Нижеследующее относится в общем к визуализации и более конкретно к послепациентному фильтру, используемому для уменьшения потока рентгеновского излучения на периферии или краях пучка излучения в сканерах компьютерной томографии (CT).
Обычный сканер CT включает в себя рентгеновскую трубку, которая испускает излучение. Коллиматор источника расположен между рентгеновской трубкой и областью обследования, и он коллимирует испущенное излучение для создания веерообразного или конусообразного пучка рентгеновского излучения. Коллимированный пучок проходит через область обследования и объект или субъекта в ней (который ослабляет пучок в зависимости от рентгенопроницаемости объекта или субъекта) и освещает матрицу детекторов, расположенную на другой стороне области обследования от рентгеновской трубки. Детектор создает данные проекции, указывающие обнаруженное излучение, а данные проекции реконструируются для формирования данных объемного изображения, показывающего объект или субъекта.
Так называемый фильтр-бабочка (заметим, что название этого фильтра в целом отражает типичную физическую форму фильтра) располагается между коллиматором источника и областью обследования, и он ослабляет веерообразный или конусообразный луч рентгеновского излучения в большей степени во внешних областях или периферийных лучах пучка, таким образом уменьшая поток во внешних областях веерообразного или конического луча. Такая фильтрация хорошо подходит для детекторов со счетом фотонов, которые не обладают достаточными возможностями скорости счета. Например, в типичной компьютерной томографии повышенные скорости счета требуются только для лучей пучка, которые не пересекают предмет (то есть лучей, которые не ослаблены), или которые проходят только короткие расстояния через предмет в периферийных областях (то есть лучей, которые ослаблены на величину, меньшую, чем заранее заданная величина). Такая фильтрация также хорошо подходит для использования со сканерами с детекторами без счета, например, которая может улучшить эффективность излучения и т.д.
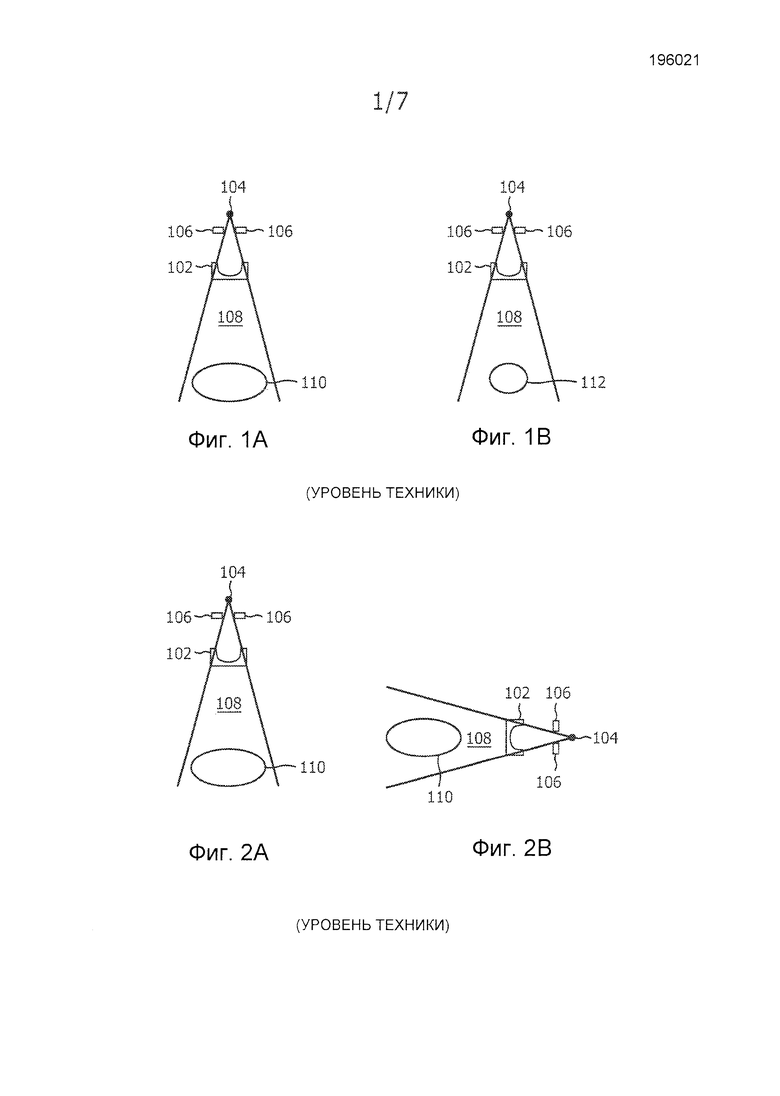
Фиг.1 и 2 изображают пример обычного предпациентного фильтра-бабочки 102, связанного с источником 104 рентгеновского излучения, коллиматором 106 источника и областью 108 обследования, и части сканируемых субъектов 110 и 112. Теоретически, фильтр-бабочка 102 соответствует профилю или форме сканируемого субъекта, и он значительно фильтрует области пучка, которые пересекают только воздух, слегка фильтрует область пучка, которая пересекает субъекта, и гладко меняет степень фильтрации для переходов между ними, так чтобы можно было получить правильный профиль рентгеновского излучения. Пустое сканирование выполняется для измерения профиля ослабления фильтра и для формирования калибровки на его основании для нормализации детектирующих пикселов во время реконструкции.
К сожалению, профиль каждого субъекта неодинаков, поскольку форма субъекта может быть больше для некоторых субъектов, меньше для других пациентов (субъектов), и может также отличаться тем, что может быть более или менее цилиндрической, как показано на Фиг.1(A) и 1(B). Кроме того, профиль одного и того же субъекта может сильно отличаться в зависимости от угла, под которым рассматривается субъект, как показано на Фиг.2(A) и 2(B). Как следствие, фильтр-бабочка 102 может хорошо подходить для некоторых пациентов (субъектов), но может плохо подходить для других пациентов, например, пациентов 110 и 112, так как фильтр 102 не соответствует профилю пациентов 110 и 112. Кроме того, пациент может быть расположен не по центру, так что часть пучка, проходящая через воздух, фильтруется слабо, а часть пучка, проходящая через пациента, фильтруется сильно. В результате поток фотонов по краям пациента может уменьшить точность выходных данных детектора до уровня, который может быть слишком низок для имеющих диагностическую ценность изображений.
Аспекты настоящей заявки решают вышеупомянутые и другие проблемы.
