Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур.
Известна функциональная структура устройства электромагнитного удержания инструментов (см. Захватные устройства и инструменты промышленных роботов Козырев Ю.Г. М. 2011 г., стр. 93-96, рис. 3.36), выключающая два смещенных друг от друга электромагнитных держателя с витками катушки, которые расположены на внутреннем сердечнике(прототип).
Известный прототип имеет технические возможности, которые заключаются в том, что захват и удержание различных ферромагнитных корпусов различных устройств осуществляют посредством электромагнитных держателей с витками катушки, которые расположены на внутреннем сердечнике.
Недостатком известной функциональной структуры является отсутствие технических возможностей ориентировочного приема и последующего удержания различных диагностических и хирургических корпусов.
Техническим результатом предложенного изобретения является усовершенствование известной функциональной структуры устройства электромагнитного удержания инструментов.
Указанный технический результат достигается следующей функциональной структурой.
Функциональная структура выдвижного устройства электромагнитного захвата и удержания диагностических и хирургических корпусов тороидальной хирургической робототехнической системы с выдвижной крышкой включает электромагнит с внешними ферромагнитным корпусом цилиндрической формы и с внутренним ферромагнитным стержнем с витками катушки, которые с одной стороны ферромагнитного корпуса активизируют электромагнитное поле, при этом введен общий корпус электромагнитного захвата с двумя последовательными расположенными круглыми отверстиями и он выполнен из двух половин с возможностью совместного крепления, вдоль которого расположена средняя часть ферромагнитного корпуса с внутренними ферромагнитными стержнями с общими витками катушки, при этом ферромагнитный корпус электромагнита цилиндрической формы с двух сторон выполнен Г-образной формы и выполнен из двух частей, противоположные концы которых выполнены с формированием электромагнитного поля, при этом ферромагнитный стержень также выполнен из двух частей и также Г-образной формы, противоположные концы которых выполнены конической или сферической формы и расположены соосно в первом и во втором отверстии общего корпуса электромагнитного захвата соответственно, в отверстиях которых также соосно расположены электромагнитные концы ферромагнитного корпуса электромагнита, при этом последовательно и ортогонально электромагниту в одной из половин общего корпуса выполнено отверстие, соосно которому внутри другой половины общего корпуса выполнен выступ с резьбой, где зафиксирован осевой стержень ротора привода разворота, который закреплен внутри четвертого элемента выдвижной системы для разворота устройства электромагнитного захвата.
