Нижеследующее, в целом, относится к формированию изображений и, более конкретно, к фильтру, используемому для уменьшения излучения на краях пучка излучения в компьютеризованных томографических сканерах (СТ).
Традиционный сканер СТ содержит рентгеновскую трубку, испускающую излучение. Коллиматор источника располагается между рентгеновской трубкой и областью исследования и коллимирует испускаемое излучение для создания рентгеновского пучка веерного или конусного профиля. Коллимированный пучок пересекает область исследования и объект или субъект, находящийся в ней (который ослабляет пучок в соответствии с функцией рентгеноконтрастности объекта или субъекта), и облучает детекторную матрицу, расположенную поперек области исследования относительно рентгеновской трубки. Детектор создает проекционные данные, характеризующие обнаруженное излучение, и проекционные данные реконструируются для формирования данных объемного изображения, характеризующих объект или субъект.
Так называемый фильтр-бабочка располагается между коллиматором источника и областью исследования и ослабляет рентгеновский пучок веерного или конусного профиля в большей степени во внешних областях или на периферийных лучах пучка, уменьшая, таким образом, поток во внешних областях веерного или конического луча. Название фильтра отражает типичную форму фильтра. Такая фильтрация хорошо подходит для детекторов счета фотонов, имеющих недостаточные возможности скорости подсчета. Например, при стандартном СТ-сканировании чрезмерные скорости подсчета требуются только для лучей пучка, которые не проходят через субъект или которые проходят через субъект только короткие расстояния в периферийных областях. Такая фильтрация также хорошо подходит для использования со сканерами с детекторами без счета, например, чтобы повысить эффективность излучения и т.д.
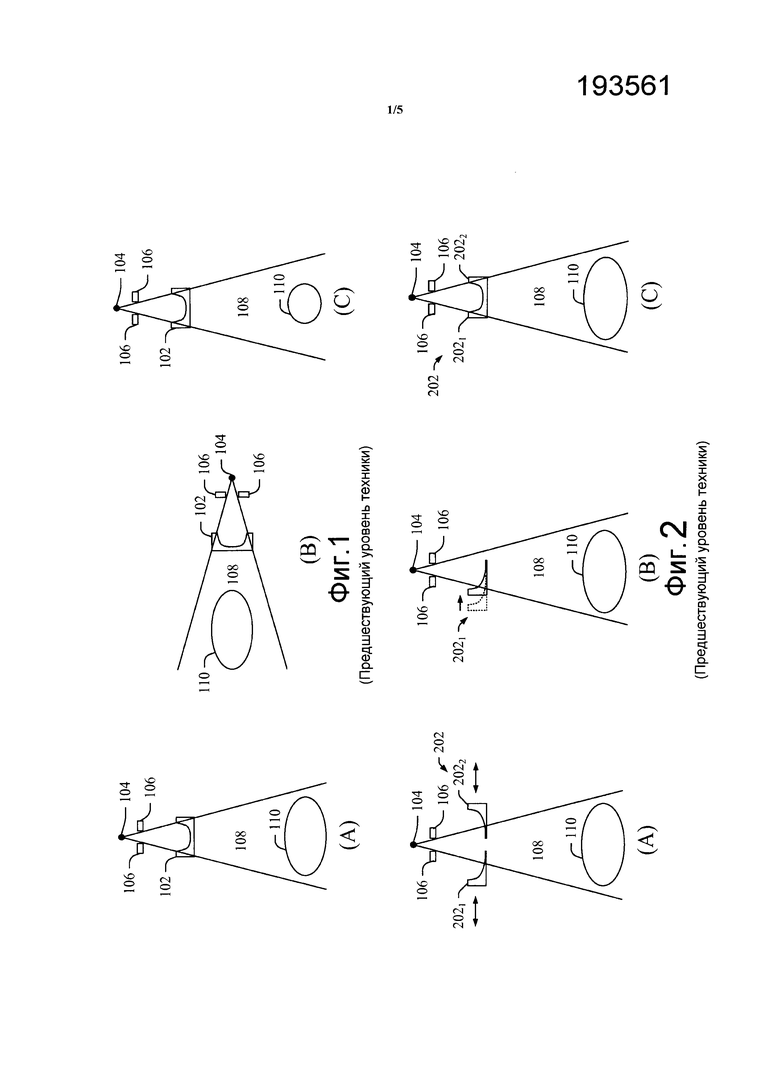
На фиг.1(A), 1(B) и 1(C) показан пример традиционного статического фильтра-бабочки 102, связанного с источником 104 рентгеновского излучения, коллиматором 106 источника и областью 108 исследования и участком субъекта 110, подлежащего сканированию. Теоретически, фильтр 102 соответствует профилю или форме субъекта, подлежащего сканированию, в значительной степени фильтрует области пучка, проходящие только через воздух, лишь незначительно фильтруя область пучка, проходящую через субъект, и плавно изменяет степень фильтрации при переходе между ними так, чтобы можно было достигнуть надлежащего профиля рентгеновского излучения. Сканирование воздуха выполняется, чтобы измерить профиль ослабления фильтра и сформировать на его основе калибровку для нормализации пикселей детектора во время реконструкции.
