Область техники
[0001] Настоящее изобретение относится к датчику для использования с автоматической дверью, в частности к такому датчику, использующему области обнаружения, расположенные двумерным образом.
Уровень техники
[0002] В источнике Патентная литература 1 раскрыт пример датчика для использования с автоматической дверью, имеющего области обнаружения, расположенные двумерным образом. В соответствии с технологией, раскрытой в источнике Патентная литература 1, для формирования матрицы световых зон на полу вблизи двери автоматической дверной системы используют светоизлучающие средства для проецирования световых пятен. Свет, отраженный от каждой из указанных световых зон на полу принимается светопринимающими средствами. Если свет от любой по меньшей мере одной из указанных световых зон прерван, то это оценивают как обнаружение человека, и на основании этой оценки дверь открывается.
Литература уровня техники
Патентная литература
[0003] 1: JP 2007-277829 A
2: JP 1999-311060 A
Сущность изобретения
Техническая проблема
[0004] Согласно нормативам безопасности для автоматических дверей (секций для автоматических дверей раздвижного типа), составленным Японской ассоциацией автоматических дверей в целях улучшения безопасности пользователей, проходящих через автоматические раздвижные двери, охват области обнаружения датчика для использования в автоматических дверях (т.е. область обнаружения, по которой датчик может осуществлять обнаружение присутствия человека вблизи траектории, по которой перемещается дверная панель, непрерывно или в течение заданного временного периода при открытии или закрытии двери) должен быть по меньшей мере 1000 мм от линии, проходящей через центр в направлении вдоль толщины дверной панели, а концы в направлении вдоль ширины области обнаружения должны быть 150 мм или больше вне внешних концов эффективной ширины проема дверной панели (т.е. ширина проема автоматической двери, через который могут проходить люди). Таким образом, область обнаружения является относительно большой, так что, даже когда человек, не имеющий намерения проходить через автоматическую дверь, проходит близко к дверной панели, то дверная панель может нежелательно открыться или оставаться открытой. В таком случае, если температурный контроль внутри здания с установленной в нем автоматической дверной системой достигается по средством оборудования для кондиционирования воздуха, то он может быть нежелательно ослаблен. Кроме того, может быть снижена тишина внутри здания. Таким образом, использование вышеописанной эффективной ширины проема может привести к увеличению нагрузки на окружающую среду. Ненамеренное открытие дверной панели следует предотвратить посредством уменьшения области обнаружения при закрытой дверной панели по сравнению с областью обнаружения, удовлетворяющей указанным нормативам безопасности, и расширения области обнаружения при открытой двери до ширины, удовлетворяющей указанным нормативам безопасности. Однако период времени между обнаружением человека при закрытой дверной панели и прибытием человека к двери является коротким, так что может произойти, что дверная панель не откроется даже после прибытия человека к двери. Это означает, что дверная проходимость не является хорошей. Также отмечено, что в этом случае, стоит только дверной панели открыться, она остается открытой до тех пор, пока человек перемещается вблизи дверной панели и параллельно с ней.
[0005] Вышеописанную проблему следует решать при помощи, например, открытия дверной панели только тогда, когда человек приближается к ней, как раскрыто в источнике Патентная литература 2. В соответствии с технологией источника Патентная литература 2 определение направления для оценки, приближается ли человек к двери или нет, делается следующим образом. Для формирования множества линий наблюдения, проходящих параллельно дверной панели и отделенных друг от друга в направлении от этой дверной панели, используют множество световых датчиков. Каждая строка наблюдения имеет участки наблюдения, отделенные друг от друга в направлении вдоль дверной панели. Оценивают, что человек приближается к дверной панели тогда, когда линии наблюдения, имеющие участки наблюдения, обнаруживающие человека, последовательно изменяются от удаленных от дверной панели к более близким к ней. В соответствии с нормативами, обсужденными выше, противоположные концы каждой линии наблюдения находятся на расстоянии 150 мм или более вне соответствующих внешних концов эффективной ширины проема. Соответственно, если человек перемещается вблизи внешних концов линий наблюдения по направлению к стене на любой стороне дверной панели, а не по направлению к ее центру, ее или его ошибочно оценивают приближающимися к дверной панели.
[0006] Задача настоящего изобретения состоит в предоставлении датчика для использования с автоматической дверью, который удовлетворяет условиям нормативов, обсужденных выше, и который не оценивает ошибочно, что человек или объект, не приближающийся к дверной панели, приближается к ней, тем самым можно гарантировать проходимость автоматических дверей уменьшать нагрузку на окружающую среду.
Решение проблемы
[0007] В соответствии с одним вариантом осуществления настоящего изобретения датчик для использования с автоматической дверью содержит обнаруживающие средства. Обнаруживающие средства формируют зоны обнаружения на полу вблизи двери, расположенные двумерным образом. Каждая зона обнаружения может независимо обнаруживать человека или объект при помощи использования инфракрасного света. (В этом описании человек или объект, проходящий дверь или собирающийся пройти через дверь, указан просто как человек). Обнаруживающие средства могут быть сформированы, например, из средств для излучения инфракрасного света и средств для приема инфракрасного света или могут быть сформированы только из средств для приема инфракрасного света. Обнаруживающие средства могут быть установлены на притолоке или на потолке. Каждая зона обнаружения имеет область, равную области проекции человека или объекта на пол или меньшую, чем она. Таким образом, человек или объект одновременно обнаруживаются множеством смежных зон обнаружения, количество которых меньше общего количества зон обнаружения, или одной зоной обнаружения. Поскольку человек или объект перемещаются, различная зона (различные зоны) обнаружения обнаруживает(ют) этого человека или этот объект. Распознающие средства распознают участок, сформированный при помощи зон обнаружения, обнаруживающих человека или объект, из общего количества зон обнаружения. Оценивающие средства оценивают направление, в котором перемещается таким образом распознанный участок. Средства для вывода подают сигнал для открытия двери только тогда, когда направление перемещения распознанного участка является направлением к этой двери.
[0008] Датчик для использования с автоматической дверью, с вышеописанной конфигурацией не оценивает, существует ли человек или объект на линии наблюдения, проходящей параллельно двери, а распознает участок, сформированный одной или множеством зон обнаружения, обнаруживающими человека или объект, и определяет в двух измерениях направление перемещения распознанного участка. Следовательно, никогда не происходит такого, чтобы человек или объект, перемещающийся по направлению к стене возле двери, оценивали в качестве перемещающегося по направлению к двери, и, таким образом, можно уменьшить нагрузку на окружающую среду.
[0009] Оценивающие средства могут быть выполнены с возможностью определения направления перемещения распознанного участка при помощи вычислений на основании центра тяжести этого распознанного участка. Поскольку направление перемещения определено на основе изменения центра тяжести распознанного участка, может быть выполнено правильное определение направления перемещения вне зависимости от изменения во времени формы распознанного участка и количества зон обнаружения, формирующих этот участок.
[0010] Средства для вывода могут быть выполнены с возможностью подачи сигнала для открытия двери, когда на основании центра тяжести распознанного участка и скорости перемещения этого центра тяжести, вычисленной из временного его изменения, может быть спрогнозировано, что этот центр тяжести может пройти сквозь дверной проем в пределах заранее определенного времени. При такой конфигурации можно минимизировать время, в течение которого открыта дверь, а, следовательно, можно дополнительно уменьшить нагрузку на окружающую среду.
[0011] Средства для вывода могут быть выполнены с возможностью обеспечения сигнала для открытия двери, когда центр тяжести распознанного участка останавливается в заранее определенной области близко к двери (т.е. когда центр тяжести можно оценить в качестве по существу остановившегося в течение заранее определенного времени). Кроме того, средства для вывода могут быть выполнены с возможностью обеспечения сигнала для открытия двери, когда центр тяжести распознанного участка находится в заранее определенной области близко к двери (не в течение некоторого периода времени, а в конкретный момент времени). При таких конфигурациях в случаях, когда происходит, направление перемещения человека или объекта что не может быть определено (а это является высоковероятным тогда, когда человек или объект останавливаются или присутствуют в заранее определенной области близко к двери), то можно гарантировать проходимость двери для человека или объекта, собирающегося проходить сквозь эту дверь.
[0012] Заранее определенная область может быть заранее задана в зависимости от ширины дверного проема. При такой конфигурации эта заранее определенная область может быть узкой, но в то же время обеспечивать проходимость двери, и, следовательно, можно предотвратить излишнее открытие и закрытие двери, что приводит к уменьшению нагрузки на окружающую среду.
[0013] Центр тяжести распознанного участка может являться центроидом этого распознанного участка, смещенным по направлению к обнаруживающим средствам на заранее определенное значение. Например, если обнаруживающие средства смонтированы на притолоке двери, где они обращены к полу, может произойти, что зона обнаружения обнаружит тень человека или объекта, сформированную на стороне человека или объекта, противоположной обнаруживающим средствам. Если центроид участка, распознанного при помощи распознающих средств на основании зон обнаружения, содержащих зоны обнаружения, обнаруживающие такую тень, оценивают в качестве центра тяжести распознанного участка, то местоположение человека или объекта не может быть определено правильно. (Например, могут оценить, что он будто бы находится дальше от двери). Это может вызвать задержку операции открытия двери, или дверь может оставаться открытой более долгое время, чем это необходимо. Для того, чтобы избежать влияния тени, в качестве центра тяжести распознанного участка используют центроид распознанного участка, смещенный по направлению к обнаруживающим средствам.
