Нижеописанное изобретение относится к радиологическим технологиям томографической визуализации, технологиям трансмиссионной компьютерной томографии и смежным технологиям.
При томографической визуализации с использованием одного или более подвижных детекторов, детектор или детекторы собирают данные визуализации, когда перемещаются вокруг визуализируемого субъекта для сбора проекций из разных точек наблюдения (иногда называемых «кадрами»). В качестве альтернативы, томографическую визуализацию можно выполнять с использованием кольца стационарных детекторов, как принято при визуализации методом позитронно-эмиссионной томографии (ПЭТ). В случае радиологической томографической визуализации методом магнитного резонанса (МР), детекторы являются радиочастотными приемными катушками, которые обычно (но не обязательно) являются стационарными. Данные томографической визуализации реконструируют с использованием подходящих методов реконструкции изображений для формирования трехмерного изображения субъекта.
В соответствии с методами эмиссионной томографической визуализации, в субъект вводят радиоизлучающее вещество, и один или более детекторов регистрируют радиоизлучение, испускаемое из субъекта. Примером радиоэмиссионной томографической визуализации является ПЭТ. Другим примером данного метода является однофотонная эмиссионная компьютерная томография (ОФЭКТ), в которой обычно применяют одну или более подвижных детекторных головок для регистрации гамма-излучения. Упомянутые методы формируют изображение распределения радиоизлучающего вещества в субъекте, возможно, модифицированного поглощением или рассеянием в субъекте. Некоторые методы реконструкции при эмиссионной визуализации вносят поправку на поглощение в субъекте на основании карты поглощения субъекта.
В соответствии с методами трансмиссионной томографической визуализации, внешний источник излучения посылает излучение сквозь субъект. Детектор излучения расположен напротив источника по другую сторону субъекта для регистрации излучения после прохождения через субъект. Источник излучения и детектор излучения перемещаются совместно вокруг субъекта, с одновременным сохранением их относительно противоположной ориентации. Примером данного метода является трансмиссионная компьютерная томография с плоскопанельным детектором или другой двумерной детекторной матрицей, называемая также конусно-лучевой КТ (компьютерной томографией) (КЛКТ). Данные методы формируют «абсорбционное» изображение, в котором значения вокселей показывают локальную интенсивность поглощения проходящего излучения, которое обычно является рентгеновским излучением. Точность радиологической томографической визуализации зависит от точности калибровки многочисленных аспектов системы визуализации, например, геометрических параметров (например, положения детектора в зависимости от кадра просмотра), коэффициента усиления детектора, эффектов затенения от вспомогательных компонентов, например, противорассеивающих сеток или коллиматоров и т.д. В случае трансмиссионных средств визуализации, дополнительные параметры связаны с источником излучения, например, положением фокусного пятна рентгеновской трубки и интенсивности рентгеновского излучения на выходе.
Калибровка упомянутых параметров обычно выполняется на месте эксплуатации конечным пользователем (например, персоналом больничного радиологического отделения) или эксплуатационным инженером, работающим по найму изготовителя системы визуализации. Калибровку обычно выполняют, когда систему визуализации устанавливают, и повторяют во время работ по модификации или техническому обслуживанию системы визуализации. Калибровочные значения сохраняют в подходящем запоминающем устройстве и вызывают и применяют к собранным радиологическим томографическим данным до или во время реконструкции изображения.
Ниже предлагается описание новых и усовершенствованных устройств и способов в соответствии с настоящим изобретением.
В соответствии с одним аспектом настоящего изобретения, способ содержит следующие этапы: собирают данные визуализации с использованием радиологического устройства томографической визуализации; обновляют калибровку на основании текущей информации о радиологическом устройстве томографической визуализации, чтобы создать обновленную калибровку; калибруют данные визуализации с использованием обновленной калибровки, чтобы сформировать калиброванные данные визуализации; и реконструируют калиброванные данные визуализации, чтобы сформировать изображение. Обновление может быть основано на текущем состоянии недействующих или запаркованных средств визуализации, которые не используют при сборе данных визуализации, или на результате измерения, полученном вместе с данными визуализации, или на самих данных визуализации. В случае данных визуализации методом КЛКТ (КЛКТ-визуализации), калибровка может содержать шаблон сканирования в воздухе, и обновление может содержать определение шкалы интенсивности на основании интенсивности, по меньшей мере, одного воздушного пикселя, измеренного во время сбора данных КЛКТ-визуализации, и обновление шаблона сканирования в воздухе согласно шкале интенсивности.
В соответствии с другим раскрытым аспектом изобретения, система содержит радиологическое устройство томографической визуализации и устройство обработки данных, выполненное с возможностью взаимодействия с радиологическим устройством томографической визуализации для выполнения способа, предложенного в предыдущем абзаце. В соответствии с другим раскрытым аспектом изобретения, носитель информации хранит команды, исполняемые цифровым устройство обработки данных для выполнения способа, предложенного в предыдущем абзаце.
В соответствии с другим раскрытым аспектом изобретения, система содержит: радиологическое устройство томографической визуализации, выполненное с возможностью сбора данных визуализации; калибровочный модуль, выполненный с возможностью обновления калибровки на основании, по меньшей мере, чего-то одного из (i) конфигурации недействующего или запаркованного средства визуализации радиологического устройства томографической визуализации, которое находится в недействующем или запаркованном состоянии во время сбора данных визуализации, (ii) результата измерения, полученного вместе с данными визуализации, и (iii) данных визуализации, и с возможностью калибровки данных визуализации с использованием обновленной калибровки; и модуль реконструкции изображения, выполненный с возможностью реконструкции калиброванных данных визуализации для формирования изображения. В некоторых упомянутых вариантах осуществления, радиологическое устройство томографической визуализации выполнено с возможностью сбора данных визуализации методом конусно-лучевой компьютерной томографии (КЛКТ-визуализации), калибровка содержит, по меньшей мере, один шаблон сканирования в воздухе, и калибровочный модуль выполнен с возможностью обновления шаблона сканирования в воздухе посредством применения шкалы интенсивности, которая может быть вычислена на основании одного или более воздушных пикселей, выделенных из кадра данных КЛКТ-визуализации.
Одно преимущество состоит в повышении точности данных радиологической томографической визуализации и, следовательно, в повышении точности изображений.
Другое преимущество состоит в повышении стабильности радиологической томографической визуализации по сравнению с проведением сеанса визуализации или последовательности сеансов визуализации.
Дополнительные преимущества будут очевидны специалистам в данной области техники из нижеследующего подробного описания.
