности, для перемещения механического манипулятора 5 и, в частности, средств 51 зацепления оператор воздействует на них усилием. Это усилие определяется по меньшей мере одним датчиком 55 силы, которые отправляет сигнал на блок управления, который в ответ на такой сигнал отправляет на механический манипулятор 5 команду перемещения под управлением оператора.
Более конкретно, по меньшей мере один датчик 55 силы обнаруживает по каждой оси обнаружения компоненты усилия/крутящего момента, действующие на механический манипулятор 5, и отправляет эти компоненты в блок управления, который обеспечивает смещение в каждом направлении, пропорциональное указанным компонентам.
После того, как оператор прекращает воздействовать на манипулятор, блок управления, заметив отсутствие усилия со стороны оператора, устанавливает механический манипулятор 5 в режим выполнения условия удержания. Альтернативно вслед за командой оператора блок управления отправляет команду на переход в режим выполнения условия удержания.
Говоря точнее, в случае двух датчиков 55 силы блок управления может отличать усилие, оказываемое на механический манипулятор 5 пациентом, от усилия, оказываемого пациентом, поэтому может устанавливать механический манипулятор 5 в режим выполнения условия удержания. В случае одного датчика 55 силы оператор предписывает блоку управления прекратить воздействовать усилием на механический манипулятор 5, чтобы блок управления мог установить механический манипулятор 5 в режим выполнения условия удержания.
Затем блок управления сохраняет данные о положении механического манипулятора 5. Более конкретно, после завершения позиционирования механического манипулятора 5, т.е. когда оператор уже никак не перемещает манипулятор, блок управления блокирует механический манипулятор 5 и сохраняет данные, поступающие от по меньшей мере одного датчика 55 силы, о давлении, действующем на него, т.е. между пациентом и механическим манипулятором 5.
Альтернативно стадия позиционирования может быть выполнена блоком управления, который, соответственно, на основании команд оператора предписывает механическому манипулятору 5 занять требуемое пространственное положение.
После сохранения данных о пространственном положении механического манипулятора 5 и, в частности, о давлении, обнаруженном по меньшей мере одним датчиком 55 силы, стадия позиционирования завершается и начинается стадия удержания пространственного положения.
На этой стадии механический манипулятор 5 остается в условии удержания.
Теперь блок управления использует данные, полученные от по меньшей мере одного датчика 55 силы, для удержания в правильном положении механического манипулятора 5 и, следовательно, средств 51 зацепления и связанного с ним медицинского инструмента.
В частности, блок управления предписывает манипулятору перемещаться таким образом, чтобы сохранять значение давления, установленное датчиком 55, по существу постоянным, даже при перемещении пациента, вызванного, например, дыханием.
Альтернативно стадия позиционирования и стадия обучения могут быть выполнены с помощью медицинского инструмента с маркерами и предпочтительно по меньшей мере одного датчика 55 силы, соединенного с блоком управления для передачи данных. В этом случае на стадии позиционирования оператор захватывает и устанавливает медицинский инструмент, не прикрепленный к механическому манипулятору 5, в требуемое пространственное положение, в результате чего средство отображения, используя маркеры на медицинском инструмента, записывает пространственное положение медицинского инструмента. Кроме того, он может устанавливать медицинский инструмент в контакт с пациентом с определенным давлением, определяемым по меньшей мере одним датчиком 55 силы и передаваемым на блок управления.
По завершении стадии удержания начинается стадия прекращения движения.
На этой стадии оператор перемещает механический манипулятор 5, и, следовательно, блок управления, обнаруживший такое усилие с помощью по меньшей мере одного датчика 55 силы, предписывает механическому манипулятору 5 подчиняться оператору во время удаления от сохраненного пространственного положения.
Альтернативно в ответ на команду оператора блок управления предписывает механическому манипулятору 5 вернуться в исходное положение.
В это время, если оператор хочет, чтобы механический манипулятор 5 снова занят сохраненное пространственное положение, способ применения может предусматривать по меньшей мере одну стадию повторения стадии позиционирования и стадии удержания.
На этой стадии оператор, по существу и по меньшей мере частично повторяя стадию позиционирования, устанавливает механический манипулятор 5, если быть точнее, средства 51 зацепления и, следовательно, медицинский инструмент в предыдущее сохраненное пространственное положение.
С помощью серводвигателей механических соединений 53 и 53а и/или устройства 6 мониторинга блок управления идентифицирует, что сохраненное пространственное положение было достигнуто, поэтому отправляет команду выполнить стадию удержания.
Альтернативно в ответ на соответствующую команду оператора механический манипулятор 5 может автоматически записать такое положение.
В этом случае, используя данные, сохраненные на предыдущей стадии позиционирования, блок управления автоматически или на основании команды оператора предписывает медицинскому инструменту занять пространственное положение, сохраненное в памяти, и с помощью датчика 55 силы устанавливает и удерживает медицинский инструмент в положение с правильным давлением в месте контакта с пациентом.
Настоящее изобретение обеспечивает существенные преимущества.
Первое существенное преимущество заключается в том, что механический манипулятор 1, соединенный с одним из каретки и гентри 3, занимает абсолютное и окончательное пространственное положение относительно указанного гентри 3, что исключает необходимость в сложных и трудоемких измерительных системах, находящихся за пределами устройства.
Более того, преимущество этого аспекта дополнительно увеличивается за счет конкретной формы ротора 33, благодаря которой механический манипулятор 5 может входить в область 3а для проведения исследования через углубление 33е или 33f, а в некоторых случаях соединять механический манипулятор 5 с ротором в углублении 33f или 33е.
Если, например, оператору необходимо занять положение, прегражденное механическим манипулятором 5, с помощью средств отображения блок управления определяет такую потенциальную опасность и предписывает механическому манипулятору 5 и/или ротору 33 переместиться, чтобы оператор мог занять необходимое положение без перемещения средств 51 зацепления и, следовательно, медицинского инструмента относительно точки проведения операции.
