Изобретение относится к радионавигации и может быть использовано в локальных навигационных системах и сетях для управления движением мобильных объектов в локальных зонах навигации.
Известна система для определения местоположения движущегося по дорогам транспортного средства (Road vehicle locating system) [Международная заявка РСТ N89/12835: G01S 5/02, G08G 1/12 - (UK - заявл. 17.06.1988, опубл. 28.12.1989)], содержащая приемник сигналов, размешенный на центральной станции, навигационное устройство, размещенное на движущемся объекте, и передающий блок типа радиотелефона, соединенный с навигационным устройством.
Приемник является существенным признаком заявляемой системы.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является относительно низкая точность определения координат, так как координаты определяются навигационным устройством на основе данных радиомаяков, которые недостаточно точны.
Известна также система определения местоположения подвижных объектов (патент РФ №2013785 кл. G01S 13/00, 1994), содержащая центральный пункт, не менее четырех приемных пунктов, M передатчиков, приемные и передающие антенны, блоки измерения задержки, приемники.
Передатчики и приемники являются существенными признаками заявляемой системы.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является сложность реализации системы, что обусловлено большим объемом оборудования и необходимостью использования достаточно сложной системы единого времени.
Наиболее близким по технической сущности к изобретению (прототипом) является система для измерения координат объекта навигации (заявка на патент №2014118209/07(028837) от 05.05.2014, решение о выдаче патента от 18.05.2015).
Эта система содержит два установленных на объекте навигации передатчика высокочастотных сигналов с разными частотами, подключенных к общей антенне, размещенные в опорных радионавигационных точках три приемника с антеннами, три измерительных канала (каналы формирования разностной частоты), каждый из которых содержит последовательно включенные балансный смеситель, узкополосный фильтр, усилитель-ограничитель и резонансный усилитель, размещенные в центральном пункте обработки три фазовых детектора, три аналого-цифровых преобразователя и вычислитель координат объекта навигации.
Передатчики высокочастотных гармонических сигналов, три приемника этих сигналов с антеннами, три измерительных канала (каналы формирования разностной частоты), каждый из которых содержит последовательно включенные балансный смеситель, узкополосный фильтр, усилитель-ограничитель и резонансный усилитель, три фазовых детектора, три аналого-цифровых преобразователя и вычислитель координат объекта навигации являются существенными признаками и заявляемой системы.
Причиной, препятствующей обеспечению в системе-прототипе технического результата, обеспечиваемого изобретением, является низкий уровень помехозащищенности системы по отношению к возможности подавления ее работы умышленными помехами со стороны потенциального злоумышленника. Это обусловлено высокой спектральной плотностью излучаемых объектом навигации сигналов вблизи несущей частоты, что облегчает злоумышленнику возможность обнаружения используемых рассматриваемой системой сигналов, измерения их частот и, как следствие, возможность подавления работы системы прицельными по частоте активными помехами.
Другой причиной, препятствующей достижению в системе-прототипе технического результата, обеспечиваемого изобретением, является снижение точности измерения координат объекта навигации из-за нестабильности частот передатчиков высокочастотных гармонических сигналов.
Технической задачей, на решение которой направлено изобретение, является повышение помехозащищенности системы по отношению к возможности подавления ее работы умышленными помехами со стороны потенциального злоумышленника и повышение точности определения координат объекта навигации.