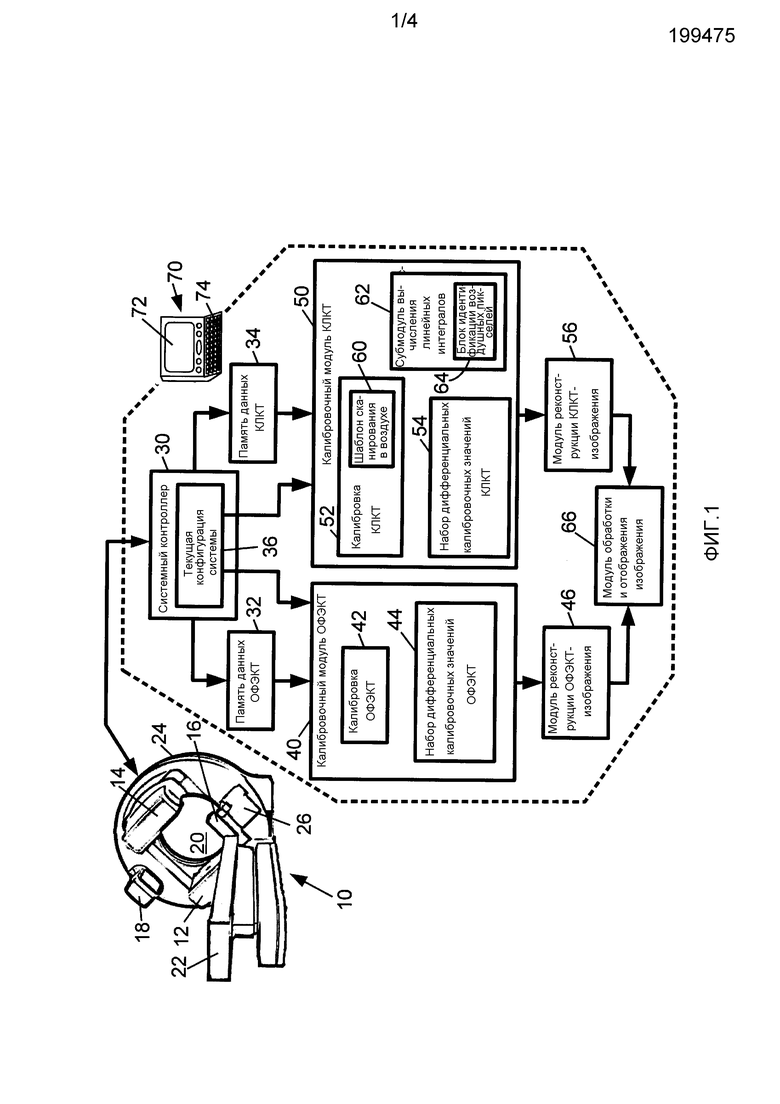
Фиг. 1 - схематическое представление системы визуализации методами ОФЭКТ/КЛКТ, содержащей калибровочные модули ОФЭКТ и КЛКТ, предлагаемые в настоящей заявке.
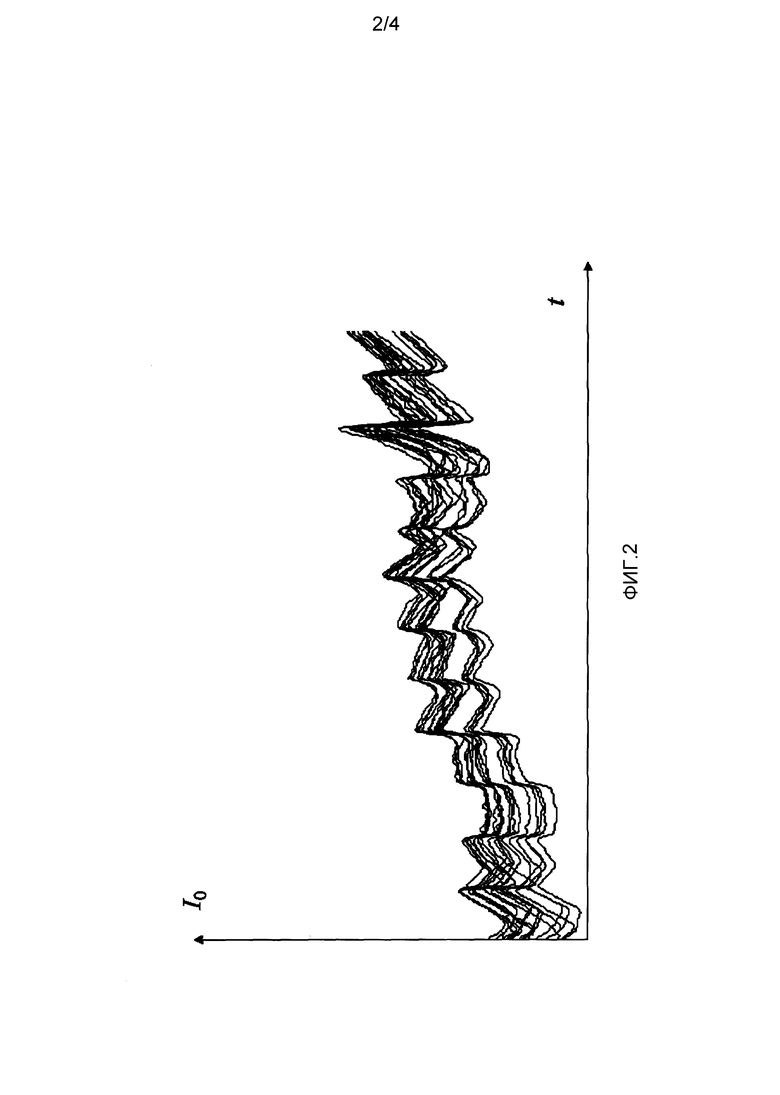
Фиг. 2 - изображение нескольких сканирований в воздухе, обеспечивающих, каждое, график интенсивности Io, измеренной в отсутствие закладки в зависимости от времени сканирования (или, эквивалентно, кадра), для выбранного пикселя детектора, при этом несколько сканирований в воздухе получено с разными предысториями экспозиции детектора.
Фиг. 3 - схематическое представление работы в аспекте межмодальной калибровки калибровочного модуля КЛКТ системы ОФЭКТ/КЛКТ, показанной на фиг. 1.
Фиг. 4 - схематическое представление работы субмодуля линейного интеграла калибровочного модуля КЛКТ системы ОФЭКТ/КЛКТ, показанной на фиг. 1.
