Изобретение относится к гидроакустическим сигнальным устройствам, и может быть использовано для обнаружения движущегося подводного морского объекта в условиях воздействия импульсных помех биологического и техногенного происхождения в прибрежных районах мелководных акваторий.
Известно, что главная трудность обнаружения подводного объекта активными средствами обнаружения в мелководной акватории заключается в необходимости выделения малоразмерной цели с небольшим радиусом эквивалентной сферы на фоне донной и поверхностной реверберации.
Площадь прибрежной зоны, ограниченная глубинами, где использование активных гидролокационных средств неэффективно, может составлять до 50% от общей площади охраняемой акватории. Поэтому прибрежная мелководная область, прилегающая к особо важным охраняемым объектам, остается не освещенной, а значит доступной для свободного действия в ней подводных террористических морских объектов. (Помехоустойчивость гидроакустических систем при использовании адаптивной обработки сигналов: монография / под. ред. B.C. Колмогорова. - Владивосток: ТОВВМУ им. С.О. Макарова, 2015. - 196 с.)
Известно устройство обнаружения движущегося морского объекта в прибрежной зоне мелководной акватории (Патент №68733 Российская Федерация, МПК G08B3/00, G08B31/00. Устройство обнаружения движущегося морского объекта / Калашников И.И., Колмогоров B.C., Сенченко А.Г., Юрченко Е.Н.; патентообладатель Тихоокеанский военно-морской институт имени СО. Макарова (г. Владивосток). Заявл. 11.07.2007; опубл. 27.11.2007 бюл. №33).
Устройство содержит блок излучения в составе последовательно соединенного генератора высоких частот и излучающего антенного устройства, блок обработки сигналов, в состав которого входит два приемных канала, каждый из которых содержит последовательно соединенное приемное антенное устройство и согласующее устройство, а также вычитающее устройство и адаптивный фильтр.
Известное устройство вырабатывает сигнал тревоги при появлении движущегося морского объекта в охраняемом водном пространстве. При этом амплитуда принимаемого сигнала за счет постоянного искажения интерференционной картины движущимся морским объектом приобретает флуктуирующий характер, в сравнении с первоначальной стационарной интерференционной картиной, когда в охраняемой зоне отсутствовал движущийся морской объект.
Недостатками описанного аналога являются:
- при работе устройства в водную среду излучается высокочастотный сигнал одной частоты, а волнение морской поверхности во времени изменяется, поэтому для когерентного отражения высокочастотного сигнала от морской поверхности и образования устойчивой интерференционной картины необходимо изменять частоту излучаемого акустического сигнала в зависимости от волнения моря, что в устройстве не предусмотрено (формирование интерференционной картины является обязательным условием функционирования интерференционного обнаружителя).
- устройство не защищено от воздействия импульсных помех, созданных как работающими активными гидролокационными станциями охраны водного района, так и от импульсных помех, создающих морскими животными и ракообразными, обитающими в мелководных акваториях, что характеризует низкую помехоустойчивость устройства.
Известно устройство интерференционный обнаружитель движущегося подводного объекта (Патент №2474881 Российская Федерация, МПК G08B3/10, H04L29/06. Интерференционный обнаружитель движущегося подводного объекта / Колмогоров B.C., Долгих В.Н., Викторов Р.В., Шпак С.А., Плюхин В.В., Ламека А.П.; патентообладатель Открытое акционерное общество «Дальприбор». - №2011134154/08; заявл. 12.08.2011; опубл. 10.02.2013)
Устройство содержит блок излучения, в состав которого входит генератор высоких частот и излучающее антенное устройство, блок обработки сигнала, в состав которого входит канал перестройки частоты, содержащий приемное антенное устройство, согласующее устройство, блок фильтров и блок расчета и сравнения функции когерентности, и два аналогичных приемных канала, каждый из которых содержит приемное антенное устройство, блок фильтров и согласующее устройство, а также вычитающее устройство и адаптивный фильтр. Кроме того, устройство содержит амплитудный детектор, регистрирующее устройство и блок отображения информации.
Устройство вырабатывает сигнал тревоги при появлении морского объекта в охраняемой зоне водного пространства, и в регистрируемом сигнале появляется составляющая с переменной, флуктуирующей амплитудой. Полученный в вычитающем устройстве разностный амплитудный сигнал поступает на вход амплитудного детектора для выделения амплитудной огибающей сигнала с переменной амплитудой.
