Техническое решение относится к измерительной технике, в частности, к способам калибровки и устройствам измерения угла на основе датчика, и может быть использовано в автомобильной технике, станкостроении, авиационной и ракетной технике и других областях, где требуется измерять углы до 90° с помощью мостовых магниточувствительных датчиков на основе магниторезисторов или элементов Холла.
Известен бесконтактный интеллектуальный датчик углового положения, который содержит мостовой магниторезистивный чувствительный элемент, мультиплексор, инструментальный усилитель, аналого-цифровой преобразователь, цифро-аналоговый преобразователь, микроконтроллер, постоянное запоминающее устройство, оперативное запоминающее устройство, последовательный интерфейс, преобразователь напряжения в ток, прецизионный источник опорного напряжения [1]. Датчик обеспечивает измерение угла до 90°. При измерении на мост подают напряжение питания, напряжение с измерительной диагонали моста усиливают, измеряют с помощью АЦП, рассчитывают значение угла с использованием микропроцессора и преобразуют его в выходной ток.
Недостатком аналога является зависимость напряжения с измерительной диагонали моста от напряжения питания, что требует использования прецизионных источников питания моста и опорного напряжения.
Известен бесконтактный интеллектуальный магниторезистивный датчик углового положения, который содержит два магниторезистивных моста, повернутых друг относительно друга на 45°, коммутатор напряжений измерительных диагоналей мостов, выход которого соединен с усилителем. Выход усилителя соединен со входом АЦП, который соединен с источником опорного напряжения и информационным входом устройства вычисления угла, содержащего память программ и данных, а также цифровой и аналоговый интерфейсы [2]. Сопротивление мостов по измерительной диагонали магниторезистивных мостов, повернутых друг относительно друга на 45°, являются соответственно функциями sin и cos угла. Для измерения угла на мосты подают напряжение питания, напряжения с диагоналей мостов измеряют с помощью АЦП и на основе измеренных значений вычисляют угол по алгоритму CORDIC.
Недостатком аналога является отсутствие компенсации напряжений смещения мостов и разбаланса амплитуды напряжений диагоналей мостов, что приводит к погрешности в вычислении угла.
Известен датчик угла и способ его калибровки, в котором датчик угла содержит два магниторезистивных моста, формирующих выходные напряжения пропорциональные синусу и косинусу угла, измерительный блок напряжений мостов, 16-разрядный микропроцессор, в котором калибровку выполняют путем подстройки напряжения смещения мостов так, чтобы отношение выходных сигналов датчика относительно начала оси координат ложилось на окружность [3].
Недостатком аналога является сложный алгоритм определения напряжения смещения мостов, требующий использования микроконтроллера, обрабатывающего 16-разрядные данные с плавающей точкой, необходимость выполнения калибровки по большому количеству точек, отсутствие калибровки разбаланса амплитуды сигналов с мостов.
В качестве прототипа выбран способ калибровки смещения и устройство измерения угла на основе магниторезистивного датчика [4].
Устройство для измерения угла на основе магниторезистивного датчика содержит два магниторезистивных моста, повернутых относительно друг друга на 45°, два усилителя, соединенные с выходами мостов и входами двух АЦП, два ЦАП выдачи компенсационных напряжений смещения мостов, соединенные с усилителями. Имеется вычислительное устройство, соединенное с ЦАП и АЦП, и содержащее программу для расчета угла и калибровочные коды ЦАП компенсационных напряжений смещения мостов, а также цифровой и аналоговый интерфейсы выдачи рассчитанного значения угла. Имеется также источник опорного напряжения АЦП.
Недостатком устройства при измерении углов ±45° является сложная электрическая схема, которая требует наличия двух АЦП и источника опорного напряжения.
Способ калибровки смещения магниторезистивных мостов в прототипе включает в себя раздельную калибровку напряжений компенсации смещения для каждого моста по двум измерениям угла. Измерения проводят после подачи и снятия внешнего магнитного поля под углом 45° (для первого моста) и 90° (для второго моста) при подаче двух напряжений компенсации и определения оптимального значения напряжения компенсации смещения калибруемого моста. Напряжения компенсации смещения мостов подают с помощью двух ЦАП, которые складывают с напряжениями измерительных диагоналей мостов.