Предлагаемые способы калибровки обычно применимы к, по существу, любому одномодальному или мультимодальному радиологическому устройству томографической визуализации. Например, на фиг. 1 изображено мультимодальное устройство 10 ОФЭКТ/КЛКТ-визуализации, которое содержит (1) средство ОФЭКТ-визуализации, содержащее, по меньшей мере, одну детекторную головку для ОФЭКТ (а именно, две детекторных головки 12, 14 для регистрации гамма-излучения в показанном устройстве 10) и (2) средство КЛКТ-визуализации, содержащее двумерную детекторную матрицу 16 и соответствующий источник 18 излучения (например, рентгеновскую трубку), установленный по другую сторону пространства 20 визуализации от детекторной матрицы 16 для КЛКТ. Как детекторные головки 12, 14 для ОФЭКТ, так и рентгеновские детектор/источник 16, 18 для КЛКТ расположены с возможностью визуализации субъекта, расположенного на общем столе или опоре 22 для субъекта. Как средство 12, 14 ОФЭКТ-визуализации, так и средство 16, 18 КЛКТ-визуализации установлены на механической опорной конструкции 24, которая содержит подходящие механические соединения, поворотные рамы и т.д. для создания возможности согласованного вращения детекторных головок 12, 14 для регистрации гамма-излучения вокруг визуализируемого субъекта, расположенного на столе 22, и для создания возможности согласованного поворота противоположных источника 18 излучения и детекторной матрицы 16 вокруг субъекта на столе 22. Наглядным устройством 10 ОФЭКТ/КЛКТ-визуализации является система Brightview™ XCT для ОФЭКТ/КТ-визуализации (компании Koninklijke Philips Electronics N.V., Eindhoven, Нидерланды).
Механическая опорная конструкция 24 наглядной системы Brightview™ XCT для ОФЭКТ/КТ-визуализации предоставляет детекторным головкам 12, 14 для ОФЭКТ множество степеней подвижности, например, допускающих сканирование, при котором детекторные головки 12, 14 для ОФЭКТ ориентированы одна относительно другой либо под углом 90°, либо под углом 180°, допускающих независимое перемещение детекторных головок 12, 14 для ОФЭКТ к субъекту или от него, с обеспечением согласованного вращения, допускающих визуализацию субъекта, при нахождении стола 22 в различных положениях и т.д. В другом рабочем режиме ОФЭКТ применяют только одну детекторную головку для ОФЭКТ, чтобы выполнять планарное сканирование, например, при сканировании для визуализации костей всего тела. Во время ОФЭКТ-визуализации, детекторную матрицу 16 средства КЛКТ-визуализации можно повернуть или запарковать в выемку 26 механической опорной конструкции 24, чтобы упомянутая матрица не мешала движению детекторных головок 12, 14 для ОФЭКТ. Средство ОФЭКТ-визуализации выполнено также с возможностью содержания различных коллиматоров (не показанных), оптимизированных для различных типов визуализирующего сканирования и установленных на принимающих излучение поверхностях детекторных головок 12, 14. Механическая опорная конструкция 24 наглядной системы Brightview™ XCT для ОФЭКТ/КТ-визуализации обеспечивает также значительную эксплуатационную гибкость средства 16, 18 КЛКТ-визуализации. Например, на принимающей излучение поверхности детекторной матрицы 16 можно устанавливать различные антирассеивающие сетки (не показанные) для подавления рентгеновского излучения, рассеянного в сканируемом субъекте. Наглядная детекторная матрица 16 средства системы Brightview™ XCT визуализации является плоскопанельным детектором и расположена геометрически со смещением от центра. Источник 18 излучения (рентгеновская трубка в наглядной системе Brightview™ XCT для ОФЭКТ/КТ-визуализации) может действовать при различных уровнях яркости для оптимизации сигнала, при ограничении поглощения излучения субъектом.
В дополнение к различным конфигурациям, выбираемым пользователем, наглядное мультимодальное радиологическое устройство 10 томографической визуализации может характеризоваться дрейфом рабочих параметров в зависимости от предыстории применения. Например, яркость и/или положение фокусного пятна пучка, генерируемого источником 18 излучения, может изменяться в зависимости от нагрузки, температуры и предыстории применения трубки. Детекторная матрица 16 для КЛКТ может характеризоваться дрейфом различных типов в зависимости от последней предыстории ее экспозиции, например, яркостного выгорания, вызываемого заполнением центров захвата в сцинтилляторе (в наглядной системе Brightview™ XCT для ОФЭКТ/КТ-визуализации применен сцинтиллятор на основе кристалла Csl с игольчатой структурой). Обычно, радиологическое устройство 10 томографической визуализации калибруется на месте эксплуатации конечным пользователем (например, персоналом больничного радиологического отделения) или эксплуатационным инженером, работающим по найму изготовителя системы визуализации. Упомянутую калибровку обычно выполняют, когда устройство 10 визуализации устанавливают, и повторяют во время различных работ по модификации или техническому обслуживанию.
Однако в настоящем описании показано, что вышеописанный способ калибровки имеет существенные недостатки. Калибровка может не обеспечить учета влияния текущих условий системы визуализации или предыстории эксплуатации системы визуализации на текущий сбор данных визуализации. Например, детекторная матрица 16 для КЛКТ может обнаруживать эффекты «памяти», обусловленные недавней предысторией экспозиции мощным рентгеновским излучением. Упомянутые эффекты памяти могут оказаться неучтенными в калибровке, полученной с использованием детекторной матрицы 16, после отличающейся недавней предыстории экспозиции.
Кроме того, в настоящем описании показано, что данные визуализации, полученные одним средством (например, КЛКТ) могут испытывать влияние текущего состояния другого средства (например, ОФЭКТ). Например, тип коллиматора, установленного на детекторных головках 12, 14 для ОФЭКТ, может влиять на положение детекторной матрицы 16 для КЛКТ и/или источника 18 излучения во время КЛКТ-визуализации. Аналогично, «запаркованное» положение детекторных головок 12, 14 для ОФЭКТ во время КЛКТ-визуализации может повлиять на данные КЛКТ-визуализации. Упомянутые «межмодальные» эффекты невозможно скорректировать, если данные визуализации собирают, когда система визуализации, не действующая в данное время, находится в состоянии, отличающемся от состояния, использованного при сборе данных калибровки. В качестве наглядного примера, калибровка КЛКТ, полученная, когда средство для ОФЭКТ запарковано в одной конфигурации, не может точно корректировать данные КЛКТ-визуализации, собранные, когда средство для ОФЭКТ запарковано в отличающейся конфигурации.