Недостатками описанного устройства является то, что:
- при работе устройства прием регистрируемого сигнала с переменной флюктуирующей амплитудой осуществляется только двумя приемными антенными устройствами, с произвольным, не определенным местом установки относительно друг друга;
- устройство не защищено от воздействия импульсных помех, созданных как работающими активными гидролокационными станциями охраны водного района, так и от импульсных помех, создающих морскими животными и ракообразными, обитающими в мелководных акваториях, что характеризует низкую помехоустойчивость устройства.
Известно устройство интерференционный обнаружитель движущегося морского объекта, выбранное в качестве прототипа (Патент №2572052 Российская Федерация, МПК G08B 3/00. Интерференционный обнаружитель движущегося морского объекта / Колмогоров B.C., Викторов Р.В., Шпак С.А.; патентообладатель Шпак С.А. Заявл.25.03.2014.; опубл. 20.09.2015; бюл. №26)
Прототип содержит последовательно соединенные генератор и излучающее антенное устройство, с возможностью передачи излученного сигнала на вход блока обработки сигналов. В него входит канал перестройки частоты, включающий последовательно соединенное приемное антенное устройство, согласующее устройство и блок фильтров, а также аналогичный первый, второй и дополнительно введенный N-ый приемный канал, включающие соответствующие последовательно соединенные приемные антенные устройства, соответствующие блоки фильтров и согласующие устройства. Канал перестройки частоты содержит блок расчета и сравнения функции когерентности.
Принципиальным отличием прототипа от вышеизложенных устройств является то, что устройство дополнительно содержит блок расчета функций взаимной корреляции и принятия решения, а блок обработки сигналов дополнительно содержит N-oe количество приемных каналов, аналогично соответствующих первому и второму приемному каналу блока обработки сигналов, включающих последовательно соединенное N-oe приемное антенное устройство, N-ый блок фильтров, N-oe согласующее устройство.
Недостатком описанных устройств, включая прототип, является то, что они не защищены от воздействия импульсных помех, созданных как работающими активными гидролокационными средствами охраны водного района, так и от импульсных помех, создаваемых морскими животными и ракообразными, обитающими в мелководных акваториях, что характеризует их низкую помехоустойчивость.
На устранение этого недостатка направлено заявленное изобретение, технической задачей которого является создание нового гидроакустического устройства для обнаружения движущегося подводного морского объекта в условиях мелководья с учетом изменяющегося волнения моря и наличия импульсных помех как биологического, так и техногенного происхождения.
Реализация поставленной технической задачи позволяет добиться следующего технического результата:
- повышается помехоустойчивость при обнаружении движущегося подводного морского объекта путем подавления импульсных гидроакустических помех.
Для достижения указанного технического результата предложен «Интерференционный обнаружитель движущегося подводного морского объекта с медианной фильтрацией сигнала», который содержит последовательно соединенные генератор и излучающее антенное устройство, с возможностью передачи излученного сигнала на вход блока обработки сигналов.
В блок обработки сигналов входит канал перестройки частоты, включающий последовательно соединенное приемное антенное устройство, блок фильтров, согласующее устройство и блок расчета и сравнения функции когерентности, а также аналогичные первый, второй и N-й приемные каналы, включающие соответствующие последовательно соединенные приемные антенные устройства, блоки фильтров, согласующие устройства, при этом блок расчета и сравнения функции когерентности канала перестройки частоты блока обработки сигналов параллельно соединен с входом первого, второго и N-го блока фильтров, соответствующих первого, второго и N-го приемных каналов. А также адаптивный фильтр, выход которого соединен через амплитудный детектор с входом регистрирующего устройства, выход которого соединен с входом блока отображения информации. А также блок расчета функции взаимной корреляции и принятия решения, при этом выход первого согласующего устройства первого приемного канала блока обработки сигналов параллельно соединен с первым входом адаптивного фильтра и с первым входом блока расчета функции взаимной корреляции и принятия решения, выход второго согласующего устройства второго премного канала параллельно соединен со вторым входом блока расчета функций взаимной корреляции и принятия решения, выход N-ого согласующего устройства N-го приемного канала параллельно соединен с N-ым входом блока расчета функций взаимной корреляции и принятия решения, выход которого соединен со вторым входом адаптивного фильтра.
Принципиальным отличием заявленного изобретения от прототипа является то, что в канал перестройки частоты, первый, второй и N-й приемные каналы блока обработки сигналов дополнительно введены идентичные медианные фильтры, входы которых соединены с выходами соответствующих приемных антенных устройств, а выходы соединены с входами соответствующих блоков фильтров.
