РОДСТВЕННАЯ ЗАЯВКА
По настоящей заявке испрашивается приоритет на основании предварительной заявки на патент США № 61/443757 под названием "Method and System for Iris Recognition and Face Acquisition", поданной 17 февраля 2011 г., и предварительной заявки на патент № 61/472279 под названием "Efficient Method and System for the Acquisition of Scene Imagery and Iris Imagery using a Single Sensor", поданной 6 апреля 2011 г., обе из которых включены в настоящий документ путем ссылки в полном объеме для всех целей.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к технологиям обработки изображений, и более конкретно к системам и способам получения изображения сцены и изображения радужной оболочки с использованием одного датчика.
УРОВЕНЬ ТЕХНИКИ
Как правило, биометрические системы разрабатываются для получения оптимальных изображений с учетом конкретных ограничений, связанных с типом рассматриваемой биометрии. Если должны быть получены другие данные (например, изображение лица или окружающего фона), то обычно используются разные датчики, так как требования к различным типам изображений сильно отличаются. Однако, такой подход увеличивает стоимость общего решения и может также увеличивать размер или место для установки системы.
Публикация заявки на патент США 20060050933, Adam и др., направлена на решение проблемы получения данных для использования при распознавании лица и радужной оболочки, используя один датчик, но не рассматривает проблему оптимизации получения изображений, так чтобы полученные данные являлись оптимальными для каждого из компонент при распознавании лица и радужной оболочки отдельно.
Публикация заявки на патент США 20080075334, Determan и др., и публикация заявки на патент США 20050270386, Saitoh и др., раскрывают получение изображений лица и радужной оболочки, используя отдельный датчик для лица и отдельный датчик для радужной оболочки. Saitoh описывает способ распознавания радужной оболочки, который содержит идентификацию положения радужной оболочки, используя изображение лица и радужной оболочки, но использует два отдельных датчика, которые фокусируются отдельно на лице и радужной оболочке, соответственно, и получает данные одновременно, так что движение пользователя не создает проблем.
Публикация заявки на патент США 20080075334, Determan и др., также обсуждает использование одного датчика как для лица, так и для радужной оболочки, но не рассматривает проблемы оптимизации получения изображений, так чтобы полученные данные были оптимальны для каждого из компонент распознавания лица и радужной оболочки отдельно.
Публикация заявки на патент США 20070206840, Jacobson и др., также описывает систему, которая содержит получение изображения лица и радужной оболочки, но не рассматривает проблему оптимизации получения изображений, так чтобы полученные данные были оптимальны для каждого из компонент распознавания лица и радужной оболочки отдельно, и не рассматривает, как может быть получена компактная по размерам система.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В конкретных вариантах здесь описаны способы и системы для получения высококачественного изображения радужной оболочки для биометрической идентификации и высококачественного изображения любой другой сцены, такой как лицо человека, с помощью одного датчика. Варианты осуществления этих систем и способов могут использоваться, таким образом, что изображение получается одним датчиком для цели определения или подтверждения личности конкретного человека, используя биометрическое распознавание по радужной оболочке, а также для целей получения общего изображения сцен, таких как лица и окружающая обстановка. Изображение последнего типа может обычно быть получено, например, пользователем мобильного телефона. Также, раскрытые способы и системы могут быть введены в состав мобильных и/или компактных устройств. Датчик может быть датчиком на основе комплементарной структуры «металл-оксид-проводник» (CMOS) или другим подходящим типом устройства для получения изображения. Способы и системы могут конфигурировать или корректировать режимы, так чтобы они были близки к оптимальным в двух режимах получения изображений, например, в режиме получения изображений радужной оболочки и режиме получения изображения (например, отличного от радужной оболочки). В некоторых вариантах осуществления системы для получения таких изображений, осуществляемые, например, в устройстве, могут дать значительное уменьшение физического размера или места, по сравнению, например, с устройствами, использующими множество датчиков.
В одном из вариантов изобретения описан способ получения изображений радужной оболочки и сцены, используя один датчик изображения. Способ может содержать получение датчиком изображения сцены и изображения радужной оболочки по меньшей мере в одном изображении. Модуль обработки изображений может применить уровень шумоподавления к первому участку этого по меньшей мере одного изображения, чтобы создать изображение сцены. Модуль обработки изображений может применить пониженный уровень шумоподавления ко второму участку этого по меньшей мере одного изображения, чтобы создать изображение радужной оболочки для использования при биометрической идентификации.
В некоторых вариантах осуществления датчик изображения может получать изображение сцены и изображение радужной оболочки как отдельные компоненты в пределах одного изображения. Датчик изображения может получить по меньшей мере одно изображение радужной оболочки, освещая радужную оболочку инфракрасным светом. В некоторых вариантах осуществления датчик изображения может активировать множество узлов датчика изображения. Первый поднабор узлов датчика может быть выполнен главным образом с возможностью получения изображения радужной оболочки, пригодного для биометрической идентификации. Второй поднабор узлов датчика может быть выполнен главным образом с возможностью получения изображения, отличного от радужной оболочки.
В некоторых вариантах осуществления модуль обработки изображений может применять шумоподавление, содержащее усреднение или медианную функцию. Модуль обработки изображений может применить шумоподавление, содержащее ослабление как и зависимого от времени, так и независимого от времени шума в полученном изображении. Модуль обработки изображений может вычитать шум, полученный из одного изображения радужной оболочки с шумом, из другого изображения радужной оболочки. В некоторых вариантах осуществления модуль обработки изображений может уменьшать окружающий шум в одном изображении, используя окружающий шум из другого изображения. Модуль обработки изображений может уменьшать окружающий шум, полученный из одного изображения в присутствии инфракрасного освещения, используя окружающий шум из другого изображения, полученного без инфракрасного освещения. Модуль обработки изображений может выполнять регулирование усиления или яркости на втором участке по меньшей мере одного изображения, чтобы создать изображение радужной оболочки для использования при биометрической идентификации.
В другом варианте изобретения описано устройство для получения изображений радужной оболочки и сцены с использованием одного датчика изображения. Устройство может содержать датчик изображения и модуль обработки изображений. Датчик изображения может получать изображение сцены и изображение радужной оболочки по меньшей мере в одном изображении. Модуль обработки изображений может применять уровень шумоподавления к первому участку по меньшей мере одного изображения, чтобы создать изображение сцены. Модуль обработки изображений может применять пониженный уровень шумоподавления ко второму участку по меньшей мере одного изображения, чтобы создать изображение радужной оболочки для использования при биометрической идентификации.
В некоторых вариантах осуществления датчик изображения получает изображение сцены и изображение радужной оболочки как отдельные компоненты в пределах одного изображения. Датчик изображения может содержать, например, датчик, использующий комплементарную МОП-структуру (CMOS). Датчик изображения может содержать множество узлов датчика, причем первый поднабор главным образом выполнен с возможностью получения изображения радужной оболочки, пригодного для биометрической идентификации, а второй поднабор узлов датчика выполнен главным образом с возможностью получения изображения, отличного от радужной оболочки. В некоторых вариантах осуществления устройство содержит светильник для освещения радужной оболочки инфракрасным светом, в котором датчик изображения получает по меньшей мере одно изображение освещенной радужной оболочки.
В некоторых вариантах осуществления применяемое шумоподавление содержит приложение к полученному изображению усреднения или медианной функции. Шумоподавление может содержать снижение как зависимого от времени, так и независимого от времени шума в полученном изображении. В некоторых вариантах осуществления модуль обработки изображений вычитает шум, полученный из одного изображения радужной оболочки с шумом, из другого изображения радужной оболочки. Модуль обработки изображений может уменьшить окружающий шум одного изображения, полученного в присутствии инфракрасного освещения, используя окружающий шум из другого изображения, полученного без инфракрасного освещения. В некоторых вариантах осуществления модуль обработки изображений выполняет регулирование усиления или яркости на втором участке по меньшей мере одного такого изображения, чтобы создать изображение радужной оболочки для использования при биометрической идентификации.
Некоторые варианты осуществления способов и систем, раскрытые здесь, могут решать различные проблемы при получении высококачественных изображений сцены, а также высококачественных изображений радужной оболочки с одним датчиком. Например, одна проблема, возможно, неожиданно, касается управления шумовыми свойствами датчика. Мы обнаружили, что требования к качественным изображениям для распознавания радужной оболочки и стандартных сцен иногда входят в противоречие в отношении шума. Шум может представить большой интерес, так как пиксельные размеры датчиков изображения становятся все меньше и меньше и, таким образом, основные уровни помех в каждом пикселе увеличиваются или становятся более явными. Мы определили, что определенные типы шума могут фактически быть предпочтительными или допустимыми для распознавания радужной оболочки, например, по сравнению с качеством изображений радужной оболочки, полученных в стандартных режимах получения изображения, которые содержит шумоподавление. Кроме того, мы можем предпочесть, возможно, парадоксально, сохранять шум в обработанном изображении во время получения изображения радужной оболочки, чтобы улучшить характеристики идентификации радужной оболочки по сравнению с изображениями, которые подверглись типичному шумоподавлению.
Другая проблема касается длины волны освещения, требуемого для стандартного изображения и для изображения радужной оболочки. При получении изображения радужной оболочки обычно используют инфракрасное освещение, тогда как получение стандартного изображения обычно зависит от видимого освещения. Эти случаи могут рассматриваться как конфликтующие ограничения, если они содержатся в одной системе для получения обоих типов изображений. Настоящее раскрытие описывает несколько подходов к решению этих проблем. Например, и как показано в вариантах осуществления, перед датчиком могут чередоваться различные фильтры. Фильтры могут иметь разные характеристики для инфракрасного и видимого света. Фильтры RGB (красный, зеленый, синий) и структуры фильтров могут приспосабливаться для использования в различных вариантах осуществления. Например, в некоторых вариантах осуществления, системы и способы могут чередовать фильтры, который пропускают инфракрасный свет, с другими фильтрами, которые служат, прежде всего, для пропускания цветного изображения. Примеры этого подхода представлены в публикации заявки на патент США 2007/0145273 и в публикации заявки на патент США 2007/0024931. Достижение улучшения при этих подходах содержит использование чередующейся матрицы R,G,(G+I),B (где I представляет инфракрасный свет). Такой подход может иметь преимущество сохранения или восстановления полной разрешающей способности зеленого (G) сигнала, к которому система зрения человека наиболее чувствительна. Другой вариант осуществления способов и систем решает эту проблему, используя съемный или убирающийся фильтр подавления инфракрасного света, который может автоматически или вручную располагаться перед датчиком во время стандартного режима получения изображений. В еще одном другом варианте осуществления системы и способы могут накладывать фильтр подавления инфракрасного света только на какой-то участок датчика изображения, который назначен для распознавания радужной оболочки.
Описанные здесь варианты осуществления систем и способов могут решать третью проблему, касающуюся ухудшения изображения за счет фонового освещения. В некоторых вариантах осуществления, где инфракрасная фильтрация или освещение не оптимальны, во время получения изображения радужной оболочки могут наблюдаться изображения окружающей сцены, отраженные от роговицы или поверхности глаза. Это может иногда сильно влиять на характеристики распознавания радужной оболочки. Варианты осуществления систем и способов, описанные здесь, могут получить по меньшей мере два изображения. Одно из изображений может быть получено с использованием управляемого включения инфракрасного освещения и по меньшей мере второе изображение может быть получено при управляемом выключенном инфракрасном освещении. Модуль обработки изображений может обрабатывать эти по меньшей мере два изображения, чтобы уменьшить или удалить артефакты. Для пояснения, модуль обработки изображений может совмещать изображения и затем вычитать изображения друг из друга, чтобы удалить артефакты. Поскольку искусственное освещение или компоненты, по существу, неизменны между двумя изображениями, то поскольку текстура радужной оболочки освещается инфракрасным освещением и показывается в одном изображении, разность изображений может удалить артефакты, в то же время сохраняя текстуру радужной оболочки. Способы и системы могут устранять влияние нелинейности датчика, идентифицируя пиксели, которые близки или находятся в нелинейной рабочей области датчика (например, насыщение или темнота), и исключая их из последующего процесса распознавания радужной оболочки, хотя процесс вычитания изображений в этих областях может быть нелинейным и артефакты могут все еще оставаться. В другом варианте осуществления способов мы можем избавляться от ухудшения изображений, используя конкретные геометрические ограничения положения пользователя, устройства и источника ухудшения. В некоторых вариантах осуществления мы можем воспользоваться преимуществами того факта, что пользователь может держать устройство перед своим лицом во время режима получения изображения радужной оболочки, уменьшая или даже блокируя, таким образом, воздействие источника ухудшения фонового освещения в одном секторе получаемого изображения радужной оболочки. Способы и системы могут, например, ограничивать распознавание радужной оболочки этим сектором, избегая, таким образом, проблем, связанных с ухудшением изображения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Перечисленные ниже чертежи показывают некоторые иллюстративные варианты осуществления описанных здесь способов и систем, в которых схожие ссылочные позиции относятся к схожим элементам. Каждый представленный вариант осуществления является иллюстрацией этих способов и систем и не предназначен для создания ограничения.
Фиг. 1A - блок-схема варианта осуществления сетевой среды с клиентской машиной, осуществляющей связь с сервером;
Фиг. 1B и 1C - блок-схемы вариантов осуществления вычислительных машин для реализации на практике описанных здесь способов и систем;
Фиг. 2 - вариант осуществления профиля интенсивности изображения, соответствующего участку изображения;
Фиг. 3A - профиль интенсивности изображения одного из вариантов осуществления несистематического шума;
Фиг. 3B - профиль интенсивности изображения одного из вариантов осуществления систематического шума;
Фиг. 4 - профиль интенсивности изображения одного из вариантов осуществления систематического шума;
Фиг. 5 - профиль интенсивности изображения одного из варианта осуществления спорадического шума;
Фиг. 6 - вариант осуществления профиля интенсивности изображения, соответствующего участку изображения, подвергнутому шумоподавлению;
Фиг. 7 - вариант осуществления изображения представления лица, содержащего текстуру радужной оболочки;
Фиг. 8 - вариант осуществления профиля интенсивности изображения, представляющего текстуру радужной оболочки;
Фиг. 9 - вариант осуществления профиля интенсивности изображения, представляющего текстуру радужной оболочки после шумоподавления;
Фиг. 10 - вариант осуществления профиля интенсивности изображения, представляющего текстуру радужной оболочки и шум;
Фиг. 11 - вариант осуществления системы получения изображения сцены и изображения радужной оболочки с использованием одного датчика;
Фиг. 12 - таблица, показывающая влияние шума на полученные изображения;
Фиг. 13 - другой вариант осуществления системы получения изображения сцены и изображения радужной оболочки с использованием одного датчика;
Фиг. 14 - вариант осуществления системы получения изображения лица и изображения радужной оболочки с использованием одного датчика;
Фиг. 15 - профиль реакции на основе двухполосного фильтра;
Фиг. 16 - вариант осуществления конфигурации с чередующимися фильтрами;
Фиг. 17 - вариант осуществления изображения с артефактами, отраженными от поверхности глаза;
Фиг. 18 - вариант осуществления изображения с текстурой радужной оболочки и артефактами, отраженными от поверхности глаза;
Фиг. 19 - еще один вариант осуществления системы для получения изображения лица и изображения радужной оболочки с использованием одного датчика;
Фиг. 20 - вариант осуществления изображения, показывающий текстуру радужной оболочки с удаленными артефактами;
Фиг. 21 - сценарий для получения изображения лица и изображения радужной оболочки;
Фиг. 22 - другой вариант осуществления изображения с текстурой радужной оболочки и артефактами, отраженными от поверхности глаза;
Фиг. 23 - еще один другой вариант осуществления системы для получения изображения лица и изображения радужной оболочки с использованием одного датчика;
Фиг. 24 - другой вариант осуществления системы для получения изображения лица и изображения радужной оболочки с использованием одного датчика;
Фиг. 25 - вариант осуществления системы для получения изображения лица и изображения радужной оболочки с использованием одного датчика и зеркала;
Фиг. 26 - вариант осуществления способа для получения изображения лица и изображения радужной оболочки с использованием одного датчика и зеркала;
Фиг. 27 - влияние доминирования одного из глаз на получение изображения лица и изображения радужной оболочки;
Фиг. 28 - другой вариант осуществления системы для получения изображения лица и изображения радужной оболочки с использованием одного датчика и зеркала;
Фиг. 29 и 30 - влияние доминирования одного из глаз на получение изображения лица и изображения радужной оболочки;
Фиг. 31 - еще один вариант осуществления системы для получения изображения лица и изображения радужной оболочки с использованием одного датчика и зеркала;
Фиг. 32 - варианты осуществления конфигурации с датчиком и зеркалом;
Фиг. 33 - другой вариант осуществления системы для получения изображения лица и изображения радужной оболочки с использованием одного датчика и зеркала;
Фиг. 34 - еще один другой вариант осуществления системы для получения изображения лица и изображения радужной оболочки с использованием одного датчика и зеркала;
Фиг. 35 - другой вариант осуществления системы для получения изображения лица и изображения радужной оболочки с использованием одного датчика;
Фиг. 36 - еще один вариант осуществления системы для получения изображения лица и изображения радужной оболочки с использованием одного датчика;
Фиг. 37 - еще один другой вариант осуществления системы для получения изображения лица и изображения радужной оболочки с использованием одного датчика; и
Фиг. 38 - блок-схема последовательности осуществления операций способа для получения изображения сцены и изображения радужной оболочки с использованием одного датчика.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Прежде, чем рассматривать другие аспекты систем и способов для получения изображения сцены и изображения радужной оболочки с использованием одного датчика, может быть полезным описание системных компонент и признаков, пригодных для использования в существующих системах и способах. На фиг. 1A представлен один из вариантов осуществления вычислительной среды 101, которая содержит одну или более клиентских машин 102A-102N (упоминаемых здесь в общем как «клиентская машина(-ы) 102»), осуществляющих связь с одним или более серверами 106A-106N (упоминаемыми здесь в общем как «сервер(ы) 106»). То, что установлено между клиентской машиной(-ами) 102 и сервером(-ами) 106, является сетью.
В одном из вариантов осуществления вычислительная среда 101 может содержать устройство, установленное между сервером(-ами) 106 и клиентской машиной(-ами) 102. Это устройство может управлять соединениями клиента/сервера и в некоторых случаях может загружать балансовые клиентские соединения среди множества серверов баз данных. Клиентская машина(-ы) 102 может в некотором варианте осуществления упоминаться как одна клиентская машина 102 или одна группа клиентских машин 102, в то время, как сервер-(ы) 106 может(могут) упоминаться как один сервер 106 или одна группа серверов 106. В одном из вариантов осуществления одна клиентская машина 102 связывается более чем с одним сервером 106, в то время как в другом варианте осуществления одна сервер 106 связывается более чем с одной клиентской машиной 102. В еще одном варианте осуществления одна клиентская машина 102 связывается с единым сервером 106.
На клиентскую машину 102 в некоторых вариантах осуществления может делаться ссылка посредством одной из следующих позиций: клиентская машина(-ы) 102; клиент(-ы); клиентский компьютер(-ы); клиентское устройство(-а); клиентское вычислительное устройство(-а); локальная машина; удаленная машина; клиентский узел(-ы); конечная точка(-и); узел(-ы) конечных точек; или вторая машина. На сервер 106 в некоторых вариантах осуществления ссылка может делаться посредством следующих позиций: сервер(-ы), локальная машина; удаленная машина; группа(-ы) серверов, главное компьютерное устройство(-а) или первая машина(-ы).
Клиентская машина 102 в некоторых вариантах осуществления может выполнять, действовать или как-либо иначе обеспечивать приложение, которая может быть одним из следующего: программное обеспечение; программа; исполняемые команды; виртуальная машина; гипервизор; веб-браузер; сетевой клиент; приложение клиент-сервер; компьютерный клиент в виде «тонкого» клиента; элемент управления ActiveX; апплет Java; программное обеспечение голосовой связи по интернет-протоколу (VoIP) связи, подобно программному IP-телефону; приложение для потокового видео и/или аудио; приложение для облегчения передачи данных в реальном времени; клиент HTTP; клиент FTP; клиент Oscar; клиент Telnet; или любой другой набор исполняемых команд инструкций. Другие варианты осуществления содержат клиентское устройство 102, которое отображает выход приложения, сформированный приложением, дистанционно исполняемым на сервере 106 или другой удаленно расположенной машине. В этих вариантах осуществления клиентское устройство 102 может отображать выход приложения в окне приложения, браузере, или другом окне вывода. В одном из вариантов осуществления приложение является рабочим столом, в то время как в других вариантах осуществления приложение является приложением, формирующим рабочий стол.
Вычислительная среда 101 может содержать более одного сервера 106A-106N, так что серверы 106A-106N логически группируются в группу 106 серверов. Группа 106 серверов может содержать серверы 106, географически разбросанные и логически сгруппированные в группу 106 серверов, или серверы 106, которые располагаются вблизи друг друга и логически сгруппированы в группу 106 серверов. Географически разбросанные серверы 106A-106N внутри группы 106 серверов в некоторых вариантах осуществления могут осуществлять связь, используя сети WAN, MAN или LAN, где различные географические области могут характеризоваться как: различные континенты; различные области континента; разные страны; разные государства; разные города; разные университетские городки; различные помещения или любая комбинация перечисленных выше географических местоположений. В некоторых вариантах осуществления группа 106 серверов может управляться как единое целое, в то время как в других вариантах осуществления группа 106 серверов может содержать множество групп 106 серверов.
