ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к системе управления для транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] В качестве системы управления для транспортного средства, сконфигурированной, чтобы выполнять какую-либо определенную операцию, когда датчик, установленный в кузове транспортного средства, обнаруживает пользователя или т.п., известна конструкция, описанная в Патентном документе 1.
[0003] В этом традиционном примере в качестве датчика использован контактный датчик, который прикреплен к самой задней стойке кузова транспортного средства. Когда пользователь помещает руку над контактным датчиком и затем двигает рукой вверх-вниз, контактный датчик обнаруживает движение руки. Контроллер принимает сигнал обнаружения и приводит в движение заднюю дверь в вертикальном направлении.
[0004] Однако в этом традиционном примере для управления задней дверью требуется, чтобы пользователь поместил руку поверх контактного датчика. Поэтому, если обе руки заняты вещами или т.п., пользователь должен на время отложить вещи для выполнения операции. Таким образом, в традиционном примере имеется недостаток, заключающийся в том, что не всегда обеспечено удобство использования.
[0005] Кроме того, в традиционном примере утверждается, что в качестве датчика может использоваться оптический датчик, ультразвуковой датчик, датчик распознавания изображений, тепловой датчик и т.п. Тем не менее, даже при использовании любого из этих датчиков трудно отличить случай, когда к транспортному средству приближается пользователь, от случая, когда к транспортному средству приближаются человек, животное и т.п., иные, чем пользователь. Следовательно, невозможно предотвратить непреднамеренное открывание и закрывание двери. Это создает проблему низкой эксплуатационной надежности.
ДОКУМЕНТ УРОВНЯ ТЕХНИКИ
ПАТЕНТНЫЙ ДОКУМЕНТ
[0006] Патентный документ 1: опубликованная заявка на выдачу патента Японии №2005-307692.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ЗАДАЧИ, РЕШАЕМЫЕ ИЗОБРЕТЕНИЕМ
[0007] Настоящее изобретение предназначено для того, чтобы преодолеть вышеописанные недостатки. Задача настоящего изобретения состоит в том, чтобы предложить систему управления для транспортного средства, способную надежно реагировать на намеренное действие пользователя вне транспортного средства.
СРЕДСТВА РЕШЕНИЯ ЗАДАЧИ
[0008] Настоящее изобретение достигает решения вышеупомянутой задачи путем предложения системы управления для транспортного средства, в которой контроллер 6 управляет определенным объектом 7 управления, когда датчик 5 обнаруживает попадание целевого объекта 4 в полое углубление 1, сформированное во внешней стенке транспортного средства. В системе управления для транспортного средства датчик 5 представляет собой рефлекторный оптический датчик 5, сконфигурированный так, чтобы испускать зондирующий луч 3 из светоизлучающего отверстия 2, предусмотренного в одной из поверхностей стенки полого углубления 1, в направлении к поверхности другой стенки полого углубления 1 и чтобы обнаруживать попадание целевого объекта 4 в полое углубление 1, когда интенсивность принимаемых лучей из объема отраженных зондирующих лучей 3 превышает заданное пороговое значение измерения.
[0009] Транспортное средство включает в себя:
рефлекторный оптический датчик 5, сконфигурированный так, чтобы обнаруживать попадание целевого объекта 4 в полое углубление 1, сформированное во внешней стенке транспортного средства, когда интенсивность принимаемых лучей из объема отраженных зондирующих лучей 3, выпущенных из светоизлучающего отверстия 2, предусмотренного в одной из поверхностей стенки полого углубления 1, в направлении поверхности другой стенки полого углубления 1, превышает заданное пороговое значение измерения; и
контроллер 6, сконфигурированный так, чтобы управлять определенным объектом 7 управления при обнаружении рефлекторным оптическим датчиком 5 попадания целевого объекта 4 в полое углубление 1. Рефлекторный оптический датчик 5 принимает в своем светопринимающем участке 5а вышеуказанные зондирующие лучи 3, выпущенные в полое углубление 1 из светоизлучающего отверстия 2, предусмотренного в одной из поверхностей стенки полого углубления 1, сформированного во внешней стенке транспортного средства, и обнаруживает попадание целевого объекта 4 в полое углубление 1, когда количество таким образом принятых лучей (интенсивность принимаемого пучка) превышает заданное пороговое значение измерения. В качестве рефлекторного оптического датчика 5 может использоваться рефлекторный датчик инфракрасных лучей. Светоизлучающее отверстие 2 рефлекторного оптического датчика 5 может быть обращено к внешней панели транспортного средства или ручке управления, декоративному элементу или т.п., прикрепленному к внешней панели.