Сущность изобретения поясняется чертежами:
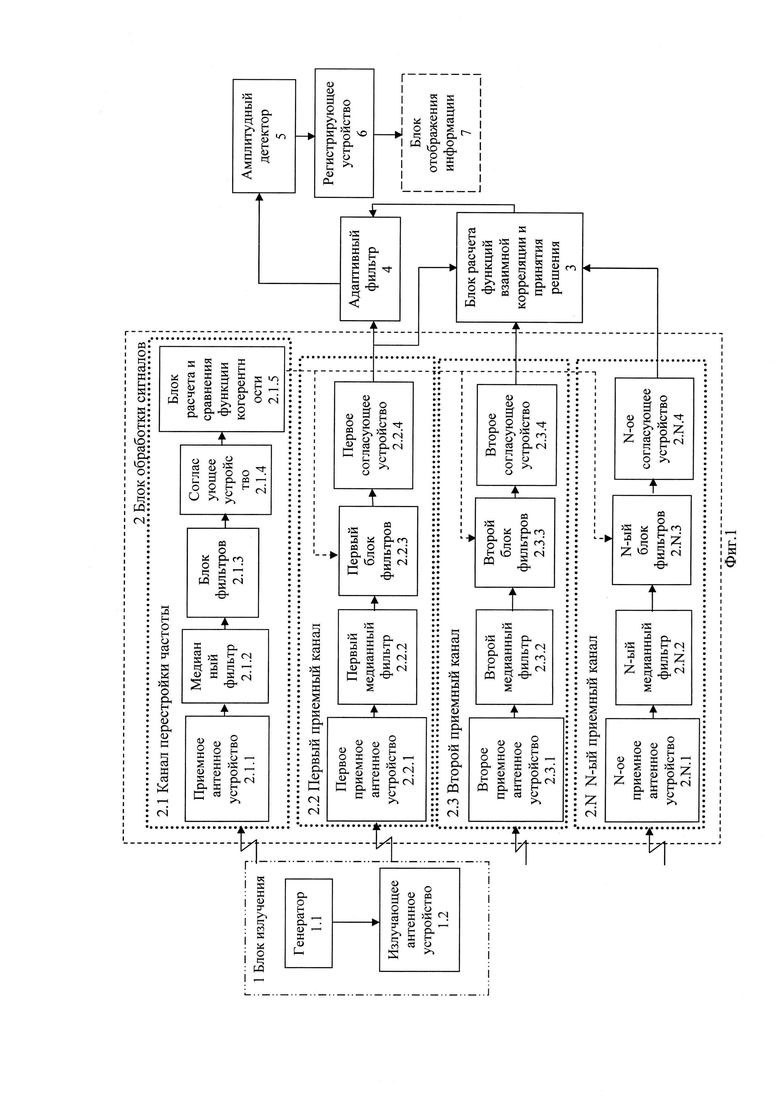
Фиг. 1. - Интерференционный обнаружитель движущегося подводного морского объекта с медианной фильтрацией сигнала. Функциональная схема.
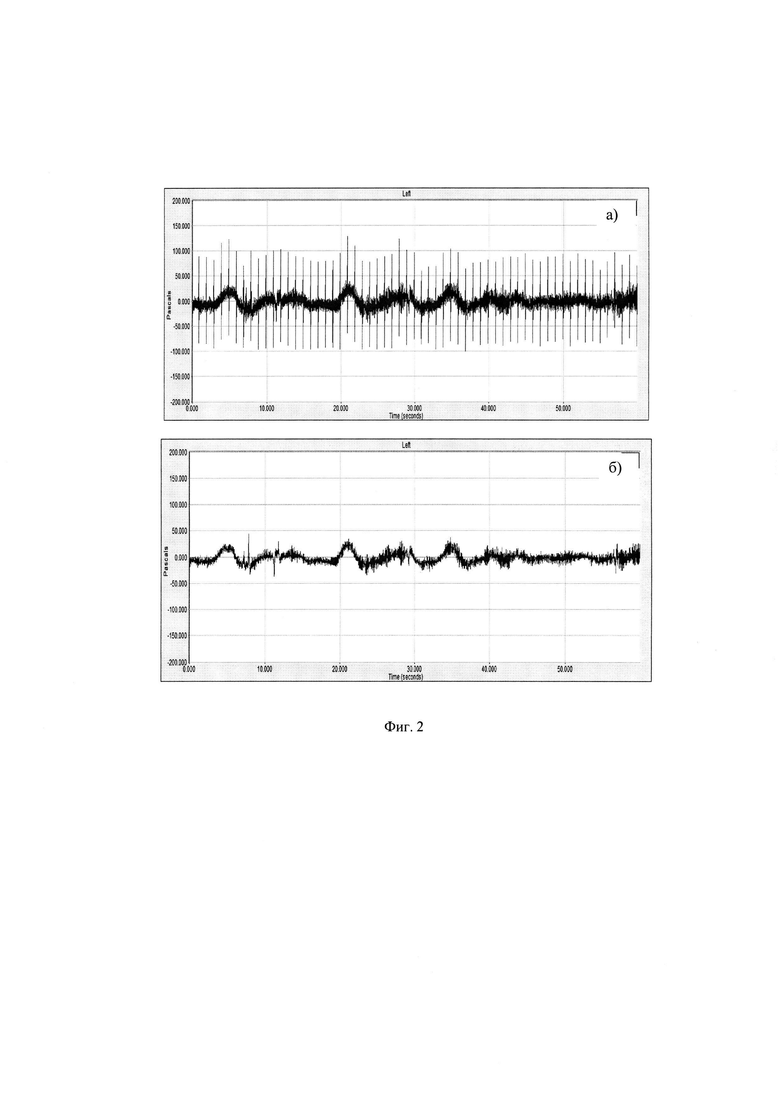
Фиг. 2. - Временная реализация сигнала с излучением импульсов:
а) без медианной фильтрации;
б) с медианной фильтрацией.