[0014] Центроид распознанного участка могут трактовать в качестве центра тяжести распознанного участка. Например, когда обнаруживающие средства смонтированы на потолке, на систему не оказывается никакого влияния, как описанное выше, и, следовательно, центроид распознанного участка может быть использован в качестве центра тяжести.
[0015] Когда существуют множество распознанных участков, может быть такая конфигурация, что распознающие средства независимо распознают соответствующие участки, оценивающие средства независимо определяют направления, в которых перемещаются распознанные участки, а средства для вывода подают сигнал для открытия двери в случае, если направление любого из независимо распознанных участков является направлениям к указанной двери.
[0016] При такой конфигурации, даже если вблизи двери присутствуют множество человек и/или объектов, то в ответ на перемещение таких людей и/или объектов может быть надлежащим образом выполнено управление закрытием и открытием двери.
Краткое описание чертежей
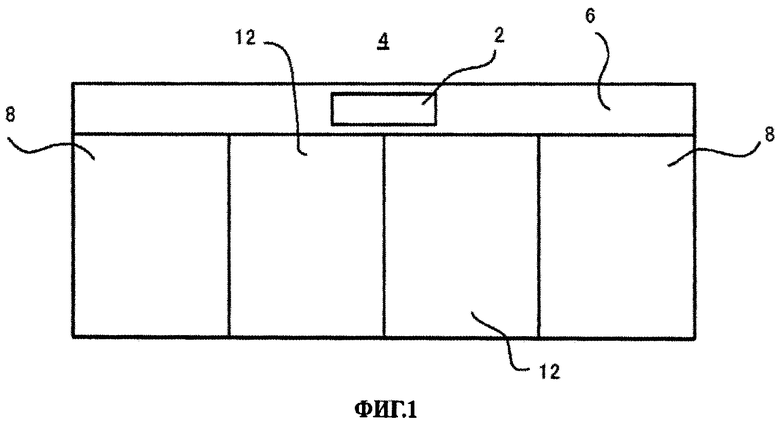
[0017] Фиг.1 представляет собой вид спереди автоматической двери, содержащей датчик для использования с автоматической дверью (здесь и далее упоминаемым, как датчик автоматической двери или просто датчик) в соответствии с вариантом осуществления настоящего изобретения.
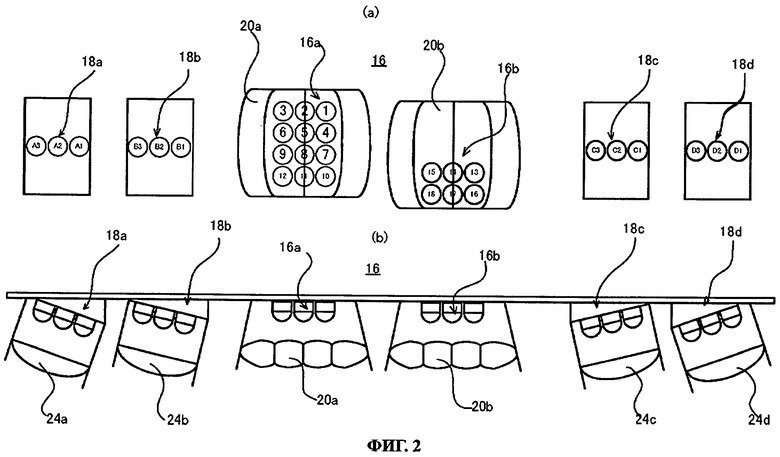
Фиг.2 изображает вид спереди и вид сверху датчика автоматической двери, показанного на фиг.1.
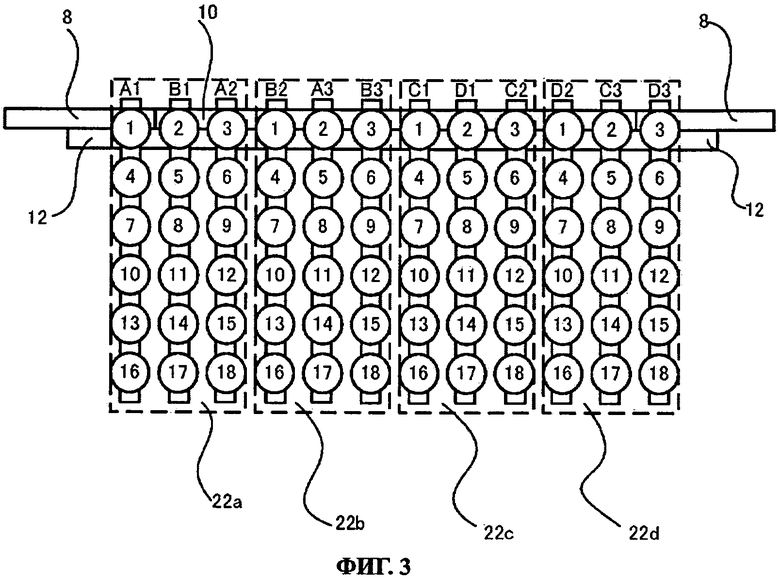
Фиг.3 представляет собой вид сверху, изображающий зоны обнаружения, сформированные датчиком автоматической двери, показанным на фиг.1.
Фиг.4 представляет собой структурную схему датчика автоматической двери, показанного на фиг.1.
Фиг.5 представляет собой основную блок-схему, иллюстрирующую работу датчика автоматической двери, показанного на фиг.1.
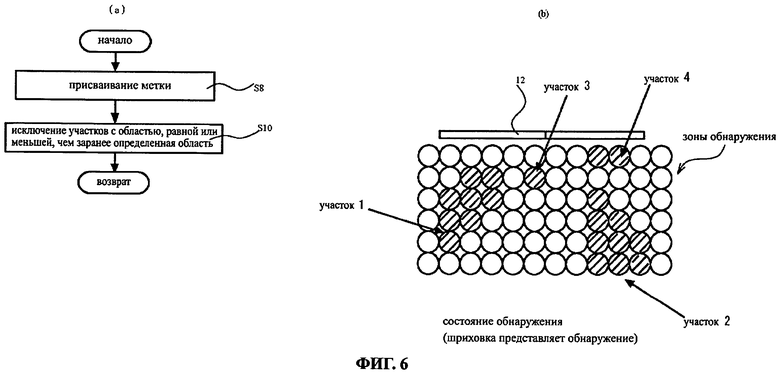
Фиг.6 представляет собой блок-схему, иллюстрирующую обработку, выполненную при помощи средств 30 для распознавания участка, показанных на фиг.4, и объяснение указанной обработки.
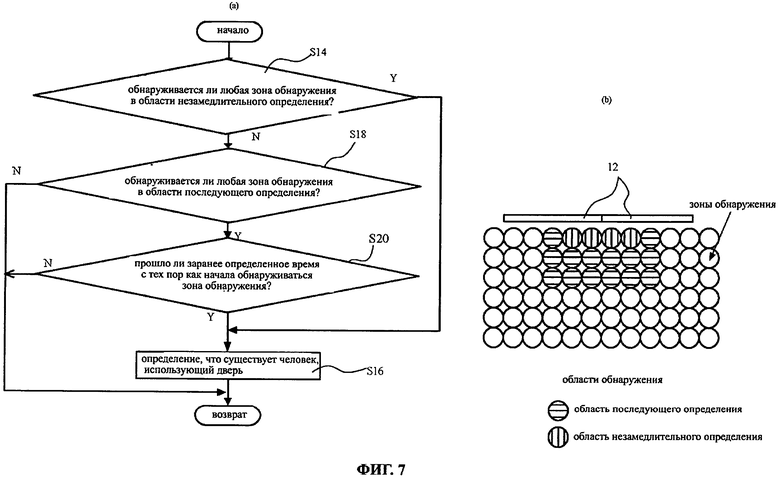
Фиг.7 представляет собой блок-схему, иллюстрирующую обработку, выполненную при помощи средств 32 для определения зон, показанных на фиг.4, и объяснение указанной обработки.
Фиг.8 представляет собой блок-схему, иллюстрирующую обработку, выполненную при помощи средств 36 для уточнения местоположения участка, показанных на фиг.4, и объяснение указанной обработки.
Фиг.9 представляет собой блок-схему, иллюстрирующую обработку, выполненную при помощи другого примера 1 средств 36 для уточнения местоположения участка, и объяснение указанной обработки.
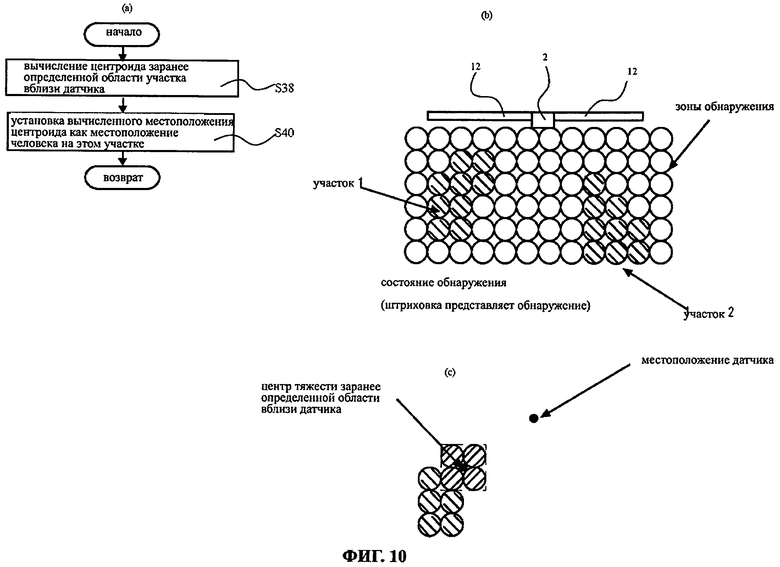
Фиг.10 представляет собой блок-схему, иллюстрирующую обработку, выполненную при помощи еще одного примера 2 средств 36 для уточнения местоположения участка, и объяснение указанной обработки.