[0010] Полое углубление 1 может быть участком, краевая линия которого представлена в законченном виде во внешней стенке транспортного средства подобно углубленному участку ручки для удерживания ручки двери рукой или в ином случае может представлять собой углубленный участок, имеющий краевую линию, конечные точки которой никогда не соединяются друг с другом. В качестве альтернативного варианта полое углубление 1 может представлять собой не только различимую узкую область, но также и всю область, поверхность стенок которой углублена по направлению вовнутрь транспортного средства от плоскости, соединяющей краевые линии.
[0011] В качестве объекта 7 управления контроллера 6 могут быть намечены такие объекты, как приводы системы освещения и электронное устройство идентификации, в дополнение к источникам управления для привода блокировки и разблокировки, электрического привода двери и т.п.
[0012] В настоящем изобретении, в котором попадание целевого объекта 4 в полое углубление 1 определяется, чтобы затем привести в действие определенный объект 7 управления, заранее заданную операцию можно выполнить, просто вставив руку, какой-либо предмет или т.п.в полое углубление 1. Соответственно, удобство возрастает.
[0013] Кроме того, поскольку в качестве датчика используется рефлекторный оптический датчик 5, это избавляет от необходимости дополнительного обеспечения, в отличие от случая с передающим оптическим датчиком, светопринимающего отверстия на стороне, противоположной светоизлучающему отверстию 2. Соответственно, для транспортных средств, предположительно используемых на открытом воздухе, может быть уменьшена вероятность закрытия светопринимающих и светоизлучающих отверстий из-за пыли или т.п. и повышена эксплуатационная надежность.
[0014] Кроме того, рефлекторный оптический датчик 5 испускает луч по направлению к поверхности стенки полого углубления 1, точнее, поверхность стенки полого углубления 1 не является поверхностью стенки, в которой предусмотрено светоизлучающее отверстие 2. Соответственно, если человек, животное, мусор и т.п., отличные от пользователя, приближаются к транспортному средству, рефлекторный оптический датчик 5 не выдает сигнал обнаружения или количество света является довольно малым по сравнению с пороговым значением измерения. Это позволяет предотвратить непреднамеренное срабатывание, вызываемое приближением животного или т.п. к транспортному средству.
[0015] Не каждый зондирующий луч 3 должен достичь поверхности стенки полого углубления 1. В качестве точки на оптической оси, как в случае использования однолучевого источника излучения, необходимо лишь, чтобы область максимальной интенсивности света или окружающая ее область были расположены на поверхности стенки полого углубления 1.
[0016] В этом случае, если управляющая конструкция для транспортного средства выполнена таким образом, чтобы оптическая ось рефлекторного оптического датчика 5 была направлена к внутренней стороне транспортного средства, это позволяет уменьшить количество лучей, испускаемых за пределы полого углубления 1, чтобы дополнительно увеличить точность обнаружения.
[0017] Кроме того, направление, в котором открывается светоизлучающее отверстие 2, может быть вертикальным, горизонтальным, диагональным или т.п. или может быть определено в зависимости от ситуации. Тем не менее, если управляющая конструкция для транспортного средства выполнена таким образом, что рефлекторный оптический датчик 5 установлен в положение со светоизлучающим отверстием 2, направленным вниз, это уменьшает вероятность контакта с дождевой водой, пылью или т.п. со светоизлучающим отверстием 2. Соответственно, светоизлучающее отверстие 2 редко закрыто.
[0018] Как описано выше, в качестве объекта 7 управления контроллера 6 могут быть намечены такие объекты, как приводы блокировки и разблокировки. Тем не менее, в случае, если объект 7 управления представляет собой контроллер операций открытия и закрытия двери транспортного средства, это позволяет управлять операцией открытия и закрытия двери, просто вставляя руку в углубленный участок для удерживания ручки двери рукой или т.п. Контроллер операций открытия и закрытия, сконфигурированный, чтобы управлять операциями открытия и закрытия задней двери с электрическим приводом, в частности, требует, чтобы пользователь, руки которого заняты вещами, просто вставил одну из этих вещей в полое углубление 1 для выполнения операций открытия и закрытия. Это позволяет повысить технологичность для погрузки и выгрузки вещей.
[0019] Контроллер операций открытия и закрытия может быть выполнен с возможностью управления в дополнение к операциям открытия и закрытия двери с электрическим приводом, операциями блокировки и разблокировки двери или операциями подготовки к операциям открытия и закрытия, такими как подача сигнала запроса электронному ключу, принадлежащему пользователю, перед блокировкой и разблокировкой.
[0020] Кроме того, управляющая конструкция для транспортного средства может быть выполнена таким образом, чтобы пороговое значение измерения для целевого объекта 4, используемое в рефлекторном оптическом датчике 5, определялось в соответствии с интенсивностью лучей, попадающих на светопринимающий участок 5a в течение заданного времени перед определением.
