Изобретение относится к радионавигации и может быть использовано в локальных навигационных системах и сетях для управления движением мобильных объектов в локальных зонах навигации.
Известен защищенный патентом РФ №2204145, кл. G01S 3/46, 2003 способ определения координат источника излучения, основанный на приеме его сигнала тремя антеннами, образующими ортогональные базы.
Такое действие, как определение направления на источник излучения, является существенным признаком и заявляемого способа.
Известен также защищенный патентом РФ №2013785, кл. G01S 13/00, 1994 способ определения местоположения подвижных объектов, заключающийся в излучении кодированных сигналов передатчиками объектов, приеме сигналов в N пространственно разнесенных пунктах с последующей ретрансляцией их на центральный приемный пункт и измерении задержек между принятыми сигналами.
Ретрансляция сигналов на центральный приемный пункт является существенным признаком и заявляемого способа.
Причиной, препятствующей достижению в этих аналогах, защищенных патентами РФ, технического результата, обеспечиваемого изобретением, является необходимость использования достаточно сложной системы единого времени.
Известен разностно-дальномерный способ определения местоположения мобильных объектов, заключающийся в поочередном излучении сетью опорных навигационных пунктов, расположенных в точках пространства с известными координатами, когерентных гармонических сигналов, их приеме на мобильном объекте, принятых от каждого опорного объекта и вычислении по ним координат мобильного объекта [Бакулев П.А., Сосновский А.А. Радиолокационные и радионавигационные системы. - М.: Радио и связь, 1994, с. 211-214].
Измерение фазовых сдвигов сигналов и вычисление по ним координат мобильного объекта является существенным признаком и заявляемого способа.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является необходимость в использовании высокоточной шкалы единого времени на объекте навигации и сложность реализации при больших расстояниях между опорными радионавигационными точками и объектом навигации.
Наиболее близким по технической сущности к заявляемому (прототипом) является способ определения местоположения объекта навигации, описанный в заявке на патент №2014116786 от 24.04.2014, решение о выдаче патента от 05.06.2015.
Способ заключается в формировании и одновременном излучении объектом навигации двух высокочастотных гармонических сигналов с разными частотами, приеме их в нескольких опорных радионавигационных точках с известными координатами, формировании там сигналов разностной частоты из принятых высокочастотных сигналов, передаче сформированных сигналов разностной частоты на центральный пункт обработки, где измеряется разность фаз указанных сигналов разностной частоты, полученных из разных опорных радионавигационных точек, а результаты фазовых измерений пересчитываются с учетом взаимного расположения центрального приемного пункта и опорных радионавигационных точек в координаты объекта навигации.
Такие действия, как формирование и одновременное излучение объектом навигации и передатчиком двух высокочастотных гармонических сигналов с разными частотами, прием указанных высокочастотных сигналов в нескольких опорных радионавигационных точках с известными координатами, формирование в них из высокочастотных сигналов, принятых от объекта навигации, сигналов разностной частоты, измерение разностей фаз сигналов разностной частоты, сформированных в разных опорных радионавигационных точках и вычисление по измеренным разностям фаз координат объекта навигации с учетом взаимного расположения центрального пункта обработки и опорных радионавигационных точек, являются существенными признаками и заявляемого способа.
Причиной, препятствующей достижению в способе-прототипе технического результата, обеспечиваемого изобретением, является низкий уровень помехозащищенности реализующих данный способ радионавигационных систем по отношению к умышленным помехам со стороны возможного злоумышленника, обусловленная высокой спектральной плотностью излучаемых объектом навигации сигналов вблизи несущей частоты. Это обстоятельство облегчает потенциальному злоумышленнику как возможность обнаружения сигналов, используемых в реализующей рассматриваемый способ системе, и измерения частот указанных сигналов, так и возможность подавления этих сигналов прицельными по частоте активными помехами.
Технической задачей, на решение которой направлено изобретение, является повышение помехозащищенности радионавигационных систем, реализующих предлагаемый способ.