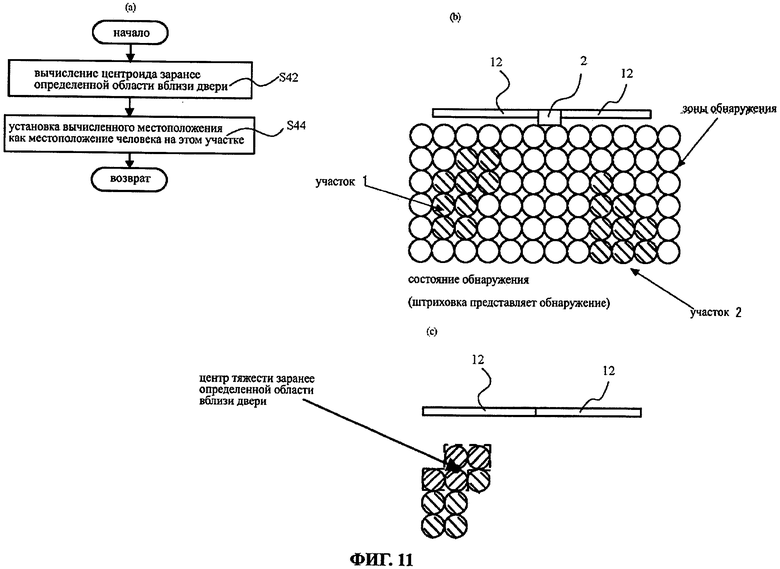
Фиг.11 представляет собой блок-схему, иллюстрирующую обработку, выполненную при помощи еще одного примера 3 средств 36 для уточнения местоположения участка, и объяснение указанной обработки.
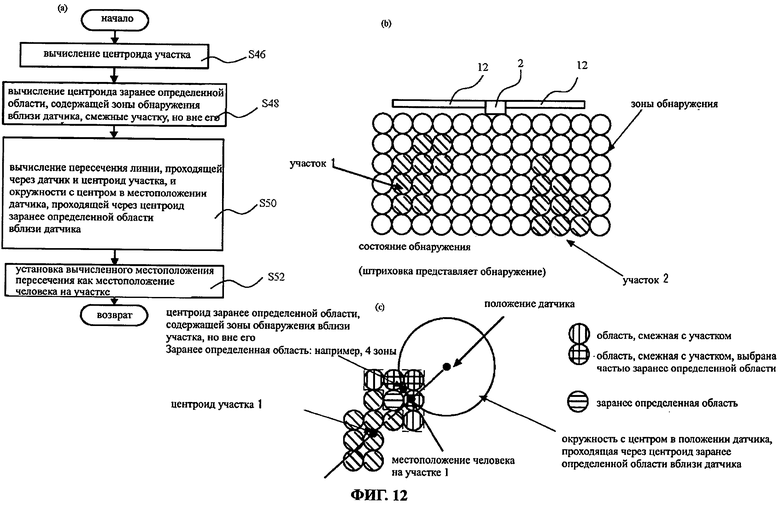
Фиг.12 представляет собой блок-схему, иллюстрирующую обработку, выполненную при помощи еще одного примера 4 средств 36 для уточнения местоположения участка, и объяснение указанной обработки.
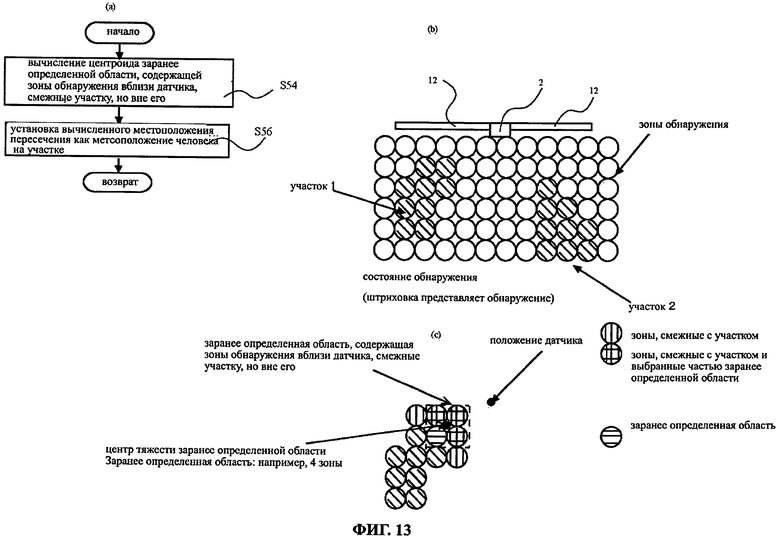
Фиг.13 представляет собой блок-схему, иллюстрирующую обработку, выполненную при помощи еще одного примера 5 средств 36 для уточнения местоположения участка, и объяснение указанной обработки.
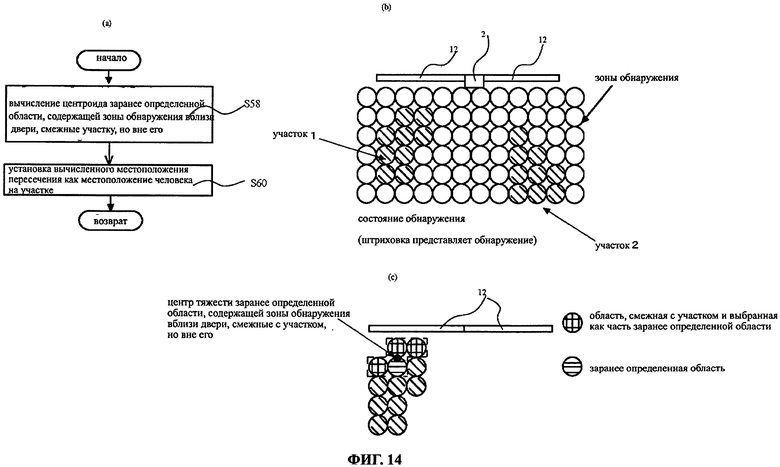
Фиг.14 представляет собой блок-схему, иллюстрирующую обработку, выполненную при помощи еще одного примера 6 средств 36 для уточнения местоположения участка, и объяснение указанной обработки.
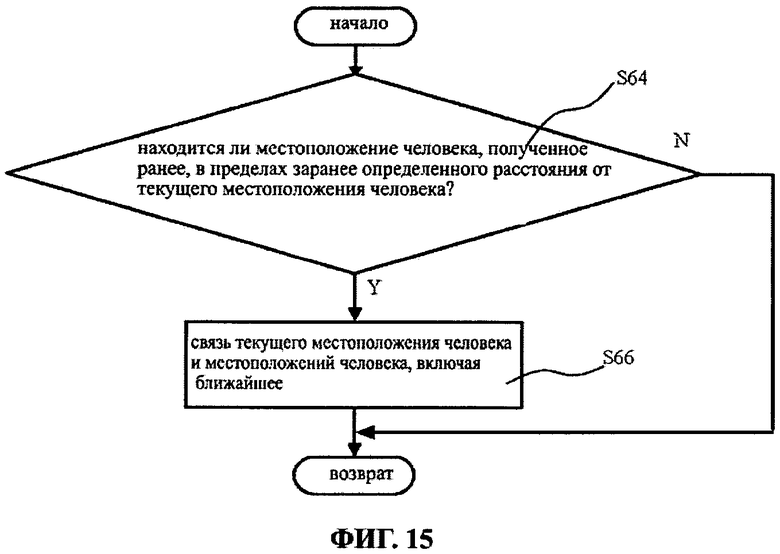
Фиг.15 представляет собой блок-схему, иллюстрирующую обработку, выполненную при помощи средств 38 для идентификации человека, изображенных на фиг.4.
