Родственные заявки
В настоящей заявке испрашивается преимущество приоритета по международной заявке с серийным номером PCT/US 2011/060866, поданной 15 ноября 2011 г. и озаглавленной «Прогнозирование результатов применения бурового долота», содержание которой полностью включено в настоящий документ посредством ссылки.
Уровень техники
При бурении скважин для нефтегазопоисковой разведки знание строения и свойств геологического пласта, окружающего ствол скважины, позволяет получить информацию, способствующую такой разведке. Каротаж представляет собой процесс выполнения измерений при помощи датчиков, расположенных в стволе скважины, обеспечивающий полезную информацию о характеристиках пласта. Однако большинство скважинных приборов измеряют участки пласта, уже пройденные буровым долотом, вместо измерения характеристик пласта перед долотом до начала проходки.
Краткое описание чертежей
На фиг. 1 показана структурная схема примера устройства, имеющего скважинный прибор для выполнения измерений перед буровым долотом согласно различным вариантам осуществления.
На фиг. 2 показаны особенности примера способа прогнозирования результатов применения долота при выполнении операции бурения согласно различным вариантам осуществления.
На фиг. 3А и фиг. 3В изображено вычисление прогнозного сигнала согласно различным вариантам осуществления.
На фиг. 4А и фиг. 4В изображен эффект взаимной компенсации сигналов от слоя согласно различным вариантам осуществления.
На фиг. 5А и фиг. 5В показаны интегральные геометрические факторы для скважинного прибора согласно различным вариантам осуществления.
На фиг. 6 показаны комбинации углов наклона, при которых достигается эффект взаимной компенсации сигналов от слоя для различных углов падения пласта, где угол простирания при данном угле падения соответствует ориентации диполей согласно различным вариантам осуществления.
На фиг. 7 показаны интегральные геометрические факторы для высокопроводящей среды согласно различным вариантам осуществления.
На фиг. 8 показаны геометрические факторы, связанные с двумя различными базами измерения согласно различным вариантам осуществления.
На фиг. 9А-9С показаны три примера конфигураций с взаимной компенсацией сигналов от слоя и соответствующих зон чувствительности согласно различным вариантам осуществления.
На фиг. 10А и фиг. 10В показаны примеры базовых конфигураций глубинного и малоглубинного измерения согласно различным вариантам осуществления.
На фиг. 11 показано сравнение дифференциального измерения в течение заданного времени с измерением при взаимной компенсации сигналов от слоя согласно различным вариантам осуществления.
На фиг. 12 показан пример системы сбора данных согласно различным вариантам осуществления.
На фиг. 13 показаны особенности примера способа вычисления прогнозного сигнала при помощи глубинной и малоглубинной инверсии согласно различным вариантам осуществления.
На фиг. 14 показаны особенности примера способа вычисления прогнозного сигнала при помощи только сигналов малоглубинного измерения согласно различным вариантам осуществления.
На фиг. 15 изображен пример вычисления прогнозного сигнала при помощи деконволюции согласно различным вариантам осуществления.
На фиг. 16 изображен пример вычисления свойств глубинного слоя при помощи полной инверсии согласно различным вариантам осуществления.
На фиг. 17 изображен пример вычисления свойств глубинного слоя при помощи простой инверсии согласно различным вариантам осуществления.
На фиг. 18 изображен пример вычисления свойств глубинного слоя пласта при помощи инверсии согласно различным вариантам осуществления.
На фиг. 19 изображен пример схемы принятия геонавигационных решений согласно различным вариантам осуществления.
На фиг. 20 показаны геометрические факторы, связанные с двумя различными базами измерения между передатчиком и приемником согласно различным вариантам осуществления.
На фиг. 21 изображен некаузальный деконволюционный фильтр согласно различным вариантам осуществления.
На фиг. 22 изображен каузальный деконволюционный фильтр согласно различным вариантам осуществления.
На каждом из фиг. 23 и фиг. 24 показана синтетическая каротажная диаграмма с нулевым углом падения и четырьмя слоями в процессе инверсии согласно различным вариантам осуществления.
На фиг. 25 показана синтетическая каротажная диаграмма с четырьмя слоями в процессе деконволюции согласно различным вариантам осуществления.
На фиг. 26 и фиг. 27 показано сравнение стандартной конфигурации с конфигурацией с взаимной компенсацией сигналов от слоя для случая с большим количеством слоев с изменяющимся удельным сопротивлением согласно различным вариантам осуществления.
На фиг. 28А-С показан пример модели переходной характеристики при ступенчатом возмущении и примеры моделей дифференциальных сигналов согласно различным вариантам осуществления.
На фиг. 29 показаны сигналы с поправкой за скин-эффект для типового случая согласно различным вариантам осуществления.
На фиг. 30А-В показано инвертированное расстояние до границы и скачок удельной проводимости для типового случая согласно различным вариантам осуществления.
На фиг. 31 изображена структурная схема компонентов типовой системы управления активацией групп антенн и обработки принятых сигналов для прогнозирования результатов применения долота согласно различным вариантам осуществления.
На фиг. 32 изображен вариант осуществления системы на буровой площадке согласно различным вариантам осуществления.
На фиг. 33 изображено устройство, выполненное с возможностью выполнения совместных измерений удельного сопротивления в районе долота и глубинных измерений удельного сопротивления согласно различным вариантам осуществления настоящего изобретения.
На фиг. 34 изображена структурная схема системы получения результатов измерений удельного сопротивления у долота и глубинных измерений удельного сопротивления согласно различным вариантам осуществления настоящего изобретения.
На фиг. 35A-35D изображены различные варианты осуществления датчика удельного сопротивления у долота (УСУД (ABR)) и дополнительного измерительного датчика согласно различным вариантам осуществления настоящего изобретения.
На фиг. 36 показана блок-схема первого способа обработки сигнала от пласта согласно различным вариантам осуществления настоящего изобретения.
На фиг. 37 показана блок-схема второго способа обработки сигнала от пласта согласно различным вариантам осуществления настоящего изобретения.
На фиг. 38 показан синтетический график показаний прибора, измеряющего удельное сопротивление пласта, согласно различным вариантам осуществления настоящего изобретения.
На фиг. 39А и 39В показаны графики результатов инверсии при использовании традиционных измерений удельного сопротивления и результаты измерений согласно различным вариантам осуществления настоящего изобретения соответственно.
На фиг. 40 показана структурная схема устройства и системы согласно различным вариантам осуществления настоящего изобретения.
На фиг. 41 показана блок-схема, иллюстрирующая несколько способов согласно различным вариантам осуществления настоящего изобретения.
Подробное раскрытие изобретения
Нижеследующее подробное раскрытие изобретения приведено со ссылкой на прилагаемые чертежи, представляющие, в качестве иллюстрации, но не ограничения, различные варианты осуществления, посредством которых может быть реализовано настоящее изобретение. Эти варианты осуществления раскрыты достаточно подробно, что позволяет специалистам реализовать на практике как эти, так и другие варианты осуществления. Возможно применение и других вариантов осуществления, при этом в них могут быть внесены структурные, логические и электрические изменения. Различные варианты осуществления необязательно являются взаимоисключающими, так как некоторые из них могут объединяться с одним или несколькими другим вариантами, образуя новые варианты осуществления. Поэтому нижеследующее подробное описание не следует воспринимать в ограничивающем смысле.
На фиг. 1 показана структурная схема варианта осуществления устройства 100, имеющего скважинный прибор 105 для выполнения измерений в зоне перед буровым долотом, которые могут использоваться для определения прогнозного сигнала и для определения свойств в стволе скважины 102. Скважинный прибор 105 может содержать группу передатчиков и приемников 110-1, 110-2 … 110-(N-1), 110-N, упорядоченных относительно продольной оси 107 скважинного прибора 105. Эти передатчики и приемники могут применяться для улавливания сигналов вблизи скважинного прибора 105 в зонах позади прибора 105 и в зонах, прилегающих к боковым сторонам прибора 105. Такие сигналы относительно близкого радиуса действия могут называться малоглубинными сигналами. Эти передатчики и приемники могут также применяться для улавливания сигналов перед скважинным прибором 105 и, если прибор 105 расположен на опоре бурового долота, то сигналы, улавливаемые перед прибором 105, могут охватывать зоны, расположенные перед буровым долотом. Такие сигналы относительно дальнего радиуса действия, более глубокие, чем малоглубинные сигналы, могут называться глубинными сигналами. Управление группой передатчиков и приемников 110-1, 110-2 … 110-(N-1), 110-N может осуществляться посредством выбора пар передатчик-приемник, определяемого базой измерения между передатчиком и приемником в каждой соответствующей паре. Большие базы измерения могут использоваться для зондирования зоны перед буровым долотом и получения глубинных сигналов. Меньшие базы измерения могут использоваться для зондирования зон пласта вокруг скважинного прибора 105. Глубинный и малоглубинный сигнал могут быть коррелированными с базой измерения передатчик-приемник, которая, в свою очередь, может быть задана местоположением передатчиков и приемников позади бурового долота. Например, малоглубинное измерение (или измерение в ближней части пласта) может содержать составляющие из зон, находящихся на расстоянии от приблизительно одного дюйма до приблизительно 10 футов от скважинного прибора, а глубинное измерение (или измерение в дальней части пласта) - сигналы из зон, находящихся на расстоянии от приблизительно 5 футов до приблизительно 200 футов от скважинного прибора. При выполнении малоглубинных и глубинных измерений последние включают в себя составляющие из зон, расположенных дальше от скважинного прибора, чем при малоглубинных измерениях. Например, глубинные измерения могут обеспечить получение сигналов на расстояниях от скважинного прибора, которые по меньшей мере на 25% превышают, не ограничиваясь этим, расстояния, обеспечивающие получение сигналов при малоглубинных измерениях. Разность расстояний, обеспечивающих получение сигналов, может составлять меньше или больше 25%.
Группа передающих антенн и приемных антенн может быть упорядочена относительно продольной оси 107 скважинного прибора 105, которая, по существу, перпендикулярна поперечному сечению скважинного прибора, соответствующему поперечному сечению муфты в бурильной колонне. Эта группа может содержать передатчики и приемники, расположенные на расстоянии друг от друга так, чтобы один из передатчиков или приемников был ближайшим к буровому долоту, а последний из передатчиков или приемников в группе был наиболее удаленным от бурового долота. Передатчик или приемник, ближайший к буровому долоту, может располагаться как можно ближе к нему. Чем ближе к буровому долоту начинается группа, тем дальше от бурового долота могут быть определены свойства пласта. Первая антенна может быть размещена на муфте позади бурового двигателя. Альтернативно, первая антенна может быть размещена на буровом двигателе, а не на муфте позади двигателя.
Пары передатчик-приемник могут быть расположены, например, путем ориентации на скважинном приборе 105 относительно продольной оси 107 прибора 105 с использованием специального сочетания угла наклона передатчика и угла наклона приемника таким образом, чтобы сигналы от слоев между соответствующим передатчиком и приемником пары могли взаимно компенсироваться. Угол наклона передатчика может быть таким же, как угол наклона приемника, или отличным от него. Например, приемник может иметь нулевой, а передатчик - ненулевой угол наклона. Такое расположение передатчика и приемника на скважинном приборе 105 может сделать прибор 105 нечувствительным к свойствам зоны сбоку от него. Обработка сигналов, получаемых приемником пары в ответ на зондирующий сигнал, посылаемый передатчиком пары, может быть реализована таким образом, чтобы устранить эффекты, возникающие вокруг прибора, и сфокусироваться перед долотом. Упорядоченное расположение передатчиков и соответствующих приемников при конкретной ориентации с взаимной компенсацией сигналов от слоев может быть осуществлено для данного угла падения пласта. Для передатчиков и соответствующих приемников, упорядоченных при конкретной ориентации с взаимной компенсацией сигналов от слоев для угла падения, равного нулю градусов, например, ориентация при другом угле падения может привести к неполной взаимной компенсации сигналов от слоев. Однако может существовать диапазон углов падения, отличных от угла падения, при котором передатчик и приемник предназначены для практически полной взаимной компенсации сигналов от слоев, при которой сигнал от слоев в существенно компенсируется. Существенная взаимная компенсация может составлять 90% оптимальной взаимной компенсации. Количество передатчиков и приемников 110-1, 110-2 … 110-(N-1), 110-N скважинного прибора 105 может быть достаточным, чтобы обеспечить возможность различной ориентации пар передатчик-приемник таким образом, чтобы оптимальная компенсация могла достигаться прибором 105 для некоторого количества различных углов падения пласта.
Прогнозные измерения для получения прогнозного сигнала или определения свойств пласта в зоне перед буровым долотом могут выполняться скважинным прибором 105 без использования пар передатчик-приемник, ориентированных таким образом, чтобы работа пар передатчик-приемник не обеспечивала взаимную компенсацию сигналов от слоев. Данные одного или нескольких малоглубинных измерений могут вычитаться из данных глубинного измерения для получения прогнозного измерения. Данные прогнозного измерения могут подвергаться обработке для получения прогнозного сигнала и определения свойств пласта в зоне перед буровым долотом.
Скважинный прибор 105 может иметь группу антенн, расположенных парами. В первой паре антенн передатчика-приемника база измерений между передатчиком и приемником может находиться в диапазоне от двух до двадцати футов для выполнения малоглубинного измерения таким образом, чтобы сигналы от слоев в значительной степени, по существу, компенсировались между передатчиком и приемником первой пары антенн передатчика-приемника. Во второй паре антенн передатчика-приемника база измерений между передатчиком и приемником может находиться в диапазоне от двадцати до ста футов для выполнения глубинного измерения таким образом, чтобы сигналы от слоев практически взаимно компенсировались между передатчиком и приемником второй пары антенн передатчика-приемника. Передающая антенна первой пары антенн передатчика-приемника выполнена в качестве передающей антенны передатчика второй пары антенн передатчика-приемника, или приемная антенна первой пары антенн передатчика-приемника выполнена в качестве приемной антенны второй пары антенн передатчика-приемника.
Устройство 100 может содержать управляющий блок 120 для управления активацией передатчиков скважинного прибора 105 и приемом сигналов приемниками скважинного прибора 105. Управляющий блок 105 может быть выполнен с возможностью выбора антенн из нескольких антенн в одной или более парах передатчик-приемник, предназначенных для выполнения одного или нескольких глубинных измерений и одного или нескольких малоглубинных измерений, когда устройство работает в стволе скважины. Управляющий блок 120 может быть выполнен с возможностью выбора антенн из нескольких антенн в одной или более парах передатчик-приемник, выполненных с возможностью обеспечить взаимную компенсацию сигналов от слоев между передающей и приемной антенной соответствующей пары передатчик-приемник, когда прибор работает в стволе скважины. Управляющий блок 120 может быть выполнен с возможностью проведения, помимо других операций с использованием передающей антенны и соответствующей приемной антенны, глубинного измерения абсолютным методом, глубинного измерения отношений с дополнительным приемником или глубинного измерения компенсационным методом с дополнительным приемником и дополнительным передатчиком так, чтобы сигналы от слоев, по существу, взаимно компенсировались между антенными парами передатчика-приемника при соответствующих измерениях. Управляющий блок 120 может управлять работой скважинного прибора 105, имеющего четыре антенны, предназначенные для выполнения малоглубинных и глубинных измерений и, по существу, полной взаимной компенсации сигналов от слоев за счет работы четырех антенн. Управляющий блок 120 может управлять работой прибора 105, имеющего меньше четырех антенн, предназначенных для выполнения малоглубинных и глубинных измерений и, по существу, полной взаимной компенсации сигналов от слоев за счет работы четырех антенн. Управляющий блок 120 может работать совместно с блоком 126 обработки данных, обрабатывая сигналы, полученные от приемников в скважинном приборе 105.
Блок 126 обработки данных может быть выполнен с возможностью обработки данных одного или нескольких глубинных измерений и одного или нескольких малоглубинных измерений с целью генерирования прогнозного сигнала, по существу, не содержащего составляющих из зон, расположенных по сторонам прибора. Блок 126 обработки данных может содержать технические средства для осуществления одного или нескольких методов обработки сигналов малоглубинных и глубинных измерений для генерации прогнозного сигнала. Прогнозный сигнал определяют как сигнал, коррелирующий с зоной перед буровым долотом, связанный с операцией бурения. Блок 126 обработки данных может также использовать генерируемый прогнозный сигнал для определения свойств пласта в зоне перед буровым долотом. Прогнозный сигнал и/или выявленные свойства пласта в зоне перед буровым долотом могут использоваться для принятия геонавигационных решений. Геонавигация представляет собой целенаправленный контроль с целью регулирования направления бурения.
Методы определения прогнозного сигнала и/или свойств пласта в зоне перед буровым долотом могут включать в себя различные варианты применения операций инверсии, прямого моделирования, использования синтетических каротажных диаграмм и способов фильтрации. Операции инверсии могут включать в себя сравнение результатов измерения с результатами прогнозирования на основе модели так, чтобы можно было определить значение или пространственное изменение физического свойства. Традиционная операция инверсии может включать в себя определение изменения электропроводности в пласте по результатам измерений индуцированных электрических и магнитных полей. Другие методы, такие как прямое моделирование, нацелены на вычисление ожидаемых наблюдаемых значений с учетом принятой модели. Синтетическая каротажная диаграмма представляет собой моделируемую каротажную диаграмму, основанную на моделируемой переходной характеристике скважинного прибора при известных параметрах пласта. Синтетическая каротажная диаграмма создается при помощи числового моделирования взаимодействия прибора и пласта, обычно, включая моделирование каждой глубины каротажной диаграммы, точка за точкой.
Блок 126 обработки данных может быть выполнен с возможностью выравнивания данных одного или нескольких малоглубинных измерений с учетом геометрических факторов относительно данных одного или нескольких глубинных измерений таким образом, чтобы разность между данными одного или нескольких глубинных измерений и выровненными данными одного или нескольких малоглубинных измерений обеспечивала прогнозный сигнал. Это выравнивание может быть реализовано при помощи деконволюционного фильтра. Блок 126 обработки данных может быть выполнен с возможностью осуществления инверсии на основе сигналов от одного или нескольких малоглубинных измерений и сигналов от одного или нескольких глубинных измерений и с возможностью вычитания ожидаемого глубинного сигнала, полученного с помощью инверсии, из измеренного сигнала глубинного измерения с целью генерации прогнозного сигнала. Блок 126 обработки данных может быть выполнен с возможностью осуществления инверсии на основе сигналов от одного или нескольких малоглубинных измерений без входных данных от одного или нескольких глубинных измерений и с возможностью вычитания сигнала, полученного при помощи инверсии, применяемой к прямому моделированию глубинной конфигурации, с целью генерации прогнозного сигнала. Блок 126 обработки данных может использовать данные, полученные от антенных пар приемника-передатчика, выбранных таким образом, чтобы сигнал от слоя между передающей и приемной антенной соответствующей пары передатчик-приемник практически компенсировался в ответ на работу передающей антенны. Блок 126 обработки данных может использовать данные, полученные от пар антенн приемника-передатчика, которые не работают с взаимной компенсацией сигналов от слоев.
Передатчики и приемники 110-1, 110-2 … 110-(N-1), 110-N скважинного прибора 105 могут быть выполнены с несколькими совмещенными антеннами, имеющими различные углы наклона. Электронные схемы и обрабатывающие устройства, исполняющие команды в управляющем блоке 120, и блок 126 обработки данных могут использоваться для синтетического создания углов наклона путем объединения сигналов от нескольких совмещенных антенн с различными углами наклона. Эта схема позволяет устройству 100 алгоритмически оптимизировать взаимную компенсацию сигналов для различных углов падения пласта. Электронные схемы и обрабатывающие устройства, исполняющие команды в управляющем блоке 120, и блок 126 обработки данных могут использоваться для синтетического создания углов наклона путем объединения сигналов от нескольких совмещенных антенн, чтобы синтетически создавать угол наклона, при котором сигналы от слоев между несколькими совмещенными антеннами взаимно компенсируются. Оптимизированная взаимная компенсация сигналов может применяться для получения прогнозного сигнала и оценочных свойств пласта в зоне перед буровым долотом.
Передатчики и приемники 110-1, 110-2 … 110-(N-1), 110-N прибора 105 могут быть выполнены с набором передатчиков и приемников, имеющих выбранные углы наклона, такие, чтобы сигналы от слоев за пределами зоны, расположенной между соответствующими передатчиками и приемниками этого набора, могли быть взаимно компенсированы. Это обеспечивает компенсацию, противоположную взаимной компенсации сигналов от слоев между передатчиком и соответствующим приемником, обсуждавшуюся выше. Это позволяет получить малоглубинное показание (или показание с малым радиусом исследования), которое сфокусировано в зоне вокруг прибора и может использоваться вместо результатов других малоглубинных измерений, упомянутых в настоящем документе. Антенна передатчика и антенна приемника могут быть расположены вдоль продольной оси скважинного прибора 105 так, чтобы по меньшей мере одна антенна передатчика или антенна приемника имела угол наклона относительно продольной оси прибора, при котором ориентация антенны передатчика и антенны приемника относительно продольной оси и относительно друг друга обеспечивает эффективную взаимную компенсацию сигналов от слоев за пределами зоны, расположенной между соответствующим передатчиком и приемником. Электронные схемы и обрабатывающие устройства, исполняющие команды в управляющем блоке 120 и блоке 126 обработки данных, могут использоваться для синтетического создания углов наклона путем объединения сигналов от нескольких совмещенных антенн для взаимной компенсации сигналов от слоев за пределами зоны, расположенной между несколькими совмещенными антеннами. В применениях, где сигналы, связанные с углами наклона передатчика и приемника, синтетически генерируются от совмещенных антенн с различными углами наклона, одна и та же пара передатчик-приемник может использоваться для фокусирования впереди и фокусирования вокруг скважинного прибора 105.
Управляющий блок 120 и/или блок 126 обработки данных могут располагаться на поверхности скважины 102 с возможностью поддержания оперативной связи со скважинным прибором 105 при помощи какого-либо механизма связи. Такой механизм связи может быть реализован в виде средства связи, что является стандартом для скважинных операций. Управляющий блок 120 и/или блок 126 обработки данных могут быть размещены вдоль механизма, при помощи которого прибор 105 помещают в ствол скважины 102. Управляющий блок 120 и/или блок 126 обработки данных могут быть объединены со скважинным прибором 105 так, чтобы управляющий блок 120 и/или блок 126 обработки данных работали в стволе скважины 102. Управляющий блок 120 и/или блок 126 обработки данных могут быть размещены вдоль прибора 105. Такие варианты осуществления могут обеспечить стабильную и глубокую оценку пластов, еще не вскрытых буровым долотом в ходе операции бурения, предотвращение опасных ситуаций, таких как выбросы, и повышенное извлечение углеводородов, за счет использования механизма геонавигации.
Устройство 100 может быть предназначено для реализации в стволе скважины в виде системы измерений в процессе бурения ИПБ (MWD), такой как система каротажа во время бурения КВБ (LWD). Скважинный прибор 105 может быть расположен на буровом долоте, выполняющем операцию бурения. Альтернативно, устройство 100 может быть выполнено в виде системы, спускаемой на канате.
На фиг. 2 показаны особенности примера осуществления способа прогнозирования результатов применения долота при операции бурения. В блоке 210 осуществляется управление активацией прибора, расположенного в стволе скважины, где этот прибор оснащен группой пространственно разнесенных антенн передатчиков и антенн приемников, функционирующих в составе выбранных пар передатчик-приемник. Управление активацией скважинного прибора может включать в себя выбор функционирования пар антенн передатчик-приемник таким образом, чтобы сигналы от слоев между антенной передатчика и антенной приемника соответствующей пары передатчик-приемник практически взаимно компенсировались в ответ на передачу зондирующего сигнала антенной передатчика. Могут использоваться пары антенн передатчик-приемник, в которых сигналы от слоев между антенной передатчика и антенной приемника соответствующей пары передатчик-приемник не компенсируются в ответ на зондирующий сигнал передатчика.
В блоке 220 получают глубинный сигнал в результате глубинного измерения с использованием пары передатчик-приемник и один или несколько малоглубинных сигналов в результате одного или нескольких малоглубинных измерений с использованием одной или нескольких других пар передатчик-приемник. В ситуациях, когда отсутствует взаимная компенсация сигналов от слоев, полученных благодаря работе передатчика, можно выполнить несколько малоглубинных измерений.
В блоке 230 обрабатывают один или несколько малоглубинных сигналов, генерируя моделируемый сигнал, относящийся к зонам, примыкающим к боковым сторонам и задней стороне скважинного прибора. В блоке 240 формируют прогнозный сигнал, по существу, без составляющих от зон, примыкающих к прибору, путем обработки глубинного сигнала с учетом моделируемого сигнала.
Обработка одного или нескольких малоглубинных сигналов и формирование прогнозного сигнала могут включать в себя выравнивание одного или нескольких малоглубинных сигналов с учетом геометрических факторов относительно глубинного сигнала таким образом, чтобы разность между глубинным сигналом и выровненными одним или несколькими малоглубинными сигналами обеспечивала прогнозный сигнал. Выравнивание одного или нескольких малоглубинных сигналов может содержать генерацию трансформационного фильтра для преобразования малоглубинных сигналов в глубинные при помощи деконволюции малоглубинных и глубинных геометрических факторов. Обработка одного или нескольких малоглубинных сигналов может содержать выполнение инверсии на основе одного или нескольких малоглубинных сигналов и глубинного сигнала таким образом, чтобы моделируемый сигнал был получен в качестве ожидаемого глубинного сигнала на основе этой инверсии. На следующем шаге формирование прогнозного сигнала может содержать вычитание моделируемого сигнала из глубинного сигнала в целях генерирования прогнозного сигнала. Обработка одного или нескольких малоглубинных сигналов может содержать выполнение инверсии на основе одного или нескольких малоглубинных сигналов без использования глубинного сигнала в качестве входных данных и применение сигнала, полученного на основе инверсии, для прямого моделирования глубинной конфигурации в целях формирования моделируемого сигнала. На следующем шаге формирование прогнозного сигнала может содержать вычитание моделируемого сигнала из глубинного сигнала в целях генерирования прогнозного сигнала.
В различных вариантах осуществления инверсия может выполняться с использованием прогнозного сигнала и параметров слоев вокруг скважинного прибора в целях генерирования удельных сопротивлений и расположения глубинных слоев вокруг бурового долота, соответствующих прибору. Прогнозный сигнал может подвергаться анализу в стволе скважины во время операции бурения, при этом геонавигационное решение может быть принято в стволе скважины на основании этого анализа. Альтернативно, геонавигационное решение может быть принято на поверхности при помощи проверки анализа или проведения анализа на поверхности. Операции на поверхности могут выполняться при помощи пользовательского интерфейса с дисплеем, предоставляющего оператору, полностью или частично, результаты анализа. Значения удельного сопротивления и данные о положении глубинных слоев могут генерироваться по мере продвижения бурового долота вперед. Операция бурения может быть прекращена, если будет определено, что изменения удельного сопротивления при продвижении бурового долота вперед превысили некоторый порог изменения удельного сопротивления. Превышение порога может указывать на опасные изменения давления впереди бурового долота.
Как правило, все серийно выпускаемые электромагнитные скважинные приборы наиболее чувствительны к свойствам пласта, относящимся к интервалу между положениями передатчика и приемника. Однако в некоторых применениях может оказаться желательным обеспечить более высокую чувствительность выше или ниже этого интервала. Например, такая чувствительность может быть полезна для геонавигации. При геонавигации измерения могут выполняться вблизи от бурового долота в ходе бурения, чтобы эффективно направлять траекторию ствола скважины к продуктивным зонам или остановить бурение, прежде чем будут вскрыты опасные зоны. Хотя было сделано несколько попыток проектирования скважинных приборов, чувствительных к свойствам пласта впереди долота, почти во всех случаях эти приборы остаются более чувствительными к свойствам пласта сбоку от прибора. В результате измерения усложняются за счет изменения профиля пласта вокруг прибора.
В некоторых вариантах осуществления может быть реализован процесс, направленный на устранение эффектов, имеющих место вокруг скважинного прибора, и фокусирование впереди долота. Этот процесс может быть осуществлен путем использования специального сочетания угла наклона передатчика и угла наклона приемника, позволяющего взаимно компенсировать сигналы от слоев между передатчиком и приемником и сделать прибор нечувствительным к свойствам зоны, расположенной сбоку от него. См., например, фиг. 4А и фиг. 4В. Полученные чувствительные зоны показаны в левом окне на фиг. 3А, где фиг. 3А изображает прогнозное измерение на основе углов наклона, при которых сигналы от слоев взаимно компенсируются. В качестве второй процедуры отдельное малоглубинное измерение можно выровнять с учетом геометрического фактора относительно предыдущего измерения при помощи деконволюционного фильтра, а затем вычесть из предыдущего измерения. См., например, среднее и правое окна на фиг. 3А. Однако следует отметить, что процесс, показанный на фиг. 3А, может обеспечивать значительную величину для оценки операции бурения, если не вычитать результаты малоглубинных измерений. Альтернативно, процесс может использовать вычитание при произвольных углах наклона без взаимной компенсации сигналов от слоев, как показано на фиг. 3В, иллюстрирующей прогнозное измерение на основании произвольных углов наклона.