Для достижения указанного технического результата в известном способе определения местоположения объекта навигации, заключающемся в формировании объектом навигации двух высокочастотных гармонических сигналов с разными частотами, их одновременном излучении с объекта навигации и приеме в нескольких опорных радионавигационных точках с известными координатами, формировании в этих точках сигналов разностной частоты из принятых от объекта навигации высокочастотных сигналов, передаче сформированных сигналов разностной частоты в центральный пункт обработки, где измеряется разность фаз сигналов разностной частоты, поступивших из разных опорных точек, а результаты измерений разностей фаз с учетом взаимного расположения центрального приемного пункта и опорных радионавигационных точек пересчитываются в координаты объекта навигации, оба сформированных на объекте навигации гармонических сигнала перед излучением синхронно модулируют по фазе одной и той же псевдослучайной двоичной последовательностью с девиацией фазы 180°.
Сущность изобретения поясняется чертежом, на котором приведены:
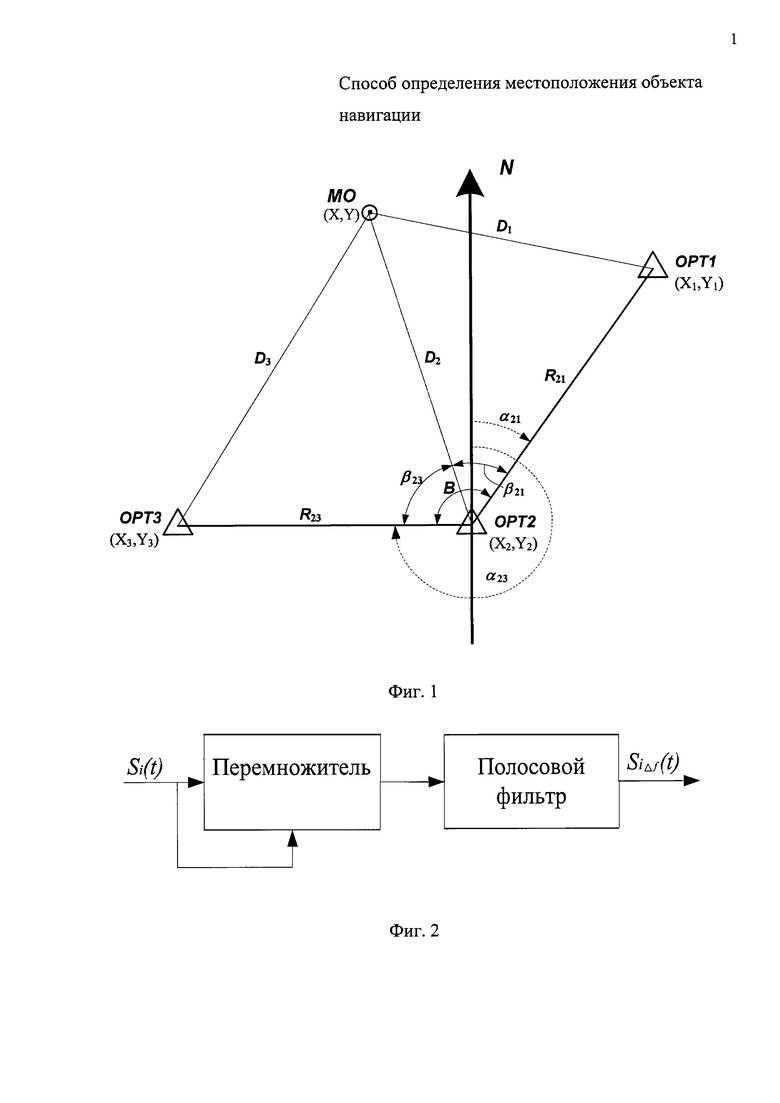
- на фиг. 1 - взаимное положение объекта навигации и трех опорных радионавигационных точек;
- на фиг. 2 - структура формирователя сигнала разностной частоты.
Для реализации способа необходимо как минимум три опорные радионавигационные точки с известными координатами.
Функционирование способа поясняется фиг. 1, на которой показаны мобильный объект навигации (МО), находящийся в точке с неизвестными координатами X и Y, и опорные радионавигационные точки ОРТ1, ОРТ2 и ОРТ3, расположенные в точках с известными координатами X1 и Y1, Х2 и Y2 и Х3 и Y3 соответственно. Там же показаны расстояния D1, D2, D3 между объектом навигации и опорными радионавигационными точками, а также направление N на север.
