Изобретение относится к радионавигации и может быть использовано в локальных навигационных системах в условиях пересеченной местности и отсутствия сигналов глобальной спутниковой навигационной системы.
Известны способы определения местоположения объекта в соответствии с патентами РФ: №2510046, MПK G01S 19/00, опубл. 20.03.2014 г.; №2606240, MПK G01S 5/14, опубл. 10.01.2017 г. и №2602833, МПК G01C 21/00, опубл. 20.11.2016 г., которые обеспечивают высокую точность определения местоположения мобильных объектов. Однако при их реализации высокие точностные характеристики обеспечиваются на ограниченной области пространства (над взлетной площадкой корабля, аэродрома и т.п.).
Известен обращенный разностно-дальномерный способ определения координат (см. Кинкулькин И.Е., Рубцов В.Д., Фабрик М.А. Фазовый метод определения координат. - М.: Сов. радио, 1979, с. 10-11 и 97-100; Смирнов Ю.А. Радиотехническая разведка. - М.: Воениздат, 2001. - 456 с.).
Способ заключается в одновременном излучении объектом навигации и передатчиком пункта обработки, установленным в неподвижной точке с известными координатами, непрерывных гармонических высокочастотных сигналов и одновременном приеме этих сигналов в нескольких опорных радионавигационных пунктах. Далее на их основе в радионавигационных пунктах формируют сигналы разностной частоты, которые передают на пункт обработки для определения координат объекта навигации. Способ обеспечивает определение местоположения объекта навигации. Однако ему присущи следующие недостатки:
способ-аналог предполагает непрерывное излучение сигналов передатчиком пункта обработки, что ухудшает условия электромагнитной совместимости оборудования. При этом существует необходимость одновременного приема и передачи двух сигналов с близкими частотами, что дополнительно ухудшает информационную безопасность системы навигации и облегчает возможность блокирования ее работы;
координаты передатчика пункта обработки определяются с некоторой погрешностью, что влечет за собой снижение точностных характеристик локальной системы навигации;
небольшие размеры области пространства, в пределах которой возможно однозначное определение координат объекта навигации с высокой точностью;
аналог теряет свою работоспособность в условиях пересеченной местности.
Наиболее близким по технической сущности к заявленному является «Способ определения местоположения объекта навигации» (см. Пат. РФ №2604871, МПК G01S 13/00, опубл. 20.12.2016 г., бюл. №35).
Способ-прототип заключается в излучении объектом навигации в течение заданное интервала времени Δt двух высокочастотных гармонических сигналов S1(t) и S2(t), частоты которых отличаются на определенную величину ΔF1, приеме сигналов S1(t) и S2(t) в нескольких пространственно разнесенных опорных радионавигационных пунктах, формировании из принятых сигналов разностей частоты, передаче сформированных сигналов на центральный пункт обработки, где измеряют разности фаз сигналов разностной частоты, полученных из разных опорных радионавигационных пунктов, фиксации результатов этих измерений, неоднократном повторении названных выше операций, изменении частоты второго гармонического высокочастотного сигнала S1(t) на  таким образом, что новая разностная частота увеличивается примерно на порядок, при этом интервал времени, в течение которого частота второго гармонического сигнала остается постоянной, выбирают из условия достаточности для измерения разности фаз сигналов разностной частоты, получаемых в опорных радионавигационных пунктах, пересчет по окончанию измерений всех зафиксированных разностей фаз в координаты объекта навигации с учетом взаимного расположения центрального пункта обработки и опорных радионавигационных пунктов.
таким образом, что новая разностная частота увеличивается примерно на порядок, при этом интервал времени, в течение которого частота второго гармонического сигнала остается постоянной, выбирают из условия достаточности для измерения разности фаз сигналов разностной частоты, получаемых в опорных радионавигационных пунктах, пересчет по окончанию измерений всех зафиксированных разностей фаз в координаты объекта навигации с учетом взаимного расположения центрального пункта обработки и опорных радионавигационных пунктов.
Способ-прототип обеспечивает достаточно высокую точность определения координат объектов навигации, обладает по сравнению с аналогами более высокой развед- и помехозащищенностью от преднамеренных помех, обеспечивает большие размеры области, в пределах которой возможно однозначное определение координат объекта навигации с высокой точностью.
Однако прототипу присущ и ряд недостатков. К их числу можно отнести следующее:
эффективность способа по основным критериям (точности, доступности) резко падает в условиях пересеченной местности, городской застройки, горном рельефе и др.;
обладает низкой мобильностью (гибкостью) при необходимости изменения границ локальной зоны, отсутствует возможность взаимодействия с соседними локальными зонами навигации (передаче объектов навигации и информации о них из одной зоны в другую по принципу сотовых систем связи, совместное использование опорных радионавигационных пунктов в интересах прилегающих локальных зон навигации и др.);
недостаточная защищенность от широкого класса помех включая промышленные и др.
Целью заявленного технического решения является разработка способа определения местоположения объекта навигации, обеспечивающего работоспособность в условиях пересеченной местности и отсутствия сигналов глобальной спутниковой навигационной системы в сложной сигнально-помеховой обстановке.