Для достижения указанного технического результата в известную систему, содержащую установленные на объекте навигации и подключенные к общей антенне первый и второй передатчики высокочастотных сигналов с разными несущими частотами, размещенные в трех опорных радионавигационных точках с известными координатами три приемника этих сигналов с антеннами, три измерительных канала (каналы формирования разностной частоты), каждый из которых содержит последовательно включенные балансный смеситель узкополосный фильтр, усилитель-ограничитель и резонансный усилитель, выход которого является выходом измерительного канала, при этом выходы каждого приемника соединены с обоими входами балансного смесителя соответствующего измерительного канала, установленные в центральном пункте обработки три фазовых детектора, три аналого-цифровых преобразователя и вычислитель координат объекта навигации, при этом первый вход первого фазового детектора соединен со вторым входом третьего фазового детектора и выходом первого измерительного канала, второй вход первого фазового детектора соединен с первым входом второго фазового детектора и выходом второго измерительного канала, первый вход третьего фазового детектора соединен со вторым входом второго фазового детектора и выходом третьего измерительного канала, а каждый из аналого-цифровых преобразователей включен между выходом соответствующего фазового детектора и соответствующим входом вычислителя координат объекта навигации, введены размещенные на объекте навигации опорный кварцевый генератор, генератор псевдослучайной двоичной последовательности импульсов, делитель частоты, а каждый из установленных на объекте передатчиков высокочастотных сигналов содержит последовательно соединенные синтезатор частоты, фазовый модулятор и усилитель высокочастотного сигнала, выход которого является выходом соответствующего передатчика, при этом выход опорного кварцевого генератора подключен к входам обоих синтезаторов частот каждого из передатчиков высокочастотных сигналов, и одновременно через делитель частоты к тактовому входу генератора псевдослучайной двоичной последовательности импульсов, выход которого соединен с управляющими входами фазовых модуляторов каждого передатчика высокочастотных сигналов.
Сущность изобретения поясняется чертежами.
На фиг. 1 приведена структурная схема предлагаемой системы;
на фиг. 2 - взаимное расположение объекта навигации и опорных радионавигационных точек с приемниками.
Система для измерения координат объекта навигации содержит размещенные на объекте навигации опорный кварцевый генератор 1, делитель частоты 2, генератор двоичной псевдослучайной последовательности 3, подключенные к общей передающей антенне 7 два передатчика высокочастотных сигналов, каждый из которых состоит их последовательно соединенных синтезатора частоты 4.i (i=1, 2), фазового модулятора 5.i (i=1, 2) и усилителя высокочастотного сигнала 6.i (i=1, 2), выход которого является выходом соответствующего передатчика, размещенные в трех опорных радионавигационных точках с известными координатами три приемника 9.i 

Каждый из измерительных каналов содержит последовательно включенные балансный смеситель 10.i
Функционирование системы поясняется фиг. 2, на которой показаны мобильный объект навигации (МО), на котором размещены опорный кварцевый генератор 1, делитель частоты 3, генератор двоичной псевдослучайной последовательности импульсов 3, синтезаторы частоты 4.1 и 4.2, фазовые модуляторы 5.1 и 5.2, подключенные к входам усилителей высокочастотных сигналов 6.1 и 6.2, выходы которых подключены к общей передающей антенне 7. Опорные радионавигационные точки ОРТ1, ОРТ2 и ОРТ3 с приемниками 9.1, 9.2 и 9.3 и приемными антеннами 8.1, 8.2 и 8.3 расположены в точках с известными координатами X1 и Y1, X2 и Y2 и X3 и Y3 соответственно. Там же показаны расстояния D1, D2 и D3 между объектом навигации и опорными радионавигационными точками, а также направление N на север.
Кварцевый генератор генерирует опорный гармонический сигнал для синтезаторов частоты 4.1 и 4.2, которые формируют высокостабильные гармонические сигналы с жестко связанными между собой частотами ω0 и ω1. В фазовых модуляторах 5.1 и 5.2 из этих гармонических сигналов формируются два бинарных фазоманипулированных сигнала с частотами ω0 и ω1 и одинаковым законом изменения фаз, который задается генератором псевдослучайной двоичной последовательности r(t), подключенного к обоим управляющим входам фазовых модуляторов. Вследствие этого фазы фазоманипулированных сигналов на выходах обоих фазовых модуляторов изменяются синхронно по одному и тому же закону. Усиленные высокочастотными усилителями 6.1 и 6.2, широкополосные бинарные фазоманипулированные сигналы с частотами ω0 и ω1 через антенну 7 излучаются с объекта навигации в направлении точек ОРТ1, ОРТ2 и ОРТ3. Таким образом, излучаемый с объекта навигации широкополосный высокочастотный сигнал представляет собой сумму двух высокочастотных бинарных фазоманипулированных сигналов с разными жестко связанными между собой частотами ω0 и ω1, синхронно модулированных по фазе псевдослучайной двоичной последовательностью r(t):
 .