Согласно одному аспекту система визуализации включает в себя источник излучения, выполненный с возможностью вращения вокруг области обследования вокруг оси z и имеющий фокальную точку, которая испускает пучок излучения, который проходит через область обследования. Система дополнительно включает в себя чувствительную к излучению матрицу детекторов с множеством детектирующих пикселов, которая обнаруживает излучение, проходящее через область обследования, и формирует данные проекции, указывающие на обнаруженное излучение. Система дополнительно включает в себя динамический послепациентный фильтр, включающий в себя один или более сегментов фильтра. Фильтр выполнен с возможностью по выбору и динамически перемещаться перед матрицей детекторов между матрицей детекторов и областью обследования в область и из области на пути пучка излучения, освещающего детектирующие пиксели, во время сканирования объекта или субъекта на основании формы объекта или субъекта, таким образом фильтруя неослабленное излучение и излучение, проходящее через периферию объекта или субъекта.
Согласно другому аспекту способ включает в себя фильтрацию периферийных лучей испущенного пучка излучения, проходящего через область обследования, с помощью динамически настраиваемых сегментов фильтра, выполненных с возможностью перемещения по выбору в область и из области перед матрицей детекторов и между матрицей детекторов и областью обследования во время сканирования объекта или субъекта на основании формы объекта или субъекта, таким образом фильтруя неослабленное излучение и излучение, проходящее через периферию объекта или субъекта.
Согласно другому аспекту способ уменьшения потока периферийных лучей пучка излучения включает в себя динамическую фильтрацию периферийных лучей во время сканирования объекта или субъекта путем выборочного расположения сегментов физического фильтра динамически настраиваемого послепациентного фильтра между матрицей детекторов и областью обследования системы визуализации на основании формы объекта или субъекта.
Изобретение может иметь различный вид различных компонентов и расположения компонентов, различных этапов и последовательности этапов. Чертежи представлены только с целью иллюстрации предпочтительных вариантов выполнения и не должны толковаться как ограничение изобретения.
Фиг.1A изображает фильтр-бабочку из уровня техники применительно к первому сканируемому пациенту, имеющему первую форму.
Фиг.1B изображает фильтр-бабочку из уровня техники по Фиг.1 применительно ко второму сканируемому пациенту, имеющему вторую форму.
Фиг.2A изображает фильтр-бабочку из уровня техники, расположенный под первым углом, применительно к сканируемому пациенту в целом эллиптической формы.
Фиг.2B изображает фильтр-бабочку из уровня техники, расположенный под вторым углом, применительно к сканируемому пациенту в целом эллиптической формы.
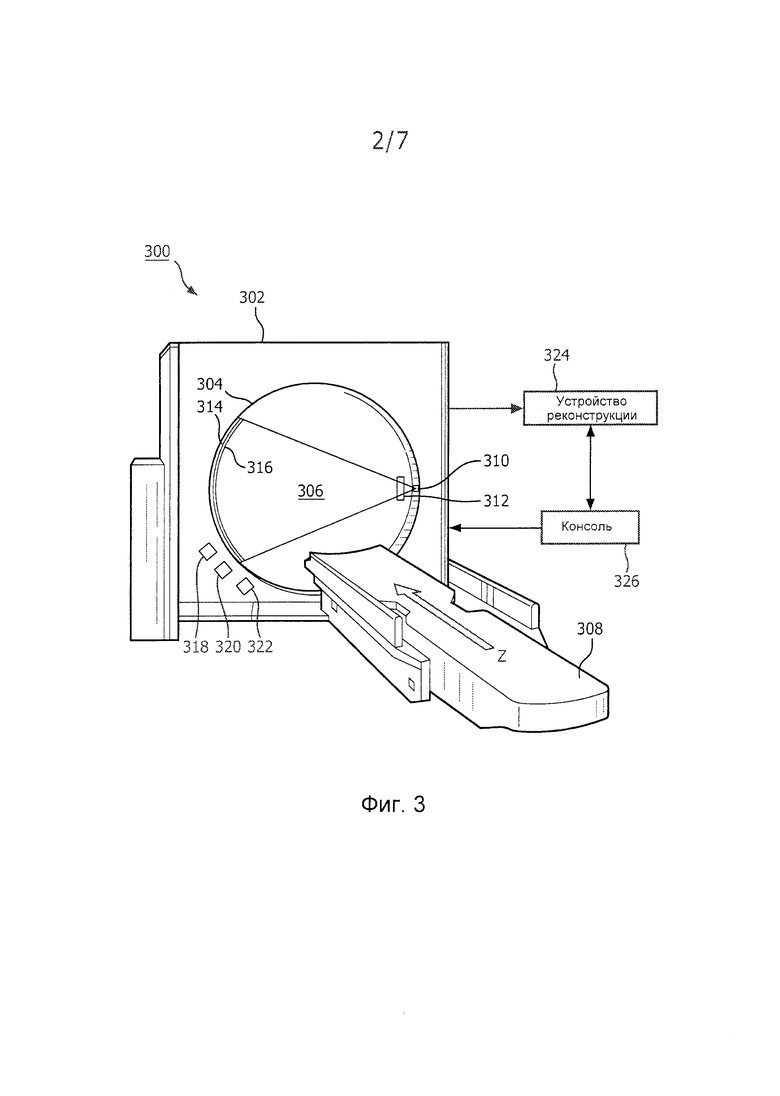
Фиг.3 изображает примерную систему визуализации, включающую в себя динамический послепациентный фильтр для уменьшения потока рентгеновского излучения на периферии пучка излучения.