В некоторых вариантах осуществления группа 106 серверов может содержать серверы 106, которые работают по существу на схожем типе платформы операционной системы (например, WINDOWS NT, произведенный Microsoft Corp., Редмонд, Вашингтон, UNIX, LINUX или SNOW LEOPARD.) В других вариантах осуществления группа 106 серверов может содержать первую группу 106 серверов, которая работает на первом типе платформы операционной системы, и вторую группу 106 серверов, которая работает на втором типе платформы операционной системы. Группа 106 серверов в других вариантах осуществления может содержать серверы 106, работающие на других типах платформ операционной системы.
Сервер 106 в некоторых вариантах осуществления может быть любым типом сервера. В других вариантах осуществления сервер 106 может быть любым из следующих типов сервера: файловый сервер; сервер приложений; веб-сервер; прокси-сервер; устройство; сетевое устройство; шлюз; шлюз приложений; шлюзовой сервер; сервер виртуализации; сервер развертывания; сервер SSL VPN; брандмауэр; веб-сервер; сервер приложений или главный сервер приложений; сервер 106, исполняющий активный каталог; или сервер 106, исполняющий программу ускорения приложений, которая обеспечивает функциональность брандмауэра, функциональность приложений или функциональность баланса нагрузки. В некоторых вариантах осуществления сервер 106 может быть сервером RADIUS, который содержит удаленную службу аутентификации набора пользователя. Некоторые варианты осуществления содержат первый сервер 106A, который принимает запросы от клиентской машины 102, направляет запрос на второй сервер 106B и отвечает на запрос, сформированный клиентской машиной 102 с ответом от второго сервера 106B. Первый сервер 106A может получить перечисление приложений, доступных клиентской машине 102, а также информацию об адресах, связанных с сервером 106 приложений, руководящим приложением, идентифицированным в пределах перечисленных приложений. Первый сервер 106A может затем предоставить ответ на запрос клиента, используя веб-интерфейс, и связаться напрямую с клиентом 102, чтобы предоставить клиенту 102 доступ к идентифицированному приложению.
Клиентские машины 102 в некоторых вариантах осуществления могут быть клиентским узлом, который запрашивает доступ к ресурсам, предоставляемым сервером 106. В других вариантах осуществления сервер 106 может предоставить клиенту 102 или клиентским узлам доступ к имеющимся ресурсам. Сервер 106 в некоторых вариантах осуществления действует как главный узел, так чтобы осуществлять связь с одним или более клиентами 102 или серверами 106. В некоторых вариантах осуществления ведущий узел может идентифицировать и предоставлять информацию об адресах, связанную с сервером 106, управляющим запрошенным приложением, одному или более клиентам 102 или серверам 106. В других вариантах осуществления ведущий узел может быть группой 106 серверов, клиентом 102, группой 102 клиентских узлов или устройством.
Один или более клиентов 102 и/или один или более серверов 106 могут передать данные по сети 104, установленной между машинами и устройствами в пределах вычислительной среды 101. Сеть 104 может содержать одну или более подсетей и может быть установлена между любой комбинацией клиентов 102, серверов 106, вычислительных машин и устройств, введенных в состав вычислительной среды 101. В некоторых вариантах осуществления сеть 104 может быть локальной сетью (LAN); городской компьютерной сетью (MAN); глобальной сетью (WAN); магистральной сетью 104, содержащей множество подсетей 104, расположенных между клиентскими машинами 102 и серверами 106; магистральной общедоступной сетью 104 с частной подсетью 104; магистральной частной сетью 104 с общедоступной подсетью 104; или магистральной частной сетью 104 с частной подсетью 104. Другие дополнительные варианты осуществления содержат сеть 104, которая может быть любым из следующих типов сети: сеть с двухточечным соединением; широковещательная сеть; телекоммуникационная сеть; сеть передачи данных; компьютерная сеть; сеть ATM (Asynchronous Transfer Mode, асинхронный режим передачи); сеть SONET (Synchronous Optical Network, синхронная оптическая сеть); сеть SDH (Synchronous Digital Hierarchy, синхронная цифровая иерархия); беспроводная сеть; проводная сеть; или сеть 104, которая содержит радиолинию, где радиолиния может быть инфракрасным каналом или спутниковой линией связи. Топология сети для сети 104 может различаться в различных вариантах осуществления, возможная топология сети содержит: топология сети с общей шиной; звездообразная топология сети; кольцевая топология сети; топология сети на основе ретрансляторов; или многоуровневая звездообразная топология сети. Дополнительные варианты осуществления могут содержать сеть 104, состоящую из сетей мобильных телефонов, которые используют протокол связи между мобильными устройствами, где протокол может быть любым из следующих: AMPS; TDMA; CDMA; GSM; GPR UMTS; 3G; 4G; или любым другим протоколом, способным осуществлять передачу данные среди мобильных устройств.
На фиг. 1B представлен вариант осуществления вычислительного устройства 100, в котором клиентская машина 102 и сервер 106, показанные на фиг. 1A, могут быть развернуты и/или выполнены на любом варианте осуществления вычислительного устройства 100, показанном и описанном здесь. Внутри вычислительного устройства 100 находится системная шина 150, связанная со следующими компонентами: центральный процессор 121; основная память 122; устройство 128 хранения данных; контроллер 123 ввода/вывода; устройства 124A-124N отображения; устройство 116 установки и сетевой интерфейс 118. В одном из вариантов осуществления устройство 128 хранения данных содержит операционную систему, стандартные программы программного обеспечения и клиентского агента 120. Контроллер 123 ввода-вывода в некоторых вариантах осуществления дополнительно соединяется с клавиатурой 126, и манипулятором 127. Другие варианты осуществления могут содержать контроллер 123 ввода-вывода, соединенный более чем с одним устройством вывода 130A-130N ввода-вывода.
На фиг. 1C представлен один из вариантов осуществления вычислительного устройства 100, в котором клиентская машина 102 и сервер 106, показанные на фиг. 1A, могут быть развернуты и/или выполнены на любом варианте осуществления показанного и описанного здесь вычислительного устройства 100. В составе вычислительного устройства 100 содержится системная шина 150, связанная со следующими компонентами: мост 170 и первое устройство 130А ввода-вывода. В другом варианте осуществления мост 170 имеет дополнительную связь с главным центральным процессором 121, причем центральный процессор 121 может дополнительно связываться со вторым устройством 130В ввода-вывода, основной памятью 122 и кэш-памятью 140. В состав центрального процессора 121 ведены порты ввода-вывода, порт 103 памяти и главный процессор.
Варианты осуществления вычислительной машины 100 могут содержать центральный процессор 121, характеризующийся любой из следующих конфигураций компонент: логические цепи, которые реагируют на команды и обрабатывают команды, вызванные из блока 122 основной памяти; микропроцессор, такой как: микропроцессоры, изготовленные компаниями Intel Corporation; Motorola Corporation; Transmeta Corporation, Санта-Клара, Калифорния; процессор RS/6000, такой как процессор, изготовленный компанией International Business Machines; компанией Advanced Micro Devices; или любой другой комбинацией логических цепей. Тем не менее, другие варианты осуществления центрального процессора 122 могут содержать любую комбинацию из следующего: микропроцессор, микроконтроллер, центральный процессор с одиночным процессорным ядром, центральный процессор с двумя процессорными ядрами, или центральный процессор более чем с одним процессорным ядром.
Хотя на фиг. 1C представлено вычислительное устройство 100, которое содержит один центральный процессор 121, в некоторых вариантах осуществления, вычислительное устройство 100 может содержать одно или более процессоров 121. В этих вариантах осуществления вычислительное устройство 100 может хранить и выполнять встроенные программы или другие исполняемые команды, которые, когда исполняются, управляют одним или более процессорами 121, чтобы одновременно исполнять команды или одновременно исполнять команды на одном фрагменте данных. В других вариантах осуществления вычислительное устройство 100 может хранить и исполнять встроенные программы или другие исполняемые команды, которые при их исполнении управляют одним или более процессорами, так чтобы каждый исполнял раздел группы команд. Например, каждому процессору 121 может быть дана команда исполнять фрагмент программы или конкретный модуль внутри программы.
В некоторых вариантах осуществления процессор 121 может содержать одно или более ядер процессора. Например, процессор 121 может иметь два ядра, четыре ядра, восемь ядер и т.д. В одном из вариантов осуществления процессор 121 может содержать одно или более ядер параллельной обработки. Ядра процессоров в процессоре 121 могут в некоторых вариантах осуществления получать доступ к доступной памяти как к глобальному адресному пространству или, в других вариантах осуществления, память внутри вычислительного устройства 100 может быть сегментирована и назначена конкретному ядру внутри процессора 121. В одном из вариантов осуществления одно или более ядер процессора или процессоров в вычислительном устройстве 100 могут раздельно получать доступ к локальной памяти. В еще одном другом варианте осуществления память внутри вычислительного устройства 100 может быть разделена между одним или более процессорами или ядрами процессора, в то время как к другой памяти можно получать доступ посредством конкретных процессоров или поднаборов процессоров. В вариантах осуществления, где вычислительное устройство 100 содержит более одного процессора, множество процессоров может содержаться в одной интегральной схеме (IC). Это множество процессоров в некоторых вариантах осуществления может быть соединено друг с другом внутренней высокоскоростной шиной, которая может упоминаться как шина межэлементных соединений.
В вариантах осуществления, где вычислительное устройство 100 содержит один или более процессоров 121 или процессор 121 содержит одно или более процессорных ядер, процессоры могут исполнять одну команду одновременно на множестве фрагментов данных (SIMD) или, в других вариантах осуществления, могут исполнять множество команд одновременно на множестве фрагментов данных (MIMD). В некоторых вариантах осуществления вычислительное устройство 100 может содержать любое количество процессоров SIMD И MIMD.
Вычислительное устройство 100 в некоторых вариантах осуществления может содержать видеопроцессор, графический процессор или модуль обработки графических данных. Модуль обработки графических данных может содержать любую комбинацию программного и аппаратурного обеспечения и может дополнительно вводить графические данные и графические команды, и выводить готовую графику. В некоторых вариантах осуществления модуль обработки графических данных может быть введен в состав процессора 121. В других вариантах осуществления вычислительное устройство 100 может содержать один или более процессоров 121, где по меньшей мере один процессор 121 выделяется для обработки и предоставления графики.
Один из вариантов осуществления вычислительной машины 100 содержит центральный процессор 121, который связан с кэш-памятью 140 через вторичную шину, также известную как обходная шина, в то время как другой вариант осуществления вычислительной машины 100 содержит центральный процессор 121, связанный с кэш-памятью через системную шину 150. Локальная системная шина 150 может в некоторых вариантах осуществления также использоваться центральным процессором для связи более чем с одним типом устройства 130A-130N ввода-вывода. В некоторых вариантах осуществления локальная системная шина 150 может быть любым из следующих типов шины: шина VL-bus VESA; шина ISA; шина EISA; шина MicroChannel Architecture (MCA); шина PCI; шина PCI-X; шина PCI Express; или NuBus. Другие варианты осуществления вычислительной машины 100 содержат устройство 130A-130N ввода-вывода, которое является видеодисплеем 124, связанным с центральным процессором 121. Кроме того, другие версии вычислительной машины 100 содержат процессор 121, соединенный с устройством 130A-130N ввода-вывода через любое из следующих соединений: HyperTransport, Rapid I/O или InfiniBand. Дополнительные варианты осуществления вычислительной машины 100 содержат процессор 121, связанный с одним устройством 130A ввода-вывода, использующим шину локального взаимодействия, и вторым устройством 130B ввода-вывода, использующим прямое соединение.
Вычислительное устройство 100 в некоторых вариантах осуществления содержит блок 122 основной памяти и кэш-память 140. Кэш-память 140 может быть любым типом памяти и в некоторых вариантах осуществления может быть любым из следующих типов памяти: SRAM; BSRAM; или EDRAM. Другие варианты осуществления содержат кэш-память 140 и блок 122 основной памяти, которые могут быть любым из следующих типов памяти: статическая оперативная память (SRAM), Burst SRAM или SynchBurst SRAM (BSRAM); динамическая оперативная память (DRAM); Fast Page Mode DRAM (DRAM FPM); Enhanced DRAM (EDRAM), Extended Data Output RAM (EDO RAM); Extended Data Output DRAM (EDO DRAM); Burst Extended Data Output DRAM (BEDO DRAM); Enhanced DRAM (EDRAM); синхронная DRAM (SDRAM); JEDEC SRAM; PC 100 SDRAM; Double Data Rate SDRAM (DDR SDRAM); Enhanced SDRAM (ESDRAM); SyncLink DRAM (SLDRAM); Direct Rambus DRAM (DRDRAM); Ferroelectric RAM (FRAM); или любым другим типом памяти. Дополнительные варианты осуществления содержат центральный процессор 121, который может получать доступ к основной памяти 122 через системную шину 150, порт 103 памяти или любое другое соединение, шину или порт, которые позволяют процессору 121 получить доступ к памяти 122.
Один из вариантов осуществления вычислительного устройства 100 оказывает поддержку любого из следующих устройств 116 установки: дисковод для компакт-дисков, привод CD-R/RW, привод DVD-ROM, лентопротяжные устройства различных форматов, USB-устройства, загрузочный носитель данных, загрузочный CD, загрузочный CD для распространения GNU/Linux, такой как KNOPPIX®, жесткий диск или любое другое устройство, соответственно пригодное для установки приложений или программного обеспечения. Приложения могут в некоторых вариантах осуществления содержать клиентского агента 120 или любой участок клиентского агентства 120. Вычислительное устройство 100 может дополнительный содержать устройство 128 хранения данных, которое может быть одним или более жесткими дисками или одним или более избыточными массивами независимых дисков; причем устройство хранения данных выполнено с возможностью хранения операционной системы, программного обеспечения, прикладных программ или по меньшей мере участка клиентского агента 120. Дополнительный вариант осуществления вычислительного устройства 100 содержит устройство 116 установки, которое используется в качестве устройства 128 хранения данных.
Вычислительное устройство 100 может дополнительно содержать сетевой интерфейс 118 для связи с локальной сетью (LAN), глобальной сетью (WAN) или Интернетом через множество соединений, в частности через стандартные телефонные линии, линии связи LAN или WAN (например, 802.1 1, T1, T3, 56kb, X.25, SNA, DECNET), широкополосные соединения (например, ISDN, Frame Relay, ATM, Gigabit Ethernet, Ethernet-over-SONET), беспроводные соединения или некоторую комбинацию любых из перечисленных выше. Соединения могут также быть установлены, используя множество протоколов связи (например, TCP/IP, IPX, SPX, Net BIOS, Ethernet, ARCNET, SONET, SDH, Fiber Distributed Data Interface (FDDI), RS232, RS485, IEEE 802.11, IEEE 802.1la, IEEE 802.1lb, IEEE 802.1lg, CDMA, GSM, WiMax и прямые асинхронные соединения). Одна из версий вычислительного устройства 100 содержит сетевой интерфейс 118, способный осуществлять связь с дополнительными вычислительными устройствами 100' через любой тип и/или форму шлюзового или туннельного протокола, такого как Secure Socket Layer (SSL) или Transport Layer Security (TLS), или Citrix Gateway Protocol компании Citrix Systems, Inc. Версии сетевого интерфейса 118 могут содержать любое из следующего: встроенный сетевой адаптер; сетевая карта; сетевая плата PCMCIA; сетевой адаптер с общей шиной карты; беспроводной сетевой адаптер; сетевой адаптер USB; модем или любое другое устройство, пригодное для взаимодействия вычислительного устройства 100 с сетью, способное к осуществлению связи и выполнению описанных здесь способов и систем.
Варианты осуществления вычислительного устройства 100 содержат одно из следующих устройств 130A-130N ввода-вывода: клавиатура 126; манипулятор 127; мышь; сенсорные панели; оптическое перо; шаровые манипуляторы; микрофоны; цифровые панели; видеодисплеи; громкоговорители; лазерные принтеры струйные принтеры или любое другое устройство ввода-вывода, способное выполнять описанные здесь способы и системы. Контроллер 123 ввода-вывода может в некоторых вариантах осуществления соединяться с множеством устройств 103A-130N ввода-вывода, чтобы управлять одним или более устройствами ввода-вывода. Некоторые варианты осуществления устройств 130A-130N ввода-вывода могут быть выполнены с возможностью обеспечения хранения или носителя 116 данных установки, тогда как другие могут снабдить обеспечивать интерфейс универсальной последовательной шины (USB) для подключения USB-устройств хранения данных, такой как USB-линия карт Flash Drive, производимых компанией Twintech Industry, Inc. Другие варианты осуществления содержат устройство 130 ввода-вывода, которое может быть мостом между системной шиной 150 и внешней шиной, такое как: шина USB; Apple Desktop Bus; последовательное соединение RS-232; шина SCSI; шина Fire Wire; шина Fire Wire 800; шина Ethernet; шина AppleTalk; шина Gigabit Ethernet; шина Asynchronous Transfer Mode; шина HIPPI; шина Super HIPPI; шина SerialPlus; шина SCI/LAMP; шина FibreChannel; или малая интерфейсная шина компьютерных систем Serial Attached.
В некоторых вариантах осуществления вычислительная машина 100 может работать с любой операционной системой, тогда как в других вариантах осуществления вычислительная машина 100 может работать с любой из следующих операционных систем: версии операционных систем MICROSOFT WINDOWS; различные редакции операционных систем Unix и Linux; любая версия MAC OS от компании Apple Computer; ОС/2 от компании International Business Machines; Android от компании Google; любая встроенная операционная система; любая операционная система в реальном времени; любая операционная система с открытым исходным кодом; любая собственная операционная система; любые операционные системы для устройств мобильных вычислений; или любая другая операционная система. В еще одном другом варианте осуществления вычислительная машина 100 может работать с несколькими операционными системами. Например, вычислительная машина 100 может работать с PARALLELS или другой платформой виртуализации, которая может работать или управлять виртуальной машиной, работающей с первой операционной системой, в то время как вычислительная машина 100 работает со второй операционной системой, отличной от первой операционной системы.
Вычислительная машина 100 может быть реализована в любом из следующих вычислительных устройств: вычислительная рабочая станция; настольный компьютер; ноутбук или портативный компьютер; сервер; карманный компьютер; мобильный телефон; устройство мобильной связи; устройство воспроизведения носителей данных; игровая система; мобильное вычислительное устройство; нетбук, планшет; устройство iPod или семейств устройств iPad от компании Apple Computer; любое устройство из семейства устройств PLAYSTATION от компании Sony Corporation; любое устройство из семейства устройств Nintendo от компании Nintendo Co; любое устройств семейства устройств XBOX от компании Microsoft Corporation; или любой другой тип и/или форма вычислительных, телекоммуникационных или запоминающих устройств, которые способно осуществлять связь и которые имеют достаточную мощность процессора и объем памяти, чтобы выполнять описанные здесь способы и системы. В других вариантах осуществления вычислительная машина 100 может быть мобильным устройством, таким как любое из следующих мобильных устройств: мобильный телефон с поддержкой JAVA или персональный цифровой секретарь (PDA); любое вычислительное устройство, имеющее различные процессоры, операционные системы и устройства ввода, совместимые с устройством; или любое другое мобильное вычислительное устройство, способное к выполнению описанных здесь способов и систем. В других вариантах осуществления вычислительное устройство 100 может быть любым из следующих мобильных вычислительных устройств: любое устройство серии Blackberry, или другое карманное устройство от компании Research In Motion Limited; iPhone от компании Apple Computer; Palm Pre; карманный персональный компьютер; карманный PC Phone; телефон Android; или любое другое карманное мобильное устройство. Описав определенные системные компоненты и признаки, которые могут быть пригодны для использования в настоящих системах и способах, ниже рассматриваются дополнительные варианты.
На фиг. 2 представлено иллюстративное изображение примерной сцены или объекта (например, дом), полученное обычным датчиком изображения. Датчик изображения может содержать, например, цифровое устройство на приборах с зарядовой связью (CCD) или активный пиксельный датчик на комплементарной структуре «металл-оксид-полупроводник» (CMOS), хотя этим он не ограничивается. График или профиль интенсивности, соответствующий изображению, показывает для области поперечного сечения, указанной линией P2, значение интенсивности I для пикселей по вертикальной оси и соответствующее пространственное положение X. Яркие и темные точки в профиле интенсивности соответствуют ярким и темным точкам на показанном изображении. Как правило, в сигнале может присутствовать существенный шум, представленный флюктуациями интенсивности даже в пределах равномерно освещенных областей (например, области, соответствующие двери дома). Шум может создаваться несколькими источниками, например, шум усилителя и флуктуационный шум, анизотропный (систематический) шум и спорадический шум. Флуктуационный шум относится к квантовому эффекту наличия конечного числа фотонов, собираемых в конкретной пиксельной яме за конечный промежуток времени. Чем меньше размер пикселя, тем больший флуктуационный шум может иметься в результате. Это происходит потому, что может быть меньше фотонов, из которых можно получить результат измерения падающего освещения. По мере того, как размеры пикселей становятся меньше, фокусное расстояние для соответствующей оптики для заданной разрешающей способности может также линейно падать. Это может уменьшать толщину комбинации компонента линзы/датчика. Однако, поскольку требования к разрешающей способности датчика растут и поскольку пространственные ограничения для датчиков и связанной с ними оптики становятся более жесткими, размеры датчика и пикселей, должны соответственно уменьшаться, чтобы согласовать требования и ограничения. Результатом уменьшения размеров пикселей является существенное увеличение шума датчика. Этот тип шума, а также шум усилителя, может быть характеризован как зависящий от времени и несистематический, как показано на фиг. 3A.