.
где А - амплитуда;
φ0 и φ1 - случайные начальные фазы гармонических сигналов, формируемых синтезаторами частоты 4.1 и 4.2;
r(t) - формируемая генератором 3 двоичная импульсная псевдослучайная последовательность, принимающая значения “+1” и “-1”.
Этот сигнал принимается в опорных радионавигационных точках ОРТ1, ОРТ2 и ОРТ3, находящихся на расстояниях D1, D2 и D3 от объекта навигации соответственно, приемниками 9.1, 9.2 и 9.3.
Принятые приемниками сигналы



где с=3·108 м/с - скорость распространения радиоволн в атмосфере,
поступают на входы соответствующих измерительных каналов (каналов формирования разностных частот).
Каждый из измерительных каналов состоит из последовательно включенных балансного смесителя 10.i 

Сигнал si(t)
1) сигнал с нулевой частотой (постоянная составляющая);
2) два гармонических сигнала с удвоенными частотами 2ω0 и 2ω1;
3) гармонический сигнал с суммарной частотой ωΣ = ω0 + ω1;
4) гармонический сигнал с разностной частотой  .
.
В узкополосных фильтрах 11.i
 , а остальные сигналы (постоянная составляющая и высокочастотные составляющие с частотами 2ω0, 2ω1 и ωΣ) подавляются. Сигналы разностной частоты с выходов фильтров 11.i
, а остальные сигналы (постоянная составляющая и высокочастотные составляющие с частотами 2ω0, 2ω1 и ωΣ) подавляются. Сигналы разностной частоты с выходов фильтров 11.i
Таким образом, на выходах измерительных каналов в радионавигационных точках ОРТ1, ОРТ2 и ОРТ3 сформируются соответственно гармонические сигналы разностной частоты ωp с постоянной амплитудой U:
 ,
,
 ,
,
 .
.
Фазы этих сигналов  ,
,  и
и  определяются соответственно расстояниями D1, D2 и D3 и разностью фаз φ0-φ1 сигналов с частотами ω0 и ω1, формируемых синтезаторами частоты 4.1 и 4.2.
определяются соответственно расстояниями D1, D2 и D3 и разностью фаз φ0-φ1 сигналов с частотами ω0 и ω1, формируемых синтезаторами частоты 4.1 и 4.2.
Сигналы разностных частот  ,
,  и
и  по проводам передаются в центральный пункт обработки (ЦПО), где установлены фазовые детекторы 14.1, 14.2, 14.3, аналого-цифровые преобразователи 15.1, 15.2, 15.3 и вычислитель 16 координат объекта навигации.
по проводам передаются в центральный пункт обработки (ЦПО), где установлены фазовые детекторы 14.1, 14.2, 14.3, аналого-цифровые преобразователи 15.1, 15.2, 15.3 и вычислитель 16 координат объекта навигации.
Таким образом, в ЦПО из опорных радионавигационных точек поступают три следующих сигнала разностной частоты.
 ,
,
Здесь Ai - амплитуда соответствующего сигнала;
Ri - расстояние между опорной радионавигационной точкой OPTi и ЦПО;
ν - скорость распространения радиосигнала в линиях связи, соединяющих опорные радионавигационные точки и ЦПП.
Сигналы ξip (t) отличаются от сигналов sip(t) амплитудами и дополнительными фазовыми сдвигами  , которые появляются при прохождении расстояний Ri, разделяющих соответствующую опорную точку OPTi и ЦПО. Эти сигналы можно представить в следующем виде:
, которые появляются при прохождении расстояний Ri, разделяющих соответствующую опорную точку OPTi и ЦПО. Эти сигналы можно представить в следующем виде:
 ,
,
где  .
.