Соответственно, способы калибровки, предлагаемые в настоящей заявке, обновляют калибровку для активного средства визуализации на основании текущей информации о недействующем или «запаркованном» средстве визуализации во время сбора данных визуализации активным средством визуализации. Данные визуализации, собранные активным средством визуализации калибруются с использованием обновленной калибровки, и калиброванные данные визуализации реконструируются для формирования изображения. В некоторых вариантах осуществления, обновление калибровки содержит выбор конфигурационно-зависимой дифференциальной калибровки, соответствующей конфигурации неактивного или запаркованного средства визуализации во время сбора данных, и обновление калибровочных параметров калибровки активного средства дифференциальными калибровочными значениями дифференциальной калибровки для формирования обновленной калибровки. В некоторых вариантах осуществления, калибровочные параметры обновляются на основании, по меньшей мере, чего-то одного из (i) конфигурации неактивного или запаркованного радиологического устройства томографической визуализации во время сбора данных визуализации, (ii) результата измерения, полученного вместе с данными визуализации, и (iii) данных визуализации. Например, в случае КЛКТ-визуализации, в некоторых вариантах осуществления, обновление калибровки содержит обновление калибровочного параметра калибровки КЛКТ дифференциальным калибровочным значением на основании температуры рентгеновской трубки, обеспеченной результатом измерения температурного датчика, полученным вместе с данными КЛКТ-визуализации. В некоторых вариантах осуществления, обновление калибровки содержит обновление калибровочного параметра калибровки КЛКТ дифференциальным калибровочным значением на основании аспекта конфигурации неактивного или запаркованного средства 12, 14 для ОФЭКТ, например, типа установленного коллиматора, или положения детекторных головок 12, 14 для ОФЭКТ. В некоторых вариантах осуществления, данные визуализации собирают методом КЛКТ, и обновление калибровки содержит обновление шаблона сканирования в воздухе на основании интенсивности, по меньшей мере, одного воздушного пикселя, измеренной во время сбора данных КЛКТ-визуализации, или вычисленной по предыстории экспозиции детектора 16 излучения. Обновленный шаблон сканирования в воздухе задает интенсивность при нулевом ослаблении (Io) для вычисления линейного интеграла поглощения.
Как также показано на фиг. 1, системный контроллер 30 управляет радиологическим устройством 10 томографической визуализации для сбора данных визуализации. Данные ОФЭКТ-визуализации, собранные средством 12, 14 ОФЭКТ-визуализации, соответственно сохраняются в памяти 32 данных ОФЭКТ, а данные КЛКТ-визуализации, собранные средством 16, 18 КЛКТ-визуализации, соответственно сохраняются в памяти 34 данных КЛКТ. Следует отметить, что, хотя элементы памяти 32, 34 данных показаны на фиг. 1 в виде отдельных элементов, в некоторых вариантах осуществления, общая физическая память может быть организована в файлы, каталоги, папки, пространства памяти или иначе разделено логически для разграничения элементов памяти 32, 34 данных. Системный контроллер 30 хранит также текущую конфигурацию 36 системы, содержащую такие параметры конфигурации, как дополнительные устройства, установленные на детекторах излучения, (например, тип коллиматоров, установленных на детекторных головках 12, 14 для ОФЭКТ, или отсутствие коллиматоров, или тип антирассеивающей сетки, установленной на детекторной матрице 16 для КЛКТ, или отсутствие упомянутой сетки), относительная расстановка детекторных головок 12, 14 для ОФЭКТ (например, смещение на 90°, смещение на 180° и т.д.), указание, запаркована ли детекторная матрица 16 для КЛКТ в выемке 26 для хранения, текущий выбор визуализирующего сканирования и т.д.
В случае данных ОФЭКТ, калибровочный модуль 40 ОФЭКТ обновляет калибровку 42 ОФЭКТ на основании набора дифференциальных калибровочных значений 44 ОФЭКТ. Некоторые из упомянутых дифференциальных калибровочных значений 44 ОФЭКТ могут быть внутримодальными дифференциальными калибровочными значениями ОФЭКТ, которые обновляют калибровку 42 ОФЭКТ для учета различий между текущей конфигурацией ОФЭКТ и конфигурацией ОФЭКТ во время создания калибровки 42 ОФЭКТ. Кроме того, некоторые из упомянутых дифференциальных калибровочных значений 44 ОФЭКТ являются межмодальными дифференциальными калибровочными значениями ОФЭКТ, которые учитывают воздействие различий между текущей конфигурацией КЛКТ и конфигурацией КЛКТ во время создания калибровки 42 ОФЭКТ на данные ОФЭКТ-визуализации. Затем полученная обновленная калибровка ОФЭКТ применяется к данным ОФЭКТ посредством калибровочного модуля 40 ОФЭКТ для формирования калиброванных данных ОФЭКТ-визуализации. Модуль 46 реконструкции ОФЭКТ реконструирует калиброванные данные ОФЭКТ-визуализации для формирования ОФЭКТ-изображения.
В случае данных КЛКТ, калибровочный модуль 50 КЛКТ обновляет калибровку 52 КЛКТ на основании набора дифференциальных калибровочных значений 54 КЛКТ. Некоторые из упомянутых дифференциальных калибровочных значений 54 КЛКТ могут быть внутримодальными дифференциальными калибровочными значениями КЛКТ, которые обновляют калибровку 52 КЛКТ для учета различий между текущей конфигурацией КЛКТ и конфигурацией КЛКТ во время создания калибровки 52 КЛКТ. Кроме того, некоторые из упомянутых дифференциальных калибровочных значений 54 КЛКТ являются межмодальными дифференциальными калибровочными значениями КЛКТ, которые учитывают воздействие различий между текущей конфигурацией ОФЭКТ и конфигурацией ОФЭКТ во время создания калибровки 52 КЛКТ на данные КЛКТ-визуализации. Затем полученная обновленная калибровка КЛКТ применяется к данным КЛКТ посредством калибровочного модуля 50 КЛКТ для формирования калиброванных данных КЛКТ-визуализации, которые реконструируются модулем 56 реконструкции КЛКТ для формирования рентгеновского компьютерного томографического (РКТ-) изображения.
Предлагаемое положение для межмодальных дифференциальных калибровочных значений основано на представлении, что данные визуализации, полученные активным средством, могут испытывать влияние текущей конфигурации неактивного (или запаркованного) средства. Если неактивное средство можно запарковать или оставлять недействующим в различных конфигурациях (как в случае, например, при парковании детекторных головок 12, 14 для ОФЭКТ в системе Brightview™ XCT для ОФЭКТ/КТ-визуализации в процессе КЛКТ-визуализации), то возможно, что текущая конфигурация неактивного средства может отличаться от конфигурации неактивного средства в то время, когда создавали калибровку активного средства. Межмодальные дифференциальные калибровочные значения позволяют корректировать упомянутое дифференциальное влияние на активное средство.
В случае КЛКТ, калибровочный модуль 50 выполняет также дополнительную калибровку следующим образом. Данные КЛКТ-визуализации в собранном виде являются результатами измерения интенсивности I, которые преобразуются в результаты измерения поглощения перед операцией реконструкции.