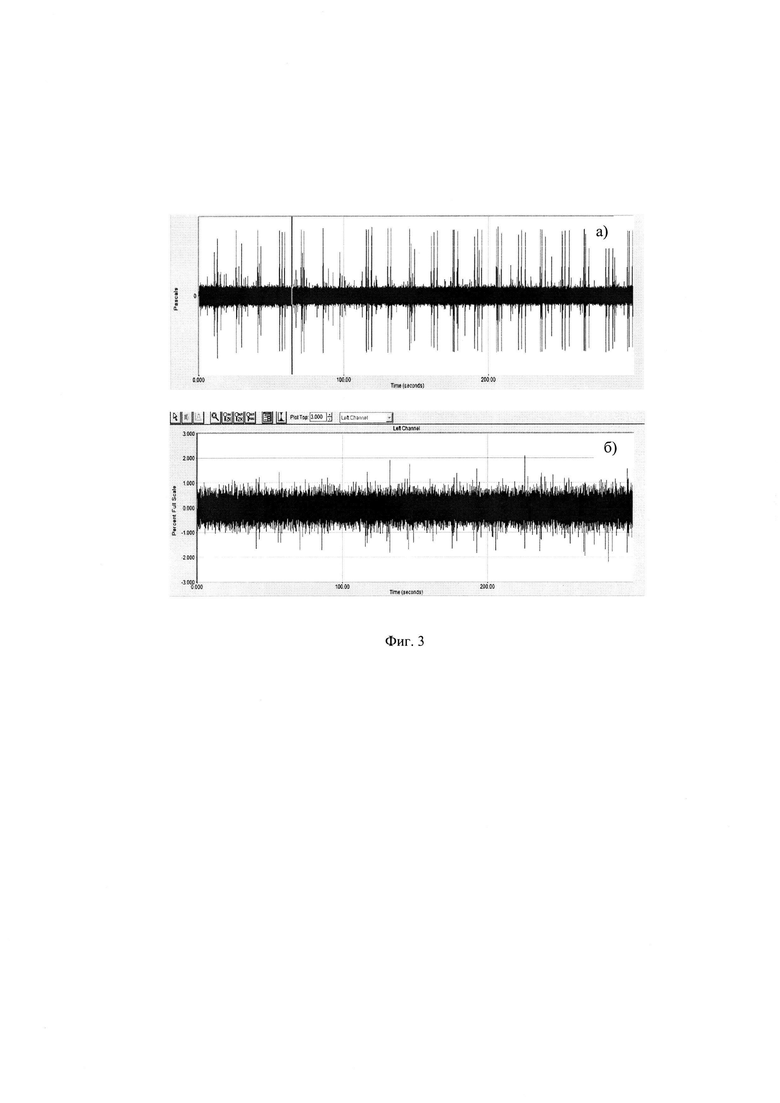
Фиг. 3. - Временное представление записи сигнала работы системы гидроакустической навигационной системы автономного необитаемого подводного аппарата:
а) без медианной фильтрации;
б) с медианной фильтрацией.