В соответствии с применяемым в системе фазовым разностно-дальномерным методом в ней измеряются разности фаз сигналов, принятых в разных парах опорных радионавигационных точек. Для пар опорных точек ОРТ2-ОРТ1 и ОРТ2-ОРТ3 на выходах фазовых детекторов 14.1 и 14.2 формируются напряжения, пропорциональные разностям фаз Δψ21 = ψ2 - ψ1 для сигналов ξ2p(t), ξ1р(t) и Δψ23 = ψ2 - ψ3 для сигналов ξ2р(t), ξ3р(t):


Из этих выражений следует, что величины измеряемых в ЦПО разностей фаз Δψ21 и Δψ23 не зависят от начальных фаз φ0 и φ1, сигналов с частотами ω0 и ω1, формируемых синтезаторами частоты 4.1 и 4.2.
Исключив из последних выражений для Δψ21 и Δψ23 известные и не зависящие от координат объекта навигации фазовые сдвиги  и
и  , получим исходные выражения для расчета координат объекта навигации:
, получим исходные выражения для расчета координат объекта навигации:
 ,
,
 .
.
Величины Δφ21 и Δφ23 представляют собой разности фаз сигналов на частоте ωр соответственно между второй-первой и второй-третьей опорными точками. Указанные разности фаз однозначно соответствуют разностям дальностей D2-D1 и D2-D3 соответственно.
По найденным таким путем разностям фаз Δφ21 и Δφ23 можно рассчитать координаты объекта навигации. Алгоритм расчета приводится ниже.
Исходными данными для расчета являются:
- измеренные в ЦПО на частоте ωр разности фаз Δψ21р и Δψ23р сигналов ξ2p(t), ξ1p(t) и ξ2p(t), ξ3p(t), для радионавигационных точек ОРТ2-ОРТ1 и ОРТ2-ОРТ3;
- значения частот ω0 и ω1 гармонических сигналов, формируемых первым 4.1 и вторым 4.2 синтезаторами частот;
- скорость распространения радиоволн в атмосфере с;
- скорость распространения радиосигнала ν между опорными навигационными точками и ЦПО;
- расстояние R21 между второй и первой опорными радионавигационными точками;
- расстояние R23 между второй и третьей опорными радионавигационными точками;
- расстояния R1, R2 и R3 между ЦПО и ОРТ1, ОРТ2 и ОРТ3 соответственно;
Порядок расчета следующий.
1. Вычисляется разностная частота  .
.
2. Измеренные в ЦПО разности Δψ21р и Δψ23р пересчитываются к опорным радионавигационным точкам ОРТ2-ОРТ1 и ОРТ2-ОРТ3:
 ;
;
 .
.
3. Решается навигационная задача - определяются координаты объекта навигации:
а) вычисляются разности расстояний от объекта навигации до опорных точек
 ,
,
 ,
,
где D1, D2, D3 - расстояния от объекта навигации (МО) до первой ОРТ1, второй ОРТ2 и третьей ОРТ3 опорных радионавигационных точек в соответствии с фиг. 2;
б) разности расстояний ΔD21 и ΔD23 нормируются по длинам базовых линий R21 и R23 и вычисляется параметр γ:
 ,
,  ,
,  ;
;
в) определяются вспомогательные параметры:
а = α21 - α23; b = γ · Δd23 - Δd21,
где α21 - угол между осью у и базовой линией R21;
α23 - угол между осью у и базовой линией R23;
г) каким-либо из численных итерационных методов (например, методом деления отрезка пополам) решается уравнение для вычисления угла β23 между базовой линией R23 и направлением на объект навигации:
cos(a - β23) - γ cos β23 = b;
д) вычисляется расстояние D2 от точки ОРТ2 до объекта навигации
 ;
;
е) вычисляются координаты объекта навигации в местной прямоугольной системе координат:
X = D2 cos(α23 + β23),
Y = D2 sin(α23 + β23).
Таким образом, в предлагаемой системе сохраняются все возможности измерения координат объекта навигации, что и в системе-прототипе. Кроме того, вследствие фазовой модуляции излучаемых сигналов случайной двоичной последовательностью импульсов в ней может быть существенно расширен спектр излучаемых объектом навигации сигналов, вследствие чего уменьшается их спектральная плотность и затрудняется возможность их обнаружения и подавления возможным злоумышленником работы предлагаемой системы с помощью прицельных по частоте помех.