[0021] Рефлекторный оптический датчик 5 сконфигурирован, чтобы обнаруживать целевой объект 4 в соответствии с увеличением количества отраженных лучей светопринимающим участком 5a, когда целевой объект 4 входит в полое углубление 1. Обнаружение осуществляется путем сравнения интенсивности лучей, принимаемых светопринимающим участком 5a, с пороговым значением измерения. Тем не менее, даже если модели транспортного средства являются одинаковыми, поверхности стенок полых углублений 1 транспортных средств выполнены из материалов, имеющих различные свойства отражения во многих случаях. Например, транспортные средства могут быть окрашены в различные цвета. Следовательно, интенсивности лучей, принимаемых светопринимающими участками 5a, отличаются в начальном состоянии, перед тем как целевой объект 4 будет введен в полое углубление 1.
[0022] Кроме того, в отличие от средств, используемых внутри помещений, транспортное средство имеет в начальном состоянии различные интенсивности лучей, принимаемых светопринимающим участком 5a, что зависит от яркости освещения при остановке или на стоянке, количества грязи на светоизлучающем отверстии 2 или на отражающей поверхности, количества снега, накопившегося на поверхности стенки, и т.п. Вследствие чего эти факторы служат факторами снижения точности обнаружения.
[0023] Тем не менее, в настоящем изобретении, в котором пороговое значение измерения для целевого объекта 4, используемое в рефлекторном оптическом датчике 5, определяется согласно интенсивности лучей, принимаемых светопринимающим участком 5a в течение определенного времени перед определением, пороговое значение измерения корректируется до значения, подходящего для среды использования. Соответственно, повышается точность обнаружения.
[0024] Пороговое значение измерения может быть определено как среднее значение, максимальное значение, промежуточное значение и т.п., полученное путем применения соответствующей статистической обработки значений интенсивности лучей, принимаемых светопринимающим участком 5а в пределах определенного времени до операции обнаружения целевого объекта 4. Кроме того, операция обнаружения может быть также выполнена по мере статистического определения существенной разницы между начальным состоянием и операцией обнаружения, например, путем статистического анализа среднего значения в начальном состоянии и среднего значения во время операции обнаружения.
ТЕХНИЧЕСКИЙ РЕЗУЛЬТАТ
[0025] Настоящее изобретение позволяет предотвратить подачу управляющего сигнала в результате приближения кого-либо или чего-либо, отличного от пользователя, к транспортному средству. Это позволяет надежно реагировать на намеренное действие пользователя вне транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
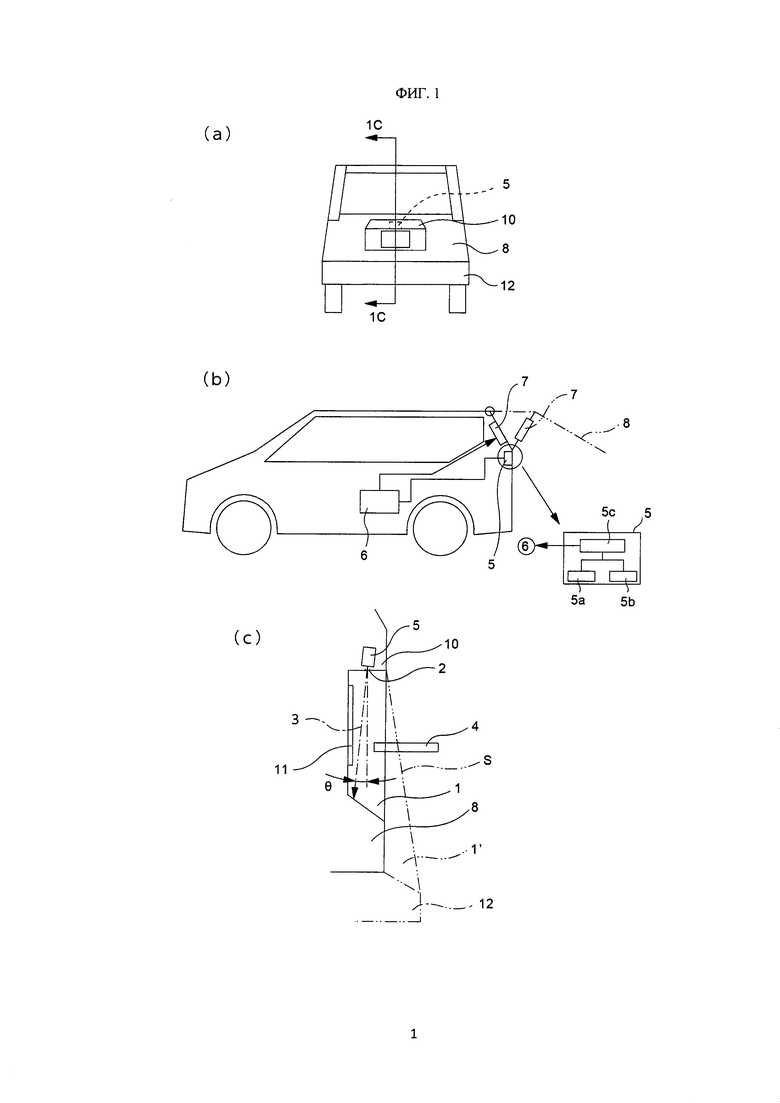
[0026] На Фиг. 1 представлены виды транспортного средства для иллюстрации настоящего изобретения: (a) вид транспортного средства сзади, (b) вид сбоку и (c) вид в поперечном разрезе вдоль линии 1C-1C с (a).
