УРОВЕНЬ ТЕХНИКИ
Знания о структуре и характеристиках геологических формаций могут повысить эффективность нефтепромысловых работ, таких как бурение скважины, ее заканчивание и добыча продукции. В прошлом оценка, моделирование или прогнозирование характеристик таких формаций выполнялись до вскрытия пласта. Однако фактические характеристики той или иной части пласта до вхождения бурового долота в эту часть пласта, как правило, не известны. Следовательно, бурильщики в подобных обстоятельствах до вхождения бурового долота в пласт не могут эффективно принимать активные или заблаговременные решения на основании предвидения фактических характеристик пласта. Управление текущими операциями каротажа во время бурения (КВБ) или кабельного каротажа представляет собой сложную задачу, на которую влияют факторы, включающие ограничения по пропускной способности канала передачи данных между скважинным прибором и наземной системой управления, ограничения по точности измерений, ограничения по обработке данных и ограничения по интерпретации данных.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
В данной заявке соответственно раскрываются различные способы и системы настройки рабочего процесса для проведения текущих каротажных работ.
На Фиг. 1 показана блок-схема иллюстративной каротажной системы.
На Фиг. 2A показана блок-схема иллюстративных компонентов каротажного прибора.
На Фиг. 2B показан иллюстративный контроллер каротажного прибора.
На Фиг. 3 иллюстрируются компоненты варианта реализации прибора каротажа во время бурения (КВБ).
На Фиг. 4 иллюстрируются компоненты варианта реализации инструмента, спускаемого в скважину на тросе.
На Фиг. 5 показана блок-схема элементов иллюстративной каротажной системы, связанных с управлением рабочим процессом каротажа.
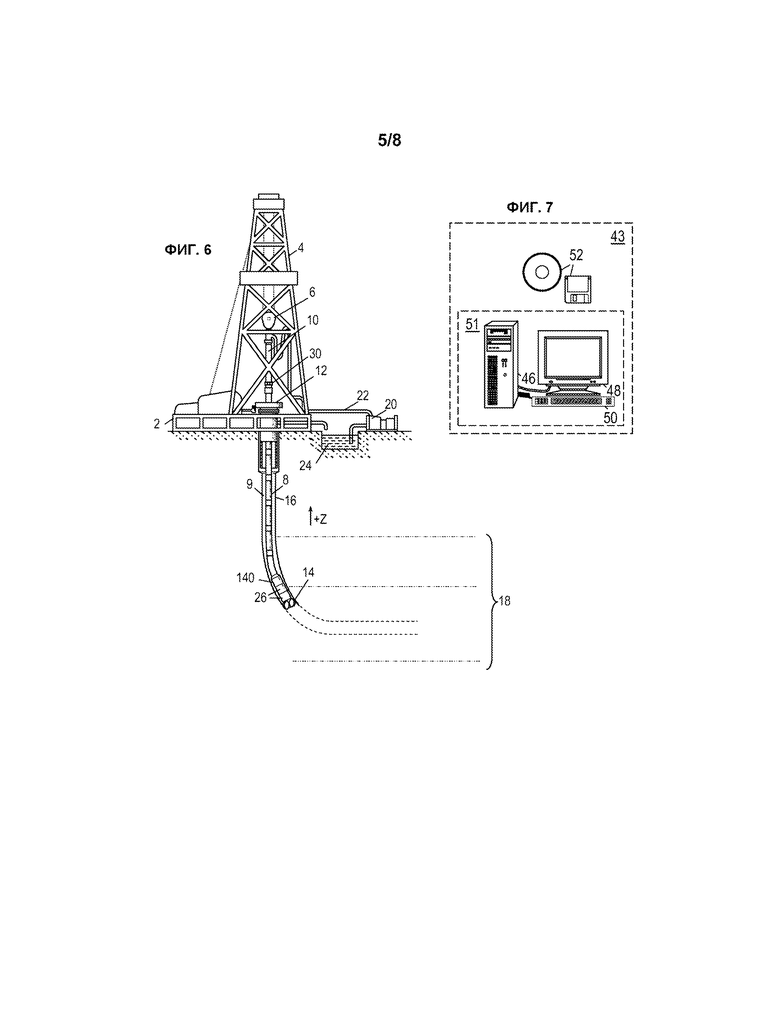
На Фиг. 6 показана иллюстративная производственная среда КВБ.
На Фиг. 7 показана блок-схема иллюстративной компьютерной системы.
На Фиг. 8 показана иллюстративная производственная среда кабельного каротажа.
На Фиг. 9 иллюстрируются различные параметры, исследуемые каротажным прибором в подземной производственной среде.
Фиг. 10-12 представляют собой технологические схемы способов иллюстративной настройки рабочего процесса для текущих каротажных работ.
ПОДРОБНОЕ ОПИСАНИЕ
В данной заявке раскрыты способы и системы управления рабочим процессом каротажа с использованием механизма адаптивного обучения, применяемого в забое и(или) на поверхности. Действия механизма адаптивного обучения могут быть основаны на собранных измерениях, данных, вводимых оператором и(или) на правилах автоматизации. Методы управления рабочим процессом каротажа, описываемые в данной заявке, применяются к текущим каротажным работам. В контексте данной заявки термин “текущие каротажные работы” относится к последовательности каротажных работ в стволе скважины. Рабочий процесс каротажа может настраиваться для каждого этапа последовательности каротажных работ. Такие настройки могут приближаться к настройкам в режиме реального времени, однако не сводятся только к ним.
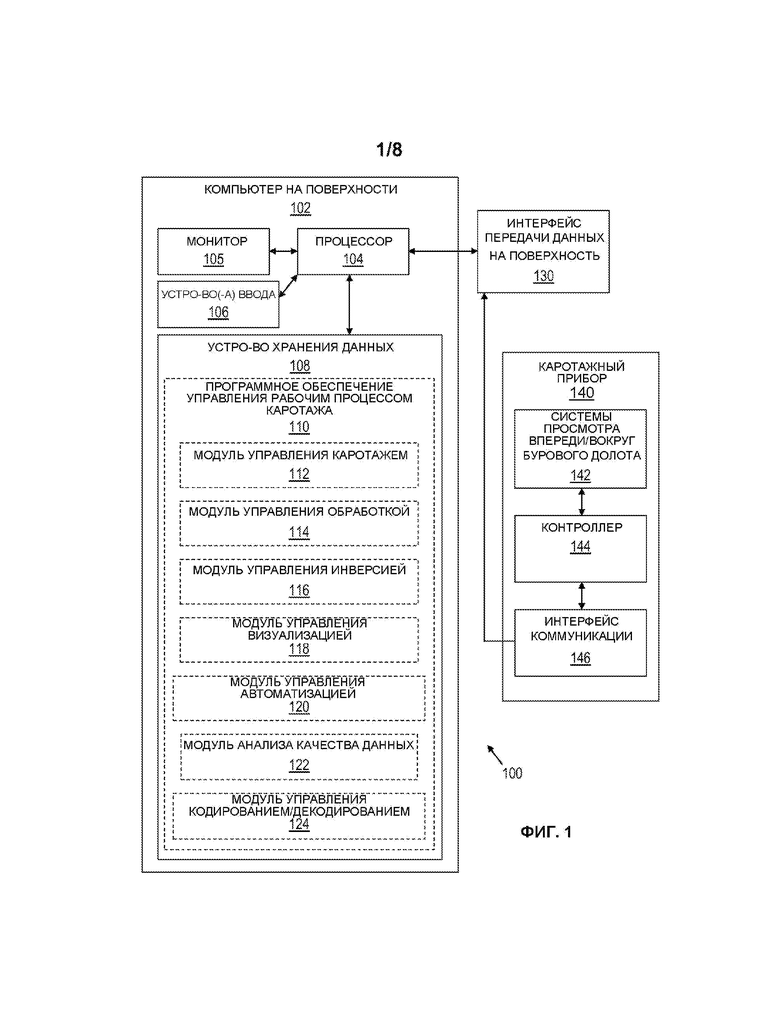
На Фиг. 1 показана блок-схема иллюстративной каротажной системы 100. Каротажная система 100 включает каротажный прибор 140 с системами 142 просмотра впереди/вокруг бурового долота для сбора измерений перед буровым долотом и(или) вокруг него. В контексте данной заявки термин “измерения перед буровым долотом” относится к измерениям, соответствующим районам, которые находятся перед буровым долотом или реперной точкой, связываемой с буровым долотом, тогда как термин “измерения вокруг бурового долота” относится к измерениям, соответствующим районам, которые находятся по сторонам от бурового долота или реперной точки, связываемой с буровым долотом.
Каротажный прибор 140 также содержит контроллер 144 для руководства различными действиями каротажного прибора 140. Действия включают установку или настройку параметров для сбора необработанных данных, обработку необработанных данных, хранение необработанных и(или) обработанных данных и передачу необработанных и(или) обработанных данных на поверхность. Интерфейс 146 коммуникации каротажного прибора 140 обеспечивает возможность передачи данных измерений перед буровым долотом и(или) вокруг бурового долота в интерфейс 130 коммуникации на поверхность. Интерфейс 130 коммуникации на поверхность передает данные измерений перед буровым долотом и(или) вокруг бурового долота компьютеру 102 на поверхности с помощью известных методов телеметрии (например, по гидроимпульсному каналу связи, подачей электромагнитных сигналов или по сети трубопроводов с оплеткой). Следует понимать, что данные измерений перед буровым долотом и(или) вокруг бурового долота, передаваемые компьютеру 102 на поверхности с каротажного прибора 140, могут включать необработанные данные измерений, обработанные данные измерений, инвертированные данные измерений и(или) параметры визуализации.
Как проиллюстрировано на Фиг. 1, компьютер 102 на поверхности включает процессор 104, соединенный с монитором 105, устройство(-а) 106 ввода и устройство хранения 108 данных. Монитор 105 и устройство(-а) 106 ввода функционируют как пользовательский интерфейс, который позволяет оператору (т.е. бурильщику и(или) оператору каротажа) просматривать информацию, вводить команды управления направлением и(или) вводить команды или параметры рабочего процесса каротажа.
По меньшей мере в некоторых вариантах реализации изобретения в устройстве хранения 108 данных хранится программное обеспечение 110 управления рабочим процессом каротажа с модулем 112 управления каротажем, модулем 114 управления обработкой, модулем 116 управления инверсией, модулем 118 управления визуализацией, модулем 120 управления автоматизацией, модулем 122 анализа качества данных и модулем 124 управления кодированием/декодированием. По меньшей мере в некоторых вариантах реализации изобретения действия программного обеспечения 110 управления рабочим процессом каротажа по меньшей мере частично основаны на генерировании визуального представления пласта по собранным данным измерений и получении обратной связи от оператора. В качестве примера: обратная связь от оператора может соответствовать выбору оператором какой-либо из имеющихся опций управления рабочим процессом, предоставлению анализа качества данных и(или) установлению правил для обеспечения возможности автоматизации рабочего процесса для текущих каротажных работ.