Недостатком способа является невозможность калибровки устройства в составе изделия, необходимость измерения двух напряжений с измерительных диагоналей мостов, по которым рассчитывают угол поворота, а также отсутствие компенсации разбаланса амплитуды напряжений диагоналей мостов.
Задачей технического решения является упрощение аппаратурной реализации устройства измерения угла, а также выполнение калибровки устройства с использованием магнитной системы собранного изделия с компенсацией напряжений смещения мостов и разбаланса амплитуды напряжений диагоналей мостов.
Поставленная задача решается благодаря тому, что в устройстве измерения угла на основе мостового магниточувствительного датчика, содержащего два моста, повернутых друг относительно друга на 45°, два усилителя, соединенные с выходами мостов и входами АЦП, два ЦАП, выходы которых соединены со входами компенсации смещения нуля усилителей, вычислительное устройство, соединенное с ЦАП и АЦП, содержащее программу для расчета угла и калибровочные данные, а также цифровой и аналоговый интерфейсы выдачи рассчитанного значения угла, предусмотрены следующие отличия, а именно, выход усилителя напряжения с диагонали второго моста соединен со входом опорного напряжения АЦП, а вычислительное устройство содержит программу для расчета угла и калибровочные данные с учетом разбаланса амплитуды напряжений с диагоналей мостов.
В способе калибровки устройства измерения угла на основе мостового магниточувствительного датчика, в котором с помощью двух ЦАП формируют напряжения компенсации смещения мостов датчика, которые складывают с напряжениями измерительных диагоналей мостов, калибровку напряжения смещения мостов выполняют пошагово раздельно для каждого моста, предусмотрены следующие отличия, а именно, напряжения измеряют в виде отношения напряжений с измерительных диагоналей мостов, калибровку выполняют с использованием магнитной системы собранного изделия, на первом шаге калибровки устанавливают положение магнитной системы, при котором измеренный угол равен нулю, на втором и третьем шагах магнитную систему поворачивают сперва по часовой стрелке, а потом против на заданный угол, фиксируя при этом значения результатов измерения углов, на четвертом шаге устанавливают калибровочный код ЦАП для компенсации напряжений смещения первого моста, при котором измеренный угол будет равен полу сумме значений углов, зафиксированных на предыдущих шагах, на пятом шаге магнитную систему поворачивают на предопределенный угол с фиксацией результата измерения угла, на основании имеющихся значений фактических и измеренных углов на третьем и пятом шагах определяют калибровочный коэффициент разбаланса амплитуды напряжений с диагоналей мостов, на шестом шаге устанавливают калибровочный код ЦАП для компенсации напряжений смещения второго моста, при котором измеренный угол с учетом калибровочного коэффициента разбаланса равен установленному углу магнитной.
Между совокупностью существенных признаков заявленного технического решения и достигаемым техническим результатом существует причинно-следственная связь, а именно, измерение угла проводится на основании одного измерения отношения напряжений с измерительных диагоналей мостов датчика за счет использования рациометрической схемы включения АЦП, калибровка компенсационных напряжений смещения мостов и разбаланса амплитуды напряжений диагоналей мостов выполняется с использованием магнитной системы собранного изделия.
Техническое решение обеспечивает измерение угла в диапазоне от 45° до -45° за одно измерение выходных напряжений с мостового магниточувствительного датчика на основе маниторезистров или элементов Холла, проведение калибровки в составе изделия, а также упрощает схему устройства измерения угла.