Другим типом шума является анизотропный или систематический/периодический шум. Периодический шум может быть вызван, например, различиями в коэффициентах усиления усилителя на пути считывания датчика изображения. Например, различные строки и столбцы могут проходить через различные усилители с немного различающимися коэффициентами усиления. Этот тип систематического шума показан на фиг. 3B, где профиль интенсивности, который должен быть равномерно плоским, на деле периодически флюктуирует в одном измерении (например, по изображению). На фиг. 4 показан пример спорадического шума, введенного в изображение, который может быть очевиден для множества повторяющихся изображений. Например, случайные пиксели в матрице узлов датчика могут ухудшать чувствительность, являются нефункциональными или имеют ограниченное или чрезмерное усилие, приводящее в результате к пикселям, которые более яркие или более темные, как показано на чертеже.
Проблемы, возникающие в результате шума, обычно проявляются, при выполнении шумоподавления в модуле 220 обработки изображений. Модуль 220 обработки изображений может использовать любой тип пространственной медианной фильтрации или усреднения в выбранной области, как показано на фиг. 5. Есть много способов выполнения шумоподавления и мы указывает медианную фильтрацию и усреднение в выбранной области только для иллюстрации. На фиг. 6 показан профиль интенсивности, который может быть результатом шумоподавления. Хотя шумоподавление может существенно удалять шум, модуль 220 обработки изображений, поддерживающий признаки (например, яркие и темные точки), соответствующие фактическим объектам и краям в сцене. С точки зрения пользователя качество изображения является обычно недопустимым на фиг. 1 (например, зашумленным), тогда как изображения на фиг. 6 рассматривается как имеющее лучшее качество.
На фиг. 7 показано изображение радужной оболочки II и лица Fl. Изображение может быть получено, используя оптимальную систему получения изображения радужной оболочки, например, в соответствии с техническими требованиями, описанными в стандартах Национального института стандартов и технологий (NIST). Эти технические требования могут содержать то, что описано в документе ANSI/INCITS 379-2004, Iris Image Interchange Format. Как показано на фиг. 7, текстура радужной оболочки представляется линиями внутри круговой области, указанной как II. На фиг. 8 показано одно изображение профиля интенсивности текстуры радужной оболочки. В некоторых вариантах осуществления подобие между фиг. 8 (профиль интенсивности структуры текстуры радужной оболочки) и фиг. 2 (профиль интенсивности шумового сигнала) может быть совершенно очевидным. Причина такого подобия состоит в том, что источник каждого сигнала/структуры характеризуется вероятностным процессом. В случае радужной оболочки, сигнал создается разрыванием ткани радужной оболочки до рождения, наиболее похожим на процесс, при котором разрыв бумаги различается каждый раз, когда он происходит. В случае шума датчика, флуктуационный шум и другие шумы создаются случайными физическими процессами, зависящими от времени.
Частотные характеристики сигнала «текстуры» радужной оболочки были охарактеризованы в некоторой степени в стандартах NIST [ANSI/INCITS 379-2004, Iris Image Interchange Format], например, минимальными значениями разрешающей способности, соответствующими линиям/парам на миллиметр (мм), и могут назначаться для различных диапазонов диаметров радужной оболочки. Диаметр радужной оболочки может зависеть от конкретной оптической конфигурации. Для иллюстрации, при диаметре радужной оболочки между 100-149 пикселями, определенная пиксельная разрешающая способность может быть минимально 8,3 пикселей на мм, с оптической разрешающей способностью при 60-тпроцентной модуляции минимум 2,0 линий-пар на мм. Для диаметра радужной оболочки между 150-199 пикселями определенная пиксельная разрешающая способность может быть минимум 12,5 пикселей на мм с оптической разрешающей способностью при 60-типроцентной модуляции минимум 3,0 пар-линий на мм. Для диаметра радужной оболочки 200 или более пикселей определенная пиксельная разрешающая способность может быть минимум 16,7 пикселей на мм, с оптической разрешающей способностью при 60-типроцентной модуляции минимум 4,0 линий-пар на мм. В определенных вариантах осуществления может быть пригоден другой диаметр с комбинацией определенной пиксельной разрешающей способности и/или оптической разрешающей способностью.
На фиг. 9 показан профиль интенсивности текстуры радужной оболочки после воздействия описанного выше процесса шумоподавления. В этом иллюстративном случае текстура радужной оболочки, по существу, удалена шумоподавлением. По этой причине алгоритмы шумоподавления, такие как усреднение для конкретной области, могут быть неспособны определять различие между текстурой радужной оболочки и шумом. Кроме того, шумоподавление, являющееся стандартным или типичным в большинстве устройств получения изображения, может быть ограничением, когда применяется к выполнению распознавания радужной оболочки.
Настоящие системы и способы могут рассматривать эту проблему, распознавая конкретные характеристики, связанные с распознаванием радужной оболочки. На фиг. 10 в одном из вариантов осуществления показан профиль интенсивности для текстуры радужной оболочки, полученной оптимально (например, как в стандартах NIST [ANSI/INCITS 379-2004, Iris Image Interchange Format), вместе с профилем интенсивности шума датчика, обозначенным пунктирной линией. Определенные процессы распознавания радужной оболочки содержат идентификацию недостаточности статистической независимости между зарегистрированным сигналом и сигналом датчика. Значимым может быть то, что совпадение обычно объявляется посредством сравнения, дающего результат, которого маловероятно можно будет достигнуть вероятностным процессом. Также, добавление значительного случайного и зависящего от времени шума к первоначальному сигналу радужной оболочки может поэтому: 1) незначительно увеличить показатель ложного совпадения, поскольку ложные совпадения являются результатом неслучайного совпадения, 2) может иметь ограниченное влияние на показатель ложного отклонения для человека, если текстура сигнала радужной оболочки в целом или по существу превышает текстуру шума датчика (например, даже если сами изображения кажутся наблюдателю зашумленными, и 3) может увеличить показатель ложного отклонения для пользователя (с ограниченными другими последствиями), если текстура сигнала радужной оболочки имеет подобную или меньшую величину по сравнению с величиной шума датчика.
Добавление систематического шума, однако, к исходному сигналу радужной оболочки, как показано, например, на фиг. 3, может вызвать ложное совпадение, потому что сравнение между двумя наборами данных может дать результат, который не сможет быть достигнут вероятностным процессом. Также, определенные варианты осуществления способов и систем могут предпочесть (например, парадоксально) присутствие шума (например, даже значительных уровней шума) в полученном изображении радужной оболочки, чтобы улучшить характеристики идентификации радужной оболочки по сравнению с изображениями, имеющими пониженные уровни шума (например, за счет шумоподавления). В некоторых вариантах осуществления настоящие системы могут уменьшать или устранять уровень подавления несистематического шума, примененного к изображению, когда изображение предназначается для распознавания радужной оболочки. Результирующие изображения потенциально могут казаться наблюдателю чрезвычайно зашумленными по сравнению с обработанным изображением (например, к которому применено шумоподавление). Однако, характеристики при распознавании радужной оболочки могут быть значительно улучшены, если вместо этого для распознавания радужной оболочки используется зашумленное изображение. В некоторых конкретных реализациях аппаратурного обеспечения алгоритмы шумоподавления включены и жестко закодированы и не могут быть выключены. Некоторые варианты осуществления настоящих методов и систем позволяют управлять алгоритмами шумоподавления, чтобы избежать подавления шума в полосах частот, ожидаемых для текстуры радужной оболочки, как приведено в другом месте в описании.
На фиг. 11 в качестве примера показана реализация подхода, посредством которого основной процессор может управлять видеопроцессором, например, видеопроцессором сигналов низкого уровня. В режиме, в котором выполняется распознавание радужной оболочки, сигнал может передаваться на сигнальный видеопроцессор, чтобы изменять процесс шумоподавления, как описано ранее. В зависимости от величины систематического шума, такой шум затем может удаляться (например, используя динамическую калибровку строк, посредством которой пиксели на краю датчика охватываются и могут использоваться для калибровки датчика), или может быть оставлен нетронутым, если величина шума существенно меньше, чем величина сигнала для текстуры радужной оболочки. Для иллюстрации, на фиг. 12 показана таблица, обобщающая множество сценариев, которая описывает, как различные типы шума могут оказать влияние на характеристики распознавания радужной оболочки и/или качество видимого изображения в различных режимах получения изображений.
Другая проблема, касающаяся получения оптимального стандартного изображения сцены и изображения радужной оболочки на одном и том же датчике, относится к длине волны освещения, требующегося для стандартного изображения и для изображения радужной оболочки. Изображение радужной оболочки обычно требует инфракрасного освещения, тогда как стандартное изображение обычно требует видимого освещения. Здесь существуют конфликтующие ограничения. Некоторые варианты осуществления настоящих систем могут быть выполнены с возможностью их разрешения посредством чередующихся фильтров, имеющие различные характеристики для инфракрасного и видимого света. Эти системы могут использовать одну из множества различных конфигураций таких фильтров перед датчиком изображения, когда происходит получение изображения. Одним из примеров фильтра, который может быть введен или модифицирован, чтобы создать чередующийся фильтр, является фильтр, имеющий структуру RGB Байера (красный, зеленый, синий) (см., например, патент США 3 971 065). Фильтры, которые пропускают (прежде всего, значительно или только) инфракрасную область, могут чередоваться с другими фильтрами, которые пропускают (прежде всего, значительно или только) окрашенный или видимый свет. Некоторые варианты осуществления фильтров, которые обеспечивают выбранную фильтрацию, описываются в публикации заявки на патент США 20070145273 и публикации заявки на патент США 20070024931. Некоторые варианты осуществления настоящей системы и способов используют вместо этого матрицу чередующихся R,G,(G+I),B. Некоторые из этих систем обладают способностью сохранять полную (или, по существу, полную) разрешающую способность по сигналу G (зеленый), к которому зрительная система человека обычно наиболее чувствительна.
В режиме распознавания радужной оболочки величина реакции на освещение G (зеленым светом) обычно намного меньше, чем величина реакции на инфракрасное излучение за счет падающего инфракрасного освещения. В некоторых вариантах осуществления приблизительное значение реакции (I) инфракрасного сигнала в режиме распознавания радужной оболочки может быть получено, вычитая сигнал (G) из соседнего сигнала (G+I). В стандартном режиме получения изображений сигнал R, G, (G+I), B может быть обработан, чтобы получить примерное значение G' для G в пикселе, в котором получено G+I. Могут использоваться различные способы формирования таких примерных значений, например, когда используется пиксельная матрица R, G, T, B, где T является полной прозрачностью. Пиксель T в такой реализации может содержать сигналы R, G, B и сигналы I, сложенные или наложенные друг на друга. Это может быть проблематичным. Если пиксельный фильтр T полностью прозрачен, то для получения эффективных характеристик сумма реакций R, G, B, I должны все еще лежать в пределах динамического диапазона пикселя. Для заданного времени интегрирования и области пикселя по всему датчику изображения, это означает, что динамический диапазон R, G, B пиксели не может быть полностью использован, поскольку может произойти насыщение пикселя T (R+G+B+I). Устанавливая разные пиксельные области или усиление для пикселя T по сравнению с другими пикселями R, G, B, такая реализация может быть возможной, но может оказаться дорогой. Одним из улучшений, которое может быть введено в настоящие системы, является использование фильтра нейтральной плотности вместо прозрачного фильтра. Фильтр нейтральной плотности может уменьшить величину освещения на всех длинах волн (R, G, B и I) в этом пикселе и может позволить использование всего спектра или широкого диапазона возможностей пикселей в пикселях R, G, B, уменьшая, таким образом, шум. В качестве примера может быть выбран фильтр нейтральной плотности со значением 0,5-0,6. Зеленый сигнал обычно может вносить приблизительно 60% сигнала яркости, состоящего из сигналов R, G и B, объединенных вместе.
Если фильтр T будет полностью прозрачен, то общий динамический диапазон датчика обычно потребуется уменьшить, чтобы он соответствовал диапазону пикселя T, и поддерживать его в линейном диапазоне за счет отношения сигнал/шум для пикселей R, G, B. Вводя матрицу фильтра R, G, G+I, B в некоторые варианты осуществления наших систем и поскольку сигналы красного и синего не присутствуют в пикселе G+I, общий динамический диапазон датчика может быть увеличен по сравнению с динамическим диапазоном матрицы R, G, T, B, увеличивая, таким образом, отношение сигнал/шум.
Другой подход, содержащийся в некоторых вариантах осуществления наших способов и систем получения оптимального стандартного изображения сцены и изображения радужной оболочки на одном и том же датчике, и относящийся к длине волны освещения, содержит мультиплексирование или установку фильтра подавления инфракрасного излучения на датчике для получения стандартного изображения или линзе. В одном из вариантов осуществления участок датчика (например, 20% датчика или узлов датчика) может быть выделен, прежде всего, для распознавания радужной оболочки, в то время как остающийся участок (например, 80%) может использоваться для стандартного получения изображений, например, как показано на фиг. 14. Нижний участок (например, 80%>) датчика, как в этом примере, может быть покрыт стандартным фильтром подавления инфракрасного излучения. Остальные 20% датчика могут оставаться открытыми. В режиме распознавания радужной оболочки покрытая область может игнорироваться. Например, приложение для распознавания радужной оболочки, исполняемое на устройстве получения изображения, может направлять пользователя так, чтобы направлять его глаза в области считывания в непокрытой 20%-ой области. Механизмы обратной связи могут направлять пользователя так, чтобы перемещать устройство получения изображения для определения местонахождения радужных оболочек пользователя в соответствующей области получения изображения. Например, так как лицо будет видно в остающихся 80% датчика изображения, оно может использоваться для обратной связи при направлении пользователя, как вариант, с помощью значков, появляющимися на месте области глаз. В некоторых вариантах осуществления датчик изображения может скорректировать свою ориентацию, чтобы получить изображение радужной оболочки пользователя, используя непокрытую область.
Другой подход, содержащийся в некоторых вариантах осуществления настоящих систем и способов, использует двухполосный фильтр на всем или на существенном участке части датчика цветных изображений или датчика. Такой фильтр может пропускать сигналы R, G, B и инфракрасные сигналы в пределах выбранных полос, таких как полосы приблизительно 850 нм или 940 нм, и может давать частотную характеристику, показанную на фиг. 15. В еще одном варианте осуществления система получения изображений может использовать фильтр с подавлением инфракрасного излучения, который может быть автоматически или вручную устанавливаться или вводиться в место, занимающее по меньшей мере участок датчика изображения, когда устройство находится в стандартном режиме получения изображения. Например, фильтр с подавлением инфракрасного изображения может покрывать участок датчика изображения, чтобы быть выровненным с глазом пользователя для получения изображения радужной оболочки. Другие участки датчика изображения могут получать, например, части лица пользователя. Фильтр с подавлением инфракрасного излучения может располагаться на одном конце датчика, позволяя, таким образом, датчику и соответственно полученному изображению иметь две различных области (с подавлением инфракрасного излучения и без подавления инфракрасного излучения), а не 3 или более областей (например, без подавления инфракрасного излучения, с подавлением инфракрасного излучения и без подавления инфракрасного излучения). Это позволяет получать больший по площади и более сопряженный участок сцены без радужной оболочки (например, лицо), что может, в свою очередь, использоваться, например, для идентификации лица. В некоторых вариантах осуществления фильтр видимого света или фильтр, пропускающий инфракрасное излучение, могут помещаться на датчике изображения (например, как вариант), когда устройство находится в режиме получения изображения радужной оболочки.
В некоторых вариантах осуществления система получения изображений может чередовать фильтры с подавлением прохождения инфракрасного излучения и фильтры, пропускающие инфракрасное излучение через датчик, например, как показано на фиг. 16. Чередующийся фильтр может быть конфигурирован различными другими способами, такими как использование устройства решетчатой коробки, полос различной ширины, или других чередующихся и/или повторяющихся структур. В режиме распознавания радужной оболочки реакция от пикселей/узлов датчика, расположенных ниже полос фильтра, пропускающего инфракрасное излучение, используется для распознавания радужной оболочки, в то время как реакция от пикселей/узлов датчика, расположенных ниже полос фильтра, подавляющего инфракрасное излучение, используется в режиме получения стандартных изображений. В некоторых вариантах осуществления как стандартные изображения, так и изображения радужной оболочки могут быть получены при одном получении изображения, например, разделяя инфракрасные и неинфракрасные компоненты изображения, соответствующие структуре чередования.
В некоторых вариантах осуществления изображение, полученное датчиком изображения, может быть затронуто или повреждено фоновым освещением. Например, в некоторых вариантах осуществления, когда инфракрасная фильтрация и/или освещение не оптимальны, изображения сцены во время получения изображения радужной оболочки могут отражаться от поверхности глаза (например, роговицы). Пример такого случая показан на фиг. 17. Отражение изображения (например, на роговице глаза) может быть отражением сцены, например, содержащей дома, окружающие пользователя. Такие отражения могут упоминаться как артефакты. Выше мы описали, как систематический шум может сильно влиять на характеристики распознавания радужной оболочки. Артефакты могут быть преодолены, используя подобные способы: получение по меньшей мере двух изображений, одно с включенным инфракрасным освещением, которым управляют, как показано на фиг. 18, и по меньшей мере второе изображение с выключенным инфракрасным освещением, которым управляют, как показано на фиг. 17. Модуль обработки изображений может обрабатывать эти по меньшей мере 2 изображения, чтобы уменьшить или удалить артефакты. Например, в некоторых вариантах осуществления модуль обработки изображений может выровнять изображения и затем вычесть изображения друг из друга, как показано на схеме обработки на фиг. 19. Так как освещение для удаления артефактов, по существу, не меняется между двумя изображениями, тогда как текстура радужной оболочки освещается инфракрасным освещением, артефакт может быть удален, получая разность, в которой такая текстура радужной оболочки остается. Оставшаяся текстура радужной оболочки показана линиями внутри радужной оболочки на фиг. 20. Система может дополнительно избавляться от нелинейности датчика, например, идентифицируя пиксели, находящиеся вблизи или в нелинейном рабочем диапазоне датчика (например, насыщение или темнота). Модуль обработки изображений может удалить идентифицированные пиксели из последующего процесса распознавания радужной оболочки. Так как процесс вычитания изображения в этих областях может быть нелинейным, при использовании подхода с вычитанием артефакты могут все еще оставаться.
Другой вариант осуществления настоящих способов имеет дело с повреждением изображений, используя конкретные геометрические ограничения положения пользователя, устройства, получающего изображение, и источника повреждений или артефактов. Модуль обработки изображений может быть выполнен с возможностью распознавания того, как пользователь держит устройство получения изображения перед своим лицом во время режима получения радужной оболочки, устройство получения изображения может уменьшить влияние или даже блокировать источники повреждения фоновым освещением в пределах одного сектора полученного изображения радужной оболочки, например, как показано на фиг. 21. Модуль обработки изображений может ограничить распознавание радужной оболочки в первую очередь или исключительно этим сектором, избегая, таким образом, проблем, связанных с повреждением изображения, как показано на фиг. 22. В некоторых вариантах при решении вопроса биометрического совпадения осуществление распознавание радужной оболочки, основанное на этом секторе изображения, может иметь больший вес, чем для других секторов.
В некоторых вариантах осуществления инфракрасное освещение не всегда доступно или не гарантируется во время получения изображения. Система 200 получения изображений может быть выполнена с возможностью управления и/или предоставления инфракрасного освещения. Система получения изображений может снижать потребление мощности, используя освещение инфракрасным источником (например, светодиодами, LED), когда устройство находится в режиме распознавания радужной оболочки, как показано на фиг. 23.
На фиг. 24 показан один из вариантов осуществления системы 200 получения изображений, использующий некоторые признаки раскрытых здесь систем и способов. Система 200 получения изображений может быть осуществлена в устройстве, таком как мобильное и/или компактное устройство. Устройство может иметь экран с датчиком. Освещение могут обеспечивать инфракрасные светодиоды. Пользователь может использовать сенсорный экран или другое устройство ввода (например, клавиатура, кнопка или распознавание голосовых команд), чтобы переключаться между режимом распознавания радужной оболочки и стандартным режимом получения изображения. Устройство может содержать приложение, посредством которого пользователь может активировать режим получения изображения. Приложение может дополнительно обеспечивать обратную связь или механизм управления, чтобы автоматически определять местонахождение радужной оболочки пользователя, или направлять пользователя, чтобы перемещать радужную оболочку пользователя внутри соответствующей области получения изображения. В некоторых вариантах осуществления дополнительный фильтр подавления инфракрасного излучения может быть активирован или установлен поверх датчика изображения, вручную или автоматически, при режиме получения изображения радужной оболочки. Другие фильтры (например, фильтр, пропускающий инфракрасное излучение) могут вводиться и/или активироваться в соответствующем режиме(-ах). В некоторых вариантах осуществления некоторые признаки системы 200 получения изображений могут содержаться в дополнительных принадлежностях или переходе для мобильного или стационарного устройства. Как пример, такие признаки могут содержать инфракрасный светильник, один или более фильтров, и/или интерфейс (например, беспроводной или физический) для мобильного или стационарного устройства.