Ширина спектра  бинарных фазоманипулированных сигналов, излучаемых с объекта навигации определяется средней длительностью импульсов
бинарных фазоманипулированных сигналов, излучаемых с объекта навигации определяется средней длительностью импульсов  и модулирующей псевдослучайной последовательности r(t).
и модулирующей псевдослучайной последовательности r(t).
Выбирая достаточно малым, ширину спектра излучаемых сигналов можно увеличить в сравнении с прототипом в десятки - сотни раз и соответственно во столько же раз уменьшить их спектральную плотность.
При выборе средней скважности модулирующей двоичной последовательности, близкой к 2 (например, если в качестве такой последовательности использовать М-последовательность), в спектре излучаемых практически сигналов будут практически отсутствовать спектральные составляющие с частотами ω0 и ω1. Низкая спектральная плотность излучаемых сигналов и отсутствие в их спектре составляющих с несущими частотами в совокупности с малым временем излучения сигнала затрудняет обнаружение излучаемых с объекта навигации сигналов и измерение частот ω0 и ω1. Вследствие этого существенно затрудняется возможность подавления потенциальным злоумышленником работы радионавигационных систем, использующих предлагаемый способ. Это значительно повышает в сравнении с прототипом помехоустойчивость предлагаемой системы по отношению к возможности подавления ее работы с помощью организованных помех.
Помимо этого, в предлагаемой системе исключена присущая системе-прототипу составляющая погрешности измерения координат, обусловленная нестабильностью частот ω0 и ω1 высокочастотных сигналов, излучаемых передатчиками, установленными на объекте навигации. Из-за нестабильности частот этих сигналов в системе-прототипе может случайным образом изменяться разностная частота  и как следствие этого снижаться точность измерения координат объекта навигации. В предлагаемой системе для формирования гармонических сигналов с частотами ω0 и ω1 используются два синтезатора частоты, использующих с общий опорный генератор. Вследствие этого излучаемые с объекта навигации высокочастотные сигналы с частотами ω0 и ω1 жестко связаны друг с другом по частоте, поэтому увеличивается стабильность разностной частоты и возрастает точность измерения координат объекта навигации.
и как следствие этого снижаться точность измерения координат объекта навигации. В предлагаемой системе для формирования гармонических сигналов с частотами ω0 и ω1 используются два синтезатора частоты, использующих с общий опорный генератор. Вследствие этого излучаемые с объекта навигации высокочастотные сигналы с частотами ω0 и ω1 жестко связаны друг с другом по частоте, поэтому увеличивается стабильность разностной частоты и возрастает точность измерения координат объекта навигации.
Техническая реализация системы не вызывает затруднений.
Для реализации высокочастотных сигналов может быть выбран диапазон 1200-1400 МГц. В этом диапазоне легко обеспечить выполнение условия узкополосности при передаче и приеме двух сигналов и одновременно избежать больших потерь энергии радиосигналов в атмосфере.
В качестве синтезаторов частоты 4.1, 4.2 можно использовать микросхему типа ADF4360-5, в качестве фазовых модуляторов 5.1 и 5.2 - балансный модулятор типа RF2638. В качестве формирователя двоичной псевдослучайной последовательности генератор линейной рекуррентной последовательности на основе регистра сдвига с обратными связями, в качестве усилителей высокочастотных сигналов 6.1 и 6.2 могут быть использованы интегральные СВЧ-усилители типа SPF5122Z.
В качестве антенн 7, 8.1, 8.2 и 8.3 можно использовать полуволновый вибратор. Для суммирования сигналов с выходов усилителей 6.1 и 6.2 можно применить микрополосковый сумматор с двумя входами.
В качестве приемников 9.1, 9.2 и 9.3 сигнала можно использовать СВЧ-усилители типа SPF5122Z, в качестве фазовых детекторов 14.1, 14.2 и 14.3 - микросхему типа SYPD-1.