К сожалению, профиль каждого субъекта неодинаков, поскольку профиль может быть больше для одного объекта, меньше для других субъектов и может также отличаться, будучи более или менее цилиндрическим, как показано на фиг.1(A) и 1(C). Дополнительно, профиль одного и того же субъекта может быть совершенно разным, в зависимости от угла, под которым рассматривается субъект, как показано на фиг.1(A) и 1(B). Как следствие, статический фильтр может быть более подходящим для одних субъектов, но быть неподходящим для других субъектов, поскольку фильтр не может совпадать с каждым субъектом. Кроме того, субъект может располагаться вне центра, так что участок луча, проходящий через воздух, фильтруется незначительно, а участок пучка, проходящий через субъект, фильтруется в значительной степени. В результате, поток фотонов на краях субъекта может снижать точность выходного сигнала детектора до уровня, который может быть слишком низким для получения диагностически ценных изображений.
На фиг.2(A), 2(B) и 2(C) показан пример динамического фильтра-бабочки 202, образованного двумя субфильтрами 2021 и 2022, каждый из которых имеет область более высокого ослабления, которая плавно переходит к области более низкого, ниспадающего ослабления. Для показанного динамического фильтра субфильтры 2021 и 2022 линейно перемещаются в направлении друг к другу или друг от друга, чтобы динамически изменять профиль фильтра, как показано на фиг.2(A) и 2(B). Заметим, что на фиг.2(B) для ясности показан только субфильтр 2021 (без субфильтра 2022). В этом примере субфильтры 2021 и 2022 могут объединяться, чтобы формировать профиль, показанный на фиг.2(C), подобный профилю статического фильтра, показанному на фиг.1.
К сожалению, при наличии фильтра 202 длина пучка от фокусного пятна до каждого местоположения вдоль субфильтра изменяется в зависимости от местоположения субфильтра, и толщина субфильтра для пучка также изменяется в зависимости от местоположения субфильтра, делая кошмаром калибровку каждого пикселя для профиля фильтра 202, и качество изображения очень чувствительно к точному знанию влияния фильтра-бабочки на каждый отдельный пиксель детектора.
Варианты настоящей заявки направлены на решение упомянутых выше и других проблем.
Согласно одному аспекту система формирования изображения содержит источник, имеющий фокусное пятно, который испускает пучок излучения, проходящий через область исследования, чувствительную к излучению, детекторную матрицу, имеющую множество пикселей, обнаруживающих излучение, проходящее через область исследования, и формирующую проекционные данные, характеризующие обнаруженное излучение, и фильтр, расположенный между источником и областью исследования, который фильтрует периферийные области испускаемого излучения, в которой фильтр содержит две отдельные и подвижные области, причем каждая область имеет, по существу, одну и ту же толщину и постоянную гомогенность.
В соответствии с другим аспектом, способ содержит фильтрацию периферийных лучей испускаемого пучка излучения, проходящего через область исследования, которые, по существу, не проходят через субъект или объект в области исследования, с динамически регулируемым фильтром, имеющим, по существу, одну и ту же толщину и гомогенность вдоль фильтра.
В соответствии с другим аспектом, способ снижения потока периферийных лучей пучка излучения содержит идентификацию местоположения периферийных лучей во время сканирования субъекта или объекта, динамически перемещая фильтр, имеющий однородную толщину и, по существу, одну и ту же гомогенность на пути прохождения периферийных лучей, фильтрацию, таким образом, периферийных лучей с помощью динамически располагаемого фильтра, обнаруживая излучение, отфильтрованное фильтром, и излучение, не фильтрованное фильтром, и формирование проекционных данных, характеризующих обнаруженное излучение.
Изобретение может принимать форму различных компонент и организации компонент, а также различных этапов и организации этапов. Чертежи служат только для целей иллюстрирования предпочтительных вариантов осуществления и не должны рассматриваться как ограничение изобретения.
Фиг.1 - статический фильтр, соответствующий предшествующему уровню техники.
Фиг.2 - динамический фильтр, соответствующий предшествующему уровню техники.
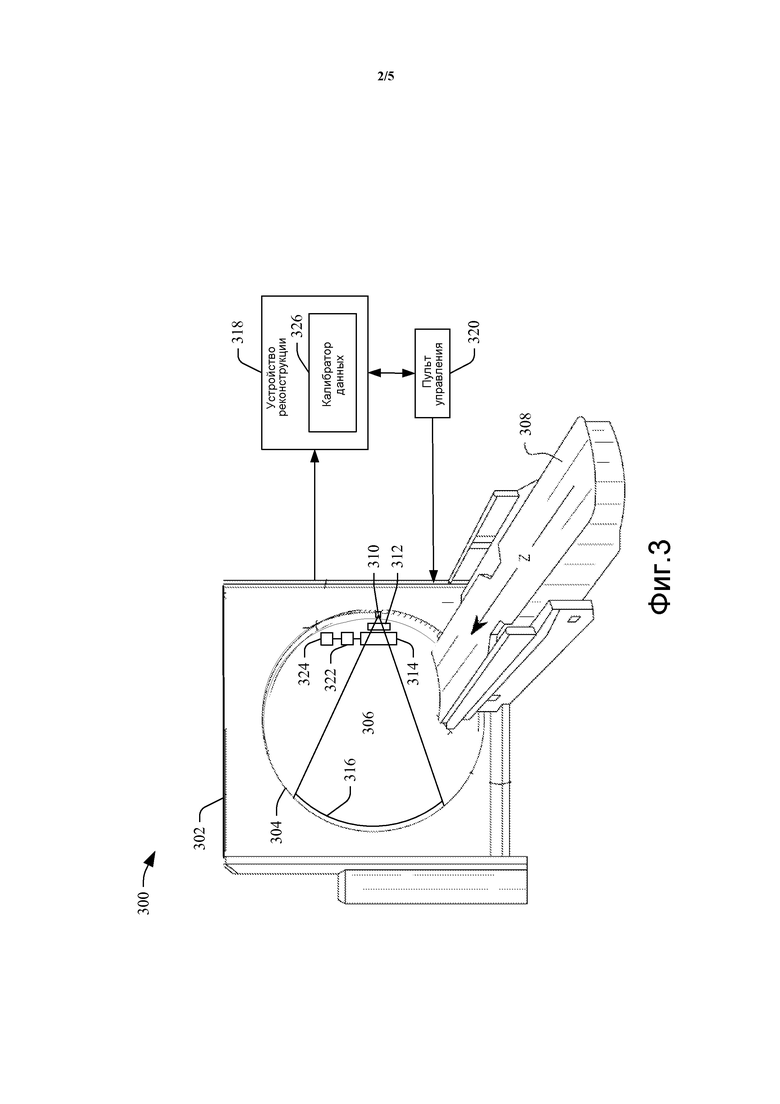
Фиг.3 - пример системы формирования изображения, содержащей динамический фильтр с однородной толщиной и, по существу, постоянной гомогенностью.
