ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение в целом относится к методикам калибровки для скважинных каротажных приборов и, более конкретно, к способу поверхностной калибровки прибора каротажа сопротивления.
УРОВЕНЬ ТЕХНИКИ
Среди всех каротажных приборов, размещаемых в стволе скважины, приборы каротажа сопротивления обеспечивают наибольшую глубину исследования. Вследствие этого их широко использовали для обнаружения границ слоев пласта в таких применениях, как спуск обсадной колонны или размещение скважины. Кроме того такие каротажные приборы применяются для получения других различных характеристик геологических пластов, через которые проходит ствол скважины, и данных, относящихся к размеру и конфигурации самого ствола скважины. Сбор информации, относящейся к скважинным условиям, обычно называемый “каротаж”, может осуществляться несколькими способами, включая кабельный каротаж и “каротаж в процессе бурения” (“LWD”).
Глубина исследования, обеспечиваемая каротажным прибором, прямо пропорциональна расстоянию между передатчиком и приемником. В результате этого большинство считывающих приборов с большой глубиной исследования имеют очень большое расстояние между ними. Например, некоторые считывающие приборы каротажа сопротивления с большой глубиной исследования могут иметь длину 15,24-30,48 м (50-100) футов, и они работают на частотах менее 8 кГц, чтобы компенсировать растущее в геометрической прогрессии затухание при больших расстояниях между передатчиком и приемником. Напротив, стандартные, приборы с меньшей глубиной исследования имеют длину около 6,096 м (20 футов), и они оптимизированы для скважинного размещения в резервуарах на расстоянии в пределах около 3,048 м (10 футов) от верхней или нижней границы породы-коллектора.
Требуемые расстояния между передатчиками и приемниками вдоль считывающих приборов с большой глубиной исследования создают проблемы при калибровке, так как большинство традиционных способов калибровки (например, с подвешиванием в воздухе, резервуаром для проведения испытаний или калибровочной печью) требуют наличия некоторого расстояния от любых близлежащих объектов, которые могут быть помехой для калибровочных измерительных сигналов. Вследствие этого непрактично