В некоторых вариантах реализации изобретения устройство(а) 106 ввода включает сенсорный экран, мышь и(или) клавиатуру для возможности взаимодействия оператора с программным обеспечением 110 управления рабочим процессом каротажа. Кроме того, устройство(а) 106 ввода может обеспечить возможность взаимодействия оператора с интерфейсом управления направлением, благодаря которому оператор может принимать решения по управлению направлением с помощью визуальных представлений пласта, как описано в данной заявке. Следует понимать, что действия программного обеспечения 110 управления рабочим процессом каротажа применимы к системам кабельного каротажа, а также к системам КВБ.
По меньшей мере в некоторых вариантах реализации изобретения модуль 112 управления каротажем программного обеспечения 110 управления рабочим процессом каротажа обеспечивает возможность выбора или настройки управляющих параметров каротажными работами для текущих каротажных работ. Типовые управляющие параметры каротажными работами включают параметр скорости перемещения (например, фиксированные или многократные значения переменной скорости), параметр уровня мощности исходного сигнала, параметр частоты исходного сигнала, параметр усредненной длины окна, параметр ориентации антенны и(или) параметр ориентации антенны с синтезированной апертурой.
В частности, параметр уровня мощности исходного сигнала может быть связан с различными приборами, такими как электромагнитный прибор каротажа удельного сопротивления, акустический прибор оценки продуктивности пласта, магниторезонансный прибор, акустический кавернометр, дальномер, прибор каротажа сопротивления просмотра впереди/вокруг бурового долота, акустический прибор просмотра впереди/вокруг бурового долота, импульсный источник нейтронов или источник рентгеновских лучей, получаемых из электронного луча. Параметры частоты могут быть связаны с электромагнитными (в том числе магниторезонансными) и акустическими приборами всех типов, включая дальномеры и приборы просмотра впереди/вокруг бурового долота. Параметры окна усреднения, как правило, связаны с ядерными датчиками, хотя они также могут быть использованы для обнаружения слабых электромагнитных или акустических сигналов (например, в приборах просмотра впереди/вокруг бурового долота или в дальномерах).
Типовые параметры антенн обеспечивают возможность выбора конкретных антенн или акустических передатчиков (или групп антенн или акустические передатчиков) в системе антенн или акустических передатчиков. Кроме того, параметры антенн могут обеспечивать возможность настройки фазового сдвига между антеннами или акустическими передатчиками. Параметры антенн могут также обеспечивать возможность настройки чувствительности или коэффициента усиления антенн или акустических передатчиков. В то же время параметры ориентации антенны обеспечивают возможность настройки ориентации главной оси отклика антенны или акустического передатчика относительно местной оси бурильной колонны и(или) относительно друг друга. Параметры ориентации антенны могут также обеспечивать возможность настройки относительного азимутального позиционирования антенн или акустических передатчиков относительно друг друга. В некоторых вариантах реализации изобретения такие параметры ориентации антенны связаны с системой КВБ, тогда как другие параметры связаны с системой КВБ и системой кабельного каротажа.
Модуль 114 управления обработкой обеспечивает возможность выбора или настройки управляющих параметров обработки данных для текущих каротажных работ. Типовые управляющие параметры обработки данных включают многокомпонентный обобщенный параметр, обобщенный параметр разных углов наклона, параметр элементов задержки виртуальной антенны, параметр фильтрации шумов, параметр тригонометрической подгонки, параметр поправки на температуру, параметр специализации программного обеспечения, параметр устранения эффекта рогов поляризации, параметр поправки на влияние скважины и параметр калибровки.
Модуль 116 управления инверсией обеспечивает возможность выбора или настройки параметров управления инверсией данных для текущих каротажных работ. Типовые параметры управления инверсией данных включают параметр типа инверсии, параметр частоты инвертирования и параметр усреднения инвертирования. Типовые параметры управления инвертированием включают: начальную оценку расстояния до границы, пределы области поиска инверсии, начальные оценки значений удельного сопротивления пласта выше и ниже границы, начальные оценки значений плотности породы выше и ниже границы, начальные оценки диаметра и удельного сопротивления зоны проникновения, начальные оценки падения и анизотропии пласта (и границы пределов этих переменных), выбор определенных алгоритмов (например, выбора закона образования смеси для того или иного типа пласта). Закон образования смеси описывает видоизменение объемных физических характеристик композиционного материала в качестве функции характеристик и распределения материалов, его составляющих. Такие законы образования смеси, как правило, являются полуэмпирическими по своему характеру и их истинность зависит от характеристик пласта.
Параметры типа инверсии связаны главным образом с параметрированием геометрии пласта и неизвестных величин. В случаях, когда предполагается модель однородного пласта, типовое значение параметра типа инверсии является нульмерным. В случаях, когда предполагается, что вариации характеристик пласта имеет место только в одном пространственном измерении, значение параметра другого типа инверсии является одномерным. В случаях, когда вариации характеристик пласта учитываются только в двух пространственных измерениях, значение параметра другого типа инверсии является двумерным. В случаях, когда вариации характеристик пласта имеют место во всех трех пространственных измерениях, значение параметра другого типа инверсии является трехмерным. В этом случае измерения могут считаться как находящиеся в прямоугольной, цилиндрической, эллиптической или сферической системах координат. Параметры типа инверсии могут также обеспечивать возможность выбора между итеративным алгоритмом и алгоритмом, основанным на поиске по таблице данных инверсии. Для поиска по таблице данных инверсии учитывается предвычисляемая таблица, в которой отображены выводимые данные для параметров ввода прямой задачи (например, случайная линейная система с постоянными параметрами, такими как решение значений сигналов при условии распределения определенных характеристик пласта и конструкции прибора). Параметр типа инверсии может также обеспечивать возможность выбора используемого алгоритма численной оптимизации (например, алгоритмы наискорейшего спуска, сопряженного градиента, Левенберга, Марквардта и Гаусса-Ньютона).
Параметры частоты инвертирования могут включать множество индексов, указывающих, какие частоты будут использованы в инверсии. Параметрами частоты инвертирования также могут быть сами эти частоты. Параметры усреднения инвертирования могут задавать количество вводимых точек замера глубины, включаемых в инверсию и(или) распределение нагрузок. В качестве дополнения или альтернативного варианта параметры усреднения инвертирования могут задавать количество точек или слоев, включаемых в параметрирование выходных данных задачи инверсии.
Модуль 118 управления визуализацией обеспечивает возможность выбора или настройки параметров управления визуализацией для текущих каротажных работ. Типовые параметры управления визуализацией включают параметр типа горизонтальной проекции и параметры опций горизонтальной проекции.
В частности, параметры, которые отображаются или представлены модулем 118 управления визуализацией, могут включать физические параметры, такие как ориентация прибора, значения удельного сопротивления пласта, вертикальное удельное сопротивление, горизонтальное удельное сопротивление, относительные углы падения пласта, относительные азимутальные углы, значения падения пласта, азимуты пласта, траектория бурения, расстояние до границ пласта, водонасыщенность и пористость пласта. Помимо этого, могут быть отображены или представлены модулем 118 управления визуализацией проверенные параметры, такие как оценки неопределенности, данные о типе инверсии и(или) данные сравнения. Путем отображения или представления физических параметров и проверенных параметров модуль 118 управления визуализацией предоставляет оператору КВБ возможность обеспечивать входные данные для управления рабочим процессом каротажа и(или) для правил механизма адаптивного обучения, как описано в данной заявке.
Типовые опции горизонтальной проекции включают различные опции двумерного (2D) или трехмерного (3D) графического представления данных, в которых положение/ориентация прибора и характеристик пласта (например, удельное сопротивление или электромагнитная проницаемость) представлены в цвете, в виде текстур и(или) контуров. Отдельные компоненты пласта также могут быть идентифицированы в цвете, в виде текстур и(или) контуров. В некоторых вариантах реализации изобретения текстуры или контуры, используемые для представления характеристик пласта, имеют вид, заданный по умолчанию, для представления изотропных характеристик пласта, и вид в масштабе (относительно вида, заданного по умолчанию) для представления aнизотропных характеристик пласта. Опции двумерного/трехмерного графического представления данных могут включать использование стрелок, линий и(или) полос для представления направлений и расстояний (например, направление и расстояние между буровым долотом и границей пласта). Опции двумерного/трехмерного графического представления данных также могут включать оценку неопределенности для отображаемых или представляемых данных. В некоторых вариантах реализации изобретения неопределенность представлена посредством изменения прозрачности отображаемых данных (при этом более высокая прозрачность представляет повышенную неопределенность), изменения уровня яркости отображаемых данных или путем отображения зоны неопределенности для отображаемых данных. Опции двумерного/трехмерного графического представления данных также могут включать отображение данных, соответствующих разным инверсиям, наряду с идентификаторами инверсии. Опции двумерного/трехмерного графического представления данных также могут включать перенос нанесенных на карту данных, которые выходят за границы горизонтальной проекции. Опции двумерного/трехмерного графического представления данных также могут включать радиолокационное целеуказание для отображения расстояния между границами пласта и буровым долотом и направление движения бурового долота.
В некоторых вариантах реализации изобретения отображение горизонтальной проекции включает отображение двумерной горизонтальной проекции, иллюстрирующей характеристики пласта в одном заранее заданном направлении по отношению к реперной точке для прибора в качестве функции глубины. В качестве дополнения или альтернативного варианта отображение горизонтальной проекции включает отображение двумерной или трехмерной горизонтальной проекции, иллюстрирующей траекторию бурения, и по меньшей мере один отдельный двумерный или трехмерный объект траектории бурения для каждого множества различающихся значений глубины вдоль траектории бурения. В качестве дополнения или альтернативного варианта отображение горизонтальной проекции включает отображение двумерной горизонтальной проекции, иллюстрирующей отдельный индикатор расстояния до границы пласта для каждого множества различающихся значений глубины. В качестве дополнения или альтернативного варианта отображение горизонтальной проекции включает отображение вида радиолокационной карты местности, иллюстрирующего реперную точку прибора и концентрические окружности вокруг реперной точки прибора для представления расстояния от реперной точки прибора, при этом вид радиолокационной карты местности отображает для прибора объекты характеристик пласта в качестве функции азимута относительно оси. Объектами характеристик пласта могут быть линии границ и(или) данные о пласте, такие как удельное сопротивление или электромагнитная проницаемость. В качестве дополнения или альтернативного варианта отображение горизонтальной проекции включает отображение горизонтальной проекции, иллюстрирующей траекторию бурения и границы пласта в качестве функции глубины и горизонтального положения, при этом горизонтальная проекция выполняет перенос горизонтального положения отображаемой траектории бурения на противоположную сторону горизонтальной проекции, если длина горизонтального участка траектории бурения выходит за пределы горизонтального положения горизонтальной проекции. В различных горизонтальных проекциях могут быть активизированы или деактивизированы различные ориентиры на карте местности.