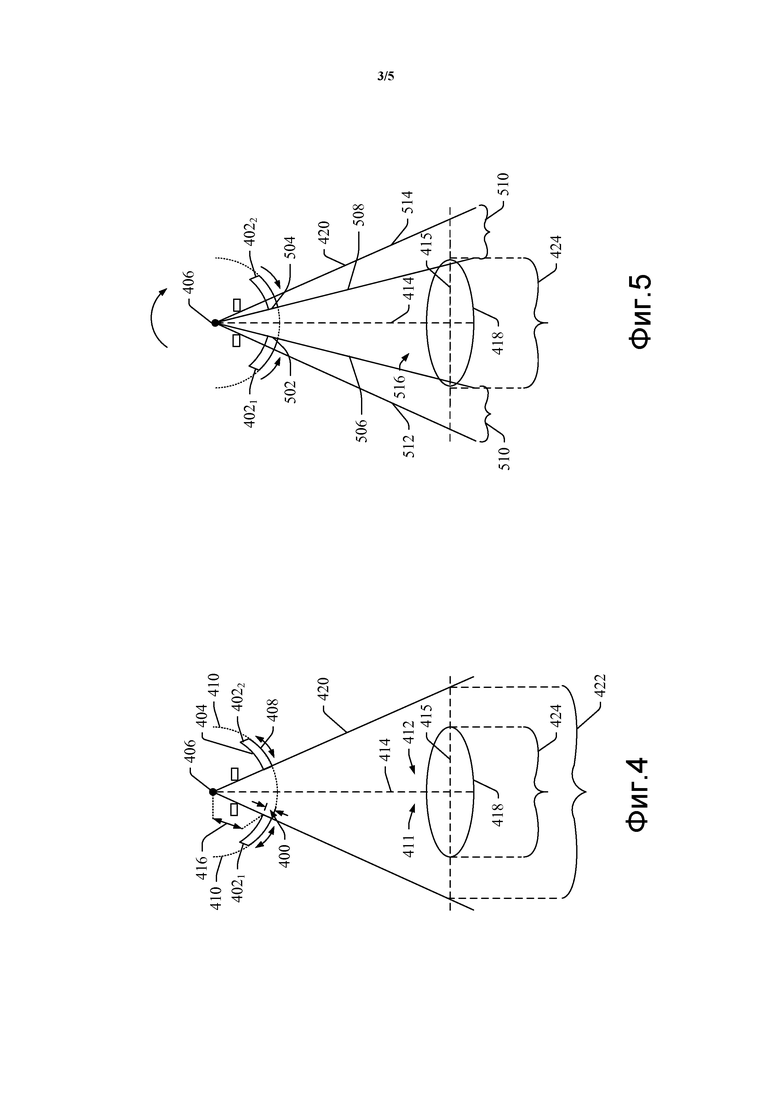
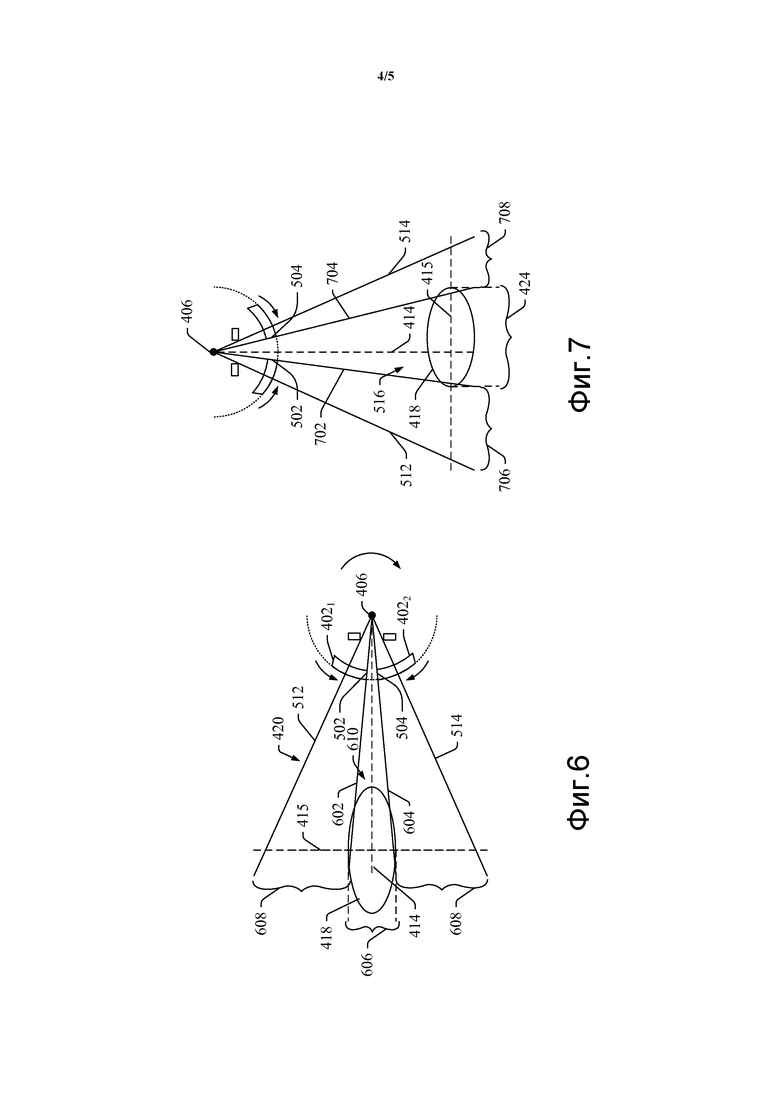
Фиг.4, 5 и 6 - пример динамического фильтра в сочетании с симметричным перемещением области фильтрации.