В некоторых вариантах осуществления система 200 получения изображений может содержать инфракрасные светильники, встроенные в экран системы 200 получения изображений, чтобы освещать глаз пользователя инфракрасным светом. Экраны и дисплеи обычно используют белое светодиодное освещение под жидкокристаллической матрицей. Добавляя или заменяя некоторый участок со светодиодами видимого света на светильники ближнего инфракрасного излучения, источник инфракрасного освещения может обеспечиваться собственным дисплеем. В таком варианте осуществления система 200 получения изображений, возможно, не требует дополнительного приспособления или области на системе 200 получения изображений для обеспечения инфракрасного освещения, оставляя, таким образом, свободное место.
В некоторых вариантах осуществления система 200 получения изображений может содержать светильник видимого света, например, с двумя источниками света разной мощности. Светильник видимого света может быть включен на малую мощность во время режима получения изображений радужной оболочки. Освещение с малой мощностью может быть выбрано, чтобы не отвлекать пользователя или не создавать для него дискомфорт. В некоторых вариантах осуществления уровень яркости при малой мощности может быть по меньшей мере в 2 раза темнее максимальной яркости светильника видимого света. Такой уровень яркости может, например, использоваться, чтобы осветить расширенную сцену. Светильник видимого света с малой мощностью может использоваться для сжатия радужной оболочки и увеличения площади радужной оболочки, независимо от того, находится ли пользователь в темноте или нет. Однако, поскольку светильник видимого света может находиться близко к глазу, некоторые из фильтров, описанных выше, могут все еще пропускать значительный видимый свет на датчик. Поэтому, в некоторых вариантах осуществления видимый свет выключается перед тем, как получать изображения радужной оболочки, а взамен него включается светильник ближнего инфракрасного излучения. В альтернативном варианте осуществления сам экран может использоваться в качестве источника видимого освещения.
В некоторых вариантах осуществления одно из преимуществ использования одного датчика в системе 200 получения изображений состоит в том, что пространство, занятое системой, может быть минимизировано по сравнению с использованием двойного датчика. Однако, в любом случае важным соображением является способность пользователя и/или оператора эффективно использовать устройство с одним датчиком или с двойным датчиком.
В некоторых вариантах осуществления зеркальная поверхность может использоваться, чтобы помочь направлять пользователя при выравнивании радужной оболочки пользователя с соответствующей зоной получения датчика изображения. Зеркальная поверхность может обеспечивать обратную связь пользователю по положению пользователя, как показано на фиг. 25, где пользователь держит устройство перед собой и виртуальное изображение участка лица пользователя рассматривается на удвоенном расстоянии от пользователя до устройства. Однако, из-за такого свойства системы зрения человека, как глазное доминирование, и требований нашей системы распознавания радужной оболочки, оптимальный размер зеркала может не изменяться в размерах линейно в зависимости от расстояния между пользователем и зеркалом, как можно было бы ожидать. Фактически, при некоторых условиях увеличение размера зеркала при попытке улучшения характеристики распознавания радужной оболочки может ухудшить характеристики или вызвать трудность при выравнивании.
Глазное доминирование является тенденцией предпочитать визуальный вход от одного или другого глаза. Оно встречается у большинства людей, причем 2/3 людей имеют доминирование правого глаза и 1/3 людей имеют доминирование левого глаза. Настоящие системы и способы учитывают глазное доминирование и объединяют свойства глазного доминирования с ограничениями при распознавании радужной оболочки, чтобы максимизировать размер получаемого изображения радужной оболочки, в то же время минимизируя размер зеркала, используемого для направления пользователя.
На фиг. 26 показано отражающее поле зрения зеркала с таким размером, чтобы оба глаза с удобством занимали поле зрения. В некоторых вариантах осуществления ширина зеркала такова, что на расстоянии видимости устройства 200 получения изображений отражающее поле зрения может быть по меньшей мере приблизительно на 50% шире, чем отражение разделения глаз. Для целей иллюстрации, пользователь показан в середине зеркала. На фиг. 27, однако, показано, что на практике, за счет доминирования глаз, пользователь обычно располагается в одной стороне зеркала, так что его доминирующий глаз находится ближе к центру зеркала. Если ширина поля зрения зеркала больше 50% от поля зрения типичного разделения глаз для пользователей (6,5-7 см), то глаза могут оставаться в поле зрения. Поэтому, оба глаза могут быть получены системой 200 получения изображений для людей с глазным доминированием, так как в таком случае оба глаза могут остаться в поле зрения датчика изображения. Однако, диаметр радужной оболочки в полученном изображении может быть относительно мал, поскольку линза для датчика обычно выбирается так, чтобы охватить широкое поле зрения.
На фиг. 28 показана, без учета глазного доминирования, конфигурация для получения изображения обоих глаз, используя меньшее зеркало. Поле зрения зеркала меньше, за счет чего минимизируется его площадь в любой системе 200 получения изображений. Оба глаза могут быть получены, если пользователь располагается в центре зеркала. Однако, как описано выше, из-за глазного доминирования пользователь обычно располагается справа или слева от этого оптимального положения, как показано на фиг. 29 и 30. В этом сценарии один из глаз может выходить за пределы поля зрения камеры. Таким образом, хотя эта конфигурация имеет умеренно большое зеркало и даже если линза может быть выполнена с возможностью получения изображений обоих глаз (при расположении в центральном положении), за счет глазного доминирования система 200 получения изображений на практике может достоверно получить изображение только одного глаза.
На фиг. 31 представлен проект, который обладает более высокой разрешающей способностью изображения радужной оболочки по сравнению с фиг. 30 (то есть, улучшенными рабочими характеристиками распознавания радужной оболочки) и все еще использует небольшое зеркало, так что пользователем наблюдается только доминирующий глаз. Ограничивая размер зеркала так, чтобы только доминирующий глаз находился в поле зрения, тенденция для визуальной системы пользователя по выбору левого или правого глаза заключается в навязывании двоичной реакции (например, левый или правый глаз) в противоположность переменной или непредсказуемой реакции (например, глаза, смещенные влево или вправо) в поле зрения. В некоторых вариантах осуществления система 200 получения изображений может использовать или иметь в своем составе зеркало с диаметром приблизительно 14 мм при рабочем расстоянии приблизительно 9 дюймов, так что отражающее поле зрения зеркала соответствует приблизительно 2 типичным диаметрам радужной оболочки (2×10,5 мм). На фиг. 32 обобщаются и показаны размер эффективного поля зрения зеркала и его взаимосвязь с получением изображения 1 или 2 глаз, а также размер полученного изображения радужной оболочки.
На фиг. 33 показан один из вариантов осуществления системы 200 получения изображений, посредством которой фильтр, подавляющий инфракрасное излучение, помещается поверх участка датчика. Изображение лица или другое изображение могут быть получены участком датчика, в то время как изображение для распознавания радужной оболочки получают участком, покрытым фильтром, подавляющим инфракрасное излучение. Глазное доминирование имеет тенденцию вносить неопределенность в горизонтальном направлении из-за горизонтальной конфигурации человеческих глаз и поэтому система 200 получения изображений может быть соответственно конфигурирована с горизонтально сформированной областью фильтра над датчиком. На фиг. 34 показан другой вариант осуществления, в котором зеркало наклоняется так, что пользователь наблюдает узел датчика/линзы под углом и глаза находятся вблизи вершины датчика, а не в середине датчика. Эта конфигурация может позволить размещение фильтра, подавляющего инфракрасное излучение, на одном конце датчика, позволяя, таким образом, датчику иметь две различных области (с подавлением инфракрасного излучения и без подавления инфракрасного излучения), а не 3 области (без подавления инфракрасного излучения, с подавлением инфракрасного излучения и без подавления инфракрасного излучения), как в случае, показанном на фиг. 33. Это позволяет получить больший и лучше сопряженный участок сцены без радужной оболочки.
На фиг. 35 показан другой вариант осуществления системы 200 получения изображений, в которой оператор может держать устройство 200 получения изображений, чтобы получить изображение радужной оболочки пользователя. В этом варианте осуществления имеется прозрачный направляющий канал, через который оператор может видеть выравнивание с глазом пользователя. Кроме того, или альтернативно, разнесенные направляющие маркеры могут быть помещены сверху устройства 200 получения изображений, так чтобы оператор выравнивал глаз пользователя, например, с двумя маркерами. На фиг. 36 показан расширенный вид одного из вариантов осуществления направляющего канала. В этом варианте осуществления круговые кольца могут быть напечатаны на внутреннем участке направляющего канала, сзади и спереди направляющего канала, как показано на чертеже. Когда пользователь выровнен, эти кольца могут выглядеть как концентрические по отношению к оператору. В противном случае, они будут неконцентрическими (глаз пользователя выровнен неправильно). На фиг. 36 также показан светильник видимого света (светодиодный) на устройстве, а также инфракрасные светильники, которые могут использоваться для целей распознавания радужной оболочки. На фиг. 37 показан другой вариант осуществления системы получения изображений. В этом варианте осуществления светодиоды управляются контроллерами, которые, в свою очередь, соединяются с процессором, который также соединяется с датчиком, используемым для распознавания радужной оболочки.
На фиг. 38 показан один из вариантов осуществления способа для получения изображений радужной оболочки и сцены с использованием одного датчика изображения. Датчик изображения получает изображение сцены и изображение радужной оболочки по меньшей мере в одном изображения (этап 382). Модуль обработки изображений применяет уровень шумоподавления к первому участку этого по меньшей мере одного изображения, чтобы создать изображение сцены (этап 384). Модуль обработки изображений применяет пониженный уровень шумоподавления ко второму участку по меньшей мере одного изображения для создания изображения радужной оболочки для использования при биометрической идентификации (этап 386).
Дополнительно обращаясь к фиг. 38, и более подробно, датчик 202 изображения системы 200 получения изображений получает изображение сцены и изображение радужной оболочки по меньшей мере в одном изображении (этап 382). Датчик изображения может получить изображение сцены в одном изображении и изображение радужной оболочки в другом изображении. В некоторых вариантах осуществления датчик изображения может получать изображение сцены и изображение радужной оболочки в одном изображении. Например, изображение сцены может содержать по меньшей мере участок радужной оболочки. Датчик изображения может получить изображение сцены и изображение радужной оболочки во множестве изображений. Датчик изображения может получить изображение сцены в нескольких изображениях и изображение радужной оболочки в других изображениях. Датчик изображения может получить изображение сцены и изображение радужной оболочки в нескольких изображениях. Датчик изображения может получить два или более изображений в течение некоторого периода времени. Датчик изображения может получить два или более изображения в пределах коротких временных рамок относительно друг друга, например, для последующего сравнения или обработки. Датчик изображения может получить два или более изображений при различных условиях, например, при инфракрасном освещении или без него, используя или не используя любой тип фильтра, обсуждавшегося здесь.
В некоторых вариантах осуществления система 200 получения изображений может содержать режим получения радужной оболочки и режим получения изображения (например, отличного от радужной оболочки). Датчик изображения может получить изображение сцены в режиме получения изображения. Датчик изображения может получить изображение радужной оболочки в режиме получения радужной оболочки. В некоторых вариантах осуществления система 200 получения изображений может выполнить одновременное получение изображения радужной оболочки и изображения, отличного от радужной оболочки, в другом режиме. Пользователь может выбрать режим получения изображений, например, исполняя приложение на устройстве 200 получения изображений. В некоторых вариантах осуществления система получения изображений может получить изображение сцены и изображение радужной оболочки как отдельные компоненты в рамках одного изображения. Система получения изображений может получить изображение сцены и/или изображение радужной оболочки, используя любой вариант осуществления и/или комбинацию чередующегося фильтра, фильтра с подавлением инфракрасного излучения, фильтра, пропускающего инфракрасное излучение, и других описанных здесь типов фильтров.
В некоторых вариантах осуществления датчик изображения содержит множество узлов датчика изображения. Датчик изображения может активировать первый поднабор узлов датчика, выполненный главным образом с возможностью получения изображения радужной оболочки, пригодного для биометрической идентификации. Датчик изображения может активировать второй поднабор узлов датчика, выполненный главным образом с возможностью получения изображения, отличного от радужной оболочки. Фильтр, пропускающий инфракрасное излучение, фильтр (G+I) (например, позволяющий пропускать излучение G+I), или другой фильтр может быть применен на узле датчика, выполненном, главным образом с возможностью получения изображения радужной оболочки. Фильтр, пропускающий инфракрасное излучение, пропускающий видимое излучение, конкретные полосы частот, или цветной фильтр может быть применен на узле датчика, выполненном главным образом с возможностью получения изображения, отличного от радужной оболочки.
В некоторых вариантах осуществления датчик изображения получает по меньшей мере одно изображение радужной оболочки, когда радужная оболочка освещается инфракрасным освещением. Датчик изображения может получить по меньшей мере одно изображение радужной оболочки без инфракрасного освещения. Датчик изображения может получить по меньшей мере одно изображение радужной оболочки при выключенном светильнике видимого света. Датчик изображения может получить по меньшей мере одно изображение радужной оболочки, используя освещение от экрана системы 200 получения изображений. Датчик изображения может получить по меньшей мере одно изображение радужной оболочки, когда радужная оболочка выровнена с участком датчика, используя для направления зеркало системы 200 получения изображений. Датчик изображения может получить по меньшей мере одно изображение радужной оболочки, когда радужная оболочка выровнена с участком датчика оператором, использующим прозрачный направляющий канал и/или маркеры.
Дополнительно обращаясь к (этапу 384), модуль обработки изображений может применить уровень шумоподавления к первому участку по меньшей мере одного изображения, чтобы создать изображение сцены. Система 200 получения изображений может применить шумоподавление к изображению, полученному датчиком изображения. Система 200 получения изображений может применить шумоподавление к изображению, хранящемуся в системе 200 получения изображений, например, в устройстве хранения данных или в буфере. Система 200 получения изображений может применить шумоподавление, содержащее применение усреднения или медианной функции или фильтра на некотором количестве пикселей изображения, например, на пиксельном окне 3x3. Система 200 получения изображений может применять шумоподавление, содержащее подавление в полученном изображении зависимого от времени и независимого от времени шума или того и другого типа шума. Во время обработки изображений или шумоподавления система 200 получения изображений может учитывать или исключать известный дефектный пиксель. Система 200 получения изображений может применять шумоподавление, используя модуль обработки изображений, который может содержать один или более сигнальных видеопроцессоров 206 и/или другой процессор 208. Система 200 получения изображений может применить шумоподавление, идентифицируя, учитывая и/или компенсируя наличие систематического шума.
В некоторых вариантах осуществления модуль обработки изображений может применить шумоподавление к изображению, полученному в режиме получения изображения, отличного от радужной оболочки. Модуль обработки изображений может применять уровень шумоподавления к участку изображения, отличного от радужной оболочки, для биометрической идентификации, например, к участку, соответствующему фильтру, подавляющему инфракрасное излучение. Модуль обработки изображений может применить шумоподавление или фильтрацию к общему изображению или изображению, отличному от радужной оболочки. Модуль обработки изображений может формировать изображение общей сцены, которое воспринимается лучше (например, человеком), чем изображение перед шумоподавлением.
Дополнительно обращаясь к (этапу 386), модуль обработки изображений может применять пониженный уровень шумоподавления ко второму участку по меньшей мере одного изображения, чтобы создать изображение радужной оболочки для использования при биометрической идентификации. В некоторых вариантах осуществления модуль обработки изображений может отключать шумоподавление на изображении для использования в биометрической идентификации по радужной оболочке. Модуль обработки изображений может определить, что уровень помех не разрушает полученную текстуру радужной оболочки. Модуль обработки изображений может выполнять биометрическую идентификацию по радужной оболочке, основываясь на сыром или необработанном изображении, полученном датчиком изображения. Модуль обработки изображений может выполнять биометрическую идентификацию по радужной оболочке, основываясь на изображении, полученном датчиком изображения, после некоторой обработки, например, удаления артефактов, спорадического шума и/или систематического шума.
В некоторых вариантах осуществления модуль обработки изображений может применять пониженный уровень шумоподавления к изображению для использования при биометрической идентификации по радужной оболочке. Модуль обработки изображений может применять пониженный уровень шумоподавления к изображению, получаемому в режиме получения радужной оболочки. Модуль обработки изображений может выполнять шумоподавление для систематического и/или спорадического шума. Модуль обработки изображений может отключать шумоподавление для несистематического шума. Модуль обработки изображений может применить пониженный уровень шумоподавления к участку изображения, извлеченному для биометрической идентификации по радужной оболочке, например, к участку, соответствующему фильтру, пропускающему инфракрасное излучение. Модуль обработки изображений может применять снижение систематического шума к участку изображения, извлеченному для биометрической идентификации по радужной оболочке, например, участку, соответствующему фильтру, пропускающему инфракрасное излучение.
В некоторых вариантах осуществления модуль 220 обработки изображений вычитает шум, взятый из одного изображения радужной оболочки, из шума, взятого из другого изображения радужной оболочки. Такое вычитание может привести в результате к пониженному систематическому шуму и/или спорадическому шуму. Модуль 220 обработки изображений может выровнять два изображения, чтобы осуществить вычитание. Модуль 220 обработки изображений может выровнять два изображения, используя общие опорные точки для ссылки (например, край формы). Модуль 220 обработки изображений может выровнять два изображения, используя распознавание/совпадение образов, корреляцию и/или другие алгоритмы. Модуль 220 обработки изображений может вычесть шум, соответствующий накладывающемуся друг на друга участку двух изображений. Модуль 220 обработки изображений может уменьшить окружающий шум в одном изображении, используя окружающий шум из другого изображения. Окружающий шум может содержать сигналы от фонового освещения или целевого освещения. Окружающий шум может содержать артефакты от источников окружающего освещения или отражений окружающих объектов от поверхности глаза. В некоторых вариантах осуществления модуль 220 обработки изображений может уменьшить окружающий шум от одного изображения, полученного в присутствии инфракрасного освещения, используя окружающий шум от другого изображения, полученного без инфракрасного освещения.
В некоторых вариантах осуществления модуль 220 обработки изображений может получать инфракрасный компонент из одного или более пикселей (G+I), отображенных на матрице узлов датчика. Модуль 220 обработки изображений может вычесть компоненту G из (G+I), используя значение интенсивности G в соседнем пикселе. В некоторых вариантах осуществления модуль 220 обработки изображений может вычесть компоненту G, используя предполагаемое значение интенсивности G. Модуль 220 обработки изображений может использовать предполагаемое значение интенсивности G при обработке участка изображения, отличного от радужной оболочки (например, общая сцена). В некоторых вариантах осуществления модуль 220 обработки изображений может выполнить регулирование или коррекцию усиления или яркости на участке по меньшей мере одного изображения для создания изображения радужной оболочки, используемого при биометрической идентификации. В некоторых вариантах осуществления количество инфракрасного освещения может быть недостаточным или субоптимальным, так что регулирование или корректировка усиления или яркости могут улучшить качество изображения радужной оболочки. В некоторых вариантах осуществления регулирование или корректировка усиления или яркости могут быть предпочтительнее, чем добавление инфракрасных светильников, расходующих мощность для обеспечения инфракрасного освещения, и/или управление инфракрасным освещением (например, при различных условиях). Так как инфракрасные сигналы получают часть узлов датчиков/пикселей (например, в матрице RGB(G+I)), может быть пригодна компенсация посредством регулирования или коррекции усиления или яркости.
После описания определенных вариантов осуществления способов и систем, любому специалисту в данной области техники должно быть очевидно, что могут использоваться и другие варианты осуществления, содержащие концепции настоящего изобретения. Следует понимать, что системы, описанные выше, могут обеспечивать множество любых или каждых из этих компонент и эти компоненты могут использоваться на автономной машине или, в некоторых вариантах осуществления, на множестве машин в распределенной системе. Системы и способы, описанные выше, могут быть осуществлены как способ, устройство или изделие, использующие способы программирования и/или технические способы для создания программного обеспечения, встроенных программ, технических средств или любой их комбинации. Кроме того, описанные выше системы и способы могут предоставляться как одна или более машиночитаемых программ, реализованных в одном или более изделиях. Термин «изделие» в контексте настоящего изобретения подразумевает управляющую программу или логику, доступные и введенные в одно или более машиночитаемых устройств, встроенные программы, программируемую логику, запоминающие устройства (например, EEPROM, ROM, PROM, RAM, SRAM и т.д.), технические средства (например, кристалл с интегральными схемами, программируемая логическая интегральная схема (FPGA), специализированная интегральная схема (ASIC) и т.д.), электронные устройства, машиночитаемое долговременное запоминающее устройство (например, CD-ROM, дискета, жесткий диск и т.д.). Изделие может быть доступным с файлового сервера, обеспечивающего доступ к машиночитаемым программам через линию передачи сети, среду беспроволочной передачи, сигналы, распространяющиеся через пространство, радиоволны, инфракрасные сигналы и т.д. Изделие может быть картой флэш-памяти или магнитной лентой. Изделие содержит логику аппаратурного обеспечения, а также программное обеспечение или программируемую управляющую программу, встроенную в машиночитаемый носитель, которая исполняется процессором. В целом, машиночитаемые программы могут быть реализованы на любом языке программирования, таком как LISP, PERL, C, C++, C#, PROLOG, или на любом байтовом кодовом языке, таком как JAVA. Программы могут храниться на одном или в одном или более изделиях в качестве объектного кода.