Это состояние достигается за счет введения механического манипулятора 5 в конструкцию устройства 1 и за счет наличия блока управления, выполненного с возможностью отправлять команды на гентри 3 и механический манипулятор 5, тем самым синхронизируя перемещение гентри 3 и механического манипулятора 5.
Следует отметить, что такое преимущество усиливается расположением на медицинском инструменте одного или нескольких маркеров, за счет которых блок управления может определять положение оператора даже во время перемещения и захвата медицинского инструмента непосредственно оператором без помощи механического манипулятора 5.
Существенное преимущество обеспечивается инновационным расположением средств отображения на роторе 33, в частности на выступе 33с и/или 33d, благодаря чему на указанных средствах будет отображаться точка проведения операции без риска создания оператором и/или другими элементами преграды для отображения, препятствующей правильному отображению участка.
К тому же, если, например, оператор перемещается, заслоняя угол обзора средства отображения, блок управления обнаруживает невозможность надлежащего обзора манипулятора средством отображения и предписывает ротору 33 повернуться для установки средства отображения в оптимальное положение для обзора механического манипулятора 5.
Такое преимущество достигается за счет использования приводного механизма, который, перемещая средства отображения относительно ротора 33, обеспечивает для указанных средств отображения оптимальный обзор механического манипулятора 5.
Более того, в результате расположения средств отображения относительно ротора 33 и, в частности, выступов 33с и/или 33d механический манипулятор 5 и средства отображения занимают абсолютное и однозначное пространственное положение относительно друг друга, исключая необходимость в продолжительных калибровках или регулировках их относительного положения.
Следует отметить, что такое преимущество усиливается расположением на медицинском инструменте одного или нескольких маркеров, за счет которых блок управления может определять положение инструмента даже во время перемещения и захвата медицинского инструмента непосредственно оператором без помощи механического манипулятора 5.
Другое преимущество заключается в том, что механический манипулятор 5, соединенный с ротором 33 и, в частности, расположенный в углублении 33е или 33f, беспрепятственно может получать доступ ко всем частям тела пациента, при этом оператору не нужно перемещаться или отвлекаться, тем самым замедляя процесс операции или вмешиваясь в структуру кабелей и трубок, подключенных к пациенту.
Существенное преимущество заключается в том, что устройство 1 визуализации, используя ту же направляющую 43 для перемещения гентри 3 и механического манипулятора 5, имеет простую конструкцию и экономично.
Более того, использование той же направляющей 43 для перемещения гентри 3 и механического манипулятора 5 снижает риск ошибок измерения их положений, задавая максимальную точность в определении взаимного пространственного положения гентри 3 и механического манипулятора 5.
Другое преимущество заключается в том, что механический манипулятор 5, выполненный с возможностью скользящего перемещения вдоль направляющей 43 внутри свободной камеры 4а, может беспрепятственно достигать всех частей тела пациента, при этом оператору не нужно перемещаться или отвлекаться, тем самым замедляя процесс операции или вмешиваясь в структуру кабелей и трубок, подключенных к пациенту.
Другое важное преимущество, обеспечиваемое углублениями 33е и 33f и конкретным расположением механического манипулятора 5 и средств отображения, заключается в том, что устройство 1 рентгеновской визуализации дает оператору значительную свободу перемещения по сравнению с устройствами, известными из уровня техники.
Более того, благодаря углублениям 33е и 33f оператор получает оптимальный доступ к области проведения операции и, что более важно, к устройству 1 для проведения сканирования для отслеживания в режиме реального времени положения механического манипулятора 5 относительно пациента и хода выполнения операции.
Другое, не менее важное преимущество заключается в расположении механического манипулятора 5 в углублении 33е или 33f, за счет чего оптимизируется использование пространства и, тем самым, уменьшают общие размеры гентри с механическим манипулятором, что упрощает транспортировку устройства 1.
В частности, за счет такого оптимального использования пространства гентри 3 с одним или двумя механическими манипуляторами 5 имеет по существу такие же размеры, что и гентри из уровня техники без механических манипуляторов.
Последнее преимущество заключается в использовании механических соединений 53 и 53а, применяемых в приводах с регулируемой податливостью, за счет чего удается защитить врача или другого человека от получения травм или повреждения манипулятора в результате столкновения с механическим манипулятором 5.
К тому же, такие приводы способны поглощать возможные удары. Более того, за счет способности измерять смещение, вызванное возможным ударом, они позволяют восстанавливать требуемое положение, утерянное после удара.
Другое существенное преимущество заключается в способе применения, который, благодаря определению одного или нескольких пространственных положений, легко получаемых оператором, позволяет легко и быстро позиционировать механический манипулятор 5.
К тому же, в соответствии с этим способом устройство 1 может обеспечивать одно или несколько пространственных положений механического манипулятора 5, которые после сохранения могут быть достигнуты без продолжительного управления со стороны оператора.
Кроме того, предлагаемая новая стадия удержания предназначена для компенсации механическим манипулятором перемещений пациента, например, во время дыхания, за счет чего медицинский инструмент будет всегда находиться в оптимальном положении.
В настоящее изобретение могут быть внесены изменения, не выходящие за пределы объема изобретательской концепции, описанной в независимом пункте формулы изобретения и в технических эквивалентах. В указанной области все детали могут быть заменены эквивалентными элементами, а материалы, формы и размеры могут быть выбраны в зависимости от необходимости.
Например, вместо ротора 33 и статор 34 телескопическим может быть выполнен гентри 3, т.е. он может иметь телескопический кожух, а внутри него будет размещаться источник 31 и приемник 32, и он будет проходить по существу вдоль пути гентри 3, а внутри объема корпуса будет находиться по меньшей мере один внутренний приводной механизм, выполненный с возможностью задавать вращение источника 31 и/или приемника 32 вокруг продольной оси 1а и по круговой траектории.
Телескопический кожух содержит дугообразный нижний модуль и дугообразный модуль, выполненный с возможностью перемещения относительно дугообразного нижнего модуля для изменения угловой протяженности гентри по круговой траектории указанного гентри 3.
В этом случае механический манипулятор 5, соединенный с гентри 3, может быть соединен с нижним дугообразным модулем. Альтернативно механический манипулятор 5 соединен с мобильным дугообразным модулем.