С помощью передатчика, установленного на объекте навигации, в направлении точек ОРТ1, ОРТ2 и ОРТ3 формируют два гармонических сигнала с частотами ω0 и ω1, синхронно модулируют их по фазе с девиацией фазы 180° одной и той же двоичной случайной последовательностью r(t), суммируют полученные фазоманипулированные колебания и излучают полученный высокочастотный широкополосный сигнал (сумму двух широкополосных фазоманипулированных сигналов ФМ-2 с частотами ω0 и ω1) с объекта навигации

где r(t) - двоичная импульсная последовательность, принимающая значения "+1" и "-1" в случайные моменты времени. Оба сигнала имеют одинаковую амплитуду А и случайные начальные фазы φ0 и φ1.
Этот сигнал принимается в точках ОРТ1, ОРТ2 и ОРТ3 на расстояниях D1, D2 и D3 соответственно от объекта навигации:
где с=3·108 м/с - скорость распространения радиоволн в атмосфере.
В каждой из опорных радионавигационных точек ОРТ1, ОРТ2 и ОРТ3 из принятых сигналов s1(t), s2(t) s3(t) формируют сигналы разностной частоты.
Структура формирователя сигналов разностной частоты приведена на фиг. 2. Он представляет собой последовательно включенные перемножитель (балансный смеситель) и узкополосный полосовой фильтр, настроенный на разностную частоту  .
.
В каждой из опорных радионавигационных точек принимается сигнал si(t)  . Принятый сигнал подается одновременно на оба входа перемножителя (балансного смесителя), в котором происходит демодуляция фазоманипулированного сигнала:
. Принятый сигнал подается одновременно на оба входа перемножителя (балансного смесителя), в котором происходит демодуляция фазоманипулированного сигнала:
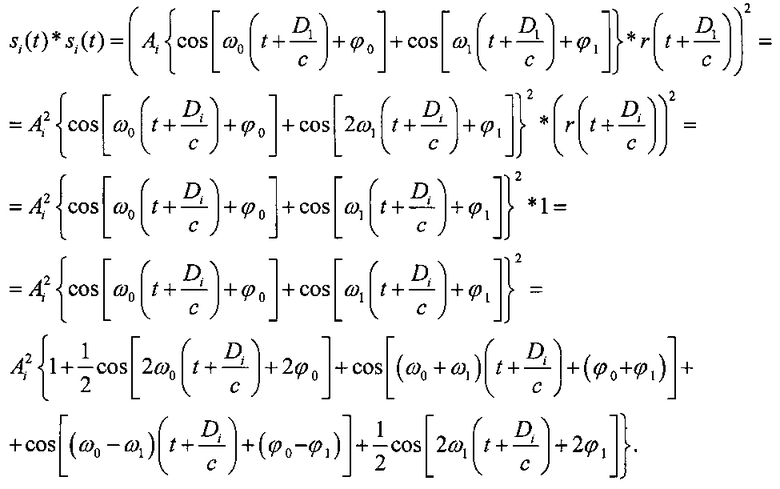
Таким образом, на выходе перемножителя формируется сигнал, содержащий следующие спектральные составляющие:
1) сигнал с нулевой частотой (постоянная составляющая);
2) гармонические сигналы с удвоенными частотами 2ω0 и 2ω1;
3) гармонический сигнал с суммарной частотой ωΣ=ω0+ω1;
4) гармонический сигнал с разностной частотой 
Все эти сигналы, за исключением сигнала с разностной частотой ωр, подавляются фильтром.
Сигналы разностной частоты, формируемые в каждой из опорных радионавигационных точек, имеют вид:
Нетрудно видеть, что сигналы, формируемые в каждой из опорных радионавигационных точек, различаются по фазам, которые определяются расстояниями D1, D2 и D3 соответственно. Эти сигналы передаются в центральный приемный пункт (ЦПП). В качестве такового может быть использована, например, одна из опорных радионавигационных точек. Примем для определенности, что территориально ЦПП находится в точке ОРТ2.
Таким образом, в ЦПП из опорных радионавигационных точек поступают три следующих сигнала разностной частоты.
1) Сигнал, поступивший из ОРТ1,

где R21 - расстояние между опорной радионавигационной точкой ОРТ1 и ЦПП;
v - скорость распространения радиосигнала в линии связи, соединяющей ОРТ1 и ЦПП.
S21p (t) отличается от сигнала S1P (t) амплитудой и дополнительным фазовым сдвигом  , который обусловлен прохождением расстояния R21, разделяющего ОРТ1 и ЦПП (в рассматриваемом случае точку ОРТ2).
, который обусловлен прохождением расстояния R21, разделяющего ОРТ1 и ЦПП (в рассматриваемом случае точку ОРТ2).
