Область техники, к которой относится изобретение
Настоящее изобретение относится к системам и способам идентификации и управления объектами, а более конкретно, к идентификации и управлению объектами, имеющими контурную поверхность.
Уровень техники
Дверные обшивки из древесно-волокнистой плиты могут быть изготовлены прессованием деревянных составов вместе с полимерами, клеями и другими веществами в тонкие слои, которые затем могут быть ламинированы или приклеены к каркасу, раме или другой опоре, чтобы имитировать сплошную натуральную деревянную дверь. Обшивки дверей из древесно-волокнистой плиты имеют преимущества в экономичности, нелегком повреждении, прочности по времени и легкости веса.
Обшивки дверей из древесно-волокнистой плиты дополнительно могут обеспечивать эффективный способ для оформления различных эстетически приятных форм на поверхности дверей без необходимости сложного вырезания изделий неправильной формы и других трудоемких способов деревообработки. Одна трудность с прессованием дверных обшивок, однако, заключается в том, что края спрессованных дверных обшивок обычно грубые и неравномерные. Эти края должны быть подрезаны до точных размеров относительно отштампованного профиля перед присоединением дверной обшивки к дверной раме.
Известный в настоящее время способ обрезки дверных обшивок до желаемого размера затрагивает выравнивание одного из неровных краев по физической направляющей, краю или пластине и отрезание дверной обшивки на предварительно определенном или измеренном расстоянии от направляющей. Этот способ может приводить в результате к обрезанным дверным обшивкам, которые пространственно находятся вне допуска или профили которых искажены. Неточная резка может закончиться собранной дверью, имеющей заметно перекрывающиеся края и незаконченный внешний вид. Такие двери зачастую должны быть отбракованы, что в конечном счете может закончиться повышенными расходами на производство.
Таким образом, существует необходимость в улучшенных системах и способах идентификации и управления объектами, такими как дверные обшивки.
Раскрытие изобретения
Варианты осуществления настоящего изобретения содержат системы и способы идентификации и управления объектами. Настоящее изобретение может быть осуществлено множеством способов.
Один вариант осуществления настоящего изобретения может содержать систему, имеющую источник света, выполненный с возможностью излучать направленный луч света на контурную поверхность объекта. Луч света может быть приспособлен для того, чтобы освещать профиль, например совокупность подъемов и спадов контурной поверхности. Система может дополнительно содержать датчик, выполненный с возможностью обнаруживать освещенный профиль контурной поверхности. Датчик может быть приспособлен, чтобы формировать первый сигнал, основанный, по меньшей мере, частично на освещенном профиле.
Система может дополнительно содержать процессор в функциональной связи с датчиком. Процессор может быть приспособлен принимать первый сигнал от датчика и сравнивать первый сигнал со вторым сигналом. Второй сигнал может быть ассоциативно связан с предварительно определенным профилем. Процессор может быть приспособлен формировать третий сигнал, основанный на сравнении первого и второго сигналов.
Система может дополнительно содержать контроллер в функциональной связи с процессором. Контроллер может быть приспособлен принимать третий сигнал и формировать сигнал управления перемещением в ответ на третий сигнал. Сигнал управления перемещением может быть основан на характеристике предварительно определенного профиля.
Настоящее изобретение более подробно объяснено в нижеследующем описании и чертежах. Должно быть понятно, что изобретение не ограничено в своем применении к конкретным деталям, как изложено в последующем описании и чертежах. Изобретение допускает другие варианты осуществления и может быть применено или выполнено различными способами.
Краткое описание чертежей
Эти и другие признаки, аспекты и преимущества настоящего изобретения более понятны, когда подробное описание читается со ссылкой на сопровождающие чертежи, где:
Фиг.1 показывает схематическое представление системы в соответствии с вариантом осуществления настоящего изобретения.
Фиг.2 показывает другое схематическое представление фиг.1.
Фиг.3 показывает вертикальную проекцию схематического представления системы на фиг.1.
Фиг.4 показывает профиль контурной поверхности дверной обшивки, показанной на фиг.1.
Фиг.5 показывает блок-схему способа в соответствии с вариантом осуществления настоящего изобретения.
Фиг.6 показывает блок-схему способа в соответствии с другим вариантом осуществления настоящего изобретения.
Осуществление изобретения
Варианты осуществления настоящего изобретения содержат системы и способы идентификации и управления объектами, включающими в себя имеющие контурные поверхности, такие как дверная обшивка с выступающими или углубленными панелями. Примеры других подходящих объектов включают в себя сплошные двери, дверцы шкафов, панели шкафов, фасады ящиков, плинтусы, декоративное литье или любой другой объект, который был украшен узором, профилирован, или неправильную поверхность.
Дверная обшивка из древесно-волокнистой плиты является листом или материалом, который может быть собран с дверной рамой, содержащей перекладины и вертикальные брусья обвязки, чтобы сформировать собранную дверь. Дверная обшивка может содержать, например, номинальный калибр, который изменяется в диапазоне между приблизительно 0,100 дюйма и приблизительно 0,130 дюйма спрессованного продукта с применением процесса сушки древесно-волокнистой плиты первоначально около двух дюймов толщиной.
Обшивка двери из древесно-волокнистой плиты может иметь один или более узоров из выступающих и углубленных областей. Когда дверная обшивка выходит из пресса, ее края часто являются неправильными, тогда как декоративный узор, как правило, согласован и хорошо сформирован.
Согласно варианту осуществления настоящего изобретения контуры или узоры, сформированные на объектах, таких как дверные обшивки, идентифицируются и объект управляется, по меньшей мере, частично на основе характеристик, ассоциативно связанных с конкретным, предварительно определенным контуром или узором. Управление может включать в себя отрезание дверной обшивки до желаемых размеров. Настоящее изобретение использует единообразие и повторяемость контуров или узоров, чтобы создать последовательные манипуляции дверными обшивками, имеющими одинаковые узоры, таким образом устраняя или уменьшая необходимость полагаться на позиционирование дверной обшивки напротив зафиксированной точки или получения физических измерений в определенных вариантах осуществления.