применять эти традиционные методики калибровки к считывающему прибору каротажа сопротивления с большой глубиной исследования, так как чувствительный объем указанного прибора является слишком большим, и, таким образом, не представляется возможным иметь сооружения, которые являлись бы достаточно большими, чтобы полностью вмещать указанные приборы.
Следовательно, в данной области техники существует потребность в практической методике калибровки считывающего прибора каротажа сопротивления с большой глубиной исследования.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
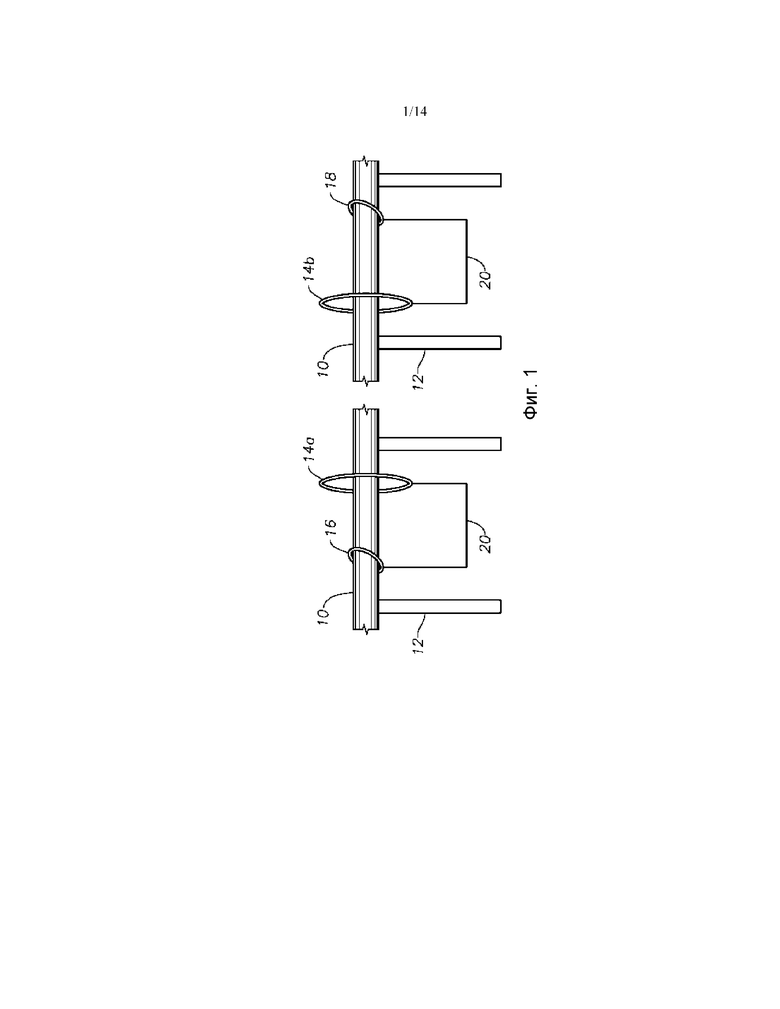
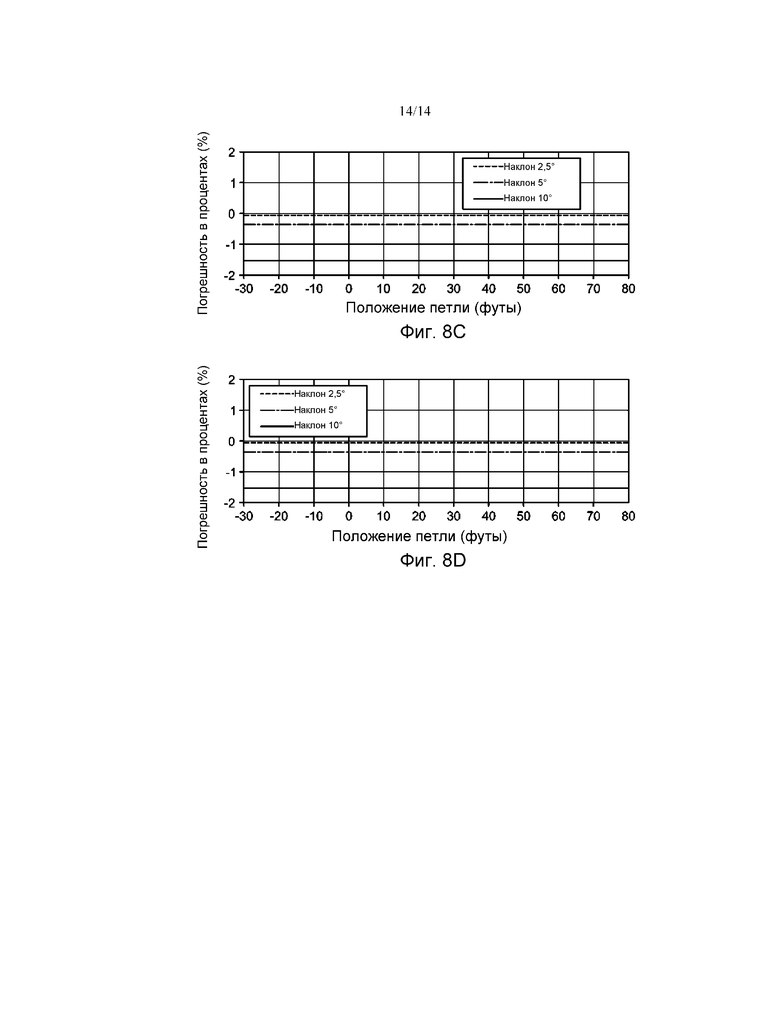
На фиг. 1 изображен расположенный на стенде каротажный прибор, который калибруют в соответствии с конкретными пояснительными способами согласно настоящему изобретению;
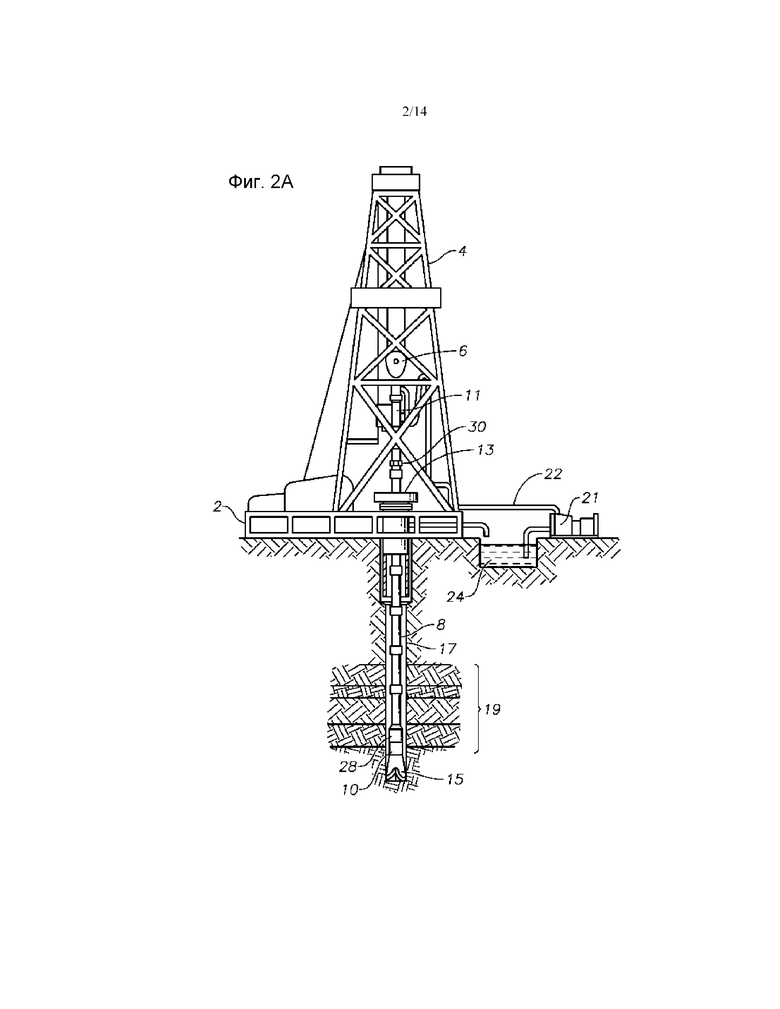
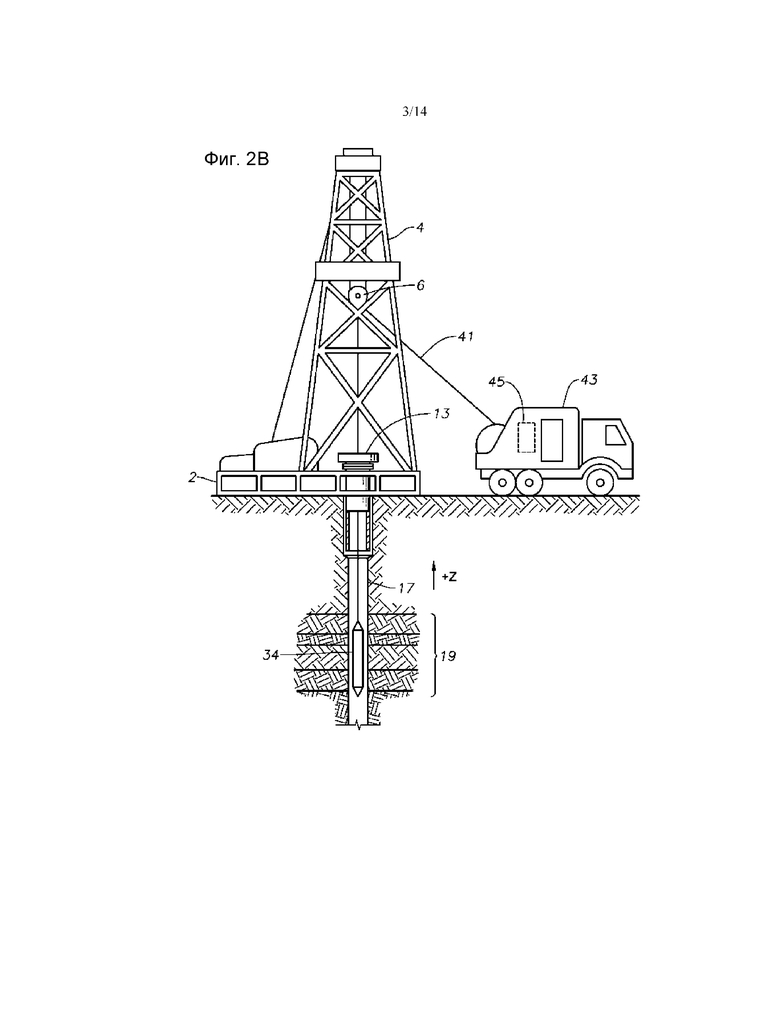
На фиг. 2A и 2B изображен прибор каротажа сопротивления, применяемый при LWD-каротаже и кабельном каротаже соответственно, в соответствии с конкретными пояснительными вариантами реализации согласно настоящему изобретению;
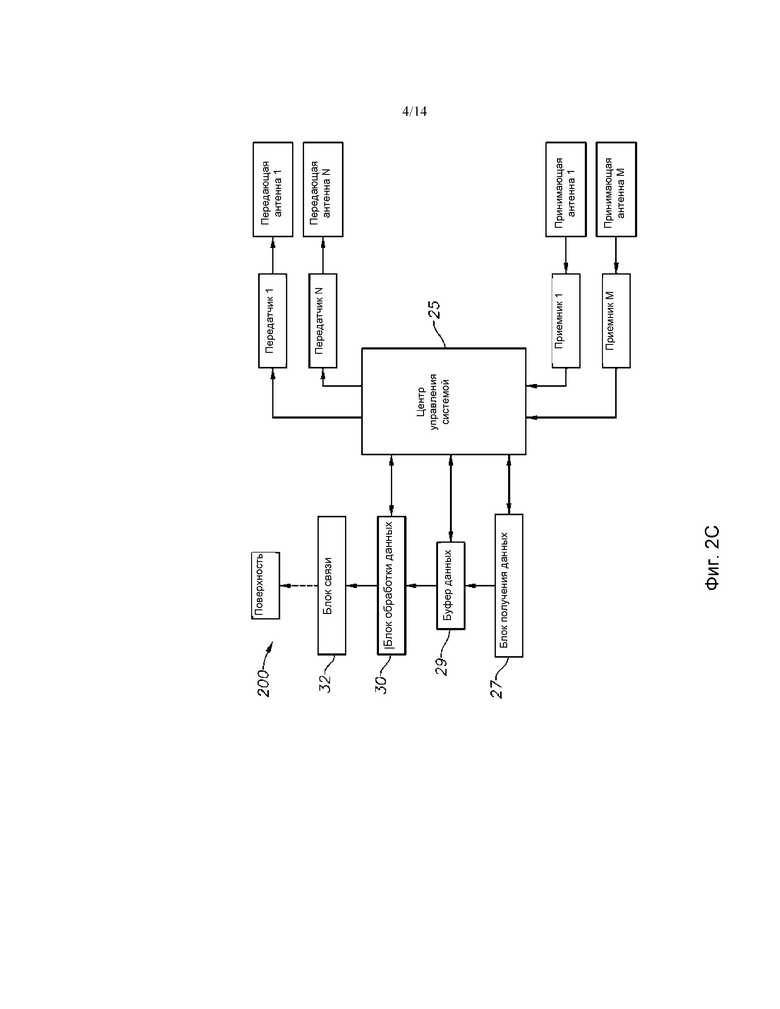
На фиг. 2C представлена структура электронной схемы, реализованной внутри каротажного прибора и необходимой для получения измерительных сигналов пласта, в соответствии с конкретными пояснительными вариантами реализации настоящего изобретения;
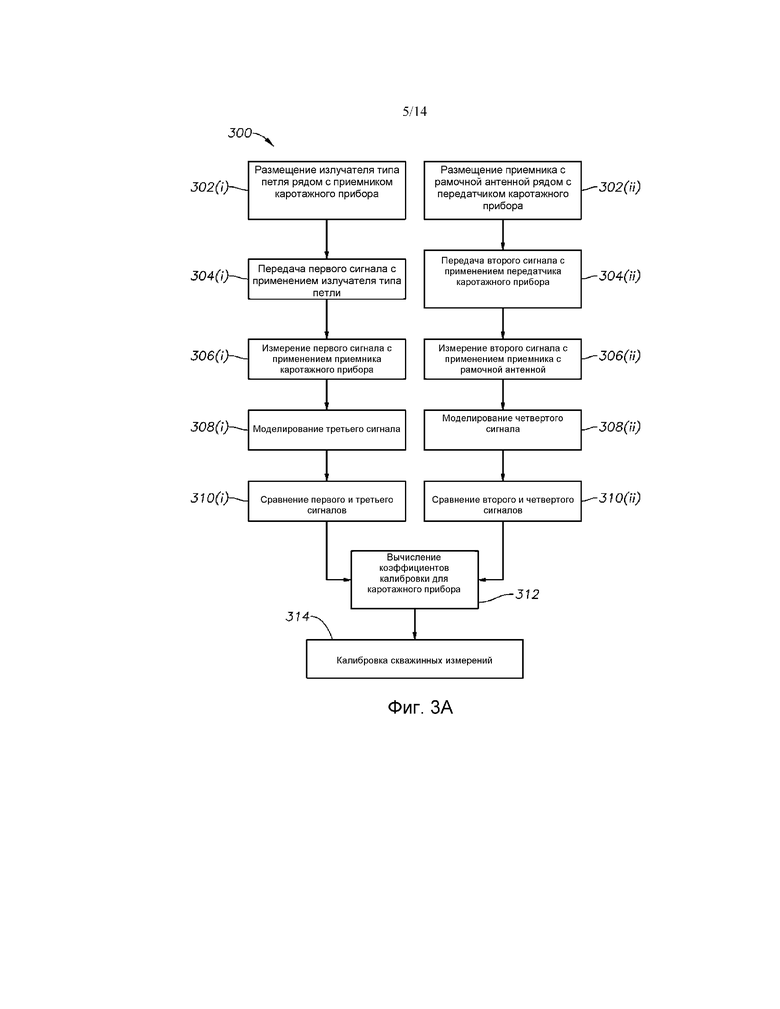
На фиг. 3A представлена блок-схема, подробно описывающая способ поверхностной калибровки в соответствии с конкретными пояснительными способами согласно настоящему изобретению;
На фиг. 3B изображена блок-схема, подробно описывающая способ поверхностной калибровки, который применяет блок 312 способа 300, чтобы вычислить коэффициенты приемников, в соответствии с одним или несколькими альтернативными пояснительными способами согласно настоящему изобретению;
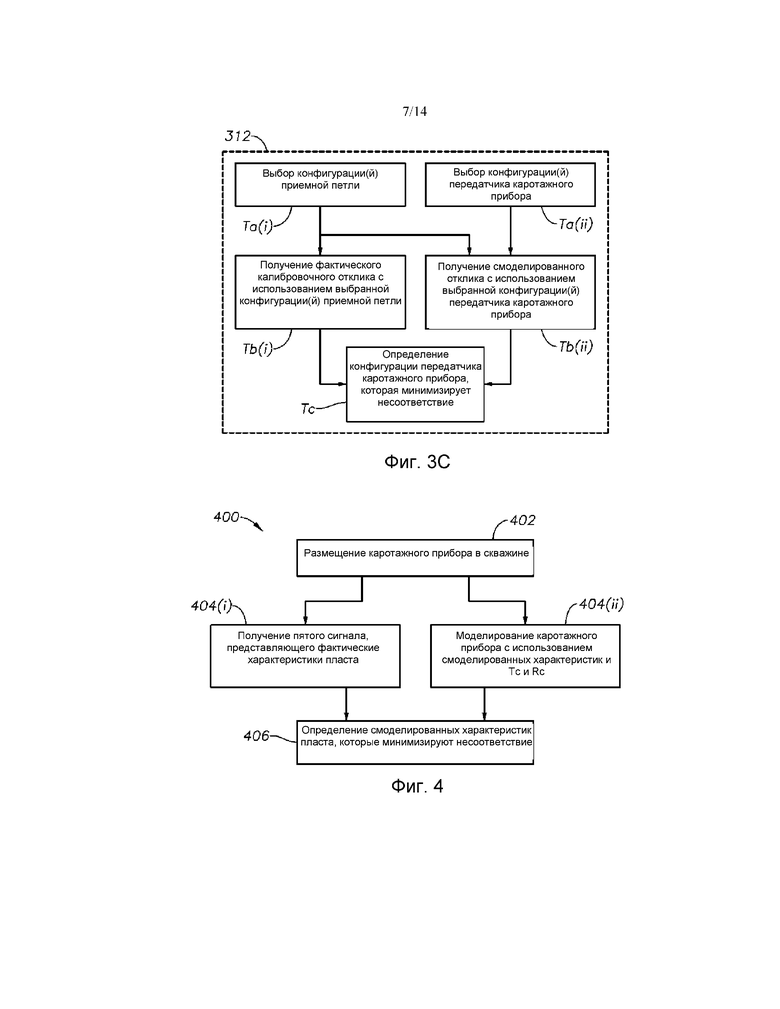
На фиг. 3C изображена блок-схема, подробно описывающая способ поверхностной калибровки, который применяет блок 312 способа 300, чтобы вычислить коэффициенты передатчиков, в соответствии с одним или несколькими альтернативными пояснительными способами согласно настоящему изобретению.