Этот сигнал можно представить в следующем виде:

где  .
.
2) Сигнал, принятый непосредственно в точке ОРТ2 (ЦПП),

В данном случае дополнительный фазовый сдвиг отсутствует, поскольку расстояние между точкой ОРТ2 и ЦПП равно нулю.
Этот сигнал также можно представить в виде
s22p(t)=A22cos(ωpt+ψ22),
где  .
.
3) Сигнал, поступивший из ОРТ3,

Этот сигнал также можно записать в виде:

где  .
.
Найдем разность фаз Δψ21=ψ22-ψ21 сигналов S22p(t) и S21p(t) и разность фаз Δψ23=ψ22-ψ23 сигналов S22p(t) и S23p(t):
Из этих выражений следует, что рассматриваемые разности не зависят от случайных начальных фаз φ0 и φ1.
Исключив из последних выражений для Δψ21 и Δψ23 известные фазовые сдвиги  и
и  , получим окончательные выражения для расчета координат объекта навигации разности Δφ21 фаз сигналов разностной частоты, сформированных во второй и первой опорных точках, а также для расчета разности Δφ23 сигналов разностной частоты, сформированных во второй и третьей опорных точках:
, получим окончательные выражения для расчета координат объекта навигации разности Δφ21 фаз сигналов разностной частоты, сформированных во второй и первой опорных точках, а также для расчета разности Δφ23 сигналов разностной частоты, сформированных во второй и третьей опорных точках:
Таким образом, параметр Δφ21 представляет собой разность фаз сигналов разностной частоты между второй и первой опорными точками, а параметр Δφ23 - между второй и третьей опорными точками. Указанные разности фаз однозначно соответствуют разностям дальностей D2-D1 и D2-D3 соответственно.
Это позволяет сделать вывод, что по результатам измерений параметров Δφ21 и Δφ23 могут быть рассчитаны параметры D1, D2 и D3 - расстояния между объектом навигации и опорными радионавигационными точками, а следовательно, и координаты объекта навигации.
Ниже приведен алгоритм пересчета результатов измерения разности фаз сигналов разностной частоты в координаты объекта навигации. Этот алгоритм применим для локальных навигационных систем, когда допустимо пренебречь сферичностью Земли, а скорость распространения радиоволн в зоне действия навигационной системы можно считать постоянной.
Исходными данными для расчета являются:
- разность Δφ21 фаз сигналов разностной частоты для первой и второй радионавигационных точек;
- разность Δφ23 фаз сигналов разностной частоты для третьей и второй радионавигационных точек.
Кроме того, в расчете используются следующие константы:
- значение первой высокой частоты ω0;
- значение второй высокой частоты ω1;
- скорость распространения радиоволн в атмосфере с;
- расстояние между первой и второй опорными радионавигационными точками R21;
- расстояние между третьей и второй опорными радионавигационными точками R23.
Порядок расчета следующий.
1. Вычисляются разности расстояний от объекта навигации до опорных точек
Здесь D1, D2, D3 - расстояния от объекта навигации (МО) до первой ОРТ1, второй ОРТ2 и третьей ОРТ3 опорных радионавигационных точек в соответствии с фиг. 1.
2. Величины ΔD21 и ΔD23 нормируются по длинам базовых линий и вычисляется параметр γ:
3. Определяются постоянные параметры:
а=α21-α23; b=γ·Δd23-Δd21,
где α21 - угол между направлением на север и базовой линией R21;
α23 - угол между направлением на север и базовой линией R23.
4. Составляется уравнение для расчета угла β23 между базовой линией R23 и направлением на объект навигации:
cos(a-β23)-γ·cosβ23=b
Это уравнение решается относительно угла β23 каким-либо из численных итерационных методов, например методом деления отрезка пополам.
5. Вычисляются координаты объекта навигации в местной прямоугольной системе координат, начало которой находится в точке ОРТ2:
При необходимости координаты объекта навигации пересчитываются в исходную прямоугольную систему координат;
Таким образом, в предлагаемом способе сохраняются все возможности измерения координат объекта навигации, что и в способе-прототипе. Кроме того, вследствие фазовой модуляции излучаемых сигналов случайной двоичной последовательностью коротких импульсов с девиацией фазы 180° существенно расширяется спектр излучаемых объектом навигации сигналов. Вследствие этого во столько же раз уменьшается их спектральная плотность. Помимо этого в спектре излучаемых сигналов отсутствуют спектральные составляющие с частотами ω0 и ω1. Ширина спектра излучаемых сигналов может быть увеличена в десятки раз. Соответственно во столько же уменьшается спектральная плотность этих сигналов.