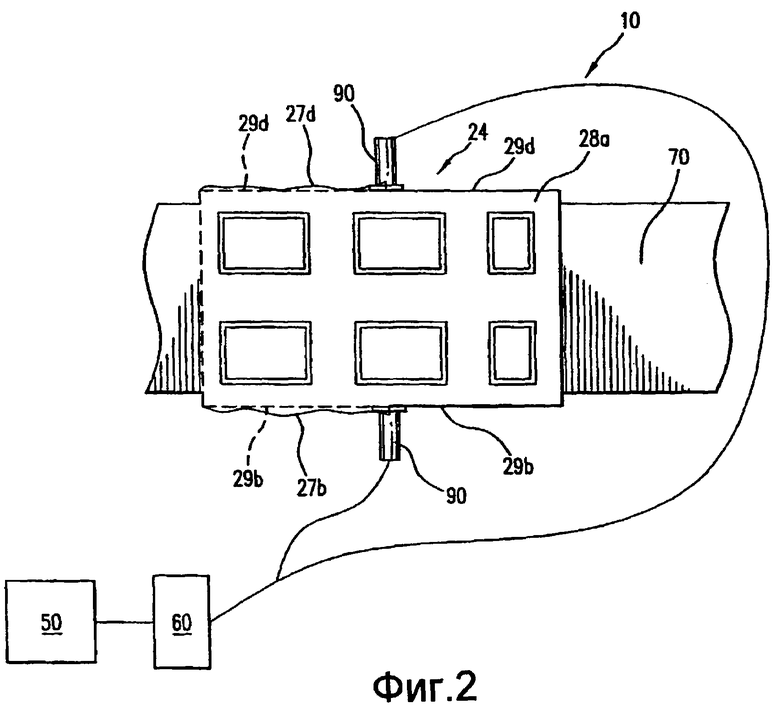
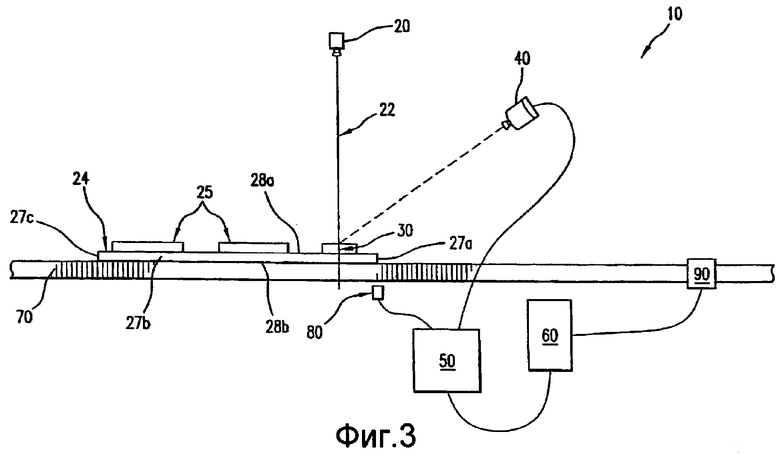
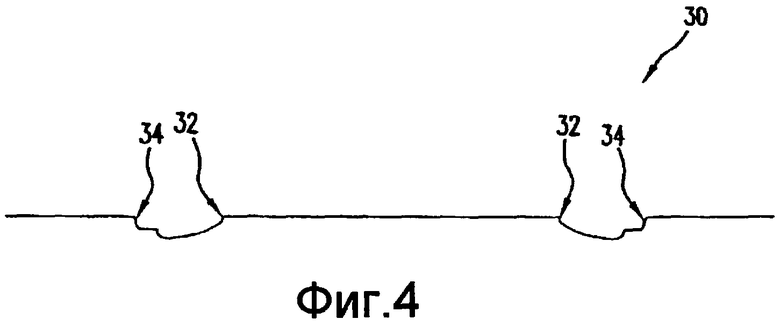
Обращаясь теперь к фиг.1-3, показан вариант осуществления системы 10 согласно настоящему изобретению. Система 10 содержит конвейер 70, излучатель 20, такой как источник света, и первый датчик 40 и второй датчик 80, размещенные в соединении с процессором 50. Как будет описано ниже более подробно, первый датчик 40 может содержать камеру. Система 10 также содержит контроллер 60, размещенный в соединении с процессором 50, и средство 90 резки. Дверная обшивка 24 может быть помещена на конвейер 70, выполненный с возможностью двигать дверную обшивку 24 через множество местоположений. Одно из местоположений, например, может быть непосредственно под источником 20 света, а другое местоположение может быть в средстве 90 резки.
В одном варианте осуществления система 10 может идентифицировать дверную обшивку 24, обнаруживая профиль (показанный на фиг.4) контурной поверхности из одной или более панелей 25 дверной обшивки 24, сравнивая профиль с предварительно определенным профилем (например, целевым профилем) и формируя инструкции для управления дверной обшивкой 24, такие как резка или подравнивание дверной обшивки 24.
Дверная обшивка 24 содержит первую поверхность 28a и вторую поверхность 28b, по существу, параллельную первой поверхности 28a. Первая и вторая поверхности 28a, 28b, по существу, являются плоскими. Как правило, перпендикулярное расстояние между первой поверхностью 28a и второй поверхностью 28b находится между приблизительно 0,100 дюйма и 0,130 дюйма. В одном варианте осуществления перпендикулярное расстояние между первой поверхностью 28a и второй поверхностью 28b находится между приблизительно 0,110 дюйма и 0,120 дюйма. Дверная обшивка 24 может иметь плотность в диапазоне между приблизительно 50 фунтов на кубический фут и 70 фунтов на кубический фут. Могут использоваться другие подходящие плотности для дверной обшивки 24.
Дверная обшивка 24 содержит шесть отпрессованных панелей 25. Панели 25 могут быть размещены на плоскости выше и, по существу, параллельно плоскости, сформированной первой поверхностью 28a. Дверная обшивка 24 содержит шесть отпрессованных углублений 26, окружающих шесть панелей 25. Каждое из множества углублений 26 окружено первой поверхностью 28a. Альтернативно могут быть использованы другие подходящие конфигурации.
Множество краев 27a-d формируют периметр вокруг первой и второй поверхностей 28a, 28b дверной обшивки 24. Края 27a-d являются неправильными и неравномерными в результате процесса изготовления дверной обшивки 24, как описано выше. Степень неровности краев 27a-d была преувеличена, чтобы облегчить понимание настоящего изобретения.
Желаемые края 29a-d показаны скрытыми линиями. Края 29a-d, по существу, являются однородными и прямыми. Края 29a и 29c, по существу, параллельны друг другу, как края 29b и 29d. Края 29a и 29c, по существу, являются перпендикулярными краям 29b и 29d. Как будет описано более детально ниже, дверная обшивка 24 будет обрезана или отрезана так, что края 27a-d будут удалены, а желаемые края 29a-d сформируют периметр первой и второй поверхностей 28a, 28b дверной обшивки 24.
Источник 20 света выполнен с возможностью излучать направленный луч 22 света на первую поверхность 28a дверной обшивки 24. В одном варианте осуществления направленный луч 22 света может содержать лазер. Могут использоваться другие направленные источники света, такие как линейные и многомерные коллимирующие матрицы. В другом варианте осуществления другие источники энергии могут излучать на дверную обшивку, такие как, например, инфракрасная энергия.
Направленный луч 22 света проецируется на часть дверной обшивки 24, на которой сформированы одна или более из отпрессованных панелей 25. Источник 20 света помещен на первом расстоянии от первой поверхности 28a дверной обшивки 24. В одном варианте осуществления первое расстояние может быть фиксированным. Альтернативно первое расстояние может быть переменным и регулироваться по желанию. Первое расстояние может включать в себя расстояния между двумя и четырьмя футами над первой поверхностью 28a. Другие расстояния могут быть подходящими в зависимости от интенсивности луча 22 света и чувствительности камеры 40.
Например, если источник 20 света помещен слишком близко к первой поверхности 28a, линза, которая сводит в параллельный пучок луч 22 света, может рассеивать луч 22 света слишком сильно, получая в результате размытое отражение луча 22 света. Наоборот, если источник 20 света помещен слишком далеко от первой поверхности 28a, источник 20 света не может излучать сильный луч 22 света, достаточный, чтобы четко отражаться от первой поверхности 28a.
Источник 20 света направлен так, чтобы излучать направленный луч 22 света в направлении, по существу, перпендикулярном первой поверхности 28a дверной обшивки 24. Источник 20 света может быть помещен иным образом, например сбоку дверной обшивки 24, излучая направленный луч 22 света скрытно относительно первой поверхности 28a дверной обшивки 24.
Обращаясь теперь к фиг.4, показан профиль 30 контурной поверхности дверной обшивки 24, освещенной направленным лучом 22 света. Профиль 30 контурной поверхности 26 является видимым, когда направленный луч 22 света освещает и отражается от контурной поверхности дверной обшивки 24. Направленный луч 22 света изгибается в предсказуемый узор на основе контуров контурной поверхности дверной обшивки 24. Поднятые области панелей 25 могут быть указаны или представлены наклонными плоскостями 32, а углубления 26 могут быть указаны или представлены спадами 34 профиля 30.
Обращаясь опять к фиг.1-3, первый датчик 40, такой как камера, может быть выполнен с возможностью обнаруживать или видеть профиль 30 контурной поверхности дверной обшивки 24, освещенной направленным лучом 22 света. Камера помещена так, чтобы принимать свет, отраженный от контурной поверхности, в области, где направленный луч 22 света падает на контурную поверхность.
Камера 40 помещена на предварительно определенном продольном расстоянии от края 27a дверной обшивки 24 и на предварительно определенном вертикальном расстоянии над первой поверхностью 28a дверной обшивки 24. Камера 40 может быть помещена между 2 и 12 футами от первой поверхности 28a. В одном варианте осуществления камера 40 может быть помещена в пяти-шести футах от первой поверхности 28a.
Помещение камеры 40 наклонно к первой поверхности 28a дверной обшивки 24 делает контуры дверной обшивки 24 видимыми. Камера 40 может быть помещена относительно первой поверхности 28a под углом между 20 и 60 градусами. В одном варианте осуществления камера 40 может быть помещена под углом приблизительно в 40 градусов над плоскостью первой поверхности 28a.
Если камера 40 была помещена перпендикулярно первой поверхности 28a дверной обшивки 24, результирующий профиль (не показан) появится как прямая линия, а контуры дверной обшивки будут незаметными. Вдобавок, если камера 40 была помещена копланарно с первой поверхностью 28a, только наивысшие точки контуров дверной обшивки, вероятно, будут легко различимы.
Камера 40 приспособлена формировать первый сигнал, по меньшей мере, частично на основе освещенного профиля 30. Например, камера 40 может захватывать или записывать неподвижное изображение профиля 30, которое может затем быть преобразовано в цифровой сигнал. Альтернативно камера 40 может захватывать или записывать перемещающееся изображение профиля 30.
Камера 40 может содержать детектор, который может быть матрицей детектора с зарядовой связью (CCD) или матрицей детекторов с комплементарной структурой металл-оксид-полупроводник. Камера 40 может также содержать схему, управляющую электронику и источник наклонного света. В типичной CCD-камере CCD является аналоговым устройством, которое способно удерживать носители заряда и поэтому способно записывать изменяющиеся оттенки света. Аналогово-цифровой преобразователь в камере затем квантифицирует переменные заряды в дискретные оттенки, представляющие контрасты света и тени, обнаруженные камерой.
Первый сигнал может быть цифровым представлением освещенного профиля 30, который в типичном варианте будет более светлым оттенком, чем дверная обшивка 24. Изгиб луча 22 света может быть захвачен камерой 40 как точечное изображение на CCD. Точечное изображение представляет контрасты света и тени, рассмотренные камерой 40. Камера 40 приспособлена передавать первый сигнал процессору 50. Процессор 50 размещен в функциональной связи с камерой 40. Термин "устанавливать связь" или “связь” означает механический, электрический, оптический или иной контакт, связь или соединение либо прямым, косвенным, либо функциональным способом.
Процессор 50 может содержать машиночитаемый носитель, такой как оперативное запоминающее устройство (RAM) (не показано), соединенное с процессором (не показан). Процессор 50 может выполнять инструкции машиноисполняемой программы, сохраненные в памяти (не показана). Такой процессор может содержать, например, микропроцессор, ASIC или конечные автоматы. Такой процессор содержит или может быть в соединении с носителями, например, машиночитаемыми носителями, которые хранят инструкции, которые, когда выполняются процессором, заставляют процессор выполнять процессы, описанные в данном документе.
Варианты осуществления машиночитаемых носителей включают в себя, но не ограничиваются, электронное, оптическое, магнитное или другое устройство хранения или передачи, способное обеспечить процессор машиночитаемыми инструкциями. Другие примеры подходящих носителей включают в себя, но не ограничиваются, гибкий диск, CD-ROM, DVD, магнитный диск, микросхему памяти, ROM, RAM, ASIC, сконфигурированный процессор, все оптические носители, все магнитные ленты или другие магнитные носители или любой другой носитель, с которого процессор компьютера может считать инструкции.
Также различные другие формы машиночитаемых носителей могут передавать или нести инструкции компьютеру, включающему в себя маршрутизатор, частную сеть, или сеть общего пользования, или другое устройство передачи, или канал, как проводной, так и беспроводной. Инструкции могут содержать код из любого подходящего компьютерного языка программирования, включающего в себя, например, C, C++, C#, Visual Basic, Java, Python, Perl и JavaScript.
Процессор 50 может функционировать, например, в любой подходящей операционной системе, способной поддерживать браузер или приложение с включенным браузером, такой как Microsoft® Windows® или Linux. Такой процессор включает в себя, например, персональные компьютеры, выполняющие программу приложения браузера, такую как Internet Explorer™ Корпорации Microsoft, Netscape Navigator™ Корпорации Netscape Communication и Safari™ фирмы Apple Computer, Inc.
Процессор 50 приспособлен принимать первый сигнал, сформированный камерой 40, и сравнивать первый сигнал со вторым сигналом, представляющим или ассоциативно связанным с предварительно определенным профилем (не показан). Предварительно определенный или целевой профиль может быть выбран в начале процесса. Целевое точечное изображение может представлять поверхность (например, контур), характерную для дверной обшивки 24. Например, перед тем как дверная обшивка 24 входит в видимую область камеры 40, процессор 50 может управляться так, чтобы сравнить освещенный профиль 30 с предварительно определенным профилем.
Физические характеристики или свойства дверной обшивки могут быть ассоциативно связаны с предварительно определенным профилем. Такие значения или характеристики могут включать в себя, например, точечные шаблоны и/или интенсивности, размеры дверной обшивки или позицию или размещение отдельной точки профиля, например, отдельного края или стороны отдельного профиля от отдельного края дверной обшивки или от отдельной позиции видимой позиции. Такие значения или характеристики могут также включать в себя местоположения от опорной точки выпуклостей или впадин в контурах дверной обшивки. Процессор 50 может сравнить сигнал, ассоциативно связанный с измеренными характеристиками и соответствующими местоположениями этих характеристик в видимом изображении, с характеристиками предварительно определенного профиля, сохраненными в базе данных (не показана).
В другом варианте осуществления процессор 50 может сравнить первый сигнал с множеством вторых сигналов. Множество вторых сигналов могут, каждый, быть ассоциативно связаны с множеством предварительно определенных профилей, например профилей из библиотеки или компиляции различных изображений, которые могут быть сформированы на дверной обшивке. Множество предварительно определенных профилей могут быть сохранены в базе данных в функциональной связи с процессором 50.
При сравнении первого сигнала с одним из множества вторых сигналов процессор может распознать или идентифицировать второй сигнал, который представляет или ассоциативно связан с предварительно определенным профилем, который точно совпадает или близко совпадает с сигналом, который представляет или ассоциативно связан с освещенным профилем. Когда процессор 50 не нашел совпадения освещенного профиля с одним из множества предварительно определенных профилей, процессор 50 может сравнивать повторяющимся образом освещенный профиль с другими предварительно определенными профилями до тех пор, пока совпадение не будет найдено или пока база данных предварительно определенных пользователей не будет исчерпана.
Процессор 50 приспособлен формировать третий сигнал, основанный на сравнении первого и второго сигналов. Третий сигнал может содержать информацию о том, что значение первого сигнала равняется значению одного из множества вторых сигналов, т.е. третий сигнал может определять, какой из множества вторых сигналов совпадает с первым сигналом. Третий сигнал может также указывать, что первый сигнал не равен значению какого-либо из вторых сигналов. Как указано выше, третий сигнал может также указывать, что освещенный профиль смещен от предварительно определенного профиля или данной точки или позиции на предварительно определенном профиле на предварительно определенное расстояние.
Контроллер 60 находится в функциональной связи с процессором 50. Контроллер 60 может содержать, например, контроллер с программируемой логикой. В одном варианте осуществления контроллер 60 может содержать реле. В другом варианте осуществления контроллер может содержать микропроцессор. Контроллер 60 может содержать процессор, как описано выше со ссылкой на процессор 50. Могут использоваться другие подходящие процессоры. Контроллер 60 может быть приспособлен управлять всей системой 20 или частями системы 10, такими как конвейер 70 и/или режущее средство 90. Альтернативно первый процессор 50 может быть приспособлен управлять системой 10 без связи с контроллером 60.
Контроллер 60 может быть приспособлен принимать третий сигнал, сформированный процессором 50, и формировать сигнал управления перемещением в ответ на третий сигнал. Сигнал управления перемещением основан на физических значениях или характеристиках, обсужденных выше со ссылкой на предварительно определенные профили. Сигнал управления перемещением может именоваться как инструкция перемещения, которое может быть абсолютным или инкрементным. Сигнал управления перемещением может содержать инструкцию режущему средству 90 передвинуться на определенное расстояние, чтобы отрезать или подрезать кромки дверной обшивки 24.
Расстояние, на которое перемещается перемещающее средство 90, может использоваться при смещении, или разнице, между позицией предварительно определенного (т.е. известного) профиля и освещенного (т.е. видимого) профиля. Например, третий сигнал может содержать информацию о том, что освещенный профиль смещен от предварительно определенного профиля на некоторое расстояние. Альтернативно третий сигнал может содержать информацию относительно смещения отдельного ориентира освещенного профиля по сравнению с предварительно определенным профилем. Сигнал управления перемещением может затем управлять перемещающим средством, чтобы переместить его на это расстояние, так что резка делается в подходящем местоположении. Кодеры (не показаны) используются, чтобы обеспечить обратную связь по позиции режущего средства 90.
Альтернативно сигнал управления перемещением может содержать инструкцию, такую, чтобы дверная обшивка 24 перемещалась к другой позиции на технологической линии без отрезания или чтобы интерфейсному устройству сообщалось предупреждение или сигнал тревоги, предупреждающие оператора о том, что освещенный профиль 30 дверной обшивки 24 не совпадает с каким-либо из сохраненных предварительно определенных профилей.
Режущее средство 90 может содержать одну или две пилы, ножа или разделителей, управляемых сервомотором или другим подходящим режущим устройством. Режущее устройство 90 может быть приспособлено перемещаться относительно дверной обшивки 24, причем перемещение режущего средства 90 управляется, по меньшей мере, частично сигналом управления перемещением. Дверная обшивка 24 может быть предварительно выровнена, а режущие средства 90 регулируются относительно предварительно выровненной дверной обшивки 24. Альтернативно дверная обшивка 24 может не быть предварительно выровнена, а дверная обшивка 24 может двигаться или перемещаться относительно режущего средства 90.
Режущее средство 90 выполнено с возможностью принимать сигнал управления перемещением и может перемещаться или двигаться, чтобы резать дверную обшивку 24. Как показано на фиг.2, режущее средство 90 реагирует на сигнал управления перемещением, чтобы отрезать дверную обшивку, по существу, выровненную с краями 29b и 29d. Таким образом удаляется материал между краями 27b и 29b и 27d и 29d.
В другом варианте осуществления система 10 может дополнительно содержать средство для выравнивания дверной обшивки 24 относительно конвейера или в альтернативном варианте относительно режущего средства 90. Выравнивающее средство (не показано) может быть размещено в функциональной связи с контроллером 60 и может управляться, по меньшей мере, частично сигналом управления перемещением. Выравнивающее средство может содержать, например, направляющие, которые касаются сторон или верха дверной обшивки 24, механический манипулятор, который касается сторон или верха дверной обшивки 24, часть конвейера 70, которая касается низа края обшивки, или любое другое средство для выравнивания дверной обшивки 24. Выравнивающее средство может быть перемещающимся так, чтобы выравнивать дверную обшивку 24 в одной из множества ориентаций. Сигнал управления перемещением может нести сигнал перемещения выравнивающего средства.
Система 10 может дополнительно содержать датчик 80 в функциональной связи с процессором 50. Датчик 80 приспособлен обнаруживать позицию дверной обшивки 24 относительно камеры 40. Датчик может быть визуальным, инфракрасным, позиционным или любым другим подходящим датчиком. Например, датчик 80 может быть помещен так, чтобы обнаруживать позицию дверной обшивки 24, когда дверная обшивка 24 находится в поле зрения камеры 40.
Датчик 80 может сообщать процессору 50 позицию дверной обшивки 24. Процессор 50 может быть выполнен с возможностью инициировать свое сравнение первого и второго сигналов, когда процессор 50 принимает сообщение от датчика 80 о том, что дверная обшивка 24 находится в отдельной позиции. Датчик 80 может обнаружить передний край дверной обшивки 24. В другом варианте осуществления концевой датчик (не показан) может обнаружить задний край дверной обшивки 24. Комбинация датчика 80 и концевого датчика может обнаружить, правильно ли выровнена дверная обшивка 24.
Обращаясь теперь к фиг.5, показан способ 100 согласно варианту осуществления настоящего изобретения. Способ 100 может использоваться для того, чтобы идентифицировать и управлять дверной обшивкой или другими подходящими объектами, имеющими контурную поверхность.
Как указано блоком 110, способ 100 может содержать освещение профиля контурной поверхности объекта, такого как дверная обшивка. Профиль может быть освещен посредством излучения направленного луча света на контурную поверхность объекта. Профиль может быть освещен способом, подобным описанному выше относительно системы 10. Альтернативно другие подходящие системы или способы могут использоваться, чтобы освещать профиль объекта.
Как указано блоком 120, способ 100 может дополнительно содержать обнаружение освещенного профиля контурной поверхности. Как описано выше, освещенный профиль может быть видим датчиком, таким как камера. Альтернативно профиль может быть обнаружен, увиден или записан другими подходящими датчиками.
Как указано блоком 130, способ 100 может дополнительно содержать передачу цифрового представления освещенного профиля контурной поверхности процессору. Процессор может быть подобен описанному выше. Альтернативно могут быть использованы другие подходящие процессоры. Камера может быть приспособлена формировать цифровой сигнал, представляющий освещенный профиль, обнаруженный камерой. Датчик может быть размещен в функциональной связи с процессором, так что цифровой сигнал, сформированный датчиком, передается процессору.
Как указано блоком 140, способ 100 может дополнительно содержать сравнение освещенного профиля контурной поверхности с предварительно определенным профилем. Профиль может быть сравнен с предварительно определенным профилем посредством сравнения первого сигнала, представляющего или ассоциативно связанного с освещенным профилем, со вторым сигналом, представляющим или ассоциативно связанным с предварительно определенным профилем.
Как указано блоком 150, способ 100 дополнительно содержит управление объектом, по меньшей мере, частично на основе предварительно определенной характеристики, ассоциативно связанной с предварительно определенным профилем, например отдельный размер или позиция профиля. Как описано выше, управление дверной обшивкой может содержать повторное позиционирование обшивки дверей, резку дверной обшивки или иное физическое изменение дверной обшивки.
Машиночитаемый носитель серверного устройства, процессор или другое устройство или приложение содержит инструкции, которые, когда выполняются, заставляют серверное устройство, приложение, процессор или другое устройство или приложение выполнять способ 100. Серверное устройство, управляющее ресурсами приложение и машиночитаемый носитель могут быть подобны описанным выше. Альтернативно могут быть использованы другие подходящие серверные устройства, приложения, машиночитаемые носители, процессоры или другие устройства или приложения.
Обращаясь теперь к фиг.6, показан способ 200 согласно другому варианту осуществления настоящего изобретения. Способ 200 может использоваться для того, чтобы идентифицировать и управлять объектом, который имеет контурную поверхность, таким как дверная обшивка.
Как указано блоком 210, способ 200 может содержать предоставление источника света, приспособленного излучать направленный луч света на контурную поверхность объекта, такого как дверная обшивка. Источник света может содержать лазер. Направленный луч света может быть приспособлен освещать профиль контурной поверхности, освещая подъемы и впадины в контурной поверхности.
Как указано блоком 220, способ 200 может дополнительно содержать предоставление первого датчика, такого как камера, приспособленного обнаруживать профиль контурной поверхности, освещенной направленным лучом света. Камера может содержать камеру с детектором с зарядовой связью, которая может видеть освещенный профиль контурной поверхности. Камера может быть приспособлена формировать первый сигнал, основанный, по меньшей мере, частично на освещенном профиле. Например, камера может захватить цифровое изображение освещенного профиля и сформировать первый сигнал, ассоциативно связанный с цифровым изображением.
Как указано блоком 230, способ 200 может дополнительно содержать размещение процессора в функциональной связи с датчиком. Процессор может быть приспособлен принимать первый сигнал и сравнивать первый сигнал со вторым сигналом. Второй сигнал ассоциативно связан с цифровым изображением предварительно определенного профиля. Множество предварительно определенных профилей может быть сохранено в базе данных в функциональной связи с процессором. Один из множества предварительно определенных профилей может быть выбран для сравнения с освещенным профилем. Процессор может быть приспособлен формировать третий сигнал, основанный на сравнении первого и второго сигналов. Например, третий сигнал может содержать информацию об относительном или абсолютном позиционировании дверной обшивки, как описано выше. Третий сигнал может содержать другую подходящую информацию.
Как указано блоком 240, способ 200 может дополнительно содержать размещение контроллера в функциональной связи с процессором. Контроллер может быть подобен описанному выше. Альтернативно могут быть использованы другие подходящие контроллеры. Контроллер может быть приспособлен принимать третий сигнал и формировать сигнал управления перемещением, основанный, по меньшей мере, частично на третьем сигнале. Сигнал управления перемещением может содержать инструкции для того, чтобы перемещать или управлять объектом относительно данного местоположения, такого как местоположение резки.
Как показано блоком 250, способ 200 может дополнительно содержать предоставление конвейера, приспособленного передвигать дверную обшивку через множество местоположений. Например, местоположение, в котором дверная обшивка находится непосредственно под источником света, может быть одним местоположением, через которое конвейер передвигает дверную обшивку, а местоположение, в котором режущее средство режет дверную обшивку, может быть другим таким местоположением. Как указано блоком 260, способ 200 может дополнительно содержать предоставление средства для резки дверной обшивки, такое как пила, нож или разделитель, управляемый сервомотором, или другое подходящее режущее устройство. Режущее средство может быть размещено в функциональной связи с котроллером так, что сигнал управления перемещением направляет режущее средство в место, где нужно отрезать дверную обшивку. Конвейер может также быть размещен в функциональной связи с контроллером, причем сигнал управления перемещением направляет перемещение конвейера.
Как показано блоком 270, способ 200 может дополнительно содержать предоставление способа для выравнивания дверной обшивки либо относительно конвейера, либо относительно режущего средства. Выравнивающее средство может быть размещено в функциональной связи с контроллером и управляться, по меньшей мере, частично сигналом управления перемещением. Например, сигнал управления перемещением может указать выравнивающему средству, что дверная обшивка должна двигаться в другую позицию относительно конвейера или относительно режущего средства. Выравнивающее средство может затем передвигать дверную обшивку на основе инструкции сигнала управления перемещением. Выравнивающее средство может содержат направляющие, которые касаются сторон или верха дверной обшивки, механический манипулятор, который касается сторон или верха дверной обшивки, часть конвейера, которая касается низа дверной обшивки, или любое другое подходящее средство для выравнивания дверной обшивки.
Как указано блоком 280, способ 200 может дополнительно содержать размещение второго датчика в функциональной связи с процессором. Второй датчик может быть приспособлен обнаруживать позицию дверной обшивки относительно камеры или относительно некоторого другого ориентира. Например, второй датчик может быть помещен, чтобы обнаруживать позицию дверной обшивки, когда дверная обшивка находится в поле зрения камеры. Когда второй датчик обнаруживает такую позицию, второй датчик может сообщить процессору позицию дверной обшивки. Процессор может быть приспособлен инициировать сравнение первого и второго сигналов, когда процессор принимает сообщение от второго датчика о том, что дверная обшивка находится в отдельной позиции.
Последующее описание иллюстративных вариантов осуществления изобретения было представлено только в целях иллюстрации и описания и не предназначено быть исчерпывающим или ограничивать изобретение раскрытыми точными формами. Многочисленные модификации и адаптации его будут ясны специалистам в области техники без отступления от духа и цели настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОСВЕТИТЕЛЬНЫЙ УЗЕЛ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2015 |
|
RU2705511C2 |
| ИЗБИРАТЕЛЬНО ВИДИМЫЙ ИНТЕРФЕЙС ПОЛЬЗОВАТЕЛЯ | 2015 |
|
RU2679574C2 |
| СИСТЕМА ОСВЕЩЕНИЯ, ОСВЕТИТЕЛЬНОЕ УСТРОЙСТВО И ОСВЕТИТЕЛЬНАЯ СИСТЕМА | 2016 |
|
RU2720438C2 |
| УСТРОЙСТВО УВЕДОМЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СИСТЕМА УВЕДОМЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2015 |
|
RU2680541C2 |
| МОДУЛЬ ФОРМИРОВАНИЯ ДВУНАПРАВЛЕННОГО СВЕТА | 2016 |
|
RU2714693C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ЗАХВАТА БЕЗАРТЕФАКТНЫХ ИЗОБРАЖЕНИЙ | 2012 |
|
RU2623795C2 |
| АДАПТИВНАЯ СИСТЕМА ОСВЕЩЕНИЯ ДЛЯ ЗЕРКАЛЬНОГО КОМПОНЕНТА И СПОСОБ УПРАВЛЕНИЯ АДАПТИВНОЙ СИСТЕМОЙ ОСВЕЩЕНИЯ | 2017 |
|
RU2729045C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СШИВАНИЯ | 2004 |
|
RU2335586C2 |
| УСТРОЙСТВО ПОДСВЕТКИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2015 |
|
RU2690961C2 |
| ЭФФЕКТИВНЫЙ СПОСОБ И СИСТЕМА ДЛЯ ПОЛУЧЕНИЯ ДАННЫХ ИЗОБРАЖЕНИЯ СЦЕНЫ И ИЗОБРАЖЕНИЯ РАДУЖНОЙ ОБОЛОЧКИ С ИСПОЛЬЗОВАНИЕМ ОДНОГО ДАТЧИКА | 2012 |
|
RU2589859C2 |


Раскрыты системы и способы идентификации и управления объектами, имеющими контурную поверхность. Технический результат - повышение точности управления для изготовления объектов. Одна раскрытая система содержит источник света (20), выполненный с возможностью излучать направленный луч света (22) на контурную поверхность, датчик (40), выполненный с возможностью видеть профиль контурной поверхности, освещенной направленным лучом света, процессор (50) в сообщении с датчиком и контроллер (60) в сообщении с процессором. Контроллер может быть приспособлен формировать сигнал на основе характеристики предварительно определенного профиля. 4 н. и 28 з.п. ф-лы, 6 ил.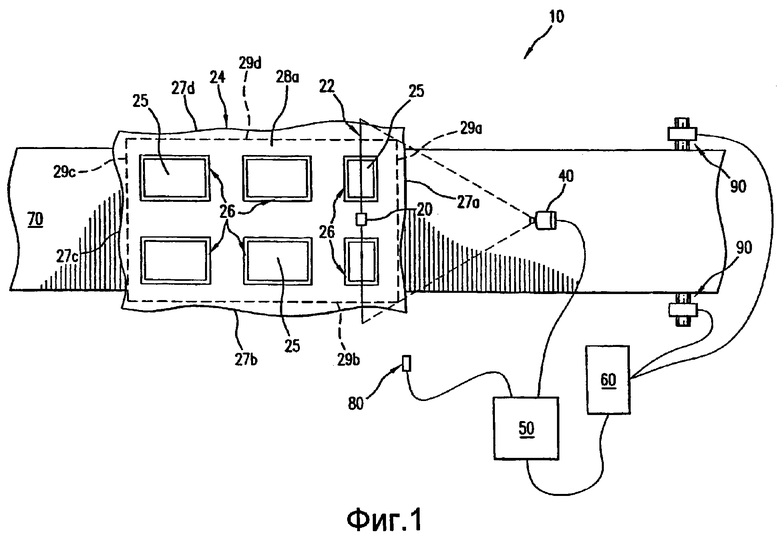
1. Система для идентификации и управления объектами, имеющими контурную поверхность, содержащая:
источник света, выполненный с возможностью излучать направленный луч света на контурную поверхность объекта, направленный луч света, выполненный с возможностью освещать профиль контурной поверхности;
первый датчик, выполненный с возможностью обнаруживать освещенный профиль контурной поверхности и формировать первый сигнал, основанный, по меньшей мере, частично на освещенном профиле;
второй датчик, выполненный с возможностью обнаруживать позицию объекта относительно первого датчика и формировать сигнал обнаружения позиции;
процессор в функциональной связи с первым и вторым датчиками, процессор приспособлен принимать первый сигнал и сигнал обнаружения позиции и сравнивать первый сигнал со вторым сигналом, ассоциативно связанным с предварительно определенным профилем, причем процессор приспособлен формировать третий сигнал, основанный на сравнении первого и второго сигналов; и
контроллер в функциональной связи с процессором, контроллер приспособлен принимать третий сигнал и формировать сигнал управления перемещением в ответ на третий сигнал, сигнал управления перемещением основан на характеристике предварительно определенного профиля.
2. Система по п.1, в которой процессор формирует третий сигнал, когда значение первого сигнала, по существу, равно значению второго сигнала.
3. Система по п.2, причем система дополнительно содержит:
конвейер, выполненный с возможностью перемещать объект через множество местоположений; и режущее средство для резки объекта, режущее средство находится в функциональной связи с контроллером.
4. Система по п.3, дополнительно содержащая средство для выравнивания объекта относительно конвейера, выравнивающее средство размещено в функциональной связи с контроллером и управляется, по меньшей мере, частично сигналом управления перемещением.
5. Система по п.3, дополнительно содержащая выравнивающее средство для выравнивания объекта относительно режущего средства, выравнивающее средство размещено в функциональной связи с контроллером и управляется, по меньшей мере, частично сигналом управления перемещением.
6. Система по п.1, в которой характеристика содержит предварительно определенный размер предварительно определенного профиля.
7. Система по п.3, в которой режущее средство приспособлено перемещаться относительно объекта, при этом режущее средство управляется, по меньшей мере, частично сигналом управления перемещением.
8. Система по п.1, в которой второй сигнал содержит множество вторых сигналов, ассоциативно связанных с множеством предварительно определенных профилей.
9. Система по п.8, в которой множество предварительно определенных профилей сохранено в базе данных в функциональной связи с процессором.
10. Система по п.1, в которой объект содержит дверную обшивку.
11. Способ идентификации и управления объектами, имеющими контурную поверхность, содержащий этапы, на которых:
освещают профиль контурной поверхности объекта;
обнаруживают освещенный профиль контурной поверхности и позицию объекта;
сравнивают освещенный профиль контурной поверхности и позицию объекта с предварительно определенным профилем и
управляют объектом, по меньшей мере, частично на основе предварительно определенной характеристики, ассоциативно связанной с предварительно определенным профилем.
12. Способ по п.11, дополнительно содержащий этап, на котором передают цифровое представление освещенного профиля контурной поверхности процессору, где предварительно определенный профиль сохранен в базе данных в функциональной связи с процессором.
13. Способ по п.11, в котором управление объектом содержит этап, на котором отрезают объект.
14. Способ по п.11, в котором характеристика содержит предварительно определенный размер.
15. Способ по п.11, в котором освещение профиля контурной поверхности объекта содержит этап, на котором излучают направленный луч света на контурную поверхность.
16. Способ по п.11, в котором предварительно определенный профиль содержит множество предварительно определенных профилей.
17. Способ по п.16, дополнительно содержащий этап, на котором выбирают один из множества предварительно определенных профилей, выбранный профиль сопоставляют, по существу, с освещенным профилем.
18. Способ по п.11, в котором объект содержит дверную обшивку.
19. Способ идентификации и управления объектами, имеющими контурную поверхность, содержащий этапы, на которых:
предоставляют источник света, выполненный с возможностью излучать направленный луч света на контурную поверхность объекта, направленный луч света, выполненный с возможностью освещать профиль контурной поверхности;
предоставляют первый датчик, выполненный с возможностью обнаруживать профиль контурной поверхности, освещенный направленным лучом света, и выполненный с возможностью формировать первый сигнал, основанный, по меньшей мере, частично на освещенном профиле;
предоставляют второй датчик, выполненный с возможностью обнаруживать позицию объекта относительно первого датчика и формировать сигнал обнаружения позиции;
обеспечивают процессор в функциональной связи с первым и вторым датчиками, процессор приспособлен принимать первый сигнал и сигнал обнаружения позиции и сравнивать первый сигнал со вторым сигналом, ассоциативно связанным с предварительно определенным профилем, причем процессор приспособлен формировать третий сигнал, основанный на сравнении первого и второго сигналов; и
обеспечивают контроллер в функциональной связи с процессором, контроллер приспособлен принимать третий сигнал и формировать сигнал управления перемещением в ответ на третий сигнал, сигнал управления перемещением основан на характеристике предварительно определенного профиля.
20. Способ по п.19, в котором процессор формирует третий сигнал, когда значение первого сигнала, по существу, равно значению второго сигнала.
21. Способ по п.19, дополнительно содержащий этапы, на которых:
предоставляют конвейер, выполненный с возможностью перемещать объект через множество местоположений; и предоставляют средство для резки объекта, режущее средство находится в функциональной связи с контроллером.
22. Способ по п.21, дополнительно содержащий средство для выравнивания объекта относительно конвейера, выравнивающее средство размещено в функциональной связи с контроллером и управляется, по меньшей мере, частично сигналом управления перемещением.
23. Способ по п.21, дополнительно содержащий средство для выравнивания объекта относительно режущего средства, выравнивающее средство размещено в функциональной связи с контроллером и управляется, по меньшей мере, частично сигналом управления перемещением.
24. Способ по п.19, в котором характеристика содержит предварительно определенный размер предварительно определенного профиля.
25. Способ по п.19, в котором второй сигнал содержит множество вторых сигналов, ассоциативно связанных с множеством предварительно определенных профилей.
26. Способ по п.19, в котором объект содержит дверную обшивку.
27. Машиночитаемый носитель, на котором находится закодированный программный код для идентификации и управления объектами, имеющими контурную поверхность, причем программный код содержит:
программный код для освещения профиля контурной поверхности объекта;
программный код для обнаружения освещенного профиля контурной поверхности и позиции объекта;
программный код для сравнения освещенного профиля контурной поверхности и позиции объекта с предварительно определенным профилем и
программный код для управления объектом на основе, по меньшей мере, частично предварительно определенной характеристики, ассоциативно связанной с предварительно определенным профилем.
28. Машиночитаемый носитель по п.27, дополнительно содержащий программный код для передачи цифрового представления освещенного профиля контурной поверхности процессору, где предварительно определенный профиль сохранен в базе данных в функциональной связи с процессором.
29. Машиночитаемый носитель по п.27, в котором программный код для управления объектом содержит программный код для резки объекта.
30. Машиночитаемый носитель по п.27, в котором характеристика содержит предварительно определенный размер предварительно определенного профиля.
31. Машиночитаемый носитель по п.27, в котором программный код для освещения профиля контурной поверхности объекта содержит программный код для излучения направленного луча света на контурную поверхность.
32. Машиночитаемый носитель по п.27, в котором объект содержит дверную обшивку.
| Система измерения расхода жидкости | 1983 |
|
SU1093899A1 |
| EP 0496968 A1, 05.08.1992 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| DE 10002230 A1, 26.07.2001 | |||
| RU 2058546 C1, 20.04.1996 | |||
| УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ДОКУМЕНТОВ | 2001 |
|
RU2219580C2 |