Фиг.7 - пример динамического фильтра в сочетании с асимметричным перемещением области фильтрации.
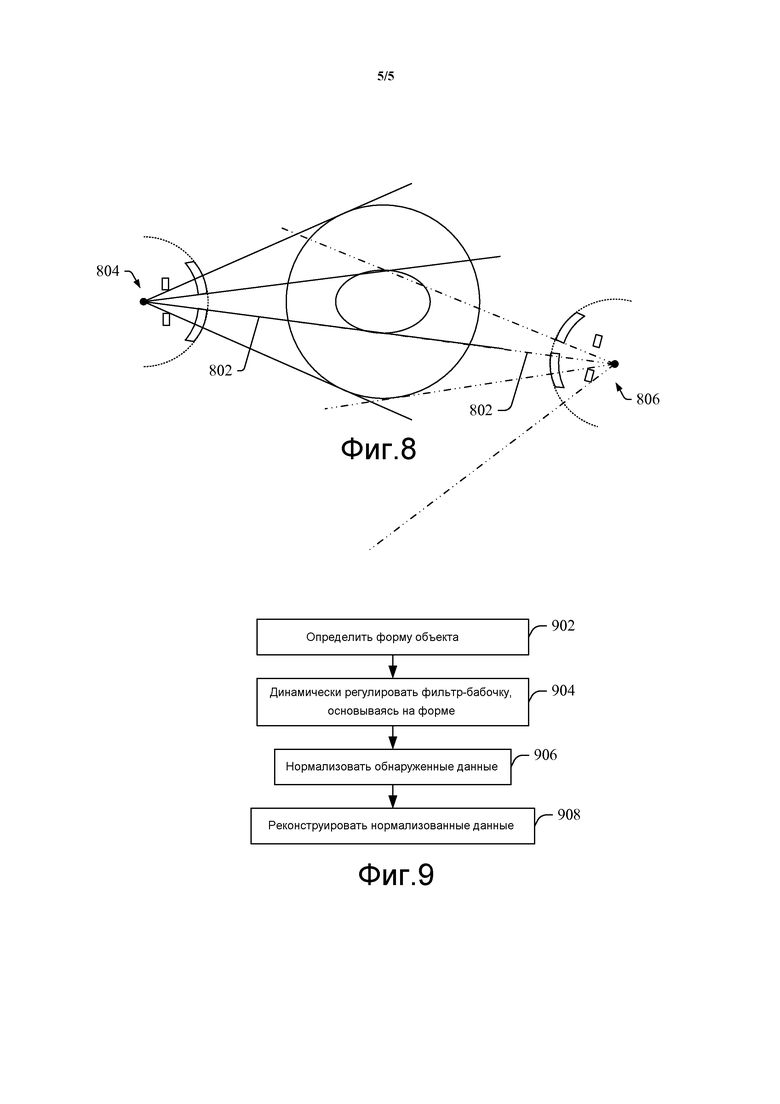
Фиг.8 - пример различной фильтрации луча, обнаруженного в противоположном направлении, используя динамический фильтр.
Фиг.9 - пример способа.
На фиг.3 представлена система 300 формирования изображения, такая как компьютеризованный томографический сканер (СТ). Система 300 формирования изображения содержит неподвижную портальную раму 302 и вращающуюся портальную раму 304, которая поддерживается неподвижной портальной рамой 302 с возможностью вращения. Вращающаяся портальная рама 304 вращается вокруг области 306 исследования относительно продольной оси или оси Z. Основание 308, такое как кушетка, поддерживает субъект в области 306 исследования и может использоваться для позиционирования объекта относительно осей x, y и/или z перед, во время и/или после сканирования.
Источник 310 излучения, такой как рентгеновская трубка, поддерживается вращающейся портальной рамой 304, и вращается вместе с вращающейся портальной рамой 304 вокруг области 306 исследования, и испускает излучение, проходящее через область 306 исследования. Коллиматор 312 источника коллимирует испускаемое излучение, обычно формируя пучок веерной, конусной или другой формы, проходящий через область 306 исследования. Чувствительная к излучению детекторная матрица 316 располагается напротив источника 310 излучения после области 306 исследования. Чувствительная к излучению детекторная матрица 316 содержит множество пикселей детектора, обнаруживающих излучение, проходящее через область 306 исследования, и формирующих проекционные данные, характеризующие обнаруженное излучение.