Модуль 120 управления автоматизацией обеспечивает возможность выбора или настройки правил механизма адаптивного обучения для текущих каротажных работ. Типовые правила механизма адаптивного обучения включают правила для выбора или настройки управляющих параметров каротажных работ, управляющие параметры обработки и(или) параметры управления инвертированием, описанные в соответствии с заранее заданным выполнением программы, измерениями и(или) пусковыми схемами. По меньшей мере в некоторых вариантах реализации изобретения модуль 120 управления автоматизацией устанавливает правила с использованием информации из базы данных, такой как необработанные данные измерений, обработанные данные измерений, инвертированные данные измерений и(или) параметры визуализации. Кроме того, для установления правил механизма адаптивного обучения может учитываться неавтоматизированная обратная связь касательно качества необработанных данных измерений, обработанных данных измерений, инвертированных данных измерений и(или) параметров визуализации. Кроме того, для установления правил механизма адаптивного обучения может быть применен процесс фильтрации данных, такой как последовательность действий нейронной сети и(или) последовательность действий многомерной интерполяции/экстраполяции.
Модуль 122 анализа качества данных обеспечивает пользовательский интерфейс для предоставления оператору возможности выбора или ввода значения качества данных для необработанных данных измерений, обработанных данных измерений, инвертированных данных измерений и(или) параметров визуализации. По меньшей мере в некоторых вариантах реализации изобретения обратная связь, предоставляемая оператором с помощью модуля 122 анализа качества данных, задействуется другими модулями программного обеспечения 110 управления рабочим процессом каротажа. Например, модуль 120 управления автоматизацией может использовать такую обратную связь, по меньшей мере частично, для установления правил механизма адаптивного обучения, как описано в данной заявке по меньшей мере на Фиг. 12.
Модуль 124 управления кодированием/декодированием обеспечивает возможность выбора или настройки схем кодирования/декодирования для управления передачей данных для текущих каротажных работ. Разные схемы кодирования/декодирования определяют количество многочисленных типов необработанных данных измерений, передаваемых с каротажного прибора 140 компьютеру 102 на поверхности во время текущих каротажных работ. Кроме того, разные схемы кодирования/декодирования связаны с объемом обработки, применяемой к многочисленным типам необработанных данных измерений со стороны каротажного прибора 140 и(или) компьютера 102 на поверхности. Кроме того, разные схемы кодирования/декодирования определяют количество многочисленных типов обработанных данных измерений, передаваемых с каротажного прибора 140 компьютеру 102 на поверхности во время текущих каротажных работ. Может быть выбрана или скорректирована конкретная схема кодирования/декодирования, например, в ответ на просмотр оператором качества различных типов данных и определения необходимости другого набора типов данных или другого объема конкретного типа данных. Кроме того, механизм адаптивного обучения может выбирать конкретную схему кодирования/декодирования на основании выполнения программы, измерений и(или) пусковых схем.
Типовые операции управления рабочим процессом, выполняемые с помощью механизма адаптивного обучения и(или) данных, вводимых оператором, включают изменение частоты, уровня мощности и(или) выбор другой комбинации передатчика и приемника в ответ на выходной сигнал датчика, не входящий в диапазон, в пределах которого он получает точный отклик. В качестве конкретного примера: в пласте с высоким удельным сопротивлением фазовый сдвиг удельного сопротивления распространяющейся волны между двумя приемными антеннами может быть настолько мал, что достоверное измерение удельного сопротивления не может быть выполнено с использованием полученного значения. В подобном случае может быть выбрано большее расстояние между антеннами и(или) более высокая частота. В качестве еще одного примера: средняя частота передатчика могла быть смещена (например, более высокая частота в данном конкретном примере) в ответ на обнаружение того, что какой-либо конкретный режим (например, режим Стоунли) преобладает над откликом. Кроме того, с использованием разности времени вступления у разных передатчиков, а также различных методов обработки времени/частоты могут быть установлены другие режимы распространения.
В качестве еще одного примера операций управления рабочим процессом: все необработанные и обработанные данные, связанные с частотой, могут передаваться или приниматься с пониженной точностью и(или) более низкой скоростью передачи данных в ответ на результаты инверсии и интерпретации, нечувствительные к данной частоте. В качестве еще одного примера: если какие-либо значительные изменения сигнала в отношении глубины не предполагаются, может быть выбрана схема кодирования на основании дифференцирования в отношении глубины для оптимизации пропускной способности. В качестве еще одного примера: если имеются значительные взаимосвязи между некоторыми каналами необработанных или обработанных данных, может быть использована многомерная схема кодирования/декодирования для оптимизации пропускной способности.
В еще одном примере может быть выполнено вычисление и сравнение с пороговым уровнем вариаций необработанных или обработанных сигналов. Если вариации ниже порогового уровня, может быть активировано дифференцирующее кодирование/декодирование. В качестве еще одного примера: может быть выполнено вычисление и сравнение взаимосвязей между разными каналами необработанных или обработанных данных с пороговым уровнем. Если взаимосвязи выше порогового уровня, может быть активирована двумерная схема кодирования/декодирования.
По меньшей мере в некоторых вариантах реализации изобретения программное обеспечение управления рабочим процессом каротажа 110 обеспечивает возможность различных ручных или автоматизированных настроек на основании заранее заданных критериев. В качестве примера: в ответ на определение того, что удельное сопротивление слоя пласта меньше порогового значения (что, например, является признаком неустойчивой зоны давления) или больше порогового значения (что, например, является признаком соляного купола) могут быть выполнены настройки скорости бурения (включая пуск/остановку) или удельного веса бурового раствора. В качестве еще одного примера: уровень мощности на той или иной частоте для операции каротажа может быть повышен в ответ на определение того, что качество инвертирования на той или иной частоте ниже порогового уровня. Кроме того, может быть снижена частота, используемая для операции каротажа, в ответ на определение того, что инвертированное удельное сопротивление пласта ниже порогового уровня. Кроме того, может быть повышена частота, используемая для операции каротажа, в ответ на определение того, что инвертированное удельное сопротивление пласта выше порогового уровня. Кроме того, могут быть выполнены более длительные измерения (с бóльшим усреднением) в ответ на определение того, что уровень шумов выше порогового уровня. Кроме того, могут быть выполнены настройки ориентации антенны с синтезированной апертурой для оптимизации чувствительности перед прибором в ответ на определение угла наклонения или ориентации прибора. Кроме того, может быть выбрано уменьшенное расстояние между передатчиком и приемником в ответ на определение того, что предполагаемое расстояние до границы меньше порогового уровня. Кроме того, если определено, что качество данных выше порогового уровня, результаты инверсии могут быть использованы в качестве начальных приближений для следующих измерений. В остальных случаях результаты инверсии могут не учитываться. Кроме того, в ответ на определение существования условия, вызывающего аномалию, алгоритм или процесс обучения могут быть остановлены (предотвращается обучение неправильным действиям). Кроме того, алгоритм или процесс обучения могут быть возвращены в исходное состояние или установлены в другой режим в ответ на определение того, что обнаружена новая производственная среда.
Типовыми правилами механизма адаптивного обучения или алгоритмы могут быть условные выражения, которые исполняются в случае, если заданное условие становится истинным. Эти правила или алгоритмы могут настраиваться на основании результатов предыдущих измерений и(или) данных, собранных от других приборов или из других скважин. В альтернативном варианте правила или алгоритмы могут быть настроены таким образом, что параметры определяются на основании производимых измерений. Например, уровень мощности для той или иной частоты во время каротажных работ может быть установлен обратно пропорционально оценке качества инвертирования. Кроме того, та или иная частота может быть понижена или повышена во время каротажных работ до достижения максимального уровня абсолютного сигнала или соотношения сигнал-шум (SNR). Кроме того, длина окна измерений может настраиваться повторно во время каротажных работ для получения требуемого уровня SNR в пределах поля допусков.
Хотя Фиг. 1 иллюстрирует, что инструмент 110 управления рабочим процессом каротажа хранится в компьютере 102 на поверхности и исполняется им, следует понимать, что соответствующее программное обеспечение может исполняться каротажным прибором 140 для выполнения различных действий по управлению рабочим процессом каротажа, описанных в данной заявке. Например, по меньшей мере в некоторых вариантах реализации изобретения контроллер 144 каротажного прибора 140 включает программное обеспечение, соответствующее различным модулям, описанным для инструмента 110 управления рабочим процессом каротажа, для руководства по меньшей мере некоторыми управляющими параметрами каротажных работ, управляющими параметрами обработки, параметрами управления инвертированием, параметрами визуализации, управления автоматизацией, анализом качества данных и схемами кодирования/декодирования, как описано в данной заявке.
Описание данных измерений перед буровым долотом и(или) вокруг бурового долота применимо к вариантам реализации каротажа во время бурения (КВБ) каротажной системы 100. Для вариантов реализации кабельного каротажа каротажной системы 100, системы 142 просмотра впереди/вокруг бурового долота каротажного прибора 140 также актуальны, однако реперную точку будет представлять часть инструмента, спускаемого в скважину на тросе, а не буровое долото, как в вариантах реализации КВБ. Кроме того, следует понимать, что в вариантах реализации КВБ или кабельного каротажа каротажной системы 100 могут быть задействованы несколько каротажных приборов, каждый из которых имеет собственную реперную точку для операций каротажа по просмотру впереди или просмотру вокруг бурового долота.