Степень расширения спектра и соответственно степень уменьшения спектральной плотности определяется средней длительностью импульсов случайной двоичной последовательности, используемой для фазовой модуляции излучаемых сигналов.
Низкая спектральная плотность излучаемых сигналов, отсутствие в их спектре составляющих с несущими частотами в совокупности с малым временем излучения сигнала затрудняют их обнаружение и измерение величин частот ω0 и ω1 потенциальным злоумышленником. Вследствие этого существенно затрудняется возможность подавления работы радионавигационных систем, использующих предлагаемый способ. Это значительно повышает помехоустойчивость аппаратуры, реализующей способ, по сравнению с прототипом.
Техническая реализация способа не вызывает затруднений. В качестве примера реализации рассмотрим реализацию предлагаемого способа для построения локальной навигационной системы для управления движением транспорта в местах повышенной опасности, где требуется высокоточное определение местоположения высокоскоростных движущихся объектов: на критических участках трасс их движения (например, при приближении к местам переключения стрелок на железнодорожных путях, вблизи крутых закрытых поворотов автомобильных трасс). Для реализации системы может быть выбран диапазон частот 1200-1400 МГц. Зона действия локальной навигационной системы может составлять несколько сотен метров.
Формирование двух высокочастотных фазомодулированных сигналов на объекте навигации можно реализовать на основе двух синтезаторов частоты, синхронизируемых общим опорным генератором, и сумматора, балансных модуляторов и генератора псевдослучайных двоичных последовательностей, например генератора М-последовательностей на основе регистра сдвига с обратными связями. В качестве синтезаторов частоты можно применить, например, микросхемы типа ADF4360-5, позволяющие сформировать два высокостабильных гармонических сигнала с разносом частот от (0,1-100) МГц, в качестве опорного генератора - термостабилизированный кварцевый генератор типа NT3225SA.
Для приема сигналов в опорных навигационных точках можно использовать интегральные СВЧ-усилители - микросхемы типа SPF5122Z, для нормировки принятых сигналов по амплитуде - логарифмический усилитель AD8309, в качестве узла формирования сигнала разностной частоты - смеситель на транзисторе BFP620, нагрузкой которого является фильтр нижних частот с частотой среза, равной разностной частоте. Передачу сигналов разностной частоты из опорных навигационных точек в центральный приемный пункт можно реализовать либо по проводным каналам (при небольших расстояниях между опорными навигационными точками и центральным приемным пунктом - порядка 100 м), либо по радиоканалам с разделением их по частоте (при более значительных расстояниях между опорными навигационными точками и центральным приемным пунктом).
Выделение разности фаз сигналов разностной частоты в центральном приемном пункте реализуется на основе фазового детектора (например, на микросхеме SYPD-1 или подобной).
Аналоговые сигналы с выхода фазового детектора подаются через аналого-цифровые преобразователи на входные порты микопроцессора типа STM, в котором реализуется решение навигационной задачи по приведенному выше алгоритму.