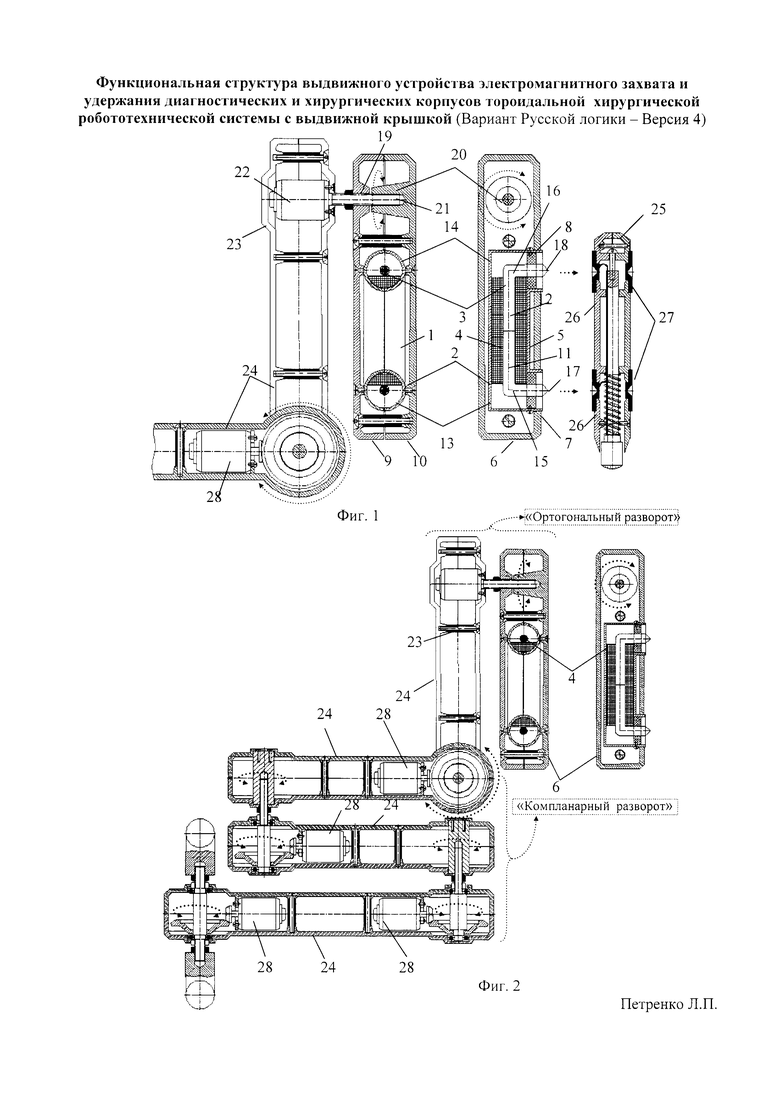
На фиг. 1 изображена функциональная структура в устройства электромагнитного захвата с электромагнитом для фиксации и удержания диагностических и хирургических корпусов. На фиг. 2 изображена функциональная структура выдвижного устройства тороидальной хирургической робототехнической системы с выдвижной крышкой, которая включает три выдвижных элемента с «Компланарным разворотом» и два элемента с «Ортогональным разворотом». На фиг. 3 изображена функциональная структура тороидальной хирургической робототехнической системы с выдвижной крышкой. На фиг. 4 изображено позиционное положение двух устройства электромагнитного захвата в «Зоне выполнения медицинской процедуры». На фиг. 5 изображен напольный вариант функциональной структуры тороидальной хирургической робототехнической системы с выдвижной крышкой.
Функциональная структура выдвижного устройства электромагнитного захвата и удержания диагностических и хирургических корпусов тороидальной хирургической робототехнической системы с выдвижной крышкой включает электромагнит 1 с внешними ферромагнитным корпусом 2 цилиндрической формы и с внутренним ферромагнитным стержнем 3 с витками катушки 4, которые с одной стороны ферромагнитного корпуса 5 (2) активизируют электромагнитное поле. При этом введен общий корпус 6 электромагнитного захвата с двумя последовательными расположенными круглыми отверстиями 7 и 8, и он выполнен из двух половин 9 и 10 с возможностью совместного крепления, вдоль которого расположена средняя часть ферромагнитного корпуса с внутренними ферромагнитными стержнями 11 и 12 с общими витками катушки 4, при этом ферромагнитный корпус электромагнита 1 цилиндрической формы с двух сторон 13 и 14 выполнен Г-образной формы, противоположные концы которых выполнены с формированием электромагнитного поля, при этом ферромагнитный стержень 3 также выполнен из двух частей 15 и 16 и также Г-образной формы, противоположные концы 17 и 18 которых выполнены конической или сферической формы и расположены соосно соответственно в первом 7 и во втором 8 отверстии общего корпуса 6 электромагнитного захвата, в отверстиях 7 и 8 которых также соосно расположены электромагнитные концы 13 и 14 Г-образной формы ферромагнитного корпуса электромагнита 1, при этом последовательно и ортогонально электромагниту 1 в одной из половин 9 общего корпуса 6 выполнено отверстие 19, соосно которому внутри другой половины общего корпуса выполнен выступ 20 с резьбой, где зафиксирован осевой стержень 21 ротора привода разворота 22, который закреплен внутри четвертого элемента 23 выдвижной системы 24 для разворота устройства электромагнитного захвата.