Преобразование выполняется по закону Бугера-Ламберта-Бера: 

Чтобы вычислить линейный интеграл, следует знать значение Io. Для этого, калибровка 52 КЛКТ содержит шаблон 60 сканирования в воздухе, который формируется посредством сбора данных КЛКТ-визуализации, в отсутствие помещенного образца (и после выведения стола 22, если стол поглощает рентгеновское излучение). В таком случае, все измеренные I=Io. Шаблон 60 сканирования в воздухе измеряют для всех кадров (то есть, всех точек наблюдения) и для каждого пикселя детектора детекторной матрицы 16 для КЛКТ, так как Io может изменяться для разных пикселей детектора и для разных кадров. Как также показано на фиг. 1, в настоящей заявке принято также считать, что значения шаблона 60 сканирования в воздухе могут содержать ошибки вследствие различных источников дрейфа Io. Например, значение Io может зависеть от изменения яркости пучка, сформированного источником 18 излучения, (на которую, в свою очередь, может влиять тепловая нагрузка трубки или температура трубки, и/или преднамеренная регулировка тока пучка). Значение Io может также испытывать влияние яркостного выгорания, вызываемого заполнением центров захвата в сцинтилляторе. Величина яркостного выгорания зависит от недавней предыстории экспозиции детекторной матрицы 16.
Как видно из фиг. 2, в настоящей заявке принято считать, что дрейф Io, обычно, можно представить коэффициентом пересчета (по меньшей мере, с точностью до первого порядка), который является постоянным по всему детектору (то есть, для всех пикселей детектора) и по всем кадрам. Например, на фиг. 2 показано несколько сканирований в воздухе, обеспечивающих, каждое, график интенсивности Io, измеренной в отсутствие закладки в зависимости от времени сканирования (или, эквивалентно, кадра), для выбранного пикселя детектора, при этом, несколько сканирований в воздухе получено с разными предысториями экспозиции детектора. Как показано, Io изменяется с экспозицией детектора, но изменяется одинаково для всех кадров. В результате, дрейф Io можно компенсировать, приблизительно, постоянной шкалой интенсивности для Io, которая не зависит от пикселя детектора и кадра.
Как показано на фиг. 1, с учетом вышеприведенных соображений, изложенных со ссылкой на фиг. 2, калибровочный модуль 50 КЛКТ дополнительно содержит модуль 62 вычисления линейных интегралов, который вычисляет линейные интегралы для данных КЛКТ-визуализации. При вычислении линейных интегралов, модуль 62 вычисления линейных интегралов обновляет шаблон 60 сканирования в воздухе посредством применения постоянной шкалы интенсивности к значениям изображения или постоянного смещения к линейным интегралам. Поскольку постоянное аддитивное смещение линейных интегралов преобразуется в, приблизительно, постоянное аддитивное смещение реконструированного изображения, то соответственно пересчитанное смещение можно дополнительно применять после реконструкции объемного РКТ-изображения. В одном подходящем варианте осуществления, блок 64 идентификации воздушных пикселей просматривает полученные данные КЛКТ-визуализации для идентификации одного или более «воздушных пикселей», то есть результатов измерения пикселей детектора, для которых определяется, что поглощение отсутствует, и, следовательно, I=Io. После того как воздушный пиксель идентифицируется блоком 64 идентификации воздушных пикселей, его значение сравнивается с соответствующим пикселем соответствующего кадра шаблона 60 сканирования в воздухе, и отношение между упомянутыми значениями является постоянной шкалой интенсивности. Затем, обновленный таким образом шаблон сканирования в воздухе используется модулем 62 вычисления линейных интегралов для обеспечения значений Io при вычислении значений линейных интегралов по результатам измерения интенсивности I КЛКТ. В альтернативном варианте осуществления, к реконструированному объему можно применять коэффициент пересчета в качестве постоянного смещения, вычисленный по идентифицированному отношению между измеренными воздушными пикселями и Io из калибровки.
Как также показано на фиг. 1, модуль 66 обработки и отображения изображения соответственно обрабатывает и/или отображает ОФЭКТ-изображение, КЛКТ-изображение или синтез или другое сочетание ОФЭКТ- и КЛКТ-изображений. Различные компоненты 30, 40, 46, 50, 56, 66 обработки соответственно реализованы цифровым устройством 70 обработки данных (по желанию, дополненным аналоговыми или гибридными цифровыми/аналоговыми схемами, реализованными специализированными интегральными схемами или ASIC или другими аналоговыми или гибридными компонентами). Наглядное цифровое устройство обработки данных является наглядным компьютером 70, который содержит или имеет доступ к накопителю на жестком магнитном диске, оперативной памяти (RAM), флэш-памяти, оптической памяти или другому запоминающему устройству или компоненту для хранения данных (или их комбинации), соответственно реализующим компоненты 32, 34 памяти и соответственно хранящим текущую конфигурацию 36 системы и калибровки 42, 44, 52, 54, 60. Компьютер или другое цифровое устройство 70 обработки данных может также содержать или иметь доступ к устройству 72 отображения, посредством которого модуль 66 обработки и отображения изображения отображает реконструированные изображения. Компьютер или другое цифровое устройство 70 обработки данных может также содержать или иметь доступ к клавиатуре или другому устройству или устройствам 74 пользовательского ввода, посредством которой(ых) радиолог или другой пользователь может взаимодействовать с системой для управления радиологическим устройством 10 томографической визуализации, чтобы собирать данные визуализации и калибровать и реконструировать данные визуализации, и отображать реконструированные изображения. Следует также понимать, что раскрытые методы калибровки могут осуществляться посредством носителя данных (например, магнитного носителя, например, накопителя на жестком магнитном диске или такого электронного носителя данных, как RAM или флэш-память, или оптической памяти и т.д.), хранящего команды, исполняемые цифровым устройством 70 обработки данных для выполнения различных способов, предложенных в настоящей заявке.
На фиг. 3 представлен наглядный пример аспекта обновления межмодальной калибровки калибровочным модулем 50 КЛКТ. Калибровочный модуль 50 выполняет операцию 80, в процессе которой параметры конфигурационно-зависимой межмодальной дифференциальной калибровки КЛКТ выбираются из набора конфигурационно-зависимых дифференциальных калибровок 54 КЛКТ на основании текущей конфигурации средства ОФЭКТ, в соответствии с текущей конфигурацией 36 системы. Другими словами, операция 80 выбирает межмодальные дифференциальные параметры КЛКТ, которые компенсируют влияние аспектов текущего состояния недействующей или запаркованной системы ОФЭКТ на активную КЛКТ-визуализацию. Упомянутые аспекты могут содержать тип коллиматора, установленного на детекторных головках 12, 14 для ОФЭКТ, калибровку положения детекторных головок 12, 14 для ОФЭКТ и т.д.