На фиг. 1 представлено:
1 Блок излучения
1.1 Генератор
1.2 Излучающее антенное устройство
2 Блок обработки сигналов
2.1 Канал перестройки частоты
2.1.1 Приемное антенное устройство (гидрофон)
2.1.2. Медианный фильтр
2.1.3 Блок фильтров
2.1.4 Согласующее устройство
2.1.5 Блок расчета и сравнения функции когерентности
2.2 Первый приемный канал
2.2.1 Первое приемное антенное устройство
2.2.2 Первый медианный фильтр
2.2.3 Первый блок фильтров
2.2.4 Первое согласующее устройство
2.3 Второй приемный канал
2.3.1 Второе приемное антенное устройство
2.3.2 Второй медианный фильтр
2.3.3 Второй блок фильтров
2.3.4 Второе согласующее устройство
2.N N-ый приемный канал
2.N. 1 N-oe приемное антенное устройство
2. N.2 N-й медианный фильтр
2.N.3 N-ый блок фильтров
2.N.4 N-oe согласующее устройство
3 Блок расчета функций взаимной корреляции и принятия решения
4 Адаптивный фильтр
5 Амплитудный детектор
6 Регистрирующее устройство
7 Блок отображения информации
Все конструктивные элементы в блоке излучения 1, в блоке обработки сигналов 2, а так же амплитудный детектор 5, регистрирующее устройство 6 и блок отображения информации 7 соединены электрическими связями. Блок излучения 1 соединен с блоком обработки сигналов 2 посредством акустической связи через водную среду. В качестве устройства, формирующего сигналы, использован цифровой генератор 1.1, генерирующий мультитональные сигналы, которые поступают на излучающее антенное устройство 1.2. В качестве излучающего антенного устройства 1.2 использован излучающий электроакустический элемент с возможностью передачи акустических сигналов в водную среду. В блоке обработки сигналов 2 сформированы канал перестройки частоты 2.1 и N идентичных приемных каналов 2.2, 23…2.N.
В блоке обработки сигналов 2 выход каждого приемного антенного устройства 2.1.1, 2.2.1, 2.3.1 и 2.N.1 соответственно последовательно соединен с входом соответствующих медианных фильтров 2.1.2, 2.2.2, 2.3.2 и 2.N.2, выходы которых соединены с входами соответствующих блоков фильтров 2.1.3, 2.2.3, 2.3.3 и 2.N.3, выходы которых соединены с входами соответствующих согласующих устройств 2.1.4, 2.2.4, 2.3.4 и 2.N.4, для формирования пары идентичных приемных каналов 2.2, 2.3…2.N; выход согласующего устройства 2.1.4 канала перестройки частоты 2.1 соединен с входом блока расчета и сравнения функции когерентности 2.1.5, выход которого параллельно соединен с блоками фильтров 2.2.3, 2.3.3 и 2.3.N первого, второго и N-го приемных каналов.
Выход первого согласующего устройства 2.2.4 первого приемного канала 2.2 блока обработки сигналов 2 параллельно соединен с первым входом адаптивного фильтра 4 и с первым входом блока расчета функций взаимной корреляции и принятия решения 3, выход второго согласующего устройства 2.3.4 параллельно соединен со вторым входом блока расчета функции взаимной корреляции и принятия решения 3, выход N-ого согласующего устройства 2.N.4 параллельно соединен с N-ым входом блока расчета функции взаимной корреляции и принятия решения 3.
В блоке расчета функций взаимной корреляции и принятие решения 3 принимается решение о выборе второго (опорного) канала для подачи сигнала на адаптивный фильтр 4 от приемных каналов 2.3…2.N на основе расчета максимального значения коэффициента взаимной корреляции между парой приемных каналов (2.2 и 2.3…2.N); с выхода адаптивного фильтра 4 очищенный от коррелированной флюктуационной помехи сигнал поступает на вход амплитудного детектора 5.
Выход амплитудного детектора 5 соединен с входом регистрирующего устройства 6. Регистрирующее устройство 6 использовано с возможностью визуального отображения обработанного сигнала. Кроме того, выход регистрирующего устройства 6 соединен с входом блока отображения информации 7 для документирования данных.
Данные экспериментальных исследований
Для проверки возможности подавления импульсной помехи во временной области с использованием медианного фильтра были проведены экспериментальные исследования, как в глубоком, так и мелком море.
На фиг. 2 показана временная реализация сигнала, полученная на измерительной базе, установленной с обеспечивающего судна, с излучением последовательности импульсов длительностью 20 мс и записи сигналов от работы активной гидролокационной системы.
На фиг. 2а наблюдаются, помимо шумового сигнала, импульсы в виде периодических выбросов большого уровня длительностью 20 мс от работы активной системы. Эта временная реализация сигнала, полученная на измерительной базе (приемном гидрофоне), была обработана с использованием медианного фильтра длиной N=960 при частоте дискретизации 96 кГц и длительности импульса 20 мс.
Из анализа фиг. 2 видно, что медианный фильтр исключил импульсы от работы активной гидролокационной системы, что существенно повышает помехоустойчивость средств обнаружения морских объектов.