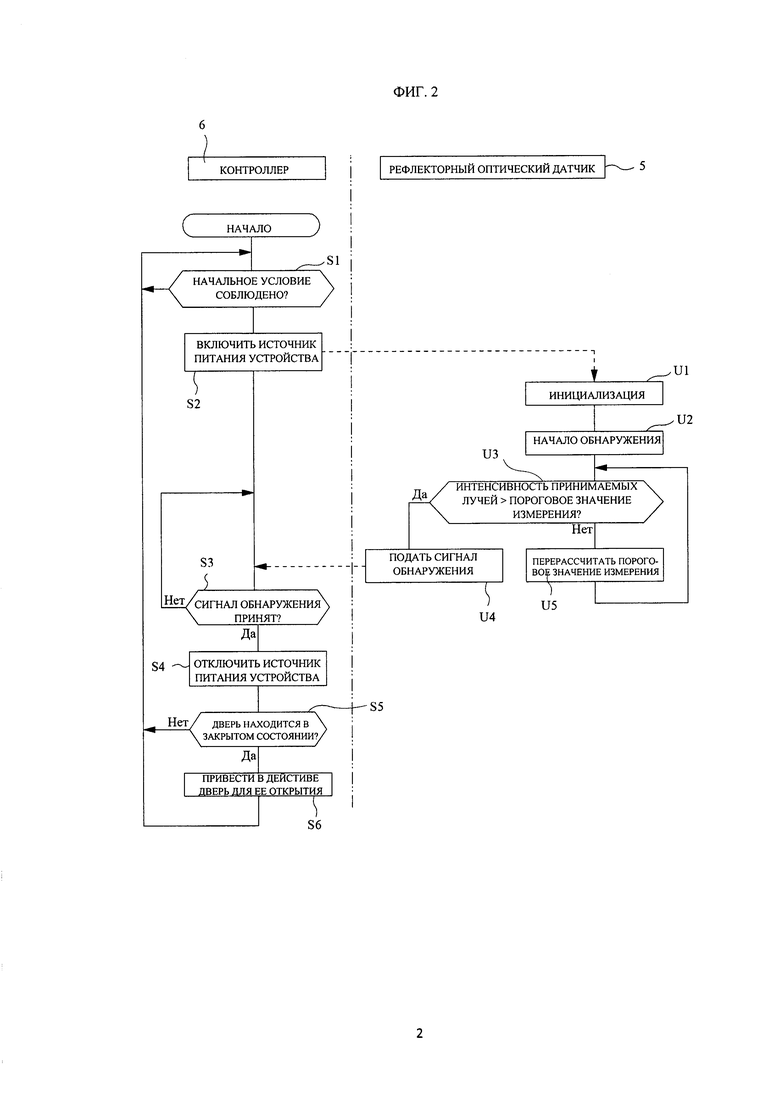
На Фиг. 2 представлена блок-схема для иллюстрации работы контроллера.