Динамический фильтр 314 располагается между коллиматором 312 и областью 306 исследования и фильтрует коллимированный пучок. Как описано ниже более подробно, динамический фильтр 314 выполнен с возможностью динамической регулировки его профиля посредством перемещения одной или более его областей, основываясь на форме сканируемого объекта или субъекта, в то же время, смягчая влияние на калибровку нормализации ослабления фильтра. Перемещение одной или более областей может достигаться действием одного или более двигателей 322, механически связанных с одной или более областями фильтра, и контроллера 324, управляющего тем или другим двигателями 322, чтобы перемещать, индивидуально или одновременно, одну или более области фильтра вдоль заданного пути, такого как направляющая дорожка, рельс и т.п.
Устройство 318 реконструкции реконструирует обработанные проекционные данные и формирует объемные данные изображения, характеризующие область 306 исследования. Устройство 318 реконструкции содержит калибратор 326 данных для калибровки пикселей детектора, основываясь на профиле динамического фильтра 314. Как описано ниже более подробно, могут использоваться различные калибровочные алгоритмы, в зависимости от того, обнаруживает ли пиксель полностью фильтрованное излучение, нефильтрованное излучение или частично фильтрованное/частично нефильтрованное излучение. Результирующие объемные данные изображения могут быть обработаны процессором изображения и т.п., чтобы сформировать одно или более изображений. Универсальная вычислительная система служит в качестве пульта 320 управления оператора и содержит устройство вывода, такое как дисплей, и устройство ввода, такое как клавиатура, мышь и/или т.п. Программное обеспечение, постоянно присутствующее на пульте 320 управления, позволяет оператору управлять работой системы 300, например, давая оператору возможность выбрать протокол, используемый динамическим фильтром, инициировать сканирование и т.д.
На фиг.4 представлен пример динамического фильтра 314. В этом примере фильтр 314 содержит по меньшей мере первую область 4021 и вторую область 4022, вместе называемые областями 402 фильтра. Области 402 фильтра располагаются на противоположных сторонах 411 и 412 воображаемой линии 414, проходящей перпендикулярно от фокусной точки (пятна) 406 к в основном планарной или плоской плоскости 415 формирования изображения. Каждая из областей 402 фильтра является цилиндрическим объемом, по существу, с однородной (например, одной и той же) толщиной 400, обладающей одной и той же или постоянной гомогенностью. В показанном варианте осуществления каждая из областей 402 фильтра имеет вогнутую сторону 404, обращенную к фокусному пятну 406, и противоположную выпуклую сторону 408, обращенную к детекторной матрице 316.
Относительно вогнутой стороны 404, расстояние 416 от точек вдоль стороны 404 до фокусного пятна 406 является, по существу, одним и тем же вдоль областей 402 фильтра. Показанные области 402 фильтра выполнены с возможностью перемещения, независимо или в комбинации, вдоль путей 410 в форме дуги относительно фокусного пятна 406 в направлении воображаемой линии 414 или от нее, изменяя, таким образом, расстояние между ними и, следовательно, профиль ослабления. В показанном варианте осуществления, когда области 402 фильтра имеют одну и ту же толщину 400, профиль ослабления имеет два состояния, в которых излучение либо фильтруется за счет однородной толщины, либо не фильтруется фильтром 314. Обычно фильтр 314 фильтрует только внешние или периферийные области пучка излучения.
На фиг.4, 5 и 6 графически показан пример динамичной регулировки областей 402 фильтра 314 в соответствии с объектом 418. В этом примере объект 418 центрован на воображаемой линии 414. На фиг.4 пучок 420 коллимируется так, что ширина 422 пучка 420 на плоскости 415 формирования изображения шире, чем ширина 424 объекта 418, и области 402 располагаются так, что фильтр 314 никак не фильтрует пучок 420. Эта конкретная конфигурация предназначена только для целей объяснения, и области 402 могут первоначально располагаться как-либо иначе.
На фиг.5 фокусное пятно 406 перемещается через крайнее верхнее положение (12-часовое положение), а области 402 перемещаются вдоль путей 410 в направлении воображаемой линии 414. В этом примере области 402 перемещаются до тех пор, пока края 502 и 504 не станут, по существу, выровнены с лучами 506 и 508, пересекающими пути внутри и вблизи краев периметра объекта 418 по ширине 424 объекта 418. Заметим, что фильтрация лучей, проходящих через объект на краях, не препятствует формирования изображения в этих областях. Конечно, края 502 и 504 могут быть выровнены иначе, и может быть добавлено поле допуска для гарантии, что объект 418 адекватно сканируется, такие поля допуска, которые могут позволить перемещать области 402 ближе к воображаемой линии 414, чтобы, например, избежать чрезмерных скоростей счета. В этом случае фильтр 314 равномерно фильтрует области 510 между внешними лучами 512 и 514, лучами 506 и 508 пучка 420 и не фильтрует область 516 между лучами 506 и 508.