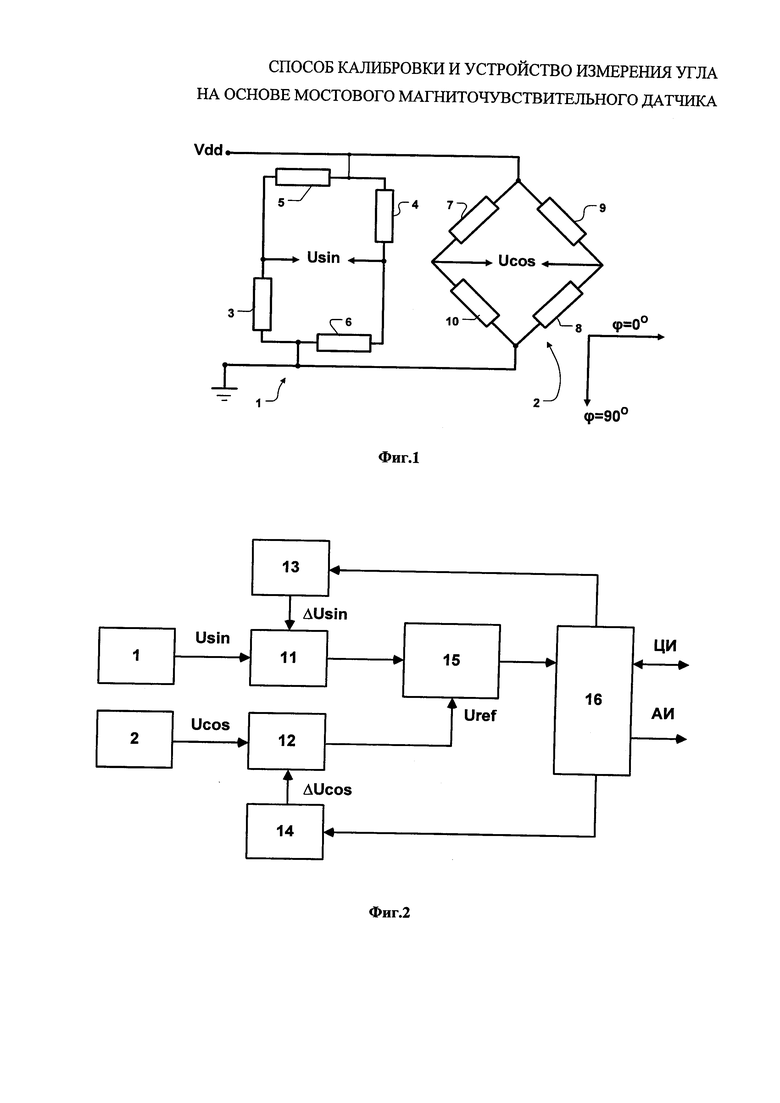
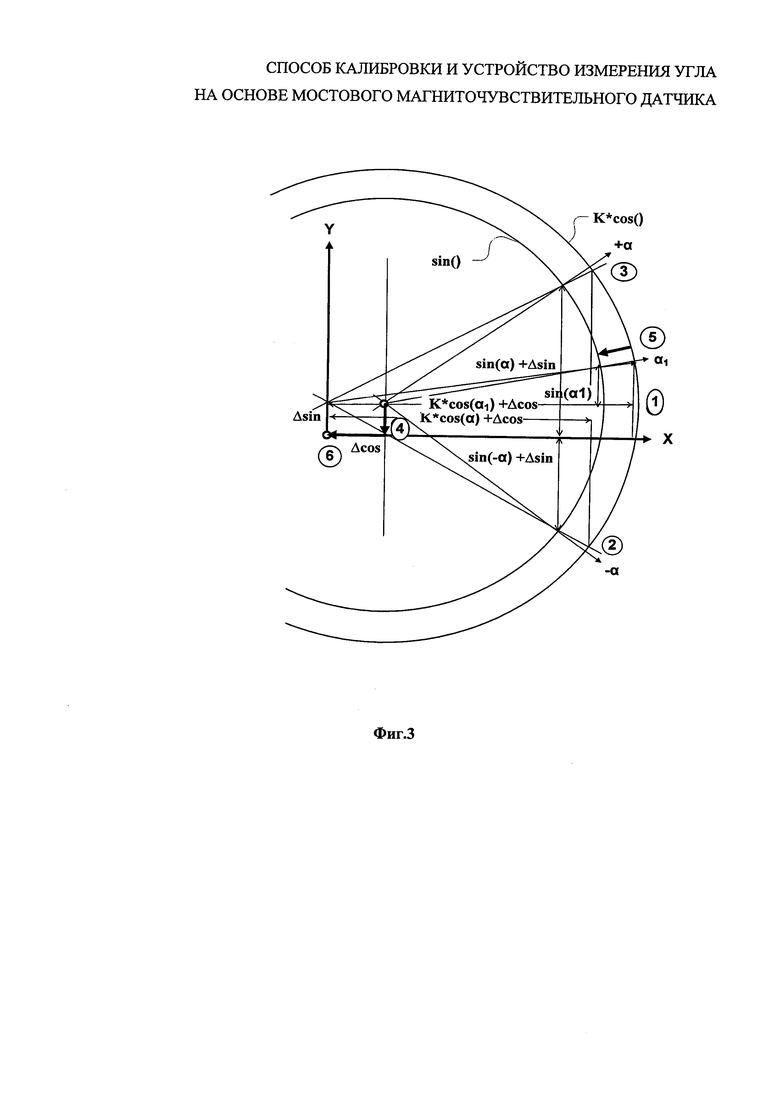
Техническая сущность предложенного технического решения поясняется чертежами, где фиг. 1 содержит схему мостового магниточувствительного датчика, фиг. 2 содержит схему устройства для измерения угла, фиг. 3 иллюстрирует последовательность калибровки.
На фиг. 1 приведена схема мостового магниточувствительного датчика, содержащего два магниторезистивных моста 1 и 2, повернутых относительно друг друга на 45°. Мосты 1 и 2 на ортогональных сторонах содержат пары разнонаправленных магниторезисторов 3, 4 и 5, 6, а также 7, 8 и 9, 10 соответственно.
Увеличение сопротивления одной пары резисторов под влиянием магнитного поля равно уменьшению сопротивления другой пары. Результирующие выходные напряжения Usin и Ucos с измерительных диагоналей мостов смещены по фазе на 90° и пропорциональны sin 2α и cos 2α угла поворота α.
Угол определяется по формуле

В предлагаемом способе измеряется непосредственно тангенс угла в виде соотношение напряжений Usin и Ucos по формуле

Напряжения Usin и Ucos в общем случае описываются формулами


где К - коэффициент разбаланса амплитуды напряжений диагоналей мостов,
Δsin и Δcos - напряжения смещения мостов.