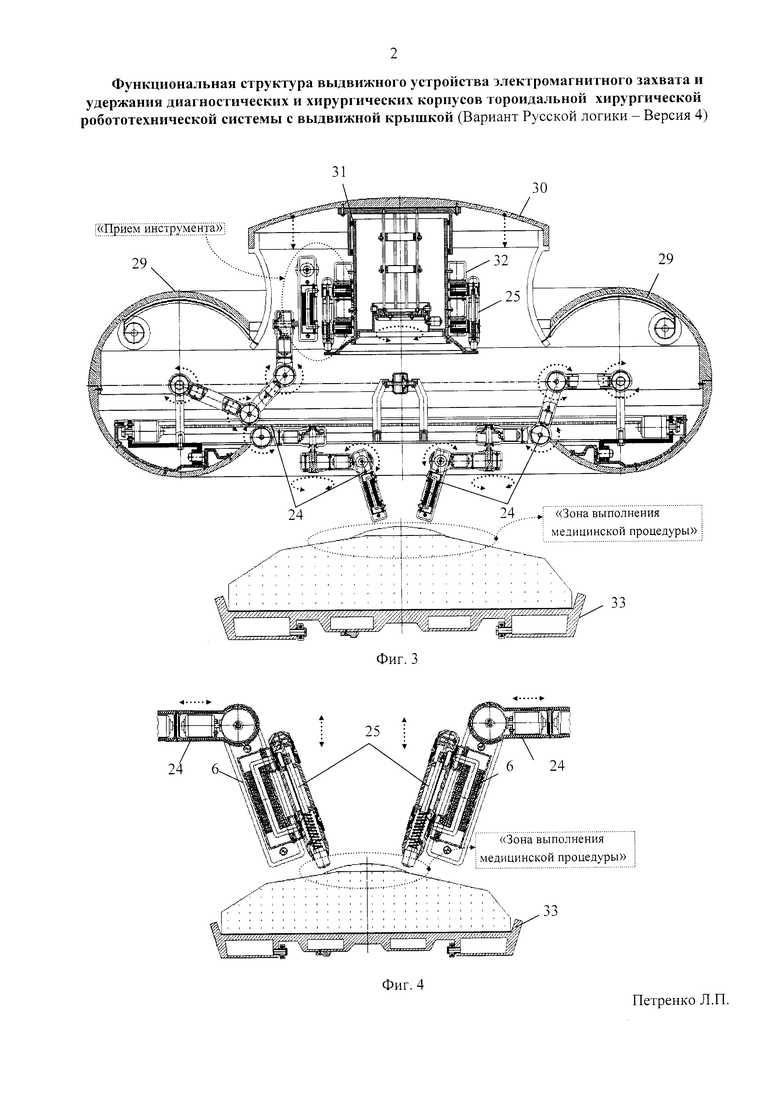
На фиг. 1 также изображен корпус 25 диагностического устройства с ферромагнитными шайбами 26 и 27 с отверстиями конической или сферической формы, которые расположены соосно ферромагнитным стержням с концами 17 и 18 конической или сферической формы для последующей электромагнитной фиксации. На фиг. 2 изображена функциональная структура выдвижного устройства (системы) 24 с приводами разворота 28 тороидальной хирургической робототехнической системы с выдвижной крышкой, которая включает три выдвижных элемента с «Компланарным разворотом» и два элемента с «Ортогональным разворотом». На фиг. 3 изображена функциональная структура тороидальной хирургической робототехнической системы 29 с выдвижной крышкой 30, в нижней части которой зафиксирован инструментальный стол 31 с возможностью осевого разворота и с электромагнитными устройствами удержания 32 корпусов 25 диагностических и хирургических устройств. При этом выдвижная система 24 может быть развернута как в зону «Приема инструмента», так и в «Зону выполнения медицинской процедуры», которая позиционно расположена над подвижной частью медицинского стола 33 (фиг. 4). На фиг. 5 изображен напольный вариант функциональной структуры тороидальной хирургической робототехнической системы 29 с выдвижной крышкой 30, которые посредством двух пар изогнутых стержней 34 и 35 с возможностью возвратно-поступательного смещения расположены на неподвижной части медицинского стола 36, которая зафиксирована на подъемной части 37 опорного корпуса робототехнической системы.
Процедура электромагнитного захвата с электромагнитом 1 фиксации и удержания диагностических и хирургических корпусов заключается в следующем. Поскольку ферромагнитные концы 17 и 18 электромагнита 1 выполнены конической или сферической формы и они соосно расположены соответствующему отверстию конической или сферической формы соответствующей ферромагнитной шайбе 26, то при параллельном смещении общего корпуса 6 электромагнитного захвата в зоне «Приема инструмента» (фиг. 3) осуществляют электромагнитный прием и удержание корпусов 25 диагностических и хирургических устройств, после чего функциональную структуру выдвижного устройства 24 разворачивают в «Зону выполнения медицинской процедуры» (фиг. 4). При этом следует отметить, что выполнение концов 17 и 18 ферромагнитных стержней 15 и 16 электромагнита 1 конической или сферической формы позволяет выполнять ориентированный прием корпусов 25 диагностических и хирургических устройств.