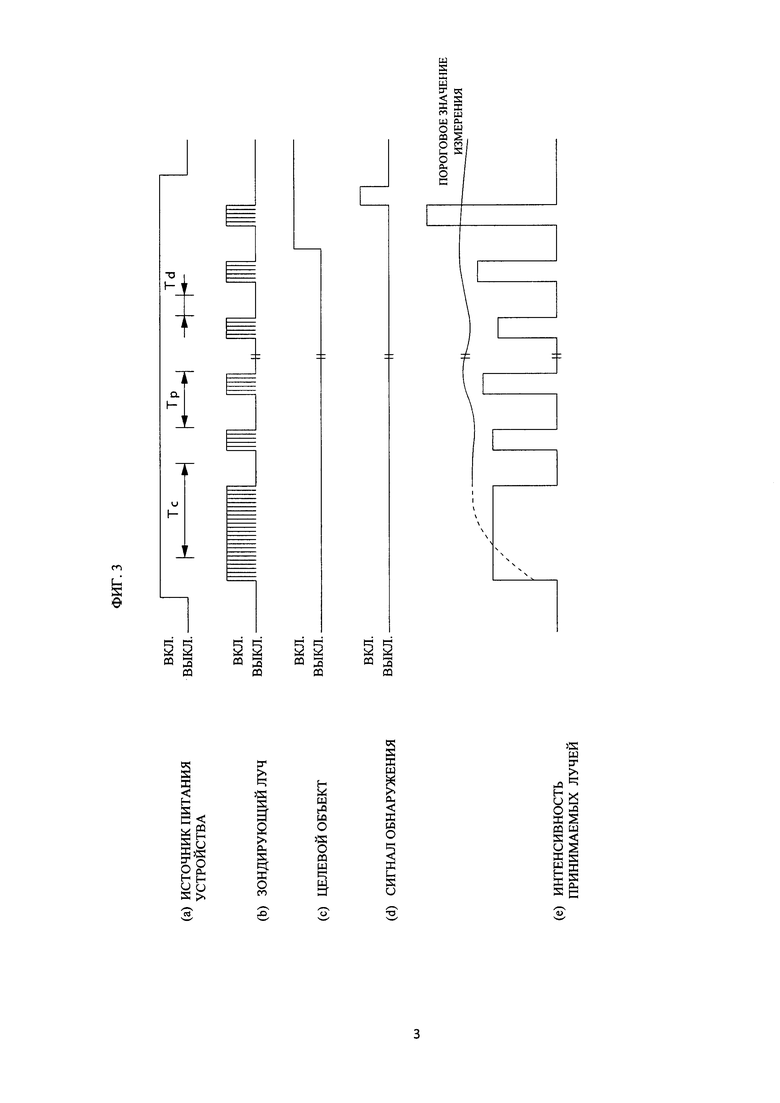
На Фиг. 3 представлена временная диаграмма рефлекторного оптического датчика.
СПОСОБ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0027] На Фиг. 1 представлено транспортное средство, в котором применено настоящее изобретение. В этом варианте осуществления транспортное средство включает в себя заднюю дверь 8, выполненную с возможностью закрытия проема, предусмотренного в задней части кузова автомобиля. Задняя дверь 8 выполнена как так называемая задняя дверь с электрическим приводом, сконфигурированная, чтобы приводиться в действие для открытия и закрытия посредством соответствующего привода (объекта 7 управления), такого как газовый демпфер. Для управления открытием и закрытием задней двери 8 задняя дверь 8 оснащена рефлекторным оптическим датчиком 5, при этом контроллер 6, выполненный с возможностью управления приводом 7, предусмотрен внутри транспортного средства. Контроллер 6 может быть встроен в бортовой компьютер, установленный в транспортном средстве.
[0028] На задней двери 8 сформировано углубление для прикрепления номерного знака, окруженное накладкой 10 для номерного знака, а номерной знак 11 закреплен в углублении для прикрепления номерного знака.
[0029] Рефлекторный оптический датчик 5 представляет собой так называемый рефлекторный оптический датчик инфракрасных лучей 5 и сконфигурирован, чтобы обнаруживать наличие или отсутствие определенного целевого объекта 4 согласно количеству отраженных инфракрасных лучей (интенсивности принимаемого пучка), излучаемых в качестве зондирующих лучей 3 из целевого объекта 4. Рефлекторный оптический датчик 5 выполнен как одно устройство, включающее в себя: соответствующее количество светоизлучающих частей 5b, сконфигурированных, чтобы излучать зондирующие лучи 3; светопринимающий участок 5a, сконфигурированный, чтобы принимать отраженные целевым объектом 4 пучки зондирующих лучей 3, зондирующий луч 3, излучаемый из светоизлучающих частей 5b; и участок 5с управления датчиком, сконфигурированный, чтобы регулировать временной интервал излучения зондирующего луча 3, регулировать пороговое значение, сравнивать пороговое значение с количеством лучей, принимаемых таким образом (с интенсивностью принимаемого пучка), и выполнять другие операции. Активацией и прекращением работы рефлекторного оптического датчика 5 управляет вышеописанный контроллер 6. Когда интенсивность принимаемых лучей превышает пороговое значение, рефлекторный оптический датчик 5 выдает сигнал обнаружения.
[0030] Вышеописанное углубление для прикрепления номерного знака является полым углублением 1. Для обнаружения попадания целевого объекта 4 в полое углубление 1 рефлекторный оптический датчик 5 встроен в потолочный участок стенки полого углубления 1, точнее, в накладку 10 для номерного знака так, чтобы излучать зондирующий луч 3 из потолочного участка стены по направлению к донному участку стенки полого углубления 1.
[0031] Для излучения зондирующего луча 3 из рефлекторного оптического датчика 5 в полое углубление 1 в потолочной поверхности стенки полого углубления 1 предусмотрено светоизлучающее отверстие 2.