В ходе операции 82 создается обновленная калибровка КЛКТ посредством выполнения, для каждого калибровочного параметра КЛКТ, дифференциального обновления, например, умножения значения калибровочного параметра, полученного из (базовой) калибровки 52 КЛКТ, на конфигурационно-зависимый(ые) дифференциальный(й) коэффициент или коэффициенты, обеспеченные выбранной конфигурационно-зависимой дифференциальной калибровкой КЛКТ, или добавления смещения или смещений, обеспеченных дифференциальной калибровкой и т.д. Когда в один параметр конфигурации следует вносить две или более разных дифференциальных поправок (например, одну дифференциальную поправку вследствие рабочей температуры и другую дифференциальную поправку из-за типа текущего установленного коллиматора ОФЭКТ), то упомянутые поправки можно вносить различными способами, например, сначала суммированием дифференциальных поправок и затем умножением на сумму. В альтернативном варианте, калибровочный параметр можно умножать на каждую дифференциальную поправку последовательно. На практике, дифференциальная(ые) поправка или поправки, обычно, невелики, и поэтому оба способа будут давать аналогичные результаты. Дифференциальные коэффициенты, которые применяют как аддитивные смещения, могут применяться совместно.
Затем, в ходе операции 84, обновленная калибровка КЛКТ, созданная в ходе операции 82, применяется к данным КЛКТ-визуализации для формирования калиброванных данных КЛКТ-визуализации, которые затем реконструируются модулем 56 реконструкции КЛКТ-изображения. Применение каждого калибровочного параметра зависит от типа выполняемой калибровки. Например, калибровочный параметр положения детектора может быть смещением положения, которое применяют аддитивно, а калибровка интенсивности может применяться мультипликативно.
На фиг. 3 изображен калибровочный модуль 50 КЛКТ, однако, калибровочный модуль 40 ОФЭКТ работает аналогичным образом. Выбор конфигурационно-зависимой дифференциальной калибровки также может учитывать межмодальные аспекты конфигурации, которые, в данном случае, отражают влияние конфигурации средства 16, 18 КЛКТ-визуализации на данные ОФЭКТ-визуализации. Например, на точное положение детекторных головок 12, 14 для ОФЭКТ может влиять тот факт, запаркован ли детектор 16 в выемке 26 или остается в выдвинутом положении.
При построении набора конфигурационно-зависимых дифференциальных калибровок 44, 54 идентифицируются изменения состояния системы, которые вызывают изменения калибровки 42, 52. В наглядном примере, некоторые возможные релевантные изменения состояния системы включают в себя: изменения геометрии системы в целом, при смене коллиматоров для ОФЭКТ в системе ОФЭКТ/КЛКТ; изменения геометрии системы в целом, при изменении относительного положения детекторов для ОФЭКТ (например, между 90° относительным положением и 180° относительным положением) в системе ОФЭКТ/КЛКТ; изменения положения фокусного пятна рентгеновской трубки в зависимости от нагрузки и температуры трубки; изменения геометрии системы в целом, при смене антирассеивающей сетки в устройстве формирования рентгеновских изображений с C-образной консолью; изменения геометрии системы в целом, вызванные тяжелым пациентом; и т.д. Предполагается, что изменения геометрии системы или положения рентгеновского фокусного пятна должны наиболее сильно влиять на геометрическую калибровку и поворотную поправку коэффициента усиления, представляющую изменяющееся затенение антирассеивающей сетки и формирователя пучка.
После того как идентифицируются изменения состояния системы, имеющие отношение к калибровке, создаются наборы конфигурационно-зависимых дифференциальных калибровок 44, 54. Согласно одному подходящему методу, затронутые калибровочные параметры калибровок 42, 52 измеряются в различных изменяющихся состояниях устройства визуализации один раз до или во время установки устройства 10 визуализации. По полученным данным, относительное или абсолютное изменение калибровочной информации, обусловленное изменениями состояния устройства визуализации, определяется и используется для построения наборов конфигурационно-зависимых дифференциальных калибровок 44, 54. Для межмодальной дифференциальной калибровки, например, калибровки влияния разных конфигураций средства ОФЭКТ на данные КЛКТ, калибровочные параметры КЛКТ измеряют с детекторными головками 12, 14 для ОФЭКТ, находящимися в разных положениях, и с разными установленными коллиматорами и т.д., чтобы количественно измерять влияния упомянутых различных конфигураций средства ОФЭКТ на калибровочные параметры КЛКТ.
Если базовые калибровки 42, 52 подлежат изменению путем повторной калибровки, упомянутые повторные калибровки выполняют в одной фиксированной, предварительно заданной конфигурации системы (например, при низкой температуре трубки, определенном коллиматоре для ОФЭКТ в системе КЛКТ, и при отсутствии весовой нагрузки пациента на стол). Для сеанса визуализации учитывается текущее состояние устройства 10 визуализации, и самая последняя калибровка 42, 52 обновляется в соответствии с выбранной конфигурационно-зависимой дифференциальной калибровкой, перед калибровкой данных визуализации.
Наглядный пример субмодуля 62 вычисления линейных интегралов поясняется со ссылкой на фиг. 4. Линейные интегралы получают с использованием значений Io, обеспечиваемых шаблоном 60 сканирования в воздухе. В общем, отдельный шаблон 60 сканирования в воздухе получают для каждого отдельного типа сбора данных КЛКТ. Для разных компоновок биннинга пикселей, при использовании коллиматоров разных типов или при использовании разных настроек энергии (например, разных пиковых напряжений в кВ, разной фильтрации или клина) и т.д., могут потребоваться разные шаблоны сканирования в воздухе. Каждый шаблон сканирования в воздухе создается посредством сканирования в воздухе, содержащего сбор данных с фиксированной экспозицией, при отсутствии поглощающего материала в поле обзора. Данное сканирование обеспечивает эффективную интенсивность на детекторе в виде функции от угла поворота рамы (или кадра) и мА (или мА·с) для каждого метода.