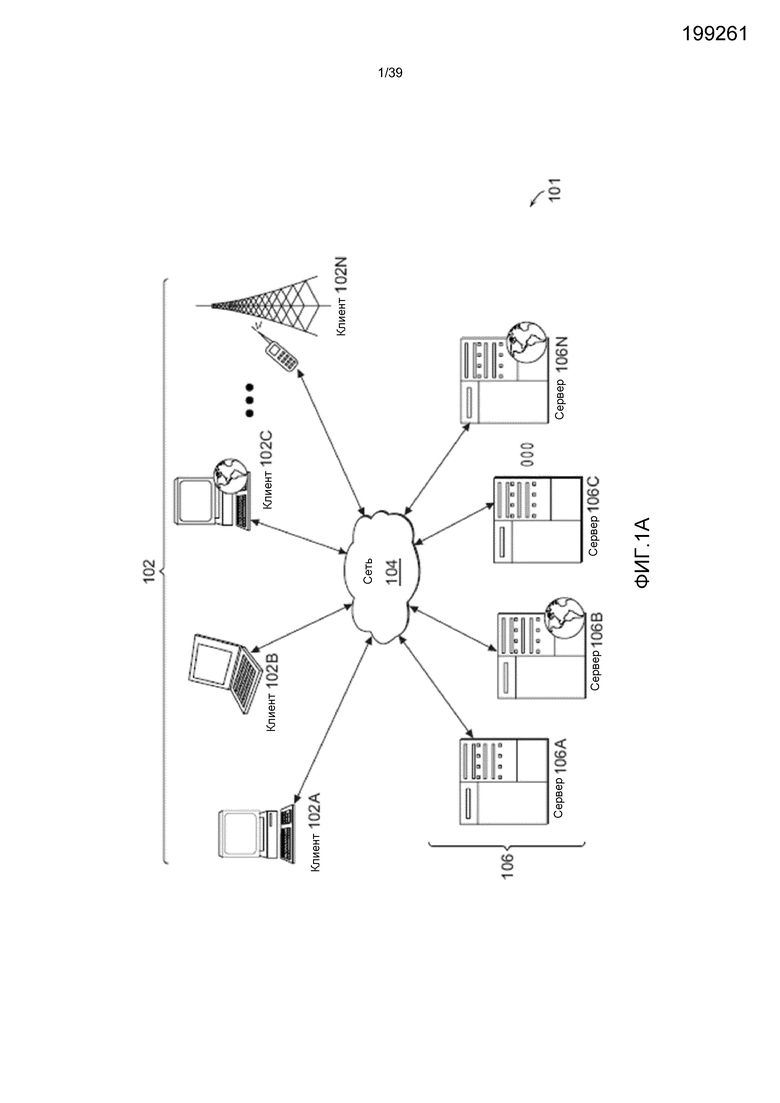
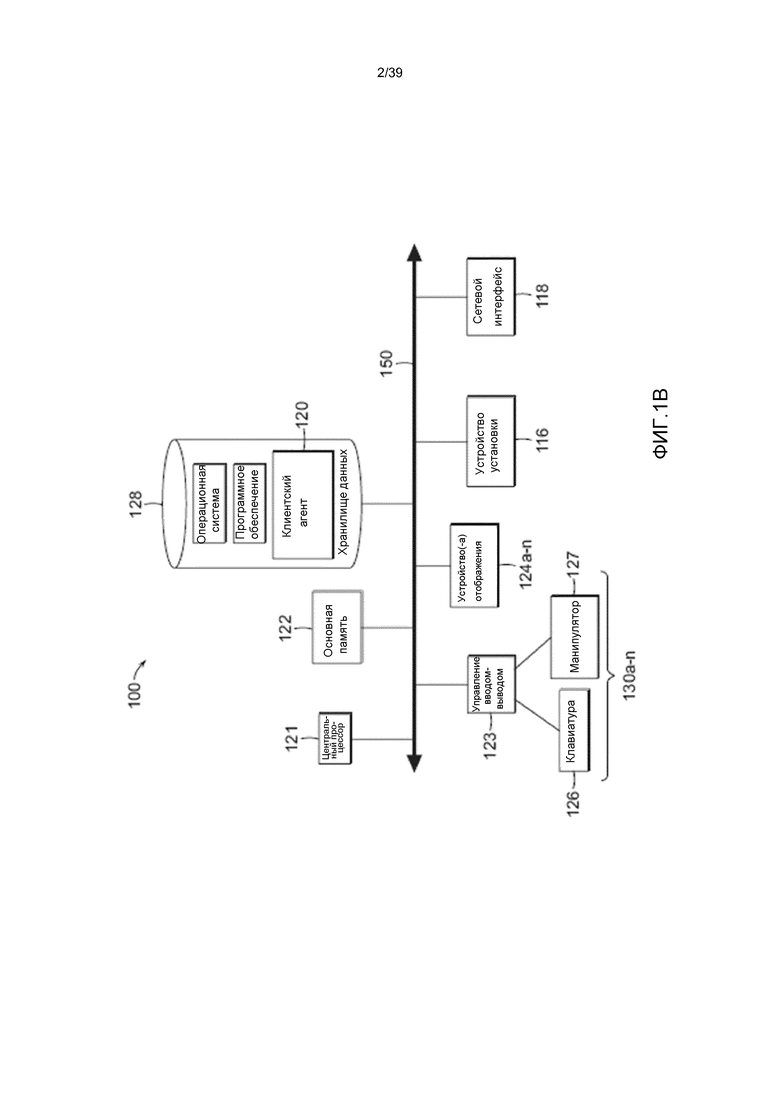
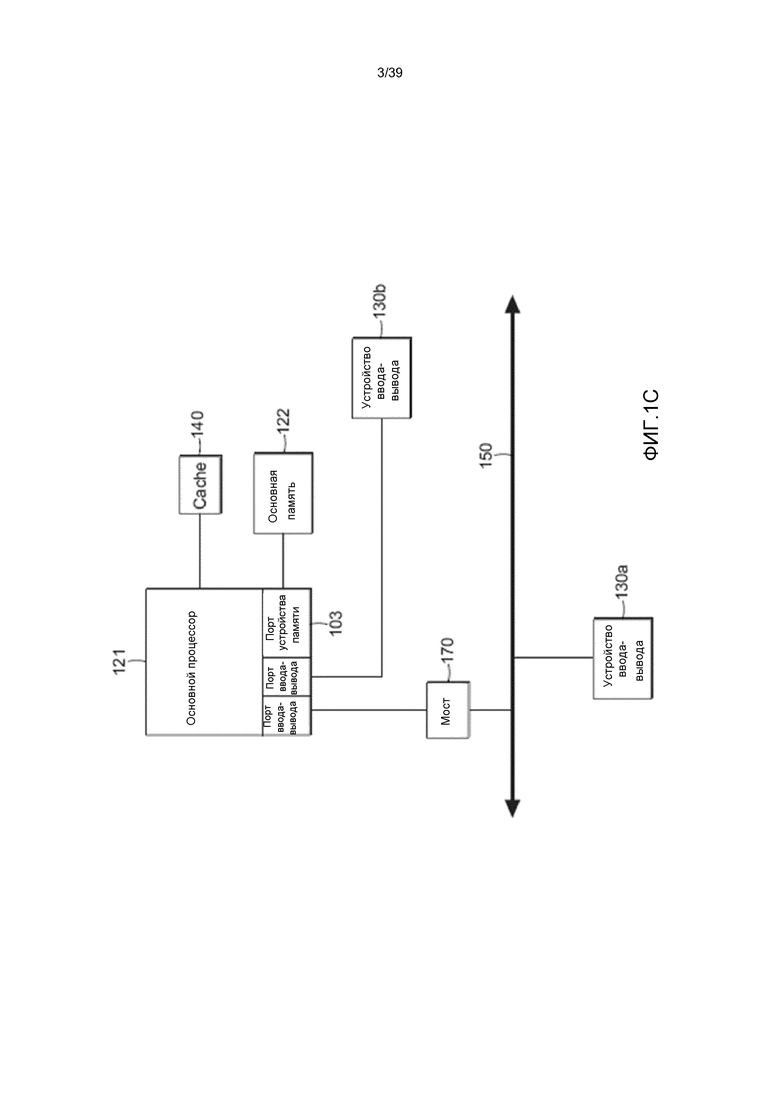
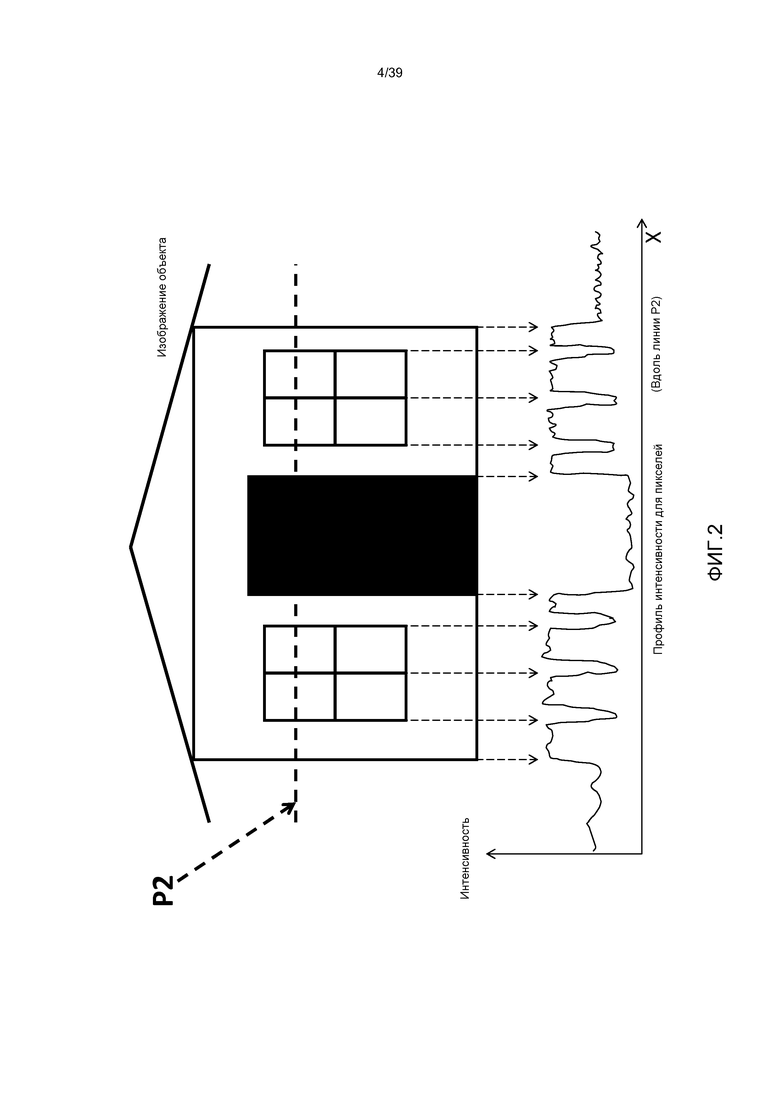
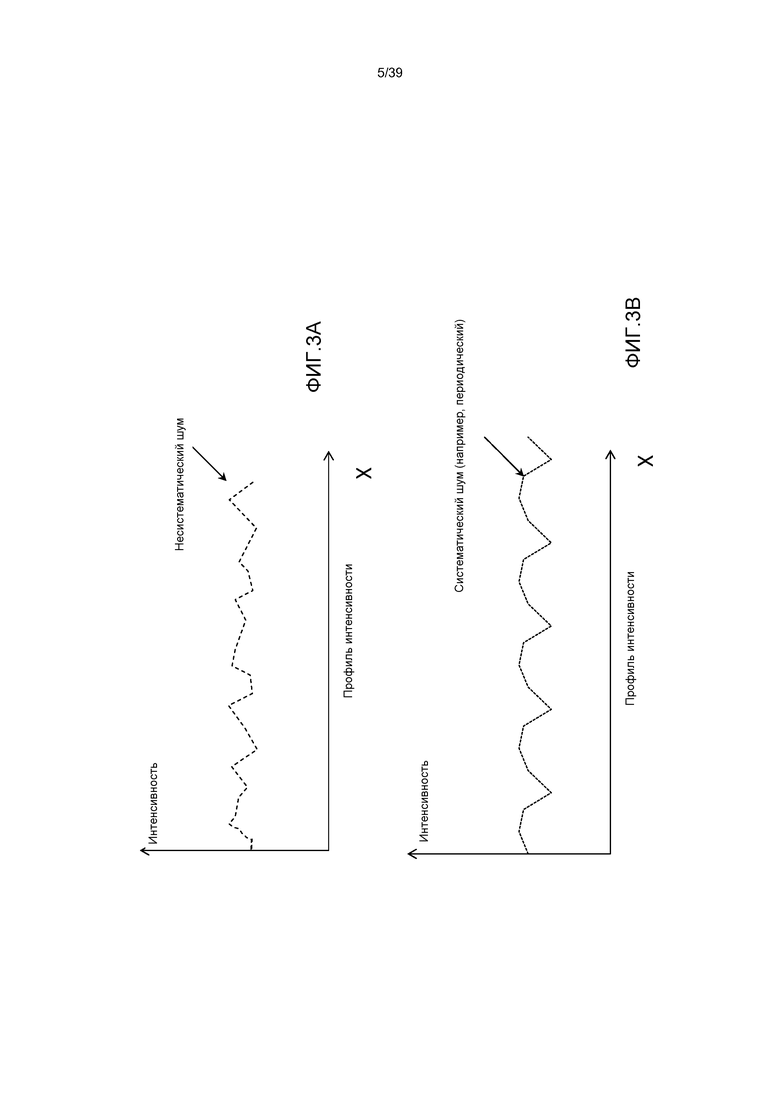
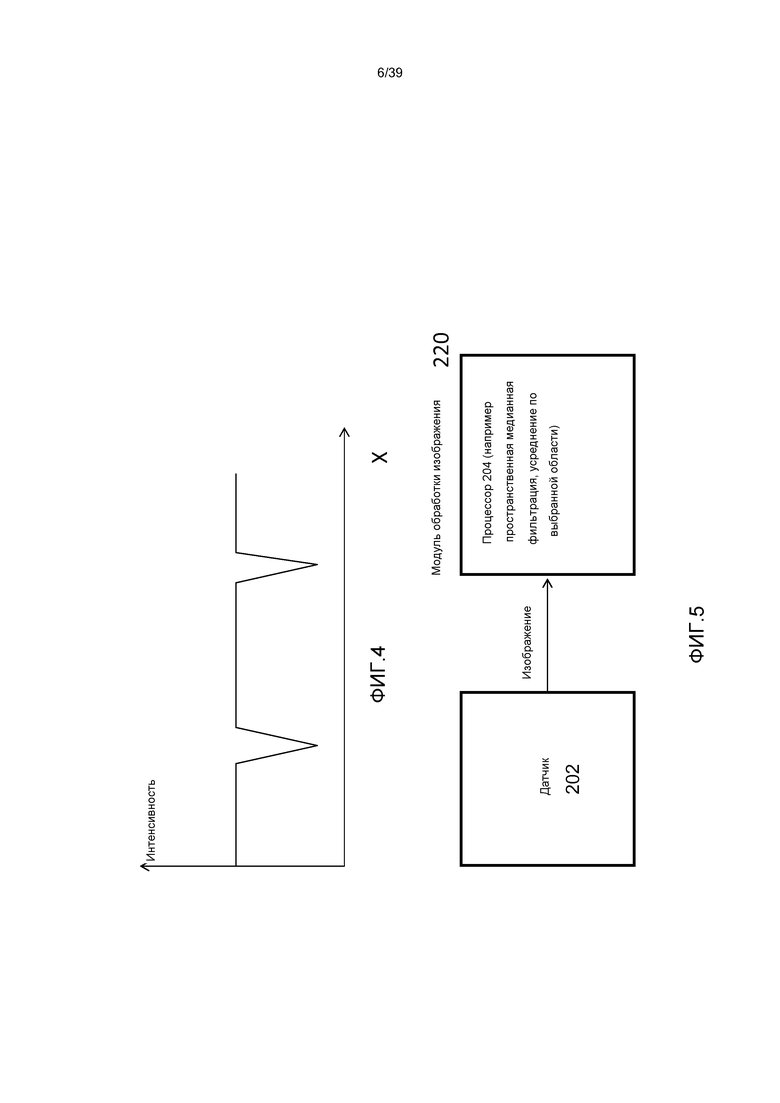
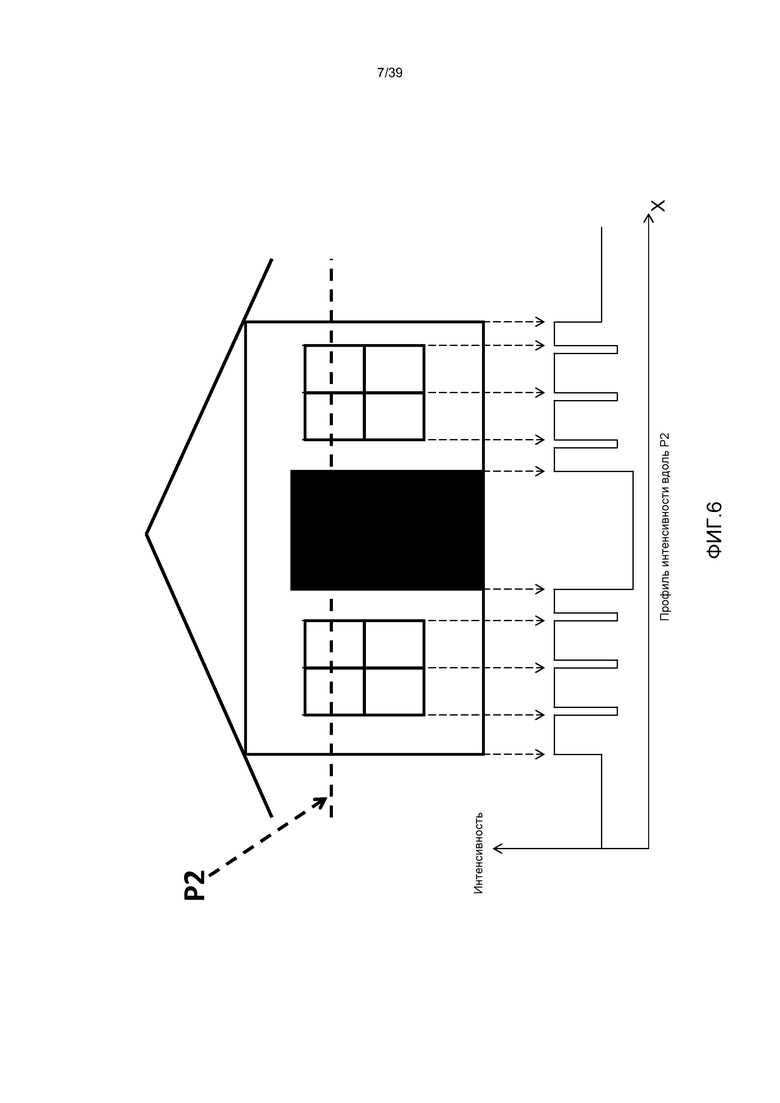
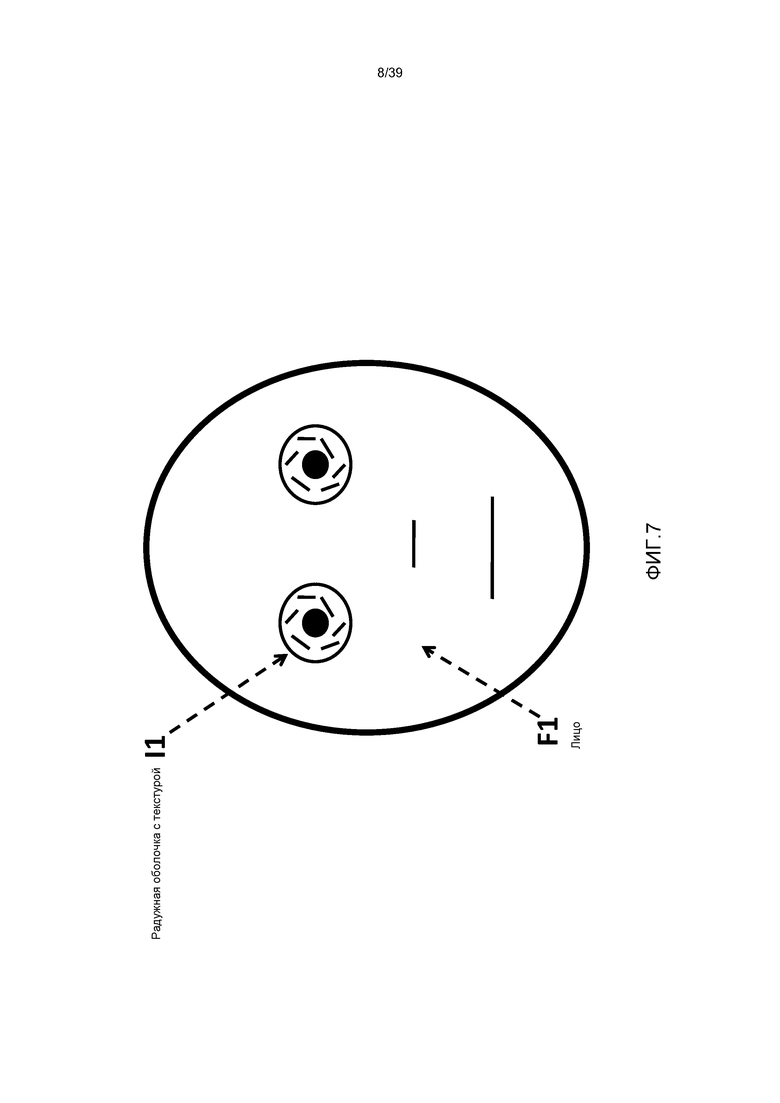