[0032] Кроме того, для предотвращения попадания зондирующего луча 3 за пределы полого углубления 1 рефлекторный оптический датчик 5 расположен таким способом, чтобы оптическая ось рефлекторного оптического датчика 5 была смещена по направлению к внутреннему объему транспортного средства под соответствующим углом (θ) относительно вертикального направления, как показано на Фиг. 1(c).
[0033] Следует отметить, что выше приведено описание случая, когда углубление для прикрепления номерного знака спроектировано как углубление для обнаружения попадания целевого объекта 4, т.е. полое углубление 1. Тем не менее, в отличие от этого, например, как показано на Фиг. 1(c), область, смещенная к плоскости (S), соединяющей верхний край углубления для прикрепления номерного знака, служащего верхней краевой линией, с верхним краем заднего бампера 12, может быть спроектирована как полое углубление 1′, а рефлекторный оптический датчик 5 может быть расположен таким образом, чтобы попадание целевого объекта 4 в полое углубление 1′ могло быть обнаружено.
[0034] Опишем операцию открытия и закрытия задней двери с электрическим приводом транспортного средства, сконфигурированного, как описано выше.
[0035] Как показано на Фиг. 2, в начале управления контроллер 6, во-первых, определяет, соответствуют ли текущие условия режиму управления операциями для задней двери с электрическим приводом 8 (этап S1). Соответствуют ли условия режиму управления операциями, может быть соответствующим образом определено в установленных требованиях. Например, могут быть установлены условия: если рычаг переключения передач находится в парковочном положении; если дверь находится в незаблокированном состоянии; или если обнаружено наличие неиллюстрированного электронного ключа в определенной области от транспортного средства; в частности, например, ответный сигнал успешно принят от электронного ключа в пределах определенного периода времени после подачи сигнала запроса электронному ключу.
[0036] Если начальные условия на этапе S1 соблюдены, контроллер 6 активирует рефлекторный оптический датчик 5 (этап S2) и ждет, пока сигнал обнаружения от рефлекторного оптического датчика 5 не будет принят (этап S3).
[0037] Для уменьшения влияния внешнего мешающего света рефлекторный оптический датчик 5 сконфигурирован, чтобы излучать зондирующий луч 3 в виде световых импульсов и определять интенсивность лучей, принимаемых светопринимающим участком 5а, в соответствии с периодом времени этого импульсного излучения. Когда на этапе S2 рефлекторный оптический датчик 5 активирован, он сначала излучает соответствующее количество импульсов зондирующего луча 3 в пределах заранее определенного времени выверки (Тc), как показано на Фиг. 3, для выполнения процесса инициализации (этап U1).
[0038] Процесс инициализации необходим, чтобы выверить пороговое значение измерения для целевого объекта 4 согласно среде использования или условию использования, таким как изменение количества излучаемых лучей из-за грязи на светоизлучающем отверстии 2, изменение количества отраженных лучей из-за состояния отражающей поверхности, таких как цвет и грязь, или изменение количества внешнего света из-за изменения яркости окружающего света, путем определения интенсивности принимаемых лучей, отраженных от донной части стенки полого углубления 1. В процессе инициализации не выполняется никаких операций обнаружения целевого 4 объекта, в отличие от операции обнаружения, которая будет описана далее.
[0039] В настоящем варианте осуществления пороговое значение измерения рассчитывают путем сложения заранее заданного постоянного порогового значения измерения со средним значением интенсивности лучей, принимаемых светопринимающим участком 5a в пределах времени выверки (Тc).
[0040] После окончания процесса инициализации, как описано выше, начинается операция обнаружения (этап U2). Операция обнаружения выполняется таким образом, чтобы импульсы зондирующего луча 3 испускались через определенные интервалы (Тp) в течение определенного времени (Td). Если интенсивность лучей, принимаемых светопринимающим участком 5a, превышает пороговое значение измерения, определенное в вышеописанной последовательности действий (этап U3), сигнал обнаружения подается на контроллер 6 (этап U4).
[0041] С другой стороны, если интенсивность принимаемых лучей не превышает пороговое значение измерения на этапе U3, то пороговое значение измерения, используемое на этапе U3, перерассчитывают (этап U5) для следующей операции обнаружения. Перерасчет может быть выполнен посредством той же процедуры, которая применяется для установки порогового значения измерения при инициализации. Например, пороговое значение измерения может быть рассчитано посредством умножения уже используемого порогового значения измерения на количество импульсов, используемых на этапе U3 в качестве весового параметра, посредством вычисления среднего значения полученного произведения и суммы интенсивностей принимаемых лучей на этапе U3, посредством вычисления значения на один импульс путем деления среднего значения и прибавления постоянной порогового значения к полученному значению на один импульс.