Схема устройства приведена на фиг. 2. Устройство содержит два магниточувствительных моста 1, 2, повернутых друг относительно друга на 45°, два усилителя 11, 12, входы которых соединены с выходами мостов 1 и 2, два ЦАП 13, 14, выходы которых соединены со входами смещения нуля усилителей 11, 12, а входы соединены с вычислительным устройством 16, АЦП 15, измерительный вход которого соединен с выходом первого усилителя 11, а вход опорного напряжения соединен с выходом усилителя 12. Выходные данные с АЦП 15 подаются в вход вычислительного устройства 16, которое содержит память программ и калибровочные данные, а также цифровой (ЦИ) и аналоговый интерфейсы (АИ).
Устройство работает следующим образом. При измерении угла напряжение Ucos подается на вход усилителя 12, на вход смещения нуля усилителя 12 подается напряжение компенсации смещения моста 2 от ЦАП 14, напряжение Usin подается на вход усилителя 11, на вход смещения нуля усилителя 11 подается напряжение компенсации смещения моста 1 от ЦАП 13. ЦАП 13, 14 выдают напряжения компенсации в соответствии с кодом, выдаваемым вычислительным устройством 16 по калибровочным данным. Напряжение с усилителя 11 подается на измерительный вход АЦП 15, напряжение с усилителя 12 подается на вход опорного напряжения АЦП 15. Таким образом АЦП измеряет отношение напряжений или тангенс угла. На основании полученного цифрового кода тангенса от АЦП 15 вычислительное устройство 16 рассчитывает угол по алгоритму CORDIC с компенсацией разбаланса амплитуды напряжений диагоналей мостов. Значение угла вычислительное устройство 16 выдает по цифровому или аналоговому интерфейсу.