Способ может найти применение для построения локальных навигационных систем при управлении движением транспорта в местах повышенной опасности, где требуется высокоточное определение местоположения высокоскоростных движущихся объектов, на критических участках трасс их движения (например, при приближении к местам переключения стрелок на железнодорожных путях, вблизи крутых закрытых поворотов автомобильных трасс).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА НАВИГАЦИИ | 2014 |
|
RU2567114C1 |
| ШИРОКОПОЛОСНАЯ ФАЗОРАЗНОСТНАЯ ЛОКАЛЬНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2602432C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2014 |
|
RU2559813C1 |
| ФАЗОРАЗНОСТНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА С ШИРОКОПОЛОСНЫМ СИГНАЛОМ | 2015 |
|
RU2602506C1 |
| ФАЗОВЫЙ РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2014 |
|
RU2575483C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2015 |
|
RU2584545C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2015 |
|
RU2604871C2 |
| ЛОКАЛЬНАЯ ФАЗОВАЯ РАЗНОСТНО-ДАЛЬНОМЕРНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2604652C2 |
| ФАЗОРАЗНОСТНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2015 |
|
RU2597007C1 |
| Способ определения местоположения объекта навигации | 2018 |
|
RU2676862C1 |
Изобретение относится к радионавигации и может быть использовано в локальных навигационных системах и сетях для управления движением мобильных объектов в локальных зонах навигации. Достигаемый технический результат - повышение помехозащищенности. Способ основан на формировании объектом навигации двух высокочастотных гармонических сигналов с разными частотами, их одновременном излучении с объекта навигации и приеме в нескольких опорных радионавигационных точках с известными координатами, формировании в этих точках сигналов разностной частоты из принятых от объекта навигации высокочастотных сигналов, передаче сформированных сигналов разностной частоты в центральный пункт обработки, где измеряется разность фаз сигналов разностной частоты, поступивших из разных опорных точек, а результаты измерений разностей фаз с учетом взаимного расположения центрального приемного пункта и опорных радионавигационных точек пересчитываются в координаты объекта навигации, причем оба сформированных на объекте навигации гармонических сигнала перед излучением синхронно модулируют по фазе одной и той же псевдослучайной двоичной последовательностью с девиацией фазы 180°. 2 ил.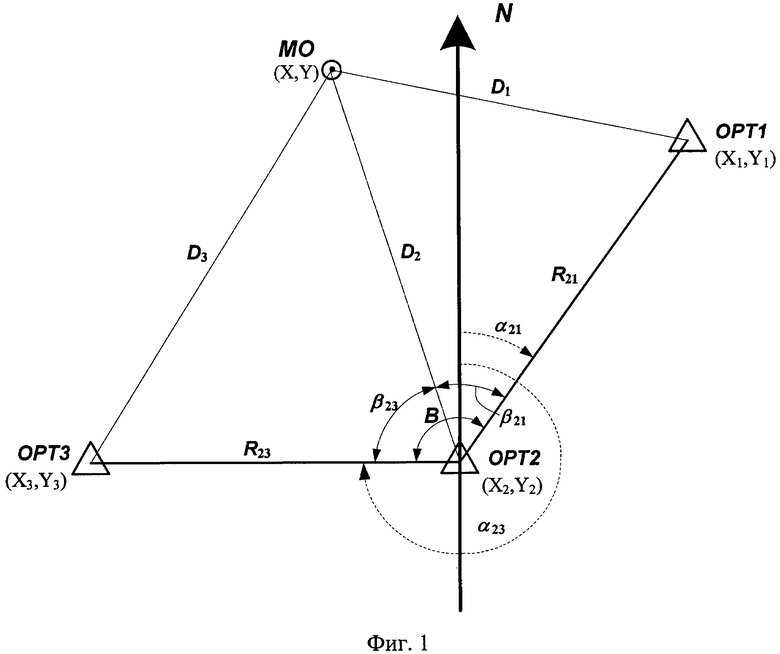
Способ определения местоположения объектов для систем локальной навигации, заключающийся в формировании объектом навигации двух высокочастотных гармонических сигналов с разными частотами, их одновременном излучении с объекта навигации и приеме в нескольких опорных радионавигационных точках с известными координатами, формировании в этих точках сигналов разностной частоты из принятых от объекта навигации высокочастотных сигналов, передаче сформированных сигналов разностной частоты в центральный пункт обработки, где измеряется разность фаз сигналов разностной частоты, поступивших из разных опорных точек, а результаты измерений разностей фаз с учетом взаимного расположения центрального приемного пункта и опорных радионавигационных точек пересчитываются в координаты объекта навигации, отличающийся тем, что оба сформированных на объекте навигации гармонических сигнала перед излучением синхронно модулируют по фазе одной и той же псевдослучайной двоичной последовательностью с девиацией фазы 180°.
| БАКУЛЕВ П.А | |||
| и др | |||
| Радиолокационные и радионавигационные системы | |||
| Москва, Радио и связь, 1994, с.211-214 | |||
| RU 2013129968 A, 10.01.2015 | |||
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| Приспособление для предупреждения обрыва нитей основы челноком и для останова круглого ткацкого станка при появлении в зеве препятствий | 1935 |
|
SU44190A1 |
| KR 2000014782 A, 15.03.2000 | |||
| US 6298304 B1, 02.10.2001 | |||
| WO 2001001076 A1, 04.01.2001 | |||
| JP 2011038925 A, 24.02.2011. | |||

