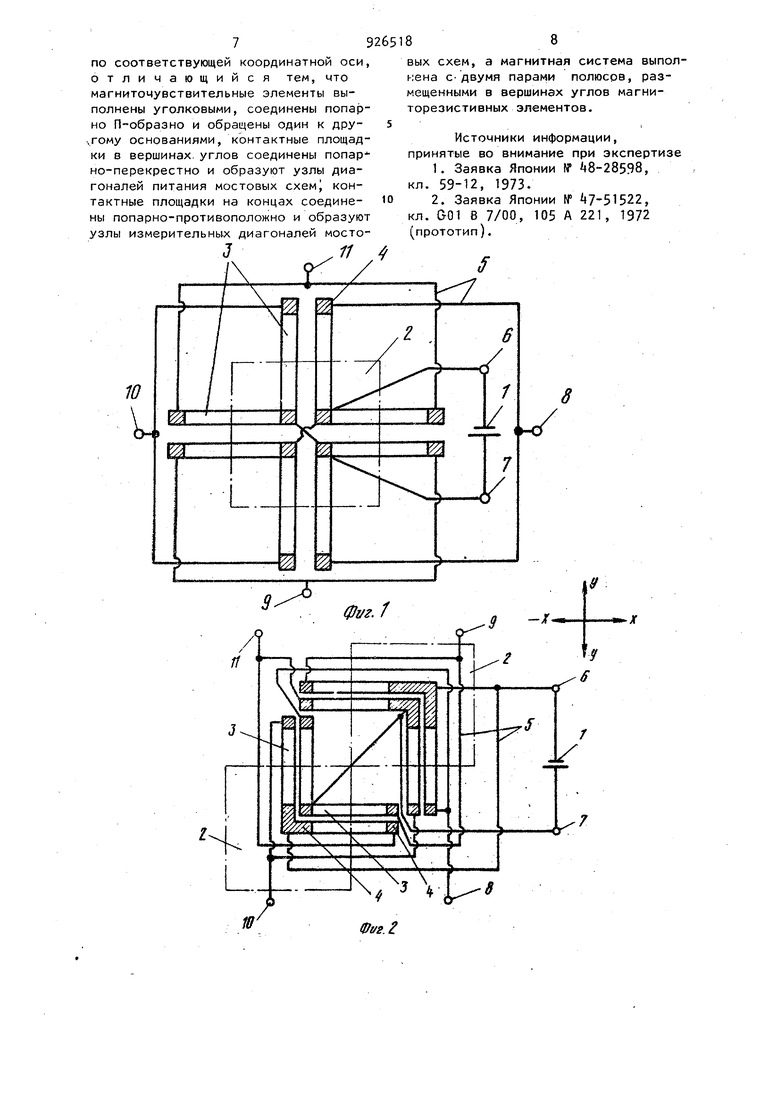
Изобретение относится к измерительной технике и может быть исполь зовано для измерения перемещений по двум координатам. Известен двухкоординатный магниторезистивный датчик перемещений, содержащий магнитную систему с одно парой полюсов, магниточувствительный элемент уголковой формы с контактными пло1;;адками в вершине угла и на концах и источник питания, подключенный с однрй стороны к контактной площадке в вершине угла, а другой стороны через измерительные приборы - к контактным площадкам на концах магниточувствительного элемента. При смещении пары полюсов магнитной системы относительно линейных участков уголкового магниточувствительного элемента изменяются токи в измерительных приборах, .вели чина которых зависит от величины перемещения 1 . Недостатками такого датчика являются отсутствие нулевого сигнала, недостаточная чувствительность и необходимость дополнительного пересчета показаний измерительных приборов для определения величины перемещения . Наиболее близким к предлагаемому является двухкоординатный датчик перемещений, содержащий относительно подвижные магнитную систему и две мостовые измерительные схемы с включенными в их плечи линейными участками четырех магниторезисторов, заключенными между контактными площадками на их концах ч в середине и ориентированными по cooтвeтctвyю-. щей координатной оси 2. Магниторезистивные элементы размещены один относительно другого крестообразно, занимая площадь по-, верхности, равную «tx.liE, где t длина линейного участка магниторезистивного элемента (одйого плеча мостовой измерительной схемы), закл ченного между контактными площадками на конце и в середине каждого магниточувствительного элемента, что обуславливает значительные габариты известного датчика. Цель изобретения - уменьшение га баритов датчика. Поставленная цель достигается тем, что 8 первом варианте исполнения датчика магниторезистивные элементы выполнены уголковыми и расположены вершинами углов к общему цен ру, контактные площадки в вершинах углов соединены попарно-перекрестно и образуют узлы диагоналей питания мостовых схем, контактные площадки на концах соединены попарно-противоположно и образуют узлы измерительных диагоналей мостовых схем, а магнитная система выполнена с одной парой полюсов, размещенной в об щем центре. По второму варианту магниторезис тивные элементы выполнены уголковым и расположены парами по одной из ди гоналей квадрата вершинами наружу, контактные площадки в вершинах угло соединены попарно-противоположно и образуют узлы диагоналей питания мостовых схем, контактные площадки на концах соединены попарно-перекрестно и образуют узлы измерительн . диагоналей мостовых схем, а магнитн система выполнена с двумя парами полюсов, расположенными в вершинах углов магниторезистивных элементов. По третьему варианту магниточувствительные элементы выполнены угол ковыми и расположены по периметру квадрата, контактные площадки в вер шинах углов соединены попарно-перекрестно и образуют узлы диагоналей питания мостовых схем, контактные площадки на концах соединены попарно-последовательно и образуют узлы измерительных диагоналей мостовых схем, а магнитная система выполнена с четырьмя парами полюсов, размещен ными в середине каждой из сторон квадрата. По четвертому варианту магниточувствительные элементы выполнены уголковыми, соединены попарно П-образно и обращены один к другому основаниями, контактные площадки в вершинах углов соединены попарно-перекрестно и образуют узлы диагоналей питания мостовых схем, контактные площадки на концах соединены попарно-противоположно и образуют узлы измерительных диагоналей мостовых схем, а