На фиг.6 фокусное пятно 406 перемещается через крайнее правое положение (трехчасовое положение). Области 402 перемещаются вдоль путей 410 в направлении воображаемой линии 414, пока края 502 и 504 соответственно не выровняются с лучами 602 и 604, пересекающими пути внутри и вблизи краев периметра объекта 418 на глубине 606 объекта 418. В этом случае фильтр 314 равномерно фильтрует области 608 между внешними лучами 512 и 514, лучами 602 и 604 пучка 420 и не фильтрует участок области 610 между лучами 602 и 604 внутри и вблизи ее краев.
Дополнительно, обращаясь к фиг.4-6, края 502 и 504 всегда параллельны лучам (например, 506, 508, 512, 514, 602 и 604) пучка 420. Кроме того, следует понимать, что области 402 фильтра могут непрерывно или дискретно (с заданными одинаковыми или неодинаковыми интервалами) динамически регулироваться по мере того, как фокусное пятно 406 вращается вокруг области 306 исследования на триста шестьдесят градусов или меньше.
Для определения, где должны находиться края 502 и 504 во время заданного интервала формирования изображения, могут использоваться различные подходы. Например, в одном случае могут быть выполнены одно или более двумерных и/или трехмерных предварительных сканирований (например, предварительное, пилотное и т.д.), и полученные в результате данные могут использоваться для планирования сканирования, в том числе, для идентификации периметра объекта 418. В другом случае периметр объекта 418 оценивается во время сканирования, основываясь на значениях относительной интенсивности обнаруженных данных.
На фиг.7 графически показан пример, в котором объект 418 располагается вне центра по отношению к воображаемой центральной линии 414. В этом случае области 402 перемещаются на различные расстояния (асимметрично) независимо, чтобы выровнять края 502 и 504, соответственно, с лучами 702 и 704, пересекающими пути, которые пересекают периметр объекта 418 по ширине 424 объекта 418. В этом случае, фильтр 314 равномерно фильтрует области 706 и 708 между внешними лучами 512 и 514 пучка 420, лучами 702 и 704 и не фильтрует некоторый участок области 516.
На фиг.3-7, где толщина 400 и гомогенность бабочки достаточно точны и движение выполняется точно, каждый пиксель детектора в детекторной матрице 316 может работать в трех различных режимах: 1) пиксель видит полный поток (отсутствует фильтрация фильтром 314), 2) пиксель видит уменьшенный поток (существует фильтрация фильтром 314) или 3) пиксель находится в положении, когда поток частично уменьшается фильтром 314 (частично фильтрация присутствует и частично отсутствует). Режимы 1 и 2 являются устойчивыми ситуациями и могут корректироваться с помощью двух различных наборов калибровки. В режиме 3 только небольшое количество пикселей детектора будет работать в пределах проекции, и обычно пиксели, работающие в режиме 3, будут обладать ненадежной калибровкой.
Во время сканирования, однако, относительное положение подвижных областей 402 фильтра 314 может прослеживаться (например, посредством кодера и т.п.) и/или оцениваться. С помощью этой информации для каждого пикселя могут быть идентифицированы три рабочих режима. В зависимости от режима, данные считывания пикселей затем либо калибруются с помощью калибровочного набора для режима 1, калибровочного набора для режима 2 или гибридной калибровки для режима 3. Ниже приведены примеры подходящих калибровок для режима 3, не являющиеся, однако, ограничениями. Один или более следующих подходов могут объединяться или, в противном случае, использоваться одновременно, и/или один или более подходов могут использоваться дополнительно или альтернативно.
В одном варианте осуществления калибратор 326 данных отбрасывает результаты измерений для режима 3 и заменяет результаты измерений интерполированными (например, линейными или более высокого порядка) значениями, основываясь на соседних пикселях, действующих в режиме 1 и/или 2. В другом варианте осуществления результаты измерений для режима 3 могут быть калиброваны с помощью оценочного калибровочного набора, основываясь на калибровочных наборах для режимов 1 и 2. Оценочный набор может быть простым средним значением калибровочных наборов для режимов 1 и 2 или взвешенным средним значением, в котором более высокий вес применяется к калибровочному набору, соответствующему пикселю, более близкому к пикселю, находящемуся в режиме 3. Другими словами, калибровка может смешиваться от калибровочного набора 1 до калибровочного набора 2, перемещаясь от калибровочного набора для режима 1 и калибровочного набора для режима 2. В другом варианте осуществления устройство 318 реконструкции использует итерационный алгоритм, в котором пиксели, находящиеся в режиме 3, отбрасываются или получают малый вес, чтобы ограничить их влияние.
Для протоколов сканирования, в которых проекции получают через триста шестьдесят градусов, каждый луч измеряется дважды, но в противоположных направлениях. Для таких протоколов области 402 фильтра могут перемещаться так, чтобы по меньшей мере один из двух избыточных результатов измерений подпадал под режим 1 или режим 2. Когда другой из двух избыточных результатов измерений подпадает под действие режима 3, этот результат измерений может быть отброшен и заменен избыточным результатом измерений, подпадающим под действие режима 1 или режима 2.
Это показано на фиг.8, где луч 802 измеряется при расположении фокусного пятна 406 в первом положении 804, и луч 802 также измеряется при расположении фокусного пятна 406 во втором положении 806 после того, как фокус перешел на противоположную сторону отсканированного объекта 418. Как показано на чертеже, при измерении с расположением фокусного пятна 406 в первом положении 804 луч 802 подпадает под действие режима 3 (луч 802 проходит вдоль края фильтра), а при измерении с фокусным пятном 406, расположенным во втором положении 806, луч 802 подпадает под действие режима 2 (луч 802 проходит через фильтр и фильтруется фильтром).