Предпочтительно устройство 1 также может содержать средства вращения по меньшей мере гентри 3 вокруг оси вращения, проходящей по существу поперечно продольной оси 1а и, соответственно, верхней поверхности 2а.
В случае с одной кареткой средства вращения находятся между кареткой 44 (или первой кареткой 44а) и гентри в сборе 3 с механическим манипулятором 5, так что они приводят во вращение одновременно и гентри 3, и механический манипулятор 5.
Такой телескопический гентри 3 и, следовательно, корпус телескопического типа, внутренний приводной механизм, средства вращения по меньшей мере гентри 3, элемент возможной компенсации и необязательно один или несколько закрывающих блоков описаны на со стр. 7, строка 10, до стр. 26, строка 22 и показаны на фиг. 1а-5 в патенте MI2014A001296. Эти страницы и указанные рисунки в патенте MI2014A001296 включены в настоящий документ посредством ссылки.
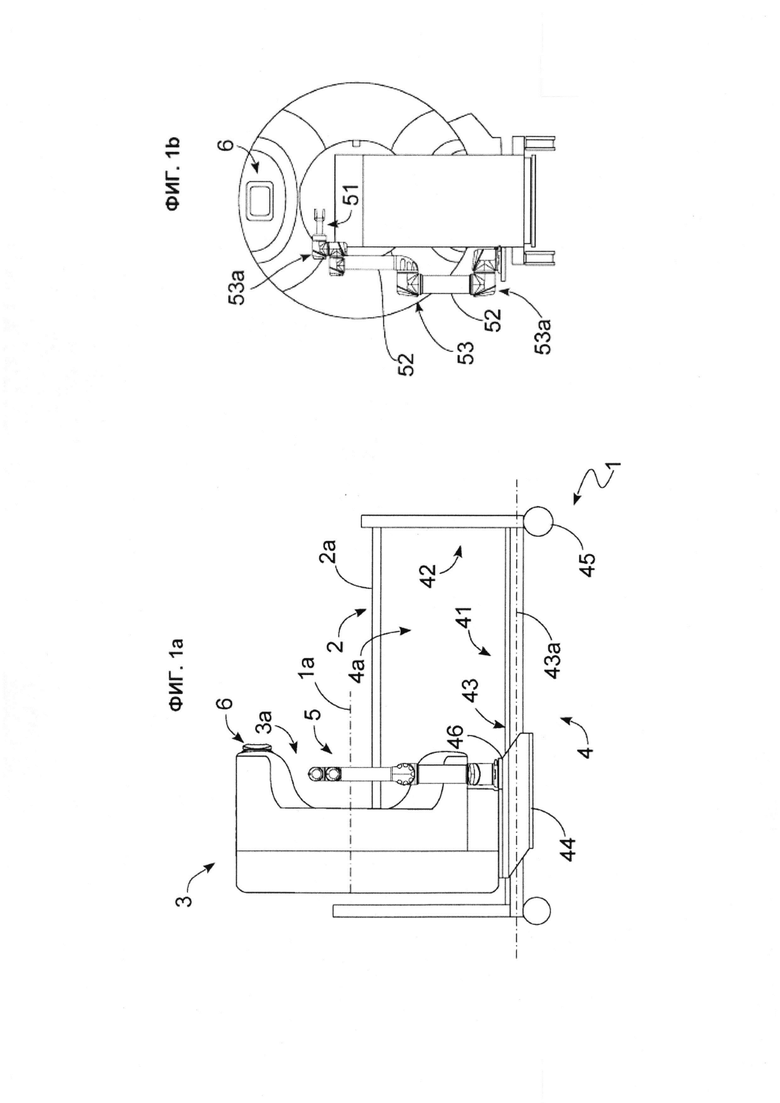
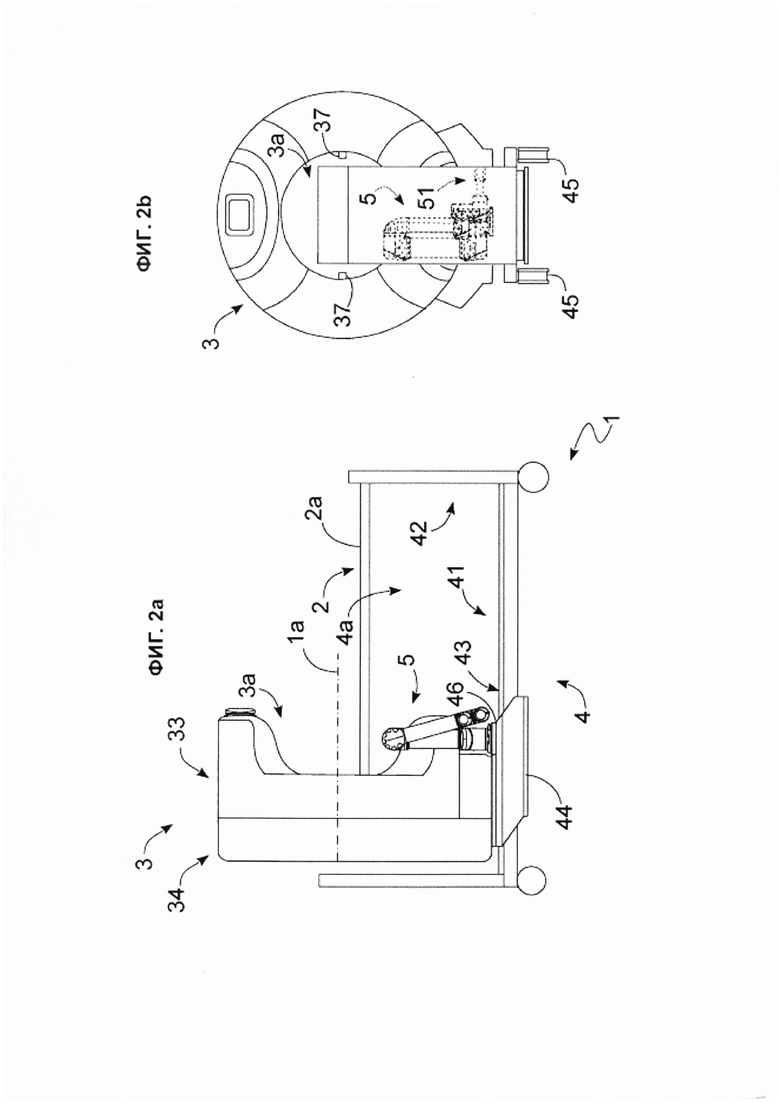
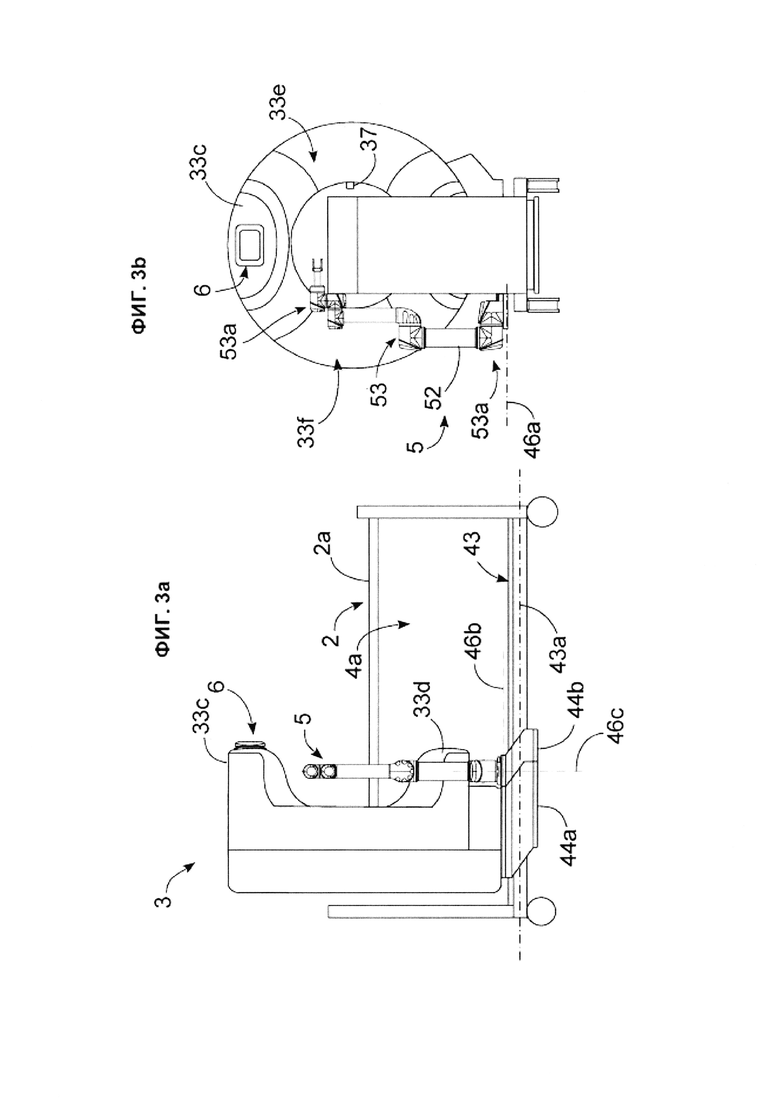
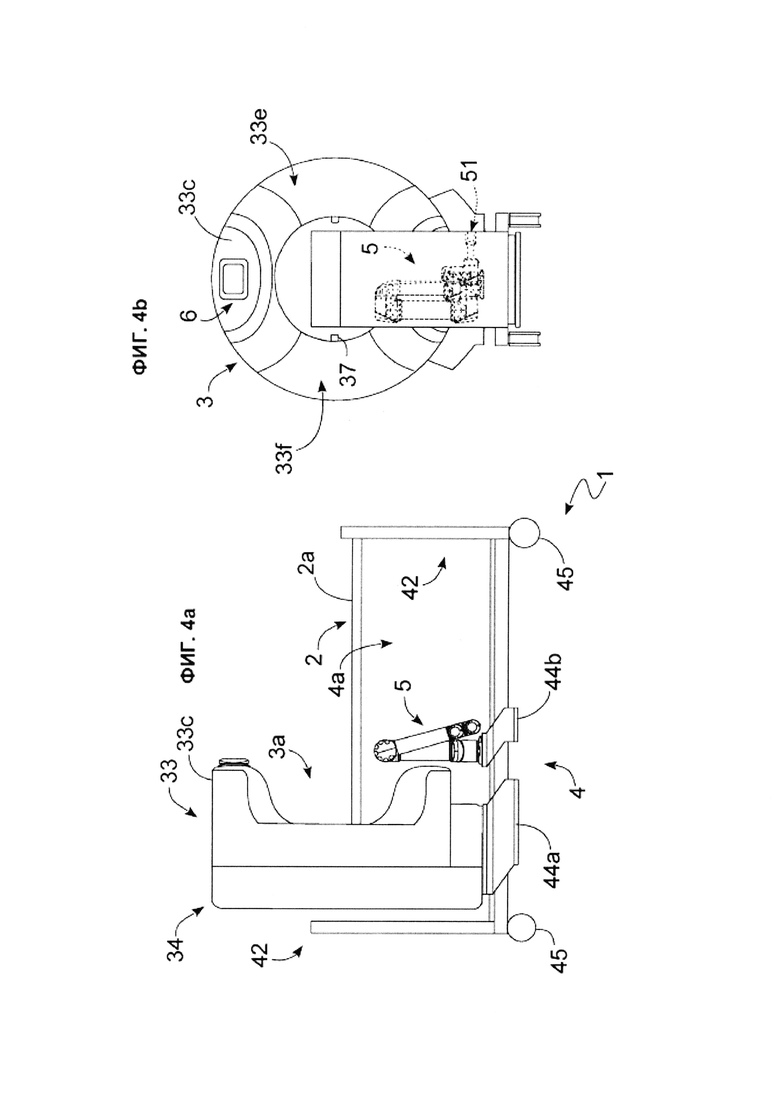
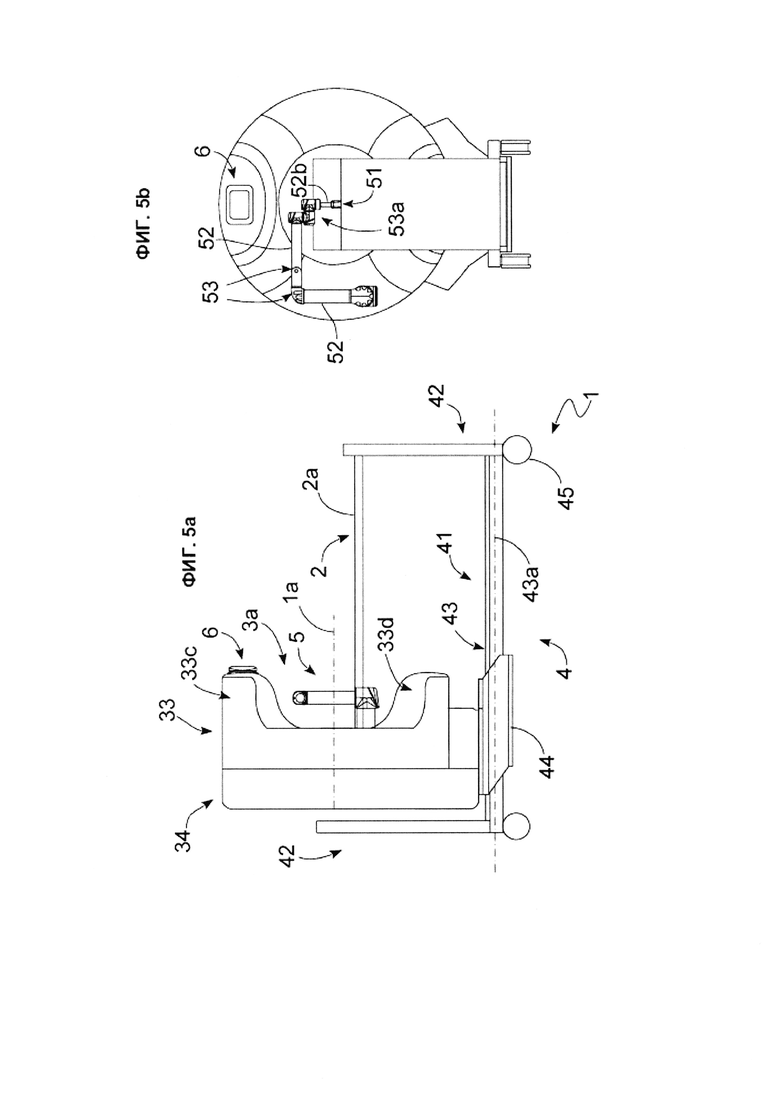
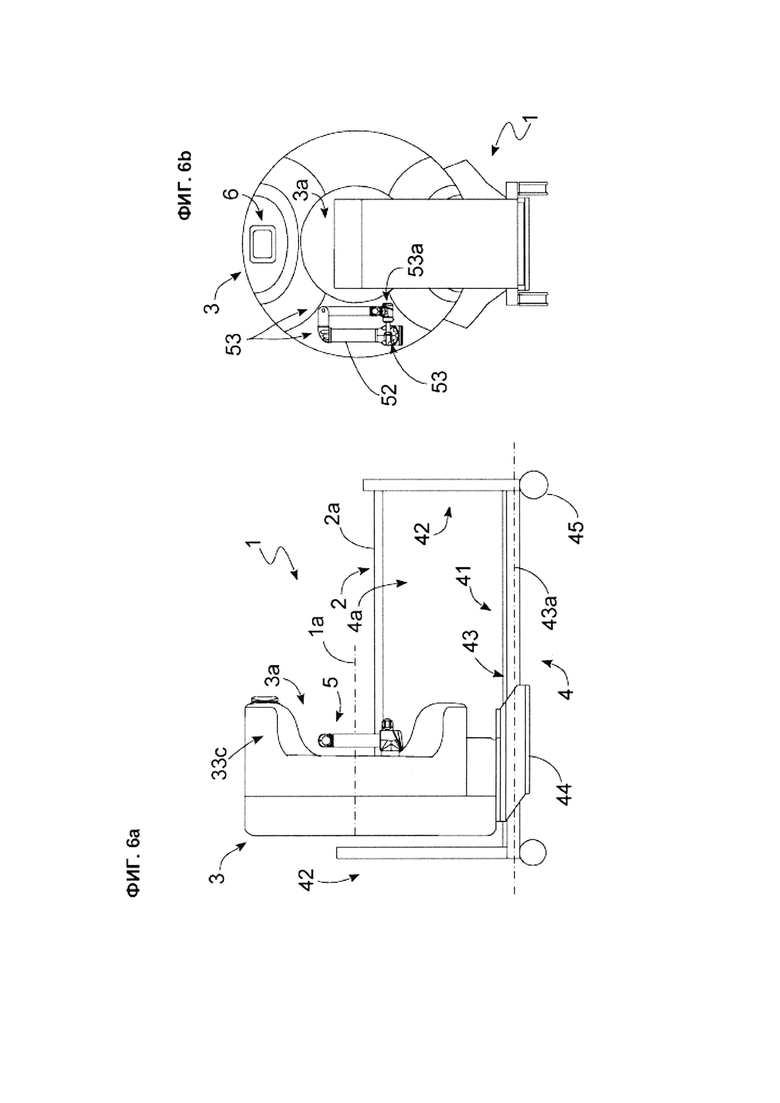
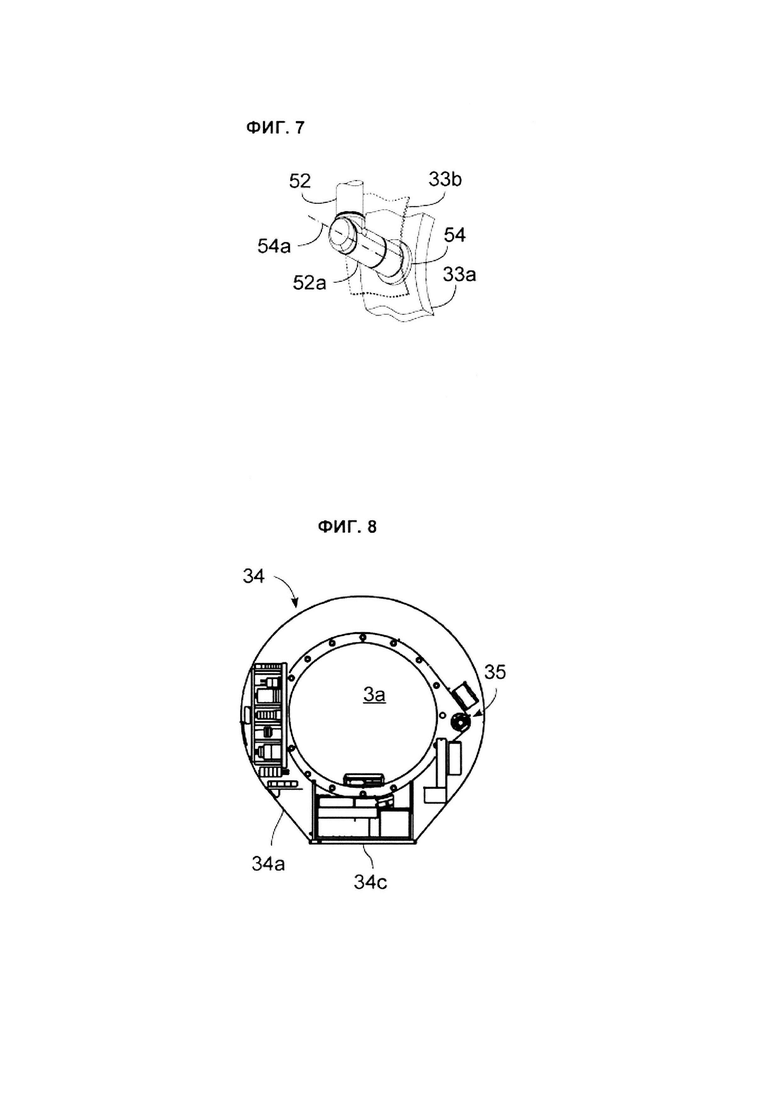
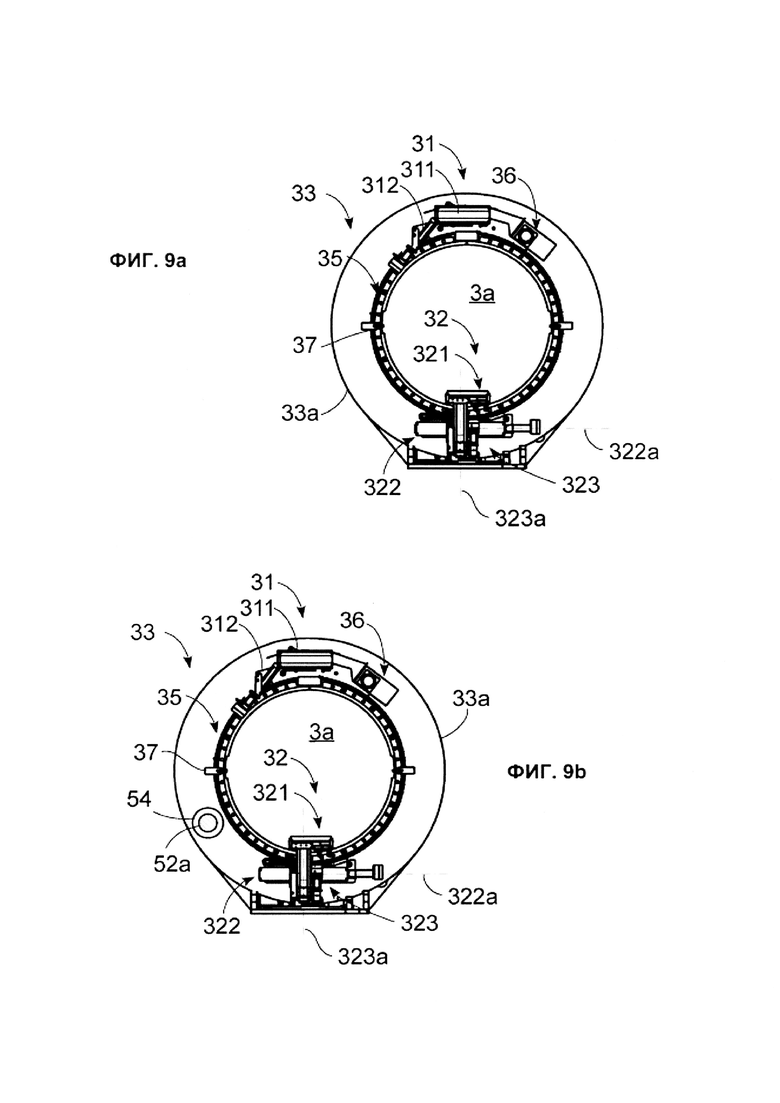
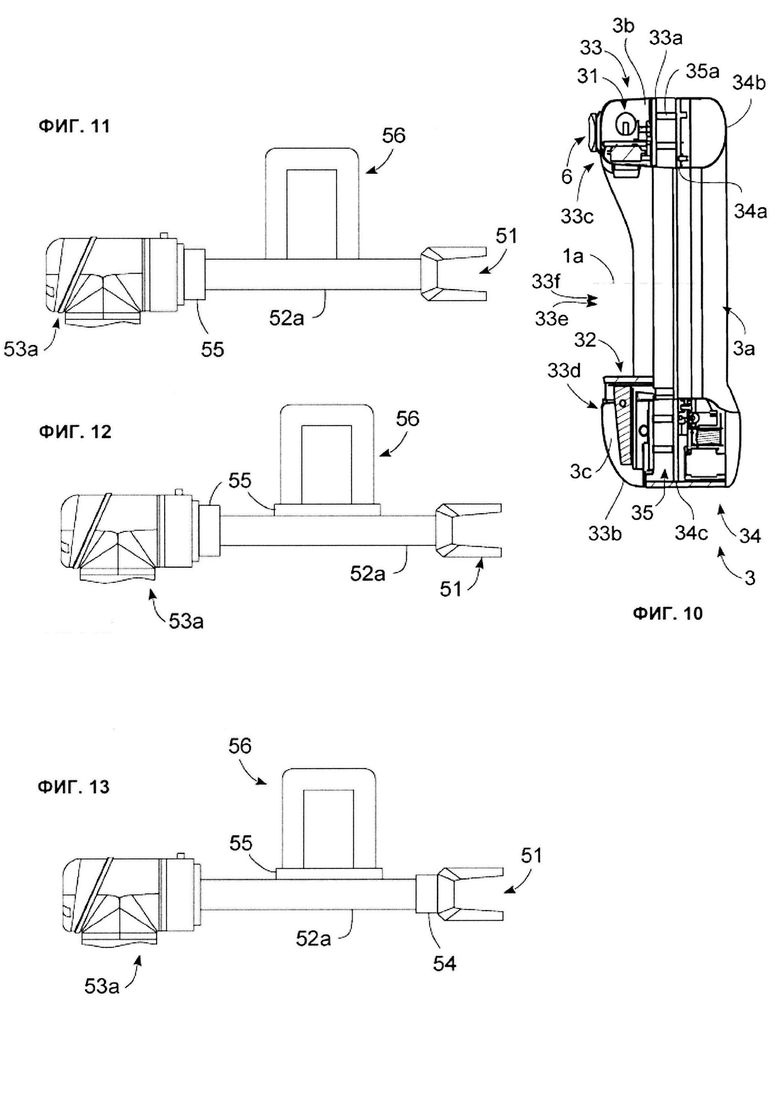
Изобретение относится к медицине. Устройство рентгеновской визуализации, имеющее продольную ось и содержащее гентри, выполненный с возможностью выполнения рентгеновской визуализации и образующий область для проведения исследования; несущую конструкцию, на которой установлен гентри; механический манипулятор, выполненный с возможностью перемещения медицинского инструмента относительно области