Поставленная цель достигается тем, что в известном способе определения местоположения объекта навигации, заключающемся в излучении объектом навигации в течение заданного интервала времени Δt двух высокочастотных гармонических сигналов S1(t) и S2(t), частотны которых w1 и w2 отличаются на определенную величину Δw1,2=|w1-w2|, приеме сигналов S1(t) и S2(t) в i, i≥3, опорных радионавигационных пунктах с известными координатами, измерении на центральном пункте обработки с известными координатами разности фаз Δϕij сигналов разностной частоты  , где i, j - номер опорного радионавигационного пункта, i≥3, i=1,2, …, j, …, фиксации результатов измерений Δϕij, i≥3, повторном выполнении названных операций с изменением частоты w2 на
, где i, j - номер опорного радионавигационного пункта, i≥3, i=1,2, …, j, …, фиксации результатов измерений Δϕij, i≥3, повторном выполнении названных операций с изменением частоты w2 на  второго гармонического сигнала S2(t) таким образом, чтобы новая разностная частота
второго гармонического сигнала S2(t) таким образом, чтобы новая разностная частота  увеличилась на порядок, а длительность излучения нового сигнала выбирают из условия достаточности для измерения разности фаз сигналов
увеличилась на порядок, а длительность излучения нового сигнала выбирают из условия достаточности для измерения разности фаз сигналов  разностных частот
разностных частот  , все зафиксированные величины разности фаз пересчитывают в координаты объекта навигации с учетом взаимного расположения центрального пункта обработки и опорных радионавигационных пунктов, при этом опорные радионавигационные пункты размещают на квадрокоптерах в точках с заданными координатами и на определенной высоте hi, в функцию которых входит ретрансляция сигналов S1(t) и S2(t) или S1(t) и
, все зафиксированные величины разности фаз пересчитывают в координаты объекта навигации с учетом взаимного расположения центрального пункта обработки и опорных радионавигационных пунктов, при этом опорные радионавигационные пункты размещают на квадрокоптерах в точках с заданными координатами и на определенной высоте hi, в функцию которых входит ретрансляция сигналов S1(t) и S2(t) или S1(t) и  от объекта навигации на центральный пункт обработки. На последнем с помощью направленных антенн осуществляют попарный прием сигналов S1(t) и S2(t) или S1(t) и
от объекта навигации на центральный пункт обработки. На последнем с помощью направленных антенн осуществляют попарный прием сигналов S1(t) и S2(t) или S1(t) и  и формирование разностной частоты
и формирование разностной частоты  . Измерение разности фаз сигналов Δϕij и
. Измерение разности фаз сигналов Δϕij и  на разностных частотах
на разностных частотах  и
и  , полученных от i-го и j-то опорных радионавигационных пунктов, осуществляют путем перемножения разностных сигналов
, полученных от i-го и j-то опорных радионавигационных пунктов, осуществляют путем перемножения разностных сигналов  и
и  . Для этого дополнительно определяют среднюю мощность составляющей шума
. Для этого дополнительно определяют среднюю мощность составляющей шума  смеси одного из входных сигналов
смеси одного из входных сигналов  или
или  и вычисляют ее из низкочастотной составляющей спектра результирующего сигнала Рс.
и вычисляют ее из низкочастотной составляющей спектра результирующего сигнала Рс.
Для этого на подготовительном этапе на борт каждого квадрокоптера дополнительно устанавливают перестраиваемый ретранслятор, модуль радиосвязи и видеокамеру для обзора нижней полусферы, запоминают коэффициент дисторсии объектива видеокамеры, определяют ориентацию видеокамеры относительно борта квадрокоптера. В процессе формирования зоны навигации по командам центрального пункта обработки квадрокоптеры направляют в заданные закрепленные на местности опорные точки, созданные для топографической привязки. Зависают на заданной для каждого из них высоте hi над этими точками. Осуществляют постоянную коррекцию своего местоположения в пространстве по изображению, полученному с видеокамеры самостоятельно или под воздействием управляющих сигналов с центрального поста обработки.
Благодаря новой совокупности существенных признаков в заявляемом способе обеспечивается эффективная работа локальной системы навигации в условиях пересеченной местности и отсутствия сигналов глобальной спутниковой навигационной системы в сложной сигнально-помеховой обстановке, положительный эффект достигается благодаря гарантированному радиообмену на линиях: объект навигации (ОН) - опорные радионавигационные пункты (ОРНП) и опорные радионавигационные пункты - центральный пункт обработки (ЦПО) в СВЧ - диапазоне радиоволн. Поднятые на необходимую высоту ОРНП обеспечивает взаимную прямую видимость между навигационными абонентами. Однако подъем ОРНП в совокупности с использованием ненаправленных антенн на его борту предполагает ухудшение сигнально-помеховой обстановки. Ветровые нагрузки на ОРНП (квадрокоптеры) привносят нестабильность их пространственного местоположения, что отрицательно влияет на точностные характеристики способа. В связи с этим предлагается использовать один из подходов улучшения соотношения сигнал / шум при измерении разности фаз разностных сигналов  . Выполненный анализ показал, что точностные характеристики способа можно улучшить за счет увеличения количества ОРНП до пяти.