На фиг.9 представлен способ. Следует понимать, что порядок действий не является ограничением. По существу, в других вариантах осуществления порядок действий может быть другим. Кроме того, одно или более действий могут быть опущены, и/или одно или более других действий могут быть добавлены.
На этапе 902 определяется форма субъекта (или объекта), подлежащего сканированию. Как здесь описано, форма может быть определена посредством предварительного сканирования и/или во время сканирования.
На этапе 904 динамический фильтр динамически регулируется во время сканирования объекта или субъекта, основываясь на определенной форме. Как здесь описано, фильтр имеет постоянную толщину и постоянную гомогенность и движется вдоль пути в форме дуги относительно фокусного пятна источника излучения, чтобы изменить область пучка излучения для проведения фильтрации.
На этапе 906 обнаруженные данные нормализуются, основываясь на том, является ли излучение, принятое соответствующим пикселем детектора, полностью отфильтрованным фильтром, не фильтрованным фильтром, или излучение частично фильтруется и частично не фильтруется фильтром. Как здесь описано, при нормализации данных, соответствующих частично фильтрованному и частично нефильтрованному излучению, могут использоваться различные подходы.
На этапе 908 нормализованные данные реконструируются для формирования объемных данных изображения. Объемные данные изображения могут дополнительно обрабатываться, чтобы сформировать одно или более изображений.
Описанный здесь динамический фильтр 314 может использоваться как, в связи и/или вместо традиционного фильтра-бабочки, такого как фильтры-бабочки, раскрытые со ссылкой на фиг.1 и 2, а также другие фильтры-бабочки.
Изобретение было описано со ссылкой на предпочтительные варианты осуществления. После прочтения и понимания предшествующего подробного описания другими людьми могут быть предложены модификации и изменения. Подразумевается, что изобретение истолковывается так, что содержит в себе все такие модификации и изменения, насколько они попадают в область действия приложенной формулы изобретения или ее эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОСЛЕПАЦИЕНТНЫЙ ДИНАМИЧЕСКИЙ ФИЛЬТР ДЛЯ КОМПЬЮТЕРНОЙ ТОМОГРАФИИ (СТ) | 2011 |
|
RU2594807C2 |
| СОКРАТИТЕЛЬ РЕНТГЕНОВСКОГО ПОТОКА ДЛЯ ДЕТЕКТОРА ПОДСЧЕТА ФОТОНОВ | 2015 |
|
RU2699280C2 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ С МАССИВОМ ИЗ МНОЖЕСТВА ДЕТЕКТОРОВ | 2010 |
|
RU2534612C2 |
| ДЕТЕКТОР ДЛЯ ПОДСЧЕТА ФОТОНОВ | 2012 |
|
RU2594602C2 |
| ДЕТЕКТОР СПЕКТРАЛЬНОЙ ВИЗУАЛИЗАЦИИ | 2009 |
|
RU2505840C2 |
| АППАРАТ ДЛЯ ФОРМИРОВАНИЯ ДВУХЭНЕРГЕТИЧЕСКИХ ДАННЫХ РЕНТГЕНОВСКОГО ИЗОБРАЖЕНИЯ | 2018 |
|
RU2748430C1 |
| УСТРОЙСТВО КОМПЬЮТЕРНОЙ ТОМОГРАФИИ | 2010 |
|
RU2557466C2 |
| АДАПТИВНАЯ КАЛИБРОВКА ДЛЯ СИСТЕМ ТОМОГРАФИЧЕСКОЙ ВИЗУАЛИЗАЦИИ | 2012 |
|
RU2588490C2 |
| УСТРОЙСТВО И СПОСОБ ВИЗУАЛИЗАЦИИ | 2015 |
|
RU2700470C2 |
| СПОСОБ УМЕНЬШЕНИЯ АРТЕФАКТОВ В ИЗОБРАЖЕНИЯХ КОНУСНО-ЛУЧЕВОЙ КОМПЬЮТЕРНОЙ ТОМОГРАФИИ | 2010 |
|
RU2543547C2 |
Изобретение относится к системе формирования изображений. Система содержит источник (310), имеющий фокус (406), который испускает пучок излучения, проходящий через область исследования, чувствительную к излучению детекторную матрицу (316), имеющую множество пикселей, обнаруживающих излучение, проходящее через область исследования, и формирующую проекционные данные, характеризующие обнаруженное излучение. Кроме того, предусмотрено наличие фильтра (314), расположенного между источником и областью исследования, фильтрующего периферийные области испускаемого излучения, причем фильтр содержит две отдельные и подвижные области (402), где каждая область имеет, по существу, одну и ту же толщину и постоянную гомогенность. Техническим результатом является повышение качества изображения за счет формирования проекционных данных, характеризующих обнаруженное излучение. 2 н. и 13 з.п. ф-лы, 9 ил.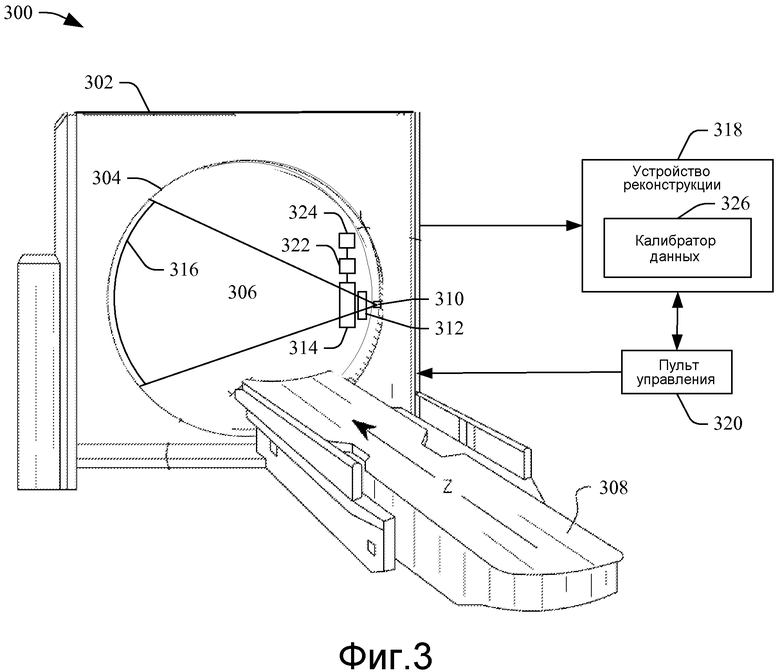
1. Система формирования изображений, содержащая:
источник (310), имеющий фокусное пятно (406), который испускает пучок излучения, проходящий через область исследования;
чувствительную к излучению детекторную матрицу (316), имеющую множество пикселей, которые обнаруживают излучение, проходящее через область исследования, и формируют проекционные данные, характеризующие обнаруженное излучение; и
фильтр (314), расположенный между источником и областью исследования, фильтрующий периферийные области испускаемого излучения, при этом фильтр содержит две отдельные и перемещаемые области (402), причем каждая область имеет, по существу, одинаковую толщину и постоянную гомогенность.