Выше было раскрыто, что для специального сочетания углов наклона передатчика и приемника скважинного прибора можно исключить (компенсировать) прямой сигнал, идущий от передатчика к приемнику прибора. При другом подходе в одном из примеров осуществления сигналы, обусловленные слоями пласта между передатчиком и приемником, взаимно компенсируются. Следует отметить, что, хотя это специальное сочетание углов наклона не обеспечивает уменьшение чувствительности, если говорить об отдельных точках в трехмерном пространстве, оно обеспечивает подавление чувствительности на плоских границах при данном падении и простирании благодаря эффектам взаимной компенсации сигналов от слоев на поверхностях, как показано на фиг. 4А и фиг. 4В. На фиг. 4А изображен пример эффектов взаимной компенсации сигналов от слоев с границей, расположенной между передатчиком и приемником. На фиг. 4В изображен пример эффектов взаимной компенсации сигналов от слоев с границей, расположенной за пределами интервала передатчик-приемник. В результате вариант осуществления процесса может быть ограничен плоскими поверхностями с известными углами падения и простирания. В ходе исследований было установлено, что даже если поверхности не являются идеально плоскими, или падении и простирание в точности неизвестны, раскрытые в данной заявке процессы могут все же обеспечивать хорошую взаимную компенсацию.
На фиг. 5А и 5В показаны интегральные геометрические факторы для скважинного прибора. Эти факторы относятся к прибору с одним передатчиком и одним приемником, работающему на частоте f=500 Гц с базой измерений d1=24 футов в зоне с высоким удельным сопротивлением. На фиг. 5А показаны интегрированные (в радиальном направлении) геометрические факторы, полученные путем создания синтетической каротажной диаграммы очень тонкого слоя с низким контрастом свойств при нулевом угле падения. Кривая 561 относится к углу наклона передатчика, равному 0°, и углу наклона приемника, равному 45°. Кривая 562 относится к углу наклона передатчика, равному 45°, и углу наклона приемника, равному 45°. Кривая 563 относится к углу наклона передатчика, равному 50°, и углу наклона приемника, равному 50°. Кривая 564 относится к углу наклона передатчика, равному 55°, и углу наклона приемника, равному 55°. Как видно из фиг. 5А, при угле передатчика и приемника, равном 55°, геометрический фактор уменьшается при всех положениях между передатчиком и приемником. Следует отметить, что, хотя наклон передатчика и приемника в этих случаях выбран равным, взаимная компенсация сигналов от слоя может достигаться и при разных углах наклона передатчика и приемника. На фиг. 5В показан аналогичный график, но для угла падения границы пласта, равного 30°. Кривая 571 относится к углу наклона передатчика, равному 0°, и углу наклона приемника, равному 45°. Кривая 572 относится к углу наклона передатчика, равному 45°, и углу наклона приемника, равному 45°. Кривая 573 относится к углу наклона передатчика, равному 50°, и углу наклона приемника, равному 50°. Кривая 574 относится к углу наклона передатчика, равному 55°, и углу наклона приемника, равному 55°. В этом случае взаимная компенсация сигналов от слоя все еще может быть достигнута, но при другом угле, составляющем приблизительно 45°, как показано на кривой 572. Даже при неоптимальном угле наклона 55° достигается относительно хорошая взаимная компенсация. В результате, как ожидается, прибор будет эффективен при угле наклона 45 или 55° в диапазоне углов падения пласта 0-30° при используемой частоте и базе измерений. Эту методологию можно использовать для проектирования скважинных приборов, оптимальных для различных диапазонов углов падения пласта. Важно также отметить, что аналогичный процесс оптимизации можно использовать для достижения противоположной компенсации: сигнал снаружи зоны между передатчиком и приемниками может быть взаимно компенсирован путем соответствующего регулирования углов наклона передатчика и приемника. Это позволяет получить малоглубинное показание, которое сфокусировано в зоне вокруг скважинного прибора и может использоваться вместо результатов другого малоглубинного измерения, упомянутого в настоящем документе. Один из способов получения такой конфигурации состоит в том, чтобы начать с конфигурации, соответствующей кривой 561, и уменьшать углы наклона передатчика и приемника до тех пор, пока чувствительность между передатчиком и приемником не станет существенно больше по сравнению с сигналом за пределами этой зоны. В случае когда сигналы, связанные с углами наклона передатчика и приемника, синтетически генерируются от совмещенных антенн с различными углами наклона, одна и та же пара передатчик-приемник может использоваться для фокусирования впереди и фокусирования вокруг прибора.
На фиг. 6 показаны комбинации углов наклона, при которых достигается эффект взаимной компенсации сигналов от слоя для различных углов падения пласта, где угол простирания при данном угле падения соответствует ориентации диполей. База измерений между антенной передатчика и антенной приемника составляет 24 фута при работе на частоте 500 Гц в зоне высокого удельного сопротивления. Кривая 681 относится к углу падения 30°. Кривая 682 относится к углу падения 15°. Кривая 683 относится к углу падения 30°. Кривая 684 относится к углу падения 45°. Кривая 686 относится к углу падения 60°. Кривая 687 относится к углу падения 75°. Из фиг. 6 видно, что способ взаимной компенсации работает приблизительно до 60 градусов в широком диапазоне комбинаций углов при используемой конфигурации. Для достижения эффекта взаимной компенсации в более широком диапазоне можно объединить несколько передатчиков или приемников. Прибор со скрещенными диполями или трехосный прибор можно использовать для синтезирования векторов диполей при углах наклона, обеспечивающих оптимальную взаимную компенсацию сигналов от слоя.
На фиг. 7 показаны интегральные геометрические факторы для высокопроводящей среды. Эти факторы относятся к прибору с одним передатчиком и одним приемником, работающему на частоте f=500 Гц с базой измерений d1=24 футов при угле падения пласта θdip=30° в зоне, имеющей сопротивление R=1 Ом. Кривая 771 относится к углу наклона передатчика, равному 0°, и углу наклона приемника, равному 45°. Кривая 772 относится к углу наклона передатчика, равному 44,5°, и углу наклона приемника, равному 44,5°. Кривая 773 относится к углу наклона передатчика, равному 42,5°, и углу наклона приемника, равному 42,5°. Кривая 774 относится к углу наклона передатчика, равному 40,5°, и углу наклона приемника, равному 40,5°. Хотя очень хорошей взаимной компенсации можно достичь при любом угле падения пласта для фона с высоким удельным сопротивлением, в высокопроводящей среде наблюдается уменьшение показателей взаимной компенсации, как показано на фиг. 7. Здесь оптимальные показатели достигаются при 42,5°, как показано кривой 773. Работа при более низких частотах обеспечивает успешную взаимную компенсацию при более высоких значениях удельной проводимости.
На фиг. 8 показаны геометрические факторы, связанные с двумя различными базами измерений. На фиг. 8 показано вычитание геометрических факторов, связанных с двумя различными базами измерений. Эти факторы относятся к скважинному прибору, работающему на частоте f=500 Гц в зоне с высоким удельным сопротивлением при угле падения пласта θdip=0° с базой измерений d1=24 фута, имеющей сигнал, показанный кривой 891, и с базой измерений d1=20 футов, имеющей сигнал, показанный кривой 892. Геометрические факторы для базы измерений 24 фута вычитаются из геометрических факторов для базы измерений 20, как показано кривой 893. Из фиг. 8 видно, что, используя вычитание, можно минимизировать геометрический фактор вокруг задней стороны прибора и сфокусировать его в переднем направлении. Сигналы, обсуждаемые в настоящем документе, представлены в миллисименсах. Такие сигналы могут быть получены путем умножения напряжений на соответствующие коэффициенты прибора, используя хорошо известные процедуры.
На фиг. 9А-9С показаны три варианта осуществления конфигураций с взаимной компенсацией сигналов от слоя и соответствующие зоны чувствительности. Фиг. 9А относится к абсолютному измерению, фиг. 9В - к измерению отношений, и фиг. 9С - к измерению компенсационным методом. Измерение отношений, показанное на фиг. 9В, позволяет устранить необходимость в калибровке передатчика, поскольку исключается любое мультипликативное воздействие на сигнал передатчика. Угол наклона первого и второго приемников можно регулировать по-разному в целях взаимной компенсации. Взаимная компенсация может одновременно быть достигнута на обоих приемниках. Компенсированное измерение, показанное на фиг. 9С, может дополнительно устранить потребность в калибровке как передатчиков, так и приемников, а также исключить мультипликативное воздействие изменений температуры на приемники. Взаимная компенсация может одновременно быть достигнута на обоих приемниках для обоих передатчиков, особенно если расстояние между антеннами перед прибором и позади прибора поддерживается небольшим. В различных вариантах осуществления одна из антенн может размещаться как можно ближе к долоту, чтобы увеличить глубину обнаружения в зоне перед долотом.
На фиг. 10А и фиг. 10В показаны примеры конфигураций глубинного измерения и малоглубинного измерения. Как правило, в общей сложности могут использоваться четыре антенны: передатчик и приемник для малоглубинных измерений и передатчик и приемник для глубинных измерений. Однако, как показано на фиг. 10А, для уменьшения количества антенных элементов можно использовать общий передатчик или приемник. Глубинное измерение отличается чувствительностью, которая распространяется дальше, чем в случае малоглубинного измерения, и позволяет принимать сигналы раньше, чем малоглубинное измерение, когда начинается бурение. При глубинном измерении обычно используется большая база измерений передатчик-приемник; однако это не является абсолютно необходимым. Более низкие рабочие частоты могут обеспечить большие расстояния исследования, чем высокие частоты для той же антенной пары передатчика-приемника. Типовая база измерений между передатчиком и приемником для глубинного измерения составляет 20-100 футов, а база измерений между передатчиком и приемником для малоглубинного измерения - от 2 футов до 20 футов. Малоглубинная база измерений может быть достаточно велика, чтобы обеспечить компенсацию чувствительности к влиянию ствола скважины и влиянию проникновения на данные измерения. Для обеспечения оптимальной фокусировки малоглубинное измерение следует производить как можно ближе к буровому долоту. Глубинная чувствительность возрастает с увеличением углов наклона передатчика и приемника, однако при этом также усиливается влияние ствола скважины и оправки скважинного прибора. По меньшей мере один передатчик или приемник может быть наклонен для обеспечения азимутальной чувствительности. Азимутальная чувствительность играет важную роль при геонавигационных применениях, поскольку позволяет определять различие между сигналами, поступающими с разных направлений. Типовыми диапазонами частот для малоглубинных и глубинных измерений является 500 Гц - 10 МГц и 50 Гц - 100 кГц. Для установления различия между разными расстояниями до глубинных слоев могут использоваться несколько частот. На фиг. 10В показано, что для малоглубинных или глубинных измерений могут использоваться приборы в существующей конфигурации, например, серийно выпускаемый прибор. Такой прибор может быть реализован при помощи датчика азимутального удельного сопротивления при глубинном исследовании АУСГИ (ADR).
Датчик АУСГИ (ADR), имеющий наклонные антенны в азимутальной решетке, может собирать данные измерений по ряду дискретных направлений, называемых бинами или направлениями бинов, обеспечивая несколько различных глубин исследования для определения расстояния и направления до нескольких границ пластов. Например, АУСГИ (ADR) может быть выполнен по схеме с передатчиками и приемниками, позволяющей использовать 32 дискретных направления и 14 различных глубин исследования. Однако в схемах АУСГИ (ADR) можно использовать больше или меньше 32 дискретных направлений, и больше или меньше 14 различных глубин исследования. Датчик АУСГИ (ADR) может добавлять к результатам измерений координату положения, используя наклонные антенны приемника и собирая данные со всех возможных баз измерения между приемниками и передатчиками некоторое количество раз (соответствующее количеству бинов) на оборот скважинного прибора. Наклон приемников придает направленную чувствительность системе датчиков АУСГИ (ADR). Показания с большим радиусом исследования, полученные при помощи АУСГИ (ADR), позволят улучшить время реакции, обеспечивая более высокую скорость бурения. Датчик АУСГИ (ADR) может обеспечить возможность полностью компенсированных измерений удельного сопротивления пласта и геонавигационных измерений с большим радиусом исследования (в дальней зоне пласта), объединенных в одном скважинном приборе, с целью минимизации длины компоновки низа бурильной колонны КНБК (ВНА). Азимутальные показания обеспечивают получение значений анизотропных удельных сопротивлений, Rh (горизонтального) и Rv (вертикального), и угла падения пласта.
На фиг. 11 показано сравнение дифференциального измерения в течение заданного времени с измерением при взаимной компенсации сигналов от слоя. Измерение с взаимной компенсацией сигналов от слоя в этом примере выполняется при угле наклона передатчика и угле наклона приемника, равном 55°, со скважинным прибором, работающим на частоте 500 Гц в зоне с высоким удельным сопротивлением, где сигнал представлен кривой 1142. Дифференциальное измерение в течение заданного времени в этом примере выполняется при угле наклона передатчика 0° и угле наклона приемника 45°, где дифференциальный сигнал представлен кривой 1141. Результат дифференциального измерения в течение заданного времени можно вычислить путем вычитания сигнала, полученного при одном положении прибора, из сигнала при другом положении прибора, отличающемся от него на 0,2 дюйма. Из фиг. 11 видно, что измерение с взаимной компенсацией сигналов от слоя можно сфокусировать на значительно большей глубине благодаря затуханию второго порядка по глубине, если сравнивать его с затуханием третьего порядка дифференциального измерения в течение заданного времени.
На фиг. 12 показана блок-схема варианта осуществления устройства 1200, такого как система сбора данных, имеющая скважинный прибор 1205 с передающими антеннами 1210-Т-1 … 1210-T-N и приемными антеннами 1210-R-1 … 1210-R-M, работающая в стволе скважины, куда помещается прибор 1205. Передающие антенны 1210-Т-1 … 1210-T-N и приемные антенны 1210-R-1 … 1210-R-M могут быть скомпонованы вдоль прибора 1005 так, чтобы каждая из них имела определенный угол наклона по отношению к продольной оси 1207 прибора 1005. Антенны передатчиков или антенны приемников могут иметь угол наклона, составляющий ноль градусов. По меньшей мере одна комбинация передающей антенны и приемной антенны может быть выполнена с такими углами наклона, чтобы эти передающая антенна и приемная антенна взаимно компенсировали сигналы от слоев, расположенных между передающей антенной и приемной антенной данной комбинации, и делали скважинный прибор 1205 нечувствительным к свойствам зоны, находящейся сбоку от прибора 1205, когда прибор 1205 помещают для работы в ствол скважины. Углы наклона передающей антенны и приемной антенны в такой комбинации могут быть различными. По меньшей мере одна комбинация передающей антенны и приемной антенны может быть выполнена с такими углами наклона, чтобы эти передающая антенна и приемная антенна взаимно компенсировали сигналы от слоев, расположенных за пределами зоны между передающей антенной и приемной антенной данной комбинации, когда прибор 1205 помещен для работы в ствол скважины. Углы наклона передающей антенны и приемной антенны в такой комбинации могут быть различными. Передающие антенны 1210-Т-1 … 1210-T-N и приемные антенны 1210-R-1 … 1210-R-M могут предусматривать совместное размещение антенн с различными углами наклона, при котором один или несколько углов наклона создаются синтетически и взаимная компенсация сигналов реализуется синтетически. Синтетическая взаимная компенсация может применяться для сигналов от слоев, расположенных между совмещенными антеннами или сигналов от слоев, расположенных за пределами зоны между несколькими совмещенными антеннами.
Устройство 1200 может содержать центр 1220 управления системы, передатчики 1212-1 … 1210-N, приемники 1214-1 … 1214-М, блок 1222 сбора данных, буфер 1224 данных, блок 1226 обработки данных и блок 1228 связи в дополнение к прибору 1205 с передающими антеннами 1210-Т-1 … 1210-T-N и приемными антеннами 1210-R-1 … 1210-R-M. Центр 1220 управления системы может содержать центральное процессорное устройство (ЦПУ), аналоговую электронную аппаратуру, цифровую электронную аппаратуру или различные их комбинации для управления работой других блоков устройства 1200. Центр 1220 управления системы может генерировать сигнал и подавать сигнал на передатчики 1212-1 … 1212-N. Этот сигнал может генерироваться с частотой в диапазоне от 100 Гц до 10 МГц. Могут использоваться и другие частотные диапазоны. Передатчики 1212-1 … 1212-N могут направлять токи к передающим антеннам 1210-Т-1 … 1210-T-N, излучающим электромагнитные волны в пласт. Хотя скважинный прибор 1205 выполнен с возможностью взаимной компенсации сигналов от слоев, расположенных между передающей антенной и приемной антенной выбранной комбинации, и обеспечения нечувствительности прибора 1205 к свойствам зоны, находящейся сбоку от прибора 1205, несколько передающих антенн можно использовать для сбора дополнительных данных в целях улучшения измерения параметров пласта. Например, передающие антенны на различных расстояниях от приемных антенн могут создавать изображения с различной глубиной и разрешением. В качестве другого примера, антенны с различными углами наклона или ориентациями могут использоваться для обеспечения чувствительности к анизотропным параметрам пласта.
Одна или несколько из N передающих антенн могут управляться сигналом, формируемым центром 1220 управления системы. Для применений в частотной области этот сигнал может представлять собой синусоиду требуемой частоты. В случае применения во временной области сигнал может представлять собой импульс с определенной формой и частотным спектром. Передатчики могут активироваться одновременно или последовательно, при этом они могут оставаться включенными достаточное продолжительное время, чтобы обеспечить возможность затухания переходных процессов и уменьшения влияния помех при помощи суммирования. Полученные сигналы могут быть преобразованы в область, где падающая часть сигнала может быть отделена от отраженной части. Одним из конкретных примеров такого преобразования является преобразование Гильберта. Сигналы, полученные приемниками, поступают в центр 1220 управления системы, который может сохранить их в буфере 1224 данных перед окончательной передачей на поверхность. Центр 1220 управления системы может также управлять или вмешиваться в геонавигационную операцию практически автономно, не обращаясь к поверхности, что позволяет принимать решения с минимальной задержкой.
Поступающие в виде электромагнитных волн сигналы, принимаемые приемными антеннами 1210-R-1 … 1210-R-M, могут направляться на соответствующие приемники 1214-1 … 1214-М и в центр 1220 управления системы. Работа устройства 1200 может предусматривать одновременную передачу и прием нескольких частот для более эффективного использования времени. В таком режиме работы синусоидальный сигнал, прямоугольное колебание и другие временные колебательные сигналы могут использоваться для одновременного возбуждения нескольких частот на каждой передающей антенне 1210-Т-1 … 1210-Т-М или отдельных частот на антеннах 1210-Т-1 … 1210-Т-М передатчика. Принимаемые сигналы, соответствующие нескольким частотам, могут разделяться фильтрами на приемном конце блока 1222 сбора данных. Для каждой передающей антенны 1210-Т-1 … 1210-Т-М, принимаемые сигналы могут быть зарегистрированы на всех приемниках 1214-1 … 1214-М. Буфер 1224 данных можно использовать для хранения принятого сигнала с целью его обработки.
Блок 1226 обработки данных можно использовать для выполнения инверсии или другого вида обработки данных. Выполнение обработки и инверсии могут продолжаться в соответствии с функциями обработки, аналогичными или идентичными вариантам осуществления, раскрытым в настоящей заявке. Операции инверсии могут включать в себя сравнение результатов измерения с результатами прогнозирования на основе модели так, чтобы можно было определить значение или пространственное изменение физического свойства. Традиционная операция инверсии может включать в себя определение изменения электропроводности в пласте по результатам измерений индуцированных электрических и магнитных полей. Другие методы, такие как прямое моделирование, нацелены на вычисление ожидаемых наблюдаемых значений с учетом принятой модели. В различных вариантах осуществления процесс инверсии, выполняемый с использованием устройства 1200, может осуществляться в стволе скважины или в блоке анализа, таком как компьютер, на поверхности 1204 после передачи данных на поверхность 1204. Блок 1228 связи может передавать данные или результаты на поверхность 1204 с целью наблюдения и/или определения последующих действий, которые должны быть предприняты в ходе операции бурения с учетом измерений, выполненных при помощи устройства 1200. Данные или результаты можно также передавать другим скважинным приборам и использовать для улучшения различных аспектов определения местоположения и извлечения углеводородов.
С полученными малоглубинными и глубинными данными можно выполнить грубую инверсию полного набора всех полученных результатов измерений. Однако вместо этого усовершенствованная обработка может быть достигнута при помощи процедуры, подразделяющей всю операцию на две части: вычисление прогнозного сигнала и вычисление свойств слоя в пласте по прогнозному сигналу. Этот состоящий из двух частей подход позволяет выполнять интерпретацию непосредственно по прогнозному сигналу, даже если решение для горизонтального удельного сопротивления Rh, вертикального удельного сопротивления Rv и положения глубинного слоя не является уникальным.
На фиг. 13 показаны особенности примера осуществления способа вычисления прогнозного сигнала при помощи малоглубинной и глубинной инверсии. При таком вычислении можно использовать преимущества полной инверсии с использованием малоглубинного сигнала 1311 и глубинного сигнала 1312. Малоглубинный сигнал 1311 и глубинный сигнал 1312 могут быть предусмотрены для численной инверсии 1331. При численной инверсии 1331 может использоваться ряд различных традиционных методов, включая, помимо прочего, сопоставление с образцом и итерационные методы. Библиотека 1332 и прямая модель 1333 могут способствовать численной инверсии 1331. Инвертированные параметры скважины на основе поправки 1334 на влияние скважины могут подаваться обратно на вход численной инверсии 1331 для получения более точных оценок. Выход численной инверсии 1331 может содержать удельные сопротивления (Rh, Rv) слоя, данные о положении (z) слоя, угол (θ) падения, угол (φ) простирания, радиус (rb) ствола скважины, удельное сопротивление (Rb) ствола скважины, эксцентриситет (decc) и азимут (φecc) эксцентриситета. Эти параметры могут подаваться обратно к поправке 1334 на влияние скважины для обновления поправки 1334 на влияние скважины. Эти коэффициенты могут также передаваться вперед с целью предоставления данных о слоях вокруг или позади скважинного прибора 1335 для дальнейшей обработки. Удельные сопротивления (Rh, Rv) глубинного слоя, данные о положении (z) глубинного слоя, полученные при помощи численной инверсии 1331, не предоставляют для определения прогнозного сигнала; эти данные сохраняют для дальнейшей обработки с помощью измеренного глубинного сигнала 1312, относящегося к слоям вокруг или позади прибора. Данные о слоях, расположенных вокруг или позади прибора 1335, могут быть предоставлены для прямого моделирования 1336, чтобы получить глубинную конфигурацию, коррелированную со слоями вокруг и позади прибора. На выходе прямого моделирования 1336 получают моделированный сигнал, представляющий собой ожидаемый глубинный сигнал от слоев вокруг прибора, который может быть направлен к вычитающему узлу 1337. Прогнозный сигнал может быть получен путем вычитания ожидаемого глубинного сигнала от слоев вокруг прибора из измеренного глубинного сигнала.
На фиг. 14 показаны особенности примера осуществления способа вычисления прогнозного сигнала при помощи только малоглубинного сигнала 1411. В этом случае все инвертированные слои находятся вблизи скважинного прибора, так как малоглубинное вычисление наиболее чувствительно вблизи прибора. Малоглубинный сигнал 1411 может быть предусмотрен для численной инверсии 1431. При численной инверсии 1431 может использоваться ряд различных традиционных методов, включая, помимо прочего, сопоставление с образцом и итерационные методы. Библиотека 1432 и прямая модель 1433 могут способствовать численной инверсии 1431. Инвертированные параметры скважины на основе поправки 1434 на влияние скважины могут подаваться обратно на вход численной инверсии 1431 для получения более точных оценок. Выход численной инверсии 1431 может содержать удельные сопротивления (Rh, Rv) слоя, координаты (z) слоя, угол (θ) падения, угол (φ) простирания, радиус (rb) ствола скважины, удельное сопротивление (Rb) ствола скважины, эксцентриситет (decc) и азимут (φесс) эксцентриситета. Эти параметры могут подаваться обратно к поправке 1434 на влияние скважины для обновления поправки 1434 на влияние скважины. Эти коэффициенты могут также передаваться вперед к прямому моделированию 1436 с глубинной конфигурацией для получения сигнала, включающего в себя только слои возле скважинного прибора. На выходе прямого моделирования 1436 получают моделированный сигнал, включающий в себя только находящиеся вблизи прибора слои, который может быть направлен к вычитающему узлу 1437. В результате, когда моделированный сигнал вычитают из измеренного глубинного сигнала 1412, может быть получен прогнозный сигнал.
На фиг. 15 изображен пример осуществления вычисления прогнозного сигнала при помощи деконволюции. Такое вычисление прогнозного сигнала можно выполнить способом, не содержащим инверсию. В этом случае прямое моделирование 1541 может выполняться для получения малоглубинных геометрических факторов 1542 как функции глубины, связанной с глубинными конфигурациями. Прямое моделирование 1543 может выполняться для получения глубинных геометрических факторов 1544 как функции глубины, связанной с малоглубинными конфигурациями. Угол падения пласта может быть предоставлен для прямого моделирования 1541 и прямого моделирования 1543. Один из способов получения геометрического фактора состоит в создании синтетической каротажной диаграммы пласта, состоящей из фонового удельного сопротивления и очень тонкого слоя на глубине 0. Предполагается, что фоновое удельное сопротивление достаточно велико по сравнению с инверсией частоты, и в этом случае не будет наблюдаться значительный скин-эффект. Ожидается также, что способ, изображенный на фиг. 15, будет работать при наличии некоторых скин-эффектов, но при таком способе используются специальные геометрические факторы, вычисляемые с учетом удельного сопротивления. Однако итоговый прогнозный сигнал может быть засорен малоглубинным сигналом вследствие нелинейности, вызываемой скин-эффектом.
После вычисления геометрических факторов рассчитывают фильтр путем деконволюции малоглубинного геометрического фактора по глубинному геометрическому фактору 1545. В геонавигационных применениях нет доступа к будущим значениям сигналов, поэтому фильтр может быть преобразован в каузальный фильтр 1551, например, при помощи принудительной установки нулевых значений на проектируемой стороне фильтра и добавления суммы удаленных значений к последнему доступному коэффициенту фильтра. В ситуациях, когда ориентация диполей передатчика и приемника не оптимальна (например, если они не обеспечивают хорошую взаимную компенсацию сигналов от слоя), передатчик и приемник можно поворачивать на любой угол, при условии, что можно выполнить измерения методом скрещенных диполей в целях оптимизации 1552 ориентации диполя для глубинного сигнала 1512 и оптимизации 1554 ориентации диполя для малоглубинного сигнала 1511. В ситуациях, когда передающие или приемные антенны поворачиваются, итоговые ориентации различных дипольных антенн могут комбинироваться в целях аналогичной оптимизации.
Применение 1556 фильтра к малоглубинному сигналу выравнивает его разрешение и центрирование по отношению к глубинному измерению, обеспечивая преобразованный малоглубинный сигнал 1157. Это позволяет эффективно вычитать малоглубинный сигнал из глубинного сигнала на вычитающем узле 1537, не создавая эффекты, вызванные разностью разрешений. Процедура 1555 внесения поправки на глубину скин-эффекта и влияние скважины для малоглубинного сигнала 1511 и процедура 1553 внесения поправки на глубину скин-эффекта и влияние скважины для глубинного сигнала 1512 может также быть применена до вычитания и фильтрации для устранения и, тем самым, выравнивания, глубины скин-эффекта и влияния скважины. Указанная методика свободна от инверсии и может применяться даже в ситуациях, когда применение инверсии, как предполагается, было бы не очень успешным. Обработка данных по этой методике выполняется очень быстро, что позволяет применять ее при геонавигации, так как большая часть вычислений приходится на применение фильтра.