для проведения исследования; причем несущая конструкция содержит направляющую, образующую ось линейного перемещения, параллельную продольной оси; и каретку, перемещающую гентри и механический манипулятор вдоль оси линейного перемещения. Применение данного изобретения позволит улучшить пространственную взаимосвязь между механическим манипулятором и устройством визуализации. 12 з.п. ф-лы, 13 ил., 3 пр.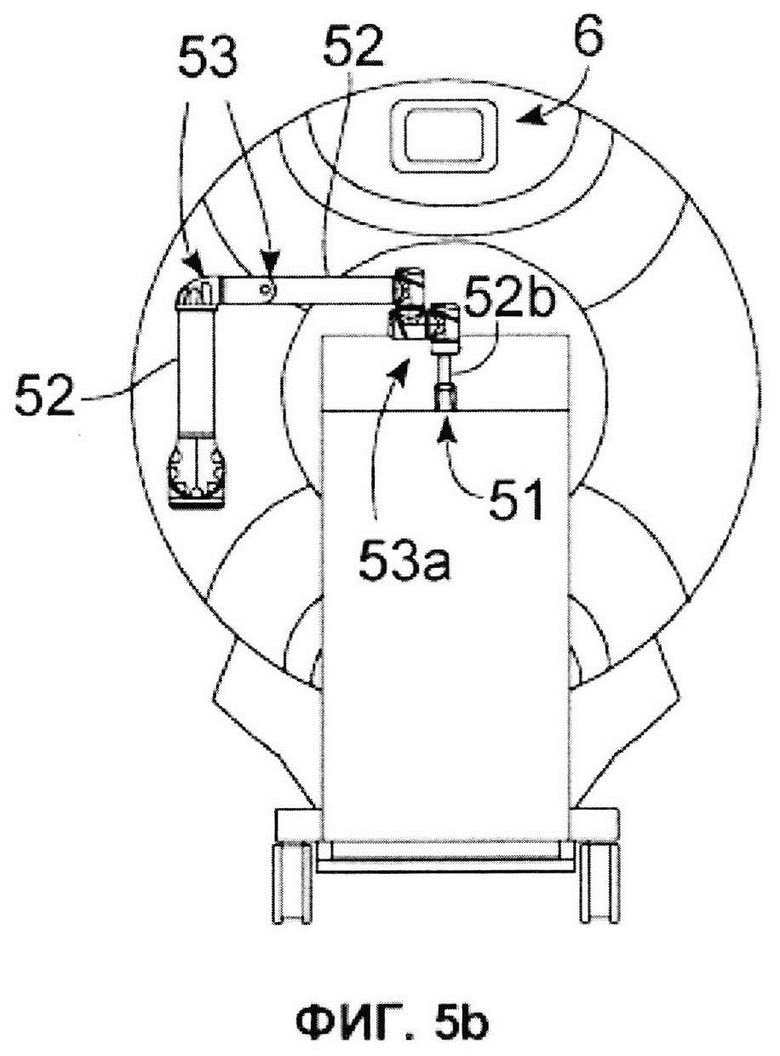
1. Устройство (1) рентгеновской визуализации, имеющее продольную ось (1a) и содержащее: гентри (3), выполненный с возможностью выполнения рентгеновской визуализации и образующий область (3a) для проведения исследования, и несущую конструкцию (4), на которой установлен гентри (3), механический манипулятор (5), выполненный с возможностью перемещения медицинского инструмента