Аналогичная картина наблюдается при медианной фильтрации сигнала от работы гидроакустической навигационной системы (ГАНС) автономного необитаемого подводного аппарата (АНПА) в мелководной акватории.
На фиг. 3 представлена временная реализация без медианной фильтрации и с медианной фильтрацией сигнала, принимаемая на гидрофон, установленный в мелководной акватории.
На фиг. 3б представлено временное представление результатов обработки сигналов гидроакустической навигационной системы АНПА с помощью медианной фильтрации.
Как видно из фиг. 3 медианная фильтрация позволяет подавить сигналы ГАНС АНПА, которые являются в данном случае импульсными помехами для работы интерференционного обнаружителя.
Эксперименты показали, что если не производить медианную фильтрацию сигнала во временной области, то при приеме импульсов гидрофонами интерференционного обнаружителя, возникает помеха во всем частотном диапазоне измерения и селекция полезного сигнала в частотной области будет весьма затруднена.
Таким образом, как видно из анализа фиг. 2 и фиг. 3, использование медианной фильтрации позволяет значительно подавить помеховые импульсные сигналы как в глубоком море, имеющие строгую периодичность импульсных сигналов, так и импульсные сигналы в мелком море, к примеру, от работы системы ГАНС АНПА, имеющие случайный характер.
В мелком море наблюдается случайная последовательность помеховых импульсов, связанная с отражениями излученных импульсов от поверхности и дна моря и случайных импульсных помех биологического и индустриального характера. Несмотря на это использование медианной фильтрации показало свою эффективность.
Устройство работает следующим образом
Для функционирования устройство снабжено общепринятым переносным или стационарным источником питания, расположенным на плавучем морском носителе или стационарно совместно с блоком излучения. При работе генератор 1.1, с помощью излучающего антенного устройства 1.2, в качестве которого использован электроакустический элемент, широко используемый в гидроакустике, излучает в водную среду исследуемого района многочастотные сигналы.
Морская среда в отсутствии морского объекта характеризуется «опорной» передаточной характеристикой.
Сигнал, проходя через морскую среду охраняемого водного пространства с «опорной» передаточной характеристикой, регистрируется каналом перестройки частоты 2.1 через последовательно соединенное приемное антенное устройство 2.1.1, медианный фильтр 2.1.2, согласующее устройство 2.1.3, блок фильтров 2.1.4, и блок расчета и сравнения функции когерентности 2.1.5. В результате многократного отражения сигнала от взволнованной поверхности моря и дна сигнал, выбранный для излучения с использованием блока расчета и сравнения функции когерентности 2.1.5 облучает все пространство исследуемой области.
Регистрируемая «опорная» передаточная характеристика морской среды необходима для выработки в блоке расчета и сравнения функции когерентности управляющего электрического сигнала заданной частоты для настройки первого блока фильтров 2.2.3, второго блока фильтров 2.3.3 и N-ого блока фильтров 2.N.3 на оптимальную частоту приема.
Этот же сигнал с учетом «опорной» передаточной характеристики охраняемого водного пространства принимается первым приемным каналом 2.2, вторым приемным каналом 2.3 и N-ым приемным каналом 2.N, включающими соответствующие последовательно соединенные приемные антенные устройства 2.2.1, 2.3.1, 2.N.1, соответствующие медианные фильтры 2.2.2, 2.3.2, 2N.2, соответствующие блоки фильтров 2.2.3, 2.3.3, 2.N.3, соответствующие согласующие устройства 2.2.4, 2.3.4, 2.N.4, настроенные на оптимальную частоту приема, которая будет необходима для выработки сигнала в адаптивном фильтре 4.
При появлении движущегося подводного морского объекта в пространстве охраняемой зоны, первым приемным каналом 2.2 через последовательно соединенное первое приемное антенное устройство 2.2.1, первый медианный фильтр 2.2.2, первый блок фильтров 2.2.3, и первое согласующее устройство 2.2.4, настроенным на оптимальную частоту приема, формируется «рабочая» передаточная характеристика пространства морской среды, отличная от «опорной» передаточной характеристики, в котором может предположительно находиться обнаруживаемый объект.
При наличии импульсных помех медианные фильтры 2.1.2, 2.2.2,2.3.2 и 2.N.2 подавляют помеховые импульсы, повышая тем самым помехоустойчивость устройства.