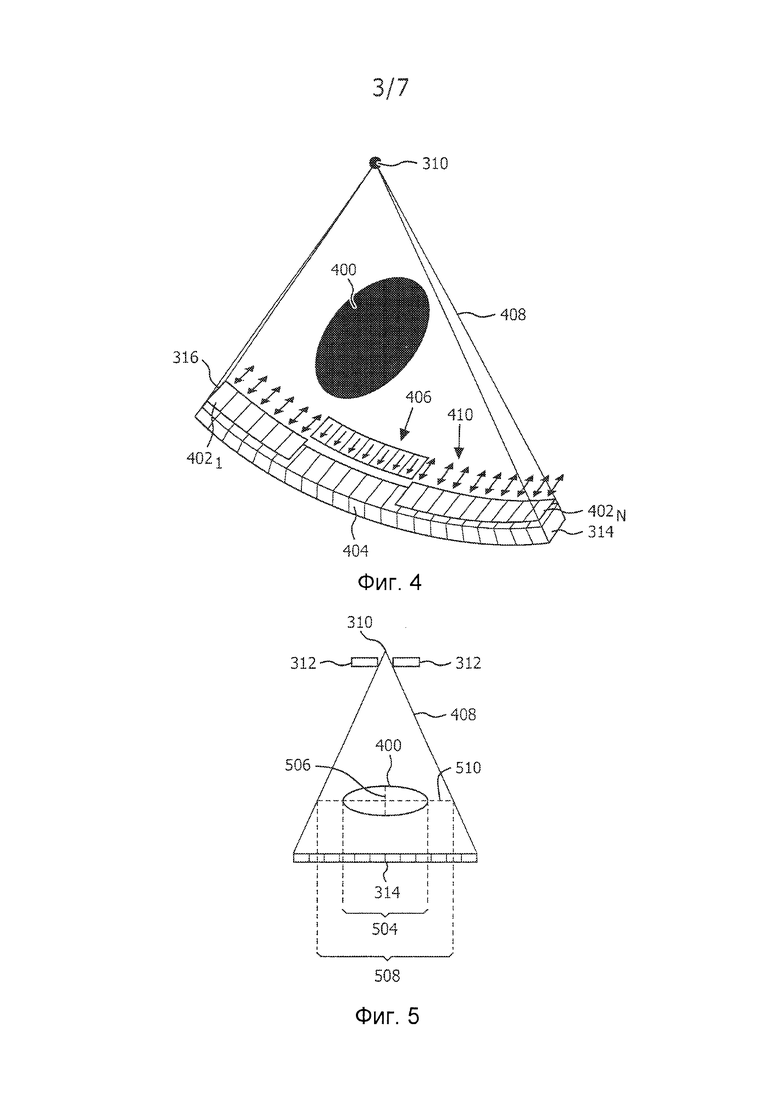
Фиг.4 изображает иллюстративный динамический послепациентный фильтр, в котором фильтр перемещается вдоль оси z.
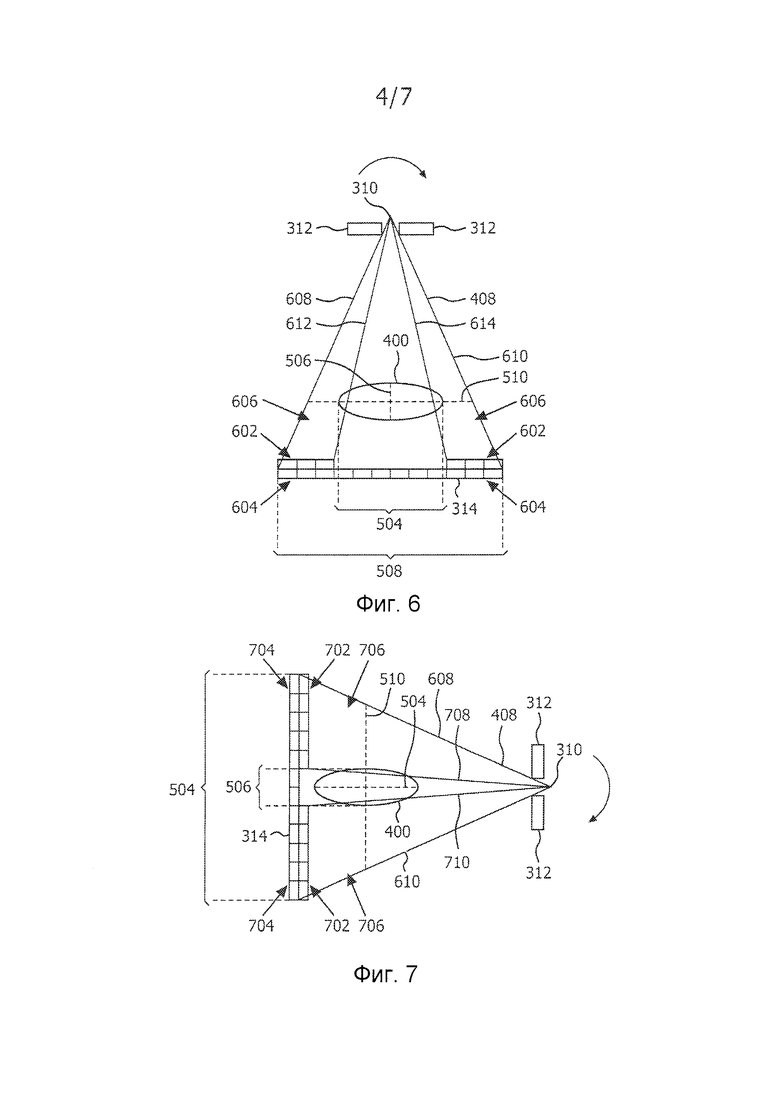
Фиг.5, 6 и 7 изображают пример динамического фильтра, динамически перемещающегося в связи с объектом, и вращающийся источник радиации.
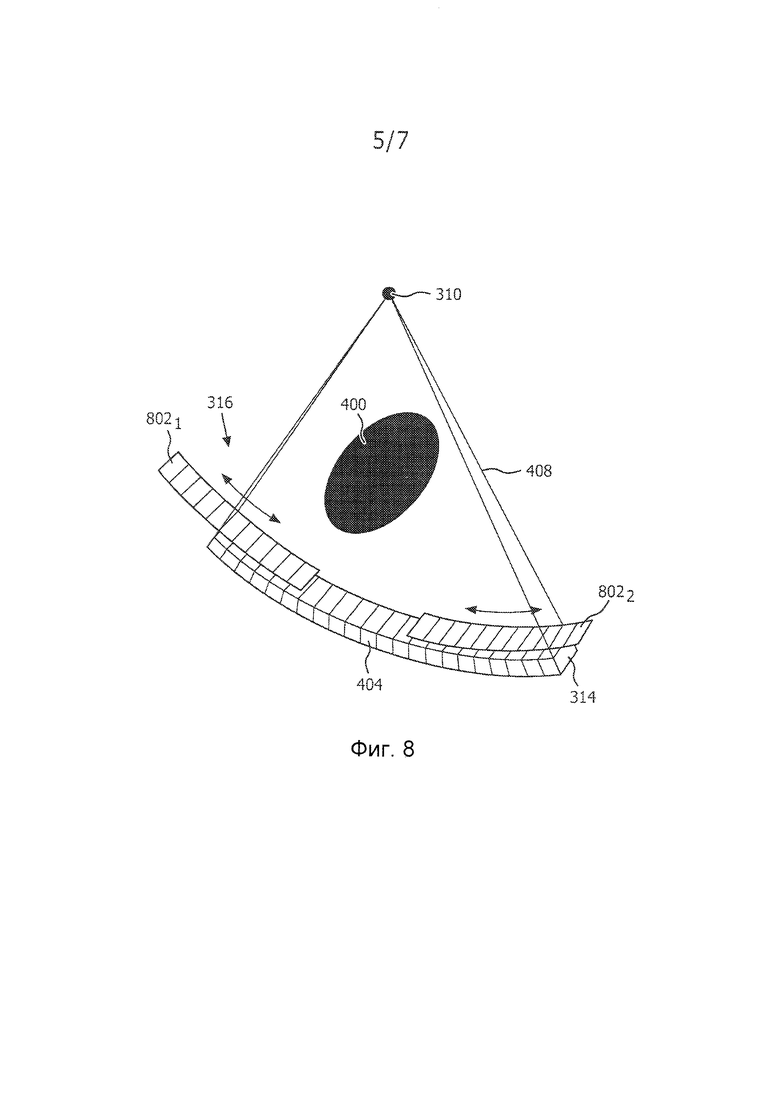
Фиг.8 изображает иллюстративный динамический послепациентный фильтр, в котором фильтр перемещается вдоль направления, поперечного к оси z.