На фиг. 4 изображена блок-схема способа, подробно описывающая применение коэффициентов калибровки к моделированию, в соответствии с одним или несколькими пояснительными способами согласно настоящему изобретению;
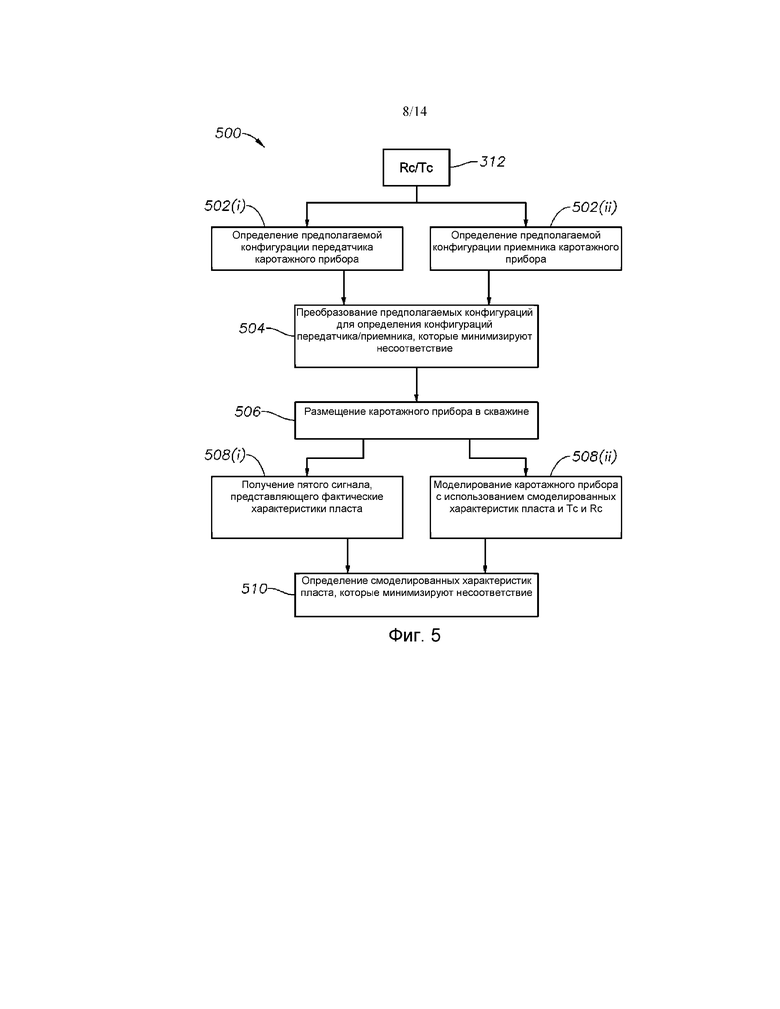
На фиг. 5 изображена блок-схема способа, подробно описывающая применение коэффициентов калибровки к фактическим измерениям, в соответствии с одним или несколькими альтернативными пояснительными способами согласно настоящему изобретению;
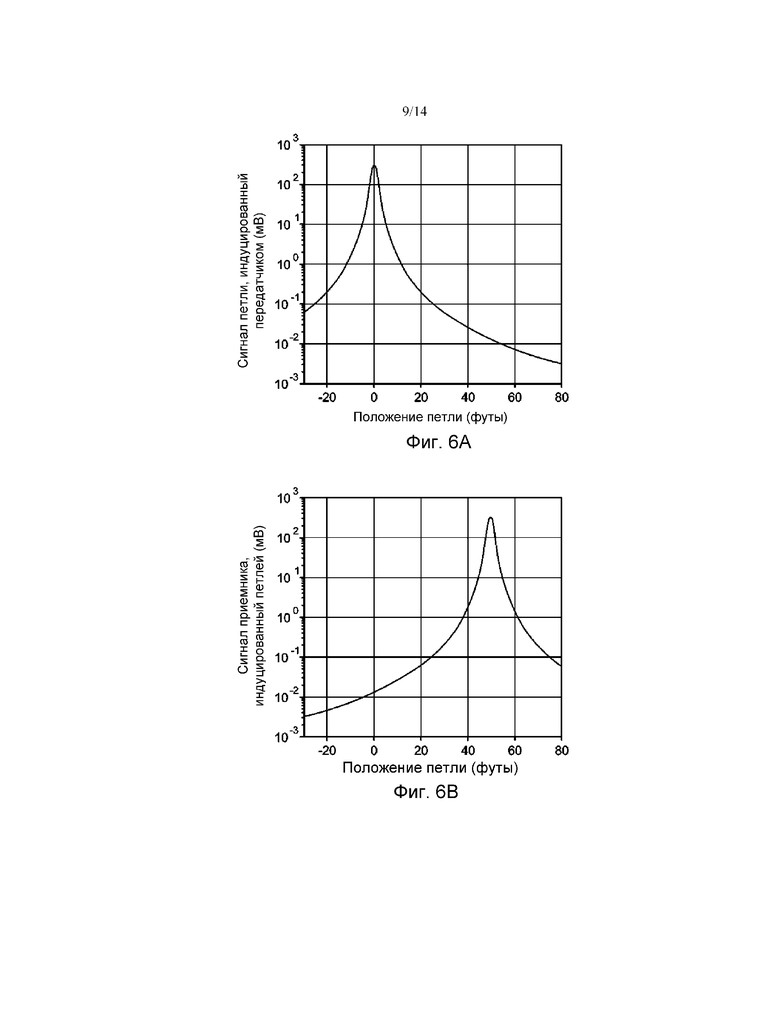
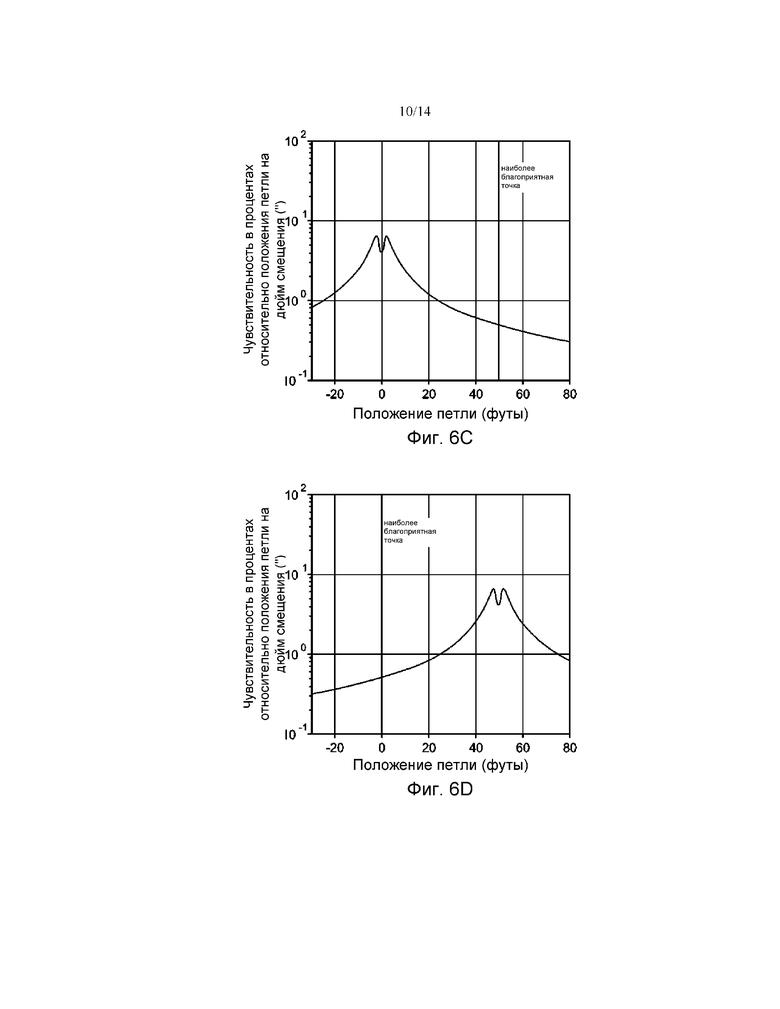
На фиг. 6A-D изображены графики A-D, которые отображают результаты моделирования для описанных здесь способов калибровки;
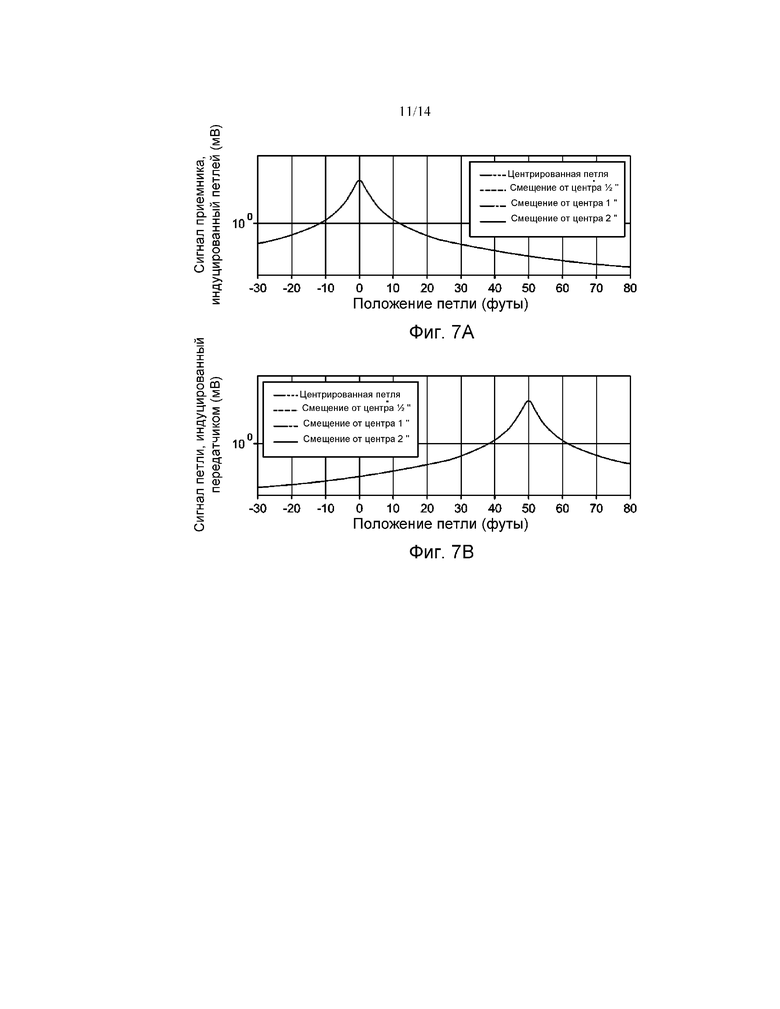
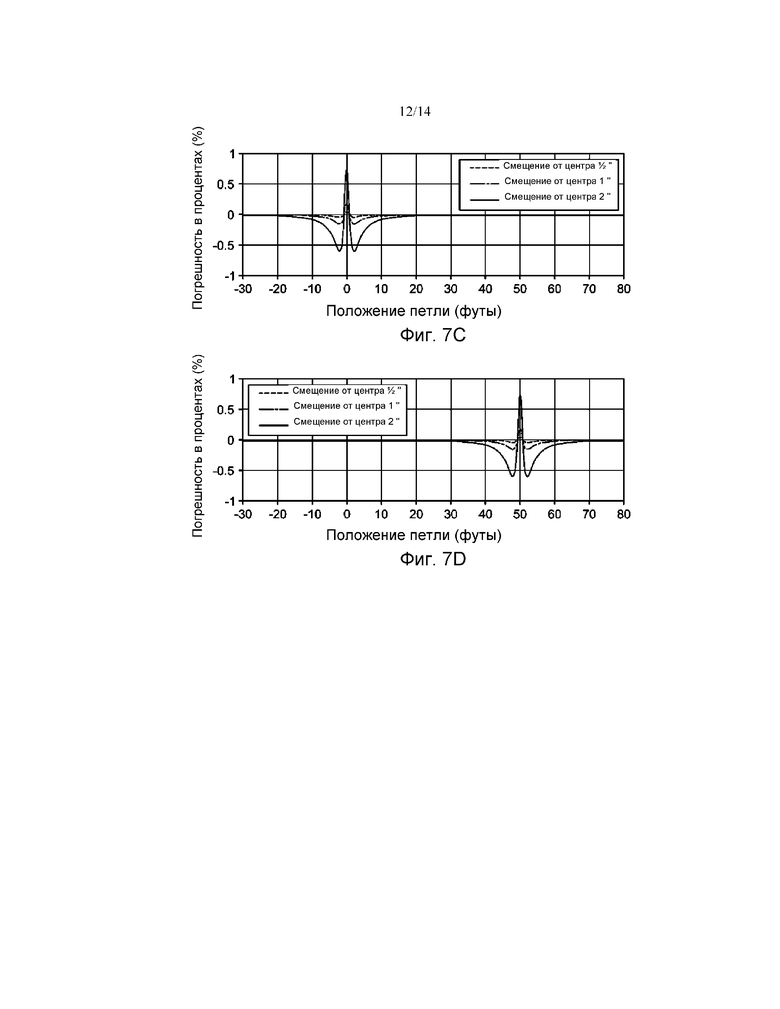
На фиг. 7A-D изображены графики, показывающие чувствительность калибровки приемника и передатчика каротажного прибора к эффектам эксцентриситета как функции положения петли, в соответствии с конкретными пояснительными вариантами реализации настоящего изобретения; и
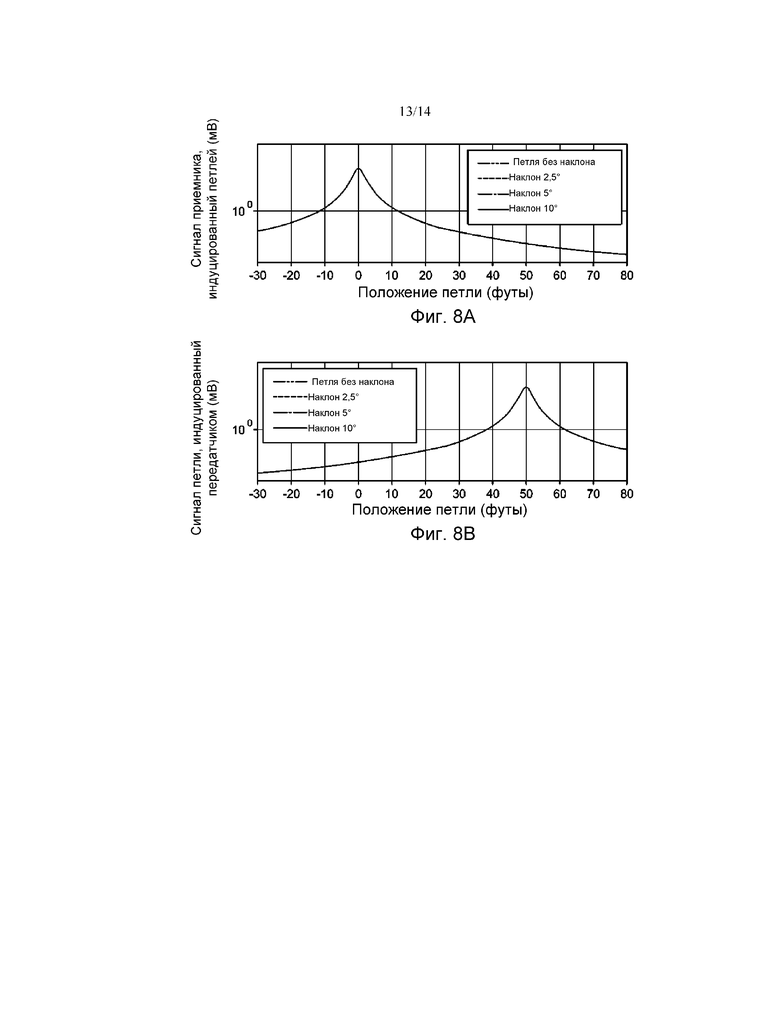
На фиг. 8A-D изображены графики, показывающие чувствительность калибровки приемника и передатчика каротажного прибора к отклонению угла наклона петли как функции положения петли, в соответствии с конкретными пояснительными вариантами реализации настоящего изобретения.