. Выполненный анализ показал, что точностные характеристики способа можно улучшить за счет увеличения количества ОРНП до пяти.
Заявляемый способ поясняется чертежами, на которых показаны:
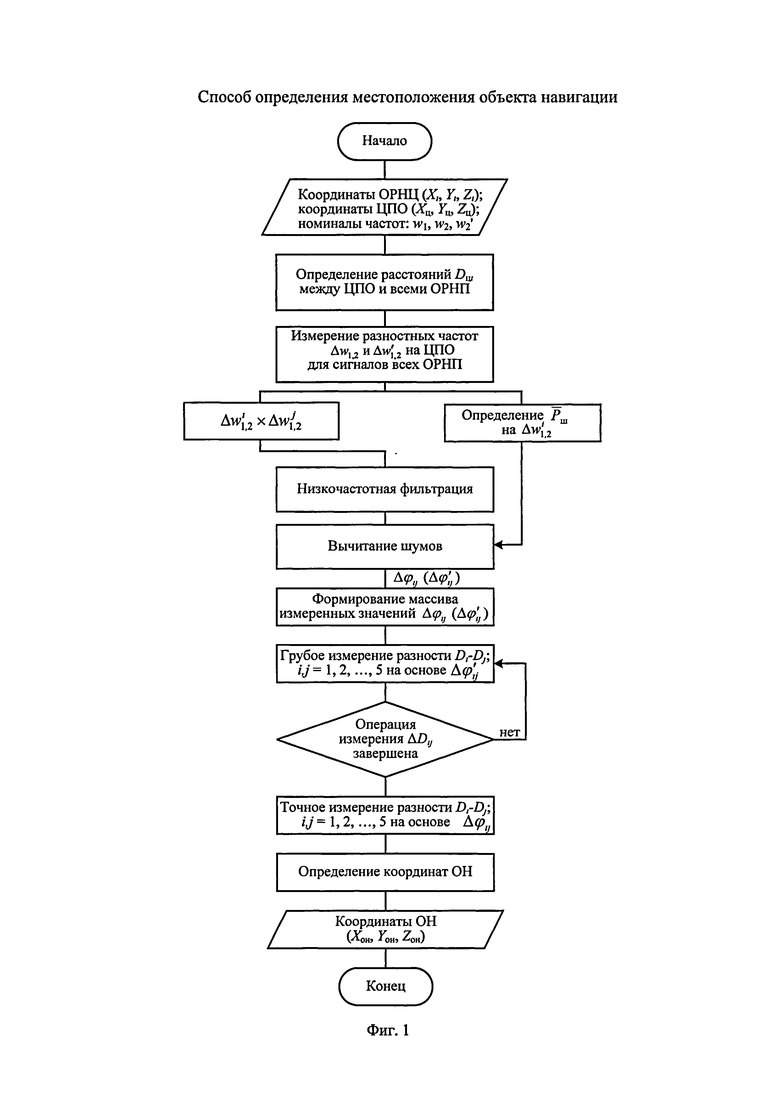
на фиг. 1 - обобщенный алгоритм определения местоположения объекта навигации;
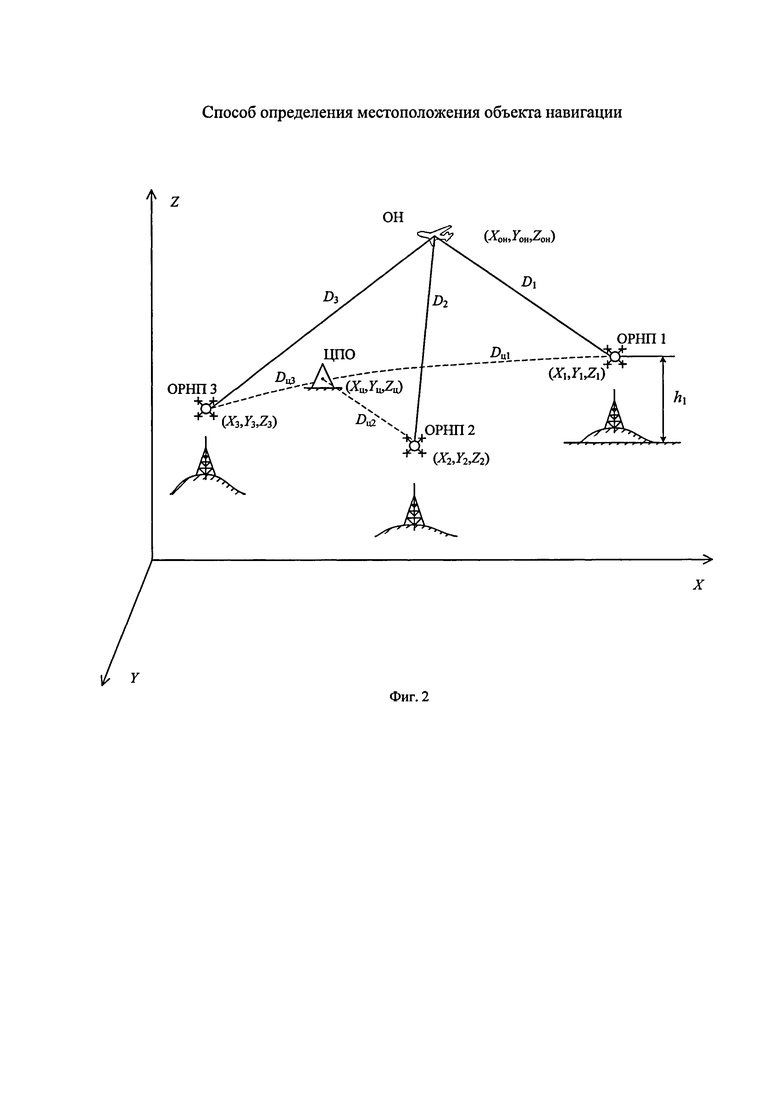