Использование предложенного технического решения позволяет выполнять ориентированный прием и удержание корпусов диагностических и хирургических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой.

Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур. Функциональная структура выдвижного устройства электромагнитного захвата и удержания диагностических и хирургических корпусов тороидальной хирургической робототехнической системы с выдвижной крышкой включает электромагнит с внешними ферромагнитным корпусом цилиндрической формы и с внутренним ферромагнитным стержнем с витками катушки, которые с одной стороны ферромагнитного корпуса активизируют электромагнитное поле, при этом введен общий корпус электромагнитного захвата с двумя последовательными расположенными круглыми отверстиями и он выполнен из двух половин с возможностью совместного крепления, вдоль которого расположена средняя часть ферромагнитного корпуса с внутренними ферромагнитными стержнями с общими витками катушки, при этом ферромагнитный корпус электромагнита цилиндрической формы с двух сторон выполнен Г-образной формы и выполнен из двух частей, противоположные концы которых выполнены с формированием электромагнитного поля, при этом ферромагнитный стержень также выполнен из двух частей и также Г-образной формы, противоположные концы которых выполнены конической или сферической формы и расположены соосно в первом и во втором отверстии общего корпуса электромагнитного захвата соответственно, в отверстиях которых также соосно расположены электромагнитные концы ферромагнитного корпуса электромагнита, при этом последовательно и ортогонально электромагниту в одной из половин общего корпуса выполнено отверстие, соосно которому внутри другой половины общего корпуса выполнен выступ с резьбой, где зафиксирован осевой стержень ротора привода разворота, который закреплен внутри четвертого элемента выдвижной системы для разворота устройства электромагнитного захвата. 5 ил.
Функциональная структура выдвижного устройства электромагнитного захвата и удержания диагностических и хирургических корпусов тороидальной хирургической робототехнической системы с выдвижной крышкой, включающая электромагнит с внешними ферромагнитным корпусом цилиндрической формы и с внутренним ферромагнитным стержнем с витками катушки, которые с одной стороны ферромагнитного корпуса активизируют электромагнитное поле, отличающаяся тем, что введен общий корпус электромагнитного захвата с двумя последовательными расположенными круглыми отверстиями и он выполнен из двух половин с возможностью совместного крепления, вдоль которого расположена средняя часть ферромагнитного корпуса с внутренними ферромагнитными стержнями с общими витками катушки, при этом ферромагнитный корпус электромагнита цилиндрической формы с двух сторон выполнен Г-образной формы и выполнен из двух частей, противоположные концы которых выполнены с формированием электромагнитного поля, при этом ферромагнитный стержень также выполнен из двух частей и также Г-образной формы, противоположные концы которых выполнены конической или сферической формы и расположены соосно в первом и во втором отверстии общего корпуса электромагнитного захвата соответственно, в отверстиях которых также соосно расположены электромагнитные концы ферромагнитного корпуса электромагнита, при этом последовательно и ортогонально электромагниту в одной из половин общего корпуса выполнено отверстие, соосно которому внутри другой половины общего корпуса выполнен выступ с резьбой, где зафиксирован осевой стержень ротора привода разворота, который закреплен внутри четвертого элемента выдвижной системы для разворота устройства электромагнитного захвата.
| Способ получения альфа-оксиантрахинонсульфоновых кислот | 1947 |
|
SU72484A1 |
| Способ борьбы с искажениями телеграфных сигналов | 1946 |
|
SU72485A1 |
| Метод распознавания окисляющих углеводороды бактерий при геомикробиологической разведке нефтяных и газовых месторождений | 1947 |
|
SU72498A1 |
| JP 2010206495 A, 16.09.2010 | |||
| US 4872657 A, 10.10.1989 | |||
| Устройство для стереотаксических операций | 1985 |
|
SU1306572A1 |