магнитная система выполнена с двумя парами полюсов, размещенными в вершинах углов магниторезистивных элементов. На фиг. 1 - k представлены соответственно конструктивно-электрические схемы Еаыполнения четырех вариантов выполнения двухкоординатного магниторезистивного датчика перемещений . Датчик содержит источник 1 питания, магнитную систему с парами 2 полюсов (каждая пара 2 полюсов показана в плане пунктиром в виде одного квадрата) и магниторезистивные эле-, менты 3 уголковой формы, размещенные в воздушном зазоре между полюсами и имеющие контактные площадки 4 на концах и в середине (в вершине угла) каждого элемента. К контактным площадкам присоединены электрические выводы 5, соединяемые между собой в узлы 6 и 7 диагоналей питания мостовых измерительных схем или в узлы 8-11 измеритвльных диагоналей этих схем. Плечи мостовых измерительных схем для измерения перемещений по координатным осям X и 4 образованы линейными участками уголковых магниторезистивных элементов 3, которые заключены между контактными плошадками Ц на концах и в вершине угла каждого элемента и ориентированы по соответствующей координатной оси. Датчик работает следующим образом. В исходном положении пар 2 полюсов магнитной системы относительно магниторезистивных элементов 3 Mai- нитный поток, создаваемый ими, воздействует на участки одинаковой длины магниторезистивных элементов 3 из-за чего сопротивления всех плеч обеих мостовых измерительных схем для измерения перемещений по осям X и Ч одинаковы и сигналы на измерительных диагоналях 8 - 10 и 9 11 этих схем равны нулю. При взаимном относитель- . ном перемещении пар 2 полюсов ма1- нитной системы датчика и магниторезистивных элементов 3 по одной из координатных осей увеличиваются со-. противления участков магниторезистивных элементов 3 тех двух плеч, на которые надвинулись пары 2 полюсов, и соответственно уменьшаются сопротивления участков магниторезистивных элементов 3 в той же мос товой, схеме, с которых сдвинулись пары 2 полюсов. Это приводит к разбалансировке соответствующей- мостовой измерительной схемы, образованной участками магниторезистивных элементов 3, которые ориентированы по соответствующей Координатной оси Например, при перемещении объекта по оси X сигнал разбаланса появляет ся в узлах 9-11 одной мостовой схемы, а при перемещении по оси У в узлах 8 и 10 второй мостовой схем При перемещении объекта одновременно по обеим координатным осям сигналы разбаланса появляются в узлах обеих мостовых схем, Такое выполнение двухкоординатно магниторезистивного датчика уменьшает его габаритные размеры в план по сравнению с известным датчиком, у которого габариты в плане определяются величиной С )Ч в то время как габариты в плане предлагаемого датчика определяются величиной во втором варианте выполнения и примерно (26) - в остальных вариантах выполнения. Формула изобретения 1. Двухкоординатный магниторезис тивный датчик перемещений, содержащий относительно подвижные магнитную систему и две мостовые измерительные схемы с включенными в их плечи линейными участками четырех магниторезисторов, заключенными меж контактными площадками на их концах и в середине и ориентированными по соответствующей координатной оси, отличающийся тем, что с целью уменьшения габаритов, магни торезистивные элементы выполнены уголковыми и расположены вершинами углов к общему центру, контактные площадки в вершинах углов соединены попарно-перекрестно и образуют узлы диагоналей питания мостовых схем, контактные площадки на концах соеди нены попарно-противоположно и образуют узлы измерительных диагоналей мостовых схем, а магнитная система выполнена с одной парой полюсов, ра мещенной в общем центре. 