Последовательность калибровки иллюстрирует фиг. 3, на которой изображены центры окружностей формирования выходных напряжений синус и косинус соответственно идеального моста и реального, углы магнитной системы, при которых выполняется калибровка с указанием соответствующего шага калибровки. Калибровку выполняют в составе прибора, содержащего измерительную магнитную систему.
Шаг 1. Магнитную систему устанавливают в положение, при котором измеренное значение угла равно нулю.
Шаги 2, 3. От установленного угла на шаге 1 магнитную систему поворачивают на заданный угол α по часовой (шаг 2) и против часовой стрелки (шаг 3), фиксируя при этом соответствующие результаты измерения углов -φ и +φ.
Шаг 4. Устанавливают калибровочный код ЦАП для компенсации напряжения смещения моста синус, при котором измеренный угол будет равен полу сумме значений углов +φ и |-φ|, зафиксированных на шагах 2 и 3.
Шаг 5. От установленного угла на шаге 1 магнитную систему поворачивают на предопределенный угол α1 с фиксацией результата измерения угла φ1.
В результате получаем уравнения:


Решая полученную систему уравнений, получаем формулу коэффициента разбаланса амплитуд напряжений мостов:
Шаг 6. Устанавливают калибровочный код ЦАП для компенсации напряжения смещения моста косинус, при котором измеренный угол φ1 будет равен углу α1 с учетом вычисленного коэффициента разбаланса по формуле 7.
Технико-экономический эффект от предложенного технического решения заключается в измерении угла за одно измерение напряжений на диагоналях мостов с компенсацией напряжений смещения мостов и разбаланса амплитуды напряжений диагоналей мостов, выполнение калибровки устройства с использованием магнитной системы собранного изделия, а также в снижении себестоимости устройства.
Источники информации:
1. Патент РФ 78348
2. Патент РФ 127899
3. Патент США 2003/0042894
4. Патент США 6304074 - прототип
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой измеритель тока | 2016 |
|
RU2666582C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ И КАЛИБРОВКИ НА ОСНОВЕ ТЕНЗОМОСТОВОГО ИНТЕГРАЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ ДАВЛЕНИЯ | 2015 |
|
RU2585486C1 |
| Двухкоординатный магниторезистивный датчик перемещений /его варианты/ | 1980 |
|
SU926518A1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 2002 |
|
RU2216822C1 |
| Компонентный магнитометр | 1979 |
|
SU824099A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ И СПОСОБ ПОДГОТОВКИ ЕГО К РАБОТЕ | 2008 |
|
RU2384824C1 |
| Способ геоэлектроразведки и устройство для его реализации | 1982 |
|
SU1056115A1 |
| УСТРОЙСТВО АВТОНОМНОЙ РЕГИСТРАЦИИ ИМПУЛЬСНОГО МАГНИТНОГО ПОЛЯ | 2013 |
|
RU2533347C1 |
| Термоанемометр постоянного напряжения | 2022 |
|
RU2783700C1 |
| Измеритель индукции постоянного магнитного поля на эффекте Холла (варианты) | 2022 |
|
RU2782984C1 |
Изобретение относится к измерительной технике, в частности к способам калибровки и устройствам измерения угла на основе мостового магниточувствительного датчика, и может быть использовано в автомобильной технике, станкостроении, авиационной и ракетной технике и других областях, где требуется измерять углы до 90° с помощью датчиков на основе магниторезисторов или элементов Холла. Устройство измерения угла на основе мостового магниточувствительного датчика содержит два моста, повернутых друг относительно друга на 45°, два усилителя, два ЦАП, АЦП и вычислительное устройство. Усилители соединены с выходами