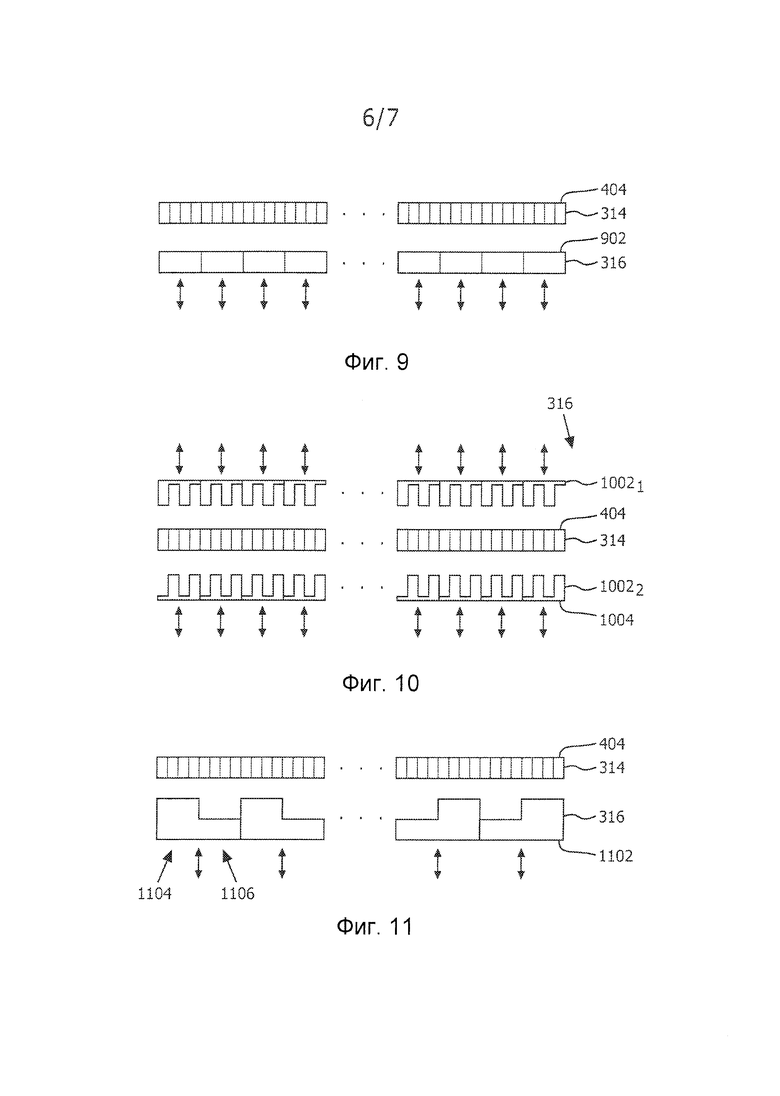
Фиг.9 изображает вариант выполнения, в который динамический послепациентный фильтр включает в себя множество сегментов фильтра, каждый из которых соответствует более чем одному детектирующему пикселю.
Фиг.10 изображает вариант выполнения, в который динамический послепациентный фильтр включает в себя два ряда перемежающихся гребенчатых сегментов фильтра детектора.
Фиг.11 изображает вариант выполнения, в который динамический послепациентный фильтр включает в себя один ряд сегментов фильтра в виде ступенек.
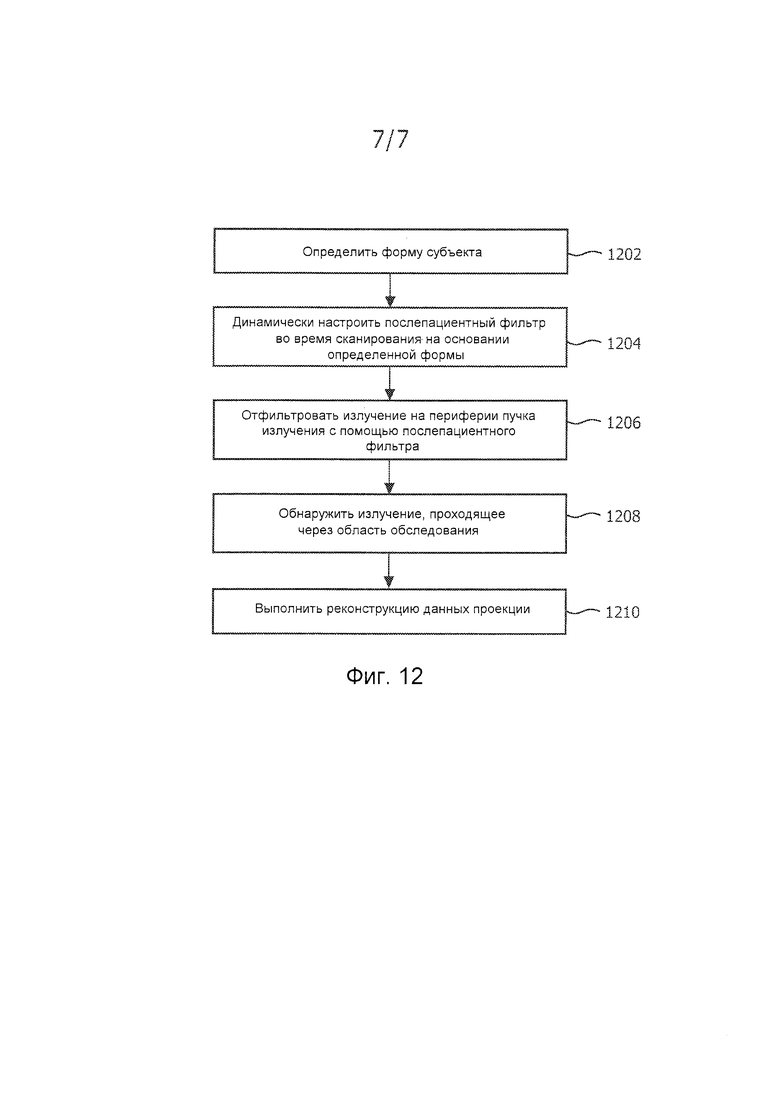
Фиг.12 изображает иллюстративный способ уменьшения потока рентгеновского излучения в периферийных областях пучка излучения, использующий динамический послепациентный фильтр, в котором динамический послепациентный фильтр динамически настраивается для перекрытия подмножества детекторов матрицы детекторов на основании формы сканируемого пациента.