ОПИСАНИЕ ПОЯСНИТЕЛЬНЫХ ВАРИАНТОВ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
Пояснительные варианты реализации и связанные способы согласно настоящему изобретению описаны далее как обладающие возможностью применения в способе поверхностной калибровки для применения со скважинными приборами каротажа сопротивления. Для ясности в данном описании изложены не все признаки фактического варианта реализации изобретения или способа. Разумеется, следует понимать, что при разработке любого подобного фактического варианта реализации изобретения, для достижения конкретных целей разработчика, таких как соответствие связанным с системой, связанным с бизнесом ограничениям, которые будут изменяться от одного варианта реализации изобретения к другому, должны быть приняты многочисленные специальные решения в отношении реализации. Кроме того, следует понимать, что попытка разработки может быть сложной и трудоемкой, но, тем не менее будет обычной задачей для специалистов в данной области техники, использующих преимущество данного изобретения. Дополнительные аспекты и преимущества различных вариантов реализации изобретения и связанных способов согласно изобретению станут очевидными из рассмотрения следующего описания и графических материалов.
На фиг. 1 изображен расположенный на стенде каротажный прибор, который калибруют в соответствии с приведенным в качестве примера способом согласно настоящему изобретению; Как описано в данном документе, пояснительные варианты реализации настоящего изобретения описывают различные способы калибровки приборов каротажа сопротивления, проводимой на поверхности. Сначала каротажный прибор 10 располагают на стенде 12. В альтернативном варианте каротажный прибор 10 может быть подвешен или иным образом закреплен в некотором местоположении на поверхности. Петли 14 (т.е. генераторная петля 14a или приемная петля 14b) расположены рядом c приемником 16 и передатчиком 18 указанного прибора соответственно. Например, в некоторых вариантах реализации изобретения петли 14 могут быть расположены на расстоянии от 3,048 до 6,096 м (от 10 до 20 футов). В некоторых вариантах реализации изобретения для калибровки применяют отдельные внешние генераторные и приемные петли. Такой вариант реализации изобретения будет особенно удобным для прибора модульной конструкции, как показано на фиг. 1, где передатчик и приемник считывающего прибора с большой глубиной исследования расположены на физически отдельных частях трубы. Однако, настоящее изобретение также применимо к цельным каротажным приборам. Как бы то ни было, поверхностная калибровка передатчика и приемника может проводиться отдельно, что требует меньшего физического пространства и расстояния для измерений.
Как дополнительно показано на фиг. 1, с целью калибровки передатчика 18 внешняя откалиброванная приемная петля 14b размещена в непосредственной близости от передатчика 18, чтобы таким образом регистрировать сигналы, исходящие от передатчика 18. Затем измеренные сигналы сравнивают со смоделированными сигналами и, в результате сравнения, определяют коэффициенты калибровки для передатчика 18. Калибровку приемника 16 прибора выполняют подобным образом, используя излучатель типа петля 14a. В некоторых вариантах реализации изобретения синхронизация (для калибровки фазы) между передатчиком 18/приемником 16 прибора и их соответствующими приемником с рамочной антенной 14b/излучателем типа петля 14a может быть выполнена путем установления между ними линии 20 синхронизации. Линия 20 может быть проводной или беспроводной.
Затем указанный прибор размещают в скважине и выполняют измерения в отношении пласта, как показано на фиг. 2A и 2B. На фиг. 2A и 2B изображен прибор каротажа сопротивления, применяемый при LWD-каротаже и кабельном каротаже соответственно, в соответствии с конкретными пояснительными вариантами реализации согласно настоящему изобретению; Как только прибор был размещен в скважине, коэффициенты калибровки для его передатчика 18 и приемника 16, вычисленные на поверхности, применяют к фактическим сигналам, полученным в скважине, тем самым калибруя измерения. Затем калиброванный измерительный сигнал подвергают инверсии для генерирования требуемых петрофизических характеристик скважины и окружающих геологических пластов (т. е. параметров пластов), относящихся к электрическим или геологическим свойствам пласта, таким как, например, удельные электрические сопротивления пласта, расстояния или направления к границам слоя, двумерная форма границ независимого слоя или трехмерное распределение удельных электрических сопротивлений пласта. Вместо этого в альтернативном режиме применения калибровки она может быть применена к данным моделирования, которые подвергли инверсии. Таким образом, операции, связанные со стволом скважины, такие как, например, бурение, размещение скважин, спуск обсадной колонны или операции по геонавигации, могут осуществляться на основании параметров пласта.
На фиг. 2A изображена буровая платформа 2, оборудованная вышкой 4, которая поддерживает подъемник 6, предназначенный для подъема и спуска бурильной колонны 8. На подъемнике 6 подвешен верхний вращатель 11, подходящий для вращения бурильной колонны 8 и спуска ее через устье 13 скважины. К нижнему концу бурильной колонны 8 прикреплено буровое долото 15. При вращении буровое долото 15 создает ствол 17 скважины, который проходит сквозь различные пласты 19. Насос 21 обеспечивает циркуляцию бурового раствора через подающую трубу 22 на верхний вращатель 11, вниз через внутреннее пространство бурильной колонны 8, через отверстия в буровом долоте 15 и обратно на поверхность по затрубному пространству вокруг бурильной колонны 8 и в накопительную емкость 24. Буровой раствор переносит буровой шлам из забоя в емкость 24 и способствует сохранению целостности ствола скважины 16. Для бурового раствора могут быть использованы различные материалы, включая, но без ограничения, проводящий буровой раствор на основе минерализованной воды.
Каротажный прибор 10 встроен в нижнюю часть бурильной колонны возле долота 15. В этом пояснительном варианте реализации изобретения каротажный прибор 10 представляет собой LWD-прибор; однако, в других пояснительных вариантах реализации изобретения каротажный прибор 10 может быть использован при применении кабельного каротажа или каротажа со спуском посредством насосно-компрессорных труб. Каротажный прибор 10 может представлять собой, например, считывающий прибор каротажа сопротивления со сверхбольшой глубиной исследования. В альтернативном варианте приборы каротажа сопротивления с несверхбольшой глубиной исследования также могут быть использованы в одной бурильной колонне наряду со считывающим каротажным прибором с большой глубиной исследования. Иллюстративные каротажные приборы включают, например, прибор каротажа сопротивления INSITE ADR™ или систему LOGIQ ACRt™, поставляемые компанией Halliburton Energy Services. Специалистам в данной области техники, использующим преимущество данного изобретения, будет понятно, что существует множество приборов каротажа сопротивления, которые могут быть использованы в рамках настоящего изобретения. Кроме того, в конкретных пояснительных вариантах реализации изобретения каротажный прибор 10 может быть приспособлен к выполнению каротажных операций как в обсаженных, так и необсаженных скважинах. Также в некоторых вариантах реализации изобретения измерительные сигналы, используемые в процессе калибровки, могут происходить из разных скважин, предпочтительно в одной области геологической среды, в которой существует сильная связь между скважинами.
На фиг. 2A видно, как при выполнении буровым долотом 15 ствола 17 скважины в пластах 19, каротажный прибор 10 считывает измерительные сигналы, относящиеся к различным свойствам пласта, а также ориентированию прибора и другим различным условиям бурения. В некоторых вариантах реализации изобретения каротажный прибор 10 может иметь форму утяжеленной бурильной трубы, т. е. толстостенной трубы, которая обеспечивает вес и жесткость, способствующие процессу бурения. В то же время, как описано в данном документе, каротажный прибор 10 представляет собой каротажный прибор для проведения каротажа сопротивления или индукционного каротажа, предназначенный для определения геологического строения и удельного электрического сопротивления пластов. Чтобы передавать наземному приемнику 30 снимки и данные/сигналы измерений и принимать команды с поверхности, в конструкции может быть предусмотрен телеметрический подузел 28. В некоторых вариантах реализации изобретения телеметрический подузел 28 не имеет связи с поверхностью, а вместо этого сохраняет данные каротажа для последующего извлечения на поверхности, когда каротажный узел будет извлечен.
На фиг. 2A видно, что каротажный прибор 10 содержит центр управления системой (“ЦУС”), вместе с необходимой электронной схемой обработки/хранения/связи, которая связана с возможностью передачи информации с одним или несколькими датчиками (не показаны), применяемыми для получения измерительных сигналов пласта, отражающих параметры пласта. В некоторых вариантах реализации изобретения сразу после получения измерительных сигналов ЦУС калибрует измерительные сигналы и отправляет данные обратно вверх по стволу скважины и/или в другие компоненты узла через телеметрический подузел 28. В другом варианте реализации изобретения центр управления системой может быть расположен в удаленном от каротажного прибора 10 местоположении, например на поверхности или в другой скважине, и соответствующим образом выполняет обработку данных. Эти и другие изменения в рамках настоящего изобретения будут очевидны специалистам в данной области техники, использующим преимущество данного изобретения.
Каротажные датчики, используемые вдоль каротажного прибора 10, представляют собой датчики для измерения удельного электрического сопротивления, такие как, например, магнитные или электрические датчики, и могут обмениваться информацией в режиме реального времени. Приведенные в качестве примера магнитные датчики могут содержать катушечные обмотки и обмотки электромагнита, которые используют явление индукции, чтобы определять удельную проводимость геологических пластов. Приведенные в качестве примера электрические датчики могут содержать электроды, линейные проволочные антенны или тороидальные антенны, которые используют закон Ома, чтобы выполнять указанное измерение. Кроме того, датчики могут представлять собой реализации диполей с азимутальным направлением момента и направленностью, такие как антенны с наклонными катушками. Кроме того, каротажные датчики могут быть приспособлены для выполнения каротажных операций в направлениях вверх или вниз по стволу скважины. Телеметрический подузел 28 обменивается информацией с удаленным местоположением (поверхностью, например), используя, например, акустические способы, способы, применяющие импульсы давления, или электромагнитные способы, что будет понятно специалистам в данной области техники, использующим преимущество данного изобретения.
Как описано выше, каротажный прибор 10, в этом примере, представляет собой считывающий каротажный прибор для проведения каротажа сопротивления или индукционного каротажа с большой глубиной исследования. Как будет понятно специалистам в данной области техники, использующим преимущество данного изобретения, такие приборы, как правило, содержат передающие и приемные катушки, которые разнесены в осевом направлении вдоль ствола скважины. Передающие катушки генерируют в пласте переменные токи смещения, которые зависят от удельной проводимости. Переменные токи создают напряжение на приемной катушке. Помимо пути через пласт от передатчика к приемнику также существует прямой путь. В приборах для проведения индукционного каротажа сигнал от этого пути может быть исключен за счет использования компенсационной катушки с противоположной намоткой и осевым смещением. В каротажных приборах сопротивлений фаза и амплитуда комплексного напряжения могут быть измерены на конкретных рабочих частотах. В этих приборах также предусмотрена возможность измерения разности фаз и отношения амплитуд между двумя разнесенными в осевом направлении приемниками. Фазы, разности фаз, амплитуды или отношения амплитуд могут быть вычислены в результате измерений комплексных напряжений на приемниках. Кроме того, вместо измерительных сигналов частотной области могут быть использованы измерительные сигналы импульсного возбуждения и измерительные сигналы временной области. Такие измерительные сигналы могут быть преобразованы в измерения частоты посредством применения преобразования Фурье. Способы калибровки, описанные далее, применимы ко всем этим сигналам и не ограничиваются представленными примерами. В общем, применяя больший интервал пары передатчик-приемник, можно достигнуть большей глубины исследования, но может пострадать вертикальное разрешение измерительных сигналов. Таким образом, каротажный прибор 10 может использовать несколько наборов передатчиков или приемников в различных положениях вдоль ствола скважины, чтобы обеспечить возможность исследования различных глубин без чрезмерной потери в вертикальном разрешении.