относительно области (3a) для проведения исследования, причем несущая конструкция (4) содержит: направляющую (43), образующую ось (43a) линейного перемещения, по существу параллельную продольной оси (1a), и по меньшей мере одну каретку (44, 44a, 44b), выполненную с возможностью перемещения гентри (3) и механического манипулятора (5) вдоль оси (43a) линейного перемещения, отличающееся тем, что гентри (3) соединен с по меньшей мере одной кареткой (44, 44a, 44b) и содержит источник (31), выполненный с возможностью испускания излучения, приемник (32), выполненный с возможностью приема указанного излучения после прохождения указанного излучения через область (3a) для проведения исследования, ротор (33), на котором установлен по меньшей мере источник (31) и приемник (32), статор (34), на котором консольно установлен ротор (33), и элемент (35) вращения ротора (33) относительно статора (34), причем по меньшей мере один механический манипулятор (5) соединен с ротором (33), и механический манипулятор (5) содержит по меньшей мере жесткий элемент (52, 52a, 52b) и по меньшей мере одно механическое соединение (53), выполненное с возможностью перемещения по меньшей мере одного жесткого элемента (52, 52a, 52b) и двух датчиков (55) силы, при этом датчиков силы не может быть меньше одного, два датчика (55) силы разделены посредством только одного из жестких элементов (52, 52a, 52b), при этом жестких элементов не может быть меньше одного, вследствие чего усилия/крутящие моменты взаимодействия между медицинским инструментом и пациентом и усилия/крутящие моменты взаимодействия с оператором определяются двумя датчиками (55) силы независимо друг от друга.