В качестве аналого-цифровых преобразователей 15.1, 15.2 и 15.3 и вычислителя 16 можно использовать микросхему STM32F407, содержащую два встроенных 12-разрядных аналого-цифровых преобразователя и 16-разрядный микропроцессор.
Балансные смесители 10.i могут быть реализованы на транзисторах BFP620.
В качестве узкополосных фильтров 11.i можно использовать активные полосовые фильтры второго порядка на операционном усилителе AD797ANZ.
В качестве усилителей-ограничителей 12.i можно использовать логарифмический усилитель AD8309.
В качестве резонансного усилителя 13.i также можно использовать активные полосовые фильтры второго-четвертого порядка на операционных усилителях AD797ANZ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОРАЗНОСТНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА С ШИРОКОПОЛОСНЫМ СИГНАЛОМ | 2015 |
|
RU2602506C1 |
| ЛОКАЛЬНАЯ ФАЗОВАЯ РАЗНОСТНО-ДАЛЬНОМЕРНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2604652C2 |
| ФАЗОВЫЙ РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2014 |
|
RU2575483C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ ДЛЯ СИСТЕМ ЛОКАЛЬНОЙ НАВИГАЦИИ | 2015 |
|
RU2588057C1 |
| СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА НАВИГАЦИИ | 2014 |
|
RU2567114C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2015 |
|
RU2584545C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2015 |
|
RU2604871C2 |
| ФАЗОРАЗНОСТНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2015 |
|
RU2597007C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2014 |
|
RU2559813C1 |
| Способ определения местоположения объекта навигации | 2018 |
|
RU2676862C1 |

Изобретение относится к радионавигации и может быть использовано в локальных навигационных системах и сетях для управления движением мобильных объектов в локальных зонах навигации. Достигаемый технический результат - повышение помехозащищенности системы и повышение точности определения координат объекта навигации. Указанный результат достигается за счет того, что система содержит размещенные на объекте навигации опорный кварцевый генератор, делитель частоты, генератор двоичной псевдослучайной последовательности, два синтезатора частоты, два фазовых модулятора, два усилителя высокочастотных сигналов, общая передающая антенна, три приемника, три приемных антенны, установленные в опорных радионавигационных точках с известными координатами, три измерительных канала (каналы формирования разностной частоты), три фазовых детектора, три аналого-цифровых преобразователя и вычислитель координат объекта навигации, при этом каждый из измерительных каналов содержит балансный смеситель, узкополосный фильтр, усилитель-ограничитель и резонансный усилитель. Перечисленные средства определенным образом соединены между собой. 2 ил.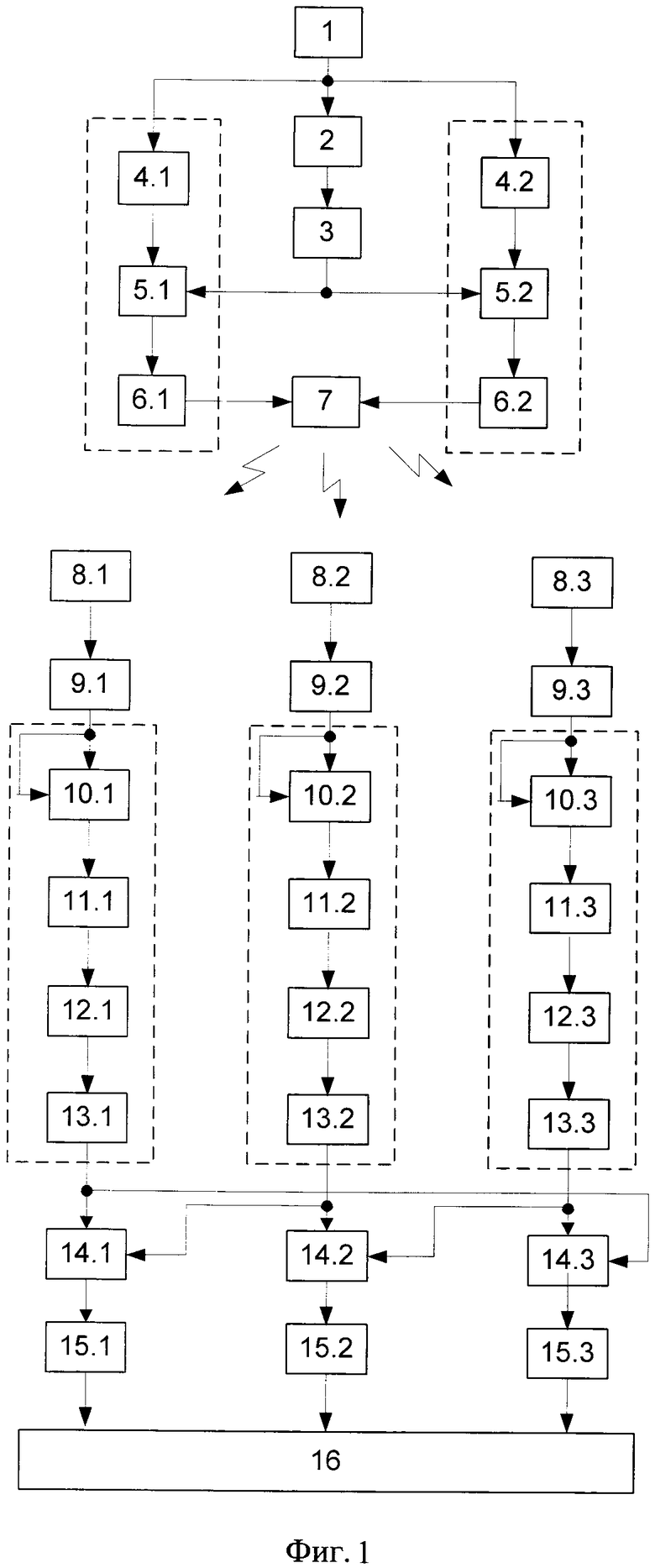