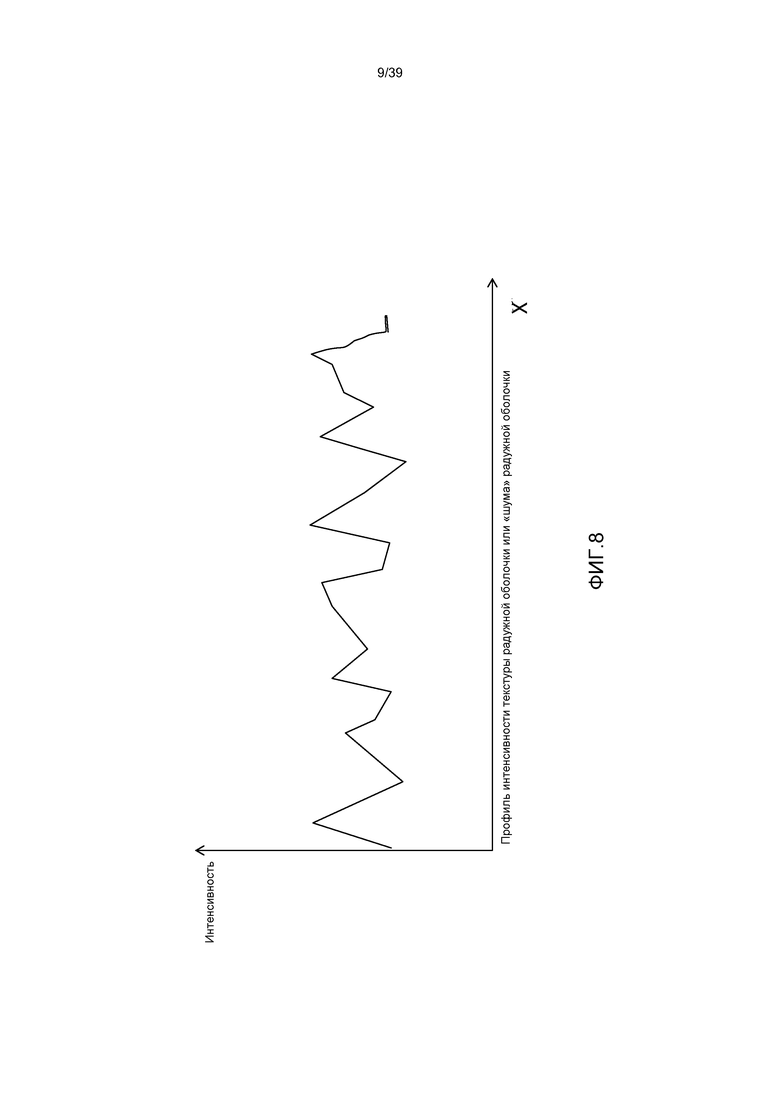
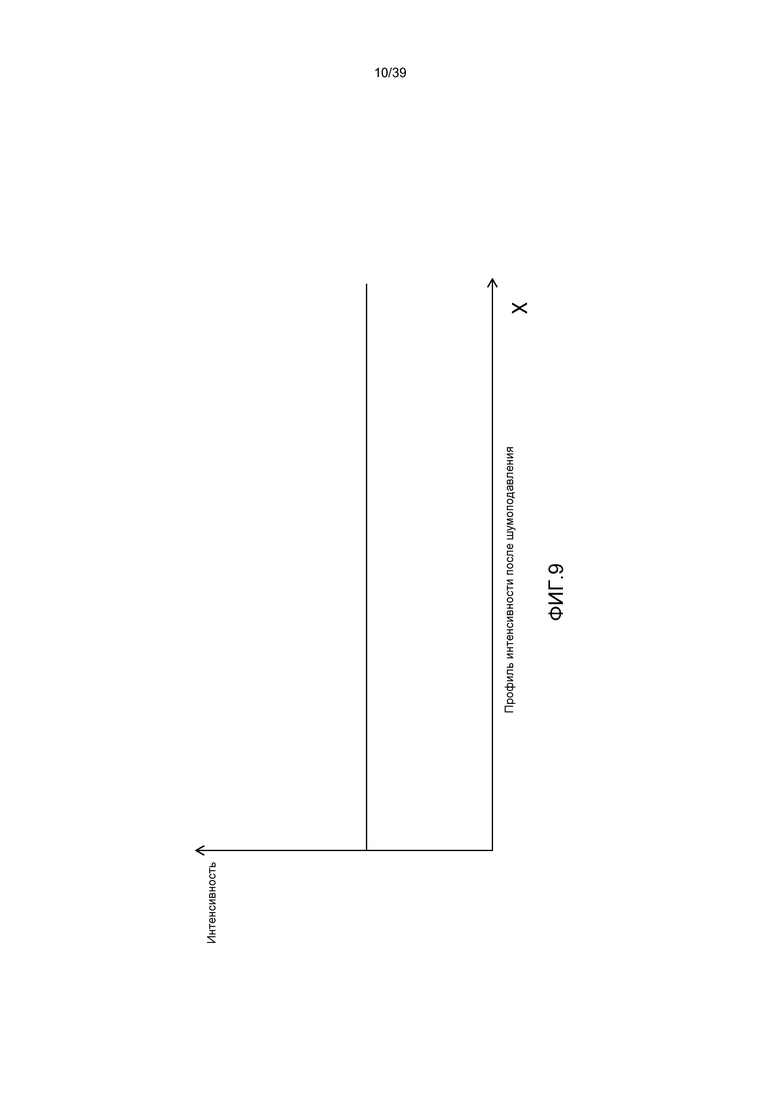
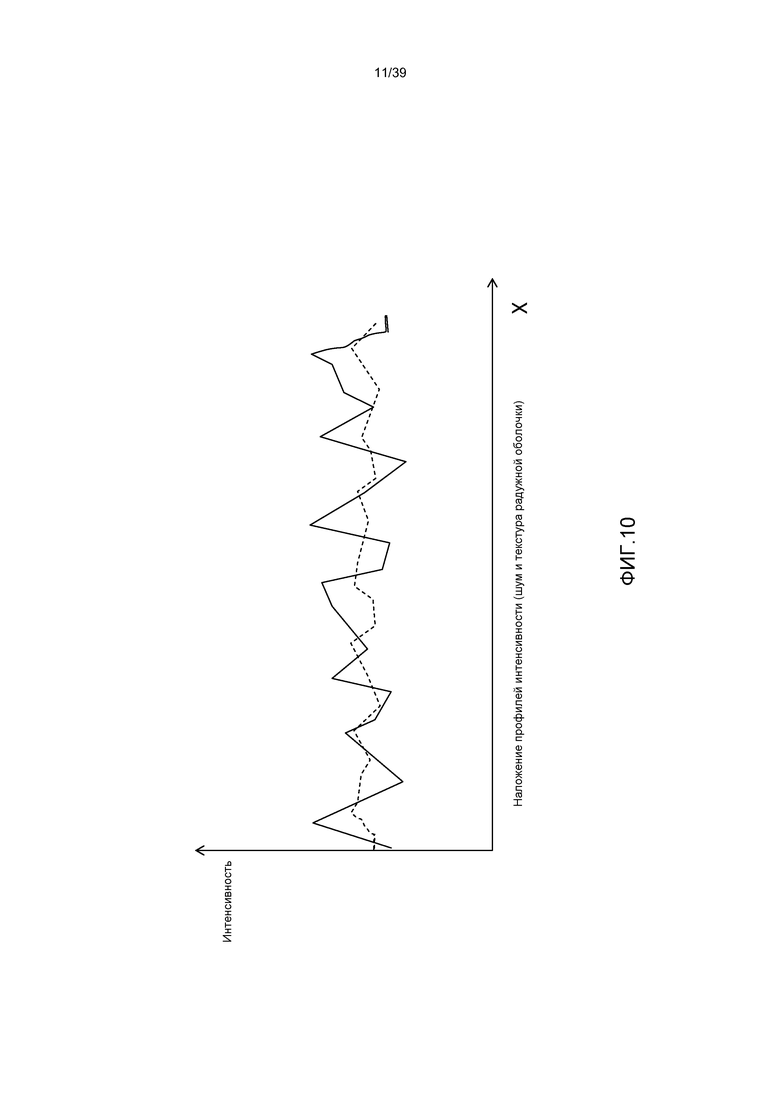
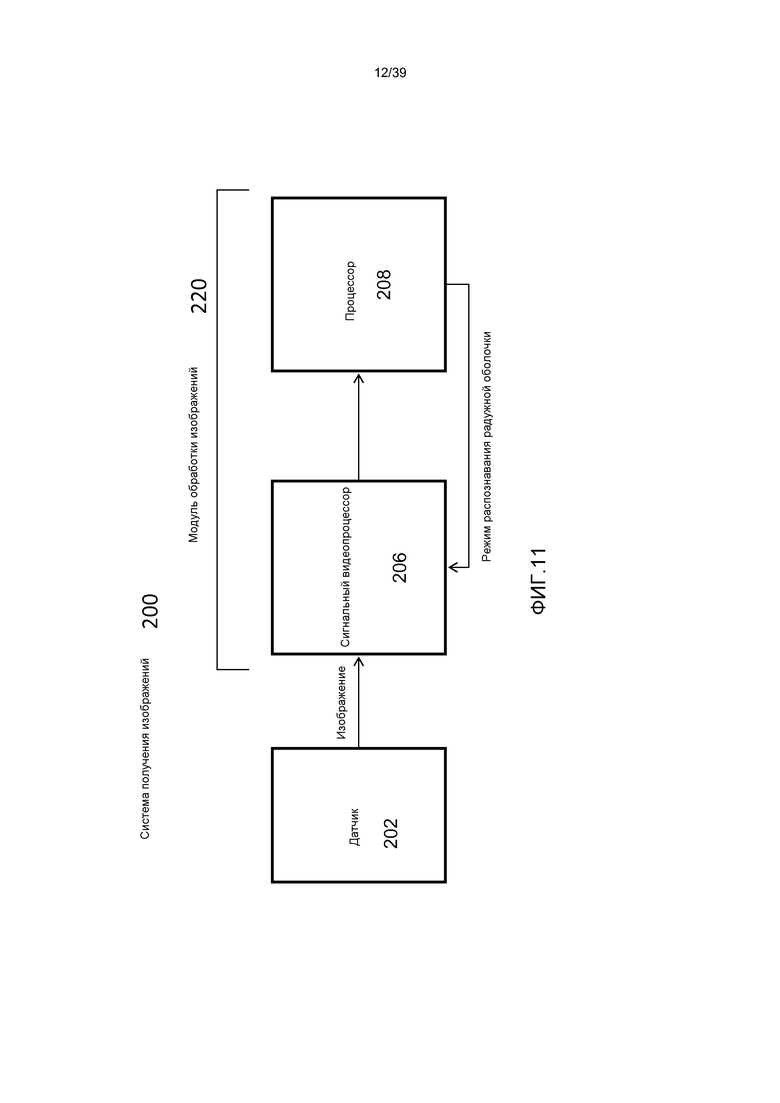
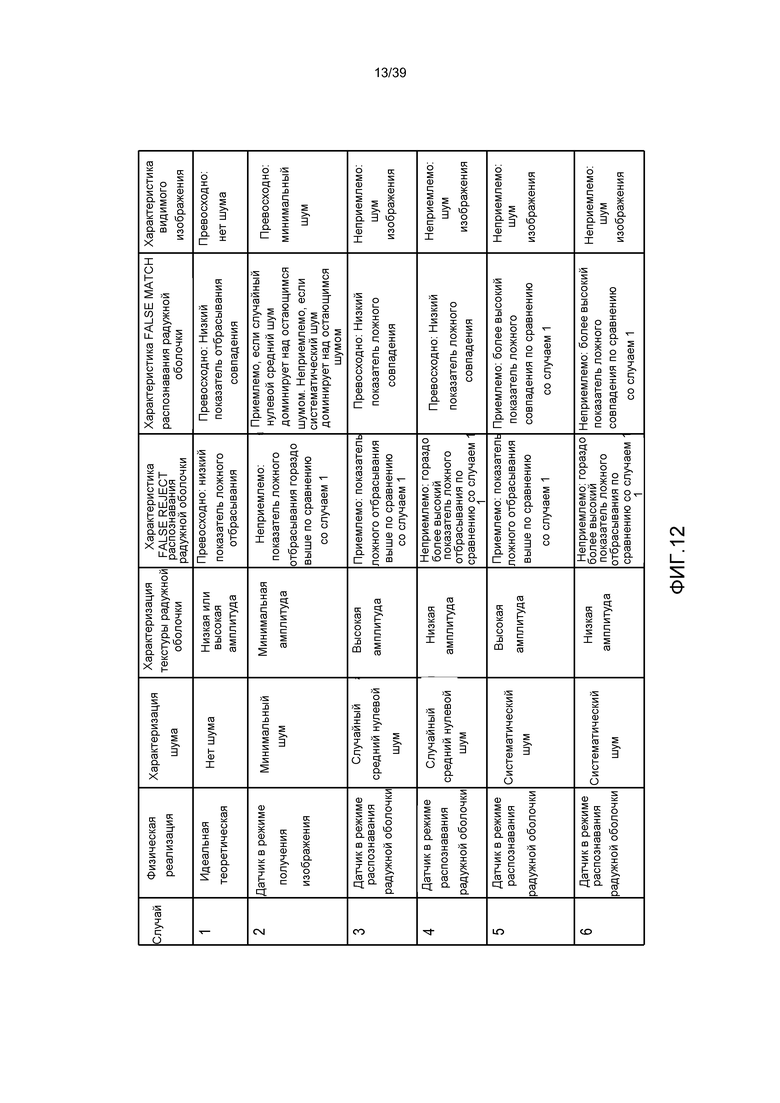
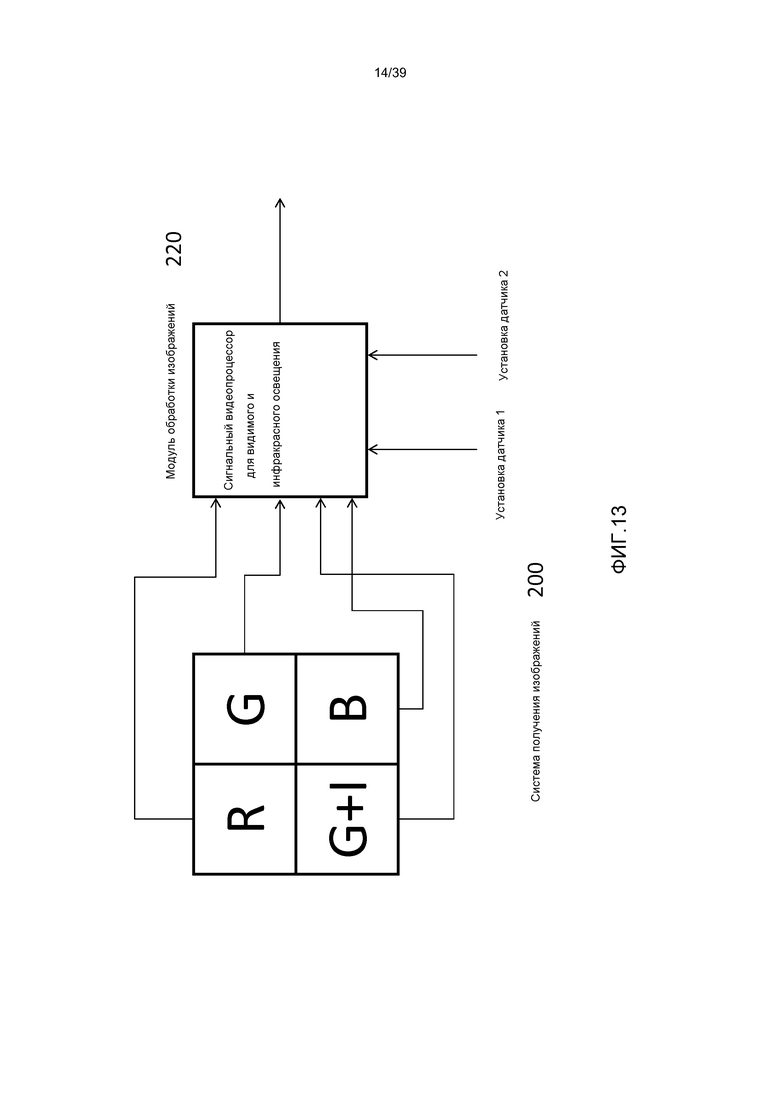
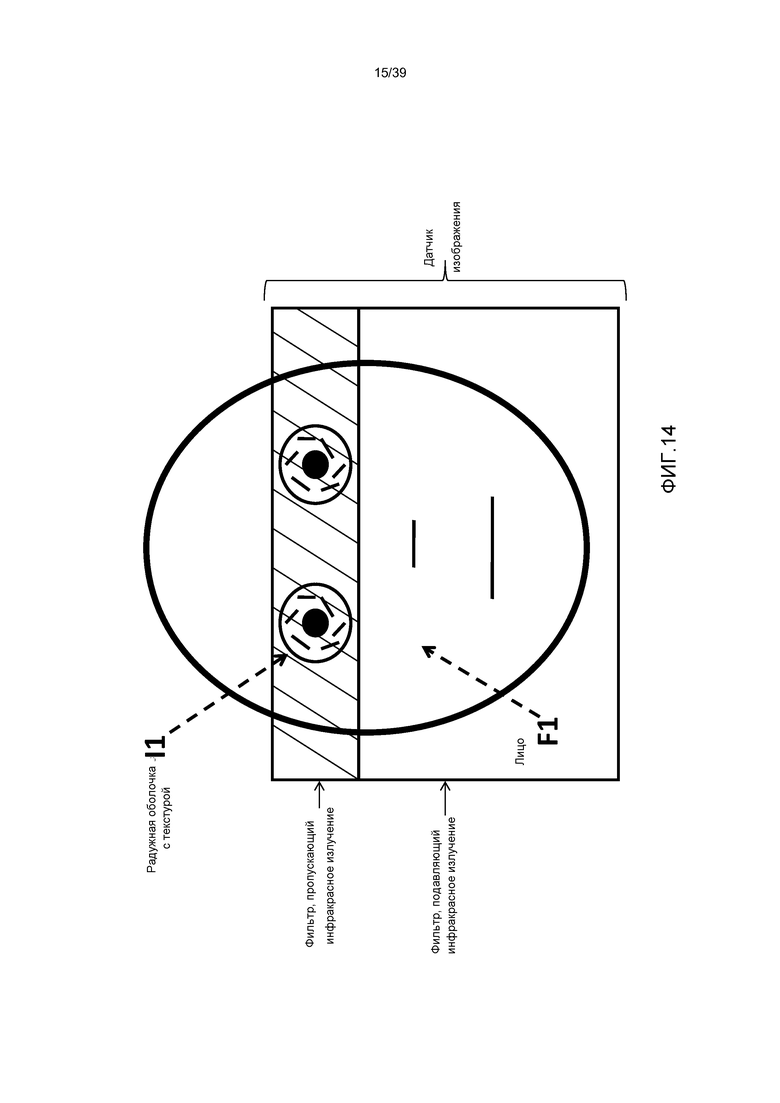