Однако шаблон 60 сканирования в воздухе (или даже разные шаблоны сканирования в воздухе для разных типов сбора данных КЛКТ) не учитывает дрейфа Io, вызываемого яркостным выгоранием или недавней предысторией экспозиции детекторной матрицы 16. В качестве наглядного примера, на фиг. 2 показано несколько шаблонов сканирования в воздухе, полученных с одинаковой экспозицией, но с разной предысторией экспозиции детектора. Для коррекции приведенных эффектов, субмодуль 62 вычисления линейных интегралов активизирует блок 64 идентификации воздушных пикселей для идентификации одного или более воздушных пикселей в собранных данных КЛКТ-визуализации. Блок 64 идентификации воздушных пикселей может обнаруживать воздушные пиксели различными способами, например: (1) способом определения пороговой величины на основании минимального ожидаемого значения интенсивности; (2) способом идентификации пикселей, формирующих малый локальный градиент (возможно, в сочетании с определением пороговой величины); (3) способом идентификации проекций, в которых, с учетом априорной информации, например, формы или максимального размера визуализируемого субъекта, не ожидается никакого поглощения; (4) постоянство значений в нескольких кадрах; и т.д. В ходе операции 90 принятия решения, выполняется определения, идентифицированы ли какие-нибудь воздушные пиксели. Если идентифицированы, то, в ходе операции 92, воздушный пиксель или воздушные пиксели служат для установки постоянного коэффициента пересчета интенсивности для обновления шаблона сканирования в воздухе. Для данного воздушного пикселя идентифицируют соответствующий пиксель в соответствующем кадре шаблона 60 сканирования в воздухе, и отношение между значением в воздухе и значением шаблона является постоянной шкалой интенсивности. Если блок идентификации воздушных пикселей идентифицирует более одного воздушного пикселя, то упомянутый процесс можно повторить для каждого воздушного пикселя, и полученное множество постоянных значений шкалы интенсивности можно усреднить или объединить иным методом. После того как в ходе операции 92 установлена шкала интенсивности, шаблон сканирования в воздухе обновляется в ходе операции 94 посредством применения шкалы интенсивности ко всем значениям шаблона сканирования в воздухе. Полученный обновленный шаблон сканирования в воздухе применяется при вычислении значений линейных интегралов для данных КЛКТ в ходе операции 96.
Если решение в результате операции 90 показывает, что в собранных данных КЛКТ-визуализации не обнаружен подходящий воздушный пиксель, то можно следовать по альтернативному пути, указанному на фиг. 4 пунктирными линиями. В ходе операции 98, которая является альтернативой операции 92, шкала интенсивности устанавливается на базе иного критерия, чем идентифицированный воздушный пиксель. Например, шкала интенсивности может быть установлена на основе недавних собранных данных сканирования или может быть оценена по данным предыстории экспозиции и т.д. В альтернативном варианте, операция 98 может установить шкалу интенсивности равной единице (при этом, фактически, не выполняется никакой коррекции в отношении яркостного выгорания или другого дрейфа Io). В каждом случае, обработка данных соответственно переходит к операции 94 для применения тождественности или другой альтернативной постоянной шкалы интенсивности.
Раскрытые методы калибровки описаны со ссылкой на наглядное устройство 10 ОФЭКТ/КЛКТ-визуализации, показанное на фиг. 1. В общем, следует понимать, что раскрытые методы калибровки можно применить к любому одномодальному или мультимодальному радиологическому устройству томографической визуализации, например, одномодальному устройству ОФЭКТ, одномодальному устройству ПЭТ, одномодальному устройству компьютерной томографии (КТ) (например, КЛКТ, КТ с веерными пучками и т.д.), одномодальному устройству МР-визуализации, двухмодальному или мультимодальному устройству, реализующему два или более разных средств визуализации, например, ОФЭКТ, ПЭТ, КТ или МР. Кроме того, в случае калибровки данных КЛКТ, предполагается возможность применения конфигурационно-зависимой дифференциальной калибровки КЛКТ, без применения, при этом коррекции шаблона сканирования в воздухе (выполняемой субмодулем 62). Напротив, в случае данных КЛКТ, предполагается также возможность применения коррекции шаблона сканирования в воздухе, без применения, при этом конфигурационно-зависимой дифференциальной калибровки КЛКТ. В случае устройства ОФЭКТ/КЛКТ, предполагается возможность применения конфигурационно-зависимой дифференциальной калибровки КЛКТ и/или коррекции шаблона сканирования в воздухе, без применения, при этом, конфигурационно-зависимой дифференциальной калибровки ОФЭКТ или наоборот.
В настоящей заявке приведено описание одного или более предпочтительных вариантов осуществления. После прочтения и изучения вышеприведенного подробного описания, специалистами могут быть созданы модификации и изменения. Предполагается, что заявку следует интерпретировать как содержащую все упомянутые модификации и изменения в такой мере, в которой они находятся в пределах объема притязаний прилагаемой формулы изобретения или ее эквивалентов.


Группа изобретений относится к медицинской технике, а именно к радиологическим технологиям томографической визуализации. Способ томографической визуализации содержит этапы, на которых собирают данные визуализации с использованием активного средства визуализации, обновляют калибровку на основании текущей информации о радиологическом устройстве томографической визуализации, калибруют данные визуализации с использованием обновленной калибровки и реконструируют калиброванные данные визуализации, чтобы сформировать изображение. Система для томографической визуализации содержит мультимодальное радиологическое устройство томографической визуализации, калибровочный модуль и модуль реконструкции изображения. Носитель данных, хранящий команды, для выполнения способа томографической визуализации, содержит этапы, на которых инструктируют радиологическое устройство визуализации компьютерной томографии собирать данные КТ-визуализации с использованием детекторной матрицы, определяют постоянную шкалу интенсивности, регулируют шаблон сканирования в воздухе посредством определенной постоянной шкалы интенсивности, калибруют собранные данные КТ-визуализации для формирования калиброванных данных КТ-визуализации и реконструируют калиброванные данные КТ-визуализации для формирования изображения. Использование изобретений позволяет повысить точность данных радиологической томографической визуализации. 3 н. и 9 з.п. ф-лы, 4 ил.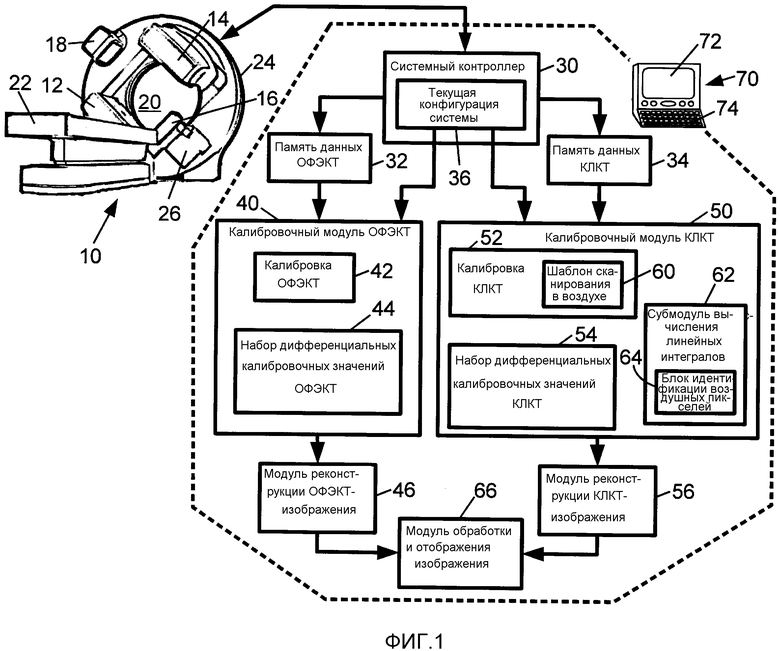
1. Способ томографической визуализации, содержащий этапы, на которых:
собирают данные визуализации с использованием активного средства визуализации радиологического устройства (10) томографической визуализации;
обновляют калибровку (42, 52) на основании текущей информации о радиологическом устройстве томографической визуализации, чтобы создать обновленную калибровку, причем этап обновления включает в себя выбор обновления конфигурационно-зависимой калибровки, соответствующего конфигурации (36) средства визуализации радиологического устройства (10) томографической визуализации, которое является недействующим или запаркованным во время сбора данных, и регулировку калибровочных параметров калибровки (42, 52) в соответствии с обновлением конфигурационно-зависимой калибровки;
калибруют данные визуализации с использованием обновленной калибровки, чтобы сформировать калиброванные данные визуализации; и
реконструируют калиброванные данные визуализации, чтобы сформировать изображение.