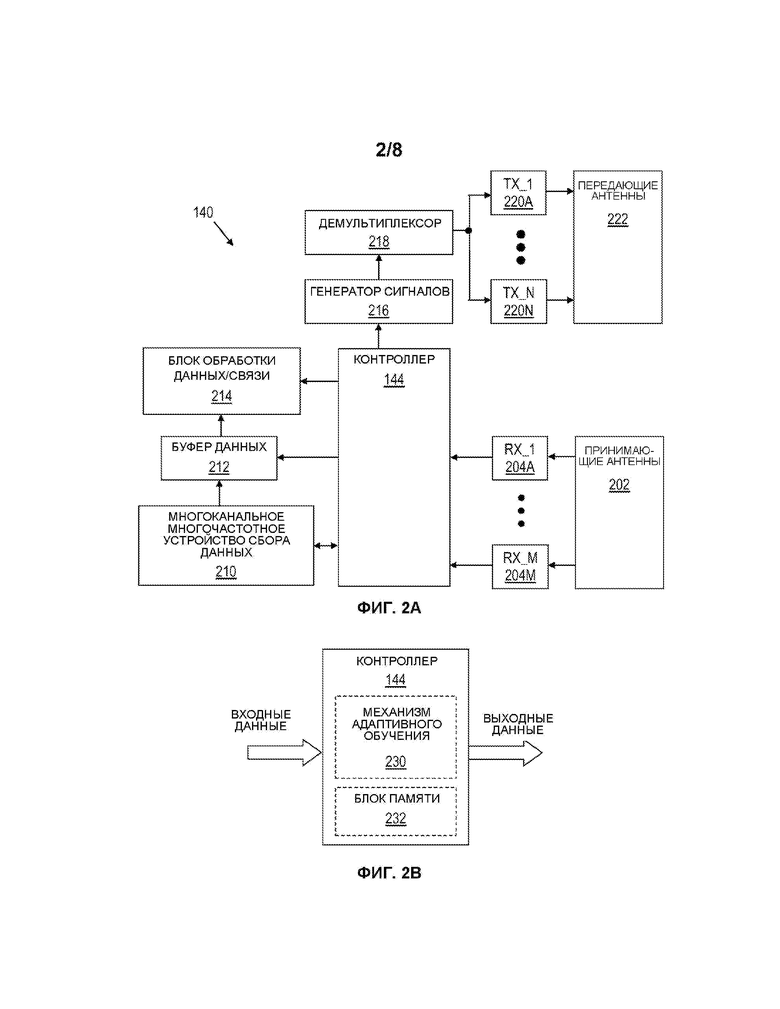
На Фиг. 2A показана блок-схема иллюстративного прибора 140 индукционного или электромагнитного каротажа. Как проиллюстрировано на Фиг. 2A, каротажный прибор 140 содержит контроллер 144, имеющий связь с различными другими компонентами. В частности, каротажный прибор 140 включает N передатчиков 220A-220N с соответствующими антеннами 222 и M приемников 204A-204M с соответствующими антеннами 202, имеющими связь с контроллером 144. Для передачи сигналов контроллер 144 дает указание генератору 216 сигналов генерировать импульс, последовательность импульсов или другие сигналы. Выходной сигнал генератора 216 сигналов подается в демультиплексор 218, который направляет выходной сигнал из генератора 216 сигналов в один из передатчиков 220A-220N. В то же время необработанные данные о сигналах, получаемых по приемникам 204A-204M, сохраняются в буфере 212 данных, после чего блок 214 обработки данных/связи передает необработанные данные в интерфейс 130 коммуникации на поверхность (см. Фиг. 1). Блок 214 обработки данных/связи также может обрабатывать необработанные данные и передавать обработанные данные в интерфейс 130 коммуникации на поверхность в дополнение к необработанным данным измерений или вместо них. Кроме того, блок 214 обработки данных/связи может выбирать типы и объемы обработки необработанных данных. Кроме того, блок 214 обработки данных/связи может выбирать типы и объемы передачи необработанных данных и(или) обработанных данных в интерфейс 130 коммуникации на поверхность. Например, блок 214 обработки данных/связи может выборочно выполнять операции обработки в соответствии с различными параметрами управления, такими как многокомпонентный обобщенный параметр, обобщенный параметр угла наклона, параметр задержки виртуальной антенны, параметр фильтрации шумов, параметр тригонометрической подгонки, параметр поправки на температуру, параметр специализации программного обеспечения, параметр устранения эффекта рогов поляризации, параметр поправки на влияние скважины и параметр калибровки.
Типовые применения вышеуказанных параметров включают установку многокомпонентного обобщенного параметра для имитирования передающих и приемных антенн с различными углами наклона на основании предполагаемого относительного угла падения слоев разрабатываемого пласта. Значение задержки или активирование задержки виртуальной антенны могут быть настроены на основании требуемой глубины изысканий или вертикального разрешения. Кроме того, может быть включен или отключен параметр фильтрации шумов на основании уровня шумов и порогового уровня. Кроме того, к массиву сгруппированных данных, собранных при различных углах вращения в системе КВБ, может быть применен параметр тригонометрической подгонки. Кроме того, может быть применен параметр поправки на температуру, если температура не входит в диапазон настоящей калибровки. Кроме того, может быть применен параметр устранения эффекта рогов поляризации, если в измерениях кажущегося удельного сопротивления наблюдаются большие пики.
Кроме того, блок 214 обработки данных/связи может выполнять операции обработки в соответствии с параметрами инверсии и параметрами визуального представления. Кроме того, блок 214 обработки данных/связи может выполнять операции обработки в соответствии с параметрами качества данных или в соответствии с правилами. Кроме того, блок 214 обработки данных/связи может выполнять операции обработки в соответствии с применением фильтров данных (например, нейронной сети либо операций многомерной интерполяции/экстраполяции) к необработанным данным измерений или обработанным данным измерений.
В некоторых вариантах реализации изобретения передатчики 220A-220N могут действовать как приемники, а приемники 204A-204M могут действовать как передатчики. Следовательно, возможны различные режимы работы. Также может быть выполнено объединение сигналов по времени, частоте или по обоим этим параметрам. В операциях каротажа, основанных на частоте, частотный сигнал испускается в местах, где возможна самая большая глубина обнаружения на очень низких частотах. Однако при использовании очень низких частот сигнал может быть слишком слабым. Если же используются очень высокие частоты, эффективная глубина проникновения становится слишком малой, что приводит к затуханию сигнала. Соответственно, прибор 140 может поддерживать операции на нескольких частотах и может производить настройку используемой частоты с целью обеспечения нормального функционирования в некотором диапазоне значений удельного сопротивления.
В операциях каротажа, основанных на времени, испускается большое количество электромагнитных частот. Вместо узкополосных сигналов передаются широкополосные сигналы (например, множество периодов прямоугольных импульсов или импульсов другой формы). В качестве примера: генератор 216 сигналов может направлять широкополосный сигнал в один из передатчиков 220A-220N и в одну из соответствующих антенн 222 для испускания ими электрического сигнала в пласт. В пласте электрический сигнал взаимодействует с характеристиками пласта (например, с удельным сопротивлением или удельной проводимостью пласта). Электрический сигнал, подвергшийся изменениям в пласте, обнаруживается приемной антенной 202 и передается в контроллер 144, буфер 212 данных и блок 214 обработки данных/связи. В соответствии с некоторыми вариантами реализации изобретения оператор на поверхности имеет возможность текущего контроля за операциями каротажа с помощью приборов визуализации, как описано в данной заявке, а также может вносить изменения в обработку или в данные на поверхности. Механизм адаптивного обучения может также давать указания для каротажного прибора 140 выполнять настройку параметров каротажа или обработку параметров для текущих каротажных работ, как описано в данной заявке.
На Фиг. 2B показан иллюстративный контроллер 144 каротажного прибора для скважинного прибора, такого как каротажный прибор 140. В варианте реализации изобретения, проиллюстрированном на Фиг. 2B, контроллер 144 получает различные входные данные и генерирует различные выходные сигналы. В частности, в некоторых вариантах реализации изобретения контроллер 144 содержит механизм 230 адаптивного обучения, который срабатывает на запуск и(или) выбор значений для одного или более параметров управления рабочим процессом каротажа, используемых во время текущих каротажных работ. Например, механизм 230 адаптивного обучения может запускать и(или) выбирать значения для одного или более параметров управления рабочим процессом каротажа на основании входных данных, таких как данные измерений, обратная связь от оператора, полученные правила и(или) усвоенные правила. Следовательно, по меньшей мере в некоторых вариантах реализации изобретения механизм 230 адаптивного обучения соответствует программному обеспечению или программируемому компоненту, размещённому внутри каротажного прибора 140 или иным образом помещенным вместе с каротажным прибором 140. В альтернативных вариантах реализации изобретения части механизма 230 адаптивного обучения распределены таким образом, что некоторые действия механизма 230 адаптивного обучения выполняются в забое (в каротажном приборе 140), тогда как другие действия выполняются на поверхности (в компьютере 102 на поверхности). Известны различные методы адаптивного обучения, которые могут применяться механизмом 230 адаптивного обучения. Кроме того, для хранения значений, полученных правил, усвоенных правил и(или) другой информации, используемой механизмом 230 адаптивного обучения, может применяться блок 232 памяти. Более подробные сведения по системам адаптивного обучения можно найти в работе Neural and Adaptive Systems by José C. Principe et. al (2000), ISBN 0-471-35167-9.
Типовые правила механизма адаптивного обучения включают правила для выбора или настройки управляющих параметров каротажных работ, управляющие параметры обработки и(или) параметры управления инвертированием в соответствии с заранее заданным выполнением программы, измерениями и(или) пусковыми схемами. По меньшей мере в некоторых вариантах реализации изобретения правила для механизма 230 адаптивного обучения установлены с помощью информации из базы данных, такой как необработанные данные измерений, обработанные данные измерений, инвертированные данные измерений и(или) параметры визуализации. Кроме того, для установления правил для механизма 230 адаптивного обучения может учитываться неавтоматизированная обратная связь по качеству необработанных данных измерений, обработанных данных измерений, инвертированных данных измерений и(или) параметров визуализации. Кроме того, может быть применен процесс фильтрации данных, такой как последовательность действий нейронной сети и(или) последовательность действий многомерной интерполяции/экстраполяции для установления правил для механизма 230 адаптивного обучения.
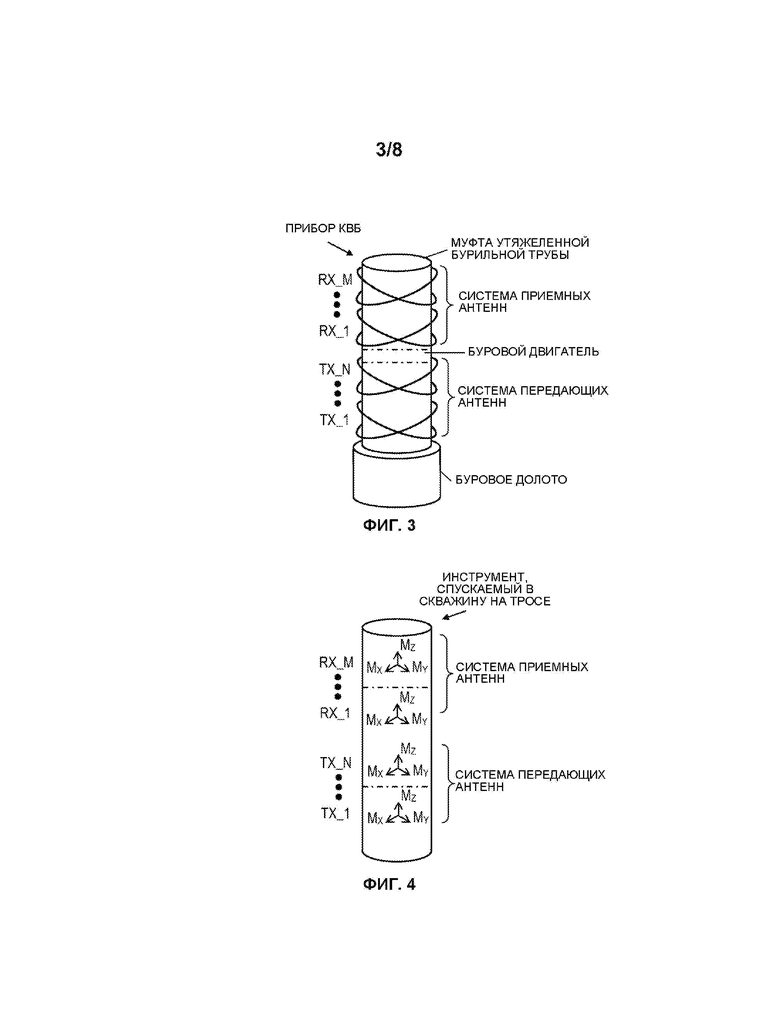
На Фиг. 3 иллюстрируются компоненты варианта реализации КВБ каротажного прибора 140. Как проиллюстрировано на фиг. 3, прибор КВБ включает муфту утяжеленной бурильной трубы (оправку), буровой двигатель и буровое долото. Прибор КВБ также включает систему приемных антенн (антенны RX_1 - RX_M) и систему передающих антенн (антенны TX_1 - TX_N). Приемные антенны и передающие антенны могут быть сгруппированы, как проиллюстрировано на фигуре, или перемежаться. Кроме того, различные антенны могут быть расположены вокруг муфты утяжеленной бурильной трубы и(или) между буровым двигателем и буровым долотом (установка антенн на буровой двигатель довольно затруднительна и ее, как правило, стараются избегать). Для операций КВБ измерения зачастую производятся во время пробуривания скважины, хотя бурение может быть прекращено для снижения уровня шумов и выполнения измерений с помощью более чувствительных приборов. Выполнение измерений с прекращением бурения обеспечивает возможность использования пониженных частот и обеспечивает бóльшую точность измерений.