2. Устройство (1) рентгеновской визуализации по п. 1, в котором по меньшей мере один механический манипулятор (5) может занимать сложенное положение, в котором по меньшей мере один механический манипулятор (5) сложен и практически полностью заключен в пределах проекций гентри (3) вдоль продольной оси (1a), чтобы не перекрывать область (3a) для проведения исследования, и по меньшей мере одно разложенное положение, в котором по меньшей мере один механический манипулятор (5) по меньшей мере частично развернут так, что он выступает из проекций гентри (3) и размещает медицинский инструмент в области (3a) для проведения исследования.
3. Устройство (1) рентгеновской визуализации по п. 1, в котором ротор (33) содержит пластину (33a) ротора, выполненную с возможностью консольной установки на нее источника (31) и приемника (32), и кожух (33b) ротора, содержащий по меньшей мере один выступ (33c, 33d), образующий совместно с пластиной (33a) ротора отделение (3b, 3c) для размещения источника (31) и приемника (32), и по меньшей мере одно углубление (33e, 33f), имеющее меньшее осевое протяжение, чем по меньшей мере один выступ (33c, 33d), причем по меньшей мере один механический манипулятор (5) соединен с кожухом (33b) ротора в по меньшей мере одном углублении (33e, 33f).
4. Устройство (1) рентгеновской визуализации по п. 3, в котором кожух (33b) ротора содержит первый выступ (33c), образующий первое отделение (3b) для размещения источника (31), второй выступ (33d), образующий второе отделение (3c) для размещения приемника (32), первое углубление (33e) и второе углубление (33f), отделенные друг от друга выступами (33c, 33d), причем указанное устройство (1) рентгеновской визуализации содержит два механических манипулятора (5), при этом механических манипуляторов не может быть меньше одного, каждый из механических манипуляторов (5) соединен с кожухом (33b) ротора в одном из углублений (33e, 33f).
5. Устройство (1) рентгеновской визуализации по п. 1, в котором каретка (44, 44a, 44b) соединена с гентри (3) и механическим манипулятором (5).
6. Устройство (1) рентгеновской визуализации по п. 5, содержащее стол (2), имеющий верхнюю поверхность (2a) для размещения пациента, причем несущая конструкция (4) выполнена с возможностью поддержки стола (2) в поднятом положении с образованием свободной камеры (4a) между несущей конструкцией (4) и столом (2), и механический манипулятор (5) может занимать сложенное положение, в котором механический манипулятор (5) имеет высоту, которая по существу меньше высоты свободной камеры (4a), и по меньшей мере одно разложенное положение, в котором механический манипулятор (5) по меньшей мере частично развернут так, что он размещает медицинский инструмент в области (3a) для проведения исследования.
7. Устройство (1) рентгеновской визуализации по п. 5 или 6, в котором несущая конструкция (4) содержит одну каретку (44), соединенную с гентри (3) и механическим манипулятором (5) для одновременного перемещения гентри (3) и механического манипулятора (5) вдоль оси (43a) линейного перемещения.
8. Устройство (1) рентгеновской визуализации по п. 5 или 6, в котором несущая конструкция (4) содержит первую каретку (44a), соединенную с гентри (3), и вторую каретку (44b), соединенную с механическим манипулятором (5), для перемещения независимо друг от друга гентри (3) и механического манипулятора (5) вдоль оси (43a) линейного перемещения.
9. Устройство (1) рентгеновской визуализации по п. 1, содержащее по меньшей мере один датчик (55) силы, выполненный с возможностью измерения крутящих моментов/усилий, действующих на механический манипулятор (5).
10. Устройство (1) рентгеновской визуализации по п. 9, содержащее блок управления, выполненный с возможностью избирательного поддержания по существу постоянного значения крутящего момента/усилия, действующего на механический манипулятор (5) и определенного датчиком (55) силы, или передачи команды перемещения механического манипулятора (5) по существу пропорционально крутящему моменту/усилию, определенному датчиком (55) силы.
11. Устройство (1) рентгеновской визуализации по п. 3 или 4, содержащее средства отображения по меньшей мере одного механического манипулятора (5), соединенного с ротором (33), расположенным на по меньшей мере одном выступе (33c, 33d).
12. Устройство (1) рентгеновской визуализации по п. 11, в котором средства отображения расположены на верхней части по меньшей мере одного выступа (33c, 33d).
13. Устройство (1) рентгеновской визуализации по любому из пп. 5-7, содержащее два из средств отображения, каждое из которых расположено на верхней части выступов (33c, 33e).
| US 20100274120 A1, 28.10.2010 | |||
| US 2004034438 A1, 19.02.2004 | |||
| US 2009248038 A1, 01.10.2009 | |||
| US 2015117604 A1, 30.04.2015 | |||
| WO 2016168617 A1, 20.10.2016. |