на фиг. 2 - взаимное расположение объекта навигации и элементов локальной навигационной системы в левосторонней системе декартовых координат;
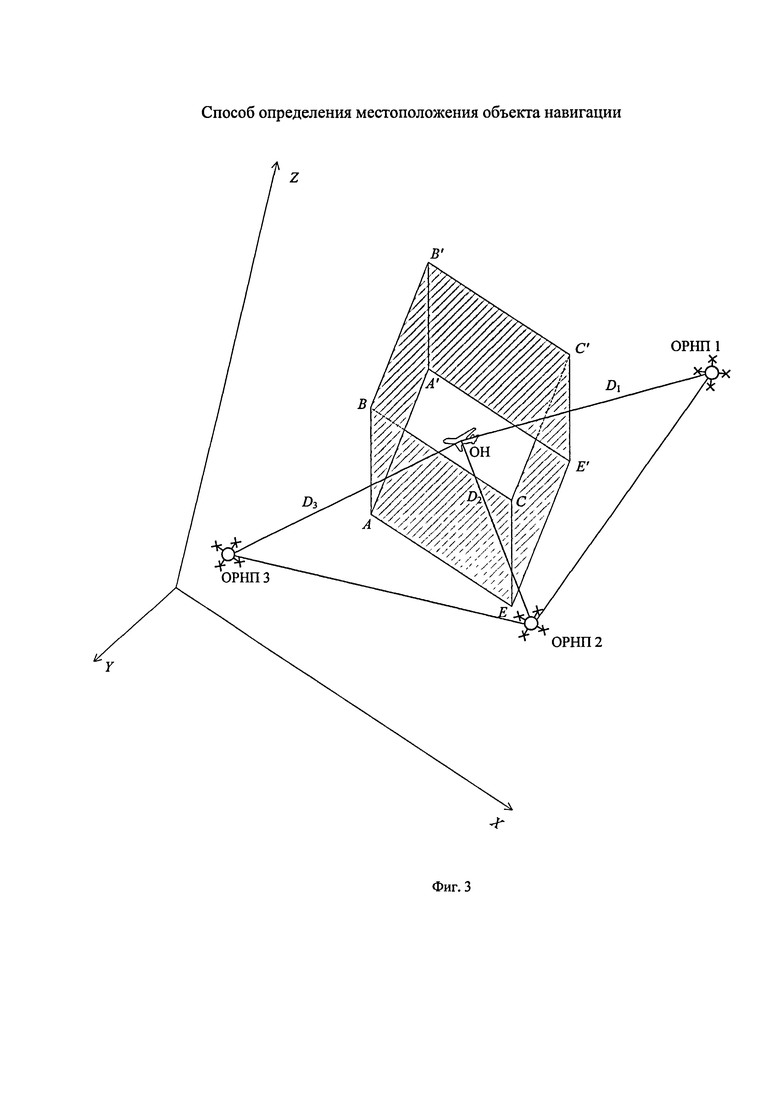
на фиг. 3 - пространство однозначного определения координат объекта навигации;
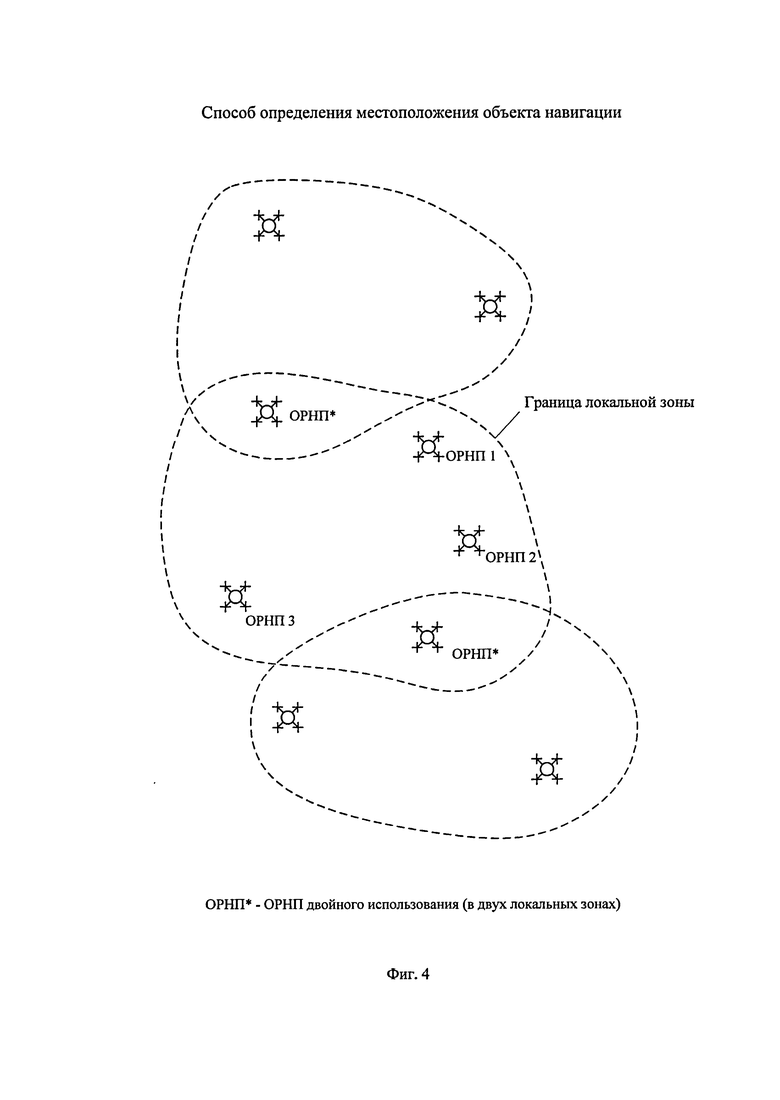
на фиг. 4 - вариант задействования ОРНП из прилегающих локальных навигационных систем.