Фиг.3 изображает систему 300 визуализации, такую как сканер компьютерной томографии (CT).
Система 300 визуализации включает в себя стационарное гентри 302 и вращающееся гентри 304, которое поддерживается с возможностью вращения стационарным гентри 302. Вращающееся гентри 304 вращается вокруг области 306 обследования вокруг продольной оси или оси z.
Опора 308, например кушетка, поддерживает субъекта в области обследования 306 и может использоваться для расположения субъекта относительно осей x, y и/или z до, во время и/или после сканирования.
Источник 310 излучения, такой как рентгеновская трубка, удерживается на вращающемся гентри 304, вращается вместе с вращающимся гентри 304 вокруг области 306 обследования и испускает излучение через фокальную точку, которое проходит через область 306 обследования. Коллиматор 312 источника коллимирует испущенное излучение, формируя, как правило, веерообразный, конусообразный или другой формы луч, который пересекает область 306 обследования.
Чувствительная к излучению матрица 314 детекторов расположена напротив источника 310 излучения на противоположной стороне области 306 обследования. Матрица 314 детекторов включает в себя один или более рядов, каждый из которых включает в себя множество детектирующих пикселов, которые обнаруживают излучение, пересекающее область 306 обследования, и формируют данные проекции, указывающие на обнаруженное излучение. Матрица 314 детекторов может включать в себя детекторы со счетом фотонов, с разрешением по энергии и/или интегрирующие детекторы.
Послепациентный динамический фильтр 316 выполнен с возможностью перемещения в и из области перед матрицей детекторов, между матрицей детекторов 314 и областью 306 обследования и на пути пучка излучения, он фильтрует пучок, пересекающий область 306 обследования. Как описано более подробно ниже, динамический фильтр 316 выполнен с возможностью динамически (симметричным или асимметричным образом) настраивать свой физический профиль посредством перемещения одного или более субфильтров или сегментов этого фильтра на основании формы субъекта или объекта, сканируемого во время сканирования.
Динамическая настройка позволяет динамическому фильтру 316 динамически настраиваться на основании профиля каждого пациента, что позволяет динамическому фильтру 316 быть настроенным к профилю каждого субъекта. Таким образом, динамический фильтр 316 может использоваться для фильтрации и/или уменьшения потока рентгеновского излучения на периферии пучка излучения, например, применительно к детекторам со счетом, и/или улучшения эффективности излучения применительно к интегрирующим детекторам. Кроме того, фильтр может быть настроен несимметричным образом, например, когда субъект расположен не по центру.
Перемещение одного или большего количества субфильтров или сегментов фильтра может осуществляться с помощью одного или более двигателей 318, находящихся в механической связи с одним или более субфильтрами или сегментами фильтра, одного или более датчиков положения 320 (например, кодовых датчиков положения), которые определяют положение двигателя, и контроллера 322, который управляет одним или более приводимыми в движение двигателями 318 для перемещения, индивидуально или в заранее заданной комбинации, одного или более субфильтров фильтра или сегментов фильтра вдоль заранее заданного пути, такого как дорожка, направляющая и т.п. Динамический фильтр 316 может использоваться совместно и/или вместо традиционного предпациентного фильтра-бабочки.
Устройство 324 реконструкции реконструирует обработанные данные проекции и формирует данные объемного изображения, показывающие область 306 обследования. Полученные данные объемного изображения могут быть обработаны процессором для обработки изображений и т.п. для формирования одного или более изображений.
Универсальная вычислительная система служит в качестве консоли 326 оператора и включает в себя устройство вывода, такое как дисплей, и устройство ввода данных, такое как клавиатура, мышь и/или тому подобное. Резидентная часть программного обеспечения на консоли 326 позволяет оператору управлять работой системы 300, например, позволяя оператору выбрать протокол, который использует динамический фильтр 316, инициировать сканирование и т.д.
Фиг.4 изображает не ограничивающий пример динамического фильтра 316, связанного с источником 310, матрицей 314 детекторов и сканируемым субъектом 400. В этом примере фильтр 316 включает в себя N субфильтров (или сегментов фильтра) 4021,..., 402N (где N - целое число, больше или равное единице), совместно именуемых здесь субфильтрами 402. Как показано, каждый из субфильтров 402 соответствует одному и отдельному детектирующему пикселю 404 матрицы 314 детекторов.
В этом варианте выполнения двигатель 318 включает в себя субдвигатель для каждого из субфильтров 402, и каждый субдвигатель выборочно и индивидуально перемещает один субфильтр 402 между первым положением 406, в котором фильтр 402 находится за пределами пути пучка 408 излучения, освещающего детектирующий пиксель 404, и вторым положением 410, в котором субфильтр 402 находится перед детектирующим пикселем 404, таким образом фильтруя излучение, освещающее детектирующий пиксель 404.
В другом случае двигатель 318 может включать в себя один двигатель, выполненный с возможностью независимо управлять каждым из субфильтров 402. В еще одном случае двигатель 318 может включать в себя множество двигателей, но меньшее количество, чем число субфильтров 402, с одним или более двигателем 318, выполненным с возможностью управления более чем одним субфильтром 402. В настоящем документе также предусматриваются другие конфигурации двигателей.