Преобразованный, за счет искажения интерференционной картины в морской акватории при появлении в охраняемой зоне подводного морского объекта, сигнал принимается вторым приемным каналом 2.3 и N-ым приемным каналом в составе блока обработки сигналов 2. Принятый преобразованный сигнал поступает на соответствующие входы блока расчета функций взаимной корреляции и принятия решения 3, где на основе нахождения максимального значения коэффициента взаимной корреляции принимается решение на подключение соответствующего приемного канала с выхода последнего на вход адаптивного фильтра 4. С выхода адаптивного фильтра 4 сигнал поступает на соответствующий вход амплитудного детектора 5. В случае превышения величины флуктуаций амплитуды сигнала над выработанным порогом амплитуды нормированного сигнала на экране регистрирующего устройства 6 наблюдается отметка от биологического, техногенного, морского или пресноводного объекта и принимается решение об обнаружении сигнала о наличии морского объекта в охранной зоне.
При изменении волнения моря исследуемого района в блоке расчета и сравнения функции когерентности 2.1.5 блока обработки сигналов 2 вырабатывается новый управляющий электрический сигнал другой оптимальной частоты, который поступает на вход соответствующих первого блока фильтров 2.2.3, второго блока фильтров 2.3.3 и N-ого блока фильтров 2.N.3 для настройки на эту оптимальную частоту приема соответствующих приемных каналов 2.2, 2.3 и 2.N.
При появлении движущегося подводного морского объекта в охраняемой зоне, в преобразованном сигнале в точке расположения приемного устройства (гидрофона) уровень сигнала начинает флюктуировать за счет периодической деформации интерференционной картины в охраняемой области пространства.
На адаптивный фильтр 4 поступает сигнал с первого приемного канала 2.2, где имеются флюктуации как за счет отражений от взволнованной поверхности моря, так и за счет искажения интерференционной картины при движении подводного морского объекта в интерференционной охраняемой зоне морской акватории. С другой стороны, на адаптивный фильтр 4 поступает сигнал с N-го приемного канала 2 N, где имеются флюктуации только за счет отражений от взволнованной поверхности моря. Выбор N-го приемного канала осуществляется с использованием блока расчета функций взаимной корреляции и принятия решения 3.
Разностный сигнал между первым и N-м приемными каналами и очищенный адаптивным фильтром 4 от флюктуационных помех, вызванных отражением от взволнованной поверхности, с адаптивного фильтра 4 поступает на вход амплитудного детектора 5 для выделения амплитудной огибающей только сигнала, вызванного флюктуациями интерференционного поля при движении морского объекта. В продетектированном сигнале появляются амплитудно-частотные составляющие, присущие только флюктуациям за счет искажения интерференционной картины при движении морского объекта в интерференционной охраняемой зоне морской акватории. После этого продетектированный сигнал поступает на вход регистрирующего устройства 6 для регистрации и документирования, полученных в результате исследования данных. Визуальное наблюдение принятого акустического сигнала происходит в блоке отображения информации 7, где происходит принятие решения о нахождении в исследуемой области движущегося подводного морского объекта.
Заявленное изобретение представляет значительный интерес для народного хозяйства, так как обеспечивает охрану биологических и техногенных морских и пресноводных объектов. Заявленное решение не оказывает отрицательного воздействия на экологическое состояние окружающей среды.
Таким образом, заявленное изобретение «Интерференционный обнаружитель движущегося подводного морского объекта с медианной фильтрацией сигнала» является новым гидроакустическим охранным устройством для обеспечения защиты кораблей и судов в гаванях и портах, а также портовых и других подводных сооружений.
Заявленное устройство обладает следующим достоинством:
- создано новое гидроакустическое устройство для обнаружения движущегося подводного морского объекта, способное использоваться в комплексе с активными гидроакустическими средствами охраны водного района.