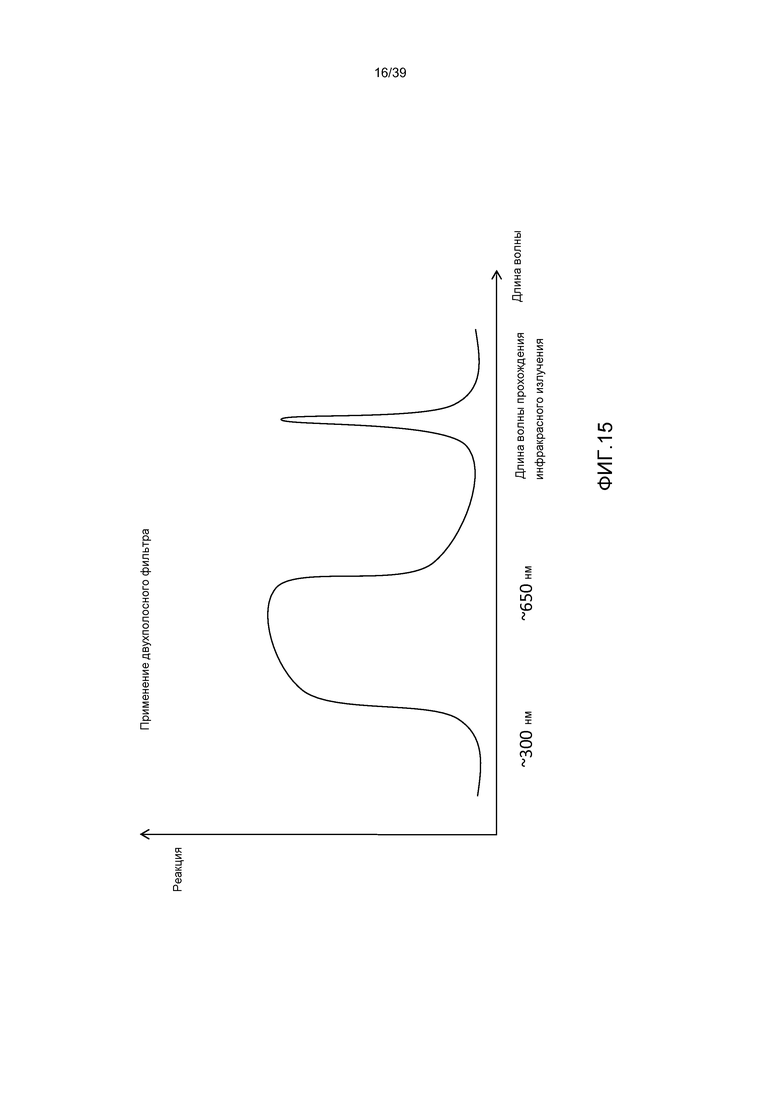
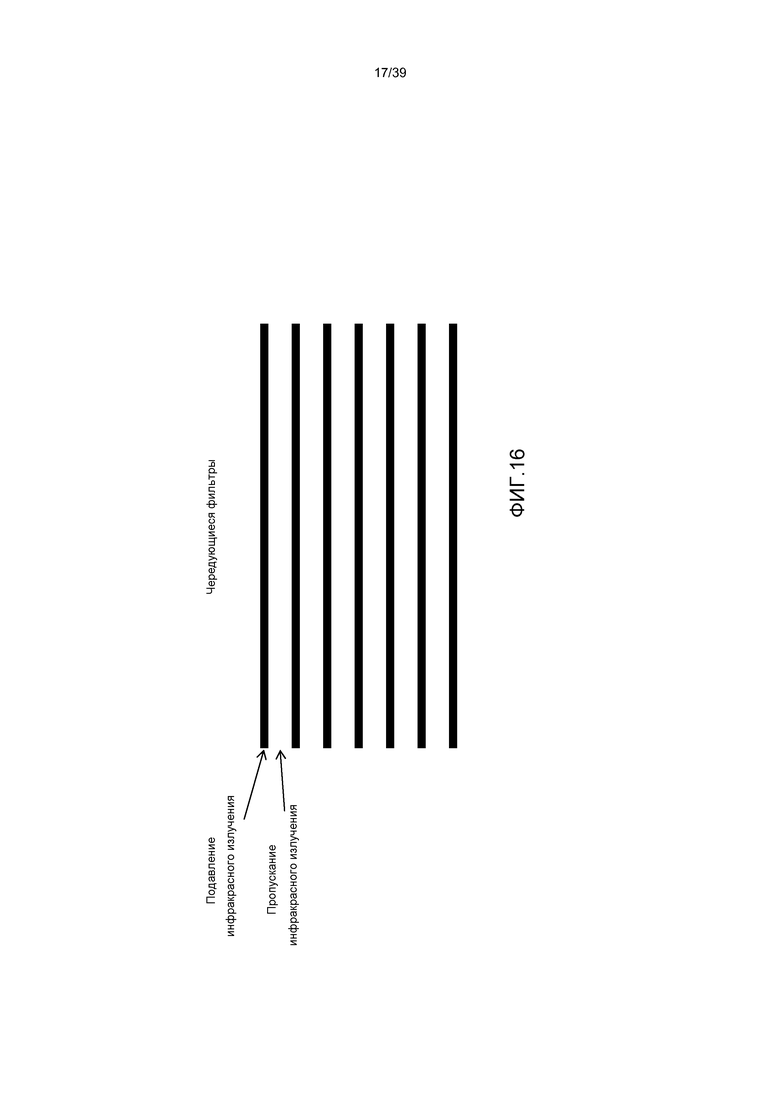
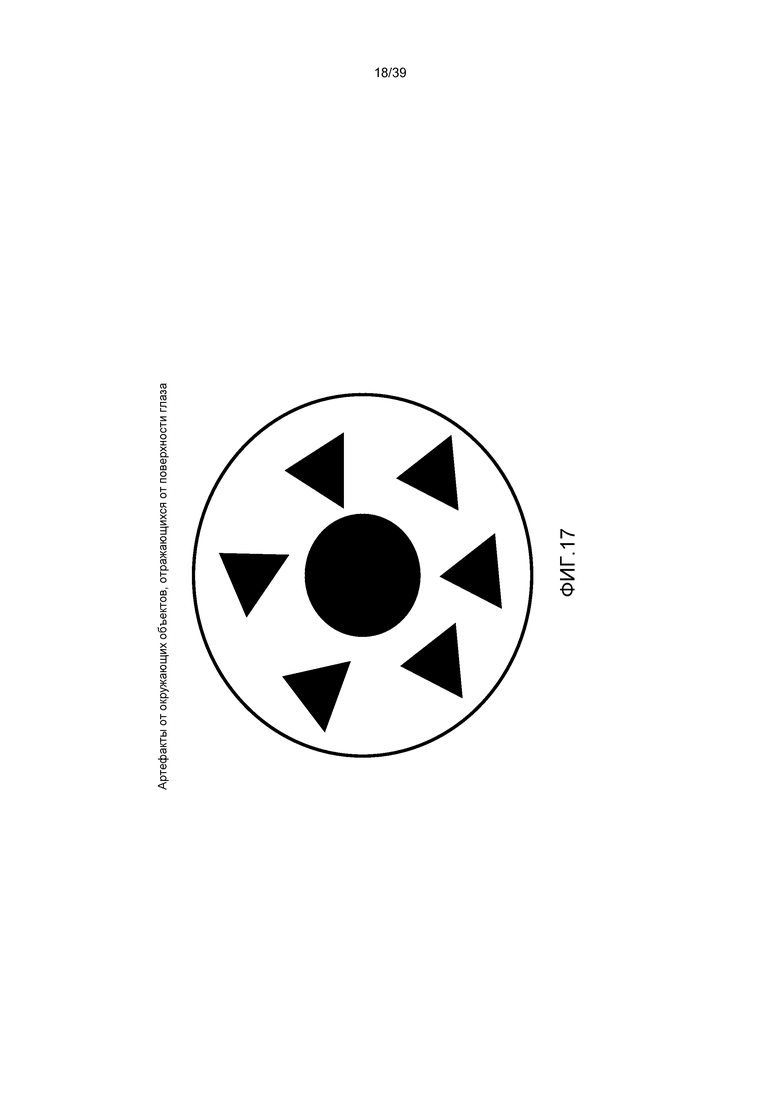
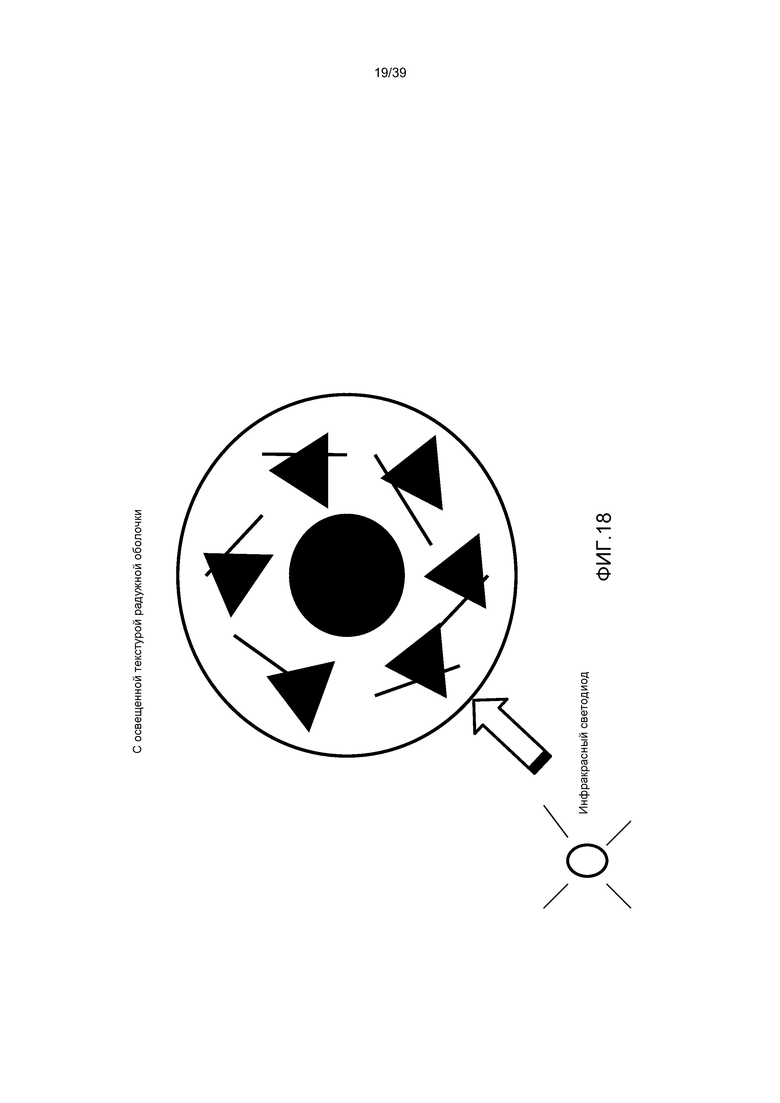
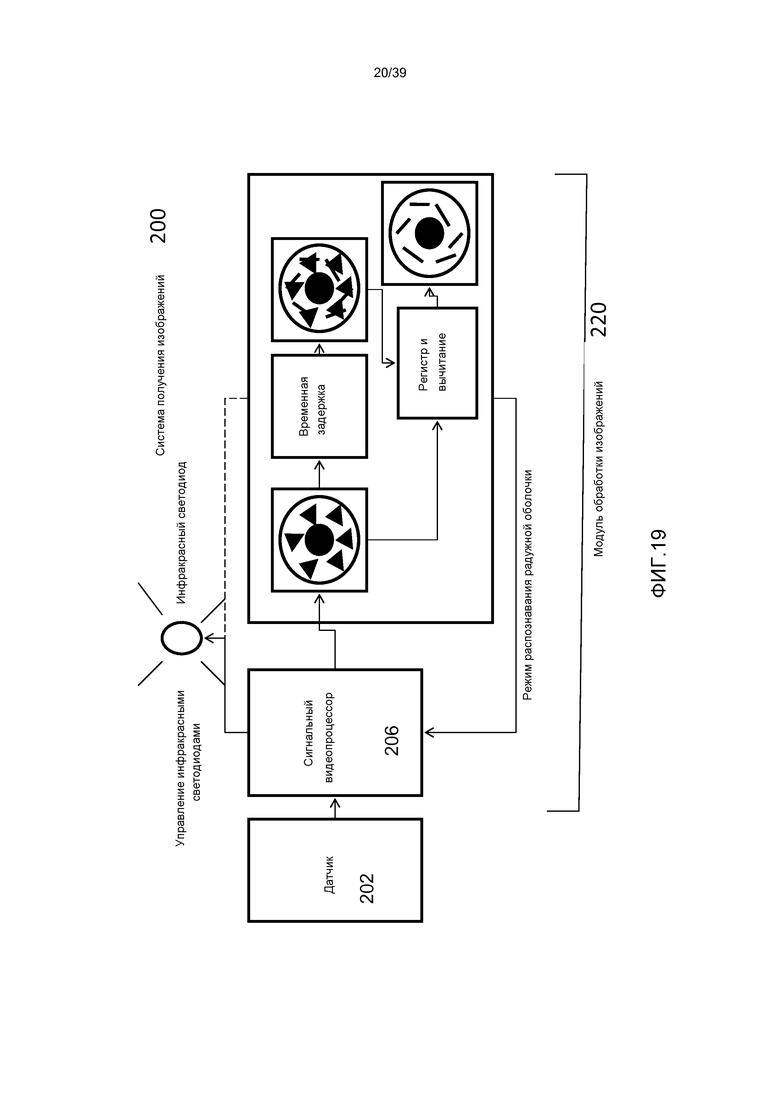
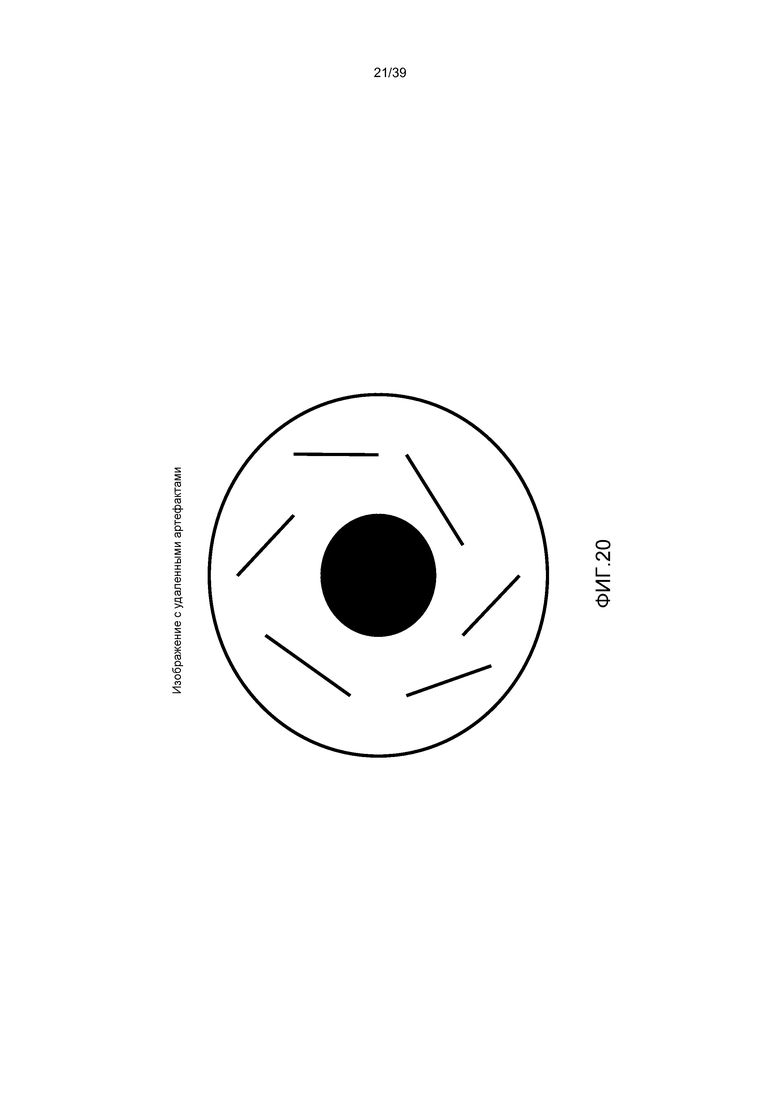
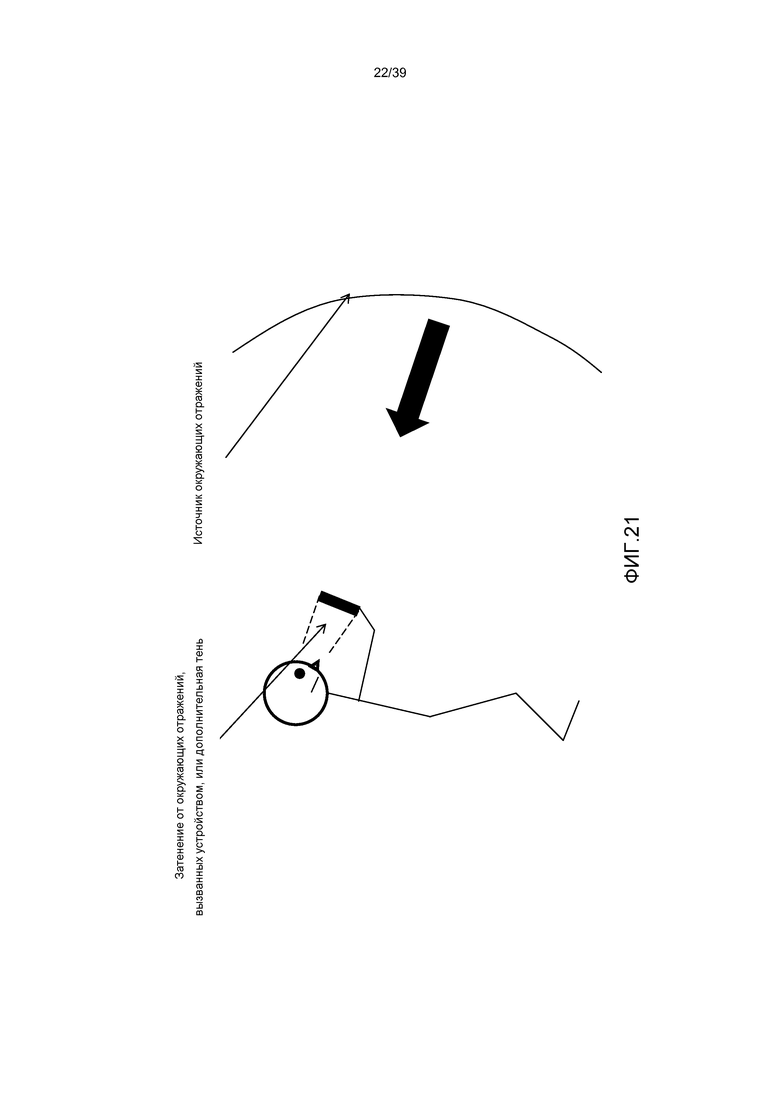
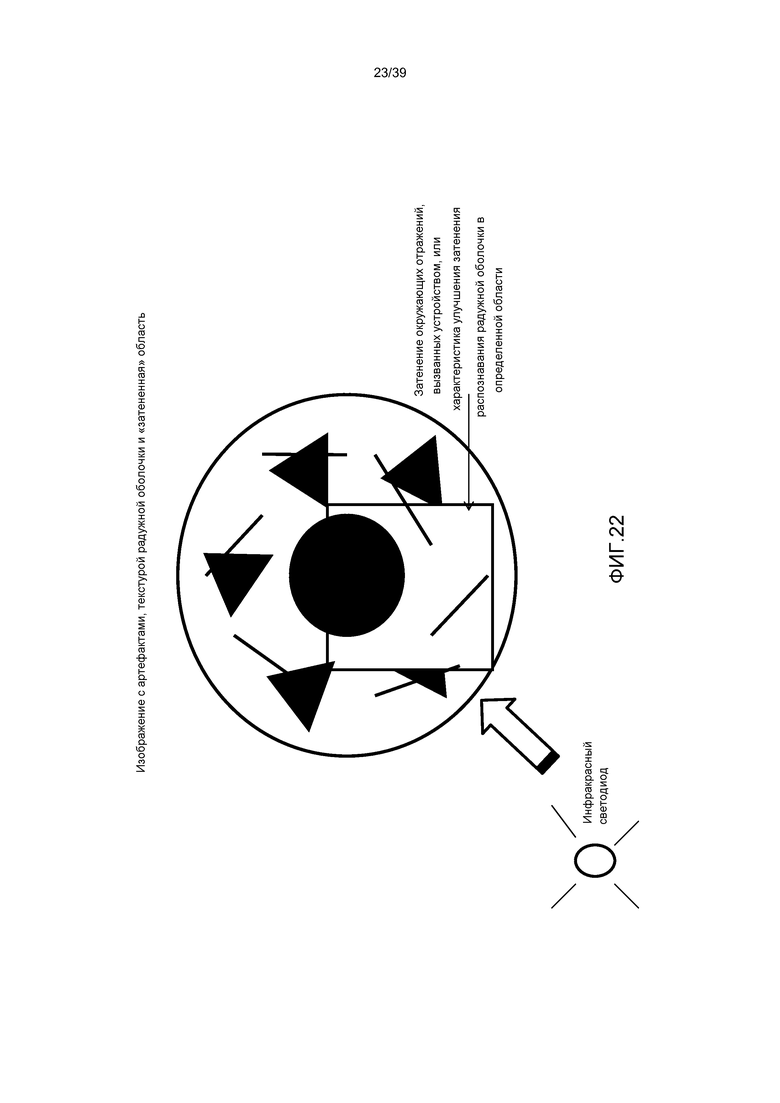