2.Двухкоординатный магниторезистивный датчик перемещений, содержащий относительно подвижные магнитную систему и две мостовые измерительные схемы с включенными в их плечи линейными участками четырех магниторезисторов, заключенными между контактными площадками на их концах и в середине и ориентированными по соответствующей координатной оси, отличающийся тем, что магниторезистивные элементы выполнены уголковыми и расположены парами по одной из диагоналей квадрата вершинами наружу, контактные площадки в вершинах углов соединены попарно-противоположно и образуют узлы диагоналей питания мостовых схем, контактные площадки на крнцах соединены попарно-перекрестно и образуют узлы измерительных диагоналей мостовых схем, а магнитная система выполнена с двумя парами полюсов, расположенными в вершинах углов магниторезистивных элементов. 3.Двухкоординатный магниторезистивный датчик перемещений, содержащий относительно подвижные магнитную систему и две мостовые измерительные схемы с включенными в их плечи линейными участками четырех магниторезисторов, заключенными между контактными площадками на их концах и в середине и ориентированными по соответствующей координатной оси, отличающийся тем, что магниточувствительные элементы вы- полнены уголковыми и расположены по периметру квадрата, контактные площадки в вершинах углов соединены попарно-перекрестно и образуют узлы диагоналей питания мостовых схем, контактные площадки на концах соединены попарно-последовательно и образуют узлы измерительных диагоналей мостовых схем, а магнитная система выполнена с четырьмя парами полюсов, размещенными в середине каждой из сторон квадрата. . Двухкоординатный магниторезистивный датчик перемещений, содержащий относительно подвижные магнитную систему и две мостовые измерительные схемы с включенными в их плечи линейными участками четырех магниторезисторов, заключенными между контактными площадками на их концах и в сервдмне и ориентированными
по соответствующей координатной оси, отличающийся тем, что магниточувствительные элементы выполнены уголковыми, соединены nonajsно П-образно и обращены один к дру..гому основаниями, контактные площадки в вершинах, углов соединены попарно-перекрестно и образуют узлы диагоналей питания мостовых схем) контактные площадки на концах соединены попарно-противоположно и образуют узлы измерительнь1х диагоналей мосто// ,
вых схем, а магнитная система выполнена Сдвумя парами полюсов, размещенными в вершинах углов магниторезистивных элементов.
Источники информации, принятые во внимание при экспертизе
1.Заявка Японии ff 8-28598, кл. 59-12, 1973.
2.Заявка Японии № 7-51522, кл. G01 В 7/00, 105 А 221, 1972 (прототип). 
| название | год | авторы | номер документа |
|---|---|---|---|
| Магниторезистивный датчик перемещений | 1982 |
|
SU1027657A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ПРЕДМЕТА ИЗ МАГНИТОПРОВОДЯЩЕГО МАТЕРИАЛА | 1995 |
|
RU2083992C1 |
| Магниторезистивный датчик магнитного поля | 2019 |
|
RU2738998C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА АЗИМУТА ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2344370C1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК ТОКА | 2013 |
|
RU2533747C1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 2016 |
|
RU2633010C1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 2014 |
|
RU2561762C1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 2002 |
|
RU2216822C1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК ТОКА | 2015 |
|
RU2601281C1 |
| СПОСОБ КАЛИБРОВКИ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛА НА ОСНОВЕ МОСТОВОГО МАГНИТОЧУВСТВИТЕЛЬНОГО ДАТЧИКА | 2015 |
|
RU2589755C1 |