На фиг. 16 изображен пример осуществления вычисления свойств глубинного слоя при помощи полной инверсии. Несмотря на то, что в таких применениях может быть полезен только прогнозный сигнал, может оказаться желательным вычислить удельное сопротивление и данные о положении слоев впереди долота. Это можно осуществить при помощи алгоритма инверсии, учитывающего всю известную информацию, такую как параметры слоя, окружающего скважинный прибор, как показано на фиг. 16. Прогнозный сигнал может быть предоставлен для инверсии 1631 наряду с параметрами, определенными вблизи прибора, такими как удельные сопротивления (Rh, Rv) слоя, координаты (z) слоя, угол (θ) падения, угол (φ) простирания, радиус (rb) ствола скважины, удельное сопротивление (Rb) ствола скважины, эксцентриситет (decc) и азимут (φесс) эксцентриситета. Библиотека 1632 и прямая модель 1633 могут способствовать инверсии 1631. Инверсия 1631 может предусматривать использование одного или нескольких методов, включая, помимо прочего, аналитические формулы, сопоставление с образцом и итерационные методы для получения на выходе удельных сопротивлений (Rh, Rv) глубинного слоя и данных о положении (z) глубинного слоя.
На фиг. 17 изображен пример осуществления вычисления свойств глубинного слоя при помощи простой инверсии. В случаях когда известны только угол (θ) падения и угол (φ) простирания, изменение удельного сопротивления и положение слоя могут быть получены при помощи инверсии, как показано на фиг. 17. Прогнозный сигнал может быть предоставлен для инверсии 1731 наряду с углом (θ) падения и углом (φ) простирания. Библиотека 1732 и прямая модель 1733 могут способствовать инверсии 1731. Инверсия 1731 может предусматривать использование одного или нескольких методов, включая, помимо прочего, аналитические формулы, сопоставление с образцом и итерационные методы для получения на выходе удельных сопротивлений (Rh, Rv) глубинного слоя и данных о положении (z) глубинного слоя. Поскольку геометрический фактор обратно пропорционален квадрату расстояния до границы слоя, для инверсии можно использовать аналитические формулы. Так как значительные изменения удельного сопротивления могут указывать на значительные изменения давления, результаты этого вычисления можно использовать для приостановки бурения в целях безопасности до приближения к опасным зонам.
На фиг. 18 изображен пример осуществления вычисления свойств глубинного слоя при помощи инверсии. Способ вычисления, показанный на фиг. 18, можно использовать для инвертирования расстояния и удельного сопротивления слоев.
Вычисление можно начать с угла (θ) падения и угла (φ) простирания, предоставляемых для прямого моделирования 1833. Если глубина скин-эффекта достаточно невелика, или если ее можно в достаточной степени компенсировать, между удельной проводимостью в каждом слое и сигналом, генерируемым ей на приемниках, существует практически линейная зависимость. В результате, принимая во внимание, что сигнал обусловлен небольшим возмущением при распределении удельной проводимости, можно прогнозировать, каким будет вклад сигнала для слоя с любой удельной проводимостью. Для этого в блоке 1831, на основе прямого моделирования 1833, может генерироваться переходная характеристика Un(d) при ступенчатом возмущении с помощью синтетического каротажа двухслойного пласта, где между удельными проводимостями слоев существует лишь очень небольшой скачок Δσ. В блоке 1832, исходя из свойства линейности, полный сигнал n-го измерения на глубине z в случае однослойного возмущения может быть записан в виде

где σcontrast - разность удельных проводимостей между слоем, в котором находится скважинный прибор, и слоем, расположенным впереди прибора, a σbackground - удельная проводимость, обусловленная слоем, в котором прибор находится в данный момент. В блоке 1834, чтобы устранить эффект неизвестного фона, может быть вычислен дифференциальный сигнал

В блоке 1835 эффект скачка удельной проводимости можно устранить, учитывая отношение дифференциальных сигналов n-го и m-го измерений следующим образом:

Прогнозный сигнал, σn(z) при n-м измерении на глубине z может быть предоставлен в блоке 1836 для вычисления дифференциального сигнала DSn(z)=(σn(z)-σn(z-Δz)).
В блоке 1837 отношение дифференциальных сигналов может быть вычислено с использованием результата блока 1836 в виде RDSnm(z)=DSn(z)/DSm(z). В блоке 1838, как показано на фиг. 16, дифференциальный сигнал, полученный с помощью измерений, может быть инвертирован для расстояния dnm(z) и удельной проводимости 


В различных вариантах осуществления раскрытые в настоящей заявке схемы обработки могут повторяться, при этом к ним могут добавляться новые измерения по мере бурения/ перемещения прибора. На фиг. 19 изображен пример осуществления схемы принятия геонавигационных решений. Для визуального и/или алгоритмического исследования 151, на основании которого принимается геонавигационное решение, могут быть предоставлены прогнозный сигнал наряду с удельными сопротивлениями (Rh, Rv) глубинного слоя и данными о положении (z) глубинного слоя. Геонавигационные решения могут приниматься лицом, наблюдающим за результатами обработки измерений на поверхности. Альтернативно, геонавигационные решения могут приниматься в стволе скважины автоматизированной системой. Автоматизированная система может реагировать быстрее из-за наличия естественного отставания при доставке данных на поверхность, связанного со скважинной телеметрией. Прогнозный сигнал пропорционален величине скачка удельного сопротивления и расстоянию, на котором имеет место изменение. Вследствие этого прогнозный сигнал может содержать полезные указания на характер приближающихся слоев. Поскольку глубинные слои, расположенные далеко и отличающиеся значительным скачком свойств, создают сигнал, очень похожий на сигнал от ближних слоев с небольшим скачком удельного сопротивления, в некоторых случаях трудно выявить однозначные результаты для удельного сопротивления и расстояния. В таких случаях для принятия решения можно использовать сам прогнозный сигнал. Еще один альтернативный вариант заключается в использовании априорных сведений об удельных сопротивлениях слоев или расстояниях для устранения проблемы неоднозначности.
Известные из научной литературы усилия сосредоточены на повышении чувствительности в зоне впереди скважинного прибора, однако уменьшение чувствительности в зоне, окружающей прибор, не рассматривается. Вследствие этого, существующие приборы получают смесь сигналов из зоны, окружающей прибор, и зоны, расположенной перед ним. В некоторых вариантах осуществления для достижения эффекта взаимной компенсации сигналов от слоев, расположенных между передатчиками и приемниками, можно использовать специальные углы наклона антенны. Это позволяет практически полностью исключить чувствительность к данным слоям. Кроме того, может применяться альтернативный способ, в котором для уменьшения чувствительности к слоям, расположенным вблизи от прибора, используются деконволюция и инверсия данных от нескольких баз измерения. Полученный в итоге способ может обеспечить возможность прогнозирования в практических сценариях с несколькими слоями, обладающими различными удельными сопротивлениями, в отличие от способов, испытывающих значительные трудности и осложнения.
На фиг. 20 показаны геометрические факторы, связанные с двумя различными базами измерений между передатчиком и приемником. В этом примере 4-футовая база измерений используется для малоглубинного измерения на частоте 15 кГц с антенной, наклоненной под углом 45°, и антенной, наклоненной под углом 0°, обеспечивающего сигнал, показанный кривой 2096. 24-футовая база измерений используется для глубинного измерения на частоте 500 Гц с антенной, наклоненной под углом 45°, и антенной, наклоненной под углом 0°, обеспечивающего сигнал, показанный кривой 2097. Удаление прибора определяется как истинно вертикальное положение прибора вдоль оси z, где ось z направлена вверх. Из фиг. 20 видно, что глубинное измерение более чувствительно к глубинным координатам (z>0). Чувствительность максимальна и постоянна, когда граница слоя находится между передатчиком и приемником (-4<z<0 для малоглубинных измерений и -24<z<0 для глубинных измерений). Деконволюционный фильтр рассчитывают по этим двум кривым, как показано на фиг. 21, на котором изображен некаузальный деконволюционный фильтр. Фильтр, показанный на фиг. 22, выполнен каузальным.
На каждом из фиг. 23 и фиг. 24 показана синтетическая каротажная диаграмма с нулевым углом падения пласта и четырьмя слоями в процессе инверсии. Границы слоев показаны вертикальными линиями 2304, 2306 и 2308, при этом в каждой зоне указано удельное сопротивление каждого слоя. На фиг. 23 показан передатчик, работающий на частоте 500 Гц, с углом наклона 45° и базой измерений 24 фута до антенны приемника, имеющей угол наклона 0°, и передатчик, работающий на частоте 15 кГц с углом наклона 45° и базой измерений 4 фута до той же антенны приемника. Кривая 2341 представляет глубинный сигнал. Кривая 2342 представляет малоглубинный сигнал. Кривая 2343 представляет преобразованный малоглубинный сигнал. Кривая 2344 представляет прогнозный сигнал. На фиг. 24 показан передатчик, работающий на частоте 500 Гц, с углом наклона 55° и базой измерений 24 фута до антенны приемника, имеющей угол наклона 55°, и передатчик, работающий на частоте 15 кГц с углом наклона 55° и базой измерений 4 фута до той же антенны приемника. Кривая 2441 представляет глубинный сигнал. Кривая 2442 представляет малоглубинный сигнал. Кривая 2443 представляет преобразованный малоглубинный сигнал. Кривая 2444 представляет прогнозный сигнал. Предполагается, что скважинный прибор перемещается от z=200 футов до z=-200 футов, где глубина определяется как -z. Способ инверсии, показанный на фиг. 14, используется для вычислений малоглубинного и прогнозного сигналов. Видно, что прогнозный сигнал четко указывает на приближающиеся слои, при этом более высокие сигналы получены для большего скачка удельного сопротивления. Расстояние и удельное сопротивление приближающегося слоя можно определить по инверсии, воспользовавшись преимуществом профиля прогнозной кривой, как обсуждалось выше. Хотя единственная база измерений обеспечивает достаточную информацию для таких измерений, более высокую точность можно получить при использовании нескольких глубинных баз измерений. Значительно более высокие уровни сигналов получены на фиг. 24, где как передающие, так и приемные антенны наклонены для достижения взаимной компенсации сигналов от слоев и глубинной фокусировки.
На фиг. 25 показаны результаты, полученные для конфигурации, представленной на фиг. 23, с использованием методики деконволюции, изображенной на фиг. 15. На фиг. 25 показан передатчик, работающий на частоте 500 Гц, с углом наклона 45° и базой измерений 24 фута до антенны приемника, имеющей угол наклона 0°, и передатчик, работающий на частоте 15 кГц с углом наклона 45° и базой измерений 4 фута до той же антенны приемника. Кривая 2541 представляет глубинный сигнал. Кривая 2542 представляет малоглубинный сигнал. Кривая 2543 представляет преобразованный малоглубинный сигнал. Кривая 2544 представляет прогнозный сигнал. Полученные результаты сравнимы с результатами способа инверсии, однако здесь наблюдается некоторый шум, обусловленный каузальной реализацией и глубиной скин-эффекта.
На фиг. 26 и фиг. 27 показано сравнение стандартной конфигурации и конфигурации с взаимной компенсацией сигналов от слоев для практического случая с большим количеством слоев с изменяющимся удельным сопротивлением. На фиг. 26 показана синтетическая каротажная диаграмма с 2 зонами (разделенными границей раздела 2604) и 20 слоями для стандартной конфигурации измерений. На фиг. 27 показана синтетическая каротажная диаграмма с 2 зонами (разделенными границей раздела 2604) и 20 слоями для конфигурации с взаимной компенсацией сигналов от слоев. В этом примере удельное сопротивление первой зоны находится в диапазоне между 2,5 и 3,8 Ом·м, а удельное сопротивление второй зоны - между 22 и 27 Ом·м с границей раздела 2604 между зонами. В обеих конфигурациях используются одни и те же местоположения антенн, но с разными углами наклона. На фиг. 26 показана антенна, имеющая угол наклона 45° с базой измерений 24 фута до антенны, имеющей угол наклона 0° и работающей на частоте 500 Гц, и антенна, имеющая угол наклона 45° с базой измерений 4 фута до другой антенны, имеющей угол наклона 0° и работающей на частоте 15 кГц. На фиг. 27 показана антенна, имеющая угол наклона 55° с базой измерений 24 фута до антенны, имеющей угол наклона 55° и работающей на частоте 500 Гц, и антенна, имеющая угол наклона 55° с базой измерений 4 фута до другой антенны, имеющей угол наклона 0° и работающей на частоте 15 кГц. Кривая 2651 представляет глубинный сигнал. Кривая 2652 представляет малоглубинный сигнал. Кривая 2653 представляет преобразованный малоглубинный сигнал. Кривая 2654 представляет прогнозный сигнал. Кривая 2751 представляет глубинный сигнал. Кривая 2752 представляет малоглубинный сигнал. Кривая 2753 представляет преобразованный малоглубинный сигнал. Кривая 2754 представляет прогнозный сигнал.
В конфигурации с взаимной компенсацией сигналов от слоев углы наклона для измерения с большим радиусом (глубинных показаний) в примере с базой измерений 24 фута между антеннами заданы такими, чтобы достичь эффекта, изображенного на фиг. 3. В стандартной конфигурации граничный эффект становится значительным приблизительно на расстоянии 5 футов от границы благодаря большой чувствительности к слоям, расположенным между нижней и средней антенной. Для конфигурации с взаимной компенсацией сигналов глубина обнаружения увеличивается до 15 футов. Другая важная функция взаимной компенсации сигналов от слоев состоит в том, что сама форма глубинного сигнала также непосредственно указывает на слои, расположенные впереди и позади прибора, как показано, например, на фиг. 9. Влияние слоев, расположенных позади прибора, устраняется при помощи процесса, изображенного на фиг. 14, и не может наблюдаться в прогнозном сигнале. Плато, наблюдаемое между глубинами 0 и 20 футов, обусловлено нечувствительностью прибора к пластам между средней антенной и нижней антенной. Этот эффект устраняется за счет использования такой конфигурации, как показана на фиг. 23.
На фиг. 28А-С показан пример модели переходной характеристики при ступенчатом возмущении и примеры моделей дифференциальных сигналов. На фиг. 28А показана модель переходной характеристики при ступенчатом возмущении, на фиг. 28В показана модель дифференциального сигнала, а на фиг. 28С показана модель отношения дифференциальных сигналов. Эти модели могут быть получены при помощи уравнений, связанных с фиг. 16. Может применяться скважинный прибор с несколькими базами измерений. Несколько баз измерений на фиг. 28А-С с четырьмя антеннами, каждая под углом 55°, включают в себя базы измерений 3 фута, работающую на частоте 32000 Гц, 6 футов, работающую на частоте 8000 Гц, 12 футов, работающую на частоте 2000 Гц, и 24 фута, работающую на частоте 500 Гц, от общей антенны с углом наклона 55°. Поскольку предполагается, что ступенчатый переход профиля происходит при z=0, удаление прибора равно расстоянию до границы для положительных значений. Кривая 2861 представляет переходную характеристику для базы измерений 3 фута. Кривая 2862 представляет переходную характеристику для базы измерений 6 футов. Кривая 2863 представляет переходную характеристику для базы измерений 12 футов. Кривая 2864 представляет переходную характеристику для базы измерений 24 фута. Кривая 2871 представляет дифференциальный сигнал для базы измерений 3 фута. Кривая 2872 представляет дифференциальный сигнал для базы измерений 6 футов. Кривая 2873 представляет дифференциальный сигнал для базы измерений 12 футов. Кривая 2874 представляет дифференциальный сигнал для базы измерений 24 фута. Кривая 2881 представляет отношение дифференциальных сигналов для отношения базы измерений 3 фута к базе измерений 6 футов. Кривая 2882 представляет отношение дифференциальных сигналов для отношения базы измерений 6 футов к базе измерений 12 футов. Кривая 2881 представляет отношение дифференциальных сигналов для отношения базы измерений 12 футов к базе измерений 24 фута. Из графика дифференциального сигнала видно, что для каждого значения дифференциального сигнала в рассматриваемом диапазоне можно определить однозначное расстояние до границы. Чувствительность дифференциального сигнала с расстоянием до границы уменьшается по мере возрастания последнего. Аналогичные наблюдения могут быть сделаны для отношения дифференциальных сигналов.
На фиг. 29 показаны сигналы с поправкой на скин-эффект для типового случая, где имеется несколько границ и две зоны. В этом примере показаны несколько баз измерений с четырьмя антеннами, каждая под углом 55°, с соответствующими базами измерений 3 фута, работающей на частоте 32000 Гц, 6 футов, работающей на частоте 8000 Гц, 12 футов, работающей на частоте 2000 Гц, и 24 фута, работающей на частоте 500 Гц, от общей антенны с углом наклона 55°. Примеры значений удельной проводимости показаны на ФИГ. 29. Кривая 2951 представляет сигнал для базы измерений 3 фута. Кривая 2952 представляет сигнал для базы измерений 6 футов. Кривая 2953 представляет сигнал для базы измерений 12 футов.
Кривая 2954 представляет сигнал для базы измерений 24 фута.
На фиг. 30А-В показано инвертированное расстояние до границы и скачок удельной проводимости для случая, представленного на фиг. 29. В этом примере показаны несколько баз измерений с четырьмя антеннами, каждая под углом 55°, с соответствующими базами измерений 3 фута, работающей на частоте 32000 Гц, 6 футов, работающей на частоте 8000 Гц, 12 футов, работающей на частоте 2000 Гц, и 24 фута, работающей на частоте 500 Гц, от общей антенны с углом наклона 55°. Значения инвертированного расстояния до границы и скачка удельной проводимости могут быть получены при помощи алгоритма, связанного с фиг. 18. На фиг. 30А кривая 3081 представляет расстояние для отношения 3-футовой базы измерений к 6-футовой базе измерений. Кривая 3082 представляет расстояние для отношения 6-футовой базы измерений к 12-футовой базе измерений. Кривая 3083 представляет расстояние для отношения 12-футовой базы измерений к 24-футовой базе измерений. На фиг. 30В область 3091 представляет скачок удельной проводимости для 3-футовой базы измерений. Область 3092 представляет скачок удельной проводимости для 6-футовой базы измерений. Область 3094 представляет скачок удельной проводимости для 24-футовой базы измерений. В этом случае вместо прогнозного сигнала непосредственно используются полные сигналы, показанные на фиг. 29. Это может дать хорошие результаты благодаря свойству взаимной компенсации сигналов от слоев для измерения, при котором сигнал фокусируется впереди скважинного прибора. Несмотря даже на то, что при этом возникает некоторая фокусировка позади прибора, чувствительность в задней зоне не порождает артефактов, если позади прибора не возникают значительные изменения удельной проводимости по мере его приближения к границе зоны. База измерений для дифференциального измерения выбрана в этом примере при Δz=2 фута. Это достаточно большая величина, чтобы исключить влияние шума измерения и достаточно малая, чтобы сделать возможным измерение малой глубины обнаружения. Из рисунка видно, что два самых глубоких измерения в этом примере при базе измерения 24 фута и 12 футов позволяют получать значения расстояния и удельного сопротивления на удалении приблизительно 15 футов от границы. Значения удельного сопротивления, полученные из этого алгоритма, близки к фактическому скачку, составляющему около 300-400 мкСм. Результат измерения расстояния также близок к фактическим значениям. При использовании раскрытого в настоящей заявке варианта осуществления способа инверсии можно успешно достичь определения требуемых параметров, даже без полного выделения прогнозного сигнала и при нескольких слоях. В ходе дополнительных испытаний было определено, что, если взаимная компенсация сигналов от слоев не используется, то сигнал от нескольких слоев подавляет результаты и инверсия оказывается неэффективной.
Приборы с прогнозированием сопротивления в районе долота дают возможность выполнять измерения еще не пробуренных пластов и позволяют принимать более точные геонавигационные решения в целях максимального увеличения добычи и уменьшения опасных ситуаций, таких как бурение в зонах аномальных давлений. Предпринимаемые в настоящее время усилия сконцентрированы на увеличении чувствительности в зоне перед скважинным прибором, но не учитывают в полной мере чувствительность в зоне, окружающей прибор. Прибор, обладающий большой чувствительностью в окружающей зоне, будет, как ожидается, испытывать значительно большие трудности при измерении сигнала впереди прибора. В различных вариантах осуществления устройство выполнено с возможностью практически полного подавления чувствительности при электромагнитных исследованиях с большим радиусом в зонах, расположенных сбоку от измерительного скважинного прибора, и фокусировки впереди прибора. Такая схема может обеспечить повышенную чувствительность измерения по сравнению с приборами и способами, подавляющими прямой сигнал между передатчиком и связанным с ним приемником на скважинном приборе за счет использования специальных углов наклона. Данная значительно повышает эффективность прибора с большим радиусом исследования, поскольку одним из крупнейших рисков, связанных с физическими свойствами датчика, считаются осложнения, обусловленные слоями, окружающими прибор. Приборы, выполненные и предназначенные для работы в соответствии с вариантами осуществления, аналогичными или идентичными вариантам осуществления, раскрытым в настоящей заявке, могут применяться при геонавигации и измерениях порового давления.
Различные компоненты измерительного прибора и блока обработки, генерирующего прогнозный сигнал и свойства пласта в зоне перед буровым долотом при помощи малоглубинных и глубинных измерений с использованием или без использования пары антенн передатчик-приемник, ориентированной на взаимную компенсацию или практически полную взаимную компенсацию сигналов от слоев, расположенных между антенной передатчика и антенной приемника, в ответ на работу передатчика в стволе скважины, как раскрыто в настоящем документе или аналогичным образом, могут быть реализованы в виде комбинаций аппаратных и программных средств. Эти варианты реализации могут включать в себя машиночитаемый носитель, содержащий машиноисполняемые команды, такой как компьютерно-читаемый носитель с компьютерно-исполняемыми командами, для работы системы, осуществляющей управление активацией прибора, расположенного в стволе скважины, при этом прибор имеет группу передающих антенн и приемных антенн, разнесенных в пространстве с возможностью работы в выбранных парах передатчик-приемник; получение глубинного сигнала глубинного измерения с использованием пары передатчик-приемник и одного или нескольких малоглубинных сигналов одного или нескольких малоглубинных измерений с использованием одной или нескольких пар передатчик-приемник; обработку одного или нескольких малоглубинных сигналов с генерацией моделированного сигнала, относящегося к зонам, примыкающим к боковым и задней стороне прибора; и формирование прогнозного сигнала практически без вклада со стороны зон, примыкающих к прибору, путем обработки глубинного сигнала с учетом моделируемого сигнала. Команды могут содержать команды управления скважинным прибором, имеющим набор пар передатчик-приемник, и обработки сигналов глубинных измерений и малоглубинных измерений, аналогичных или идентичных процессам, раскрытым со ссылкой на фиг. 1-фиг.30А-В. Команды могут содержать команды управления скважинным прибором и геонавигационной операцией в соответствии с принципами настоящего изобретения. Кроме того, машиночитаемое устройство хранения данных настоящего изобретения представляет собой физическое устройство, сохраняющее данные, представляемые физической структурой внутри устройства. Примеры машиночитаемых устройств хранения данных включают, не ограничиваясь этим, постоянное запоминающее устройство ПЗУ (ROM), оперативное запоминающее устройство ОЗУ (RAM), устройство хранения данных на магнитном диске, оптическое устройство хранения данных, флэш-память и другие электронные, магнитные и/или оптические запоминающие устройства.
На фиг. 31 изображена структурная схема компонентов варранта осуществления системы 3100, содержащей измерительный скважинный прибор 3105, оснащенный группой передатчиков и приемников, в которой сигналы измерения могут быть получены для глубинных и малоглубинных измерений с целью генерации прогнозного сигнала и определения свойств пласта перед буровым долотом. Группы передатчиков 3110-1 и приемников 3110-2 измерительного прибора 3105 могут быть реализованы аналогично или идентично раскрытым выше схемам. Группы могут включать одну или несколько пар антенн приемников-передатчиков, выполненных с возможностью полной или значительной взаимной компенсации сигналов от слоев, расположенных между антенной передатчика и антенной приемника, в ответ на работу передатчика в стволе скважины.
Система 3100 может также содержать контроллер 3141, запоминающее устройство 3142, электронное устройство 3143 и блок 3145 связи. Контроллер 3141, запоминающее устройство 3142 и блок 3145 связи могут быть выполнены с возможностью управления измерительным скважинным прибором 3105 с целью определения прогнозного сигнала и свойств зоны, расположенной перед измерительным скважинным прибором 3105. Если измерительный скважинный прибор 3105 крепится к бурильной колонне на буровом долоте или поблизости от него, зона перед измерительным скважинным прибором 3105 представляет собой зону перед буровым долотом. Контроллер 3141, запоминающее устройство 3142 и электронное устройство 3143 могут быть реализованы таким образом, чтобы управлять активацией передающих антенн и выбором приемных антенн в измерительном приборе 3105, а также организовывать схемы обработки в соответствии с процедурами измерения и обработки сигналов, как здесь было описано. Блок 3145 связи может обеспечивать связь в стволе скважины в ходе операции бурения. Такая связь в стволе скважины может включать в себя систему телеметрии.
Система 3100 может также содержать шину 3147, причем шина 3147 обеспечивает электрическую проводимость между компонентами системы 3100. Шина 3147 может содержать адресную шину, шину данных и шину управления, каждая из которых имеет независимую конфигурацию. Шина 3147 может также использовать общие проводящие соединения для обеспечения одного или нескольких адресов, данных или управления, использование которых может регулироваться контроллером 3141. Шина 3147 может иметь такую конфигурацию, при которой компоненты системы 3100 распределены. Такое распределение может охватывать внутрискважинные компоненты, такие как передатчики и приемники измерительного скважинного прибора 3105 и компоненты, которые могут располагаться на поверхности скважины. Альтернативно, компоненты могут быть совмещены, например, на одной или нескольких муфтах бурильной колонны или на канатной конструкции.
В различных вариантах осуществления периферийные устройства 3146 могут содержать дисплеи, дополнительное запоминающее устройство и/или другие управляющие устройства, которые могут работать совместно с контроллером 3141 и/или памятью 3142. В одном из вариантов осуществления контроллер 3141 может быть реализован в виде одного или нескольких процессоров. Периферийные устройства 3146 могут быть выполнены с дисплеем для отображения команд, хранящихся в запоминающем устройстве 3142 для реализации пользовательского интерфейса с целью управления работой измерительного прибора 3105 и/или компонентов, распределенных в системе 3100. Такой пользовательский интерфейс может работать вместе с блоком 3145 связи и шиной 3147. Различные компоненты системы 3100 могут быть объединены с измерительным прибором 3105 так, чтобы обработка, идентичная или аналогичная схемам обработки, обсуждавшимся в связи с различными вариантами осуществления настоящего изобретения, могла быть выполнена в стволе скважины вблизи от места измерения или на поверхности.
На фиг. 32 изображен вариант осуществления системы 3200 на буровой площадке, где система 3200 содержит измерительный скважинный прибор 3205 (который может быть аналогичен или идентичен скважинному прибору 3105 на фиг. 31 в некоторых вариантах осуществления), оснащенный группой передатчиков и приемников, в которой сигналы измерения могут быть получены для глубинных и малоглубинных измерений с целью генерации прогнозного сигнала и определения свойств пласта впереди бурового долота. Группы передатчиков и приемников измерительного прибора 3105 могут быть реализованы аналогично или идентично раскрытым выше схемам. Группы могут включать одну или несколько пар антенн приемников-передатчиков, выполненных с возможностью полной или практически полной взаимной компенсации сигналов от слоев, расположенных между антенной передатчика и антенной приемника, в ответ на работу передатчика в стволе скважины.
Система 3200 может содержать буровую установку 3202, расположенную на поверхности 3204 скважины 3206, и колонну бурильных труб, то есть бурильную колонну 3208, соединенных вместе так, чтобы образовать бурильную колонну, опускаемую при помощи роторного стола 3207 в скважину или ствол скважины 3212. Буровая установка 3202 может обеспечивать опору для бурильной колонны 3208. Бурильная колонна 3208 может в процессе работы проходить внутрь роторного стола 3207 с целью бурения ствола 3212 скважины в пластах 3214. Бурильная колонна 3208 может содержать бурильную трубу 3218 и компоновку 3220 низа бурильной колонны, расположенную на нижней части бурильной трубы 3218.
Компоновка 3220 низа бурильной колонны может содержать УБТ 3215, измерительный скважинный прибор 3205 и буровое долото 3226. В различных вариантах осуществления измерительный скважинный прибор 3205 может содержать датчик, расположенный как можно ближе к буровому долоту 3226. Буровое долото 3226 в процессе работы создает ствол скважины 3212, проходя через поверхность 3204 и подземные пласты 3214. Измерительный скважинный прибор 3205 может быть предназначен для реализации в стволе скважины в виде системы ИПБ (MWD), такой как система КВБ (LWD). Измерительный скважинный прибор 3205 может быть реализован в корпусе, содержащем электронную аппаратуру для активации передающего источника и получения откликов при помощи выбранных принимающих датчиков. Такая электронная аппаратура может содержать блок обработки для анализа сигналов, полученных измерительным скважинным прибором 3205, и передачи обработанных результатов на поверхность с помощью стандартного механизма связи для управления бурением скважины. Альтернативно, электронная аппаратура может содержать интерфейс связи для передачи сигналов, принятых измерительным скважинным прибором 3205 на поверхность с помощью стандартного механизма связи для управления бурением скважины, причем анализ этих принятых сигналов может выполняться блоком обработки на поверхности.