Реализация заявляемого способа поясняется следующим образом (см. фиг. 1 и 2). На подготовительном этапе задают местоположение ЦПО и каждого ОРНП. Последние целесообразно размещать по периметру локальной зоны навигации. Основанием для этого является достижение максимально возможной точности измерений в заданном районе, базирующийся на геометрическом факторе их пространственного положения. Так, при наличии четырех ОРНП оптимальным их расположением являются вершины квадрата (см. Кондратьев О.С., Котов А.Ф., Марков Л.Н. Многопозиционные радиотехнические системы. - М.: Радио и связь, 1986. - 264 с). Для трех ОРНП оптимальным является их размещение в вершинах равностороннего треугольника. В условиях отсутствия сигналов глобальной навигационной спутниковой системы и дефицита времени в качестве точек для развертывания ОРНП целесообразно выбирать триангуляционные знаки, составляющие опорную географическую сеть страны, трубы предприятий, развилки дорого и другие пространственно-контрастные точки с априорно известными координатами. Оператор ЦПО выполняет анализ рельефа местности в заданном районе и определяет необходимую высоту зависания hi каждого ОРНП для обеспечения прямой видимости на интервалах связи ОН - ОРНП и ОРН - ЦПО.
После этого по командам с ЦПО все ОРНП выдвигаются в заданные точки, где последние зависают на определенной для каждого пункта высоте. Для облегчения функции управления с бортов квадрокоптеров осуществляют трансляцию видеоизображения на ЦПО во время их полета в заданные пространственные точки.
Следующей задачей, стоящей перед каждым ОРНП, является точное занятие пространственного местоположения (по видеоизображению над заданной точкой) и постоянная его коррекция из-за воздействия разного рода дестабилизирующих факторов, например, ветровой нагрузки. Может выполняться автоматически с помощью блока управления квадрокоптера по видеоизображению, так и опосредованно - по сигналам управления с ЦПО.
От качества выполнения этой операции в значительной степени зависят точностные характеристики заявляемого способа.
Пусть объект навигации находится в точке с неизвестными координатами (Хн, Yн, Zн). Опорные радионавигационные пункты ОРНП1, ОРНП 2 и ОРНП 3 расположены в известных пространственных точках с координатами (X1, Y1, Z1), (X2, Y2, Z2) и (Х3, Y3, Z3) соответственно. Координаты центрального пункта обработки также известны (Хц, Yц, Zц=0). На подготовительном этапе определяют расстояния между ЦПО и каждым ОРНП в соответствии с выражением

где i - номер ОРНП.
В процессе работы локальной радионавигационной системы объект навигации излучает сигнал Sн(t), представляющий собой совокупность двух высокочастотных гармонических сигналов S1(t) и S2(t) частотами w1 и w2 равной мощности (A1=A2)

Излучаемый ОН сигналы принимают ОРНП, удаленные от него в общем случае на различные расстояния Di

где Хон, Yон, Zон - искомые пространственные координаты объекта навигации.
Совокупность принятых i-тым ОРНП сигналов S1(t) и S2(t) имеют вид

где с - скорость распространения радиоволн в атмосфере. Значения  , i=3, 4, …, характеризуют пространственное местоположение ОН.
, i=3, 4, …, характеризуют пространственное местоположение ОН.