2. Способ по п. 1, в котором:
недействующее или запаркованное средство визуализации содержит один или более недействующих или запаркованных детекторов излучения;
этап выбора содержит выбор параметра конфигурационно-зависимой дифференциальной калибровки на основании, по меньшей мере, частично, конфигурации одного или более недействующих или запаркованных детекторов излучения во время сбора данных; и
этап обновления содержит регулировку, по меньшей мере, одного калибровочного параметра калибровки (42, 52) на основании выбранного параметра конфигурационно-зависимой дифференциальной калибровки.
3. Способ по п. 1, в котором этап выбора содержит выбор обновления конфигурационно-зависимой калибровки на основании, по меньшей мере, вспомогательного компонента, установленного на детекторе (12, 14, 16) излучения радиологического устройства (10) томографической визуализации.
4. Способ по любому из пп. 1-3, в котором этап обновления дополнительно содержит этап, на котором:
регулируют калибровочный параметр калибровки посредством регулировочного значения, определенного на основании текущего рабочего условия источника (18) излучения радиологического устройства (10) томографической визуализации.
5. Способ по п. 4, в котором источник (18) излучения является рентгеновской трубкой, и текущее рабочее условие выбирают из группы, состоящей из фокусного пятна рентгеновской трубки, нагрузки рентгеновской трубки и температуры рентгеновской трубки.
6. Способ по любому из пп. 1-3, в котором этап обновления дополнительно содержит этап, на котором:
регулируют калибровочный параметр калибровки посредством регулировочного значения, определенного на основании собранных данных визуализации.
7. Способ по п. 6, в котором этап сбора данных содержит сбор данных визуализации методом конусно-лучевой компьютерной томографии (КЛКТ-визуализации) с использованием средства (16, 18) КЛКТ радиологического устройства (10) томографической визуализации, причем калибровка содержит шаблон (60) сканирования в воздухе, и этап регулировки содержит этап, на котором:
регулируют шаблон сканирования в воздухе посредством шкалы интенсивности для формирования обновленного шаблона сканирования в воздухе.
8. Способ по п. 7, в котором этап обновления дополнительно содержит этап, на котором:
определяют шкалу интенсивности на основании интенсивности, по меньшей мере, одного воздушного пикселя, измеренного во время сбора данных КЛКТ-визуализации.
9. Система для томографической визуализации, содержащая:
мультимодальное радиологическое устройство (10) томографической визуализации, выполненное с возможностью сбора данных визуализации с использованием активного средства визуализации мультимодального радиологического устройства томографической визуализации;
калибровочный модуль (40, 50), выполненный с возможностью:
обновления калибровки (42, 52) активного средства визуализации для калибровки данных визуализации, собранных посредством активного средства визуализации мультимодального радиологического устройства томографической визуализации, на основании, по меньшей мере, частично, конфигурации (36) недействующего или запаркованного средства визуализации радиологического устройства томографической визуализации, которое не действует или запарковано во время сбора данных визуализации, и
калибровки данных визуализации с использованием обновленной калибровки; и
модуль (46, 56) реконструкции изображения, выполненный с возможностью реконструкции калиброванных данных визуализации для формирования изображения.
10. Система по п. 9, в которой:
радиологическое устройство (10) томографической визуализации выполнено с возможностью сбора данных визуализации методом конусно-лучевой компьютерной томографии (КЛКТ-визуализации);
калибровка (52) содержит, по меньшей мере, шаблон (60) сканирования в воздухе; и
калибровочный модуль (50) выполнен с возможностью обновления шаблона сканирования в воздухе посредством применения коэффициента пересчета интенсивности.
11. Носитель данных, хранящий команды, исполняемые цифровым процессором, для выполнения способа томографической визуализации, содержащего этапы, на которых:
инструктируют радиологическое устройство (10) визуализации компьютерной томографии (КТ) собирать данные КТ-визуализации с использованием детекторной матрицы (16);
определяют постоянную шкалу интенсивности, которая является постоянной для всех пикселей детекторов детекторной матрицы (16) на основании интенсивности, по меньшей мере, одного воздушного пикселя, измеренного во время сбора данных КТ-визуализации;
регулируют шаблон (60) сканирования в воздухе посредством упомянутой определенной постоянной шкалы интенсивности, которая является постоянной для всех пикселей детекторов детекторной матрицы (16), для формирования обновленного шаблона сканирования в воздухе;
калибруют собранные данные КТ-визуализации для формирования калиброванных данных КТ-визуализации, при этом калибровка содержит вычисление линейных интегралов поглощения с использованием значений Io, калиброванных с использованием обновленного шаблона сканирования в воздухе; и
реконструируют калиброванные данные КТ-визуализации для формирования изображения.
12. Носитель данных по п. 11, в котором этап калибровки дополнительно содержит этапы на которых:
обновляют калибровку, полученную с недействующим или запаркованным средством визуализации радиологического устройства (10) томографической визуализации в первой конфигурации, для компенсации сбора данных визуализации с недействующим или запаркованным средством визуализации во второй конфигурации, отличающейся от первой конфигурации; и
применяют обновленную калибровку к данным визуализации.
| US5450461 A, 12.09.1995 | |||
| US4875165 A, 17.10.1989 | |||
| Снабженный шипами дополнительный обод для ведущих колес велосипедов и проч. для езды по снегу | 1924 |
|
SU3378A1 |