На фиг. 2B изображен альтернативный вариант реализации настоящего изобретения, в соответствии с которым посредством каротажного прибора для проведения кабельного каротажа получают измерительные сигналы и осуществляют их калибровку. В различные моменты во время процесса бурения бурильная колонна 8 может быть извлечена из ствола скважины, как показано на фиг. 2B. После того, как бурильная колонна 8 была извлечена, появляется возможность осуществления каротажных операций с применением каротажного зонда 34 для проведения кабельного каротажа, т. е. прибора для скважинных исследований, подвешенного на кабеле 41, содержащем проводники для подачи питания зонду 34 и передачи телеметрических сигналов от зонда 34 на поверхность. Каротажный зонд 34 для проведения кабельного каротажа включает каротажный прибор 10 и может иметь прижимные башмаки и/или центрирующие пружины для удержания прибора около оси скважины 17 при извлечении прибора 10 вверх по стволу скважины. Каротажный зонд 34 может содержать набор датчиков, включая многозондовый прибор бокового каротажа для измерения удельного сопротивления пласта. Каротажная станция 43 регистрирует результаты измерения, полученные от каротажного зонда 34, и содержит компьютерную систему 45 для обработки и хранения результатов измерения от датчиков.
На фиг. 2С изображена структура электронной схемы 200, реализованной внутри каротажного прибора 10 (или других приборов для проведения скважинных исследований, описанных здесь, таких, например, как зонд 34) и необходимой для получения измерительных сигналов пласта, в соответствии с конкретными пояснительными вариантами реализации настоящего изобретения. каротажный прибор 10 содержит один или несколько передатчиков T1 … TN и приемников R1 … RN, и соответствующие антенны, размещенные в пазах вдоль каротажного прибора 10, которые могут включать, например, реализации магнитных диполей, таких как катушка, антенна с наклонными катушками, электромагнит и т.п. Во время каротажных операций на передающих антеннах генерируются импульсные или стационарные сигналы, которые взаимодействуют со слоем и границами слоя в непосредственной близости к каротажному прибору 10 с целью получения электрических сигналов (т. е. измерительных сигналов), которые принимаются приемниками. Используя блок 27 получения данных, центр 25 управления системой впоследствии собирает и калибрует измерительный сигнал пласта с применением способов, описанных в данном документе. Затем центр 25 управления системой записывает данные измерительного сигнала в буфер 29, применяет предварительную обработку данных (с использованием блока 30 обработки данных) с целью уменьшения требования к полосе пропускания, и затем передает данные в удаленное местоположение (например, на поверхность) с использованием блоков 32 связи (например, телеметрического подузла 28). Однако, как было описано выше, неоткалиброванные измерительные сигналы пласта могут быть переданы в удаленное местоположение, где будет проходить калибровка. Калибровка измерительных сигналов пласта может осуществляться дистанционно. Однако, в тех вариантах реализации изобретения, в которых калибровка осуществляется каротажным прибором 10, может быть улучшено время отклика, и может быть увеличена полоса пропускания телеметрического канала к другим приборам в забойном оборудовании.
Хотя это и не показано на фиг. 2С, но электронная схема 200 содержит по меньшей мере один процессор, включенный в центр 25 управления системой, и постоянное машиночитаемое устройство хранения данных, при этом все они взаимосвязаны через системную шину. Программные команды, исполняемые указанным процессором с целью осуществления пояснительных способов калибровки, описанных в данном документе, могут храниться на локальном устройстве хранения данных или некотором другом машиночитаемом носителе данных. Понятно также то, что программные команды для проведения калибровки также могут быть загружены в устройство хранения данных с CD-ROM или другого подходящего носителя данных проводными или беспроводными способами.
Кроме того, специалистам в данной области техники будет понятно, что различные аспекты настоящего изобретения на практике могут быть осуществлены с помощью конфигураций компьютерных систем, включающих портативные устройства, многопроцессорные системы, микропроцессорные или программируемые потребительские электронные устройства, миникомпьютеры, универсальные компьютеры и т.п. Настоящее изобретение допускает применение любого количество компьютерных систем и компьютерных сетей. На практике указанное изобретение может быть осуществлено в распределенных вычислительных средах, в которых задачи выполняются устройствами дистанционной обработки, которые связаны посредством сети связи. В распределенной вычислительной среде программные модули могут быть расположены как к локальном, так и удаленном компьютерном носителе данных, включающем запоминающие устройства. Таким образом, настоящее изобретение может быть реализовано с применением различного аппаратного обеспечения, программного обеспечения или их комбинаций в компьютерной системе или другой системе обработки данных.
Центр 25 управления системой дополнительно может иметь способность геологического моделирования, чтобы обеспечивать и/или передавать подземные стратиграфические визуальные представления, включающие, например, геолого-физическую расшифровку, моделирование нефтегазоносной системы, геохимический анализ, стратиграфическое формирование сетки, моделирование фаций, эффективного объема пор и петрофизических свойств. Кроме того, такая способность геологического моделирования может отвечать за моделирование траекторий скважин, шага перфорации, а также перекрестный анализ данных о фациях и пористости. Приводимые в качестве примера платформы геологического моделирования включают, например, DecisionSpace®, а также ее функциональное средство PerfWizard®, которое поставляется на рынок компанией Landmark Graphics Corporation, Хьюстон, штат Техас. Однако, специалистам в данной области техники, использующим преимущество данного изобретения, будет понятно, что с настоящим изобретением также может быть использовано множество других платформ геологического моделирования.
На фиг. 3A представлена блок-схема, подробно описывающая способ 300 поверхностной калибровки в соответствии с конкретными пояснительными способами согласно настоящему изобретению. Способ 300 представляет собой способ, обобщающий более подробные способы, которые будут описаны далее. Согласно блоку 302(i), излучатель типа петля располагают рядом с приемником каротажного прибора, например, так, как показано на фиг. 1. Согласно блоку 302(ii), приемник с рамочной антенной располагают рядом с передатчиком каротажного прибора. В некоторых пояснительных вариантах реализации излучатель типа петля отделен от приемника с рамочной антенной. Специалистам в данной области техники, использующим преимущество данного изобретения, будет понятно, что описанные в данной заявке излучатель типа петля/приемники с рамочной антенной и передатчики/приемники прибора связаны с электронной схемой, которая предоставляет сигналы возбуждения и/или возможность получения данных, необходимые для проведения процедур калибровки. Для целей следующего описания такая электронная схема будет называться центром управления системой (“ЦУС”) 25.
Согласно блоку 304(i), ЦУС 25 возбуждает генераторную петлю с целью передачи первого сигнала. Согласно блоку 304(ii), ЦУС 25 возбуждает передатчик каротажного прибора с целью передачи второго сигнала. Согласно блоку 306(i), первый сигнал измеряется приемником каротажного прибора. Согласно блоку 306(ii), второй сигнал измеряется приемником с рамочной антенной. Излучатель типа петля калибруется с помощью стабильного и известного приемника, а приемник с рамочной антенной калибруется с помощью стабильного и известного источника. Электронные схемы излучателя типа петля и приемника с рамочной антенной могут быть спроектированы как очень стабильные эталонные устройства, так как они пребывают на поверхности и не должны работать в жестких условиях эксплуатации, и они могут сохранять свою стабильность продолжительный период времени. Согласно блоку 308(i), ЦУС 25 моделирует (или имитирует) третий сигнал, в то время как, согласно блоку 308(ii), ЦУС 25 моделирует четвертый сигнал. Моделирование проводится с использованием параметров внешних условий, в которых размещена калибровочная установка, которые, как правило, являются условиями в мастерской на поверхности. Так как расстояние между передатчиками и приемниками маленькое, диапазон чувствительности измерений мал, что означает, что детали внешних условий, такие как стены мастерской, расположенные рядом верстаки, не нужно включать в модель.
Согласно блоку 310(i), ЦУС 25 сравнивает измеренный первый сигнал со смоделированным третьим сигналом. Согласно блоку 310(ii), ЦУС 25 сравнивает измеренный второй сигнал со смоделированным четвертым сигналом. Согласно блоку 312, затем, на основании сравнений согласно блокам 310(i) и 310(ii), ЦУС 25 вычисляет коэффициенты калибровки для каротажного прибора. Для достижения этого ЦУС 25 использует одну из иллюстративных описанных ниже методик калибровки для вычисления коэффициентов калибровки. Затем, согласно блоку 314, ЦУС 25 использует коэффициенты калибровки, чтобы откалибровать каротажный прибор и/или полученные измерения.
В некоторых пояснительных способах, согласно блоку 312, ЦУС 25 вычисляет коэффициенты калибровки для приемника каротажного прибора и передатчика каротажного прибора отдельно. Здесь на основании сравнения измеренного первого сигнала и смоделированного третьего сигнала ЦУС 25 вычисляет коэффициенты калибровки для приемника каротажного прибора. Кроме того, согласно блоку 312, ЦУС на основании сравнения измеренного второго сигнала и смоделированного четвертого сигнала вычисляет коэффициенты калибровки для передатчика каротажного прибора.
Снова обратимся к блоку 314, в некоторых пояснительных вариантах реализации изобретения калибровка каротажного прибора дополнительно включает размещение каротажного прибора в скважине и получение пятого сигнала (или измерения), отображающего фактическую характеристику пласта, с использованием приемника каротажного прибора. Затем пятый сигнал калибруют с использованием коэффициентов калибровки, вычисленных в блоке 312. Здесь, в одном примере, коэффициенты калибровки передатчика и приемника каротажного прибора суммируют для калибровки пятого сигнала.
Затем калиброванный пятый сигнал подвергают инверсии с целью получения требуемых параметров пласта, которые, главным образом, относятся к электрическим или геологическим свойствам пласта, таким как удельные электрические сопротивления слоев, расстояния, направление к слоям. Применяемые иллюстративные методики инверсии могут включать, например, сопоставление с эталоном, или итерационные способы, использующие справочные таблицы, или численную оптимизацию, основанную на прямом моделировании, что будет понятно специалистам в данной области техники, использующим преимущество данного изобретения. Иллюстративные параметры пласта могут включать, например, удельные сопротивления слоев, положения слоев, формы границ слоев, трехмерное распределение удельного сопротивления, угол падения, угол набегания, радиус ствола скважины, сопротивление ствола скважины, эксцентриситет или азимут большой оси поперечного сечения ствола. Кроме того, в некоторых пояснительных вариантах реализации ЦУС 25 также может выдавать калиброванный пятый сигнал(ы) различными образами, такими как, например, просто передача данных в удаленное местоположение (например, поверхность) или выдача данных в отчет или геологическую модель.
Затем на основании данных о пласте в стволе скважины могут быть выполнены различные операции. Например, могут быть приняты решения в отношении бурения, такие как решения в отношении спуска обсадной колонны, геонавигации, размещения скважин или геостопинга. В случае спуска обсадной колонны, по мере приближения забойного оборудования, с помощью которого выполняют бурение скважины, сверху к пласту-коллектору, границы пласта-коллектора обнаруживают заранее, таким образом, обеспечивая возможность направления ствола скважины в пласт-коллектор без выхода за установленные пределы. В случае размещения скважин, ствол скважины может удерживаться внутри пласта-коллектора в оптимальном положении, предпочтительно ближе к верхней части пласта-коллектора с целью увеличения добычи. В случае геостопинга, бурение может быть остановлено перед проникновением в предположительно опасную зону.
Вышеизложенный способ 300 заключает в себе общий обзор пояснительных способов согласно настоящему изобретению. Далее будут описаны более подробные альтернативные способы согласно настоящему изобретению.