По меньшей мере в некоторых вариантах реализации изобретения, как проиллюстрировано на Фиг. 3, буровой двигатель не содержит антенны. В подобном случае расстояние между передающей и приемной антеннами ограничено. В качестве примера: если длина бурового двигателя составляет приблизительно 7,62 м (25 футов), передатчики и приемники, установленные выше и ниже бурового двигателя, разделяются расстоянием по меньшей мере 7,62 м (25 футов). Кроме того, использование антенны возле бурового долота (например, антенны бурового двигателя со стороны бурового долота) влечет за собой передачу данных с одной стороны бурового двигателя на другую сторону для вывода данных, собранных антенной возле бурового долота. В подобном случае скорость передачи данных с прибора КВБ на поверхность ограничена значениями скорости передачи для отправки данных с антенны возле бурового долота на другую сторону бурового двигателя, где установлены другие электронные средства связи. Соответственно, схема кодирования/декодирования данных для прибора КВБ может быть выбрана так, чтобы учитывать конкретную схему расположения антенн (например, используется ли антенна возле бурового долота) и ее соответствующие особенности скорости передачи данных.
Фиг. 4 иллюстрирует компоненты варианта реализации кабельного каротажа каротажного прибора 140. В случае применения кабельного каротажа скважина уже пробурена и может быть заполнена раствором. Прибор подвешивается на каротажный кабель и опускается в скважину. В подобном случае прибор включает систему передающих антенн и систему приемных антенн с многокомпонентными антеннами, как проиллюстрировано на Фиг. 4. Вследствие отсутствия нагрузок бурения в варианте реализации кабельного каротажа содержится гораздо меньше металлических деталей, чем в варианте реализации КВБ, благодаря чему уровни сигналов повышаются, что обеспечивает возможность проведения операций каротажа на более низких частотах. Например, инструмент, спускаемый в скважину на тросе, может быть изготовлен из стекловолокна, которое пропускает электромагнитные волны и, следовательно, оказывает незначительно влияние на измерения.
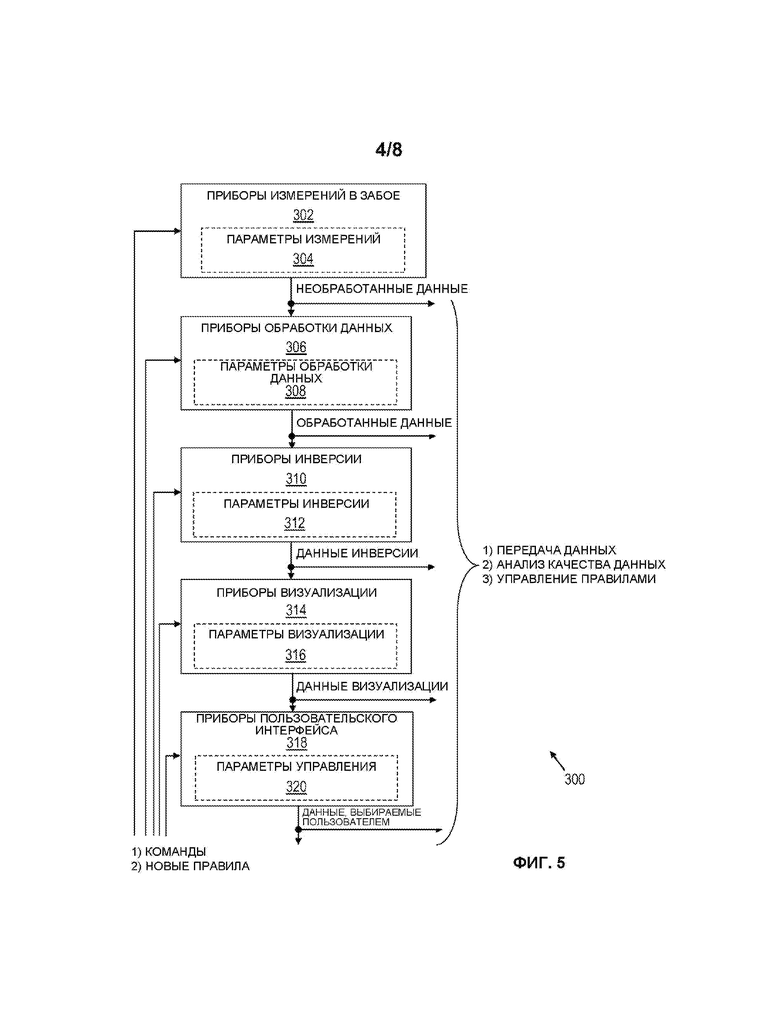
На Фиг. 5 показана блок-схема иллюстративных элементов каротажной системы, связанных с действиями по управлению рабочим процессом каротажа, как описано в данной заявке. Как проиллюстрировано на Фиг. 5, различные приборы представляют аппаратное обеспечение, программное обеспечение и(или) другие компоненты для целей сбора необработанных данных измерений, обработки необработанных данных измерений, инвертирования обработанных данных, определения визуализации данных для пласта на основании собранных измерений или инвертированных данных и предоставления пользовательского интерфейса для обеспечения возможности введения пользователем данных, как описано в данной заявке. Различные приборы с Фиг. 5 могут применяться в приборе КВБ, приборе кабельного каротажа, контроллере на поверхности и(или) компьютере на поверхности.
В частности, приборы 302 измерений на забое с настраиваемыми параметрами 304 измерений собирают и выдают необработанные данные. Приборы 306 обработки данных с настраиваемыми параметрами 308 обработки обрабатывают необработанные данные и выдают обработанные данные. Приборы 310 инверсии с настраиваемыми параметрами 312 инверсии инвертируют обработанные данные и выдают инвертированные данные. Приборы 314 визуализации с настраиваемыми параметрами 316 визуализации определяют данные визуализации с помощью инвертированных данных и выдают данные визуализации. Приборы 318 пользовательского интерфейса с настраиваемыми параметрами 320 управления отображают горизонтальную проекцию пласта на основании данных визуализации и обеспечивают оператору возможность предоставить пользовательский блок. Приборы 318 пользовательского интерфейса выдают данные, выбираемые пользователем.
По меньшей мере в некоторых вариантах реализации изобретения имеются в доступе необработанные данные, обработанные данные, данные инвертирования, данные визуализации и(или) данные, выбираемые пользователем, для выполнения действий по передаче данных, действий по анализу качества данных и действий по управлению правилами. Кроме того, результатом необработанных данных, обработанных данных, данных инвертирования, данных визуализации и(или) данных, выбираемых пользователем, может стать подача команд и(или) новых правил на приборы 302 измерений на забое, приборы 306 обработки данных, приборы 310 инверсии, приборы 314 визуализации и(или) приборы 318 пользовательского интерфейса для текущих каротажных работ. По меньшей мере в некоторых вариантах реализации изобретения над приборами 302 измерений на забое, приборами 306 обработки данных, приборами 310 инверсии и(или) другими приборами с Фиг. 5 осуществляется по меньшей мере частичный контроль параметрами управления рабочим процессом каротажа, выбираемых механизмом адаптивного обучения, как описано в данной заявке.
Фиг. 6 репрезентативно и схематически иллюстрирует производственную среду КВБ. Фиг. 6 иллюстрирует буровую платформу 2, служащую опорой для буровой вышки 4, на которой имеется талевый блок 6 для подъема и спуска бурильной колонны 8. Ведущая труба 10 бурильной колонны служит опорой для остальной части бурильной колонны 8 по мере ее спуска посредством стола ротора 12. Стол ротора 12 вращает бурильную колонну 8, таким образом поворачивая буровое долото 14. При вращении буровое долото 14 создает ствол 16 скважины, который проходит сквозь различные пласты 18. Насос 20 прокачивает буровой раствор по питающей трубе 22 в ведущую бурильную трубу 10, в забой через внутреннюю часть бурильной колонны 8, через отверстия в буровом долоте 14 обратно на поверхность через затрубное пространство 9 вокруг бурильной колонны 8 и в емкость для хранения бурового раствора 24. Буровой раствор переносит буровой шлам из ствола 16 скважины в емкость 24 и способствует сохранению целостности ствола 16 скважины. В зависимости от требований по выполнению работ буровой раствор может быть на масляной основе (с высоким удельным сопротивлением) или на водной основе (с низким удельным сопротивлением).
На Фиг. 9 показаны компоненты иллюстративного каротажного прибора 140 в подземной производственной среде с несколькими горизонтами или слоями 18A-18D пласта и границами 90A-90E пласта. Хотя горизонты 18A-18D пласта и границы 90A-90E пласта представлены в виде двумерного (2D) изображения с прямыми линиями, следует понимать, что подземная производственная среда зачастую содержит пласты с горизонтами и границами, имеющими наклонную или изогнутую конфигурацию.
На Фиг. 9 показаны стрелки в различных направлениях. Стрелка 70 представляет направление вбок от каротажного прибора 140, проходящее радиально наружу, стрелка 72 представляет направление вперед от каротажного прибора 140, стрелка 74 представляет истинное вертикальное направление, проходящее вниз от каротажного прибора 140, и стрелка 76 представляет истинное горизонтальное направление, проходящее в стороне от каротажного прибора 140. На Фиг. 9 также показаны различные углы , включающие угол 80, который соответствует относительному углу наклона каротажного прибора 140 (т.е. углу между стрелкой 74 и стрелкой 72), и угол 82, который соответствует азимуту границы 90C пласта относительно реперной точки азимута прибора.