[0042] Если контроллер 6 принимает произведенный сигнал обнаружения на этапе U4 (этап S3), то источник энергии рефлекторного оптического датчика 5 отключается (этап S4). Затем определяется, находится ли дверь в закрытом состоянии (этап S5). Если дверь находится в закрытом состоянии, выдается управляющий сигнал приводу 7, чтобы привести в действие привод 7 с целью открытия задней двери 8 (этап S6).
ОБЪЯСНЕНИЕ ССЫЛОЧНЫХ ПОЗИЦИЙ
[0043] 1 ПОЛОЕ УГЛУБЛЕНИЕ
2 СВЕТОИЗЛУЧАЮЩЕЕ ОТВЕРСТИЕ
3 СВЕТ ОБНАРУЖЕНИЯ
4 ЦЕЛЕВОЙ ОБЪЕКТ
5 РЕФЛЕКТОРНЫЙ ОПТИЧЕСКИЙ ДАТЧИК
6 КОНТРОЛЛЕР
7 ОБЪЕКТ УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ДЛЯ ИСПОЛЬЗОВАНИЯ С АВТОМАТИЧЕСКОЙ ДВЕРЬЮ | 2011 |
|
RU2551835C2 |
| ДАТЧИК МУТНОСТИ | 2009 |
|
RU2477345C2 |
| ФОТОЧУВСТВИТЕЛЬНОЕ УСТРОЙСТВО | 2013 |
|
RU2601536C1 |
| УСТРОЙСТВО ОСВЕЩЕНИЯ ДЛЯ ОТСЕКА ДЛЯ ХРАНЕНИЯ ВЕЩЕЙ В ТРАНСПОРТНОМ СРЕДСТВЕ И СПОСОБ ДЛЯ УПРАВЛЕНИЯ УСТРОЙСТВОМ ОСВЕЩЕНИЯ ДЛЯ САЛОНА ТРАНСТПОРТНОГО СРЕДСТВА | 2016 |
|
RU2720027C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО, СИСТЕМА ВЫЯВЛЕНИЯ ОБЪЕКТОВ В УГЛУБЛЕНИИ ДЛЯ НОГ И СПОСОБ ДЛЯ ВЫЯВЛЕНИЯ ОБЪЕКТОВ В УГЛУБЛЕНИИ ДЛЯ НОГ | 2016 |
|
RU2701294C2 |
| ОСВЕТИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С МНОГОЗОННЫМ УПРАВЛЕНИЕМ НА ОСНОВЕ ПРИБЛИЖЕНИЯ | 2015 |
|
RU2682103C2 |
| СИСТЕМЫ И СПОСОБЫ ИНДЕНТИФИКАЦИИ И УПРАВЛЕНИЯ ОБЪЕКТАМИ | 2006 |
|
RU2374673C2 |
| КАТУШКА ДЛЯ ПРОВОЛОКИ | 2013 |
|
RU2550458C2 |
| КАТУШКА ДЛЯ ПРОВОЛОКИ, МАШИНА ДЛЯ ОБВЯЗКИ АРМАТУРЫ И СПОСОБ ОПРЕДЕЛЕНИЯ ИНФОРМАЦИИ О ВРАЩЕНИИ | 2015 |
|
RU2597840C1 |
| КАТУШКА ДЛЯ ПРОВОЛОКИ, МАШИНА ДЛЯ ОБВЯЗКИ АРМАТУРЫ И СПОСОБ ОПРЕДЕЛЕНИЯ ИНФОРМАЦИИ О ВРАЩЕНИИ | 2009 |
|
RU2498874C2 |
Задачей настоящего изобретения является создание системы управления для транспортного средства, способной надежно реагировать на намеренное действие пользователя вне транспортного средства. Система содержит рефлекторный оптический датчик (5), сконфигурированный, чтобы обнаруживать попадание объекта (4) обнаружения в полое углубление (1), выполненное во внешней стенке транспортного средства, в соответствии с изменением количества отраженных пучков зондирующих лучей (3), излучаемых из светоизлучающего отверстия (2), предусмотренного в поверхности одной из стенок полого углубления (1), по направлению к поверхности другой стенки полого углубления (1), контроллер (6), сконфигурированный, чтобы управлять определенным объектом (7) управления, когда рефлекторный оптический датчик (5) обнаруживает попадание целевого объекта (4) в полое углубление (1). Достигается повышение надежности. 6 з.п. ф-лы, 3 ил. 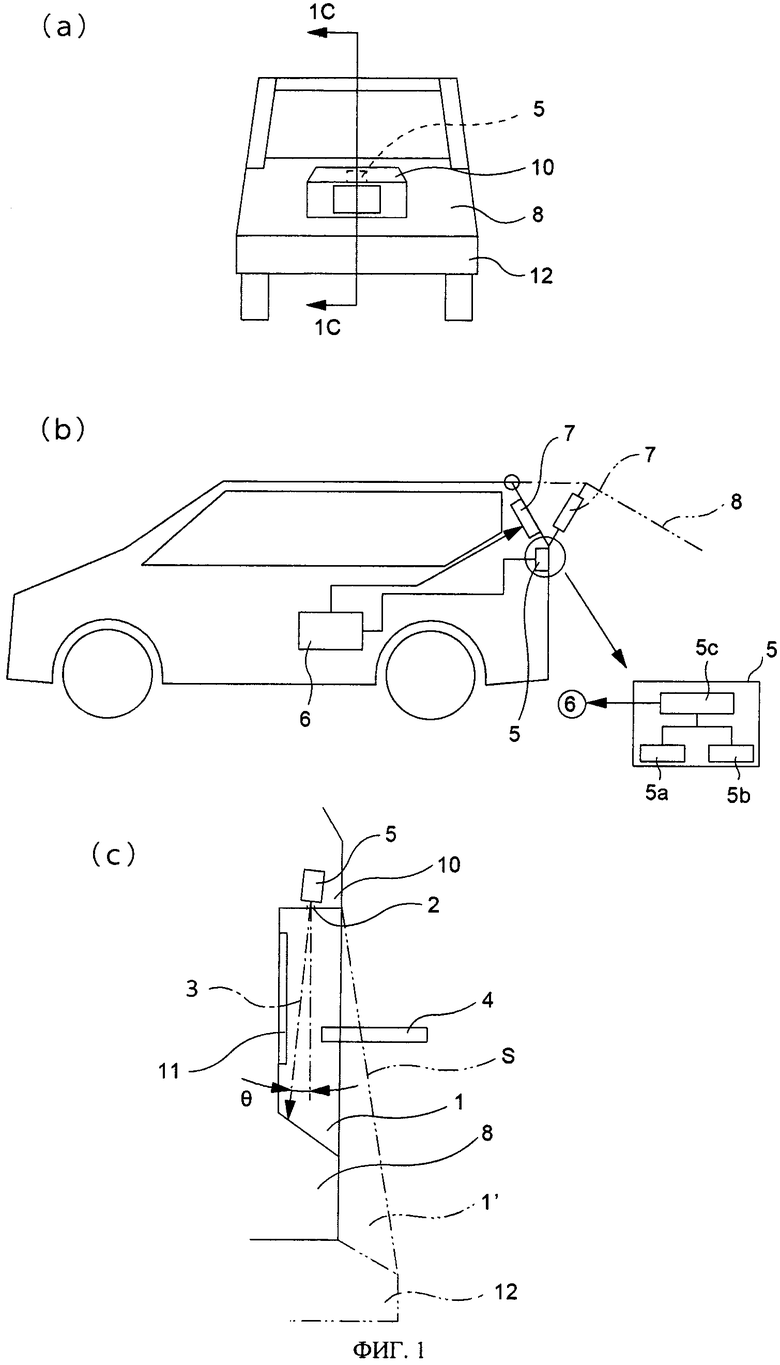