В изображенном варианте выполнения двигатель 318 выполнен с возможностью перемещать субфильтр 402 достаточно быстро, чтобы закрыть и/или открыть пиксель в течение одного интервала сбора данных для каждого угла сбора. Например, в одном случае фильтр может перемещаться со скоростью в диапазоне от половины миллиметра в миллисекунду до двух миллиметров в миллисекунду. В данном документе также предусматриваются более быстрые и более медленные скорости.
Могут использоваться различные подходы для определения того, какие субфильтры 402 закрывают детектирующие пиксели 404 во время данного интервала сбора данных. Например, в одном случае выполняется предварительное сканирование (например, предварительное, пробное и т.д.), и полученные данные используются для планирования сканирования, в том числе для определения периметра объекта 400. В другом случае периметр объекта 400 оценивается во время сканирования на основании значений относительной интенсивности обнаруженных данных.
Когда субъект 400 находится в центре области 306 обследования, субфильтры 402 могут управляться симметрично относительно центральной области матрицы детекторов так, чтобы использовалось равное количество субфильтров 402 на обеих сторонах центральной области. В случаях, в которых объект 400 расположен не по центру, субфильтры 402 могут управляться несимметричным образом, в этом случае с обеих сторон центральной области используется различное число субфильтров 402.
Фиг.5, 6 и 7 изображают пример динамичной настройки субфильтров 402 в соответствии с объектом в целом эллиптической формы 400, имеющим ширину 504 и высоту 506. В этом варианте выполнения субфильтры 402 перемещаются в направлении оси z и перпендикулярно направлению пучка 408.
На Фиг.5 пучок 408 коллимируется (через коллиматор 312 или иным образом) так, что ширина 508 пучка 408 в плоскости 510 изображения больше, чем ширина 504 объекта 400, и субфильтры 402 расположены за пределами пучка 408. Эта конкретная конфигурация представлена для пояснительных целей и не является ограничивающей. Например, в другом случае фильтр 316 может закрыть все или часть матрицы 314.
На Фиг.6 источник 310 проходит через положение «12 часов». В этом положении подмножества 602 субфильтров 402 перемещаются над поднаборами 604 детектирующих пикселов матрицы 314 детекторов в соответствии с шириной 504 объекта 400. С субфильтрами 402 как таковыми, части 606 пучка 408 излучения между внешними лучами 608 и 610 и лучами 612 и 614, проходящими на периферии (в пределах и около краев периметра) объекта 400 вдоль ширины 508, фильтруются подмножествами 602 субфильтров 402, прежде чем осветить подмножества 604 детектирующих пикселов.
На Фиг.7 источник 310 проходит через положение «3 часа». В этом положении подмножества 702 субфильтров 402 перемещаются над поднаборами 704 детектирующих пикселов матрицы 314 детекторов в соответствии с высотой 506 объекта 400. С субфильтрами 402 как таковыми, части 706 пучка 408 излучения между внешними лучами 608 и 610 и лучами 708 и 710, проходящими на периферии (в пределах и около краев периметра) объекта 400 вдоль высоты 506 объекта 400, фильтруются подмножествами 702 субфильтров 402, прежде чем осветить подмножества 704 детектирующих пикселов.
Относительно Фиг.5-7 отметим, что профиль субъекта 400 и, следовательно, число субфильтров 402 в подмножествах 602 и 702, расположенных над матрицей 314 детекторов, отличается в положении «12 часов» (Фиг.6) и положении «3 часа» (Фиг.7), причем число субфильтров 420 соответствует профилю субъекта (пациента) 400. Во время сканирования взаимное положение движущихся субфильтров 402 может отслеживаться и/или оцениваться, например, с помощью кодовых датчиков положения и т.п. Кроме того, субфильтры 402 могут непрерывно или дискретно (с заданными равномерными или неравномерными интервалами) динамически настраиваться по мере того, как источник 310 вращается через один или более углов обзора вокруг области 306 обследования.
Фиг.8 изображает другой не ограничивающий пример фильтра 316. В этом примере фильтр 316 разделен на два различных сегмента 8021 и 8022 фильтра, которые перемещаются напротив друг друга в направлении, поперечном к оси z, перпендикулярно направлению пучка 408 и вдоль (кривой или прямой) продольной оси матрицы 314 детекторов. Каждый сегмент фильтра может управляться одним и тем же или разными двигателями. Аналогично, сегменты 8021 и 8022 фильтра перемещаются в соответствии с периметром пациента 400 во время сканирования.
Фиг.9 изображает другой не ограничивающий пример фильтра 316. В этом примере фильтр 316 включает в себя один ряд сегментов 902 фильтра. Каждый из сегментов 902 фильтра соответствует множеству (например, четырем (4) в изображенном примере) детектирующим пикселям 404. Двигатель 318 включает в себя двигатель для каждого из сегментов 902 фильтра, и каждый двигатель выполнен с возможностью перемещать соответствующий сегмент 902 фильтра над и перед или от соответствующего множества детектирующих пикселов.
Фиг.10 изображает другой пример фильтра 316. В этом примере фильтр 316 разделен на два ряда 10021 и 10022 перемежающихся гребенчатых сегментов 1004, причем каждый ряд расположен на противоположных сторонах матрицы 314 детекторов вдоль направления оси z. В этом примере эти два ряда 10021 и 10022 поочередно перемещаются над детектирующими пикселями так, что только один из рядов покрывает соответствующий набор (например, четыре (4) в изображенном примере) детектирующих пикселов 404 в любой момент времени. Таким образом, только каждая вторая группа детектирующих пикселов 404 может быть неиспользуемой, потому что она может включать в себя детектирующие пиксели, лишь частично покрытые рядом для данного интервала сбора данных. Если пиксель лишь частично закрыт фильтром, данные могут быть отброшены, и получены новые данные путем интерполяции данных двух смежных детекторов от нефильтруемых детектирующих пикселов.