Также на Фиг. 9 показаны различные стрелки для обозначения вертикального расстояния между каротажным прибором 140 и различными границами пласта. В частности, стрелка 80 представляет вертикальное расстояние между каротажным прибором 140 и границей 90B пласта, стрелка 82 представляет вертикальное расстояние между каротажным прибором 140 и границей 90A пласта, стрелка 84 представляет вертикальное расстояние между каротажным прибором 140 и границей 90C пласта и стрелка 86 представляет вертикальное расстояние между каротажным прибором 140 и границей 90D пласта.
В соответствии с некоторыми вариантами реализации изобретения данные расстояния и данные угла, такие как расстояния и углы, описанные на Фиг. 9, наносятся или отмечаются на карте программным обеспечением визуализации (например, модулем 118 управления визуализацией), которое получает данные просмотра вокруг бурового долота или просмотра впереди бурового долота. В частности, параметры, которые отображаются или представлены программным обеспечением визуализации, могут включать физические параметры, такие как ориентация прибора, значения удельного сопротивления пласта, вертикальное удельное сопротивление, горизонтальное удельное сопротивление, относительные углы падения пласта, относительные азимутальные углы, значения падения пласта, азимуты пласта, траектория бурения, расстояние до границ пласта, водонасыщенность и пористость пласта. Помимо этого, проверенные значения, такие как оценки неопределенности, данные о типе инверсии и(или) данные сравнения могут быть отображены или представлены программным обеспечением визуализации. Посредством отображения или представления физических значений и проверенных значений программное обеспечение визуализации обеспечивает оператору возможность принимать решения по управлению направлением для прибора КВБ, настраивать параметры управления для текущих каротажных работ и(или) содействовать установлению правил механизма адаптивного обучения для текущих каротажных работ, как описано в данной заявке.
На Фиг. 10 показана технологическая схема иллюстративного способа 400 настройки рабочего процесса для текущих каротажных работ. Способ 400 может быть выполнен, например, компьютером 102 на поверхности (что показательно также для компьютерной системы 43 и(или) компьютеризованных средств 45 каротажа) и(или) контроллером 144. Как показано на фигуре, способ 400 включает сбор данных измерений, относящихся к пласту, с каротажного прибора (блок 402). В блоке 404 параметр управления для текущих каротажных работ настраивается по меньшей мере частично на основании собранных данных измерений и механизма адаптивного обучения, применяемого каротажным прибором. В качестве примера: настройка параметра управления в блоке 404 может соответствовать настройке скорости перемещения каротажного прибора. В качестве еще одного примера: настройка параметра управления в блоке 404 может соответствовать настройке управляющего параметра каротажных работ, такого как уровень мощности исходного сигнала, частота исходного сигнала, усреднённая длина окна, ориентация антенны с синтезированной апертурой, фазовый сдвиг и(или) параметр инверсии. В качестве еще одного примера: настройка параметра управления в блоке 404 может соответствовать настройке управляющего параметра каротажных работ, такого как набор частот каротажа, уставка передатчика, уставка приемника и(или) значение начального приближения. В качестве еще одного примера: настройка параметра управления в блоке 404 может соответствовать настройке управляющего параметра обработки, такого как многокомпонентный обобщенный параметр, обобщенный параметр угла наклона и(или) параметр задержки виртуальной антенны. В качестве еще одного примера: настройка параметра управления в блоке 404 может соответствовать настройке управляющего параметра обработки, такого как параметр фильтрации шумов, параметр тригонометрической подгонки, параметр поправки на температуру, параметр специализации программного обеспечения, параметр устранения эффекта рогов поляризации, параметр поправки на влияние скважины и(или) параметр калибровки.
В некоторых вариантах реализации изобретения способ 400 включает дополнительные этапы. Например, способ 400 может включать этап хранения необработанных данных, обработанных сигналов, параметров каротажа, параметров инверсии и параметров визуального представления в базе данных и оценку информации, хранимой в базе данных для определения правил для механизма адаптивного обучения. В качестве еще одного примера: способ 400 может включать этапы получения оценки качества данных от оператора по меньшей мере для некоторых доступных необработанных данных, обработанных данных, параметров каротажа, параметров инверсии и параметров визуального представления, а также использование оценки качества данных для определения правил механизма адаптивного обучения. В качестве еще одного примера: способ 400 может включать этап применения фильтра к информации, хранимой в базе данных, при этом фильтр применяет нейронную сеть или операции многомерной интерполяции/экстраполяции. Кроме того, способ 400 может включать этап выбора входных данных и(или) правил для механизма адаптивного обучения каротажного прибора по меньшей мере частично на основании визуального представления пласта.
В некоторых вариантах реализации изобретения способ 400 включает дополнительные этапы для управления ограничениями передачи данных. Например, способ 400 может включать настройку механизмом адаптивного обучения на количество многочисленных типов собранных данных, передаваемых с каротажного прибора компьютеру на поверхности во время текущих каротажных работ. В качестве еще одного примера: способ 400 может включать настройку механизмом адаптивного обучения формата кодирования/декодирования для данных, передаваемых с каротажного прибора компьютеру на поверхности во время текущих каротажных работ. В качестве еще одного примера: способ 400 может включать настройку механизмом адаптивного обучения объема выполняемой обработки многочисленных типов собранных данных, а также настройку на количества многочисленных типов обработанных данных, передаваемых с каротажного прибора компьютеру на поверхности во время текущих каротажных работ.
В некоторых вариантах реализации изобретения оператор может выполнять временную или постоянную отмену ранее полученных правил или усвоенных действий механизма адаптивного обучения. Иначе говоря, оператор может непосредственно давать указания для каротажного прибора предоставить любой из раскрытых параметров управления и(или) выполнить любое из раскрытых действий рабочего процесса каротажа. Следует, однако, понимать, что оператор и механизм адаптивного обучения могут действовать одновременно. Например, в некоторых вариантах реализации изобретения определенные параметры управления и(или) действия выбираются оператором, тогда как другие параметры управления и(или) действия выбираются механизмом адаптивного обучения.
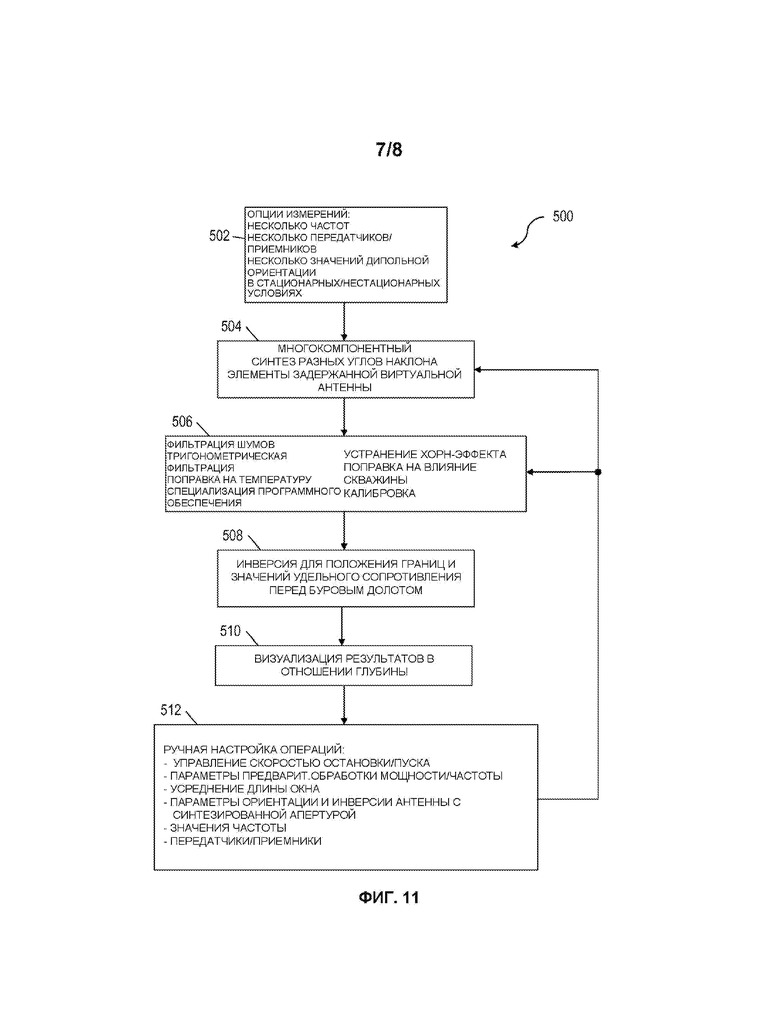
На Фиг. 11 показаны компоненты другого иллюстративного способа 500 настройки рабочего процесса для текущих каротажных работ. Способ 500 может быть выполнен, например, компьютером 102 на поверхности (что показательно также для компьютерной системы 43 и(или) компьютеризованных средств 45 каротажа) и(или) контроллером 144. Следует понимать, что в различных вариантах реализации изобретения порядок следования этапов в способе 500 может изменяться и что этапы могут быть пропущены. В блоке 502 сигналы принимаются на нескольких частотах и в нескольких комбинациях передатчика/приемника (иногда называемых каналами). При получении сигналов может быть также задействовано несколько вариантов ориентации антенн. В случае с прибором измерения КВБ производятся во время вращения прибора, что обеспечивает возможность выполнения нескольких измерений с разными углами вращения. В случае если приборы имеют чувствительность к азимуту, как, например, наклонная антенна, катушка либо индукционные катушки в направлении X или Y (радиально ориентированные), то при разных углах вращения будут собраны разные данные (например, несколько значений дипольной ориентации). Помимо этого, измерения КВБ могут производиться либо во время бурения, либо после прекращения бурения.
После того как данные в блоке 502 накоплены, выполняется их обработка в блоке 504. По меньшей мере в некоторых вариантах реализации изобретения этап обработки в блоке 504 включает выполнение многокомпонентного обобщения. Во многокомпонентном обобщении данные из измерений, произведенных при разных значениях ориентации и(или) разных значениях дипольной ориентации, комбинируются для целей создания синтетических данных, имитируемых многокомпонентным прибором. Этап обработки в блоке 504 также может включать выполнение обобщения разных углов наклона. В процессе этого измерения, произведенные с определенными углами наклона передающей или приемной антенны, могут обрабатываться для получения другого синтезированного угла наклона. В этом процессе используется комбинация двух или более линейно независимых антенн для обеспечения необходимой ориентации. В комбинации крестообразных антенн, например, результаты могут быть добавлены для получения компонента в направлении Z либо могут быть вычтены для получения радиального компонента. В зависимости от способа обработки сигналов антенн могут быть получены разные углы наклона.
Этап обработки в блоке 504 также может включать выполнение действий с элементами задержанной виртуальной антенны. В данной опции измерения производятся на указанной глубине, после чего каротажный прибор перемещается. После перемещения каротажного прибора дополнительные измерения производятся на другой глубине. Далее эти два измерения комбинируются и используются так, как если бы они были выполнены одновременно. В этом процессе передающая антенна иногда используется на одной глубине, а позднее - как приемная антенна на другой глубине. Таким способом синтезируются конфигурации каротажа, которые в иных случаях невозможны на одной и той же глубине.