На следующем этапе принятые в ОРНП сигналы S1(t) и S2(t) ретранслируют на ЦПО. Здесь сначала формируют сигналы разностной частоты  из совокупности излучений S1(t) и S2(t) каждого i-го ОРНП (частотой биения)
из совокупности излучений S1(t) и S2(t) каждого i-го ОРНП (частотой биения)

В результате имеем

Однако полученное значение  содержит постоянную составляющую фазового сдвига
содержит постоянную составляющую фазового сдвига  , не несущую информацию о местоположении ОН и вносящую погрешность в результаты измерений. Это связано с тем, что дистанция прохождения радиосигналов S1(t) и S2(t) дополнительно увеличилась на значение
, не несущую информацию о местоположении ОН и вносящую погрешность в результаты измерений. Это связано с тем, что дистанция прохождения радиосигналов S1(t) и S2(t) дополнительно увеличилась на значение  , что и влечет за собой погрешность измерений. Однако на подготовительном этапе все величины , i=3, 4, …, были измерены, а номиналы w1 и w2 априорно известны. В связи с этим становится возможным предварительный учет дополнительно вносимого фазового сдвига
, что и влечет за собой погрешность измерений. Однако на подготовительном этапе все величины , i=3, 4, …, были измерены, а номиналы w1 и w2 априорно известны. В связи с этим становится возможным предварительный учет дополнительно вносимого фазового сдвига  .
.
Далее на ЦПО измеряют разность фаз Δϕij разностных сигналов  и
и  i-го и j-го ОРНП. Сделаем переобозначение:
i-го и j-го ОРНП. Сделаем переобозначение:  . Тогда разность фаз
. Тогда разность фаз

Анализ (7) позволяет сделать следующие выводы. Разность фаз сигналов Δϕij не зависит от начальных фаз ϕ1 и ϕ2 излучаемых ОН сигналов S1(t) и S2(t). Фазовые набеги  и
и  не зависят от пространственного положения ОН и полностью определяются местоположением ЦПО относительно ОРНП. Последние рассчитываю на подготовительном этапе. Измерение Δϕij позволяет определить разность дальностей Di-Dj. Следовательно Δϕij и разность Di-Dj имеют прямопропорциональную зависимость, а совокупность Δϕij характеризуют местоположение ОН в пространстве.
не зависят от пространственного положения ОН и полностью определяются местоположением ЦПО относительно ОРНП. Последние рассчитываю на подготовительном этапе. Измерение Δϕij позволяет определить разность дальностей Di-Dj. Следовательно Δϕij и разность Di-Dj имеют прямопропорциональную зависимость, а совокупность Δϕij характеризуют местоположение ОН в пространстве.
Ухудшение сигнально-помеховой обстановки вследствие подъема ОРНП над поверхностью земли предлагается компенсировать следующим образом. Измерение разности фаз Δϕij обычно осуществляют путем перемножения входных сигналов с последующей фильтрацией низкочастотной составляющей их произведения, которая имеет функциональную зависимость от разности фаз сигналов на входе (см. Измерения в электронике: Справочник / В.А. Кузнецов, В.А. Долгов, В.М. Коневский и др. Под ред. В.А. Кузнецова. - М.: Энергоатомиздат, 1987. - 512 с., с. 307). Однако при низких отношениях сигнал / шум данный подход приводит к большим погрешностям в измерениях Δϕij. В связи с этим предлагается повысить точность измерения Δϕij за счет увеличения отношения сигнал / шум. Для этого определяют среднюю мощность составляющей шума  аддитивной смеси одного из входных радиосигналов (например, разностного сигнала i-го ОРНП
аддитивной смеси одного из входных радиосигналов (например, разностного сигнала i-го ОРНП  , которую вычитают из средней мощности низкочастотной составляющей спектра полученного сигнала, т.е. компенсируют составляющую шума результирующего сигнала. Это приводит к увеличению отношения сигнал / шум.
, которую вычитают из средней мощности низкочастотной составляющей спектра полученного сигнала, т.е. компенсируют составляющую шума результирующего сигнала. Это приводит к увеличению отношения сигнал / шум.
Определение средней мощности шумовой составляющей аддитивной смеси может быть выполнено по методике (см. Бубенщиков А.А., Владимиров В.И. и др. Одновременное измерение мощности сигнала и мощности шума (помехи) в полосе пропускания основного канала радиоприема//Информационно-измерительные и управляющие системы, №7, 2012. с. 67-73), а мощность низкочастотной составляющей результирующего сигнала Рс на  определяют в соответствии с (см. Левин Б.Р. Теоретические основы статистической радиотехники. - 3-е изд., перераб. и доп. - М.: Радио и связь, 1989, стр. 484, 502).
определяют в соответствии с (см. Левин Б.Р. Теоретические основы статистической радиотехники. - 3-е изд., перераб. и доп. - М.: Радио и связь, 1989, стр. 484, 502).
Однозначное определение координат объекта навигации возможно только в той точке пространства, обслуживаемой радионавигационной системой, для которой фазовые сдвиги Δϕij, i, j=1, 2, 3, 4, …, не выходят за пределы интервала [-π/2÷π/2]. Область пространства, в которой с любой ее точки до любого из ОРНП различаются между собой не более чем на половину длины волны сигнала разностной частоты Δw1,2, является параллелепипедом (см. фиг. 3).