В некоторых вариантах осуществления измерительный скважинный прибор 3205 может быть заключен в корпус 3270 скважинного прибора, присоединенный к каротажному кабелю 3274, такому, который служит для применений с использованием каната для работы со скважинными приборами. Корпус 3270 скважинного прибора, содержащий измерительный скважинный прибор 3205, может включать в себя электронную аппаратуру для активации передающего датчика измерительного скважинного прибора 3205 и получения откликов от выбранных принимающих датчиков измерительного скважинного прибора 3205. Такая электронная аппаратура может содержать блок обработки для анализа сигналов, полученных измерительным скважинным прибором 3205, и передачи обработанных результатов на поверхность с помощью стандартного механизма связи для управления бурением скважины. Альтернативно, электронная аппаратура может содержать интерфейс связи для передачи сигналов, полученных измерительным скважинным прибором 3205, на поверхность с помощью стандартного механизма связи для управления бурением скважины, причем анализ этих полученных сигналов может выполняться блоком обработки на поверхности. Каротажный кабель 3274 может быть реализован в виде каната для работы со скважинными приборами (несколько линий питания и связи), монокабеля (единственный проводник) и/или стального троса малого диаметра (без проводников для питания или связи), или другой подходящей конструкции для использования в стволе скважины 3212.
Во время операций бурения бурильная колонна 3208 может вращаться роторным столом 3207. В дополнение к этому или альтернативно, компоновка 3220 низа бурильной колонны также может вращаться двигателем (например, забойным двигателем), расположенным в стволе скважины. Для увеличения веса бурового долота 3226 могут использоваться утяжеленные бурильные трубы 3215. Утяжеленные бурильные трубы 3215 могут также повышать жесткость компоновки 3220 низа бурильной колонны, позволяя компоновке 3220 низа бурильной колонны передавать дополнительный вес буровому долоту 3226, и, в свою очередь, помогая буровому долоту 3226 проходить через поверхность 3204 и подземные пласты 3214.
Во время операций бурения буровой насос 3232 может перекачивать промывочную жидкость (иногда известную специалистам как «буровой раствор») из приемной емкости 3234 для бурового раствора через шланг 3236 в бурильную трубу 3218 и вниз к буровому долоту 3226. Промывочная жидкость может вытекать из бурового долота 3226 и возвращаться к поверхности 3204 через затрубную зону 3240 между бурильной трубой 3218 и боковыми сторонами ствола скважины 3212. После этого промывочная жидкость может возвращаться к приемной емкости 3234 для бурового раствора, где такая жидкость фильтруется. В некоторых вариантах осуществления промывочная жидкость может использоваться для охлаждения бурового долота 3226, а также для обеспечения смазки бурового долота 3226 во время операций бурения. Кроме того, промывочная жидкость может использоваться для удаления из подземного пласта 3214 бурового шлама, образовавшегося в результате работы бурового долота 3226.
Могут быть реализованы и другие варианты осуществления настоящего изобретения. Например, некоторые варианты осуществления содержат устройство и системы, преобразующие нижнюю часть КНБК (ВНА) в антенну, используя тороид или непроводящий зазор для формирования датчика УСУД (ABR). Этот тороидальный или созданный на базе зазора датчик УСУД (ABR) комбинируется с глубинным измерением при помощи электромагнитной антенной решетки для обеспечения уточненного измерения удельного сопротивления.
Хотя эти тороидальный и созданный на базе зазора варианты осуществления УСУД (ABR) механически легче выполнить и разместить, чем рамки (катушки), комбинация рамки УСУД (ABR) или датчика на базе зазора и рамок (катушек) для глубинного измерения не является эффективной, поскольку работа датчика УСУД (ABR) основана на принципах проводимости (при этом отсутствует отчетливо выраженный геометрический фактор), тогда как работа датчиков для глубинных измерений основана на электромагнитной индукции. Таким образом, следует отметить, что при традиционных операциях измерения удельного сопротивления используется индукция или проводимость, но не то и другое вместе. Поэтому специалист в данной области техники не заинтересован в том, чтобы смешивать различные типы измерений, так как это ведет к повышению расходов при использовании различных электрических компонентов, отдельных алгоритмов обработки и т.д.
В контексте настоящего документа ссылки на «рамочную» антенну означают антенну, которая может работать как эквивалент магнитного диполя. Рамочная антенна может быть выполнена путем наматывания провода для формирования по меньшей мере одного витка на окружности, так, чтобы центр рамки (ее азимутальная ось) следовал прямолинейной траектории. Ссылки на «тороидальную» антенну означают антенну, которая может работать как эквивалент электрического диполя.
Тороидальная антенна может быть выполнена путем наматывания провода для образования нескольких рамок, центр которых следует по замкнутой круговой траектории. В качестве примера, тороид может быть выполнен путем формирования последовательности рамок вокруг кольцеобразного тела, такого как тор.
Датчик УСУД (ABR) в этих вариантах осуществления принципиально отличается от других датчиков, которые могут быть размещены на долоте. Использование тороида или зазора для реализации датчика УСУД (ABR) вместо простой рамки позволяет осуществлять фокусировку в более дальней зоне впереди долота при использовании в сочетании с датчиками для глубинных измерений. Например, в некоторых случаях глубину измерения можно удвоить.
Обработка для датчика УСУД (ABR) в качестве компонента этой новой комбинации также будет иной, поскольку удельное сопротивление для тороидального датчика вычисляется по-другому. Как подробнее обсуждается ниже (см. способ 3711 на ФИГ. 37), использование датчика УСУД (ABR) на основе тороида или зазора позволяет применять очень эффективный механизм инверсии - недоступный при использовании датчика УСУД (ABR) на базе рамки. Это объясняется тем, что обработка данных измерения с помощью тороида с целью определения кажущегося удельного сопротивления может выполняться путем умножения измеренного сигнала тороида на постоянную скважинного прибора. Напротив, в большинстве способов обработки с использованием рамки применяют справочную таблицу.
На фиг. 33 изображено устройство 3300, выполненное с возможностью проведения совместных измерений удельного сопротивления в районе долота и глубинных измерений согласно различным вариантам осуществления настоящего изобретения. В некоторых вариантах осуществления устройство 3300 содержит скважинный прибор. Во многих вариантах осуществления устройство 3300 содержит одну или несколько электромагнитных антенных решеток 3308 для глубинных измерений, один или несколько датчиков УСУД (ABR) 3316 и буровое долото 3326.
Вследствие геометрически и экспоненциально уменьшающейся чувствительности с увеличением расстояния от прибора почти все скважинные приборы более чувствительны к свойствам пласта в ближней зоне, чем в дальней. Кроме того, электрические сигналы, характеризующие свойства пласта в ближней и дальней зонах, обычно смешиваются нетривиальным образом, причем эта проблема решается за счет использования нескольких положений датчиков и рабочих частот.
Таким образом, устройство 3300 объединяет измерения при помощи датчика УСУД (ABR) 3316 с использованием сигналов 3318 от пласта вблизи от долота 3326 с измерениями с большим радиусом сигналов 3320 от пласта, обеспечиваемых электромагнитной антенной решеткой 3308 для глубинных измерений, с целью повышения разрешения информации, которая может быть получена из зоны впереди бурового долота 3326. Из подграфика на фиг. 33 видно, что датчик УСУД (ABR) 3316 может с относительно высоким разрешением выполнять измерения профиля пласта в нижнем направлении до места расположения долота и, при идеальных условиях, даже на 1-2 метра впереди долота, тогда как антенная решетка 3308 для глубинных измерений ниже проникает в пласт 3314. Поскольку измерения УСУД (ABR) сигналов 3318 от пласта выделяют границы 3322 слоев пласта вплоть до места расположения долота, объем неизвестных величин, подлежащих глубинному измерению с помощью решетки 3308, значительно сокращается. При этом возрастают как глубина обнаружения, так и надежность измерений.
В этом случае устройство 3300 в виде скважинного прибора содержит комбинацию двух систем: датчик УСУД (ABR) 3316 и антенную решетку 3308 для глубинных измерений. Решетка 3308 для глубинных измерений может содержать набор передатчиков и набор приемников, которые могут размещаться в канавках в узле скважинного прибора, возможно, будучи реализованными в виде магнитных диполей с использованием рамочных антенн, наклонных рамочных антенн или соленоидов. Для управления передающими антеннами в решетке 3308 и датчиком УСУД (ABR) 3316 могут генерироваться импульсные или стационарные сигналы. Результирующие сигналы могут взаимодействовать с пластом 3314 и границами 3322 слоя в непосредственной близости от устройства 3300 для получения сигналов 3318, 3320 от пласта, считываемых приемниками в антенной решетке 3308 и датчиком УСУД (ABR) 3316.
На фиг. 34 изображена структурная схема системы 3400 получения результатов измерений удельного сопротивления у долота и глубинных измерений удельного сопротивления согласно различным вариантам осуществления настоящего изобретения. Системный контроллер 3420 управляет передатчиками 1212-1…1212-N1 для передающих антенн 1210-Т решетки 3308 глубинного измерения. Контроллер 3420 управляет также передатчиками УСУД (ABR) в датчике УСУД (ABR) 3316. После взаимодействия сигналов с пластом контроллер 3420 собирает и записывает данные о сигналах от пласта в буфер 1224, в некоторых случаях применяя предварительную обработку, а затем передает сигналы на поверхность для обработки при помощи инверсии. В некоторых вариантах осуществления обработки при помощи инверсии обработка и интерпретация выполняются блоком 1226 обработки данных в стволе скважины, а результаты обработки передаются на поверхность при помощи блока 1228 связи (например, приемопередатчика). Решения в отношении начала, остановки и направления бурения также могут приниматься в скважине контроллером 3420, что улучшает время реакции и увеличивает ширину полосы частот данных телеметрии для других приборов, которые могут помещаться в КНБК (ВНА).
На фиг. 35A-35D изображены различные варианты осуществления датчика УСУД (ABR) 3500, 3502, 3504 и дополнительного измерительного датчика 3506 согласно различным вариантам осуществления настоящего изобретения. На фиг. 35А показан вариант реализации на основе тороида, на фиг. 35В - вариант реализации с использованием зазора, на фиг. 35С - вариант реализации с фокусировкой с двумя зазорами, и на фиг. 35D - индукционный вариант реализации (используемый в дополнение к измерениям УСУД (ABR), выполняемым при помощи основных датчиков УСУД (ABR), показанных на фиг. 35А, 35В, 35С). Каждый вариант реализации содержит долото 3526.
На фиг. 35А показаны два тороида 3530. Тороидальный передатчик Тх и тороидальный приемник Rx работают на относительно высокой частоте (500-50 кГц). Тороидальный передатчик Тх может быть смонтирован рядом с долотом 3526, на долоте 3526 или сформирован внутри долота 3526.
На фиг. 35В непроводящий зазор G1 используется для электрической сепарации верхней и нижней частей КНБК (ВНА). Когда ток I1 инжектируется и проходит между верхней и нижней частями КНБК (ВНА), токи протекают через промывочную жидкость и пласт (например, пласты 3214 или 3314). Напряжение, возникающее на зазоре G1, указывает на местное удельное сопротивление пласта.
На фиг. 35С используются два зазора G1, G2, определяющих три различных электрических зоны: выше, ниже и между зазорами G1, G2. Токи l1, l2 инжектируют таким образом, чтобы уменьшить до нуля разность напряжений между двумя измерительными электродами М2, помещенными сверху на нижний переводник. Этот «фокусирующий» подход может быть реализован при помощи программного или аппаратного обеспечения. Окончательный результат основан на напряжении между нижним измерительным электродом М1 и самой верхней частью КНБК (ВНА). Следует отметить, что можно также использовать комбинацию устройства на основе тороида и зазора (т.е. комбинацию фиг. 35А и фиг. 35В или фиг. 35С).
На фиг. 35D дополнительный измерительный датчик 3506, изготовленный из рамок (катушек), может использоваться для выполнения измерения индукционного типа. В связи с пространственными ограничениями вблизи от долота это измерение может быть малоглубинным и неазимутальным. В этом случае излучающая и приемная рамки Coil-Trx, Coil-Rcv соответственно разделены расстоянием приблизительно от 5 см до 60 см, при этом излучающая рамка Coil-Trx расположена как можно ближе к долоту 3526 или размещена на самом долоте 3526.
На фиг. 36 показана блок-схема первого способа 3611 обработки сигнала от пласта согласно различным вариантам осуществления настоящего изобретения. Это обработка, применяемая к данным о сигнале от пласта после того, как он получен.
Сначала выполняют измерение УСУД (ABR) и глубинное измерение, и данные о сигнале от этого пласта подвергаются предварительной обработке. Предварительная обработка, выполняемая до инверсии, может включать в себя фильтрацию, фокусировку, преобразование к удельному сопротивлению при помощи справочной таблицы, умножение на постоянную скважинного прибора, многоглубинный синтез сигналов антенной решетки, бинирование, восстановление нескольких компонентов по вращению скважинного прибора и азимутальное удаление до заданного угла простирания.
После этого значения предварительно обработанных сигналов от пласта инвертируют для получения параметров пласта как в зоне вокруг долота, так и впереди долота, с целью определения электрических и геологических свойств пласта. Помимо прочего, эти свойства включают в себя удельные сопротивления слоев, расстояния и направления к слоям. В ходе инверсии разность между моделируемым сигналом (например, моделируемым напряжением) и измеренным сигналом (например, измеренным напряжением) сводится к минимуму для того, чтобы попытаться привести измеренный сигнал в соответствии с моделируемым. Библиотека баз данных используется, чтобы обеспечить входные данные для процесса численной инверсии, позволяющего получить усовершенствованное измерение удельного сопротивления при помощи измерения сигналов от пласта как комбинации измерения УСУД (ABR), и глубинного измерения.
Наконец, на основе имеющейся информации могут быть приняты решения о бурении. В случае спуска обсадной колонны пробуренная скважина приближается к пласту-коллектору сверху, при этом границу пласта обнаруживают заблаговременно, что позволяет направлять ствол скважины в пласт без выхода за установленные пределы. В случае размещения скважины пробуренная скважина удерживается внутри пласта-коллектора в оптимальном положении, предпочтительно ближе к вершине пласта для максимального увеличения добычи. В случае геостопинга бурение скважины останавливают, прежде чем она пройдет через возможную опасную зону. Различные варианты осуществления особенно полезны в применениях, связанных с геостопингом, поскольку при этом максимально увеличивается глубина исследования для вертикального бурения.
На фиг. 37 показана блок-схема второго способа 3711 обработки сигнала от пласта согласно различным вариантам осуществления настоящего изобретения. В способе 3711 предлагается более эффективный механизм обеспечения усовершенствованного измерения удельного сопротивления путем разделения задачи на две части, решаемые последовательно.
Сначала значения полезных сигналов от пласта УСУД (ABR) инвертируют для определения параметров пласта на всю глубину вплоть до долота. Поскольку датчик УСУД (ABR) имеет относительно высокое разрешение по сравнению с антенной системой для глубинных измерений, первая инверсия 3713 обеспечивает относительно точное представление свойств пласта, включая границы слоев, вплоть до местоположения долота. В связи с применением итеративного подхода нет необходимости использовать библиотеку баз данных для определения промежуточного значения удельной проводимости 3717 по измерениям УСУД (ABR).
После этого, используя априорную информацию о слое пласта, предоставляемую первой инверсией 3713, и промежуточное значение удельной проводимости 3717, слои, расположенные впереди долота, обрабатывают при помощи второй инверсии 3715 для определения уточненного значения удельной проводимости 3719.
Полезно реализовать поправку на влияние скважины для измерений с помощью датчика УСУД (ABR) в качестве составной части способа 3711. Например, сигналы от пласта, полученные с помощью датчика УСУД (ABR), могут быть дополнены другими малоглубинными датчиками на КНБК (ВНА) (например, см. датчик 3506 на фиг. 35D), или датчиками, обеспечивающими информацию о строении или характерном падении пласта.
На фиг. 38 показан синтетический график 3810 показаний прибора, измеряющего удельное сопротивление пласта, согласно различным вариантам осуществления настоящего изобретения. Здесь приведены результаты скважинных исследований для датчика УСУД (ABR) 3316 и антенной решетки 3308 для глубинного измерения, полученные при помощи скважинного прибора, как показано на вложенном чертеже на фиг. 38. Для управления антенной решеткой для глубинного измерения была использована возбуждающая частота 5 кГц.
На графике 3810 результаты измерения УСУД (ABR) (сплошная линия) показаны после инвертирования с использованием способа инверсии границы одного слоя. Результаты глубинного измерения (пунктирная линия) были получены с использованием алгоритма нульмерной инверсии на основе абсолютной фазы измеренного сигнала. Принятую модель слоя пласта можно наблюдать по результатам УСУД (ABR) с высоким разрешением, где удельное сопротивление изменяется в диапазоне от 12 до 30 Ом·м. Целью является слой пласта с удельным сопротивлением 1 Ом·м, расположенный на глубине >1000 футов. Падение 0° было использовано для всех слоев в целях моделирования сценария вертикального бурения.
На фиг. 39А и 39В показаны графики 3910, 3920 результатов инверсии при использовании традиционных измерений удельного сопротивления и результаты измерений согласно различным вариантам осуществления настоящего изобретения соответственно.
На фиг. 39А показаны результаты традиционного измерения удельного сопротивления 3910 без использования датчика УСУД (ARB); малоглубинное измерение выполняется на расстоянии 25 футов позади передатчика в скважинном приборе 3914. Это расстояние было выбрано, поскольку располагать датчик удельного сопротивления в ближней зоне пласта под буровым двигателем неудобно (из-за ограничений на длину, при этом датчик, помещенный над буровым двигателем, находился бы на расстоянии по меньшей мере 25 футов от передатчика). Благодаря использованию этой традиционной системы была получена глубина исследования 3912, составляющая приблизительно 22 фута.
На фиг. 39В измерения 3920 удельного сопротивления получены с использованием одного из вариантов осуществления, раскрытых в настоящей заявке, такого как скважинный прибор 3924. В этом случае результат малоглубинного измерения с помощью датчика УСУД (ARB) сначала инвертируют для получения априорной информации, предоставляющей для второй инверсии данные по единственному слою ниже долота. Как видно из фиг. 39В, глубина исследования 3922 была увеличена приблизительно до 37 футов.
Следует отметить, что, хотя в этом примере показана система, основанная на абсолютных измерениях напряжения, измерение отношений между коллективно используемыми приемниками или передатчиками (например, приемник можно использовать для сравнения сигналов от двух различных передатчиков, или передатчиком можно управлять, направляя сигналы двум различным приемниками), также можно применять для выполнения сравнения. Этого можно добиться, разместив два приемника, разделенные в осевом направлении, сверху на КНБК (ВНА). В этом случае инверсия также основана на амплитуде и фазе сложного отношения. Результатом является дифференциальное измерение, которое можно использовать для устранения неопределенности фазы и подавления шума (бурения).
На фиг. 40 показана структурная схема устройства 4000 и системы 4046 согласно различным вариантам осуществления настоящего изобретения. Устройство 4000 может содержать ряд компонентов, включая раскрытые в предыдущих параграфах, а также любые компоненты устройства, показанного на фиг. 33-35. Например, система 4046 может содержать наземную рабочую станцию 4056 и одно или несколько устройств 4000. Устройство 4000, в свою очередь, может содержать корпус 4004, датчики (например, в числе прочих, электромагнитную антенную решетку 4008 для глубинных измерений и датчик УСУД (ABR) 4016) и один или несколько процессоров 4030. Во многих вариантах осуществления корпус 4004 содержит прибор ИПБ (MWD) или прибор КВБ (LWD). Таким образом, устройством 4000 можно заменить устройство 3205 на фиг. 32.
В контексте настоящего документа «электромагнитная антенная решетка» содержит антенные элементы, включая, по меньшей мере, одну передающую антенну Xmtr и по меньшей мере одну приемную антенну Rcvr. «Электромагнитная антенная решетка для глубинных измерений» 4008 представляет собой решетку, способную выполнять измерения удельного сопротивления пласта и местоположений слоев впереди долота 4026 (т.е. слоев, которые еще локально не пройдены долотом) в пласте 4014 на расстоянии, по меньшей мере в два раза превышающем то, для которого измерения удельного сопротивления пласта могут производиться датчиком УСУД (ABR) 4016. Процессоры 4030 можно использовать для получения сигналов 4070 от пласта, принятых датчиками, и вычисления уточненного результата измерения удельного сопротивления.
Таким образом, в некоторых вариантах осуществления система 4046 содержит корпус 4004, электромагнитную антенную решетку 4008 для глубинных измерений, присоединенную к корпусу 4004, и датчик УСУД (ABR) 4016, присоединенный к корпусу. Электромагнитная антенная решетка 4008 для глубинных измерений содержит несколько элементов, включая по меньшей мере одну передающую антенну Xmtr и одну приемную антенну Rcvr, присоединенные к корпусу 4004. Датчик УСУД (ABR) 4016 содержит буровое долото 4026, электрически соединенное с тороидом Тх или с несколькими электродами (показанными на рисунке в виде больших точек), причем электроды разделены по меньшей мере одним зазором (см. фиг. 35В, 35С).
Устройство 4000 содержит по меньшей мере один процессор 4030 для получения сигналов 4070 от пласта от электромагнитной антенной решетки 4008 для глубинных измерений и датчика УСУД (ABR) 4016, где значения сигналов 4070 от пласта зависят от свойств геологического пласта 4014. Процессоры 4030 могут быть выполнены с возможностью инвертирования значения сигналов 4070 от пласта в целях преобразования этих значений в уточненный результат измерения удельного сопротивления для геологического пласта 4014. Операция инвертирования может содержать определение по меньшей мере одного относительного расстояния между слоями геологического пласта, ориентации пластов относительно корпуса 4004 или градиента удельного сопротивления слоев, причем эти слои локально не пройдены долотом 4026.
Процессор (процессоры) 4030 образует (образуют) часть устройства 4000, при этом система 4046 может быть присоединена к корпусу 4004 или размещена в рабочей станции 4056 на поверхности 4066 геологического пласта 4014, либо могут использоваться оба этих варианта. Таким образом, задачи обработки сигналов от пласта в системе 4046 могут быть разделены между двумя или несколькими процессорами 4030, включая наземную компьютерную рабочую станцию 4056 и подземный процессор 4030, соединенный с рабочей станцией 4056 с возможностью обмена данными.
Электромагнитная антенная решетка 4008 для глубинных измерений может содержать несколько передающих антенн Xmtrs и приемных антенн Rcvrs. Одна из антенн может располагаться ниже бурового двигателя MOTOR, между буровым двигателем MOTOR и буровых долотом 4026, при этом одна из антенн может быть расположена выше бурового двигателя MOTOR, дальше от бурового долота 4026. Таким образом, антенные элементы в решетке 4008 могут располагаться с каждой стороны от бурового двигателя MOTOR, при этом один или несколько элементов расположены рядом с долотом 4026, или установлены на или в самом долоте 4026. Так, в некоторых вариантах осуществления один из элементов электромагнитной антенной решетки 4008 для глубинных измерений расположен с одной стороны от бурового двигателя MOTOR, а другой из элементов электромагнитной антенной решетки 4008 для глубинных измерений расположен с другой стороны от бурового двигателя MOTOR. Иными словами, буровой двигатель MOTOR расположен между двумя элементами электромагнитной антенной решетки 4008 для глубинных измерений.
Электромагнитная приемная антенная решетка (например, приемные антенны Rcvrs) может содержать различные физические устройства, в том числе «соленоид», представляющий собой катушку, высота которой по меньшей мере в два раза превышает ее диаметр. Таким образом, электромагнитная приемная антенная решетка может содержать по меньшей мере одну рамку, наклонную рамочную антенну или соленоид.
Как отмечалось выше, зазоры датчика УСУД (ABR) могут быть образованы, чтобы уменьшить или в значительной мере свести на нет разность напряжений между контрольными электродами. Таким образом, обращаясь теперь к фиг. 35С и фиг. 40, можно видеть, что напряжение между контрольными электродами М1, М2 можно уменьшить, регулируя напряжения токовых электродов (проводящих частей бурильной колонны, не включающих контрольные электроды М1, М2). Эта процедура известна специалистам в данной области под названием «фокусировки». Она может быть выполнена с использованием аппаратного обеспечения (путем физического регулирования токов в токовых электродах при помощи контура обратной связи) или программного обеспечения (когда собирают несколько измерений без фокусировки тока, а затем суммируют с весовыми коэффициентами, уменьшающими разность напряжений на электродах при измерении до нуля). Таким образом, в некоторых вариантах осуществления зазоры датчика УСУД (ABR) 4016 могут быть выполнены с возможностью уменьшения разности напряжений между контрольными электродами.
Устройство 4000 может содержать логический узел 4040 для получения и записи сигналов 4070 от пласта в запоминающее устройство 4050, возможно, как части базы данных 4034, содержащей инвертированные результаты измерений, выполненных антенной решеткой 4008 и датчиком УСУД (ABR) 4016. Значения сигналов 4070, как и результаты инверсии, могут быть опубликованы путем размещения на одном из носителей информации (например, в памяти 4050), распечатки в виде твердой копии или вывода на дисплей (например, дисплей рабочей станции 4056). Логический узел 4040 может содержать часть скважинной системы 4024 сбора данных.
Для передачи значений сигналов 4070 на поверхность 4066 может использоваться телеметрия, независимо от того, применяется ли предварительная обработка. Таким образом, устройство 4000 может содержать телеметрический передатчик (например, как часть приемопередатчика 4044) для передачи сигналов 4070, значений, получаемых на основе сигналов 4070, а также результатов инверсии на рабочую станцию 4056, находящуюся на поверхности 4066.
В некоторых вариантах осуществления устройство 4000 содержит изделие, включая специальную машину, согласно различным вариантам осуществления настоящего изобретения. Например, прочтя и разобравшись в содержании раскрытого изобретения, средний специалист в данной области техники поймет способ, с помощью которого компьютерная программа может быть запущена с машиночитаемого носителя (например, запоминающего устройства 4050, которое может находиться в скважине, на рабочей станции 4056, или размещаться с использованием обоих вариантов) в компьютерной системе для выполнения функций, определяемых в программе при помощи набора команд.
Специалисту в данной области техники будут понятны также различные программные языки, которые могут применяться для создания одной или нескольких компьютерных программ, предназначенных для реализации и выполнения способов, раскрытых в настоящей заявке. Программы могут быть структурированы в объектно-ориентированном формате с помощью объектно-ориентированного языка, такого как Java или С++. В некоторых вариантах осуществления программы могут быть структурированы в процедурно-ориентированном формате с использованием процедурно-ориентированного языка, такого как ассемблер или С. Компоненты программы могут сообщаться с использованием любого из ряда механизмов, хорошо известных специалистам, таких как интерфейсы прикладной программы или техника взаимодействия процессов, в том числе дистанционное обращение к процедуре. Идеи различных вариантов осуществления не ограничены использованием какого-либо определенного языка или среды программирования. Таким образом, могут быть реализованы и другие варианты осуществления.
Например, изделие, такое как компьютер, система памяти, магнитный или оптический диск, некоторые другие устройства хранения данных и/или любой тип электронного устройства или системы, может содержать один или несколько процессоров 4030, подключенных к машиночитаемому носителю 4050, такому как запоминающее устройство (например, сменные накопители, а также любое устройство памяти, в том числе электрическое, оптическое или электромагнитное проводящее тело, содержащее материальные носители), предназначенное для хранения команд (например, команд компьютерной программы), которые, при их исполнении одним или несколькими процессорами 4030, приводят к выполнению любых действий, описанных в связи со способами, раскрытыми в настоящем документе.
Машина может представлять собой специальную компьютерную систему, имеющую процессор 4030, непосредственно соединенный с некоторыми компонентами (например, логическим узлом 4040, приемопередатчиком 4044 и/или антенной решеткой 4008 и датчиком УСУД (ABR) 4016, возможно, при помощи шины или какого-то другого канала связи, проводного или беспроводного). Таким образом, машина может быть аналогична или идентична рабочей станции 4056 или устройству 4000 в некоторых вариантах осуществления. В этом случае некоторые варианты осуществления содержат машиночитаемое устройство хранения данных (например, запоминающее устройство 4050), предназначенное для хранения команд, которые, при их исполнении машиной, инициируют выполнение машиной операций, содержащих любые способы, раскрытые в настоящем документе. Ниже будут представлены дополнительные примеры этих способов.