На фиг. 3B изображена блок-схема, подробно описывающая способ поверхностной калибровки, который применяет блок 312 способа 300, чтобы вычислить коэффициенты приемников, в соответствии с одним или несколькими альтернативными пояснительными способами согласно настоящему изобретению. Как было описано выше, коэффициенты калибровки для приемника и передатчика каротажного прибора могут быть вычислены отдельно. В одном таком способе вычисление коэффициентов калибровки для приемника каротажного прибора подробно описывается как начинающееся согласно блоку Ra(i), где, посредством пользовательского интерфейса, ЦУС 25 дают команду выбрать одну или несколько конфигураций генераторной петли, представленных уравнением:
Li=[LPi, LTi, LAi] Ур.(1),
где LPi – положения генераторной петли вдоль каротажного прибора, LTi – углы наклона генераторной петли, и LAi – азимутальные углы генераторной петли. Здесь существует по меньшей мере две причины, по которым могут использоваться конфигурации с несколькими генераторными петлями: (i) чтобы обеспечить возможность достаточного количества измерений, направленных на определения всех неизвестных параметров конфигурации приемника; и (ii) чтобы оптимизировать чувствительность к параметрам конфигурации приемника (одно конкретное измерение может иметь чувствительность к одному параметру, но не обязательно к остальным). Отметим, что, как описано выше в способе 300, измеренный первый сигнал получают, используя выбранную конфигурацию(и) генераторной петли. Здесь отмечено, что также могут быть включены некоторые дополнительные параметры конфигурации петли, такие как, например, длина эксцентриситета петли и направление эксцентриситета петли, которые описывают, как петля смещена относительно прибора. Кроме того, для некруглой или эллиптической петли может потребоваться больше параметров. Для упрощения нижеследующее пояснение будет выполнено на основании трех выбранных параметров. Однако нижеследующее пояснение также применимо к любому набору параметров петли, которые могут быть использованы.
Согласно блоку Rb(i), посредством приведения в действие выбранного приемника каротажного прибора, ЦУС 25, используя выбранную конфигурацию(и) генераторной петли, получает фактический калибровочный отклик. Полученный в результате фактический калибровочный отклик от воздействия излучателя типа петля на приемник может быть представлен следующим образом:
Xi=REAL_LR(Li,Rj) Ур.(2).
Согласно блоку Ra(ii), ЦУС 25 снова посредством пользовательского интерфейса дают команду выбрать одну или несколько конфигураций приемника каротажного прибора Rj=[RCj, RPj, RTj, RAj], где RCj – комплексный коэффициент усиления приемника, RPj –положения приемника вдоль каротажного прибора, RTj – углы наклона приемника, и RAj – азимутальные углы приемника. Здесь может быть сделано начальное предположение о конфигурациях приемника. Поскольку приемники построены на основании предположенного идеального проекта, как правило, может быть сделано хорошее начальное предположение. Также отметим, что, как описано выше в способе 300, третий сигнал моделируют с использованием выбранной конфигурации(й) приемника.
Согласно блоку Rb(ii), ЦУС 25 моделирует выбранную в блоке Ra(i) конфигурацию(и) генераторной петли c выбранными в блоке Ra(ii) конфигурациями приемника каротажного прибора, ЦУС получает смоделированный отклик, представленный следующим уравнением:
Mi=MODEL_LR(Li,Rj) Ур.(3),
которое представляет собой аналитическую идеальную модель откликов приемника на воздействие генераторной петли. Затем, согласно блоку Rc, ЦУС 25 определяет конфигурацию приемника каротажного прибора, которая уменьшает до минимума несоответствие между фактическим (т.е. измеренным первым сигналом) и смоделированным (т.е. смоделированным третьим сигналом) откликами. Несоответствие может быть определено как сумма квадратов разности сигналов или как сумма абсолютных значений разности сигналов, что будет понятно специалистам в данной области техники, использующим преимущество данного изобретения. Таким образом, конфигурация приемника, которая уменьшает до минимума несоответствие, может быть представлена следующим уравнением: Rjs|n=argmin(sum|Xi - Mi|) Ур.(4).
Затем ЦУС 25 использует определенную конфигурацию(и) приемника каротажного прибора в качестве коэффициентов калибровки приемника. Здесь, в частности, на основании сравнения фактических измерений, полученных с применением выбранных конфигураций генераторной петли и приемника каротажного прибора, с полученным в результате моделированием, параметры конфигурации приемника каротажного прибора подвергают инверсии и получают с помощью процесса инверсии. Специалистам в данной области техники, которые используют преимущество данного изобретения, будет понятно, что существует множество методик инверсии, которые могут быть применены. В качестве примера вариации, в сумме в уравнении 4 для разных слагаемых могут быть использованы разные весовые коэффициенты.
На фиг. 3C изображена блок-схема, подробно описывающая способ поверхностной калибровки, который применяет блок 312 способа 300, чтобы вычислить коэффициенты передатчиков, в соответствии с одним или несколькими альтернативными пояснительными способами согласно настоящему изобретению. Как подробно описано далее, способ калибровки передатчика аналогичен способу калибровки приемника, представленному на фиг. 3B. Согласно блоку Ta(i), посредством пользовательского интерфейса, ЦУС 25 дают команду выбрать одну или несколько конфигураций приемной петли, представленных следующим уравнением:
Li=[LPi, LTi, LAi] Ур.(5),
где LPi – положения приемной петли вдоль каротажного прибора, LTi – углы наклона приемной петли, и LAi – азимутальные углы приемной петли. Таким образом, как описано выше в способе 300, измеренный второй сигнал получают, используя выбранную конфигурацию(и) приемной петли. Здесь отмечено, что также могут быть включены некоторые дополнительные параметры конфигурации петли, такие как, например, длина эксцентриситета петли и направление эксцентриситета петли, которые описывают, как петля смещена относительно прибора. Кроме того, для некруглой или эллиптической петли может потребоваться больше параметров. Для упрощения нижеследующее пояснение будет выполнено на основании трех выбранных параметров. Однако нижеследующее пояснение также применимо к любому набору параметров петли, которые могут быть использованы.
Согласно блоку Tb(i), посредством приведения в действие приемной петли с выбранной конфигурацией(ями), ЦУС 25, применяя передатчик каротажного прибора, получает фактический калибровочный отклик. Полученный в результате отклик Xi от воздействия передатчика на приемную петлю может быть представлен следующим уравнением:
Xi=REAL_TL(Li,Tj) Ур.(6).
Согласно блоку Ta(ii), ЦУС 25 снова посредством пользовательского интерфейса дают команду выбрать одну или несколько конфигураций передатчика каротажного прибора Tj=[TCj, TPj, TTj, TAj], где TCj – комплексный коэффициент усиления передатчика, TPj – положения передатчика вдоль каротажного прибора, TTj – углы наклона передатчика, и TAj – азимутальные углы передатчика. Здесь может быть сделано начальное предположение о конфигурациях передатчика. Поскольку передатчики построены на основании предположенного идеального проекта, как правило, может быть сделано хорошее начальное предположение. Также отметим, что, как описано выше в способе 300, четвертый сигнал моделируют с использованием выбранной конфигурации(й) приемника.
Согласно блоку Tb(ii), ЦУС 25 моделирует выбранную в блоке Ta(i) конфигурацию(и) приемной петли с выбранными в блоке Ta(ii) конфигурациями передатчика каротажного прибора, ЦУС получает смоделированный отклик Mi, представленный следующим уравнением:
Mi=MODEL_TL(Li,Tj) Ур.(7),
которое представляет собой аналитическую идеальную модель откликов на воздействие передатчика на приемную петлю. Затем, согласно блоку Tc, ЦУС 25 определяет конфигурацию передатчика каротажного прибора, которая уменьшает до минимума несоответствие между фактическим Xi (т.е. измеренным вторым сигналом) и смоделированным Mi (т.е. смоделированным четвертым сигналом) откликами, как представлено следующим уравнением:
Tjs|n=argmin(sum|Xi - Mi|) Ур.(8).
Затем ЦУС 25 использует определенную конфигурацию(и) передатчика каротажного прибора в качестве коэффициентов калибровки передатчика. Здесь на основании сравнения фактических измерений, полученных с применением выбранных конфигураций приемной петли и передатчика каротажного прибора, с полученным в результате моделированием, параметры конфигурации передатчика каротажного прибора подвергают инверсии и получают с помощью процесса инверсии.
В некоторых пояснительных вариантах реализации после того как коэффициенты калибровки как для передатчика, так и для приемника каротажного прибора были получены ЦУС 25, они могут быть сохранены в самой электронной схеме каротажного прибора или в удаленном местоположении, например, на поверхности. Затем коэффициенты калибровки применяют как описано ниже.
На фиг. 4 изображена блок-схема способа 400, подробно описывающая применение коэффициентов калибровки к моделированию, в соответствии с одним или несколькими способами согласно настоящему изобретению; После того как каротажный прибор был откалиброван (т.е. получены коэффициенты калибровки), каротажный прибор, согласно блоку 402, размещают в скважине вдоль пласта. Согласно блоку 404(i), затем ЦУС 25 приводит в действие указанный прибор и получает пятый сигнал, представляющий одну или несколько характеристик F окружающего пласта. Согласно блоку 404(ii), ЦУС 25, используя смоделированные характеристики P пласта и конфигурации передатчика и приемника, определенные ранее согласно блоку 312 (Tc, Rc), моделирует каротажный прибор, чтобы таким образом получить смоделированный шестой сигнал. При этом смоделированный шестой сигнал может быть представлен как:
S=MODEL_DOWNHOLE (P, Tjs|n, Rjs|n) Ур.(9).
Согласно блоку 406, затем ЦУС 25 итерационно определяет смоделированные параметры P пласта, которые уменьшают до минимума несоответствие между фактическим F (т.е. пятым сигналом) и смоделированным S (т.е. смоделированным шестым сигналом), как представлено следующим уравнением: Ps|n=argmin(sum|F - S|) Ур.(10).
В конечном итоге, ЦУС 25 получает смоделированные параметры как результат инверсии. Таким образом, способ 400 описывает применение коэффициентов калибровки к моделированию, в отличие от применения коэффициентов калибровки к реальным измерениям (как будет описано со ссылкой на фиг. 5). Способ 400 является простым и эффективным в применении и допускает коррекцию выходных данных инверсии. Как описано ниже, способ, показанный на фиг. 5, допускает коррекцию фактических измерений.
На фиг. 5 изображена блок-схема способа 500, подробно описывающая применение коэффициентов калибровки к фактическим измерениям, в соответствии с одним или несколькими способами согласно настоящему изобретению; После того как согласно блоку 312 были получены коэффициенты калибровки приемника и передатчика каротажного прибора, ЦУС 25 определяет (например, загружает) предполагаемые конфигурации передатчика и приемника каротажного прибора согласно блокам 502(i) и 502(ii) соответственно. Предполагаемые конфигурации представляют собой известные идеальные конфигурации, которые были заданы во время изготовления. Здесь предполагаемые конфигурации передатчиков представлены следующим уравнением:
ITj=[ITCj, ITPj, ITTj, ITAj,], Ур.(11),
где ITj – коэффициент усиления передатчика, ITPj – положения передатчика вдоль прибора, ITTj – углы наклона передатчика, и ITAj – азимутальные углы передатчика. Предполагаемые конфигурации приемника представлены следующим уравнением: IRj=[IRCj, IRPj, IRTj, IRAj] Ур.(12),
где IRCj – коэффициент усиления приемника, IRPj – положения приемника, IRTj – углы наклона приемника, и IRAj – азимутальные углы приемника. Как ранее было указано для параметров конфигурации петли, количество параметров, которые используются для параметров передатчика и приемника каротажного прибора, также может изменяться. Дальнейшее рассмотрение приведено для вышеупомянутого набора параметров, однако он может быть расширен до любого другого набора параметров. В качестве примера, число параметров может быть уменьшено за счет удаления тех параметров, которые, как предполагается, не изменяются настолько, насколько изменяются остальные, на основании конкретной механической конструкции указанного прибора.
Согласно блоку 504, ЦУС 25 преобразует предполагаемые конфигурации передатчика и приемника в конфигурации (Tc, Rc) передатчика и приемника, определенные согласно блоку 312. MAP может быть представлено следующим уравнением:
MAP(MODEL_DOWNHOLE(P, Tjs|n, Rjs|n))=MODEL_DOWNHOLE(P,ITj,IRj) Ур.(13).