Дальнейшая обработка данных может производиться в блоке 506. Например, этап обработки в блоке 506 может включать фильтрование шумов, что делает возможным устранять эффект рогов поляризации и выполнять тригонометрическую подгонку. Если данные принимаются прибором КВБ при разных углах вращения, данные, получаемые с каждым сигналом, выявляются как комбинация синусоидальных сигналов. Если имеется несколько разных углов вращения и сбор данных выполняется с разных углов вращения, генерируется большой объем данных. Например, если использовано 32 бина для углов вращения, наверх из забоя будет передано 32 числа. Вследствие такого большого объема информации может быть предпочтительным уменьшение объема обрабатываемых или передаваемых данных. Помимо этого, различные бины могут включать некоторые шумы в данных. Эта проблема может быть решена посредством аппроксимации синусоидальной функции для данных в разных бинах, поскольку априори известно, что она должна быть подобна синусоиде. Если для этих данных выполнена аппроксимация синусоиды, наверх из забоя передается только одно число. Данная функция таким образом уменьшает объем данных, передаваемых наверх из забоя, так как все из этих бинов сводятся только к одному числу или двум числам (например, к значениям амплитуды и фазы синусоиды). Тригонометрическая подгонка обеспечивает возможность снижения общего объема данных, что упрощает их обработку, передачу и выполнение снижения шумов.
По меньшей мере в некоторых вариантах реализации изобретения этап в блоке 506 также может включать выполнение обработки инверсии для корректировки искажений каротажных данных. Например, если известна величина удельного сопротивления раствора (например, вследствие того, что известен прокачиваемый раствор или вследствие того, что замерено удельное сопротивление бурового шлама и раствора) и известен диаметр скважины (например, путем измерения диаметра скважины кавернометрами), такая информация может быть использована для корректировки искажений каротажных данных.
По меньшей мере в некоторых вариантах реализации изобретения этап в блоке 506 также может включать выполнение поправок на температуру. Например, таблицы расчетных поправок могут быть откалиброваны с помощью процедуры калибровки, выполняемой на поверхности. Для процедуры калибровки одна секция прибора помещается в печь и нагревается для получения ее температурной характеристики. Температурная характеристика аппроксимируется к многочлену и впоследствии используется в забое. Даже при наличии температурного датчика для данных температуры в забое может потребоваться корректировка с помощью таких таблиц расчетных поправок. Другим способом выполнения калибровки температуры является использование компенсированного соотношения нескольких приемников и нескольких передатчиков.
По меньшей мере в некоторых вариантах реализации изобретения этап в блоке 506 также может включать выполнение специализации программного обеспечения, представляющее собой процедуру, в которой используется несколько измерений на разных глубинах. Эти различные измерения комбинируются с разными значениями глубины изыскания и с разными значениями вертикального разрешения для получения научных измерений необходимой глубины изыскания и(или) вертикального разрешения. Такой процесс обеспечивает возможность комбинирования разных измерений и характеристик для получения нового измерения с предпочтительными характеристиками.
В блоке 508 выполняются операции инвертирования. Например, инверсия может быть выполнена для положения границ и значений удельного сопротивления перед реперной точкой (например, долотом или другой реперной точкой на каротажном приборе). Затем в блоке 510 результаты визуализируются в отношении глубины для определения тенденций данных. Результатом этапа в блоке 510, например, является визуальное представление пласта для разных частот, для нескольких передатчиков и приемников и(или) для нескольких углов вращения. В процессе обработки данных может быть получено несколько результатов. Некоторые из этих результатов будут достовернее других в зависимости от условий. Оператор, выполняющий ручную обработку инверсии, может просматривать результаты и определять, какие из них наиболее точные, на основании своего опыта и в зависимости от условий.
В блоке 512 оператор просматривает результаты и может настраивать несколько опций каротажа на основании просмотра. Например, оператор может настраивать параметры операции бурения. В частности, если измерения снимались в нестационарных условиях, оператор может создать стационарные условия для улучшения результатов. Кроме того, оператор может снижать скорость вращения и может выполнять переключение мощности на различные уровни, если посчитает, что уровни сигналов слишком низкие или если результаты не удовлетворительны вследствие уровня сигнала. Оператор может также переключать частоты на различные значения. Например, оператор может выполнять переключение на пониженные частоты для улучшения результатов. Помимо этого, оператор может изменять параметры обработки, подаваемые назад в блоки 504, 506 и 508. Например, оператор может изменять порядок выполнения многокомпонентной обработки путем изменения используемых значений кратности тензора удельного сопротивления. Кроме того, оператор может изменять усредненную длину окна при наличии каких-либо шумов, которые могут быть устранены путем фильтрации. Кроме того, оператор может изменять входные данные инверсии, такие как используемые приемная и передающая антенны, а также компоненты тензора или углы наклона. Кроме того, оператор может изменять начальное приближение для улучшения результатов, если он имеет представление о возможных результатах. Оператор также может определять количество повторов, выполняемых до достижения удовлетворительных результатов.
На Фиг. 12 показаны компоненты еще одного иллюстративного способа 600 настройки рабочего процесса для текущих каротажных работ. Способ 600 может быть выполнен, например, компьютером 102 на поверхности (что показательно также для компьютерной системы 43 и(или) компьютеризованных средств 45 каротажа) и(или) контроллером 144. В способе 600 выполняются этапы способа 500. Помимо этого, способ 600 обеспечивает возможность автоматической настройки операций каротажа, обработки, инверсии и(или) визуализации в блоке 610. Например, выполнение программы механизма адаптивного обучения может быть сохранено в аппаратном или программном обеспечении и использовано в забое для обеспечения возможности такой автоматизации. При помощи такого выполнения программы сбор, обработка и передача данных на поверхность могут осуществляться более эффективно без вмешательства пользователя. Например, выполнение программы механизма адаптивного обучения может выбирать для использования следующую оптимальную частоту на основании текущих уровней сигналов, получаемых на текущей частоте. В качестве еще одного примера: процесс выполнения программы механизма адаптивного обучения может выбирать углы наклона антенны с синтезированной апертурой для минимизации нежелательных сигналов с одновременной оптимизацией сигнала от слоев, находящихся перед долотом. В качестве еще одного примера: выполнение программы механизма адаптивного обучения может отменять неправильные точки замеров, на которые повлияли шумы, и применять инверсию только на основании правильных точек замеров. В качестве еще одного примера: процесс выполнения программы механизма адаптивного обучения может настраивать параметры каротажа, связанные с телеметрией, например, то, какие данные будут отправляться на поверхность. Благодаря этому возможна оптимизация пропускной способности канала передачи данных с одновременным предоставлением наиболее подходящих результатов оператору.
По меньшей мере в некоторых вариантах реализации изобретения такое выполнение программы механизма адаптивного обучения и соответствующие настройки в блоке 610 основаны на своде правил, задающих значения параметров управления, применяемых к любому данному сигналу или результатам прошлой инверсии. В способе 600 такие правила генерируются в блоке 608. В частности, эти правила могут быть основаны на операциях фильтрации, выполняемых в блоке 606. Например, операции фильтрации могут применять пределы, такие как минимальное и максимальное значения, или могут применять более сложные алгоритмы принятия решений, такие как нейронные сети, поиск по таблицам или многомерная интерполяция/экстраполяция. В некоторых вариантах реализации изобретения правила и связанные с ними параметры корректируются во время текущих каротажных работ или после завершения каротажных работ посредством процесса машинного самообучения или статистического исследования данных, которое включает полученные сигналы, выбранные параметры, полученные результаты инверсии и(или) информацию о качестве обработки данных от оператора.
В некоторых вариантах реализации изобретения операции фильтрации в блоке 606 зависят от информации об операциях в базе данных в блоке 602 и неавтоматизированной информации о качестве обработки данных в блоке 604. Для выполнения операций в базе данных в блоке 602 производится сбор данных в большую базу данных, включающую большое количество (например, всех имеемых) точек измерений и большое количество (например, всех имеемых) скважино-операций в данном геологическом районе. Для повышения адаптируемости может быть включено нескольких геологических районов. Операции в базе данных в блоке 602 способствуют определению результатов инверсии высшего качества для любого данного сигнала. В некоторых вариантах реализации изобретения объем данных, предоставляемых для системы машинного самообучения, увеличивается с помощью неавтоматизированной информации о качестве обработки данных о параметрах каротажа, инверсии и(или) визуализации в блоке 604 (такая неавтоматизированная обратная связь обеспечивает дополнительные элементарные события для операций машинного самообучения). В некоторых вариантах реализации изобретения автоматизированный рабочий процесс или управление адаптивным обучением, как в способе 600, могут быть динамически активизированы или деактивизированы на основании вводимых пользователем данных. Кроме того, этапы автоматизированного управления рабочим процессом могут варьироваться на основании вводимых пользователем данных. Для условий, которые являются новыми по сравнению с уже существующими в базе данных, неавтоматизированная обратная связь в блоке 604 является более пригодной и может получать более высокий приоритет по сравнению с настройками, предлагаемыми операциями в базе данных в блоке 602.
Также возможно упростить процесс обучения и применения правил, сначала выбирая в базе данных сигналы, ближайшие к полученному сигналу, затем применяя параметры, предоставленные и отмеченные оператором как оптимальные, при наличии таковых. Также оператор может выполнять ручной поиск по параметрам для достижения оптимальной инверсии и для обеспечения обратной связи по результатам, полученным в ходе процесса, для содействия совершенствованию операций в базе данных в блоке 602. В такой обратной связи задействуется просмотр нескольких значений в базе данных с одинаковым набором данных, однако с разными параметрами обработки и визуализации, а также обеспечивается обратная связь по качеству каждого соответствующего результата.
По меньшей мере в некоторых вариантах реализации изобретения база данных, правила автоматизации и(или) алгоритм настроек постоянно находятся в скважинной системе, а неавтоматизированная обратная связь обеспечивается с поверхности в скважинную систему по скважинным коммуникационным линиям. В еще одном варианте реализации изобретения база данных и система обучения постоянно находятся на поверхности, однако правила постоянно находятся внутри скважины. Следовательно, различные варианты реализации изобретения могут варьироваться в отношении объема скважинных коммуникационных линий и коммуникационных линий на поверхности, необходимых для операций управления рабочим процессом каротажа. В еще одном варианте реализации изобретения обратная связь с пользователем обеспечивается только в рамках корректирующих действий, таких как выбор оптимальных параметров для использования для предыдущего набора данных. В подобном случае обучение выполняется на основании фактора качества, получаемого из разницы между параметрами, выводимыми системой автоматической настройки, и параметрами, о которых оператор извещает как об оптимальных.