мостов датчика, входы смещения нуля усилителей соединены с выходами компенсационных ЦАП, входы которых соединены с вычислительным устройством. Вход АЦП соединен с выходом первого усилителя, а вход опорного напряжения АЦП соединен с выходом второго усилителя. Вычислительное устройство содержит память программ и калибровочные данные, а также цифровой и аналоговый интерфейсы. Технический результат заключается в возможности измерения угла в диапазоне от 45° до -45° за один такт преобразования АЦП с использованием одного АЦП. 2 н.п. ф-лы, 3 ил.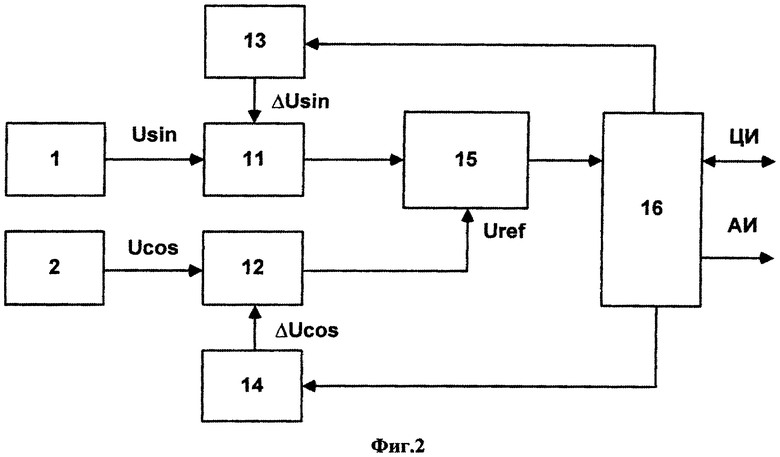
1. Устройство измерения угла на основе мостового магниточувствительного датчика, содержащее два моста, повернутых друг относительно друга на 45°, два усилителя, соединенные с выходами мостов и входами АЦП, два ЦАП, выходы которых соединены со входами компенсации смещения нуля усилителей, вычислительное устройство, соединенное с ЦАП и АЦП, содержащее программу для расчета угла и калибровочные данные, а также цифровой и аналоговый интерфейсы выдачи рассчитанного значения угла, отличающееся тем, что выход усилителя напряжения с диагонали второго моста соединен со входом опорного напряжения АЦП, а вычислительное устройство содержит программу для расчета угла и калибровочные данные с учетом разбаланса амплитуды напряжений с диагоналей мостов.
2. Способ калибровки устройства измерения угла на основе мостового магниточувствительного датчика, заключающийся в том, что на мосты подают напряжение питания, с помощью двух ЦАП на основе кодов, полученных при калибровке, формируют напряжения компенсации смещения мостов, которые складывают с напряжениями измерительных диагоналей мостов, результирующие напряжения измеряют и рассчитывают угол по алгоритму CORDIC, калибровку напряжения смещения мостов выполняют пошагово раздельно для каждого моста, отличающийся тем, что результирующие напряжения измеряют в виде отношения, а угол рассчитывают на основании измеренного отношения напряжений с компенсацией разбаланса амплитуды напряжений диагоналей мостов, калибровку выполняют с использованием магнитной системы собранного изделия, на первом шаге устанавливают положение магнитной системы, при котором измеренный угол равен нулю, на втором и третьем шагах магнитную систему поворачивают сперва по часовой стрелке, а потом против нее на заданный угол, фиксируя при этом результаты измерения углов, на четвертом шаге устанавливают калибровочный код ЦАП для компенсации напряжений смещения первого моста, при котором измеренный угол будет равен полусумме значений углов, зафиксированных на втором и третьем шагах, на пятом шаге магнитную систему поворачивают на предопределенный угол с фиксацией результата измерения угла, на основании полученных на четвертом и пятом шагах значений фактических и измеренных углов определяют калибровочный коэффициент разбаланса амплитуды напряжений диагоналей мостов, на шестом шаге устанавливают калибровочный код ЦАП для компенсации напряжений смещения второго моста, при котором измеренный угол с учетом калибровочного коэффициента разбаланса будет равен углу магнитной системы, установленному на пятом шаге.
| US 6304074 B1, 16.10.2001 | |||
| US 5021736 A, 04.06.1991 | |||
| Способ нанесения шликера на наружные поверхности цилиндрических изделий (труб) и устройство для его осуществления | 1959 |
|
SU127899A1 |
| Устройство, предотвращающее брак от обрыва нити на трикотажно-вязальных машинах | 1949 |
|
SU78348A1 |