Здесь ЦУС 25 вычисляет корректирующее преобразование MAP, которое преобразует фактические измерения в предполагаемые измерения. В конечном итоге, это преобразование применяется для корректировки фактических измерений пласта перед их использованием в инверсии. Затем, согласно блоку 506, каротажный прибор размещают в скважине. Согласно блоку 508(i), ЦУС 25, применяя каротажный прибор, получает пятый сигнал, представляющий фактические характеристики F пласта. Согласно блоку 508(ii), ЦУС 25, используя смоделированные характеристики P пласта и определенные конфигурации Tc, Rc передатчика и приемника, моделирует каротажный прибор, чтобы получить смоделированный шестой сигнал, как представлено следующим уравнением:
S=MODEL_DOWNHOLE (P, ITj, IRj) Ур.(14).
В результате, согласно блоку 510, ЦУС 25 определяет смоделированные характеристики P пласта, которые уменьшают до минимума несоответствие между фактическим F (т.е. пятым сигналом) и смоделированным S (т.е. смоделированным шестым сигналом) сигналами, как представлено следующим уравнением: Ps|n=argmin(sum|MAP(F) - S|) Ур.(15).
Таким образом, ЦУС 25 корректирует фактические измерения пласта перед их использованием в инверсии.
На фиг. 6A-D изображены графики, которые отображают результаты моделирования для описанных выше способов калибровки. На фиг. 6A изображен принятый сигнал на приемнике с рамочной антенной, обусловленный воздействием передатчика прибора, тогда как на фиг. 6B изображен принятый сигнал на приемнике прибора, обусловленный воздействием излучателя типа петля. Как и ожидалось, уровни сигналов очень высоки, и они уменьшаются по мере увеличения расстояния на котором проводятся измерения. В этих примерах наблюдаемые сигналы являются обнаруживаемыми на всех рассматриваемых расстояниях. На фиг. 6C и 6D изображено процентное изменение сигнала относительно положения петли на дюйм смещения. В этих примерах можно увидеть, что для точного вычисления коэффициентов калибровки может быть использовано любое положение, которое удалено на расстояние по меньшей мере 3,048 м (10 футов). В этом диапазоне образуется погрешность позиционирования менее 2% на 2,54 см (1 дюйм). Также, как показано, при условии наличия физического пространства, наиболее благоприятная для измерения точка находится на расстоянии около 15,24 м (50 футов) от датчика. При этом, чтобы получить коэффициенты калибровки, могут сравниваться одна или несколько точек вдоль графиков; однако, в идеале, должны быть использованы максимальные точки на отметке в 15,24 м (50 футов).
На фиг. 7A-D изображены графики, показывающие чувствительность калибровки приемника и передатчика каротажного прибора к эффектам эксцентриситета (т.е. смещению петли относительно центра ) как функции положения петли, в соответствии с конкретными пояснительными вариантами реализации настоящего изобретения. На фиг. 7A изображен сигнал приемника прибора, индуцированный генераторной петлей, как функция положения генераторной петли в футах, и на фиг. 7C изображена соответствующая погрешность в процентах. На фиг. 7B изображен сигнал приемной петли, индуцированный передатчиком прибора, как функция положения приемной петли в футах, и на фиг. 7D изображена соответствующая погрешность в процентах. На фиг. 7A-D видно, что даже в случае положений возле передатчика или приемника (при z=50 и z=0 футов соответственно) отклонения эксцентриситета петли создают в принятом сигнале изменение, равное менее, чем 0,6% для смещения от центра в 5,08 см (2 дюйма). Из этих результатов можно сделать вывод о том, что эксцентриситет не нужно тщательно контролировать и включать в качестве параметра в моделирование, так как погрешность можно удерживать в пределах 5,08 см (2 дюймов) эксцентриситета.
На фиг. 8A-D изображены графики, показывающие чувствительность калибровки приемника и передатчика каротажного прибора к отклонению угла наклона петли как функции положения петли, в соответствии с конкретными пояснительными вариантами реализации настоящего изобретения. На фиг. 8A изображен сигнал приемника прибора, индуцированный генераторной петлей, как функция положения генераторной петли в футах, и на фиг. 8C изображена соответствующая погрешность в процентах. На фиг. 8B изображен сигнал приемной петли, индуцированный передатчиком прибора, как функция положения приемной петли в футах, и на фиг. 8D изображена соответствующая погрешность в процентах. На указанной фигуре можно увидеть, что погрешность во всех положениях петли одинакова, и она меньше 0,5% для 5-градусной погрешности угла наклона петли. Из этих результатов можно сделать вывод о том, что угол наклона не нужно тщательно контролировать и включать в качестве параметра в моделирование, так как погрешность можно удерживать в пределах 5 градусов угла наклона.
Кроме того, в отношении калибровки угла наклона передатчика и приемника каротажного прибора следует упомянуть о том, что считывающие приборы с большой глубиной исследования могут содержать наклонные передатчики и наклонные приемники, и сигналы, которые они принимают, являются очень чувствительными к углам наклона и точной геометрии паза, внутри которого они установлены. По этой причине описанные в данном документе способы также могут применяться для оказания содействия в регулировке углов наклона. В этом случае в любом из описанных выше способов измерения могут быть выполнены в некотором множестве положений, и может быть получена кривая измеренного напряжения как функция положения петли/передатчика/приемника. Затем эту кривую можно сравнить со смоделированными кривыми для разных углов наклона. Наконец, для антенны может быть найден и откорректирован эффективный угол наклона.
В некоторых других пояснительных вариантах реализации настоящего изобретения способы, описанные здесь, могут сочетаться с “тепловыми испытаниями”, в соответствии с которыми каротажный прибор нагревают и проводят измерения, чтобы определить изменение характеристик указанного прибора в зависимости от температуры. В этих вариантах реализации изобретения при разных температурах могут быть вычислены разные коэффициенты калибровки, и калибровка может быть скорректирована на основании температуры.
Варианты реализации изобретения, описанные в данном документе, дополнительно относятся к любому одному или нескольким из следующих пунктов:
1. Способ поверхностной калибровки скважинного каротажного прибора, включающий: расположение излучателя типа петля рядом с приемником каротажного прибора; расположение приемника с рамочной антенной рядом с передатчиком каротажного прибора, при этом излучатель типа петля отделен от приемника с рамочной антенной; передачу первого сигнала с применением излучателя типа петля; измерение первого сигнала с применением приемника каротажного прибора; передачу второго сигнала с применением передатчика каротажного прибора; измерение второго сигнала с применением приемника с рамочной антенной; моделирование третьего и четвертого сигнала; сравнение измеренного первого сигнала со смоделированным третьим сигналом; сравнение измеренного второго сигнала со смоделированным четвертым сигналом; вычисление коэффициентов калибровки для каротажного прибора, основанных на сравнении измеренного первого сигнала и смоделированного третьего сигнала и сравнении измеренного второго сигнала и смоделированного четвертого сигнала; и калибровку каротажного прибора с использованием коэффициентов калибровки.
2. Способ по пункту 1, отличающийся тем, что вычисление коэффициентов калибровки дополнительно включает: вычисление коэффициентов калибровки для приемника каротажного прибора, основанных на сравнении измеренного первого сигнала и смоделированного третьего сигнала; и вычисление коэффициентов калибровки для передатчика каротажного прибора, основанных на сравнении измеренного второго сигнала и смоделированного четвертого сигнала.
3. Способ по любому из пунктов 1-2, отличающийся тем, что калибровка каротажного прибора дополнительно включает: размещение каротажного прибора в скважине; получение пятого сигнала, представляющего характеристику пласта, с применением приемника каротажного прибора; и калибровку пятого сигнала с использованием коэффициентов калибровки.
4. Способ по любому из пунктов 1-3, отличающийся тем, что калибровка пятого сигнала дополнительно включает: суммирование коэффициентов калибровки передатчика с коэффициентами калибровки приемника; и использование комбинированных коэффициентов калибровки для калибровки пятого сигнала.
5. Способ по любому из пунктов 1-4, отличающийся тем, что измеренный первый и второй сигналы являются калиброванными.
6. Способ по любому из пунктов 1-5, отличающийся тем, что вычисление коэффициентов калибровки для приемника каротажного прибора дополнительно включает: выбор конфигурации генераторной петли, соответствующей по меньшей мере одному из следующего: положению генераторной петли вдоль каротажного прибора; углу наклона генераторной петли; или азимутальному углу генераторной петли, при этом измеренный первый сигнал получен с использованием выбранной конфигурации генераторной петли; выбор конфигурации приемника, соответствующий по меньшей мере одному из следующего: коэффициенту усиления приемника; положению приемника вдоль каротажного прибора; углу наклона приемника; или азимутальному углу приемника, при этом третий сигнал смоделирован с использованием выбранной конфигурации приемника; и определение конфигурации приемника, которая уменьшает до минимума несоответствие между измеренным первым сигналом и смоделированным третьим сигналом, при этом определенная конфигурация приемника представляет собой коэффициенты калибровки для приемника.
7. Способ по любому из пунктов 1-6, отличающийся тем, что вычисление коэффициентов калибровки для передатчика каротажного прибора дополнительно включает: выбор конфигурации приемной петли, соответствующей по меньшей мере одному из следующего: положению приемной петли вдоль каротажного прибора; углу наклона приемной петли; или азимутальному углу приемной петли, при этом измеренный второй сигнал получен с использованием выбранной конфигурации приемной петли; выбор конфигурации передатчика, соответствующей по меньшей мере одному из следующего: коэффициенту усиления передатчика; положению передатчика вдоль каротажного прибора; углу наклона передатчика; или азимутальному углу передатчика, при этом четвертый сигнал смоделирован с использованием выбранной конфигурации передатчика; и определение конфигурации передатчика, которая уменьшает до минимума несоответствие между измеренным вторым сигналом и смоделированным четвертым сигналом, при этом определенная конфигурация передатчика представляет собой коэффициенты калибровки для передатчика.
8. Способ по любому из пунктов 1-7, дополнительно включающий: размещение каротажного прибора в скважине; получение пятого сигнала, представляющего фактическую характеристику пласта, с применением приемника каротажного прибора; моделирование каротажного прибора с использованием смоделированных характеристик пласта и определенных конфигураций передатчика и приемника, которые уменьшают до минимума несоответствия, чтобы посредством этого получить смоделированный шестой сигнал; и определение смоделированных характеристик пласта, которые уменьшают до минимума несоответствие между пятым сигналом и смоделированным шестым сигналом.
9. Способ по любому из пунктов 1-7, дополнительно включающий: определение предполагаемой конфигурации передатчика для передатчика каротажного прибора, при этом предполагаемая конфигурация передатчика включает по меньшей мере одно из следующего: коэффициент усиления передатчика; положение передатчика вдоль каротажного прибора; угол наклона передатчика; или азимутальный угол передатчика; определение предполагаемой конфигурации приемника для приемника каротажного прибора, при этом предполагаемая конфигурация приемника включает по меньшей мере одно из следующего: коэффициент усиления приемника; положение приемника вдоль каротажного прибора; угол наклона приемника; или азимутальный угол приемника; преобразование предполагаемых конфигураций передатчика и приемника в определенные конфигурации передатчика и приемника, которые уменьшают до минимума несоответствия; размещение каротажного прибора в скважине; получение пятого сигнала, представляющего фактическую характеристику пласта, с применением приемника каротажного прибора; моделирование каротажного прибора с использованием смоделированных характеристик пласта и определенных конфигураций передатчика и приемника, которые уменьшают до минимума несоответствия, чтобы посредством этого получить смоделированный шестой сигнал; и определение смоделированных характеристик пласта, которые уменьшают до минимума несоответствие между пятым сигналом и смоделированным шестым сигналом.
10. Способ поверхностной калибровки скважинного каротажного прибора, включающий: размещение излучателя типа петля и приемника с рамочной антенной вдоль каротажного прибора в некотором местоположении на поверхности; приведение в действие приемника каротажного прибора и передатчика каротажного прибора, каждый из которых образует часть каротажного прибора; передачу сигналов с применением излучателя типа петля и передатчика каротажного прибора; измерение переданных сигналов с применением приемника с рамочной антенной и приемника каротажного прибора; сравнение измеренных сигналов со смоделированными сигналами; вычисление коэффициентов калибровки для каротажного прибора, основанных на указанном сравнении; и калибровку каротажного прибора с использованием коэффициентов калибровки.
11. Способ по пункту 10, отличающийся тем, что вычисление коэффициентов калибровки дополнительно включает: вычисление коэффициентов калибровки передатчика каротажного прибора, основанных на сравнении; и вычисление коэффициентов калибровки приемника каротажного прибора, основанных на сравнении.