Для расширения пространства однозначного определения координат по аналогии с прототипом фазовые измерения осуществляют на двух разностных частотах Δw1,2 и  (используют S2(t) и
(используют S2(t) и  . Фазовые измерения осуществляют в два этапа. Оценку Δϕij на частотах
. Фазовые измерения осуществляют в два этапа. Оценку Δϕij на частотах  используют лишь для исключения неоднозначности фазовых измерений, а окончательные результаты получают при анализе Δw1,2.
используют лишь для исключения неоднозначности фазовых измерений, а окончательные результаты получают при анализе Δw1,2.
С целью определения дополнительных путей повышения эффективности предлагаемого способа выполнено имитационное моделирование по оценке зависимости точности определения местоположения ОН от количества ОРНП в локальной системе. При этом полагалось, что все ОРНП с известными координатами находятся на плоскости размером 10×10 км в вершинах многоугольника. Объект навигации размещен внутри этого многоугольника. Расстояние между ОН и ОРНП измеряется с заданной Δr точностью. Погрешность измерения распределена по нормальному закону. Ошибка является только положительной величиной. Результаты моделирования сведены в таблицу.
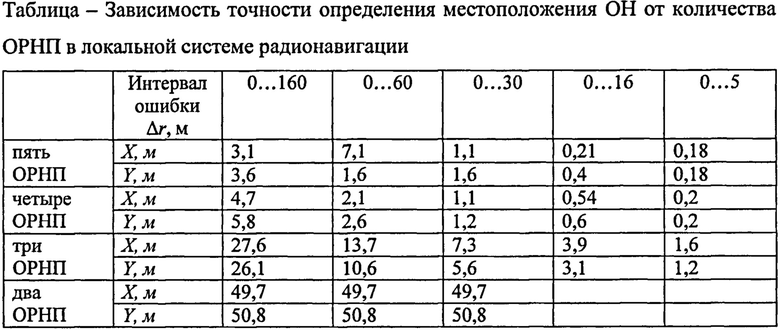
Из последней следует, что для достижения необходимых точностей местоопределения ОН достаточно четыре-пять ОРНП.
На фиг. 4 приведена ситуация, когда локальные системы радионавигации примыкают друг к другу. В этом случае становится возможным увеличением количества ОРНП в каждой системе за счет их совместного использования. Так, число ОРНП с минимальными затратами может быть увеличено с трех до пяти. Однако при этом номиналы используемых в работе частот w1 и w2 ( ) между соседними системами радионавигации должны отличаться. Кроме того, должна быть увеличена и канальность ретрансляторов ОРНП, используемых в двух системах.
) между соседними системами радионавигации должны отличаться. Кроме того, должна быть увеличена и канальность ретрансляторов ОРНП, используемых в двух системах.
Способ может быть реализован следующим образом. В качестве носителя ОРНП может быть использован гексакоптер производства Общества с ограниченной ответственностью «Специальный Технологический Центр», г. Санкт-Петербург (см. электронный ресурс http://www.stc-spb.ru). В качестве блока управления и видеокамеры целесообразно использовать серийно выпускаемую роботизированную скоростную купольную камеру «Speed Dome Ultra» (серия 35х). Имеет монтажное основание, защищенный корпус, 35-кратное оптическое масштабирование, автоматическую автофокусировку, EIS (электронный стабилизатор изображения), управляется через протокол RS-422. Дистанционное управление коррекцией местоположения ОРНЦ с ЦПО может осуществляться в соответствии с Пат РФ №2465613, МПК G01S 3/14. Самостоятельная коррекция местоположения ОРНП возможна на основе использования отредактированной системы управления, рассмотренной в Пат. РФ №2550811, МПК G01S 13/46.
Оборудование ОН содержит два синтезатора частоты (микросхемы ADF4360-5), опорного генератора NT 3225 SA или CSAC SA.45s. Для приема гармонических сигналов в ОРНП используют интегральные СВЧ-усилители - микросхемы SPF 5122z.
Способ может найти применение для построения локальной системы навигации в условиях сильно пересеченной местности, при возникновении чрезвычайных ситуаций и возникновении конфликтов различной интенсивности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2021 |
|
RU2775155C1 |
| Способ определения местоположения объекта навигации | 2024 |
|
RU2824861C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2015 |
|
RU2584545C1 |
| ФАЗОРАЗНОСТНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2015 |
|
RU2597007C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2015 |
|
RU2604871C2 |
| ФАЗОВЫЙ РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2014 |
|
RU2575483C2 |
| ЛОКАЛЬНАЯ ФАЗОВАЯ РАЗНОСТНО-ДАЛЬНОМЕРНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2604652C2 |
| ШИРОКОПОЛОСНАЯ ФАЗОРАЗНОСТНАЯ ЛОКАЛЬНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2602432C1 |
| ФАЗОРАЗНОСТНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА С ШИРОКОПОЛОСНЫМ СИГНАЛОМ | 2015 |
|
RU2602506C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ ДЛЯ СИСТЕМ ЛОКАЛЬНОЙ НАВИГАЦИИ | 2015 |
|
RU2588057C1 |
Изобретение относится к радионавигации и может быть использовано в локальных радионавигационных системах в условиях пересеченной местности, отсутствия сигналов глобальной спутниковой навигационной системы в сложной сигнально-помеховой обстановке. Достигаемым техническим результатом является обеспечение работоспособности локальной системы навигации в наиболее сложных условиях ее функционирования. Технический результат достигается тем, что для достижения электромагнитной доступности сигналов пользователей опорные радионавигационные пункты (ОРНП) приподняты над поверхностью Земли с помощью квадрокоптеров (гектокоптеров). Всю обработку сигналов осуществляют на центральном пункте обработки. Для улучшения отношения сигнал/шум при изменении разности фаз ретранслированных сигналов используют алгоритм вычитания шумов. Дополнительно приведены предложения по оптимизации структуры локальной радионавигационной системы по количеству ОРНП и их размещению на местности. 1 з.п. ф-лы, 4 ил.