2. Система по п.1, в которой каждая из областей фильтра имеет цилиндрическую форму и имеет край, по существу, всегда параллельный лучу испускаемого пучка излучения, когда области фильтра фильтруют пучок излучения.
3. Система по любому из пп.1-2, в которой каждая из областей фильтра имеет, по существу, одну и ту же характеристику ослабления излучения.
4. Система по любому из пп.1-2, в которой каждая из областей фильтра выполнена с возможностью перемещения вдоль пути в форме дуги вокруг фокусного пятна, изменяя, таким образом, профиль ослабления фильтра.
5. Система по п.4, в которой каждая из областей фильтра выполнена с возможностью динамического перемещения в соответствии с формой объекта или субъекта во время сканирования объекта или субъекта.
6. Система по п.4, в которой области фильтра перемещаются одновременно и скоординировано.
7. Система по п.4, в которой области фильтра перемещаются асимметрично.
8. Система по п.5, в которой форма объекта или субъекта определяется во время сканирования, основываясь на сформированных данных.
9. Система по п.5, в которой форма объекта или субъекта определяется, основываясь на одном или более предварительных сканированиях объекта или субъекта.
10. Система по любому из пп.1-2, дополнительно содержащая:
устройство (318) реконструкции, которое калибрует проекцию, в которой пиксель, обнаруживающий излучение, отфильтрованное фильтром, калибруется, основываясь на калибровочном наборе, соответствующем отфильтрованным данным, пиксель, обнаруживающий излучение, прошедшее фильтр, которое не фильтруется фильтром, калибруется, основываясь на калибровочном наборе, соответствующем нефильтрованным данным, и пиксель, обнаруживающий излучение, которое частично фильтруется и частично не фильтруется, калибруется с помощью гибридного калибровочного алгоритма.
11. Способ, содержащий этап, на котором:
фильтруют периферийные лучи испускаемого пучка излучения, проходящего через область исследования, которые, по существу, не проходят через объект или субъект в области исследования, с помощью динамически регулируемого фильтра, имеющего, по существу, одну и ту же толщину и гомогенность вдоль фильтра.
12. Способ по п.11, в котором край фильтра, по существу, параллелен лучу испускаемого излучения.
13. Способ по любому из пп.11-12, дополнительно содержащий этап, на котором:
перемещают области фильтра вдоль соответствующих путей в форме дуги вокруг фокуса, изменяя, таким образом, профиль ослабления фильтра в координации с формой сканируемого объекта или субъекта.
14. Способ по любому из пп.11-12, дополнительно содержащий этап, на котором:
калибруют пиксель детектора, принимающий частично отфильтрованное излучение, используя гибридный калибровочный алгоритм, в котором калибровочный алгоритм содержит замену результата измерения пикселя на значение, определенное интерполяцией результата измерения, основываясь на соседних пикселях, принимающих полностью фильтрованное или нефильтрованное излучение, и калибровочный алгоритм содержит отбрасывание или придание малого веса пикселю при выполнении итеративной реконструкции.
15. Способ по п.14, в котором калибровочный алгоритм оценивается, основываясь на калибровке для пикселей, принимающих полностью фильтрованное излучение, и на калибровке для пикселей, принимающих нефильтрованное излучение, и оцененный калибровочный алгоритм содержит взвешенную комбинацию калибровки для пикселей, принимающих полностью фильтрованное излучение, и для пикселей, принимающих нефильтрованное излучение.
| EP0913839 A2, 06.05.1999 | |||
| WO2009063353 A2, 22.05.2009 | |||
| US5278887 A, 11.01.1994 | |||
| СКАНЕР ПОЗИТРОННО-ЭМИССИОННОЙ ТОМОГРАФИИ И МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИИ СО СПОСОБНОСТЬЮ ОПРЕДЕЛЕНИЯ ВРЕМЕНИ ПОЛЕТА | 2006 |
|
RU2384866C2 |