12. Способ по любому из пунктов 10-11, дополнительно включающий: размещение каротажного прибора в скважине; получение сигнала, представляющего фактическую характеристику пласта, с применением каротажного прибора; и калибровку полученного сигнала с использованием коэффициентов калибровки.
13. Способ по любому из пунктов 10-12, отличающийся тем, что смоделированные сигналы моделируют с использованием по меньшей мере одного из следующего: конфигурации приемника каротажного прибора или конфигурации передатчика каротажного прибора.
14. Способ по любому из пунктов 10-13, отличающийся тем, что конфигурации приемника и передатчика каротажного прибора включают по меньшей мере одно из следующего: коэффициент усиления передатчика или приемника; положение передатчика или приемника вдоль каротажного прибора; угол наклона передатчика или приемника; или азимутальный угол передатчика или приемника.
15. Способ по любому из пунктов 1-14, дополнительно включающий: нагрев каротажного прибора; и вычисление коэффициентов калибровки как функции температуры.
16. Способ по любому из пунктов 1-14, отличающийся тем, что каротажный прибор представляет собой прибор каротажа сопротивления с большой глубиной исследования.
17. Способ по любому из пунктов 1-14, отличающийся тем, что каротажный прибор образует часть каротажного узла для проведения каротажа в процессе бурения или кабельного каротажа.
Кроме того, любой из способов, описанных в данном документе, может быть реализован в системе, содержащей электронную схему обработки данных, с целью осуществления любого из способов, или в компьютерном программном продукте, включающем команды, исполнение которых по меньшей мере одним процессором приводит к выполнению указанным процессором любого из способов, описанных в данном документе.
Несмотря на то, что были показаны и описаны различные варианты реализации изобретения и способы, изобретение не ограничивается этими вариантами реализации изобретения и способами и должно пониматься как включающее все модификации и изменения, которые будут очевидны специалисту в данной области техники. Таким образом, следует понимать, что изобретение не предназначено быть ограниченным конкретными раскрытыми формами. Наоборот, изобретение охватывает все модификации, эквиваленты и альтернативы, попадающие в рамки сущности и объема изобретения, как определено в прилагаемой формуле изобретения.

Изобретение относится к поверхностной калибровке каротажного прибора. Сущность: размещают излучатель типа петля и приемника с рамочной антенной вдоль каротажного прибора в некотором местоположении на поверхности, причем излучатель типа петля отделен от приемника с рамочной антенной. Приводят в действие приемник каротажного прибора и передатчик каротажного прибора, каждый из которых образует часть каротажного прибора. Передают сигналы с применением излучателя типа петля и передатчика каротажного прибора. Измеряют сигналы с применением приемника с рамочной антенной и приемника каротажного прибора. Сравнивают измеренные сигналы со смоделированными сигналами. Определяют конфигурации каротажного прибора, основанные на указанном сравнении. Калибруют каротажный прибор с использованием определенной конфигурации. 4 н. и 15 з.п. ф-лы, 21 ил.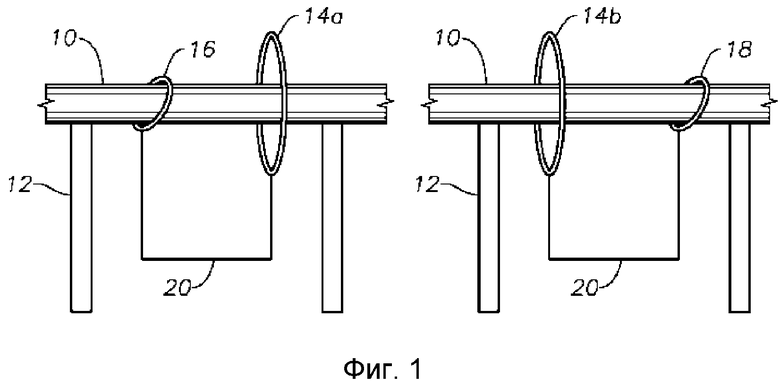
1. Способ поверхностной калибровки скважинного каротажного прибора, включающий:
расположение излучателя типа петля рядом с приемником каротажного прибора;
расположение приемника с рамочной антенной рядом с передатчиком каротажного прибора, при этом излучатель типа петля отделен от приемника с рамочной антенной;
передачу первого сигнала с применением излучателя типа петля; измерение первого сигнала с применением приемника каротажного прибора;
передачу второго сигнала с применением передатчика каротажного прибора; измерение второго сигнала с применением приемника с рамочной антенной; моделирование третьего и четвертого сигнала;
сравнение измеренного первого сигнала со смоделированным третьим сигналом;
сравнение измеренного второго сигнала со смоделированным четвертым сигналом;
определение конфигурации каротажного прибора, основанной на сравнении измеренного первого сигнала и смоделированного третьего сигнала и сравнении измеренного второго сигнала и смоделированного четвертого сигнала; и
калибровку каротажного прибора с использованием определенной конфигурации каротажного прибора.
2. Способ по п. 1, отличающийся тем, что определение конфигурации каротажного прибора дополнительно включает: определение конфигурации для приемника каротажного прибора, основанной на сравнении измеренного первого сигнала и смоделированного третьего сигнала; и
определение конфигурации для передатчика каротажного прибора, основанной на сравнении измеренного второго сигнала и смоделированного четвертого сигнала.
3. Способ по п. 1, отличающийся тем, что калибровка каротажного прибора дополнительно включает: размещение каротажного прибора в скважине;
получение пятого сигнала, представляющего характеристику пласта, с применением приемника каротажного прибора; и
калибровку пятого сигнала с использованием определенной конфигурации.
4. Способ по п. 3, отличающийся тем, что калибровка пятого сигнала дополнительно включает: объединение определенной конфигурации передатчика с определенной конфигурацией приемника и
использование объединенных конфигураций для калибровки пятого сигнала.
5. Способ по п. 1, отличающийся тем, что измеренный первый и второй сигналы являются калиброванными.
6. Способ по п. 1, отличающийся тем, что определение конфигурации для приемника каротажного прибора дополнительно включает: выбор конфигурации генераторной петли, соответствующей по меньшей мере одному из следующего:
положению генераторной петли вдоль каротажного прибора;
углу наклона генераторной петли или
азимутальному углу генераторной петли, при этом измеренный первый сигнал получен с использованием выбранной конфигурации генераторной петли;
выбор конфигурации приемника, соответствующий по меньшей мере одному из следующего:
коэффициенту усиления приемника;
положению приемника вдоль каротажного прибора;
углу наклона приемника или
азимутальному углу приемника, при этом третий сигнал смоделирован с использованием выбранной конфигурации приемника; и
определение конфигурации приемника, которая уменьшает до минимума несоответствие между измеренным первым сигналом и смоделированным третьим сигналом.
7. Способ по п. 1, отличающийся тем, что определение конфигурации для передатчика каротажного прибора дополнительно включает: выбор конфигурации приемной петли, соответствующей по меньшей мере одному из следующего:
положению приемной петли вдоль каротажного прибора;
углу наклона приемной петли или
азимутальному углу приемной петли, при этом измеренный второй сигнал получен с использованием выбранной конфигурации приемной петли;
выбор конфигурации передатчика, соответствующей по меньшей мере одному из следующего:
коэффициенту усиления передатчика;
положению передатчика вдоль каротажного прибора;
углу наклона передатчика или
азимутальному углу передатчика, при этом четвертый сигнал смоделирован с использованием выбранной конфигурации передатчика; и определение конфигурации передатчика, которая уменьшает до минимума несоответствие между измеренным вторым сигналом и смоделированным четвертым сигналом.
8. Способ по п. 6, дополнительно включающий: размещение каротажного прибора в скважине;
получение пятого сигнала, представляющего фактическую характеристику пласта, с применением приемника каротажного прибора;
моделирование каротажного прибора с использованием смоделированных характеристик пласта и определенных конфигураций передатчика и приемника, которые уменьшают до минимума несоответствия, чтобы посредством этого получить смоделированный шестой сигнал; и
определение смоделированных характеристик пласта, которые уменьшают до минимума несоответствие между пятым сигналом и смоделированным шестым сигналом.
9. Способ по п. 6, дополнительно включающий: определение предполагаемой конфигурации передатчика для передатчика каротажного прибора, при этом предполагаемая конфигурация передатчика включает по меньшей мере одно из следующего:
коэффициент усиления передатчика;
положение передатчика вдоль каротажного прибора;
угол наклона передатчика или
азимутальный угол передатчика;
определение предполагаемой конфигурации приемника для приемника каротажного прибора, при этом предполагаемая конфигурация приемника включает по меньшей мере одно из следующего: коэффициент усиления приемника;
положение приемника вдоль каротажного прибора;
угол наклона приемника или
азимутальный угол приемника;
преобразование предполагаемых конфигураций передатчика и приемника в определенные конфигурации передатчика и приемника, которые уменьшают до минимума несоответствия;
размещение каротажного прибора в скважине;
получение пятого сигнала, представляющего фактическую характеристику пласта, с применением приемника каротажного прибора;
моделирование каротажного прибора с использованием смоделированных характеристик пласта и определенных конфигураций передатчика и приемника, которые уменьшают до минимума несоответствия, чтобы посредством этого получить смоделированный шестой сигнал; и
определение смоделированных характеристик пласта, которые уменьшают до минимума несоответствие между пятым сигналом и смоделированным шестым сигналом.
10. Способ поверхностной калибровки скважинного каротажного прибора, включающий:
размещение излучателя типа петля и приемника с рамочной антенной вдоль каротажного прибора в некотором местоположении на поверхности, причем излучатель типа петля отделен от приемника с рамочной антенной,
приведение в действие приемника каротажного прибора и передатчика каротажного прибора, каждый из которых образует часть каротажного прибора;
передачу сигналов с применением излучателя типа петля и передатчика каротажного прибора;
измерение переданных сигналов с применением приемника с рамочной антенной и приемника каротажного прибора;
сравнение измеренных сигналов со смоделированными сигналами;
определение конфигурации каротажного прибора, основанной на указанном сравнении; и
калибровку каротажного прибора с использованием определенной конфигурации.
11. Способ по п. 10, отличающийся тем, что определение конфигурации дополнительно включает:
определение конфигурации передатчика каротажного прибора, основанной на сравнении; и
определение конфигурации приемника каротажного прибора, основанной на сравнении.
12. Способ по п. 10, дополнительно включающий: размещение каротажного прибора в скважине;
получение сигнала, представляющего фактическую характеристику пласта, с применением каротажного прибора и
калибровку полученного сигнала с использованием определенной конфигурации.
13. Способ по п. 10, отличающийся тем, что смоделированные сигналы моделируют с использованием по меньшей мере одного из следующего: конфигурации приемника каротажного прибора или конфигурации передатчика каротажного прибора.
14. Способ по п. 13, отличающийся тем, что конфигурации приемника и передатчика каротажного прибора включают по меньшей мере одно из следующего: коэффициент усиления передатчика или приемника;
положение передатчика или приемника вдоль каротажного прибора;
угол наклона передатчика или приемника или
азимутальный угол передатчика или приемника.
15. Способ по п. 1, дополнительно включающий: нагрев каротажного прибора и
определение конфигурации как функции температуры.
16. Способ по п. 1, отличающийся тем, что каротажный прибор представляет собой прибор каротажа сопротивления с большой глубиной исследования.
17. Способ по п. 1, отличающийся тем, что каротажный прибор образует часть каротажного узла для проведения каротажа в процессе бурения или кабельного каротажа.
18. Система, содержащая электронную схему обработки данных для осуществления любого из способов по пп. 1-17.
19. Компьютерно-читаемый носитель данных, содержащий команды, сохраненные на нем, исполнение которых по меньшей мере одним процессором приводит к выполнению указанным процессором любого из способов по пп. 1-17.
| US 7414391 B2, 19.08.2008 | |||
| US 4876511, 24.10.1989 | |||
| US 20080197851 A9, 21.08.2008 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБКИ ЗОНДА ДЛЯ ПРИБОРА НА ОСНОВЕ ИНДУКЦИИ ИЛИ РАСПРОСТРАНЕНИЯ С ПОПЕРЕЧНЫМИ ИЛИ ТРЕХОСНЫМИ МАССИВАМИ | 2004 |
|
RU2401442C2 |