Широкополосная фазоразностная локальная навигационная система, содержащая установленные на объекте навигации и подключенные к общей антенне первый и второй передатчики высокочастотных сигналов с разными несущими частотами, размещенные в трех опорных радионавигационных точках с известными координатами, три приемника этих сигналов с антеннами, три измерительных канала, каждый из которых содержит последовательно включенные балансный смеситель, узкополосный фильтр, усилитель-ограничитель и резонансный усилитель, выход которого является выходом измерительного канала, при этом выходы каждого приемника соединены с обоими входами балансного смесителя соответствующего измерительного канала, установленные в центральном пункте обработки три фазовых детектора, три аналого-цифровых преобразователя и вычислитель координат объекта навигации, при этом первый вход первого фазового детектора соединен со вторым входом третьего фазового детектора и выходом первого измерительного канала, второй вход первого фазового детектора соединен с первым входом второго фазового детектора и выходом второго измерительного канала, первый вход третьего фазового детектора соединен со вторым входом второго фазового детектора и выходом третьего измерительного канала, а каждый из аналого-цифровых преобразователей включен между выходом соответствующего фазового детектора и соответствующим входом вычислителя координат объекта навигации, отличающаяся тем, что в систему введены размещенные на объекте навигации опорный кварцевый генератор, генератор псевдослучайной двоичной последовательности импульсов, делитель частоты, а каждый из установленных на объекте передатчиков высокочастотных сигналов содержит последовательно соединенные синтезатор частоты, фазовый модулятор и усилитель высокочастотного сигнала, выход которого является выходом соответствующего передатчика, при этом выход опорного кварцевого генератора подключен к входам обоих синтезаторов частот каждого из передатчиков высокочастотных сигналов и одновременно через делитель частоты к тактовому входу генератора псевдослучайной двоичной последовательности импульсов, выход которого соединен с управляющими входами фазовых модуляторов каждого передатчика.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2014 |
|
RU2559813C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2258240C2 |
| Устройство для сложения мощностей ультракоротковолновых передатчиков | 1957 |
|
SU142346A1 |
| WO 2012042315 A1, 05.04.2012 | |||
| JP 5116818 B2, 09.01.2013 | |||
| JP 2007248422 A, 27.09.2007 | |||
| WO 2006129003 A2, 07.12.2006. | |||