Заявленное устройство промышленно применимо, так как для его реализации используются широко распространенные компоненты и изделия радиотехнической промышленности и вычислительной техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоэлементный интерференционный обнаружитель движущегося подводного объекта | 2024 |
|
RU2837998C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ ОБНАРУЖИТЕЛЬ ДВИЖУЩЕГОСЯ МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2563140C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ ОБНАРУЖИТЕЛЬ ДВИЖУЩЕГОСЯ ПОДВОДНОГО ОБЪЕКТА | 2011 |
|
RU2474881C1 |
| Способ регистрации проходной характеристики морского объекта в мелководной акватории | 2022 |
|
RU2786039C1 |
| Обнаружитель движущихся подводных объектов на фоне биологического шума мелководной акватории, где обитают раки-щелкуны | 2021 |
|
RU2779380C1 |
| Способ регистрации проходной характеристики морского объекта | 2021 |
|
RU2774731C1 |
| Способ регистрации малошумного морского объекта с использованием медианной фильтрации | 2016 |
|
RU2616357C1 |
| СПОСОБ РЕГИСТРАЦИИ МАЛОШУМНОГО МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2572052C2 |
| Способ регистрации уровня шумоизлучения морского объекта | 2017 |
|
RU2659186C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
Изобретение относится к гидроакустическим сигнальным устройствам и может быть использовано для обнаружения движущегося подводного морского объекта. Техническим результатом изобретения является повышение помехоустойчивости при обнаружении движущегося подводного морского объекта путем подавления импульсных гидроакустических помех. Для достижения указанного технического результата интерференционный обнаружитель движущегося подводного морского объекта дополнительно содержит медианные фильтры. Медианные фильтры введены в канал перестройки частоты, первый, второй и N-й приемные каналы блока обработки сигналов, при этом входы фильтров соединены с выходами соответствующих приемных антенных устройств, а выходы соединены с входами соответствующих блоков фильтров. 3 ил.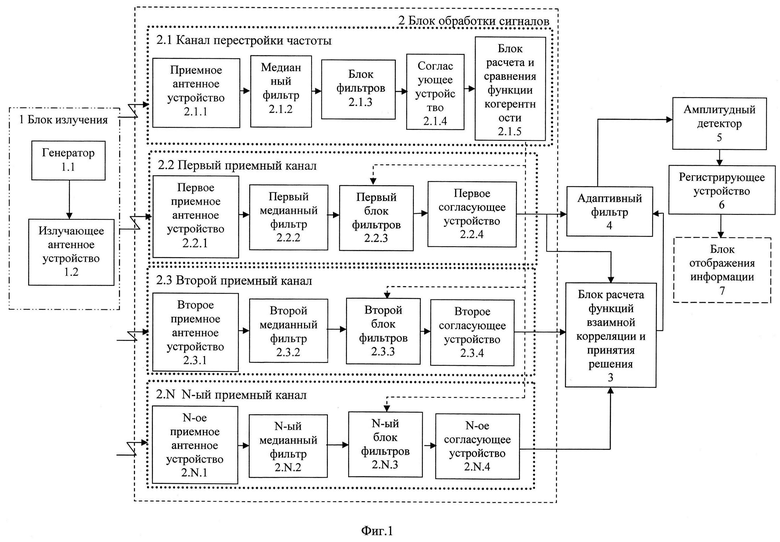
Интерференционный обнаружитель движущегося подводного морского объекта с медианной фильтрацией сигнала, содержащий последовательно соединенные генератор и излучающее антенное устройство, с возможностью передачи излученного сигнала на вход блока обработки сигналов, в который входит канал перестройки частоты, включающий последовательно соединенное приемное антенное устройство, блок фильтров, согласующее устройство и блок расчета и сравнения функции когерентности, а также аналогичные первый, второй и N-й приемные каналы, включающие соответствующие последовательно соединенные приемные антенные устройства, блоки фильтров, согласующие устройства, при этом блок расчета и сравнения функции когерентности канала перестройки частоты блока обработки сигналов параллельно соединен с входом первого, второго и N-го блока фильтров, соответствующих первого, второго и N-го приемных каналов; а также адаптивный фильтр, выход которого соединен через амплитудный детектор с входом регистрирующего устройства, выход которого соединен с входом блока отображения информации; а также блок расчета функции взаимной корреляции и принятия решения, при этом выход первого согласующего устройства первого приемного канала блока обработки сигналов параллельно соединен с первым входом адаптивного фильтра и с первым входом блока расчета функции взаимной корреляции и принятия решения, выход второго согласующего устройства второго премного канала параллельно соединен со вторым входом блока расчета функций взаимной корреляции и принятия решения, выход N-ого согласующего устройства N-го приемного канала параллельно соединен с N-ым входом блока расчета функций взаимной корреляции и принятия решения, выход которого соединен со вторым входом адаптивного фильтра, отличающийся тем, что в канал перестройки частоты, первый, второй, N-й приемные каналы блока обработки сигналов дополнительно введены идентичные медианные фильтры, входы которых соединены с выходами соответствующих приемных антенных устройств, а выходы соединены с входами соответствующих блоков фильтров.
| ИНТЕРФЕРЕНЦИОННЫЙ ОБНАРУЖИТЕЛЬ ДВИЖУЩЕГОСЯ МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2563140C1 |
| Способ регистрации проходной характеристики морского объекта | 2021 |
|
RU2774731C1 |
| Способ регистрации малошумного морского объекта с использованием медианной фильтрации | 2016 |
|
RU2616357C1 |
| НАВИГАЦИОННАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2001 |
|
RU2225991C2 |
| US 10725149 B1, 28.07.2020 | |||
| CN 102305944 B, 14.08.2013. | |||