Фиг.11 изображает другой не ограничивающий пример фильтра 316. В этом примере фильтр 316 включает в себя один ряд сегментов 1102 фильтра в виде ступенек. В этом варианте выполнения каждый ряд выполнен с возможностью перемещаться по меньшей мере между тремя положениями, первым положением, в котором сегменты находятся не над детектирующими пикселями (как показано), вторым положением, в котором первая часть 1104 сегмента 1102 фильтра покрывает детектирующие пиксели, и третьим положением, в котором первая часть и вторая часть 1106 (или весь сегмент 1102 фильтра) покрывает детектирующие пиксели. В другом варианте выполнения сегменты 1102 фильтра в виде ступенек могут включать в себя более чем две ступеньки (фильтрующих области). Кроме того, сегменты 1102 фильтра в виде ступенек могут также использоваться двухрядным перемежающимся образом, аналогично варианту выполнения по Фиг.10.
Относительно варианта выполнения по Фиг.5-7 варианты выполнения по Фиг.8-12 включают в себя меньшее количество двигателей 318, поскольку каждый сегмент фильтра покрывает более чем один детектирующий пиксел, что может уменьшить количество аппаратных средств (например, двигателей, кодовых датчиков положения и т.д.), габариты аппаратных средств и стоимость аппаратных средств, используемых для перемещения фильтра 316.
Фиг.12 иллюстрирует способ.
Следует иметь в виду, что порядок действий не является ограничивающим. Также в других вариантах выполнения порядок действий может отличаться. Кроме того, одно или более действие может быть опущено, и/или одно или более другое действие может быть добавлено.
На этапе 1202 определяется форма сканируемого пациента (или объекта). Как описано здесь, форма может определяться с помощью предварительного сканирования и/или во время сканирования.
На этапе 1204 динамический послепациентный фильтр динамически настраивается над матрицей детекторов во время сканирования пациента на основании определенной формы.
На этапе 1206 динамический послепациентный фильтр фильтрует излучение, проходящее через области на периферии пучка излучения от лучей внутри и около периметра пациента до внешних лучей пучка излучения.
На этапе 1208 обнаруживается фильтрованное и нефильтрованное излучение, проходящее через область обследования, и формируются данные проекции, характеризующие область обследования.
На этапе 1210 реконструируются данные проекции, в результате чего формируются данные объемного изображения.
Вышеупомянутое может быть реализовано с помощью одного или более процессоров, выполняющих одну или более машиночитаемых инструкций, закодированных на машиночитаемом носителе данных, таком как физическая память. Дополнительно или альтернативно машиночитаемые инструкции могут содержаться в сигнальной или несущей волне.
Следует иметь в виду, что любое уменьшение использования дозы излучения является незначительным, так как фильтр 316главным образом, ослабляет неослабленные рентгеновские лучи и только очень небольшая часть лучей проходит через периферию пациента.
Изобретение было описано со ссылкой на предпочтительные варианты выполнения. Специалистам в области техники могут быть очевидны модификации и изменения после чтения и понимания предыдущего подробного описания. Предполагается, что изобретение включает в себя все такие модификации и изменения, поскольку они находятся в пределах объема прилагаемой формулы изобретения или ее эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИЙ ФИЛЬТР ДЛЯ КОМПЬЮТЕРНОЙ ТОМОГРАФИИ (СТ) | 2011 |
|
RU2589723C2 |
| СОКРАТИТЕЛЬ РЕНТГЕНОВСКОГО ПОТОКА ДЛЯ ДЕТЕКТОРА ПОДСЧЕТА ФОТОНОВ | 2015 |
|
RU2699280C2 |
| ФОРМИРОВАНИЕ СПЕКТРАЛЬНЫХ ИЗОБРАЖЕНИЙ | 2009 |
|
RU2515338C2 |
| СИСТЕМА И СПОСОБ ДЛЯ УЛУЧШЕНИЯ КАЧЕСТВА ИЗОБРАЖЕНИЯ | 2010 |
|
RU2565507C2 |
| ДЕТЕКТОР ДЛЯ ПОДСЧЕТА ФОТОНОВ | 2012 |
|
RU2594602C2 |
| СКАНИРОВАНИЕ В СКВОЗНОМ РЕЖИМЕ | 2007 |
|
RU2452384C2 |
| ДЕТЕКТОР С ЧАСТИЧНО ПРОЗРАЧНОЙ ПОДЛОЖКОЙ СЦИНТИЛЛЯТОРА | 2008 |
|
RU2468392C2 |
| РАДИОГРАФИЧЕСКОЕ УСТРОЙСТВО | 2003 |
|
RU2312327C2 |
| ДЕТЕКТОР РЕНТГЕНОВСКОГО ИЗЛУЧЕНИЯ | 2012 |
|
RU2597655C2 |
| СБОР ИНФОРМАЦИИ | 2010 |
|
RU2536773C2 |
Группа изобретений относится к медицинской технике, а именно к визуализации с помощью компьютерной томографии. Система визуализации содержит источник излучения, чувствительную к излучению матрицу детекторов и динамический послепациентный фильтр, включающий в себя один или более сегментов фильтра, при этом сегменты фильтра выполнены с возможностью перемещения в направлении оси z и перпендикулярно направлению пучка излучения или в направлении, поперечном оси z, и перпендикулярно направлению пучка излучения. Способ уменьшения потока периферийных лучей пучка излучения содержит этапы, на которых выполняют динамическую фильтрацию периферийных лучей во время сканирования объекта или субъекта путем расположения по выбору физических сегментов динамически настраиваемого послепациентного фильтра между матрицей детекторов и областью обследования системы визуализации на основании формы объекта или субъекта. Использование изобретений позволяет увеличить точность выходных данных детекторов излучения. 2 н. и 13 з.п. ф-лы, 12 ил.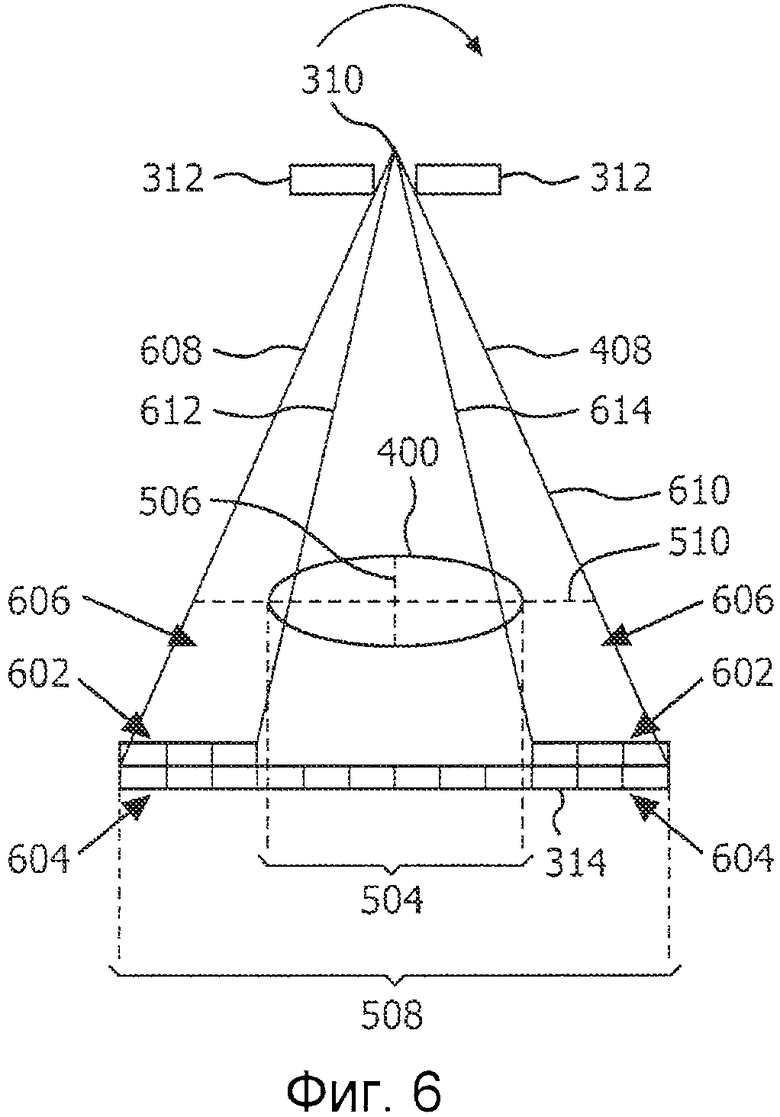