Различные варианты реализации настоящего изобретения, описанные выше, могут быть применены с различными типами измерений по результатам просмотра впереди бурового долота или вокруг бурового долота без отхода от принципов настоящего изобретения. Кроме того, раскрытые опции управления рабочим процессом каротажа являются не более чем примерами и не сводят варианты реализации изобретения к какой-либо особой приведенной детали. Несомненно, что специалисту в данной области техники, который детально ознакомился с вышеприведенным описанием типичных вариантов реализации изобретения, должно быть понятно, что в конкретных вариантах изобретения могут быть выполнены многочисленные модификации, дополнения, замены, исключения и другие изменения, и такие изменения предполагаются в соответствующих принципах настоящего изобретения.


Изобретение относится к способу и системе управления рабочим процессом каротажа с использованием механизма адаптивного обучения, применяемого в забое и(или) на поверхности. Техническим результатом является повышение эффективности управления рабочим процессом каротажа. Способ включает измерение характеристик пласта с помощью каротажного прибора, размещенного в стволе скважины, сбор данных измерений, соответствующих измеренным характеристикам пласта, генерирование визуального представления пласта с помощью собранных данных измерений, настройку управляющего параметра каротажных работ каротажного прибора на основании по меньшей мере некоторых данных измерений и механизма адаптивного обучения внутри каротажного прибора, и отбор обновлений для механизма адаптивного обучения по меньшей мере частично на основании визуального представления. 3 н. и 25 з.п. ф-лы, 12 ил.
ИЗМЕНЕННАЯ ФОРМУЛА ИЗОБРЕТЕНИЯ,
ПРЕДЛОЖЕННАЯ ЗАЯВИТЕЛЕМ ДЛЯ РАССМОТРЕНИЯ
1. Способ каротажных работ, включающий:
измерение характеристик пласта с помощью каротажного прибора, размещенного в стволе скважины;
сбор данных измерений, соответствующих измеренным характеристикам пласта;
генерирование визуального представления пласта с помощью собранных данных измерений,
настройку управляющего параметра каротажных работ каротажного прибора на основании по меньшей мере некоторых данных измерений и механизма адаптивного обучения внутри каротажного прибора, и
отбор обновлений для механизма адаптивного обучения по меньшей мере частично на основании визуального представления.
2. Способ по п. 1, отличающийся тем, что настройка управляющего параметра каротажного прибора включает настройку скорости перемещения каротажного прибора.
3. Способ по п. 1, отличающийся тем, что настройка управляющего параметра каротажного прибора включает настройку управляющего параметра каротажных работ, выбираемого из перечня, содержащего уровень мощности исходного сигнала, частоту исходного сигнала, усредненную длину окна, ориентацию антенны с синтезированной апертурой, фазовый сдвиг и параметр инверсии.
4. Способ по п. 1, отличающийся тем, что настройка управляющего параметра каротажного прибора включает настройку управляющего параметра каротажных работ, выбираемого из перечня, содержащего набор частот каротажа, уставку передатчика, уставку приемника и значение начального приближения.
5. Способ по п. 1, отличающийся тем, что настройка управляющего параметра каротажного прибора включает настройку на количество многочисленных типов собранных данных, передаваемых с каротажного прибора компьютеру на поверхности во время каротажных работ.
6. Способ по п. 1, отличающийся тем, что настройка управляющего параметра каротажного прибора включает настройку формата кодирования/декодирования для данных, передаваемых с каротажного прибора компьютеру на поверхности во время каротажных работ.
7. Способ по п. 1, отличающийся тем, что настройка управляющего параметра каротажного прибора включает настройку на количество обработок многочисленных типов собранных данных для осуществления и настройки на количество многочисленных типов обработанных данных, передаваемых с каротажного прибора компьютеру на поверхности во время каротажных работ.
8. Способ по п. 1, дополнительно включающий обработку собранных данных измерений, и отличающийся тем, что настройка управляющего параметра прибора включает настройку управляющего параметра обработки, выбираемого из перечня, содержащего многокомпонентный обобщенный параметр, обобщенный параметр угла наклона и параметр задержки виртуальной антенны.
9. Способ по п. 1, дополнительно включающий обработку собранных данных измерений, и отличающийся тем, что настройка управляющего параметра прибора включает настройку управляющего параметра обработки, выбираемого из перечня, содержащего параметр фильтрации шумов, параметр тригонометрической подгонки, параметр поправки на температуру, параметр специализации программного обеспечения, параметр устранения эффекта рогов поляризации, параметр поправки на влияние скважины и параметр калибровки.
10. Способ по п. 1, дополнительно включающий хранение в базе данных необработанных данных, обработанных сигналов, параметров каротажа, параметров инверсии и параметров визуального представления, а также оценку информации, хранимой в базе данных, для определения правил для механизма адаптивного обучения.
11. Способ по п. 10, дополнительно включающий получение оценки качества данных от оператора по меньшей мере для некоторых необработанных данных, обработанных сигналов, параметров каротажа, параметров инверсии и параметров визуального представления, а также применение оценки качества данных для определения указанных правил.
12. Способ по п. 10, дополнительно включающий применение фильтра к информации, хранимой в базе данных, при этом фильтр применяет нейронную сеть либо операции многомерной интерполяции/экстраполяции.
13. Способ по любому из пп. 1-9, в котором визуальное представление отображает характеристики пласта в виде функции глубины.
14. Система для каротажных работ, содержащая:
каротажный прибор, осуществляющий сбор данных измерений;
компьютер на поверхности с одним или более процессорами и с пользовательским интерфейсом; и
интерфейс коммуникации между каротажным прибором и компьютером на поверхности, в котором компьютер на поверхности отображает визуальное представление пласта в пользовательском интерфейсе, при этом визуальное представление основано на собранных данных, и
машиночитаемое устройство хранения данных, в котором хранится программное обеспечение управления рабочим процессом каротажа, которое, при выполнении одним или более процессорами, выбирает одно или более входных данных для механизма адаптивного обучения внутри каротажного прибора по меньшей мере частично на основании параметров визуального представления.
15. Система по п. 14, отличающаяся тем, что механизм адаптивного обучения вызывает настройку параметра скорости каротажных работ по меньшей мере частично на основании одного или более выбранных входных данных.
16. Система по п. 14, отличающаяся тем, что механизм адаптивного обучения вызывает настройку по меньшей мере одного из последующих: параметра уровня мощности исходного сигнала, параметра частоты исходного сигнала, параметра усредненной длины окна, параметра ориентации антенны с синтезированной апертурой и параметра инверсии для каротажных работ по меньшей мере частично на основании одного или более выбранных входных данных.
17. Система по п. 14, отличающаяся тем, что механизм адаптивного обучения вызывает настройку по меньшей мере одного из последующих: параметра набора частот каротажа, параметра уставки передатчика, параметра уставки приемника и параметра значения начального приближения для каротажных работ по меньшей мере частично на основании одного или более выбранных входных данных.
18. Система по п. 14, отличающаяся тем, что механизм адаптивного обучения вызывает настройку по меньшей мере одного из последующих: многокомпонентного обобщенного параметра, обобщенного параметра угла наклона и параметра задержки виртуальной антенны для каротажных работ по меньшей мере частично на основании одного или более выбранных входных данных.
19. Система по п. 14, отличающаяся тем, что механизм адаптивного обучения вызывает настройку по меньшей мере одного из последующих: параметра фильтрации шумов, параметра тригонометрической подгонки, параметра поправки на температуру, параметра специализации программного обеспечения, параметра устранения эффекта рогов поляризации, параметра поправки на влияние скважины и параметра калибровки для каротажных работ по меньшей мере частично на основании одного или более выбранных входных данных.
20. Система по п. 14, отличающаяся тем, что программное обеспечение управления рабочим процессом каротажа, при выполнении одним или более процессорами, вызывает сохранение в базе данных необработанных данных, обработанных сигналов, параметров каротажа, параметров инверсии и параметров визуального представления, а также их оценку для определения правил для механизма адаптивного обучения.
21. Система по п. 20, отличающаяся тем, что программное обеспечение управления рабочим процессом каротажа, при выполнении одним или более процессорами, приводит к определению правил частично на основании оценки оператором качества данных по меньшей мере для некоторых необработанных данных, обработанных сигналов, параметров каротажа, параметров инверсии и параметров визуального представления.
22. Система по п. 20, отличающаяся тем, что программное обеспечение управления рабочим процессом каротажа, при выполнении одним или более процессорами, вызывает определение правил частично на основании фильтра данных, который применяет нейронную сеть либо операции многомерной интерполяции/экстраполяции.
23. Система по п. 20, отличающаяся тем, что правила вызывают настройку механизмом адаптивного обучения на количество многочисленных типов собранных данных, передаваемых с каротажного прибора компьютеру на поверхности во время каротажных работ.
24. Система по п. 20, отличающаяся тем, что правила вызывают настройку механизмом адаптивного обучения формата кодирования/декодирования данных, передаваемых каротажным прибором компьютеру на поверхности во время каротажных работ.
25. Система по п. 20, отличающаяся тем, что правила вызывают настройку механизмом адаптивного обучения объема выполняемой обработки многочисленных типов собранных данных и настройку на количество многочисленных типов обработанных данных, передаваемых с каротажного прибора компьютеру на поверхности во время каротажных работ.
26. Система для каротажных работ, содержащая:
один или более процессоров;
пользовательский интерфейс, функционирующий с одним или более процессорами; и
машиночитаемое устройство, хранения данных в котором хранится программное обеспечение управления рабочим процессом каротажа, выполнение которого одним или более процессорами, оно вызывает выполнение одним или более процессорами:
сбора данных измерений, соответствующих измеренным характеристикам пласта ;
отбора обновлений для механизма адаптивного обучения по меньшей мере частично на основании визуального представления.
настройки управляющего параметра операций каротажа, выполняемых каротажным прибором, на основании по меньшей мере некоторых данных измерений и механизма адаптивного обучения, причем одно или более правил для механизма адаптивного обучения установлены на основании входных данных, полученных посредством пользовательского интерфейса в ответ на визуализацию данных измерений.
27. Система по п. 26, отличающаяся тем, что каротажный прибор осуществляет сбор данных, соответствующих данным измерений перед буровым долотом или вокруг него.
28. Система по п. 26, дополнительно содержащая устройство ввода, пригодное к функционированию с пользовательским интерфейсом для обеспечения пользователя возможностью выполнять переключения между различными характеристиками управления рабочим процессом каротажа, активизировать различные характеристики управления рабочим процессом каротажа или деактивизировать различные характеристики управления рабочим процессом каротажа
По доверенности
| ПРИБОРЫ КАРОТАЖА СОПРОТИВЛЕНИЙ С НЕСУЩИМИ СЕГМЕНТИРОВАННЫМИ АНТЕННАМИ, ОБЛАДАЮЩИМИ АЗИМУТАЛЬНОЙ ЧУВСТВИТЕЛЬНОСТЬЮ, И СПОСОБЫ ИХ ИЗГОТОВЛЕНИЯ | 2007 |
|
RU2475645C2 |
| US 20130124176 A1, 16.05.2013 | |||
| Каротажный подъемник | 1986 |
|
SU1448034A1 |
| US 20100147510 A1, 17.06.2010 | |||
| US 20040020653 A1, 05.02.2004. | |||