1 Способ определения местоположения объекта навигации, заключающийся в излучении объектом навигации в течение заданного интервала времени Δt двух высокочастотных гармонических сигналов S1(t) и S2(t), частоты которых w1 и w2 отличаются на определенную величину Δw1,2=|w1-w2|, приеме сигналов S1(t) и S2(t) в i, i≥3, опорных радионавигационных пунктах с известными координатами, измерении на центральном пункте обработки с известными координатами разности фаз сигналов Δϕij - разностной частоты  , где i, j - номера опорных радионавигационных пунктов, i≥3, i=1, 2, …, j,…, фиксации результатов измерений Δϕij, i≥3, повторном выполнении названных операций с изменением частоты w2 на
, где i, j - номера опорных радионавигационных пунктов, i≥3, i=1, 2, …, j,…, фиксации результатов измерений Δϕij, i≥3, повторном выполнении названных операций с изменением частоты w2 на  второго гармонического сигнала S2(t) таким образом, чтобы новая разностная частота
второго гармонического сигнала S2(t) таким образом, чтобы новая разностная частота  увеличилась на порядок, а длительность излучения нового сигнала
увеличилась на порядок, а длительность излучения нового сигнала  выбирают из условия достаточности для измерения разности фаз сигналов
выбирают из условия достаточности для измерения разности фаз сигналов  разностных частот
разностных частот  и
и  , все зафиксированные величины разностей фаз пересчитывают в координаты объекта навигации с учетом взаимного расположения центрального пункта обработки и опорных радионавигационных пунктов, отличающийся тем, что опорные радионавигационные пункты размещают на квадрокоптерах в точках с заданными координатами и на определенной высоте hi, в функцию которых входит ретрансляция сигналов S1(t) и S2(t) или S1(t) и
, все зафиксированные величины разностей фаз пересчитывают в координаты объекта навигации с учетом взаимного расположения центрального пункта обработки и опорных радионавигационных пунктов, отличающийся тем, что опорные радионавигационные пункты размещают на квадрокоптерах в точках с заданными координатами и на определенной высоте hi, в функцию которых входит ретрансляция сигналов S1(t) и S2(t) или S1(t) и  от объекта навигации на центральный пункт обработки, на котором с помощью направленных антенн осуществляют их прием, формируют из попарно принятых сигналов S1(t) и S2(t) или S1(t) и
от объекта навигации на центральный пункт обработки, на котором с помощью направленных антенн осуществляют их прием, формируют из попарно принятых сигналов S1(t) и S2(t) или S1(t) и  сигналы разностной частоты
сигналы разностной частоты  , а измерение разности фаз сигналов Δϕij и
, а измерение разности фаз сигналов Δϕij и  на разностных частотах
на разностных частотах  и
и  , полученных от i-го и j-го опорных радионавигационных пунктов, осуществляют путем перемножения разностных сигналов
, полученных от i-го и j-го опорных радионавигационных пунктов, осуществляют путем перемножения разностных сигналов  и
и  , для чего дополнительно определяют среднюю мощность
, для чего дополнительно определяют среднюю мощность  составляющей шума смеси одного из входных радиосигналов
составляющей шума смеси одного из входных радиосигналов  или
или  и вычитают ее из низкочастотной составляющей результирующего сигнала Рс.
и вычитают ее из низкочастотной составляющей результирующего сигнала Рс.
2 Способ по п. 1, отличающийся тем, что на подготовительном этапе на борт каждого квадрокоптера дополнительно устанавливают ретранслятор радиосигналов, модуль радиосвязи и видеокамеру для обзора нижней полусферы, запоминают коэффициенты дисторсии объектива видеокамеры, определяют ориентацию видеокамеры относительно борта квадрокоптера, а в процессе формирования локальной зоны навигации по командам центрального пункта обработки квадрокоптеры направляют в заданные закрепленные на местности опорные точки, созданные для топографической привязки, они зависают на заданной высоте hi над этими точками, осуществляют постоянную коррекцию своего местоположения в пространстве по изображению, получаемому с видеокамеры самостоятельно или под воздействием управляющих сигналов с центрального поста обработки.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ ДЛЯ СИСТЕМ ЛОКАЛЬНОЙ НАВИГАЦИИ | 2015 |
|
RU2588057C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2014 |
|
RU2559813C1 |
| ЛОКАЛЬНАЯ ФАЗОВАЯ РАЗНОСТНО-ДАЛЬНОМЕРНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2604652C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2015 |
|
RU2604871C2 |
| US 8072220 B2, 06.12.2011. | |||