1. Система визуализации, содержащая:
источник излучения, выполненный с возможностью вращаться вокруг области обследования вокруг оси z, включающий в себя фокальную точку, которая испускает пучок излучения, проходящий через область обследования;
чувствительную к излучению матрицу детекторов, включающую в себя множество детектирующих пикселов, которая обнаруживает излучение, проходящее через область обследования, и формирует данные проекции, указывающие на обнаруженное излучение; и
динамический послепациентный фильтр, включающий в себя один или более сегментов фильтра, выполненных с возможностью выборочно и динамически перемещаться перед матрицей детекторов между матрицей детекторов и областью обследования в область и из области на пути пучка излучения, освещающего детектирующие пикселы, во время сканирования объекта или субъекта на основании формы объекта или субъекта, таким образом фильтруя неослабленное излучение и излучение, проходящее через периферию объекта или субъекта, при этом сегменты послепациентного фильтра выполнены с возможностью перемещения в направлении оси z и перпендикулярно направлению пучка излучения, или в направлении, поперечном оси z и перпендикулярно направлению пучка излучения.
2. Система по п. 1, дополнительно содержащая:
по меньшей мере один двигатель для перемещения одного или более сегментов фильтра; и
контроллер, который управляет двигателем для динамического
перемещения одного или более сегментов фильтра в область и из области на пути пучка излучения во время сканирования объекта или субъекта.
3. Система по п. 1, в котором различное число из одного или более сегментов фильтра перемещается перед матрицей детекторов в область и из области на пути пучка излучения на различные интервалы времени сбора данных под различными углами сбора данных на основании формы объекта или субъекта.
4. Система по п. 2, в которой по меньшей мере один двигатель содержит:
отдельный субдвигатель для управления каждым из одного или более сегментов фильтра, при этом каждый сегмент фильтра соответствует отдельному одному из детектирующих пикселов.
5. Система по п. 2, в которой по меньшей мере один двигатель содержит:
по меньшей мере один субдвигатель, который управляет сегментом фильтра, соответствующим более чем одному детектирующему пикселю.
6. Система по п. 1, в которой один или более сегментов фильтра выполнены с возможностью перемещаться в направлении оси z, перпендикулярно пути пучка излучения.
7. Система по п. 1, в которой один или более сегментов фильтра выполнены с возможностью перемещаться в направлении, поперечном оси z, и перпендикулярно пути пучка излучения.
8. Система по п. 1, в которой фильтр включает в себя два ряда перемежающихся гребенчатых сегментов фильтра, которые поочередно перемещаются в область на пути пучка излучения, обеспечивая фильтрацию для чередующихся групп детектирующих пикселов.
9. Система по п. 8, в которой данные измерения детектора, соответствующие частично перекрытому детектирующему пикселу, заменяются данными измерения, полученными от смежных, соседних неперекрытых детектирующих пикселов.
10. Система по п. 1, в которой по меньшей мере один из сегментов фильтра включает в себя две различных области фильтра, каждая из которых соответствует различному числу детектирующих пикселов.
11. Система по п. 10, в которой одна из областей фильтра перемещается перед детектирующими пикселями для фильтрации излучения для первого набора детектирующих пикселов, а другая из областей фильтра перемещается перед детектирующими пикселями для фильтрации излучения для второго набора детектирующих пикселов, который включает в себя большее число детектирующих пикселов и детектирующие пиксели первого набора.
12. Система по п. 1, в которой чувствительная к излучению матрица детекторов включает в себя по меньшей мере один спектральный детектор.
13. Система по п. 1, в которой один или более сегментов фильтра асимметричным образом перемещаются относительно центра матрицы детекторов.
14. Система по п. 1, в которой форма объекта или субъекта определяется на основании предварительного сканирования объекта или субъекта или оценивается во время сканирования на основании значений относительной интенсивности обнаруживаемого излучения.
15. Способ уменьшения потока периферийных лучей пучка излучения, содержащий этапы, на которых:
выполняют динамическую фильтрацию периферийных лучей во время сканирования объекта или субъекта путем расположения по выбору физических сегментов динамически настраиваемого послепациентного фильтра между матрицей детекторов и областью обследования системы визуализации на основании формы объекта или субъекта, при этом сегменты послепациентного фильтра выполнены с возможностью перемещения в направлении оси z и перпендикулярно направлению пучка излучения, или в направлении, поперечном оси z, и перпендикулярно направлению пучка излучения.
| WO 2009063353 A2, 22.05.2009 | |||
| US 2004017879 A1, 29.01.2004 | |||
| УЛЬТРАМАЛОУГЛОВАЯ РЕНТГЕНОВСКАЯ ТОМОГРАФИЯ | 1998 |
|
RU2145485C1 |
| US 7313224 B1, 25.12.2007. | |||