На фиг. 41 показана блок-схема, иллюстрирующая несколько способов 4111 согласно различным вариантам осуществления настоящего изобретения. Например, реализуемый на базе одного или нескольких процессоров способ 4111, где процессоры выполняют способы, которые могут содержать получение сигналов глубинного измерения и сигналов УСУД (ABR) и обработку этих сигналов при помощи инверсии (например, двухступенчатой инверсии) для обеспечения измерения с улучшенной чувствительностью.
Управление передающей антенной решеткой может осуществляться импульсными или стационарными сигналами с целью возбуждения приемников в антенной решетке для глубинных измерений. Таким образом, в некоторых вариантах осуществления способ 4111 может начинаться в блоке 4121 с возбуждения одной или нескольких передающих антенн импульсным или стационарным сигналом передачи для получения полезных сигналов от геологического пласта.
Выполнение способа 4111 может продолжаться в блоке 4125 путем получения сигналов от пласта, полученных электромагнитной антенной решеткой для глубинных измерений и датчиком УСУД (ABR), при этом значения сигналов от пласта зависят от свойств геологического пласта. Электромагнитная антенная решетка для глубинных измерений может содержать несколько элементов, в том числе, по меньшей мере одну передающую антенну и одну приемную антенну. Датчик УСУД (ABR) может содержать буровое долото, электрически соединенное с тороидом или с несколькими электродами, разделенными одним или несколькими зазорами.
Электромагнитная антенная решетка для глубинных измерений может быть выполнена с возможностью обеспечения дифференциального измерения, устраняющего неопределенность фазы и подавляющего шум бурения. Таким образом, действие, выполняемое в блоке 4125, может содержать получение сигналов от пласта с помощью коллективно используемых передающих или приемных элементов антенной решетки для глубинных измерений с целью формирования сложного амплитудного коэффициента измеренной амплитуды и фазы или разности фаз.
Антенная решетка для глубинных измерений может быть рассчитана на определение удельного сопротивления пласта на расстоянии, по меньшей мере в четыре раза превышающем расстояние, измеряемое датчиком УСУД (ABR), при той же степени точности. Таким образом, в некоторых вариантах осуществления антенная решетка для глубинных измерений позволяет выполнять измерения удельного сопротивления пласта и местоположения слоев впереди долота на расстоянии, по меньшей мере в четыре раза превышающем расстояние, на котором датчик УСУД (ABR) может выполнять измерения удельного сопротивления пласта.
Датчик УСУД (ABR) может содержать дополнительные элементы (например, см. фиг. 35D), используемые для выполнения индукционных измерений в дополнение к измерениям, выполняемым с помощью тороида или электродов. Таким образом, в некоторых вариантах осуществления датчик УСУД (ABR) используется для получения некоторых сигналов от пласта путем выполнения индукционных неазимутальных измерений.
Затем способ 4111 может перейти к блоку 4129, чтобы определить, завершено ли получение сигналов от пласта. Если нет, способ 4111 может вернуться к блоку 4125 для продолжения получения сигналов. Если да, способ 4111 может перейти к блоку 4133.
Сигналы датчика УСУД (ABR) могут корректироваться за влияние скважины, так как удельная проводимость ствола скважины может изменять результаты измерения удельного сопротивления. Таким образом, в некоторых вариантах осуществления способ 4111 содержит (в блоке 4133) корректировку значений сигналов от пласта, обеспечиваемых датчиком УСУД (ABR), за влияние скважины.
Другие малоглубинные датчики, такие как близко расположенные пары передатчик-приемник, могут использоваться для коррекции значений сигналов датчика УСУД (ABR). Так, действие по корректировке в блоке 4133 может включать в себя использование сигналов, обеспечиваемых индукционным датчиком, содержащим передающую антенну датчика и приемную антенну датчика, выполненные с возможностью измерения местного удельного сопротивления непосредственно перед буровым долотом.
Сигналы от пласта, полученные антенной решеткой и датчиком УСУД (ABR), могут обрабатываться рядом различных способов до инвертирования их соответствующих значений. Например, способ 4111 может содержать (в блоке 4137) предварительную обработку сигналов от пласта до инверсии путем применения по меньшей мере одной из таких операций, как фильтрация, фокусировка для увеличения разрешения, преобразование измеренных значений удельного сопротивления при помощи справочной таблицы, умножение на постоянную скважинного прибора, многоглубинный синтез сигналов антенной решетки, бинирование, восстановление нескольких компонентов по вращению скважинного прибора или азимутальное удаление до заданного угла простирания.
Способ 4111 может перейти к блоку 4141, чтобы выполнить инвертирование значений сигналов от пласта в целях преобразования этих значений в уточненный результат измерения удельного сопротивления для геологического пласта, где инвертирование может содержать определение по меньшей мере одного относительного расстояния между слоями геологического пласта, ориентации пластов относительно корпуса или градиента удельного сопротивления слоев, причем эти слои локально не пройдены долотом.
Инверсия может применяться для определения электрических и геологических свойств пласта. Так, действие, выполняемое в блоке 4141, может содержать инвертирование значений сигналов от пласта с целью преобразования этих значений в результаты измерения параметров пласта, содержащие электрические или геологические свойства. Электрические или геологические свойства могут включать в себя одно или несколько из таких свойств, как удельные сопротивления слоев, расстояния до слоев и направления к слоям.