1. Система управления для транспортного средства, в которой контроллер управляет заданным объектом управления, когда датчик обнаруживает попадание целевого объекта в полое углубление, сформированное во внешней стенке транспортного средства, в которой датчик представляет собой рефлекторный оптический датчик, сконфигурированный так, чтобы испускать зондирующий луч из светоизлучающего отверстия, предусмотренного в одной из поверхностей стенки полого углубления, в направлении к поверхности другой стенки полого углубления, и, чтобы обнаруживать попадание целевого объекта в полое углубление, когда интенсивность принимаемых лучей из объема отраженных зондирующих лучей превышает заданное пороговое значение измерения.
2. Система управления для транспортного средства по п. 1, в которой оптическая ось рефлекторного оптического датчика направлена на внутреннюю поверхность транспортного средства.
3. Система управления для транспортного средства по п. 1, в которой рефлекторный оптический датчик установлен в положение со светоизлучающим отверстием, направленным вниз.
4. Система управления для транспортного средства по п. 1, в которой объектом управления является контроллер операций открытия и закрытия двери транспортного средства.
5. Система управления для транспортного средства по п. 1, в которой рефлекторным оптическим датчиком является инфракрасный датчик.
6. Система управления для транспортного средства по п. 1, в которой пороговое значение измерения для целевого объекта, используемое в рефлекторном оптическом датчике, определяют в соответствии с интенсивностью лучей, принимаемых светопринимающим участком в течение определенного времени перед определением.
7. Система управления для транспортного средства по п. 1, отличающаяся тем, что система дополнительно включает в себя средство обнаружения для определения того, находится ли электронный ключ в пределах определенной области от транспортного средства, при этом контроллер управляет заданным объектом управления, когда средство обнаружения определяет наличие электронного ключа в пределах определенной области от транспортного средства, и рефлекторный оптический датчик обнаруживает попадание целевого объекта в полое углубление.
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |