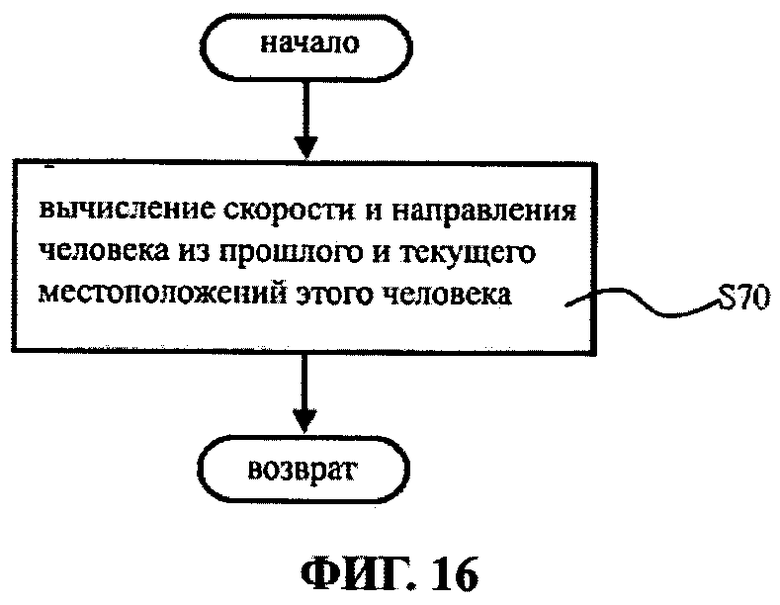
Фиг.16 представляет собой блок-схему, иллюстрирующую обработку, выполненную при помощи средств 40 для вычисления скорости человека, изображенных на фиг.4.
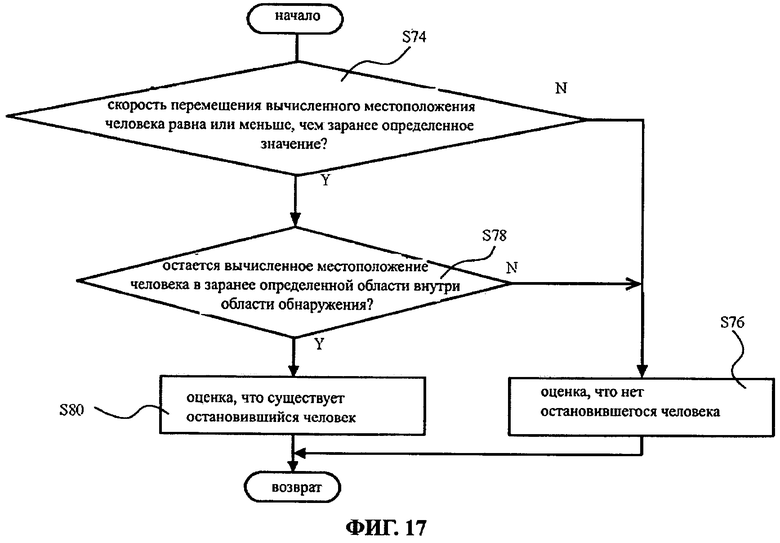
Фиг.17 представляет собой блок-схему, иллюстрирующую обработку, выполненную при помощи средств 42 для оценки остановки человека, изображенных на фиг.4.
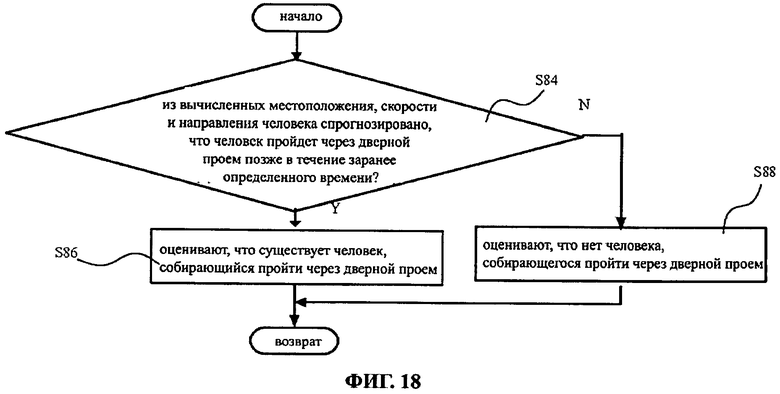
Фиг.18 представляет собой блок-схему, иллюстрирующую обработку, выполненную при помощи средств 44 для оценки перемещения человека, изображенных на фиг.4.
Осуществление изобретения
[0018] В соответствии с первым вариантом осуществления настоящего изобретения датчик для использования с автоматической дверью смонтирован на притолоке 6 автоматической двери 4, как показано на фиг.1. Автоматическая дверь 4 содержит дверные панели 12, 12, посредством которых открывают и закрывают дверной проем 10 (см. фиг.3), сформированный между неподвижными стенами 8, 8, разделенными друг от друга. Дверные панели 12, 12 закрывают дверной проем 10 при помощи сдвига от соответствующих местоположений на сторонах неподвижных стен 8 по направлению к центру дверного проема, и открывают дверной проем 10 при помощи сдвига от местоположений на сторонах центра дверного проема по направлению к неподвижным стенам 8, 8.
[0019] Как изображено на фиг.4, датчик 2 автоматической двери содержит обнаруживающий блок 14, который содержит светоизлучающие средства, например, светоизлучающий блок 16, и светопринимающие средства, например, светопринимающий блок 18. Светоизлучающий блок 16 содержит два световых излучателя 16a и 16b, расположенные на одной линии и разделенные друг от друга вдоль направления, в котором открываются и закрываются дверные панели 12, 12. Световые излучатели 16a и 16b излучают свет, например, близкий к инфракрасному свету, пульсирующему с заранее определенной частотой. Световой излучатель 16a содержит матрицу из двенадцати светоизлучающих устройств (указанных при помощи позиционных обозначений 1-12, обведенных кружками, на фиг.2a), сформированную линиями, каждая из которых содержит три светоизлучающих устройства, расположенные вдоль направления перемещения дверных панелей 12, 12 и столбцами, каждый из которых содержит четыре светоизлучающих устройства, расположенные по высоте дверных панелей 12, 12. Световой излучатель 16b содержит шесть светоизлучающих устройств (указанных при помощи позиционных обозначений 13-18, обведенных кружками, на фиг.2a), сформированную линиями, каждая из которых содержит три светоизлучающих устройства, расположенные вдоль направления перемещения дверных панелей 12, 12 и столбцами, каждый из которых содержит два светоизлучающих устройства, расположенные по высоте дверных панелей 12, 12. Светоизлучающие устройства с позиционными обозначениями 13-15 светового излучателя 16b размещены немного ниже, чем светоизлучающие устройства с позиционными обозначениями 7-9 светового излучателя 16a, а светоизлучающие устройства с позиционными обозначениями 16-18 светового излучателя 16b размещены немного ниже, чем светоизлучающие устройства с позиционными обозначениями 10-12 светового излучателя 16a.
[0020] Перед соответствующими световыми излучателями 16a и 16b расположены множество (два в этом варианте осуществления изобретения) оптических устройств, соответствующие количеству световых излучателей 16a и 16b, например, сегментные линзы 20a и 20b. Каждая из сегментных линз 20a и 20b разделена на четыре сегмента, оптические оси которых расположены под различными углами относительно направления вдоль ширины дверного проема (т.е. направления перемещения дверных панелей 12, 12). В результате, как показано на фиг.3, на опорной плоскости, например, на поверхности пола, с помощью света от восемнадцати светоизлучающих устройств световых излучателей 16a и 16b сформированы четыре области обнаружения 22a-22d. Каждая из областей обнаружения 22a-22d состоит из восемнадцати зон обнаружения. Кружки в областях обнаружения 22a-22d, изображенные на фиг.3, являются зонами обнаружения, а позиционные обозначения в каждой области обнаружения представляют светоизлучающие устройства, излучающие свет, который формирует указанные зоны обнаружения. Сформированы семьдесят две зоны обнаружения, расположенные по двенадцать зон обнаружения вдоль ширины дверного проема на шесть зон обнаружения по линиям в направлении, перпендикулярном указанным двенадцати зонам обнаружения на полу. Каждая из зон обнаружения имеет примерно такой же размер, как и область тени человека или объекта, который возможно проходит через области обнаружения 22a-22d, или имеет меньший размер, чем указанная область тени. Области обнаружения 22a-22d расположены по линии вдоль ширины дверного проема и проходят перпендикулярно высоте дверных панелей 12, 12 и ширине дверного проема.
[0021] Как изображено на фиг.2, два из светоприемников 18a-18d светопринимающего блока 18 размещены на противоположных сторонах светоизлучающего блока 16, каждый на линии вдоль ширины дверного проема. Каждый из светоприемников 18a-18d содержит три светопринимающих устройства, расположенных по линии вдоль ширины дверного проема. На фиг.2a ссылочные обозначения A1-A3, расположенные в кружках, представляют светопринимающие устройства светоприемника 18a, ссылочные обозначения B1-B3, расположенные в кружках, представляют светопринимающие устройства светоприемника 18b, ссылочные обозначения C1-C3, расположенные в кружках, представляют светопринимающие устройства светоприемника 18c, а ссылочные обозначения D1-D, расположенные в кружках, представляют светопринимающие устройства светоприемника 18d. Общее количество светопринимающих устройств двенадцать, что равно количеству вышеописанных зон обнаружения, расположенных по линии вдоль ширины дверного проема.
[0022] Перед соответствующими светоприемниками 18a-18d расположены оптические устройства, например, цилиндрические линзы 24a-24d. Каждая из цилиндрических линз 24a-24d работает для сбора света из различных местоположений по ширине дверного проема к одному и тому же светоприемнику. Благодаря работе цилиндрической линзы 24a свет, отраженный от шести зон обнаружения, изображенных на фиг.3 внутри блока со ссылочным обозначением A1, падает на светопринимающее устройство A1. Аналогично, свет, отраженный от шести зон обнаружения, изображенных на фиг.3 внутри блока со ссылочным обозначением A2, благодаря работе цилиндрической линзы 24a падает на светопринимающее устройство A2. Свет, отраженный от шести зон обнаружения, изображенных на фиг.3 внутри блока со ссылочным обозначением A3, благодаря работе цилиндрической линзы 24a падает на светопринимающее устройство A3. Подобным образом, каждая из цилиндрических линз 24b-24d обеспечивает падение на соответствующее светопринимающее устройство B1-D3 света, отраженного от шести зон обнаружения, изображенных на фиг.3 внутри блока с соответствующим ссылочным обозначением B1-D3. Зоны обнаружения расположены с такой плотностью, что не должно существовать такого участка, где объект не может быть обнаружен. Область, на которую простирается каждая область обнаружения, состоящая из зон обнаружения, при закрытой двери, может отличаться от области при открытой двери, только в случае, если соблюдены указанные нормативы по меньшей мере при открытой двери.
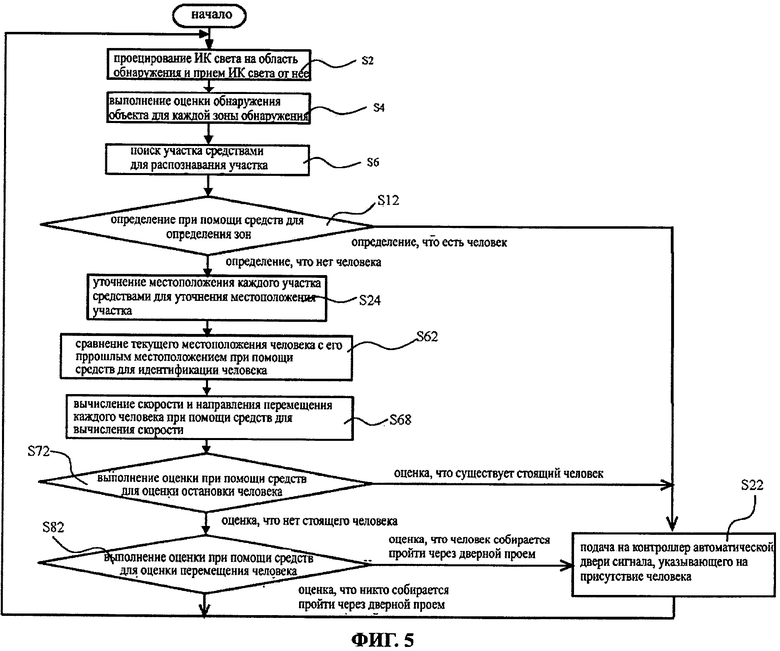
[0023] Средства 26 для обнаружения объекта обнаруживающего блока 14 управляют светоизлучающим блоком 16 и светопринимающим блоком 18 таким образом, как изображено на фиг.5, что свет проектируется на соответствующие области 22a-22d и принимается от них (этап S2).
[0024] В частности, восемнадцать светоизлучающих устройств световых излучателей 16a и 16b повторяют последовательно излучение света, в каждый момент времени работает один излучатель в режиме временного разделения. Другими словами, светоизлучающие устройства со ссылочными номерами 1-18, присоединенные, как показано на фиг.2, повторяют излучение света один за другим, в каждый момент времени работает одно из светоизлучающих устройств 1-18. Синхронно с излучением света восемнадцатью светоизлучающими устройствами световых излучателей 16a и 16b, светопринимающие устройства A1-D3 светоприемников 18a и 18d последовательно способны поочередно принимать свет от светопринимающих устройств A1-B1, A2, B2, A3, B3, C1, D1, C2, D2, и C3-D3. Это последовательное включение повторяется.
[0025] Затем первое светопринимающее устройство A1 принимает свет, отраженный от зоны обнаружения со ссылочным номером 1, присоединенной к нему в области 22a обнаружения, светопринимающее устройство B1 принимает свет, отраженный от зоны обнаружения со ссылочным номером 2, присоединенной к нему в области 22a обнаружения, а светопринимающее устройство A2 принимает свет, отраженный от зоны обнаружения со ссылочным номером 3, присоединенной к нему в области 22a обнаружения. После чего светопринимающее устройство B2 принимает свет, отраженный от зоны обнаружения со ссылочным номером 1, присоединенной к нему в области 22b обнаружения, светопринимающее устройство A3 принимает свет, отраженный от зоны обнаружения со ссылочным номером 2, присоединенной к нему в области 22b обнаружения, а светопринимающее устройство B3 принимает свет, отраженный от зоны обнаружения со ссылочным номером 3, присоединенной к нему в области 22b обнаружения. Светопринимающее устройство C1 принимает свет, отраженный от зоны обнаружения со ссылочным номером 1, присоединенной к нему в области 22c обнаружения, светопринимающее устройство D1 принимает свет, отраженный от зоны обнаружения со ссылочным номером 2, присоединенной к нему в области 22c обнаружения, а светопринимающее устройство C2 принимает свет, отраженный от зоны обнаружения со ссылочным номером 3, присоединенной к нему в области 22c обнаружения. Затем, светопринимающее устройство D2 принимает свет, отраженный от зоны обнаружения со ссылочным номером 1, присоединенной к нему в области 22d обнаружения, светопринимающее устройство C3 принимает свет, отраженный от зоны обнаружения со ссылочным номером 2, присоединенной к нему в области 22d обнаружения, а светопринимающее устройство D3 принимает свет, отраженный от зоны обнаружения со ссылочным номером 3, присоединенной к нему в области 22d обнаружения.
[0026] Светопринимающее устройство A1 снова принимает свет, отраженный от зоны обнаружения со ссылочным номером 4, присоединенной к нему в области 22a обнаружения, светопринимающее устройство B1 принимает свет, отраженный от зоны обнаружения со ссылочным номером 5, присоединенной к нему в области 22a обнаружения, а светопринимающее устройство A2 принимает свет, отраженный от зоны обнаружения со ссылочным номером 6, присоединенной к нему в области 22a обнаружения. Далее, светопринимающее устройство B2 принимает свет, отраженный от зоны обнаружения со ссылочным номером 4, присоединенной к нему в области 22b обнаружения, светопринимающее устройство A3 принимает свет, отраженный от зоны обнаружения со ссылочным номером 5, присоединенной к нему в области 22b обнаружения, а светопринимающее устройство B3 принимает свет, отраженный от зоны обнаружения со ссылочным номером 6, присоединенной к нему в области 22b обнаружения. Светопринимающее устройство C1 принимает свет, отраженный от зоны обнаружения со ссылочным номером 4, присоединенной к нему в области 22c обнаружения, светопринимающее устройство D1 принимает свет, отраженный от зоны обнаружения со ссылочным номером 5, присоединенной к нему в области 22c обнаружения, а светопринимающее устройство C2 принимает свет, отраженный от зоны обнаружения со ссылочным номером 6, присоединенной к нему в области 22c обнаружения. Затем, светопринимающее устройство D2 принимает свет, отраженный от зоны обнаружения со ссылочным номером 4, присоединенной к нему в области 22d обнаружения, светопринимающее устройство C3 принимает свет, отраженный от зоны обнаружения со ссылочным номером 5, присоединенной к нему в области 22d обнаружения, а светопринимающее устройство D3 принимает свет, отраженный от зоны обнаружения со ссылочным номером 6, присоединенной к нему в области 22d обнаружения.
[0027] Аналогичным образом повторяется прием света, отраженного от семидесяти двух зон обнаружения светопринимающими устройствами A1-D3 в светоприемниках 18a-18d.
[0028] Далее, средства 26 для обнаружения объекта выполняют оценку обнаружения объекта (этапы S4) для каждой зоны обнаружения. Если по меньшей мере в одной из областей 22a-22d обнаружения находится человек, свет, спроецированный на множество или одну из прилегающих зон обнаружения, отражается или поглощается этим человеком, и, следовательно, количество света, принятое светопринимающими устройствами A1-D3 отличается от света, принятого в отсутствие человека. При помощи сравнения в средствах 26 для обнаружения объекта этого полученного количества принятого света с заранее определенным пороговым значением можно оценить, в которой зоне или которых зонах обнаружения обнаружен человек. Полученная информация обнаружения подается на арифметический блок 28. Арифметический блок 28 и средства 26 для обнаружения объекта могут быть реализованы при помощи, например, центрального процессора и средств для хранения, например, запоминающего устройства, сохраняющих программ, подлежащих исполнению этим центральным процессором.
[0029] Далее, средства 30 для распознавания участка в арифметическом блоке 28 находят участок, обнаруживающий объект (этап S6). В частности, как изображено на фиг.6a, выполнено присваивание метки (этап S8). На этапе присваивания метки одинаковую метку присоединяют ко всем взаимно связанным зонам обнаружения из общего количества зон обнаружения, которые были оценены обнаруживающими человека, а ко всем другим взаимно связанным зонам обнаружения присоединяют другую метку, как показано на фиг.6b. На фиг.6b участок 1, участок 2, участок 3 и участок 4 являются четырьмя взаимно связанными зонами обнаружения, полученными при помощи присваивания меток. Далее, исключают участки, содержащие область, равную заранее определенной области или меньшую, чем она (т.е. участки, содержащие зоны обнаружения в равном или меньшем количестве, чем заранее определенное количество) (этап S10). Причина, по которой исключают участки с областью, равной заранее определенной области или меньшей, чем она, состоит в том, что вероятность, что в них не обнаружен человек, является высокой. Когда указанная заранее определенная область установлена размером в три зоны обнаружения, например, исключают участок 3, имеющий область в одну зону обнаружения, и участок 4, имеющий область в две зоны обнаружения, а участки 1 и 2 распознают в качестве обнаруживающих объект. Когда обработка на этапе S10 закончена, то завершают обработку распознавания участка.
[0030] Далее, средства 32 для определения зон в арифметическом блоке 28 выполняют определение, существует человек или нет, для каждого из распознанных участков (этап S12). В частности, множество, например четыре, прилегающих зоны обнаружения, ближайшие к центру дверных панелей 12, 12 заранее определены в качестве областей незамедлительного определения, для которых указанное определение должно быть выполнено незамедлительно, а также заранее определено множество областей последующего определения, окружающих указанные области незамедлительного определения. См. фиг.7b. Затем, выполняется определение, принадлежит участку, распознанному при помощи средств 30 для распознавания участка, по меньшей мере одна из зон обнаружения в области незамедлительного определения, или нет (этап S14). Если это определение является положительным, можно предполагать, что человек находится в местоположении, близком к дверным панелям 12, 12, то есть этот человек ожидает открытия двери, и, следовательно, оценивают, что существует человек, собирающийся пройти через дверь (этап S16). Если определение, выполненное на этапе S14, является отрицательным, то выполняется определение, принадлежит участку, распознанному при помощи средств 30 для распознавания участка, по меньшей мере одна из зон обнаружения в области последующего определения, или нет (этап S18). Если определение, выполненное на этапе S18, является отрицательным, то можно оценить, что человек не находится ни в области незамедлительного определения, ни в области последующего определения, а обработку определения зон завершают. Если определение, выполненное на этапе S18, является положительным, тогда оценивают, прошло ли заранее определенное время с того момента, как указанная зона обнаружения в области последующего определения стала принадлежать участку, распознанному при помощи средств 30 для распознавания участка (этап S20). Если оценка, выполненная на этапе S20, является положительной, то можно оценить, что существует человек, стоящий около дверных панелей 12 в течение заранее определенного времени, и, следовательно, на этапе S16 оценивают, что существует человек, намеревающийся пройти через дверь. Затем обработку определения зон завершают.
[0031] Когда средства 32 для определения зон вышеописанным способом оценивают, что существует человек, собирающийся пройти через дверной проем, арифметический блок 28 подает сигнал, указывающий на присутствие человека, на дверной контроллер 34 (этап S22). Это вызывает открытие дверных панелей 12, 12. После завершения этапа S22 снова выполняют этап S2. Этап S22 является средствами для вывода.
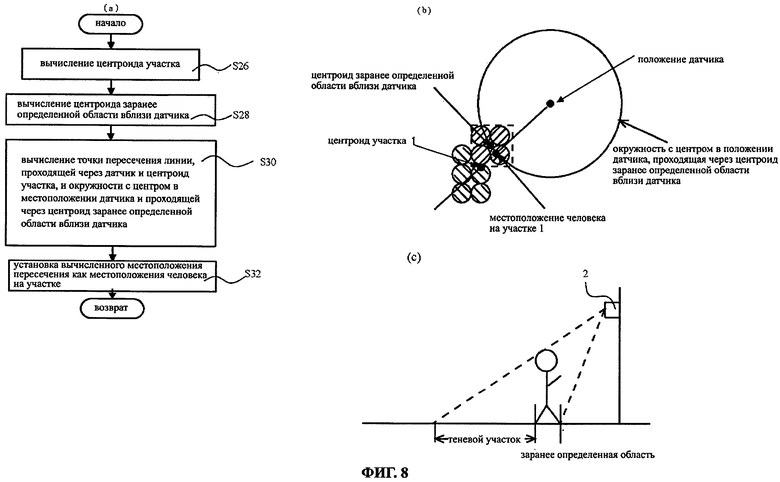
[0032] Если средства 32 для определения зон оценивают, что человека нет, средства 36 для уточнения местоположения участка в арифметическом блоке 28 уточняют местоположения каждого участка (этап S24). В частности, как показано на фиг.8a, вычисляют центроид каждого участка (этап S26). Например, вычисляют центроид каждой зоны обнаружения, формирующей участок 1, как показано на фиг.8b. Далее, вычисляют центроид заранее определенной области на каждом участке вблизи датчика 2 автоматической двери (этап S28). Например, предположим, что заранее определенная область равна области четырех зон обнаружения, вычисляют местоположение центроида четырех зон обнаружения, близких к датчику 2 автоматической двери на участке 1 (т.е. четырех зон обнаружения на участке, заданном посредством пунктирной линии на фиг.8b). Далее, как показано на фиг.8b, проводят прямую линию, соединяющую датчик 2 автоматической двери с центроидом участка, например, участка 1. Далее, рисуют окружность с центром в местоположении датчика 2 автоматической двери и с радиусом, равным расстоянию между датчиком 2 автоматической двери и центроидом заранее определенного участка и вычисляют точку пересечения указанных окружности и прямой линии (этап S30). Местоположение этой точки пересечения устанавливают в качестве местоположения указанного человека (этап S32). Таким образом, местоположение, смещенное по направлению к датчику 2 автоматической двери от центроида участка 1, устанавливают в качестве местоположения человека или центра тяжести указанного участка. Для других участков проводят аналогичную обработку.
[0033] Когда датчик 2 автоматической двери смонтирован на притолоке 6, как показано на фиг.6c, светоизлучающий блок 16 и светопринимающий блок 19 расположены наклонно обращенными к поверхности пола, и, следовательно, участок, распознанный при помощи средств 30 для распознавания участка, содержит тень, сформированную на стороне, противоположной датчику 2 автоматической двери. Если вычисленный центроид участка, содержащего тень, был установлен в качестве местоположения человека, то установка местоположения человека будет содержать ошибку (т.е. ошибку, вызванную установкой в качестве местоположения человека такого местоположения, которое находится дальше от датчика 2 автоматической двери, чем истинное местоположение человека). Для того чтобы избежать этого, заранее определенную область, обсужденную выше, устанавливают в местоположении вблизи датчика 2 автоматической двери внутри участка, уточненного при помощи средств 36 для уточнения местоположения участка, на основании размера человека, предполагаемого обыкновенным размером, и, потом определяют центроид этой заранее определенной области. Однако может произойти так, что направление датчика 2 автоматической двери, наблюдаемое от указанной заранее определенной области, отличается от указанного направления, наблюдаемого от человека. Однако, направление датчика 2 автоматической двери, наблюдаемое от участка, содержащего тень человека, совпадает с направлением датчика 2 автоматической двери, наблюдаемым от человека, намеревающегося пройти через дверь, как это является понятным из фиг.8b. Следовательно, в соответствии с рассмотренной конфигурацией положение центроида заранее определенной области смещено к линии, соединяющей участок, содержащий тень человека, и датчик 2 автоматической двери, в результате чего можно гарантировать правильное направление по отношению к датчику 2 автоматической двери. В описанной конфигурации размер заранее определенной области является областью, состоящей из четырех зон обнаружения, которые были определены на основании обыкновенного размера человека, собирающегося использовать дверь, а центроид этих четырех зон обнаружения вычисляют в процессе обработки для гарантии стабильности положения на основе усреднения. Однако, вычисление центроида зон обнаружения, отличных от четырех, может быть использовано только тогда, когда оно связано с местоположением человека.
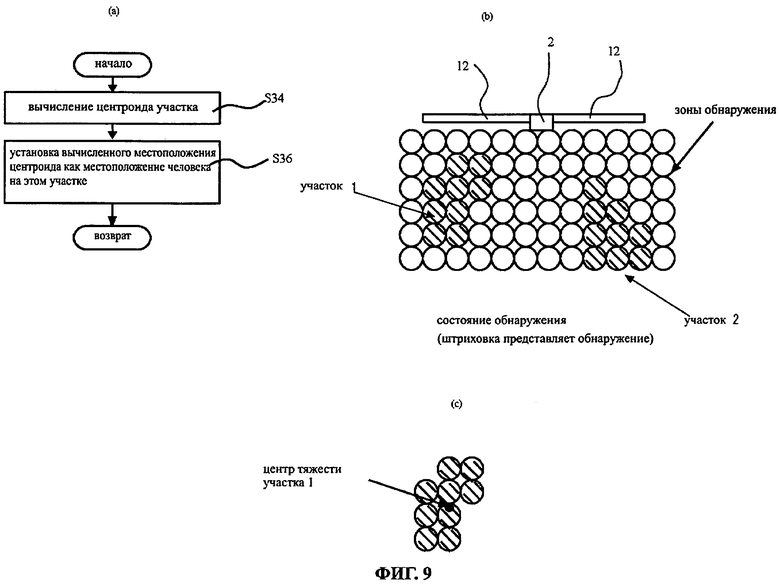
[0034] На фиг.9a-9c показан другой пример 1 средств 36 для уточнения местоположения участка. Средства 36 для уточнения местоположения участка примера 1 используют для датчика 2 автоматической двери, смонтированного на потолке, где на распознанном участке не содержится тень, описанная со ссылкой на фиг.8. Следовательно, в этом случае выполняют вычисление центроида для участка, как показано на фиг.9a (этап S34). На фиг.9c показан центр тяжести участка 1. В этом случае центр тяжести участка 1 совпадает с центроидом участка 1. Затем, вычисленное местоположение центроида устанавливают в качестве местоположения человека на указанном участке (этап S36). Когда распознают множество участков, как показано на фиг.9b, для всех этих участков выполняют обработку этапов S34 и S36.
[0035] На фиг.10a-10c показан другой пример 2 средств 36 для уточнения местоположения участка. Средства 36 для уточнения местоположения участка примера 2 используют, когда датчик 2 автоматической двери смонтирован на притолоке 6. Вычисляют центроид заранее определенной области каждого участка вблизи датчика 2 автоматической двери (этап S38). Предположив, что заранее определенная область является областью, состоящей из четырех зон обнаружения, вычисляют местоположение центроида этих зон обнаружения вблизи датчика 2 автоматической двери на Участке 1 (т.е. четырех зон обнаружения внутри квадрата, изображенного пунктирной линией на фиг.10c), и таким образом вычисленное местоположение центроида устанавливают в качестве местоположения человека (этап S40). Как было объяснено выше со ссылкой на фиг.8, указанную заранее определенную область определяют на основании размера человека, и, следовательно, существует высокая вероятность, что центр тяжести этой заранее определенной области находится вблизи местоположения человека (т.е. местоположения центра тяжести этого человека). Таким образом, местоположение человека на участке могут вычислять относительно точно и просто. Когда распознают множество участков, как показано на фиг.10b, вышеописанную обработку выполняют для каждого из этих участков.
[0036] На фиг.11a-11c показан пример 3 средств 36 для уточнения местоположения участка. Когда используют эти средства для уточнения местоположения участка, датчик 2 автоматической двери смонтирован на притолоке 6. Вместо центроида заранее определенной области вблизи датчика 2 автоматической двери на каждом участке вычисляют центроид заранее определенной области вблизи дверных панелей 12, 12, показанных в квадрате, изображенном пунктирными линиями на фиг.11c (этап S42). Заранее определенную область определяют на основании размера человека, и, следовательно, существует высокая вероятность, что местоположение центроида заранее определенной области находится вблизи местоположения человека (т.е. местоположения центра тяжести этого человека). Дополнительно, поскольку оценку выполняют с учетом местоположения двери (т.е. дверной панели), это вычисление является простым и нетрудным, и все еще возможно вычислять относительно точно местоположение человека на участке. Когда распознают множество участков, как показано на фиг.11b, обработку этапов S42 и S44 выполняют для всех этих участков.
[0037] На фиг.12a-12c показан другой пример 4 средств 36 для уточнения местоположения участка. Когда используют эти средства 36 для уточнения местоположения участка, датчик 2 автоматической двери находится на притолоке 6. В этих средствах 36 для уточнения местоположения участка также вычисляют центроид каждого участка, как показано на фиг.12a (этап S46). Затем вычисляют центроид заранее определенной области, обозначенной при помощи квадрата, изображенного пунктирной линией на фиг.12c, и содержащей зоны обнаружения, расположенные близко к датчику 2 автоматической двери и рядом с интересующим участком, но вне его (этап S48). Далее, как показано на фиг.12c, проводят прямую линию, соединяющую датчик 2 автоматической двери с центроидом участка, например, участка 1, рисуют окружность с центром в местоположении датчика 2 автоматической двери и радиусом, равным расстоянию R между датчиком 2 автоматической двери и центроидом этой заранее определенной области, и вычисляют точку пересечения указанных окружности и прямой линии (этап S50).
[0038] Принцип вычисления местоположения человека в общем является тем же самым, что и в случае, изображенном на фиг.8, но, даже когда чувствительность зоны обнаружения более низкая по сравнению со случаем на фиг.8, дверь может быть открыта надлежащим образом, поскольку местоположение центроида заранее определенной области вычисляют при зонах обнаружения, содержащихся в заранее определенной области, но не содержащихся на участке, взятом для этого вычисления. Когда распознают множество участков, как показано на фиг.12b, обработку этапов S46, S48, S50 и S52 выполняют для всех этих участков.
[0039] На фиг.13a-13c показан другой пример 5 средств 36 для уточнения местоположения участка. Когда используют эти средства 36 для уточнения местоположения участка, датчик 2 для использования с автоматической дверью смонтирован на притолоке 6. Подобно изображенным на фиг.10, в этих средствах 36 для уточнения местоположения участка также вычисляют центроид заранее определенной области вблизи датчика 2 автоматической двери на каждом участке (этап S54). Заранее определенная область, как показана на фиг.13c в квадрате, изображенном пунктирной линией, содержит зоны обнаружения, смежные с участком, но находящиеся вне его. Вычисленное местоположение центроида заранее определенной области устанавливают в качестве местоположения человека на участке (этап S56). В такой конфигурации даже когда понижена чувствительность зон обнаружения, или, другими словами, даже когда заранее определенное пороговое значение в средствах 26 для обнаружения объекта повышено по сравнению со случаем на фиг.10, дверь может быть открыта и закрыта надлежащим образом, поскольку вычисляют местоположение центроида заранее определенной области при зонах обнаружения, содержащихся в этой заранее определенной области, но не содержащихся на участке, взятом для этого вычисления. Причина снижения чувствительности состоит в том, чтобы затруднить обнаружение людей в качестве мер противодействия против шума. Здесь следует отметить, что, как показано на фиг.13b, когда распознают множество участков, обработку этапов S54 и S56 выполняют для всех этих участков.
[0040] На фиг.14a-14c показан другой пример 6 средств 36 для уточнения местоположения участка. Когда используют эти средства 36 для уточнения местоположения участка, датчик 2 автоматической двери смонтирован на притолоке 6. Подобно изображенным на фиг.11, в средствах 36 для уточнения местоположения участка этого примера вычисляют центроид заранее определенной области на участке вблизи двери (этап S58). Заранее определенная область содержит зоны обнаружения, близкие к дверным панелям 12, 12 и смежные с указанным участком, но находящиеся вне его, как показано в рамке из пунктирных линий на фиг.14c. Затем, вычисленное местоположение центроида устанавливают в качестве местоположения человека на этом участке (этап S60). При такой конфигурации, поскольку местоположение центроида заранее определенной области вычисляют при зонах обнаружения, содержащихся в заранее определенной области, но не содержащихся на участке, взятом для этого вычисления, дверь может быть открыта и закрыта надлежащим образом, даже если чувствительность зон обнаружения понижена относительно случая с фиг.11. Здесь следует отметить, что, как показано на фиг.14b, когда распознают множество участков, обработку этапов S58 и S60 выполняют для всех этих участков.
[0041] После уточнения местоположения человека при помощи средств 36 для уточнения местоположения участка вышеописанным способом средства 38 для идентификации человека в арифметическом блоке соотносят текущее местоположение человека с прошлым местоположением человека, как показано на фиг.5 (этап S62). В частности, как показано на фиг.15, оценивают, находится ли местоположение человека, полученное ранее, в пределах заранее определенного расстояния от текущего местоположения человека, как показано на фиг.15 (этап S64). Если оценка - НЕТ, то обработку завершают, и, хотя это не показано, выполняют снова этап S2. Если оценка, выполненная на этапе S64, является положительной, то местоположения человека, включающие его местоположение, являющееся ближайшим к текущему местоположению, связывают с текущим местоположением человека и завершают обработку (этап S66). В случае, когда уточнены множество местоположений человека, указанное соотнесение выполняют для каждого из этих местоположений.
[0042] После этой обработки соотнесения средства 40 для вычисления скорости человека в арифметическом блоке 28 вычисляют скорость и направление перемещения каждого человека (этап S68). В частности, скорость и направление перемещения интересующего человека вычисляют на основе прошлого местоположения интересующего человека и его текущего местоположении, как показано на фиг.16 (этап S70).
[0043] После вычисления этим способом скорости и направления перемещения человека, средства 42 для оценки остановки человека в арифметическом блоке 28 оценивают, продолжает стоять человек или нет, как показано на фиг.5 (этап S72). В частности, как показано на фиг.17, оценивают, является ли вычисленная скорость перемещения равной или меньшей, чем заранее определенное значение (этап S74). Если эта оценка является отрицательной, то оценивают, что стоящего человека нет (этап S76), и завершают обработку. Если оценка, выполненная на этапе S74, - ДА, существует вероятность, что присутствует стоящий человек, и, следовательно, вычисленное местоположение человека находится в заранее определенной области внутри области обнаружения, например, вблизи дверных панелей 12, 12 в течение более, чем заранее определенный период времени (этап S78). Эта заранее определенная область определена на основании ширины дверного проема 10 и может содержать область последующего определения и область незамедлительного определения, обсужденные выше. Если оценка, выполненная на этапе S78, - ДА, то оценивают, что существует стоящий человек (этап S80), и завершают обработку. Если оценка, выполненная на этапе S78, является отрицательной, то выполняют этап S76 и оценивают, что стоящего человека нет.
[0044] Если на этапе S72 оценили, что стоящий человек есть, т.е. существует высокая вероятность, что существует человек, имеющий намерение пройти через дверной проем 10, то выполняют этап 22 и подают на контроллер 34 автоматической двери сигнал, указывающий на присутствие человека, ожидающего прохода через дверной проем 10. Соответственно, если человек стоит в местоположении, находящемся вне заранее определенной области, например, местоположении, отличающемся от местоположения вблизи дверных панелей 12, 12, то оценивают, что нет людей, имеющих намерение пройти через дверной проем 10, а дверные панели 12, 12 никогда не открываются, тем самым уменьшая нагрузку на окружающую среду.
[0045] Если на этапе S72 оценивают, что остановившихся людей нет, то средства 44 для оценки перемещения человека в арифметической блоке выполняют оценку, есть ли перемещающийся человек (этап S82). В частности, как показано на фиг.18, оценивают исходя из вычисленного местоположения человека и скорости и направления его перемещения, существует ли вероятность прохода интересующего человека через дверной проем позже в течение заранее определенного времени (этап S84). Если эта оценка - ДА, то оценивают, что существует человек, имеющий намерение пройти через дверной проем (этап S86), и завершают обработку. Если ответ на эту оценку - НЕТ, то оценивают, что нет человека, собирающегося пройти через дверной проем (этап S88), и завершают обработку.
[0046] Если на этапе S82 оценили, что нет человека, собирающегося пройти через дверной проем, то снова выполняют этап S2. С другой стороны, если на этапе S82 оценили, что есть человек, имеющий намерение пройти через дверной проем, то выполняют этап S22 и на контроллер 34 автоматической двери подают сигнал, указывающий на присутствие человека, собирающегося пройти через дверной проем, а после этого снова выполняют этап S2. Как описано, только когда спрогнозировано, что человек собирается пройти через дверной проем позже в течение заранее определенного времени, открывают дверные панели 12, 12. Соответственно, даже если существует человек, перемещающийся по направлению к неподвижной стене 8, например, никогда не произойдет открытие дверных панелей 12, 12.
[0047] В описанном варианте осуществления изобретения две дверные панели 12, 12 сдвигаются по направлению к неподвижным стенам 8, 8 или по направлению к центру дверного проема 10. Однако, могут использовать только одну дверную панель, которая выполнена с возможностью сдвигания от одной из неподвижных стен 8, 8 по направлению к другой стене для закрытия дверного проема и с возможностью сдвигания при закрытом дверном проеме от указанной другой неподвижной стены 8 по направлению к указанной одной стене для открытия дверного проема. Дополнительно, в вышеописанном варианте осуществления изобретения каждый из светоизлучающего блока 16 и светопринимающего блока 18 был описан содержащим светоизлучающие или светопринимающие устройства в меньшем количестве, чем количество зон обнаружения, но они также могут быть выполнены содержащими указанные устройства в количестве, равном количеству зон обнаружения. Обнаруживающий блок 14 был описан содержащим светоизлучающий блок 16 и светопринимающий блок 18, но он также может быть сформирован только из светопринимающего блока, содержащего в качестве светопринимающих устройств пироэлектрические датчики, причем пироэлектрические датчики принимают инфракрасный свет, излученный от человеческого тела или тому подобного. В вышеописанном варианте осуществления используют средства 32 для определения зон, но в зависимости от ситуации они также могут быть удалены. Был описан вариант осуществления изобретения для такой ситуации, когда дверь открывается, но, разумеется, настоящее изобретение является эффективным при условиях, когда дверь открыта. В этом случае, до тех пор, пока присутствует человек, собирающийся пройти через дверной проем, дверь остается открытой, но, в случае, когда присутствует только человек, проходящий возле двери, дверь начинает операцию закрытия. Обнаруживающий блок 14 и арифметический блок 28 могут быть помещены в один корпус. Альтернативно они могут быть помещены в индивидуальные корпусы и совершать обмен разнообразной информацией, такой как команда обнаружения и информация обнаружения, по шине данных, например, шине сети локальных контроллеров. В таком случае возможна такая конфигурация, что обнаруживающий блок 14 выполнен наружным, а арифметический блок 28 помещен внутрь притолоки 6, а, следовательно, датчик 2 автоматической двери является незаметным, и можно минимизировать его неблагоприятное влияние на внешний вид двери. Кроме того, в этом случае, добавив функцию для обеспечения результата оценки обнаружения объекта, выполненного при помощи средств 26 для обнаружения объекта, относительно каждой зоны обнаружения от обнаруживающего блока 14 на контроллер автоматической двери, обнаруживающий блок 14 можно использовать как для применений, не требующих обнаружения направления и т.п. перемещения человека, а только обнаружения его присутствия, так и для применений, обязательно требующих обнаружения направления и т.п. перемещения человека, как в настоящем изобретении. Это может упростить управление запасами и т.п. Дополнительно, возможно устанавливать только обнаруживающий блок 14 и впоследствии добавлять арифметический блок 28, когда он будет необходим, что упростит обращение с изменениями в окружающей среде установки, такими как количество движения, и, кроме того, нет необходимости в демонтаже существующего датчика автоматической двери и ликвидации его. Таким образом, можно минимизировать влияние на рассматриваемую в целом окружающую среду.
Обнаруживающий блок (14) формирует зоны обнаружения, расположенные двумерным образом на поверхности пола вблизи дверной панели (12). Каждая зона обнаружения выполнена с возможностью обнаружения человека или объекта при помощи инфракрасного света независимо от других зон обнаружения. Средства (30) для распознавания участка распознают участок, сформированный множеством из указанных зон обнаружения, которые обнаружили человека или объект. Средства (44) для оценки перемещения человека оценивают направление, в котором перемещается распознанный участок. Сигнал, вызывающий открытие дверной панели (12), подают на дверной контроллер (34), только когда направление перемещения распознанного участка является направлением к этой дверной панели. 7 з.п. ф-лы, 18 ил.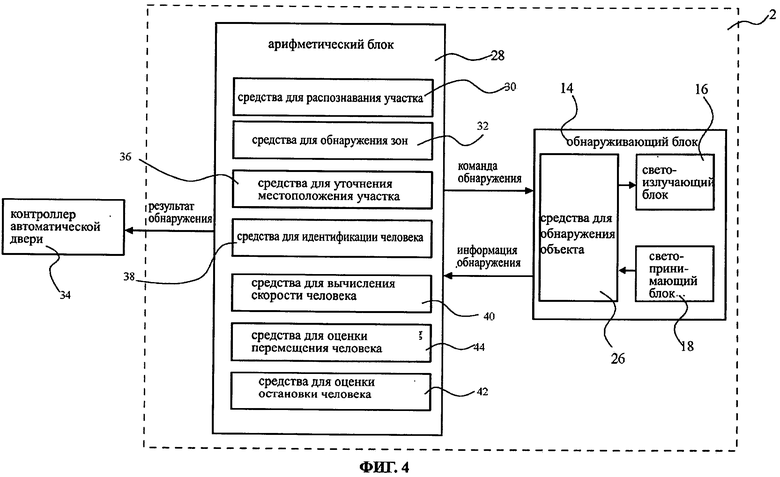
1. Датчик для использования с автоматической дверью, содержащий:
обнаруживающие средства, формирующие зоны обнаружения, расположенные двумерным образом на поверхности пола, каждая из которых выполнена с возможностью обнаружения человека или объекта при помощи инфракрасного света независимо от других зон обнаружения;
распознающие средства, распознающие участок, сформированный множеством из указанных зон обнаружения, обнаруживающих человека или объект;
оценивающие средства, оценивающие направление, в котором перемещается указанный распознанный участок; и
средства для вывода, подающие сигнал, вызывающий открытие указанной двери, когда направление перемещения указанного распознанного участка является направлением к двери,
причем при наличии множества распознанных участков указанные распознающие средства независимо распознают соответствующие участки из указанного множества участков;
указанные оценивающие средства независимо оценивают направления, в которых перемещаются указанные распознанные участки; и
указанные средства для вывода подают сигнал, вызывающий открытие двери, когда направление перемещения любого из указанных независимо распознанных участков является направлением к двери.
2. Датчик по п.1, в котором указанные оценивающие средства вычисляют направление перемещения распознанного участка на основе местоположения центра тяжести указанного распознанного участка.
3. Датчик по п.2, в котором указанные средства для вывода подают сигнал, вызывающий открытие двери, когда направление перемещения распознанного участка представляет собой направление к указанной двери, а прогноз местоположения центра тяжести распознанного участка, выполненный на основе местоположения центра тяжести указанного распознанного участка и скорости перемещения местоположения указанного центра тяжести, вычисленной на основе изменения его местоположения во времени, показывает, что местоположение указанного центра тяжести в течение заранее определенного времени пройдет через проем указанной двери.
4. Датчик по п.2, в котором указанные средства для вывода подают сигнал, вызывающий открытие двери, также когда местоположение центра тяжести указанного распознанного участка задерживается в заранее определенной области вблизи указанной двери.
5. Датчик по п.2, в котором указанные средства для вывода подают сигнал, вызывающий открытие двери, также когда местоположение центра тяжести указанного распознанного участка находится в заранее определенной области вблизи указанной двери.
6. Датчик по п.4 или 5, в котором указанная заранее определенная область заранее задана в соответствии с шириной дверного проема.
7. Датчик по любому из пп.2-5, в котором центр тяжести указанного распознанного участка является центроидом этого распознанного участка, смещенным в направлении указанных обнаруживающих средств на заранее определенное значение.
8. Датчик по любому из пп.2-5, в котором центр тяжести указанного распознанного участка является центроидом этого распознанного участка.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