Инверсия может выполняться как часть последовательного процесса (например, как показано на фиг. 37), с использованием первой инверсии значений, полученных от одного датчика, в качестве основы для второй инверсии значений, полученных от другого датчика. Таким образом, действие по инвертированию в блоке 4141 может содержать последовательный процесс, включающий в себя инвертирование значений сигналов от пласта, обеспечиваемых датчиком УСУД (ABR), служащее основой для инвертирования значений сигналов от пласта, обеспечиваемых антенной решеткой для глубинных измерений.
На каждом этапе может применяться много процессов инверсии. Например, для инвертирования значений сигналов датчика УСУД (ABR) можно использовать инверсию границы одного слоя. Так, действие по инвертированию в блоке 4141 может содержать инвертирование значений сигналов от пласта, обеспечиваемых датчиком УСУД (ABR) с инверсией границы одного слоя. В другом примере инвертирование значений сигналов от пласта, обеспечиваемых антенной решеткой для глубинных измерений, может быть основано на абсолютных значениях фазы. Так, действие по инвертированию в блоке 4141 может содержать инвертирование значений сигналов от пласта, обеспечиваемых антенной решеткой для глубинных измерений, на основе абсолютных значений фазы сигналов от пласта, обеспечиваемых антенной решеткой для глубинных измерений.
В двухэтапном процессе, изображенном на фиг. 37, инвертирование значений сигналов УСУД (ABR) может обеспечить промежуточное значение удельного сопротивления, которое уточняется благодаря использованию промежуточного значения удельного сопротивления в качестве входных данных для инверсии значений сигналов антенной решетки для глубинных измерений. Так, действие по инвертированию в блоке 4141 может содержать инвертирование значений сигналов от пласта, обеспечиваемых тороидом в датчике УСУД (ABR), для получения промежуточного значения удельного сопротивления, преобразуемого в уточненное значение удельного сопротивления путем инверсии значений сигналов от пласта, обеспечиваемых антенной решеткой для глубинных измерений.
Во многих вариантах осуществления способ 4111 переходит к блоку 4145 для публикации, помимо прочих параметров, значений сигналов от пластов, промежуточных значений удельного сопротивления или уточненных значений удельного сопротивления, включая сохранение на одном или нескольких носителях информации, распечатку в виде твердой копии или вывод на дисплей. Примерами значений, которые могут быть опубликованы в блоке 4145, являются любые результаты инверсии, показанные на фиг. 36 и фиг. 37.
Дополнительные действия, образующие часть способов 4111, перечислены среди действий для заявленных ниже способов и раскрыты выше со ссылкой на фиг. 2, фиг. 13-18 и фиг. 36-37. Таким образом, следует отметить, что раскрытые здесь способы необязательно выполнять в описанном порядке, или в каком-либо специальном порядке. Кроме того, различные действия, раскрытые в связи со способами, выявленными в настоящей заявке, могут выполняться итеративно, последовательно или параллельно. Некоторые действия могут быть добавлены, а некоторые из включенных действий - опущены. Некоторые действия могут быть заменены, одно на другое. Информацию, включая параметры, команды, операнды и другие данные, можно передавать и принимать в виде одной или нескольких несущих волн.
В заключение можно отметить, что, используя устройство, системы и способы, раскрытые в настоящей заявке, специалисты, работающие в нефтедобывающей отрасли и других отраслях, смогут теперь точнее и быстрее оценивать свойства стволов скважин и геологических пластов, в том числе, на значительных расстояниях впереди долота. Объединяя датчики с большим радиусом исследования и датчик УСУД (ABR), можно определить данные об удельном сопротивлении для слоев, расположенных на всю глубину вплоть до долота и за его пределами. В некоторых случаях глубина исследования может быть почти удвоена. Таким образом, варианты использования геостопинга могут быть более эффективными, результатом чего станут возросший коэффициент эксплуатации скважины и рост удовлетворенности клиентов.
На приложенных чертежах, образующих часть настоящей заявки, показаны в качестве иллюстрации, но не ограничения, конкретные варианты осуществления, в виде которых предмет настоящего изобретения может быть реализован на практике. Изображенные варианты осуществления раскрыты достаточно подробно, что позволяет специалистам реализовать на практике раскрытые здесь принципы настоящего изобретения. Другие варианты осуществления могут быть реализованы или получены на их основе таким образом, чтобы конструктивные и логические варианты замены и изменения могли быть сделаны без выхода за рамки раскрытия настоящего изобретения. Поэтому настоящее подробное описание не следует воспринимать в ограничивающем смысле, при этом объем различных вариантов определяется только приложенной формулой изобретения, наряду с полной серией эквивалентов, право на которые имеет такая формула.
Такие варианты осуществления объекта изобретения могут называться в настоящем документе, по отдельности и/или совместно, термином «изобретение» просто для удобства и без намерения умышленно ограничить объем его применения единственным изобретением или изобретательским замыслом, если фактически раскрыто более одного варианта. Таким образом, хотя в настоящей заявке изображены и описаны конкретные варианты осуществления, следует понимать, что любая конструкция, рассчитанная для достижения той же цели, может быть использована вместо показанных конкретных вариантов. Настоящее описание изобретения предназначено для того, чтобы охватить любые возможные адаптации или изменения различных вариантов осуществления. Комбинации представленных выше вариантов осуществления и другие варианты осуществления, не раскрытые специально в настоящей заявке, будут понятны специалисту в данной области техники после изучения приведенного выше описания.
Реферат представлен в соответствии с правилом 37 C.F.R., §1.72(b), требующим наличия реферата, позволяющего читателю быстро определить характер технической сущности изобретения. Он представлен, исходя из предположения, что не будет использоваться в целях интерпретации или ограничения объема или смысла формулы изобретения. Кроме того, из приведенного выше подробного описания видно, что различные признаки группируются в едином варианте осуществления в целях упрощения раскрытия сущности изобретения. Данный способ раскрытия сущности изобретения не следует интерпретировать как отражающий намерение придать заявляемым вариантам осуществления больше признаков, чем явным образом указано в каждом пункте формулы изобретения. Напротив, как показывает следующая формула изобретения, объект изобретения заключается меньше, чем во всех признаках одного раскрытого варианта осуществления. Таким образом, следующая формула изобретения настоящим включена в подробное описание и чертежи, при этом каждый пункт формулы изобретения сам по себе представляет отдельный вариант осуществления.
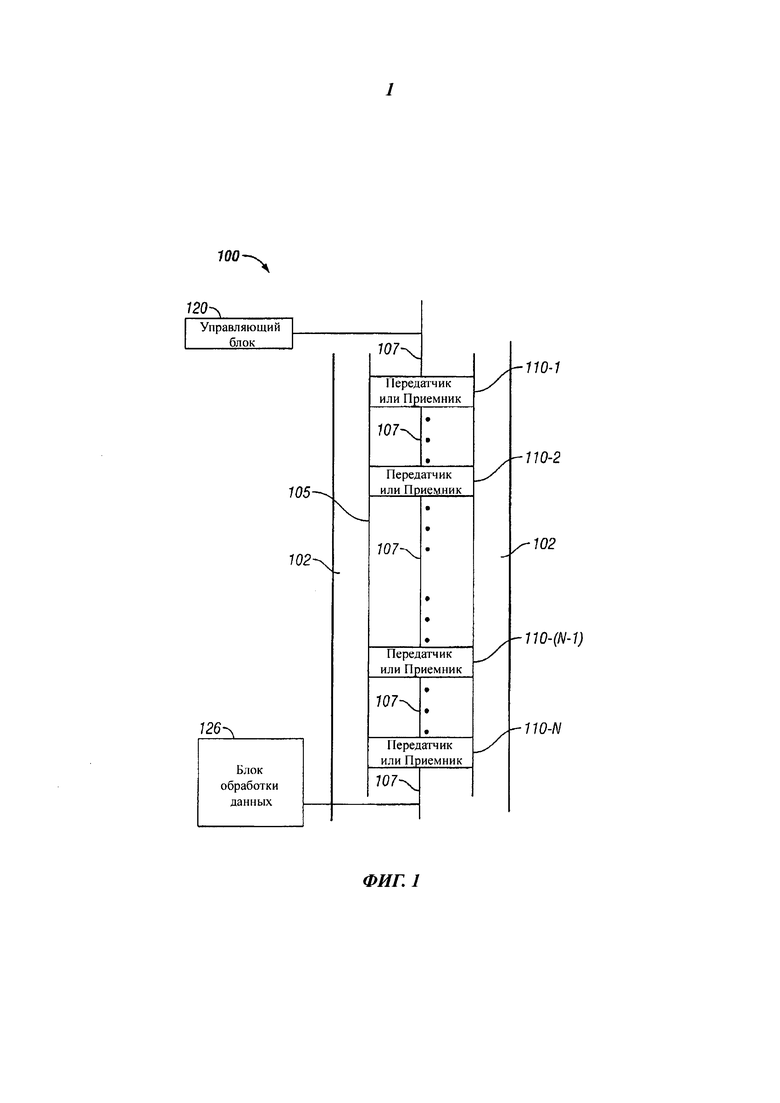
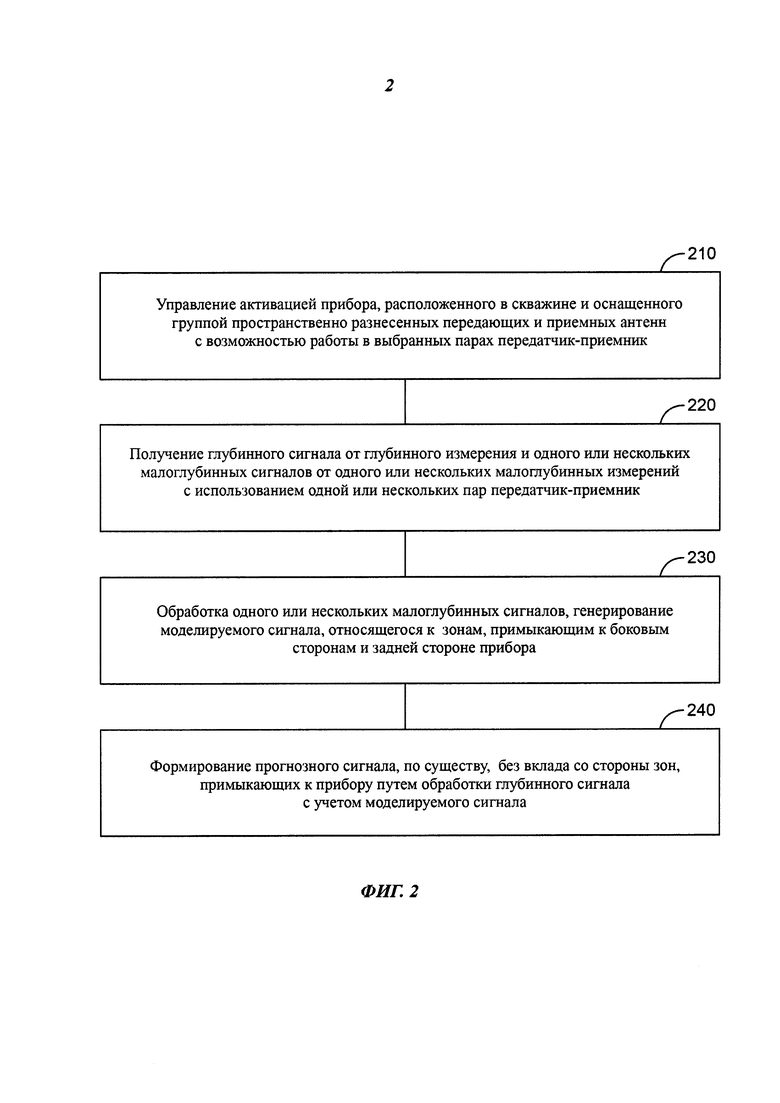
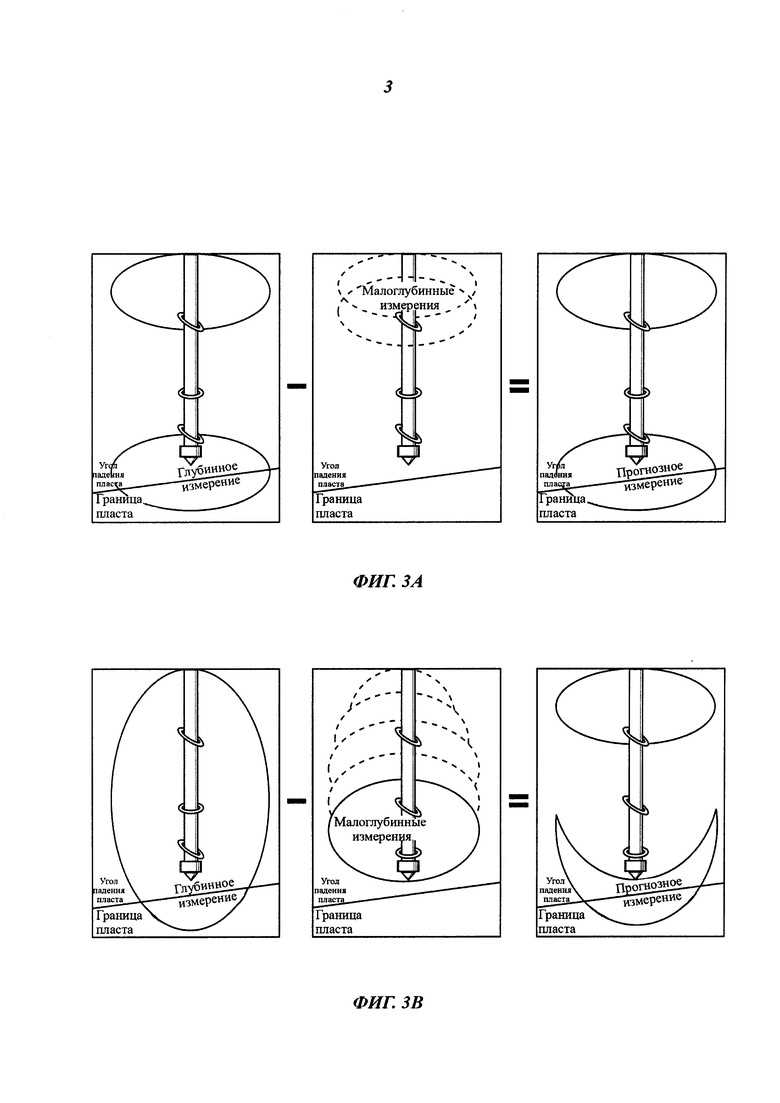
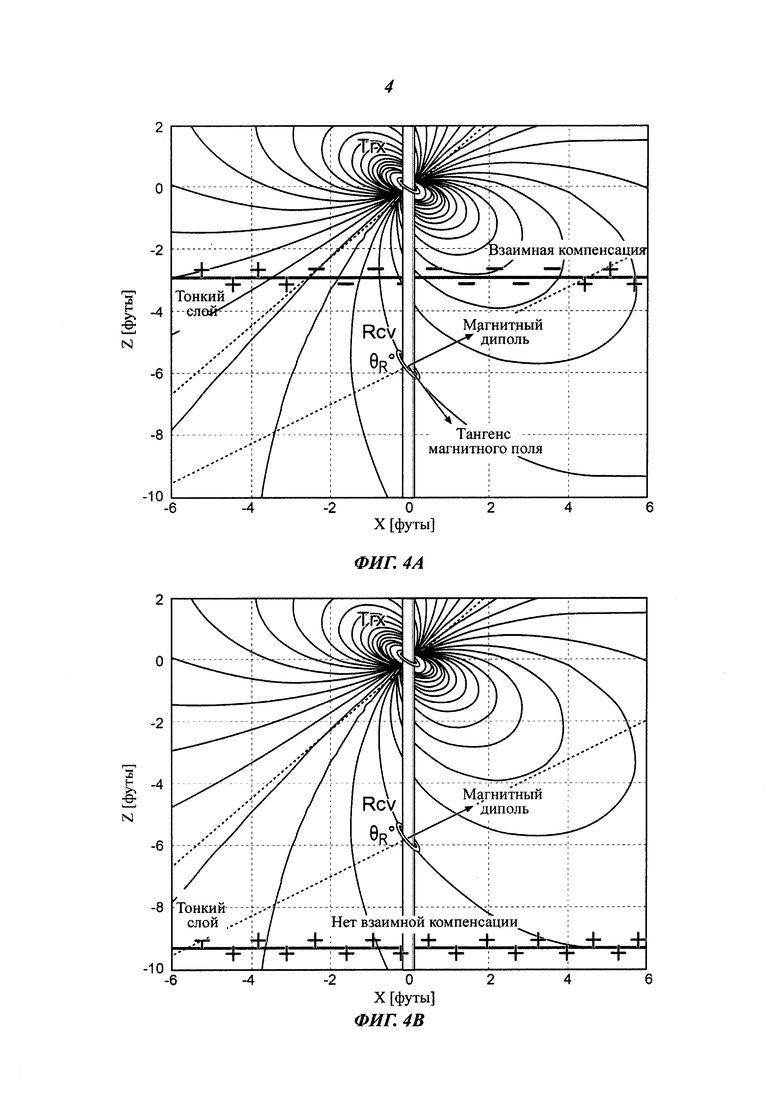
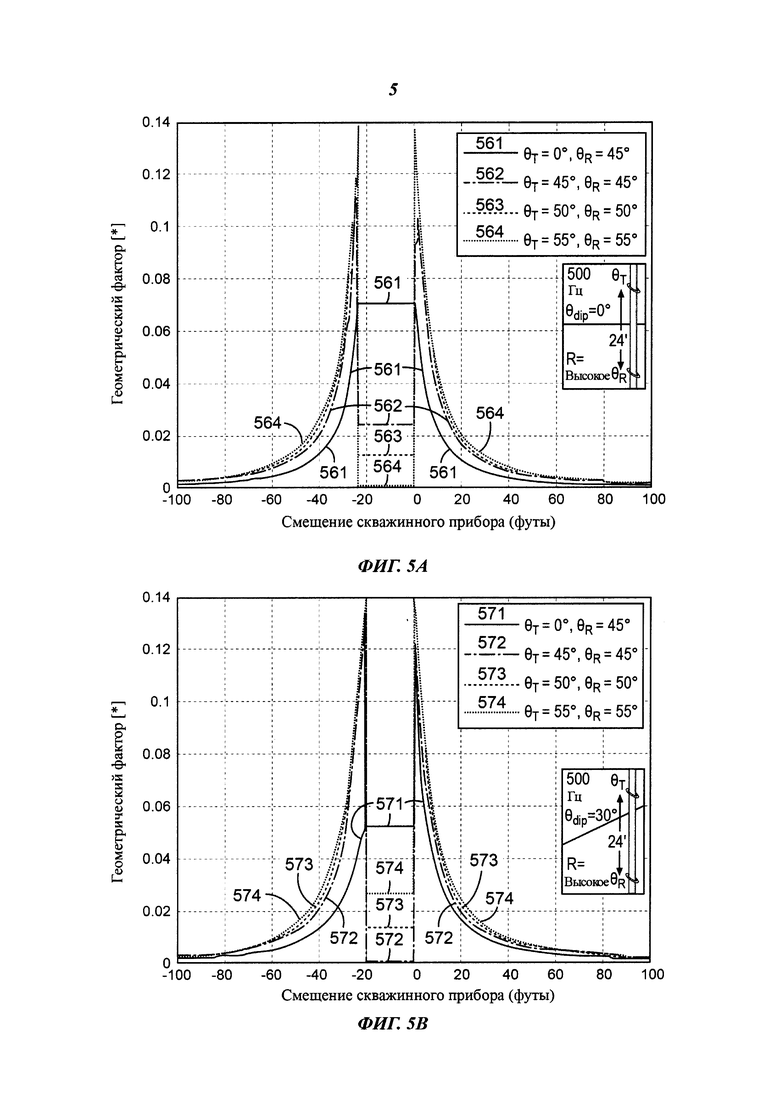
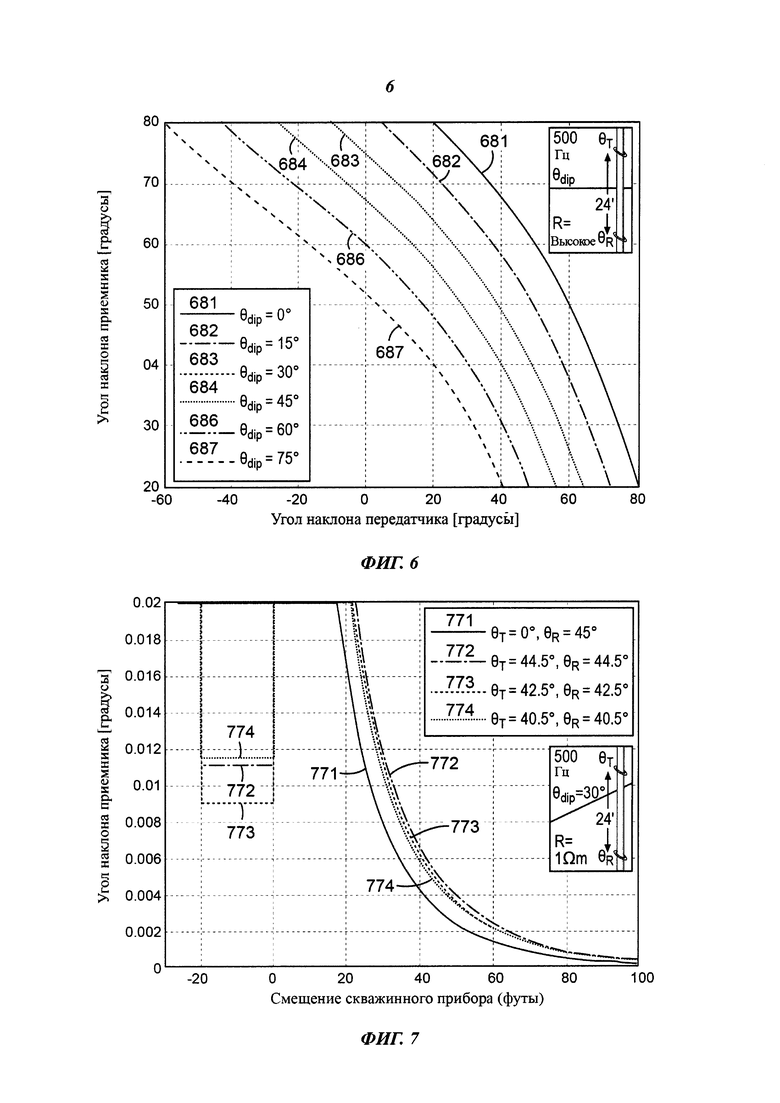
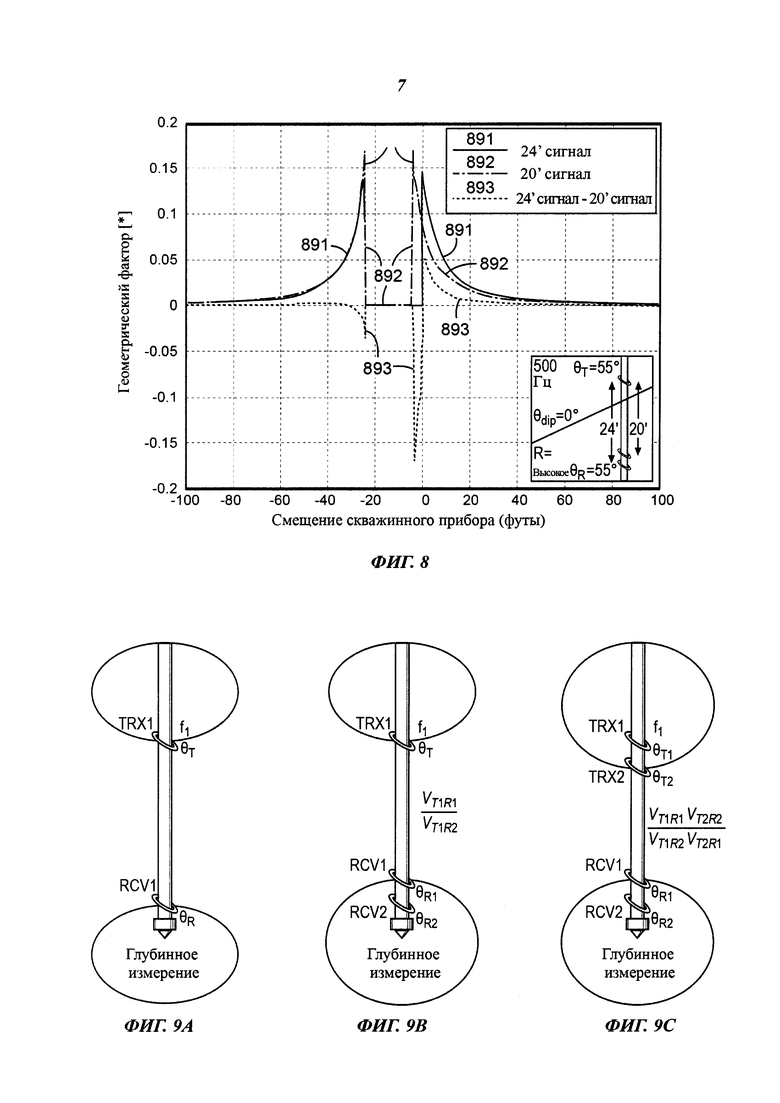
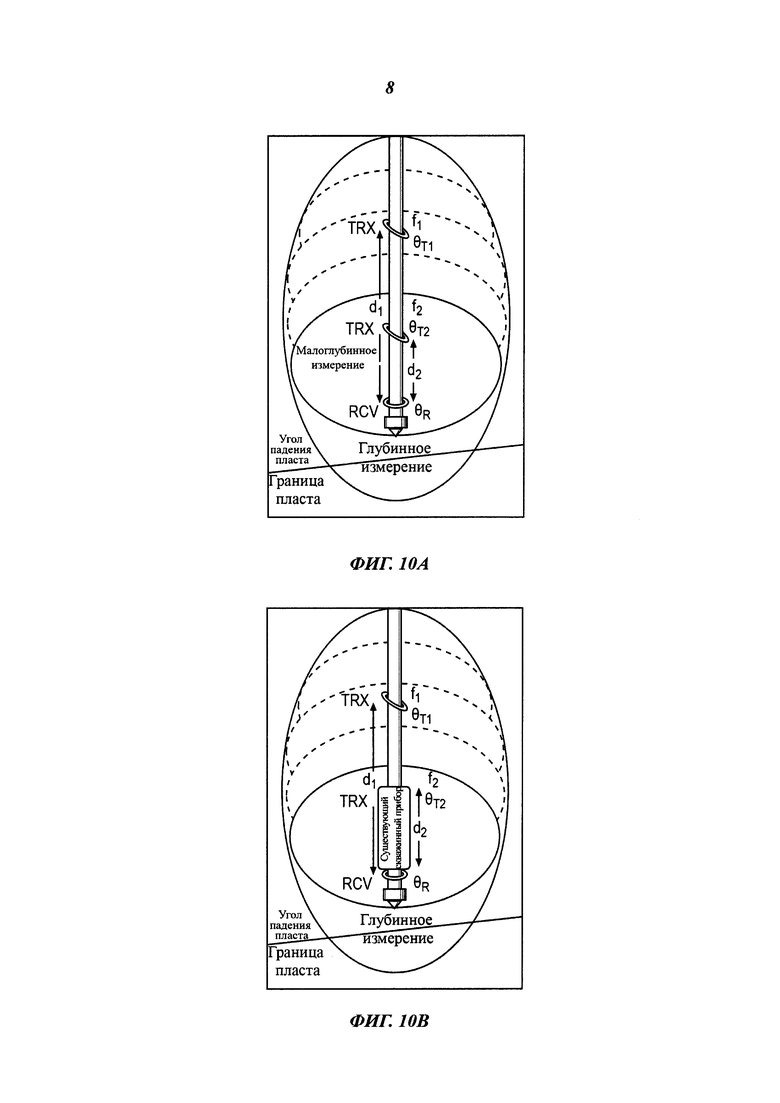
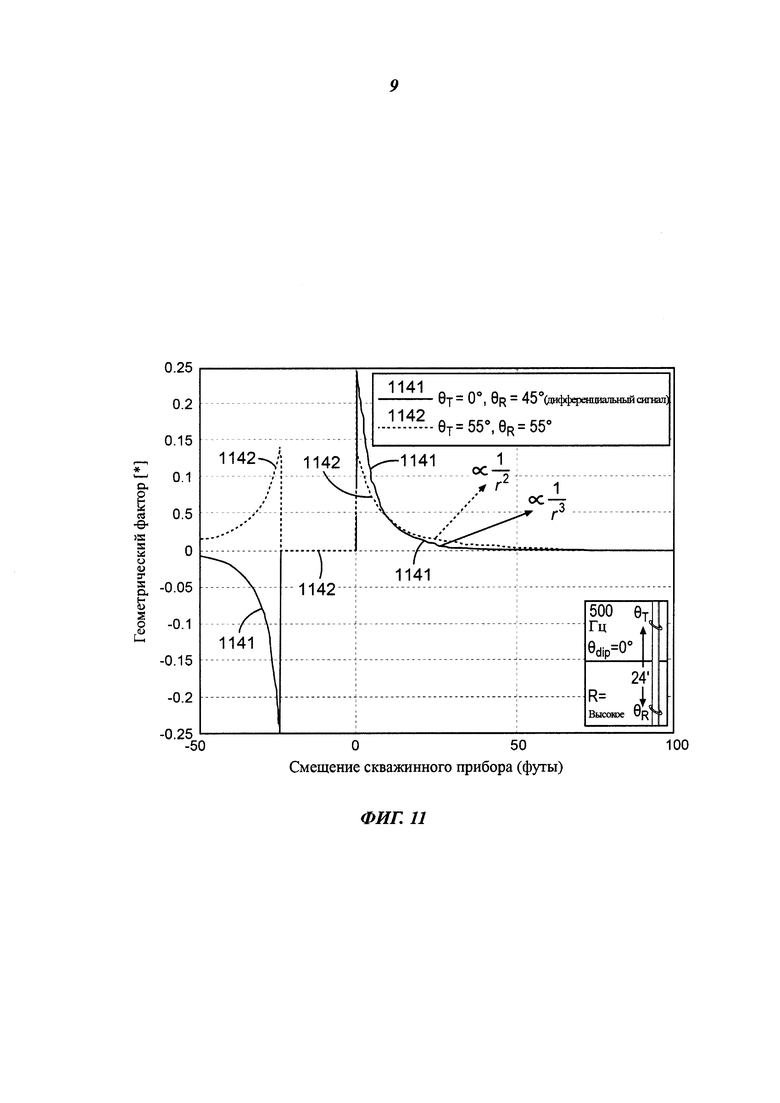
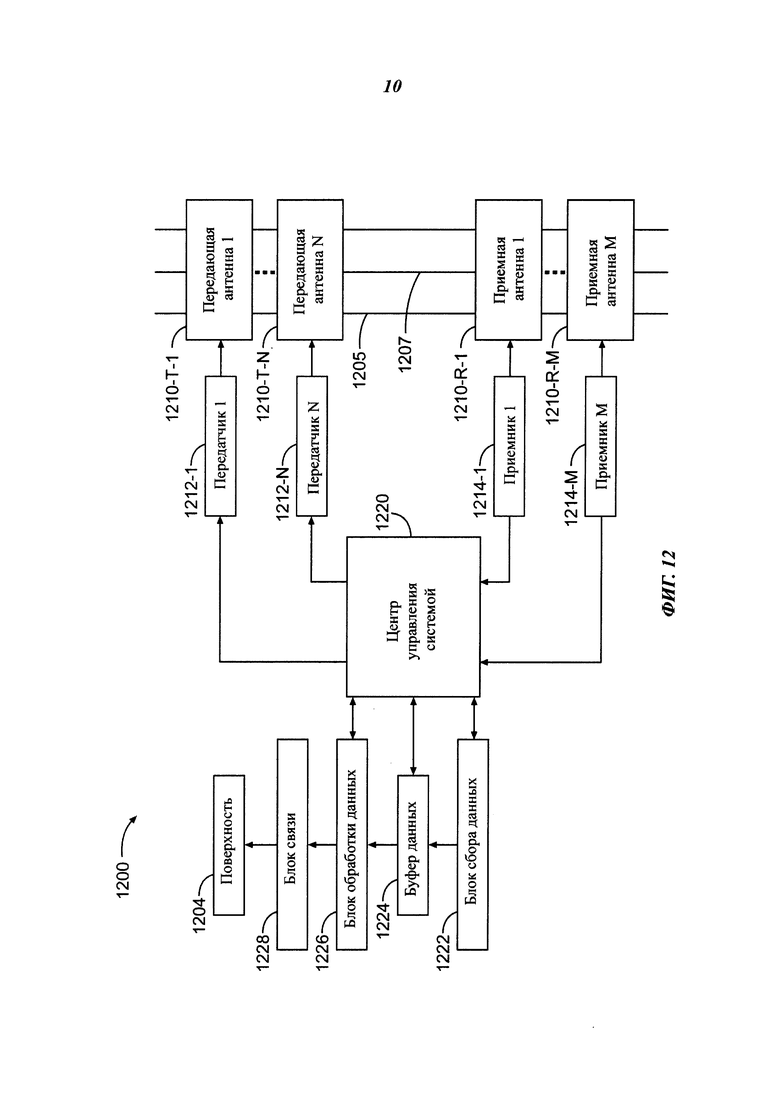
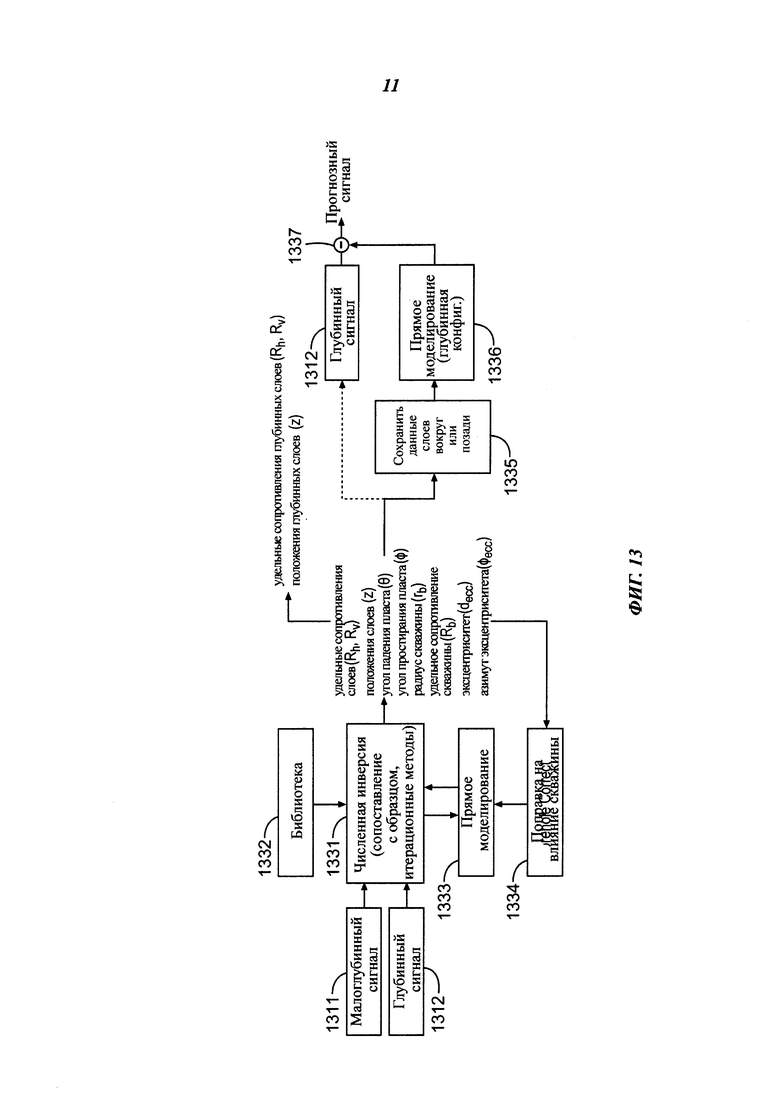
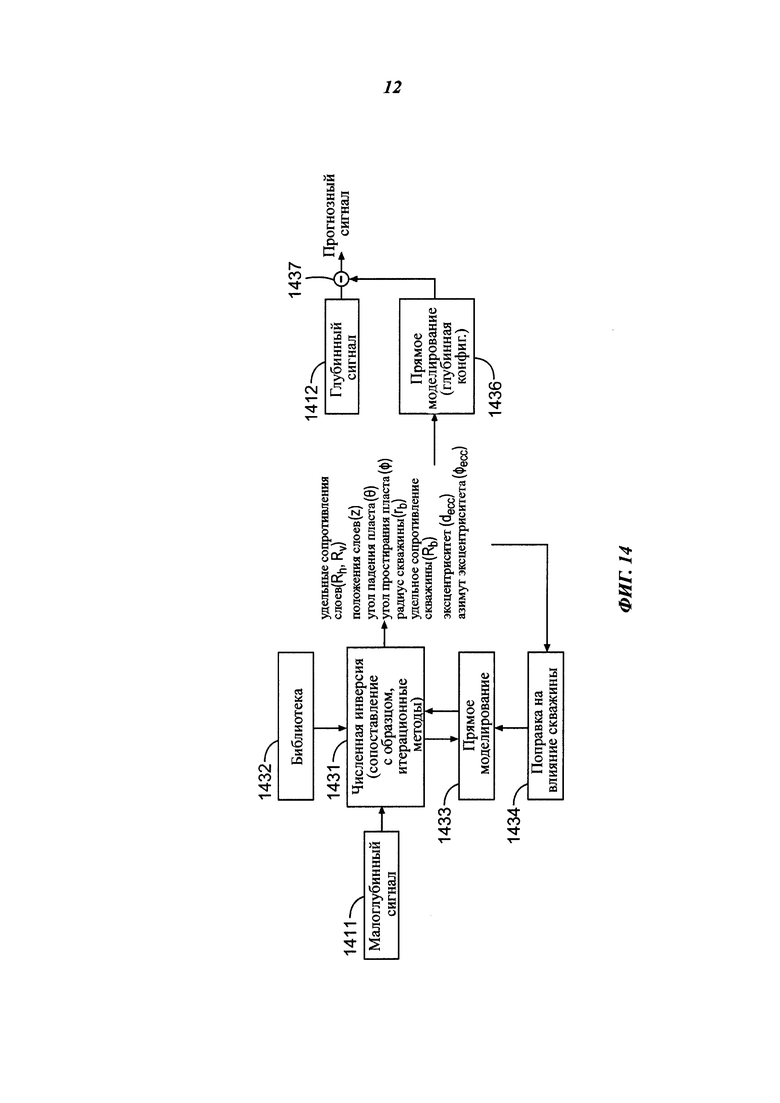
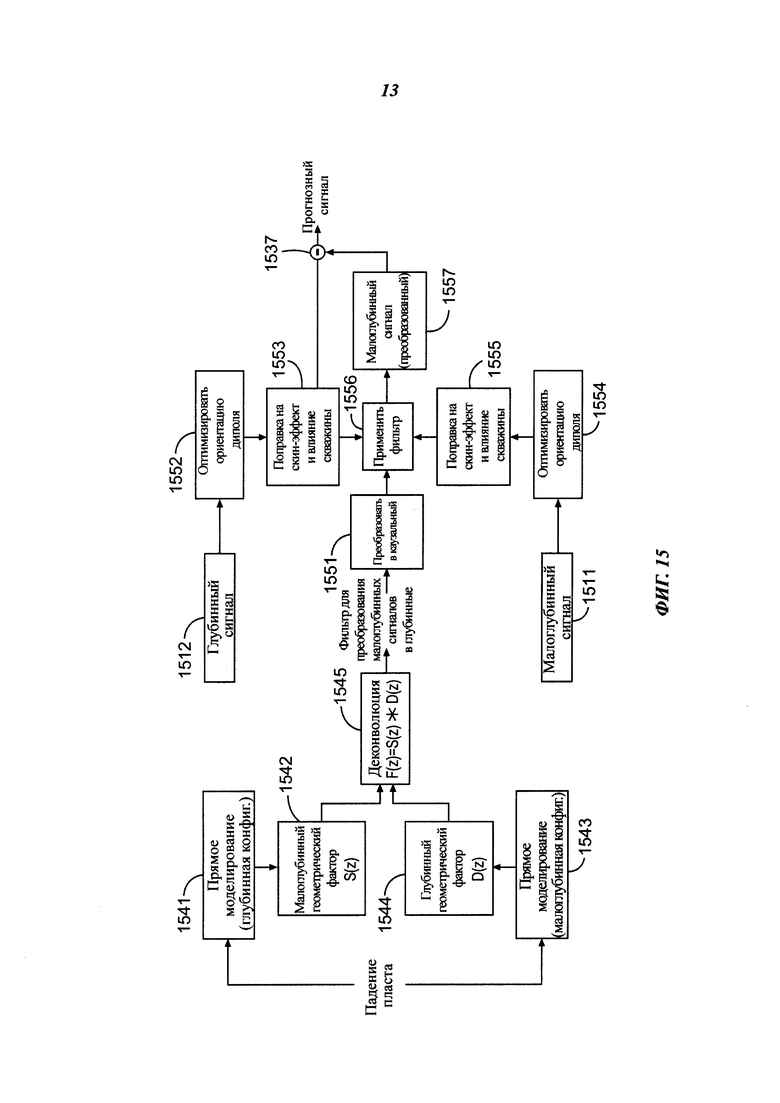
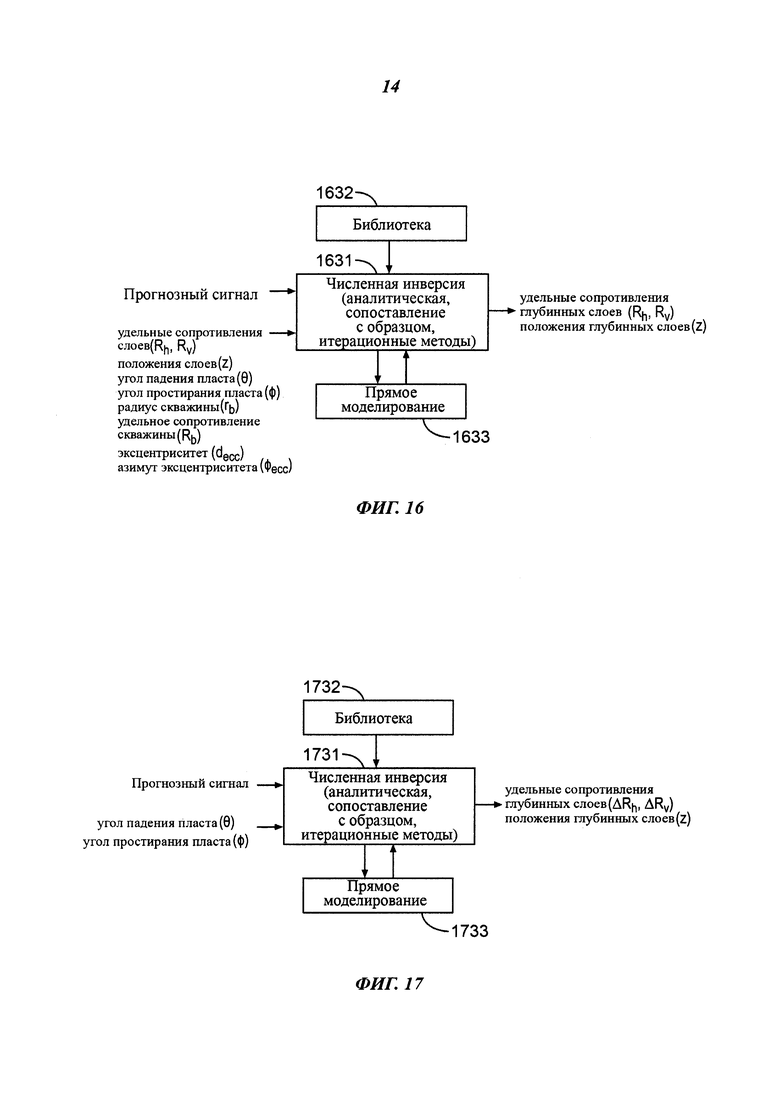
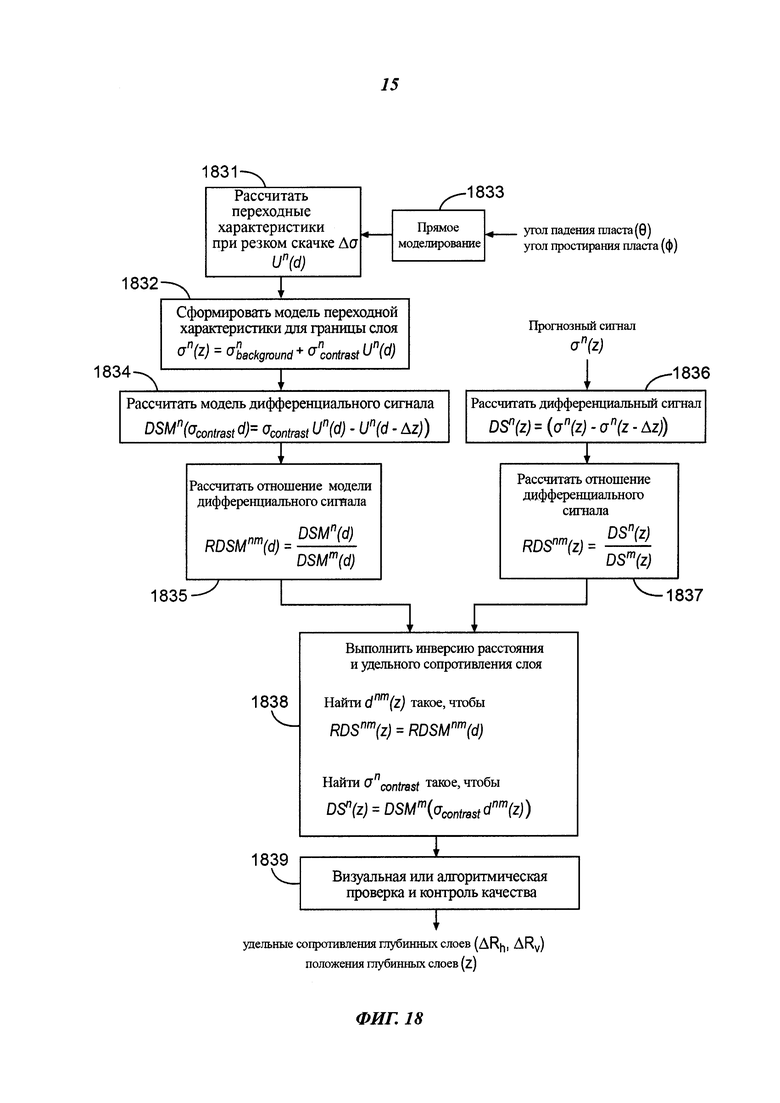
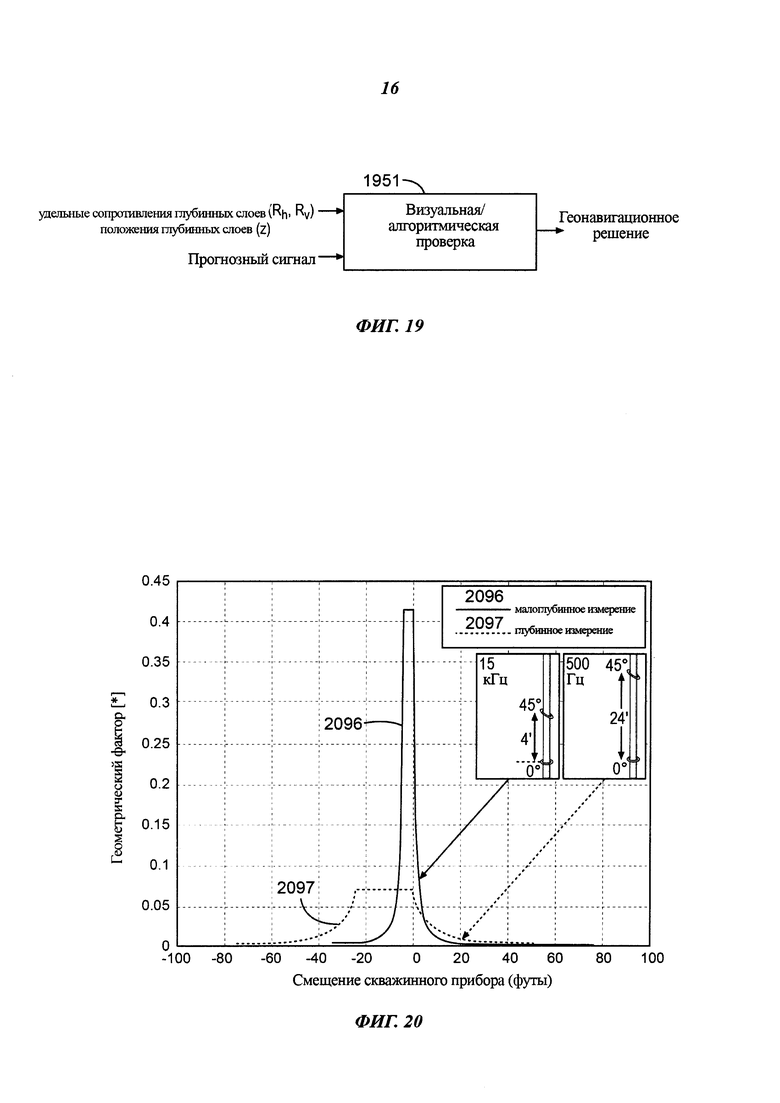
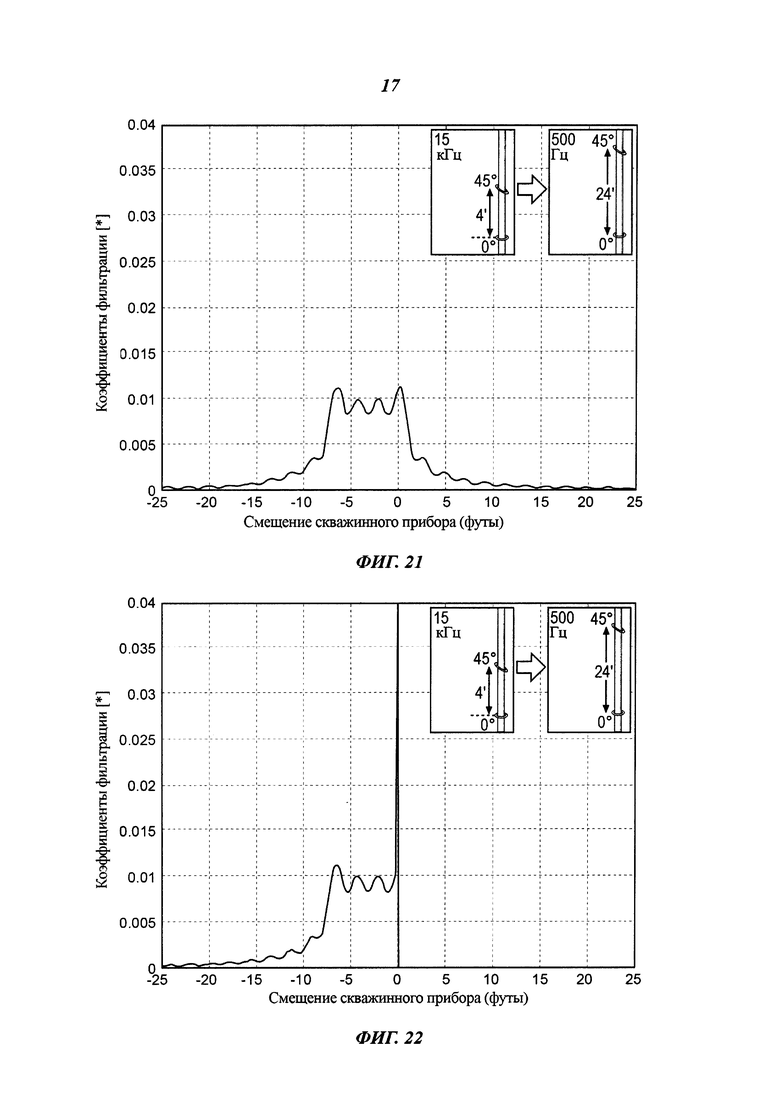
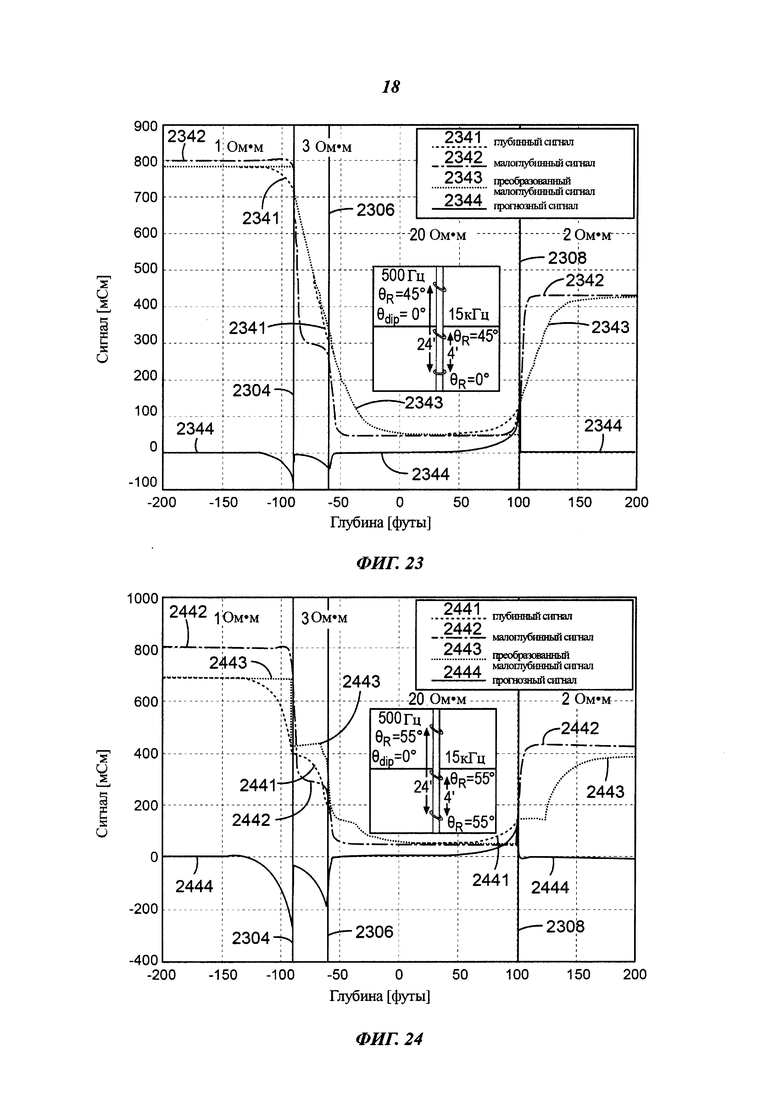
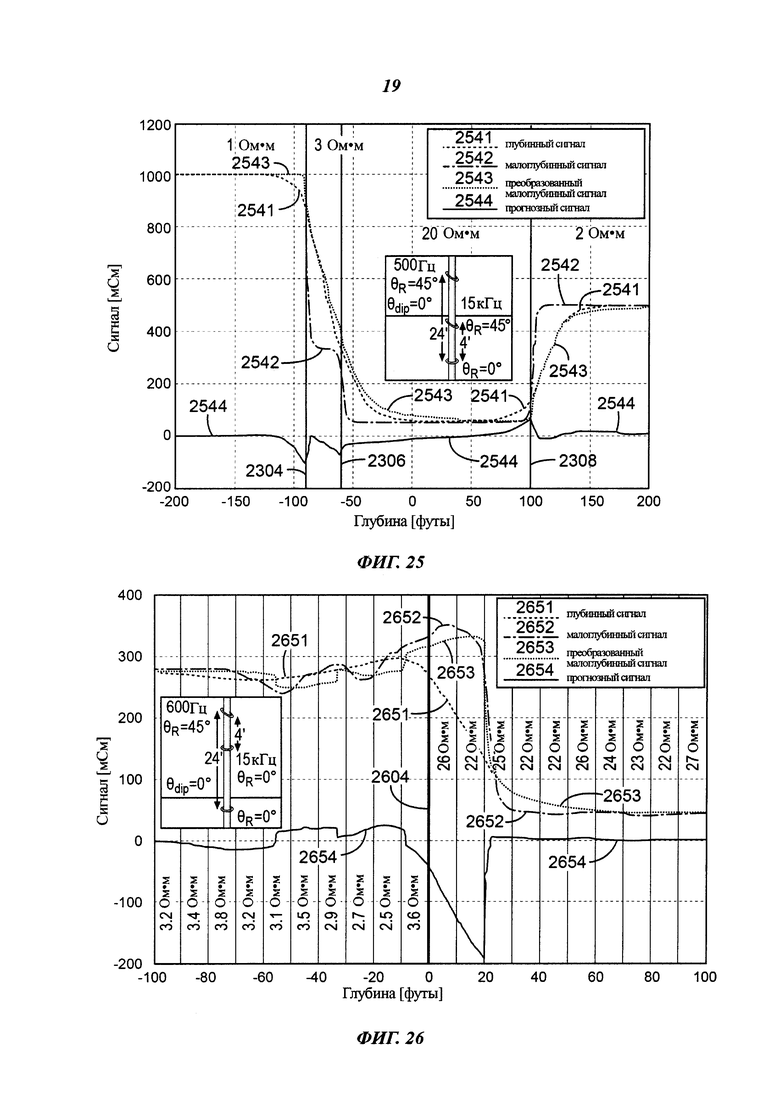
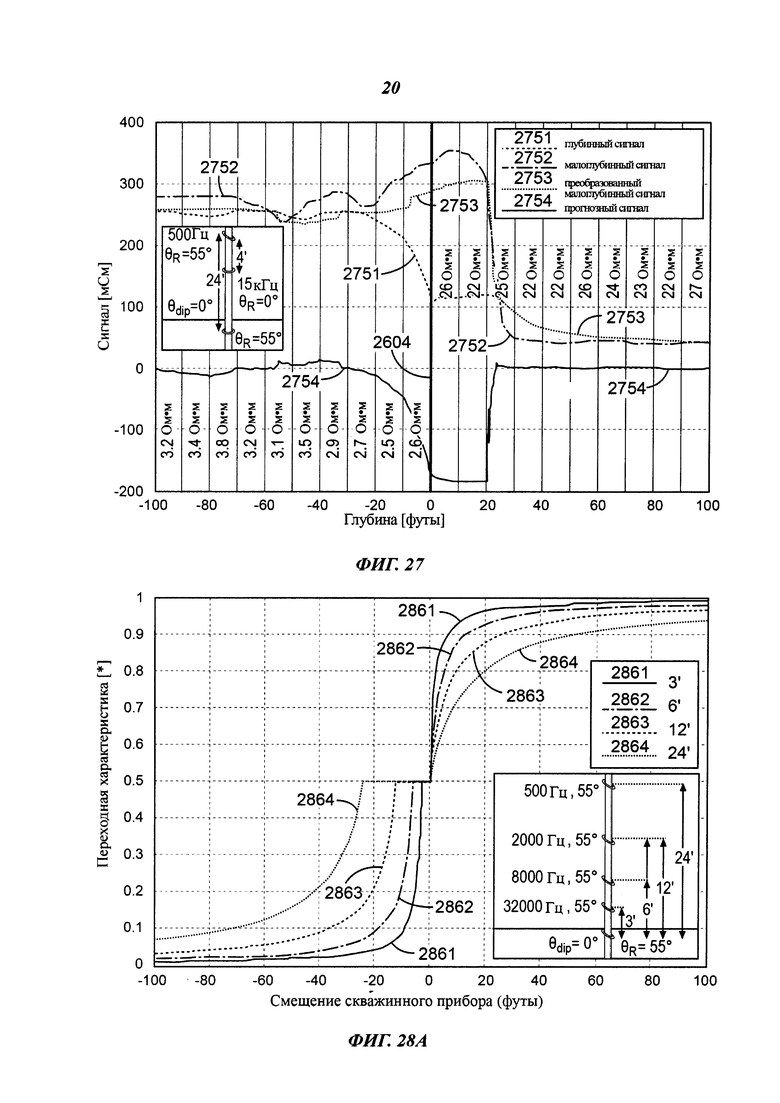
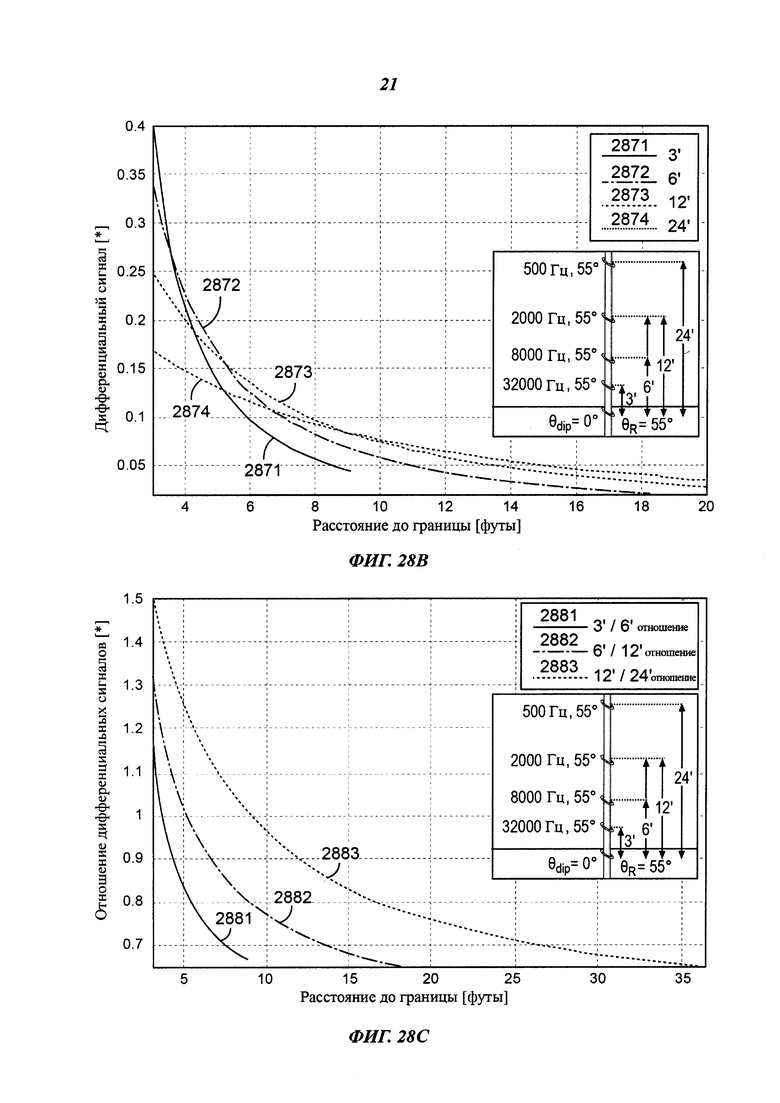
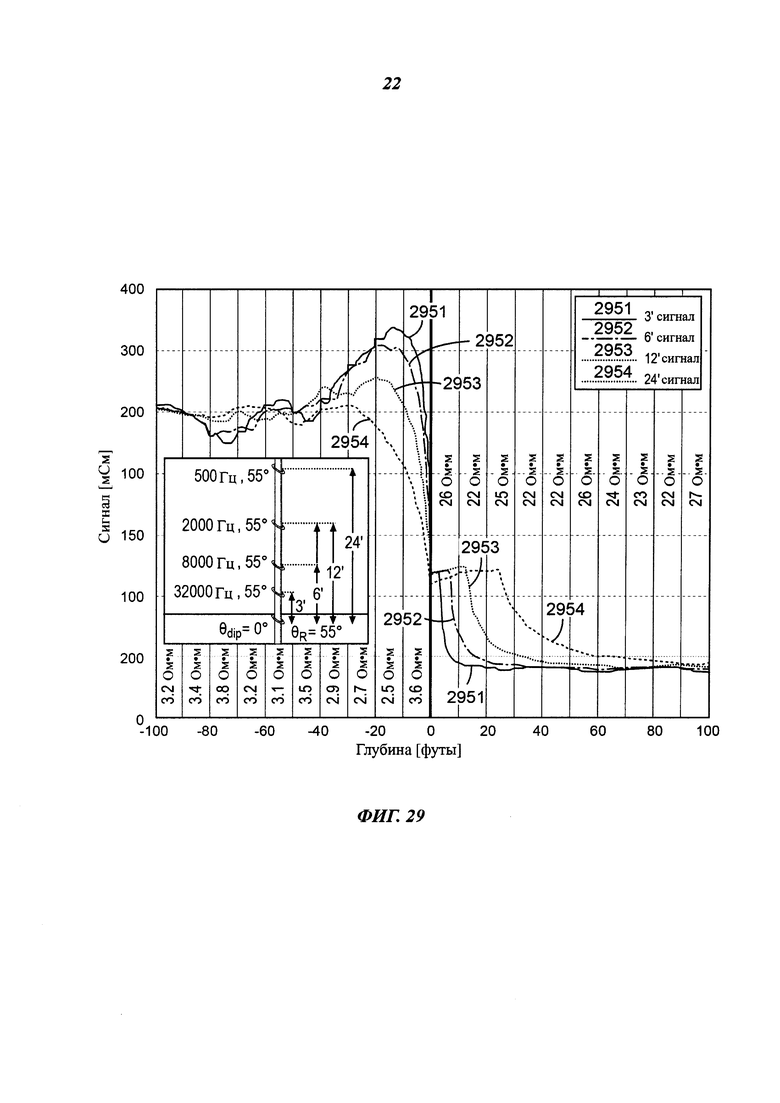
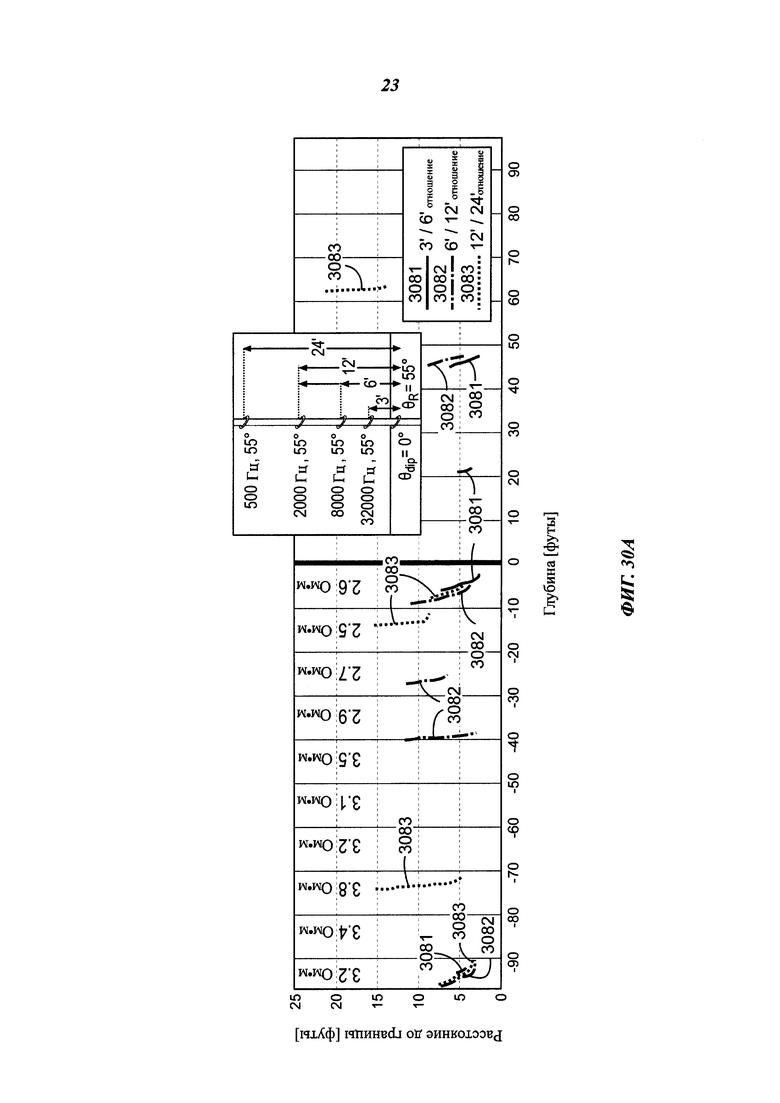
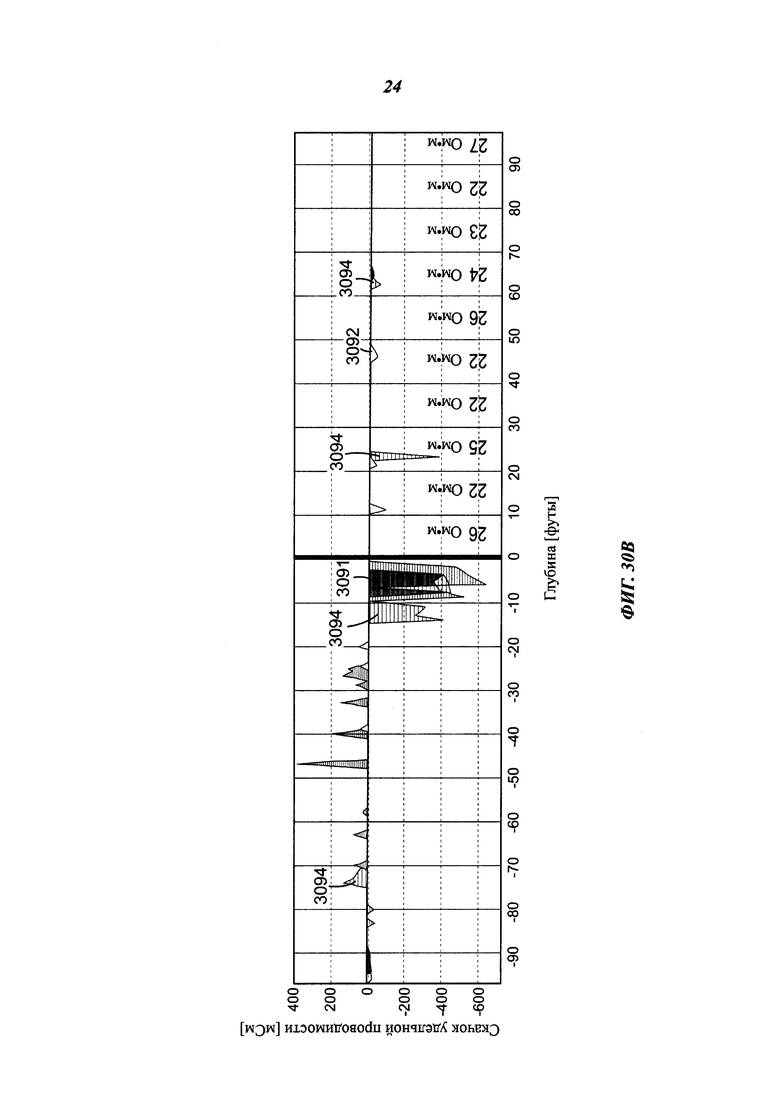
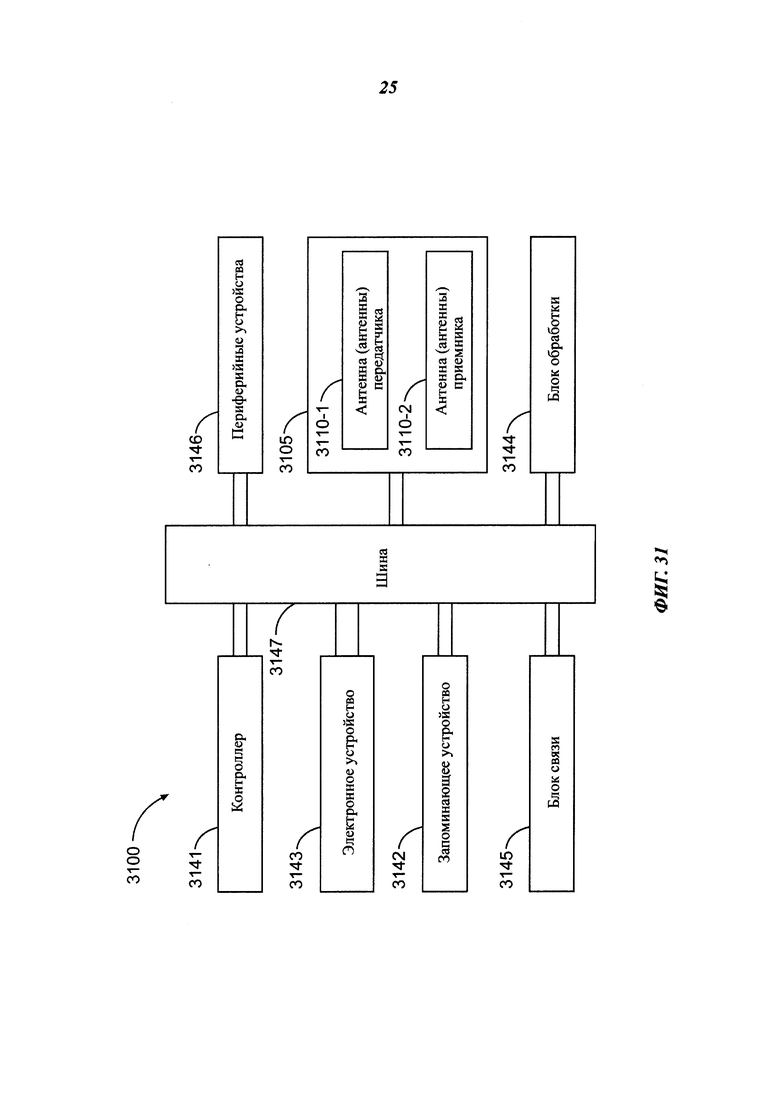
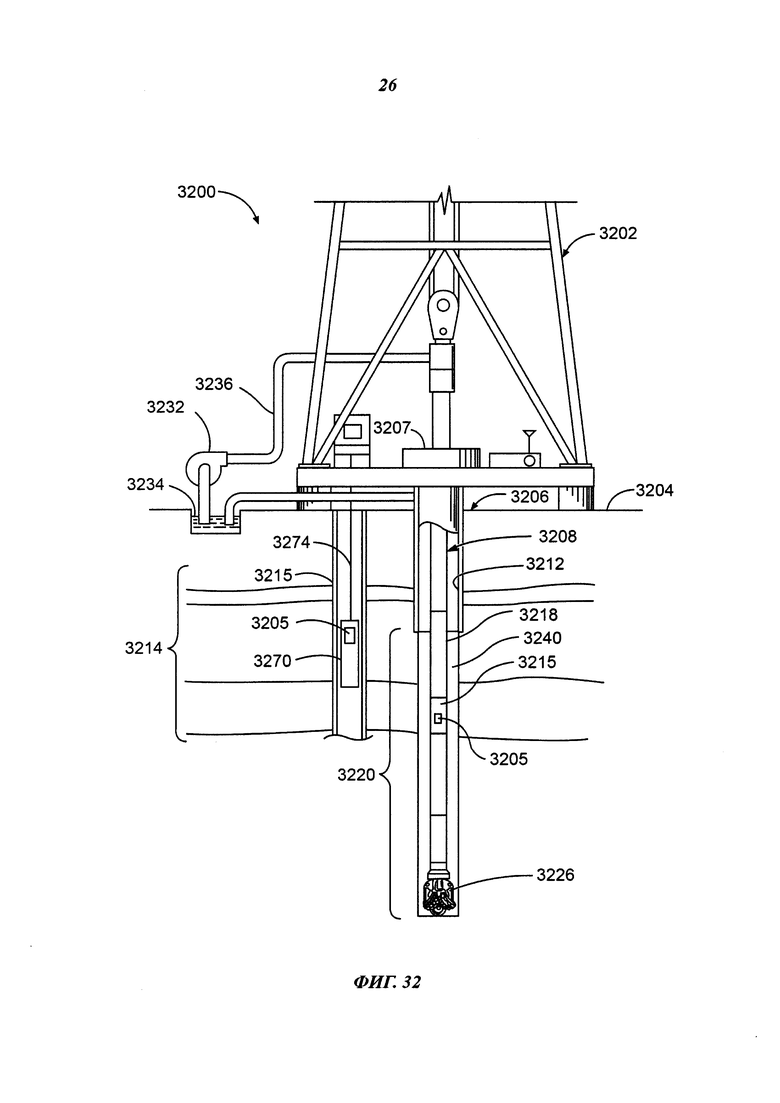
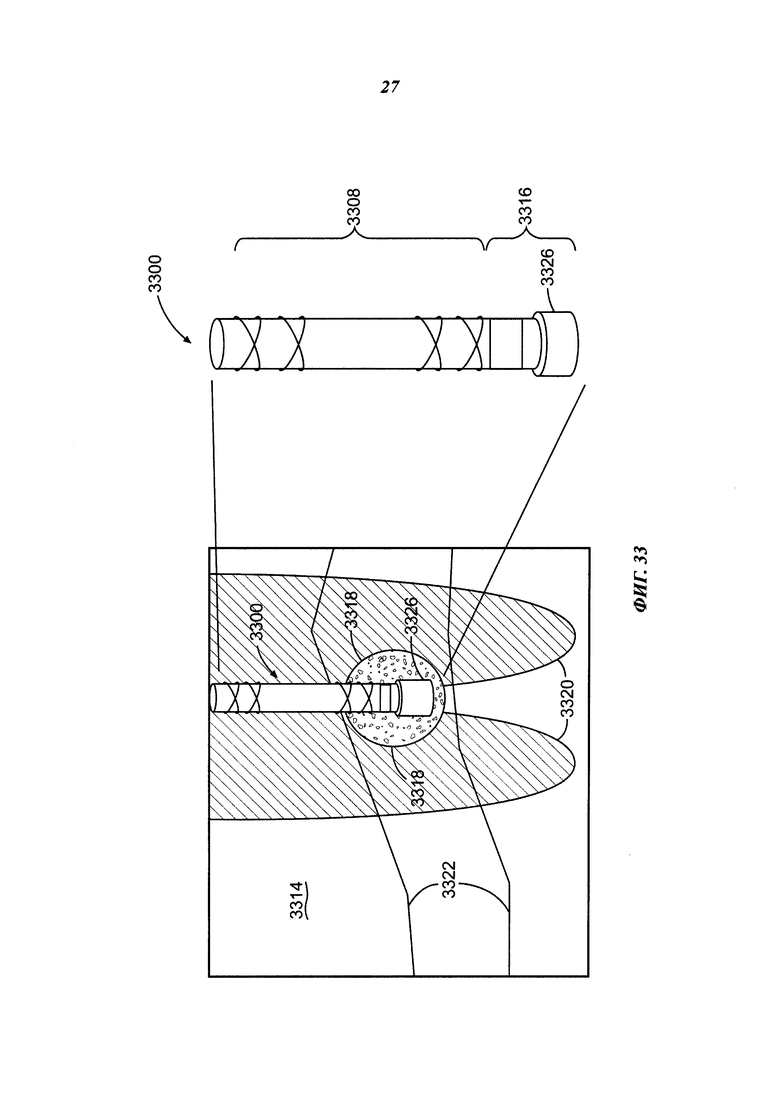
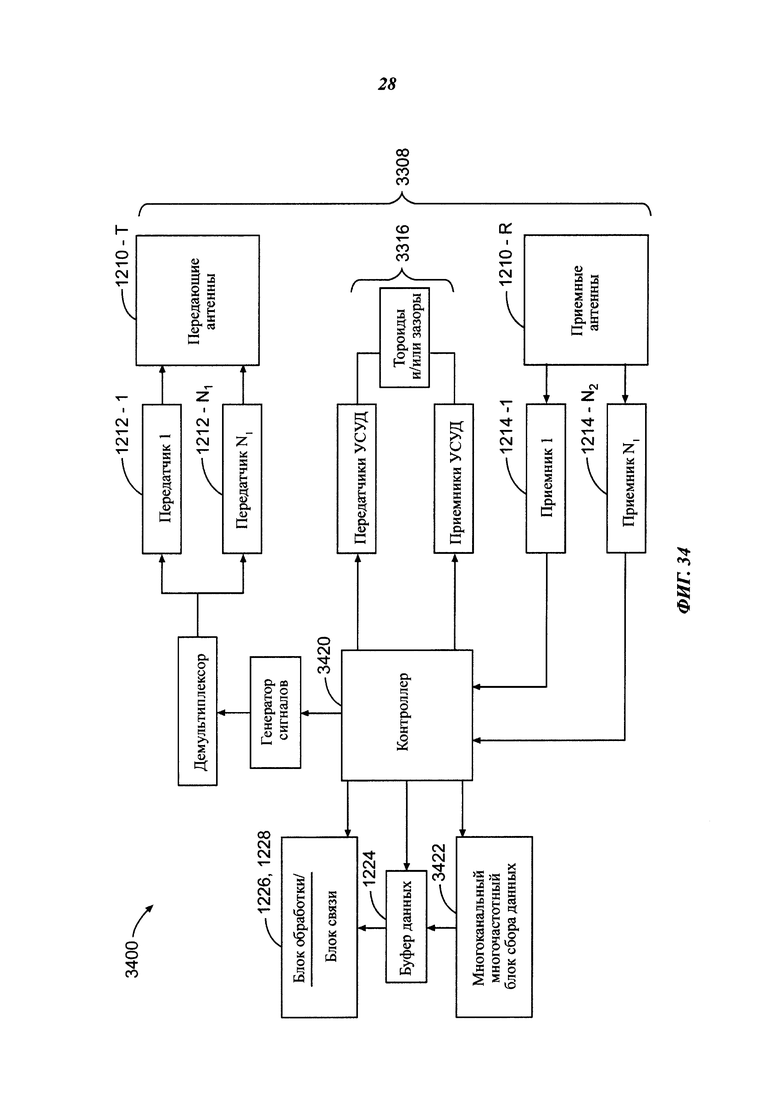
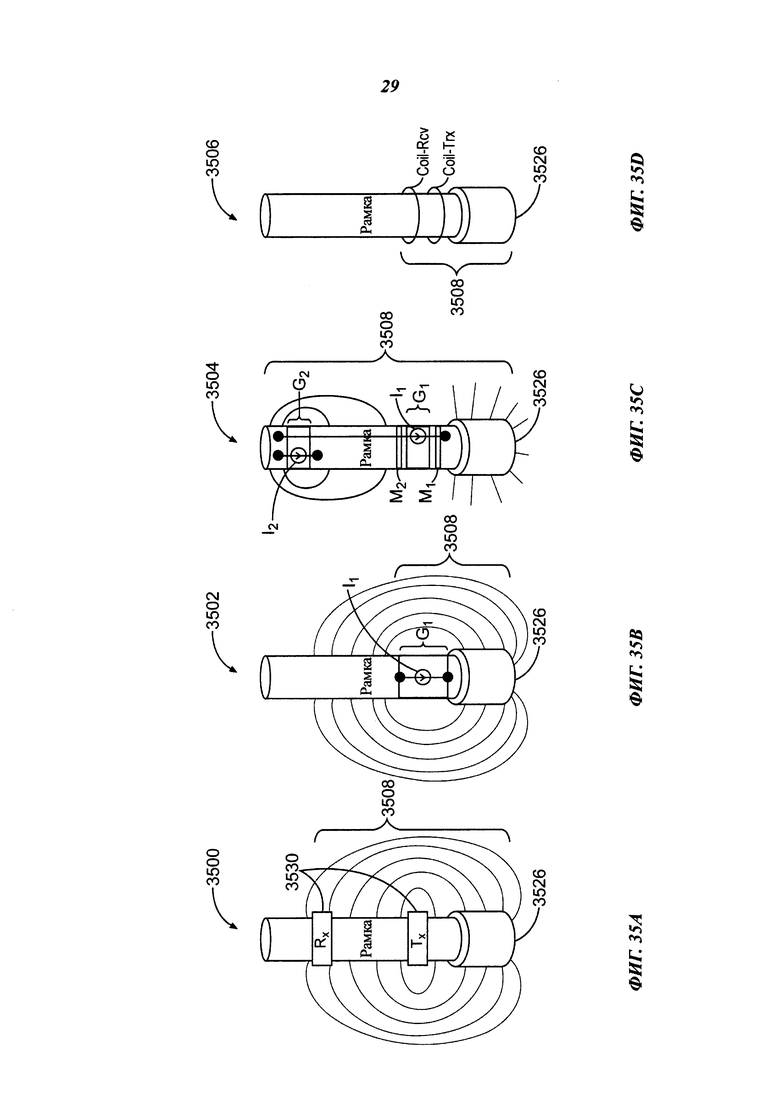
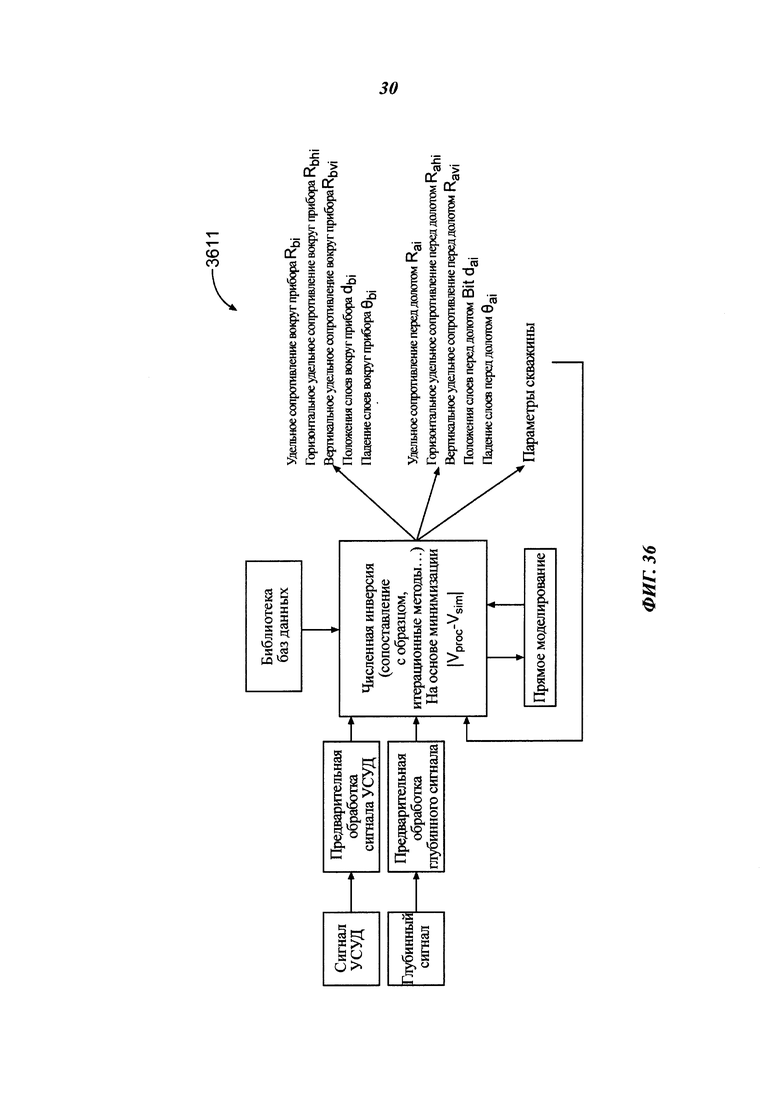
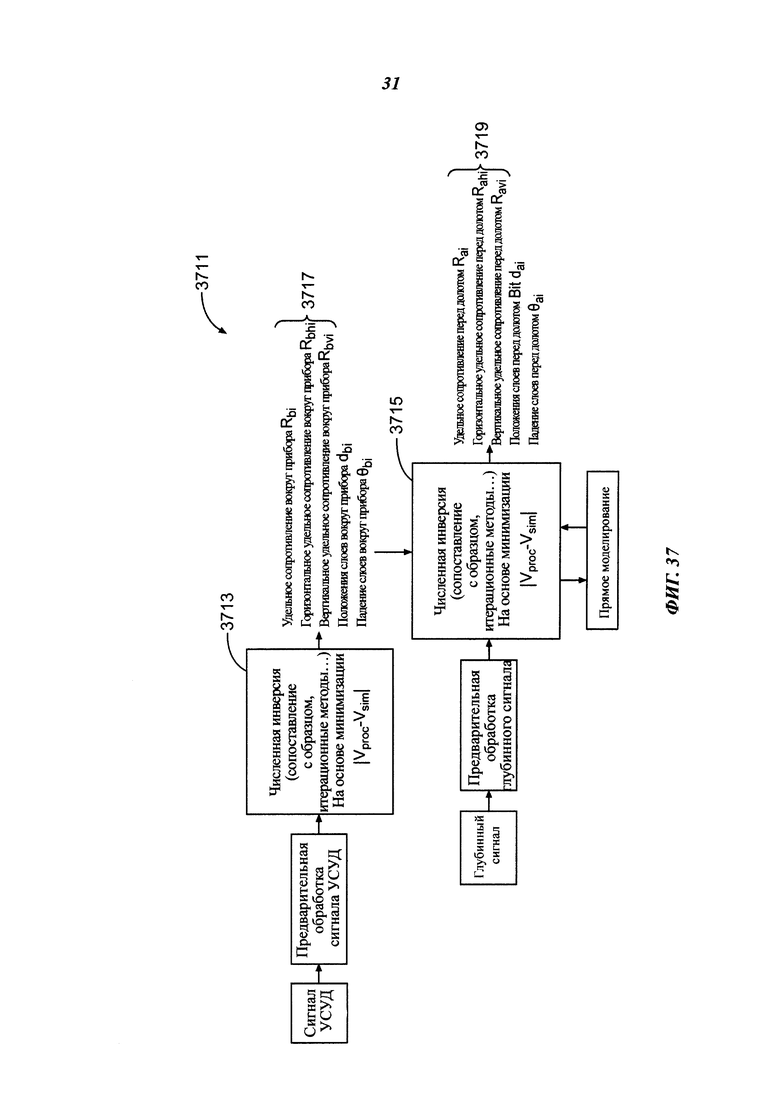
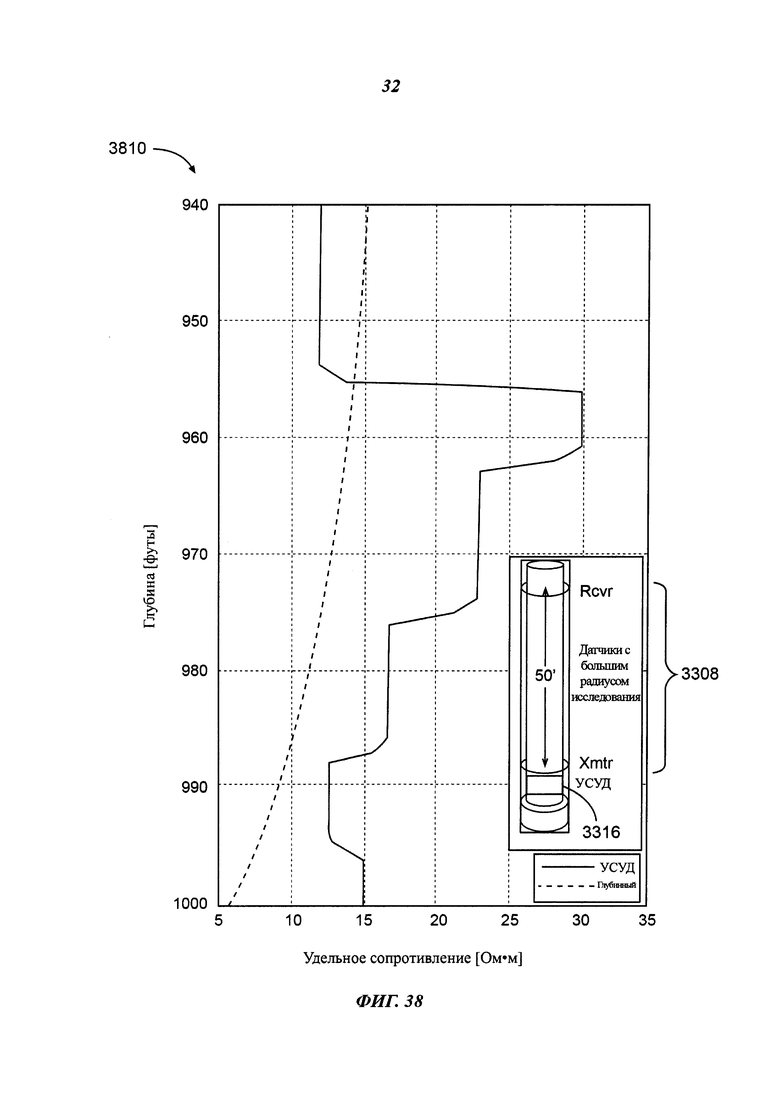
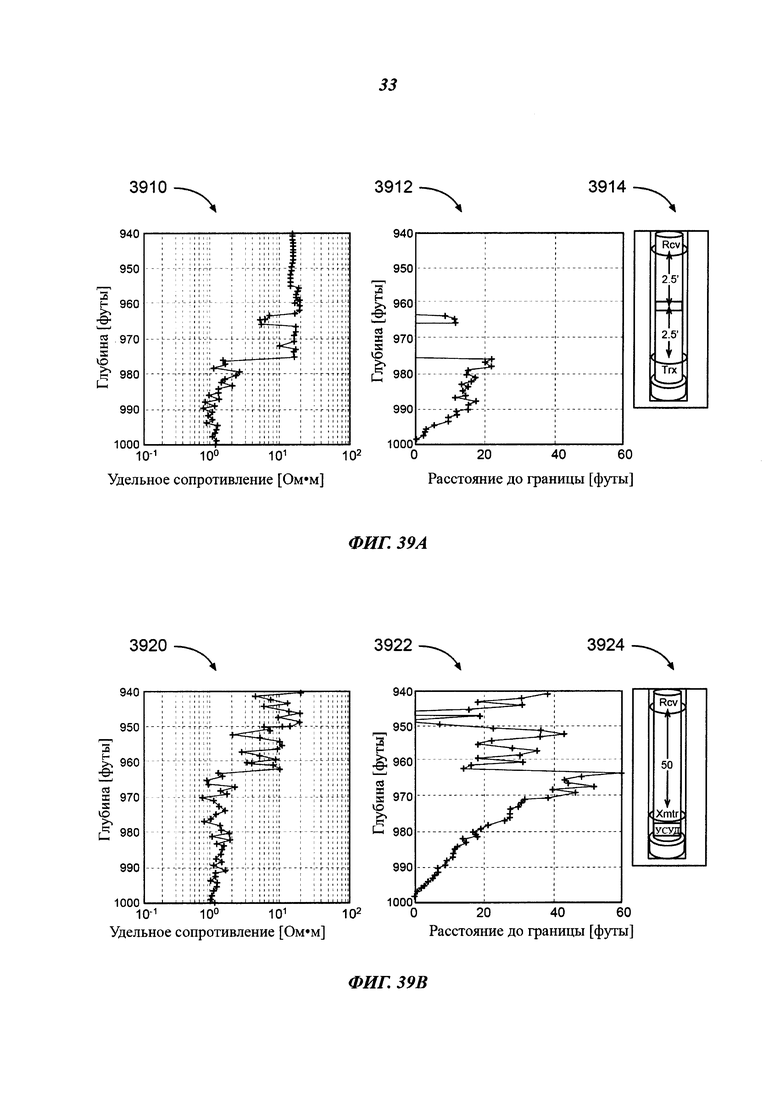
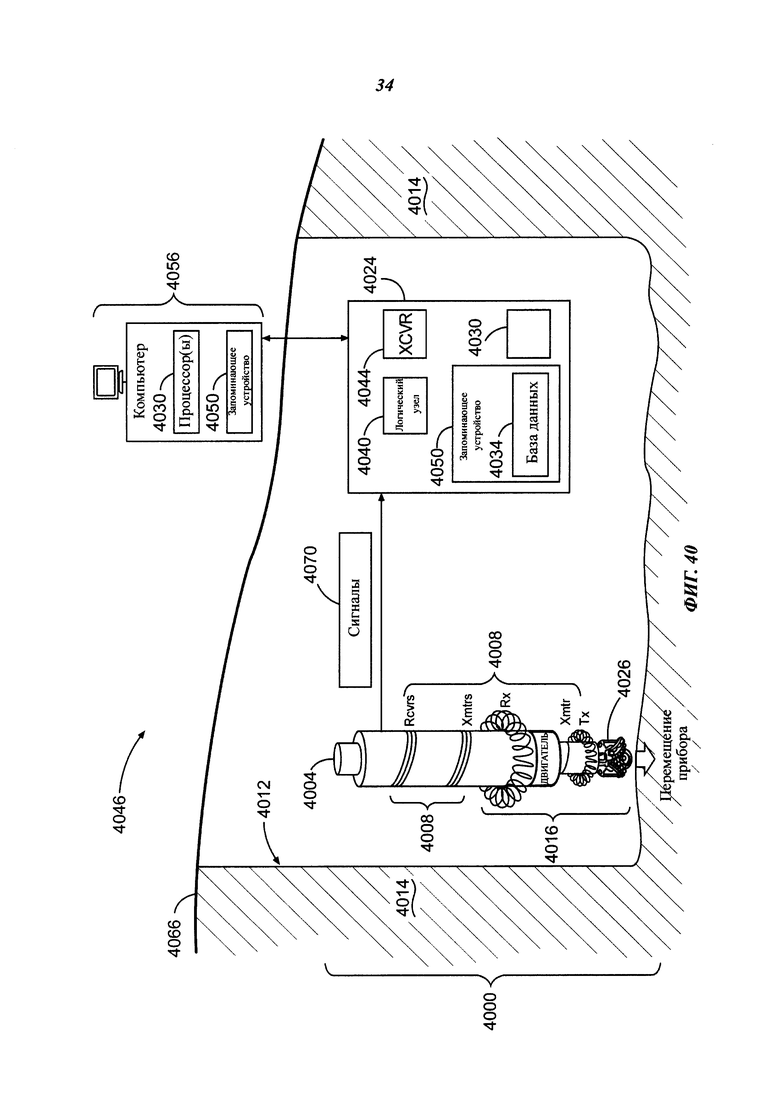
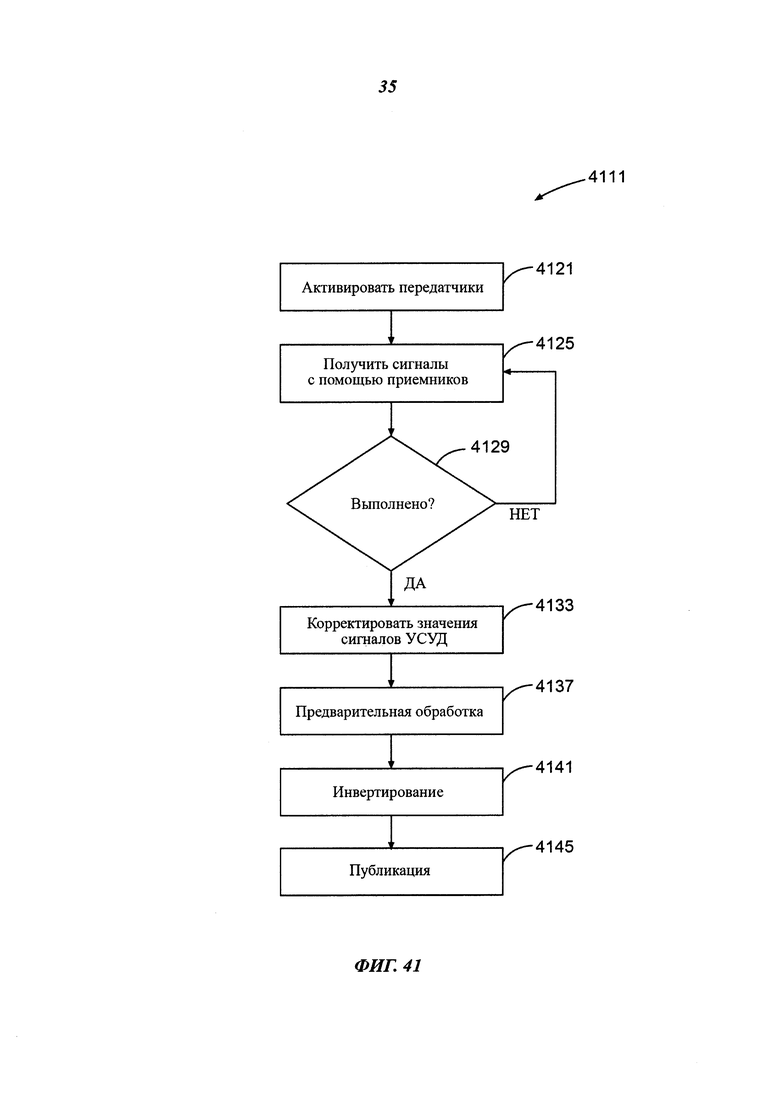
Изобретение относится к каротажу скважин во время бурения. Сущность: получают сигналы от пласта посредством электромагнитной антенной решетки для глубинных измерений, причем значения сигналов от пласта зависят от свойств геологического пласта. Сигналы от пласта могут также быть получены от датчика удельного сопротивления у долота (УСУД (ABR)). Датчик УСУД (ABR) содержит буровое долото, электрически соединенное с тороидом или с несколькими электродами, причем электроды разделены по меньшей мере одним зазором. Инвертируют значения сигналов от пласта для преобразования этих значений в уточненный результат измерения удельного сопротивления для геологического пласта. Инвертирование может включать в себя определение по меньшей мере одного из относительного расстояния между слоями геологического пласта, ориентации пластов относительно корпуса или градиента удельного сопротивления слоев, причем эти слои локально не пройдены долотом. Технический результат: обеспечение измерений, не пройденных долотом. 3 н. и 18 з.п. ф-лы, 41 ил.
1. Система, содержащая:
корпус;
электромагнитную антенную решетку для глубинных измерений, содержащую несколько элементов, включая по меньшей мере одну передающую антенну и одну приемную антенну, присоединенные к корпусу;
датчик удельного сопротивления у долота (УСУД (ABR)), присоединенный к корпусу, причем датчик УСУД (ABR) содержит буровое долото, электрически соединенное с тороидом или с несколькими электродами, а электроды разделены по меньшей мере одним зазором; и
процессор, выполненный с возможностью получения от электромагнитной антенной решетки для глубинных измерений и от датчика УСУД (ABR) сигналов от пласта, причем значения сигналов от пласта зависят от свойств геологического пласта, и с возможностью инвертирования значений сигналов от пласта, чтобы преобразовать эти значения в уточненный результат измерения удельного сопротивления для геологического пласта, при этом инвертирование включает в себя определение по меньшей мере одного из относительного расстояния между слоями геологического пласта, ориентации пластов относительно корпуса или градиента удельного сопротивления слоев, причем эти слои локально не пройдены долотом.
2. Система по п. 1, в которой процессор присоединен к корпусу или размещен в рабочей станции на поверхности геологического пласта.
3. Система по п. 1, в которой один из элементов в электромагнитной антенной решетке для глубинных измерений расположен с одной стороны бурового двигателя, а другой из элементов электромагнитной антенной решетки для глубинных измерений расположен с другой стороны бурового двигателя.
4. Система по п. 3, в которой электромагнитная приемная антенная решетка содержит по меньшей мере одно из рамки, наклонной рамочной антенны или соленоида.
5. Система по п. 1, в которой для уменьшения разности напряжений между контрольными электродами предусмотрен по меньшей мере один зазор.
6. Система по п. 1, в которой корпус содержит прибор для измерений в процессе бурения или прибор для каротажа во время бурения.
7. Способ, реализуемый на базе одного или нескольких выполняющих его процессоров, содержащий:
получение сигналов от пласта от электромагнитной антенной решетки для глубинных измерений, содержащей несколько элементов, включая по меньшей мере одну передающую антенну и одну приемную антенну, и от датчика удельного сопротивления у долота (УСУД (ABR)), причем значения сигналов от пласта зависят от свойств геологического пласта, при этом датчик УСУД (ABR) содержит буровое долото, электрически соединенное с тороидом или с несколькими электродами, а электроды разделены по меньшей мере одним зазором; и
инвертирование значения сигналов от пласта, чтобы преобразовать эти значения в уточненный результат измерения удельного сопротивления для геологического пласта, при этом инвертирование включает в себя определение по меньшей мере одного из относительного расстояния между слоями геологического пласта, ориентации пластов относительно корпуса или градиента удельного сопротивления слоев, причем эти слои локально не пройдены долотом.
8. Способ по п. 7, дополнительно содержащий:
возбуждение по меньшей мере одной передающей антенны импульсным или стационарным сигналом передачи для обеспечения в геологическом пласте сигналов от пласта.
9. Способ по п. 7, дополнительно содержащий:
выполнение предварительной обработки сигналов от пласта до инвертирования путем применения по меньшей мере одного из фильтрации, фокусировки для увеличения разрешения, преобразования измеренных значений удельного сопротивления при помощи справочной таблицы, умножения на постоянную прибора, многоглубинного синтеза сигналов антенной решетки, бинирования, восстановления нескольких компонентов по вращению скважинного прибора или азимутального удаления до заданного угла простирания.
10. Способ по п. 7, в котором инвертирование содержит:
инвертирование значений сигналов от пласта, чтобы преобразовать эти значения в результаты измерения параметров пласта, содержащие электрические свойства или геологические свойства.
11. Способ по п. 10, в котором электрические свойства или геологические свойства включают в себя по меньшей мере одно из удельного сопротивления слоев, расстояния до слоев или направления к слоям.
12. Способ по п. 7, в котором датчик УСУД (ABR) используют для обеспечения некоторых сигналов от пласта путем выполнения индукционных неазимутальных измерений.
13. Способ по п. 7, в котором инвертирование содержит последовательный процесс, включающий в себя следующее:
инвертирование значений сигналов от пласта, обеспечиваемых датчиком УСУД (ABR), чтобы это служило основой для инвертирования значений сигналов от пласта, обеспечиваемых антенной решеткой для глубинных измерений.
14. Способ по п. 13, дополнительно содержащий:
корректировку значений сигналов от пласта, обеспечиваемых датчиком УСУД (ABR), для влияний скважины.
15. Способ по п. 14, отличающийся тем, что при корректировке используют сигналы, обеспечиваемые индукционным датчиком, содержащим передающую антенну датчика и приемную антенну датчика, выполненные с возможностью измерения местного удельного сопротивления непосредственно перед буровым долотом.
16. Способ по п. 7, в котором инвертирование содержит:
инвертирование значений сигналов от пласта, обеспечиваемых датчиком УСУД (ABR), с инверсией границы одного слоя.
17. Способ по п. 7, в котором инвертирование содержит:
инвертирование значений сигналов от пласта, обеспечиваемых антенной решеткой для глубинных измерений, на основании абсолютных значений фазы сигналов от пласта, обеспечиваемых антенной решеткой для глубинных измерений.
18. Способ по п. 13, в котором инвертирование содержит:
инвертирование значений сигналов от пласта, обеспечиваемых тороидом, для обеспечения промежуточного значения удельного сопротивления, подлежащего преобразованию в уточненное значение удельного сопротивления путем инверсии значений сигналов от пласта, обеспечиваемых антенной решеткой для глубинных измерений.
19. Способ по п. 13, в котором получение содержит:
получение сигналов от пласта посредством совместно используемых передающих или приемных элементов антенной решетки для глубинных измерений с целью формирования сложного амплитудного коэффициента измеренной амплитуды и фазы или разности фаз.
20. Способ по п. 7, в котором антенная решетка для глубинных измерений выполнена с возможностью измерять удельное сопротивление пласта и местоположение слоев впереди долота на расстоянии, по меньшей мере, в четыре раза превышающем расстояние, на котором датчик УСУД (ABR) способен выполнять измерения удельного сопротивления пласта.
21. Машиночитаемое устройство хранения данных с хранящимися в нем командами, которые при их исполнении машиной инициируют выполнение машиной операций, заключающих в себе способ по любому из пп. 7-20.
| RU 2009114736 A, 27.10.2010 | |||
| Мартеновская печь | 1927 |
|
SU14920A1 |
| WO 2011043851 A1, 14.04.2011 | |||
| US 6958610 B2, 25.10.2005 | |||
| US 5359324, 25.10.1994 | |||
| US 20100156424 A1, 24.06.2010.. | |||