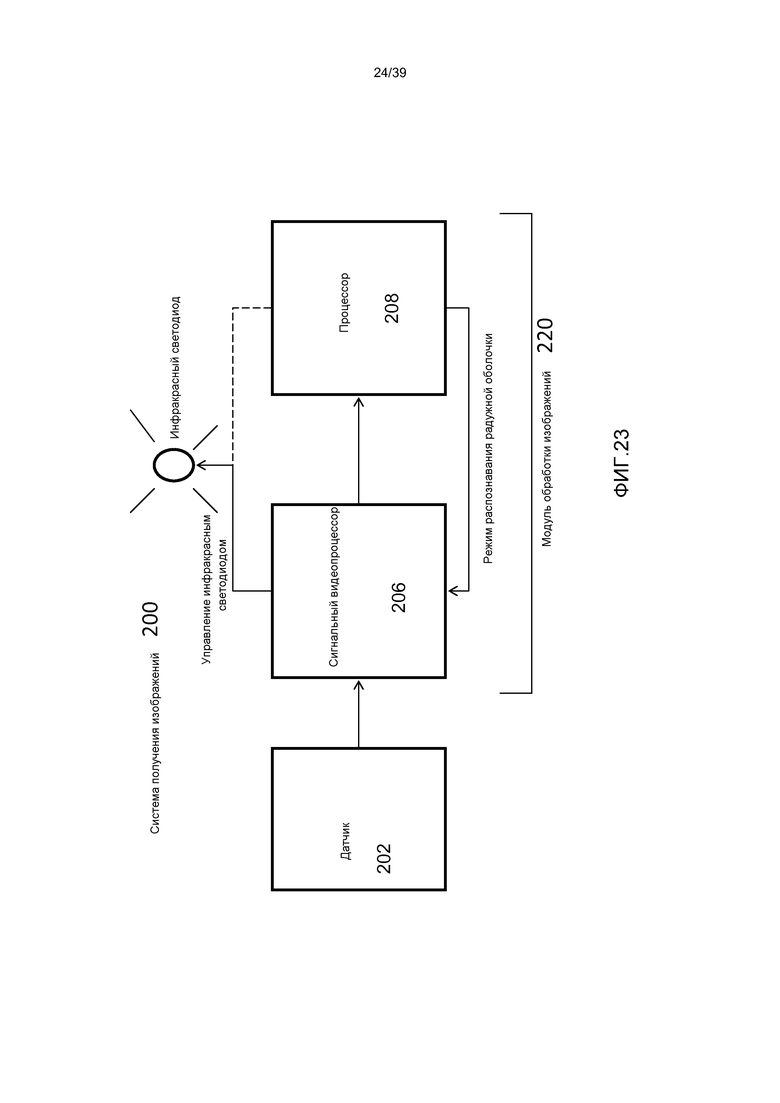
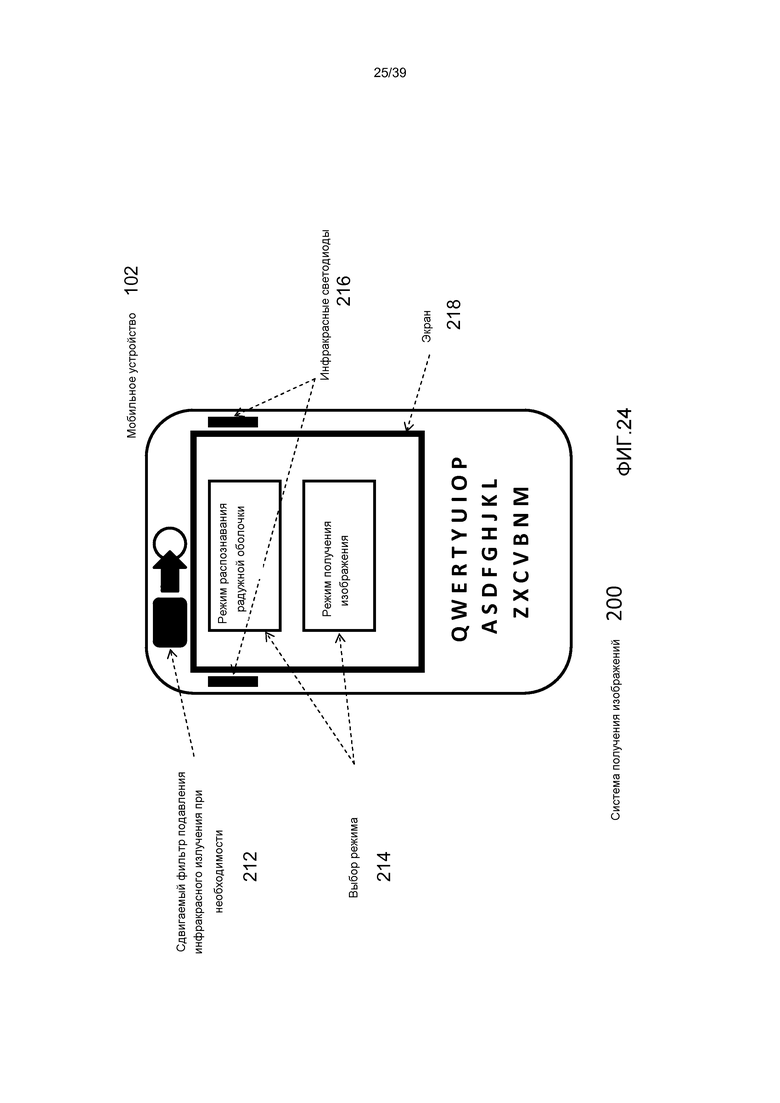
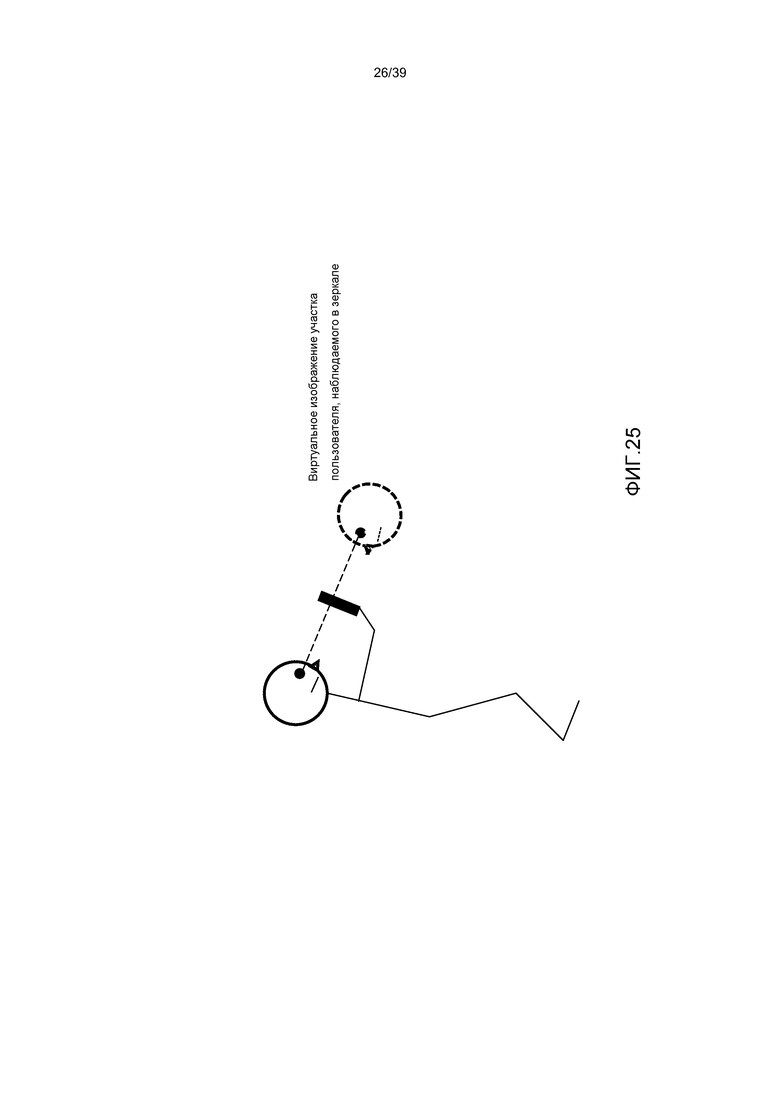
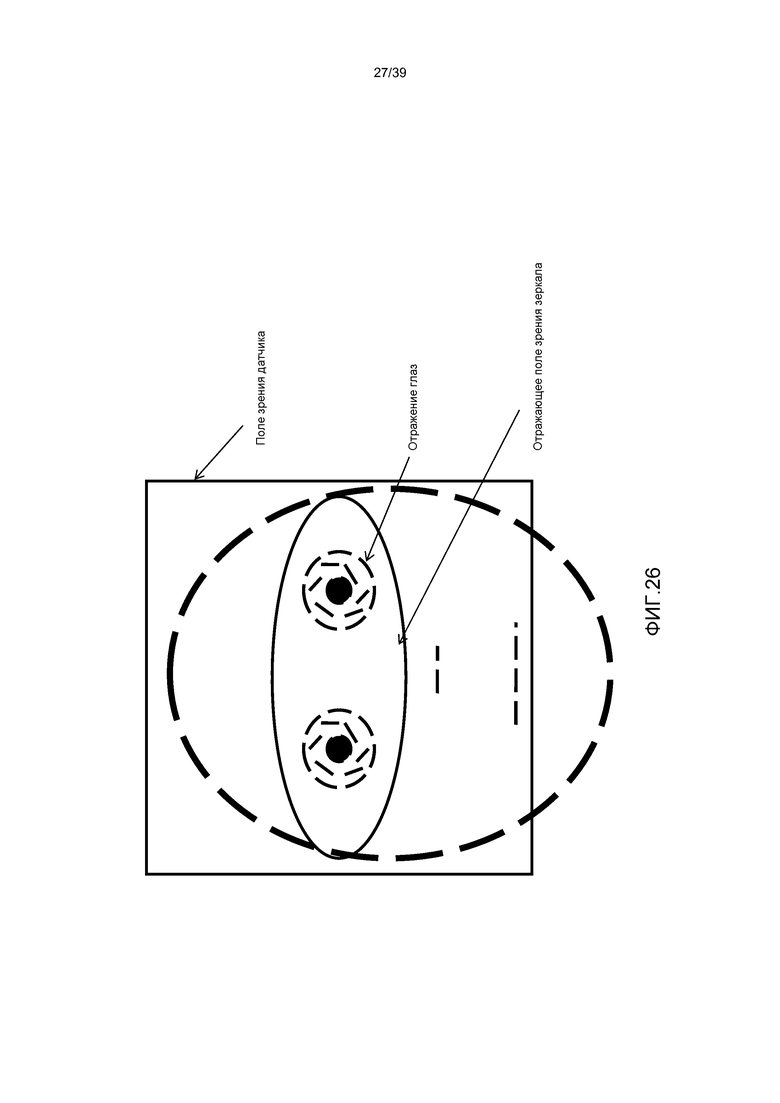
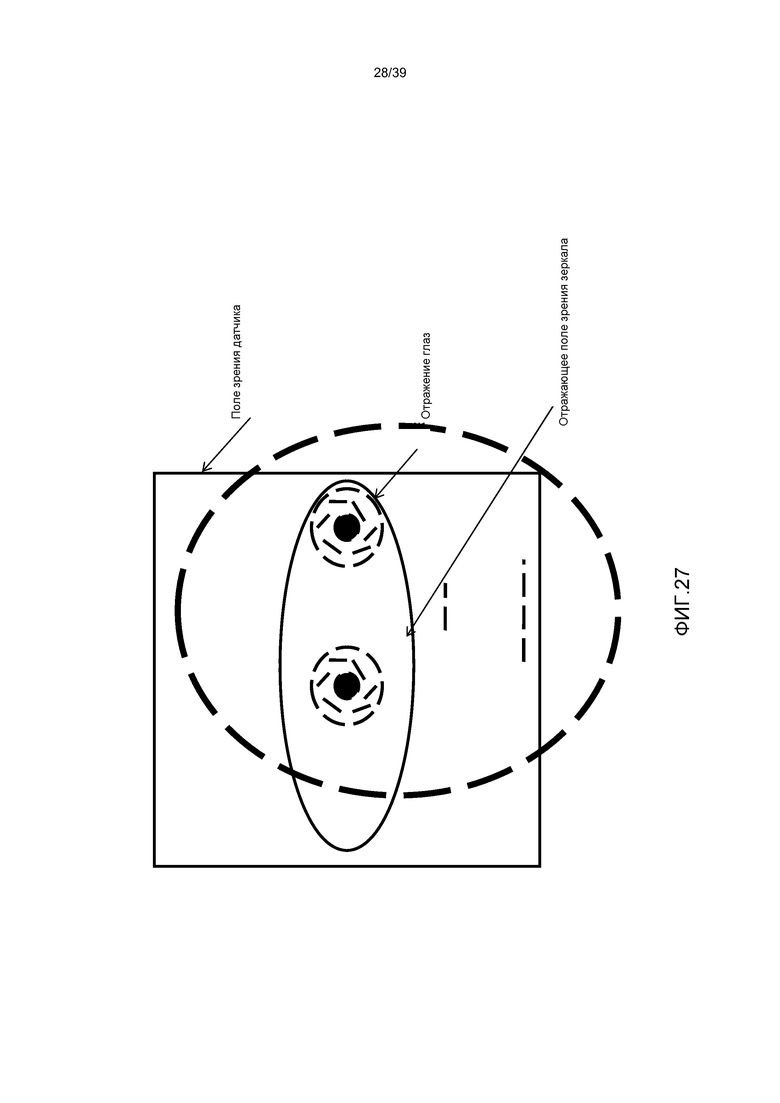
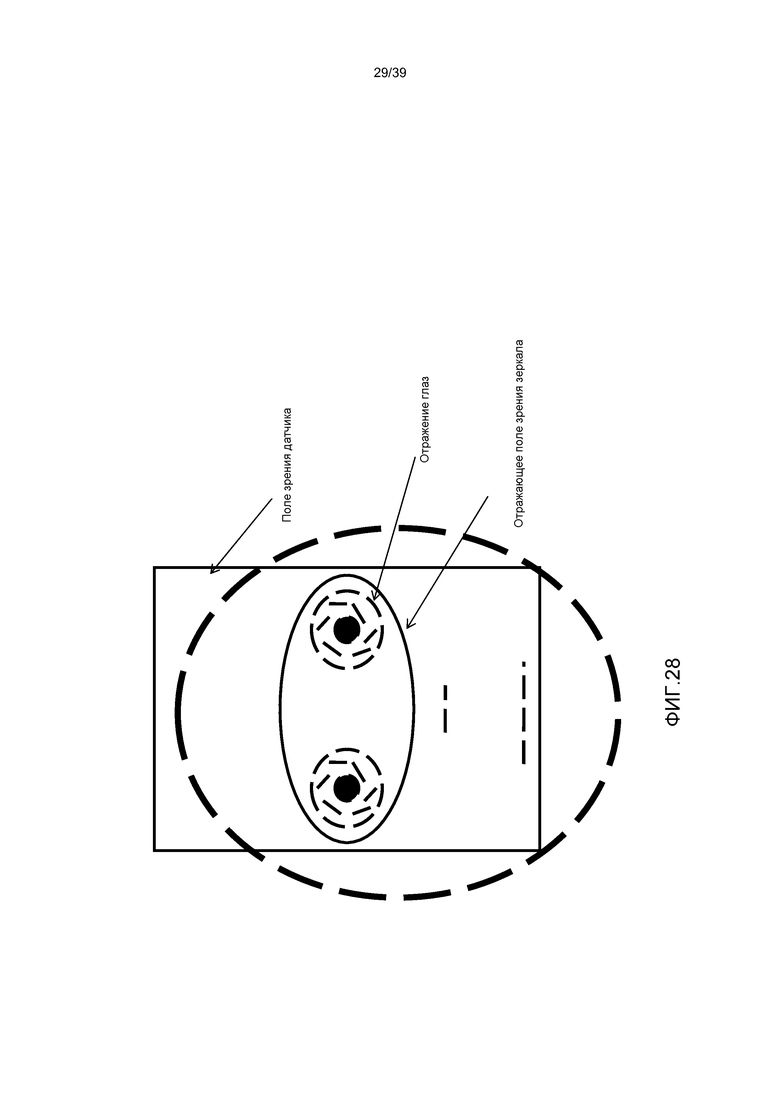
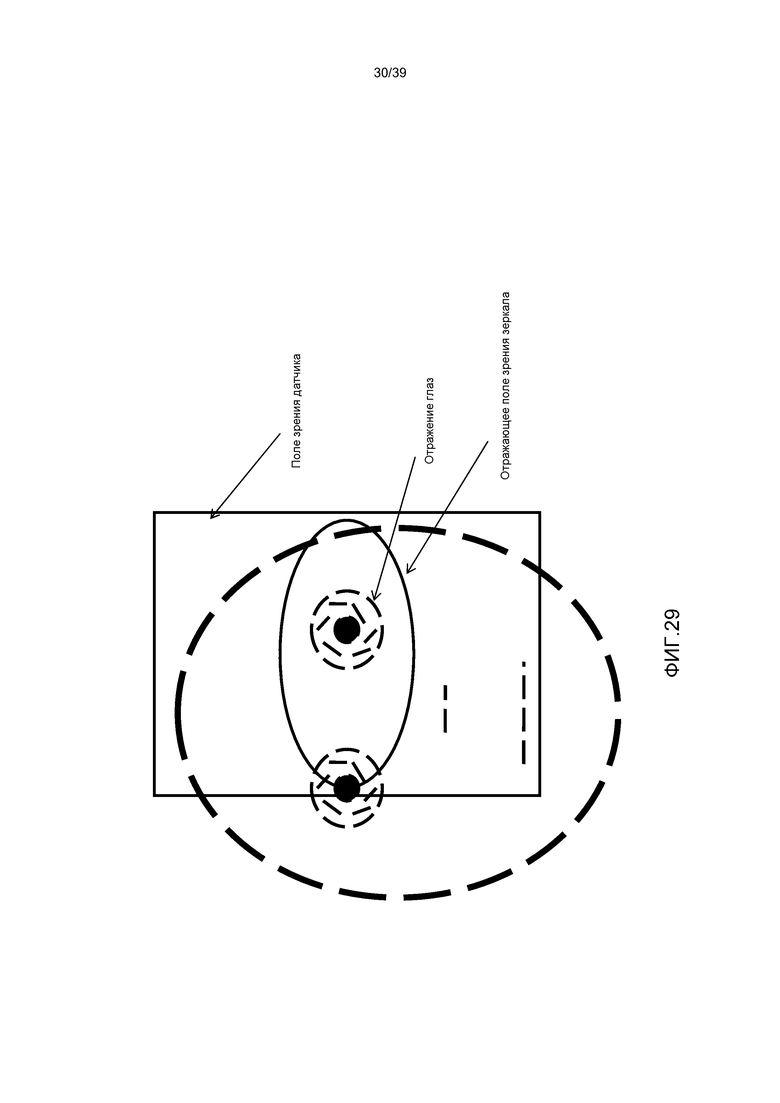
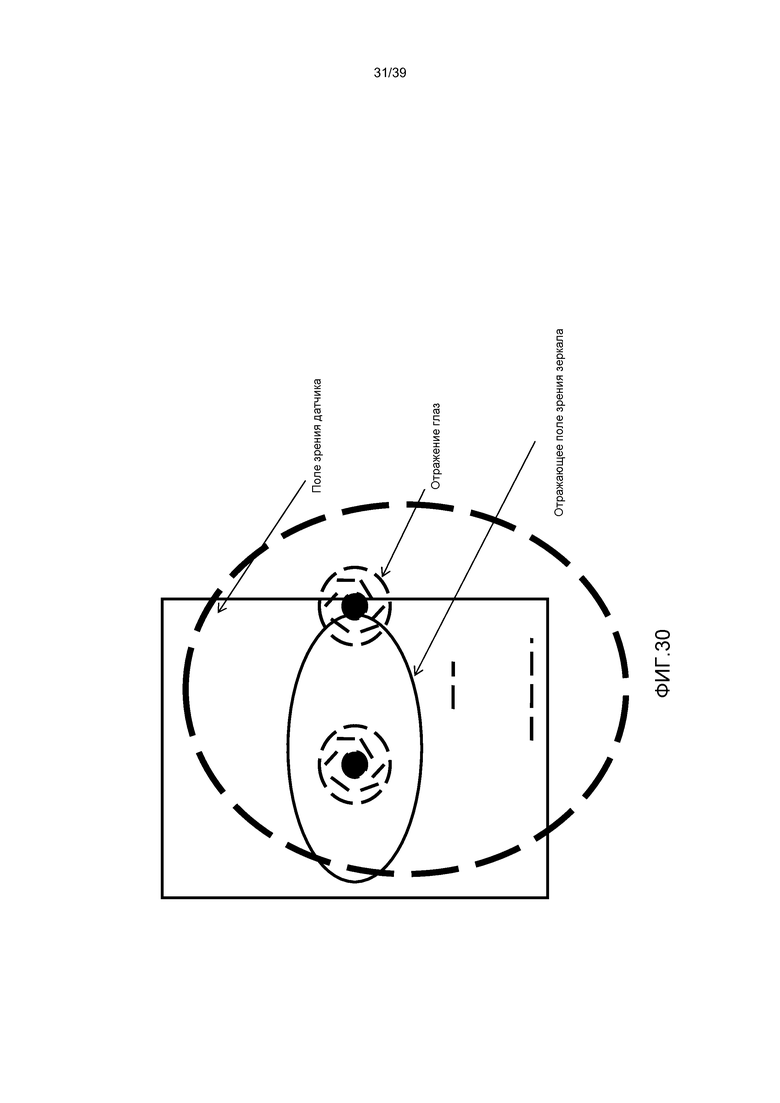
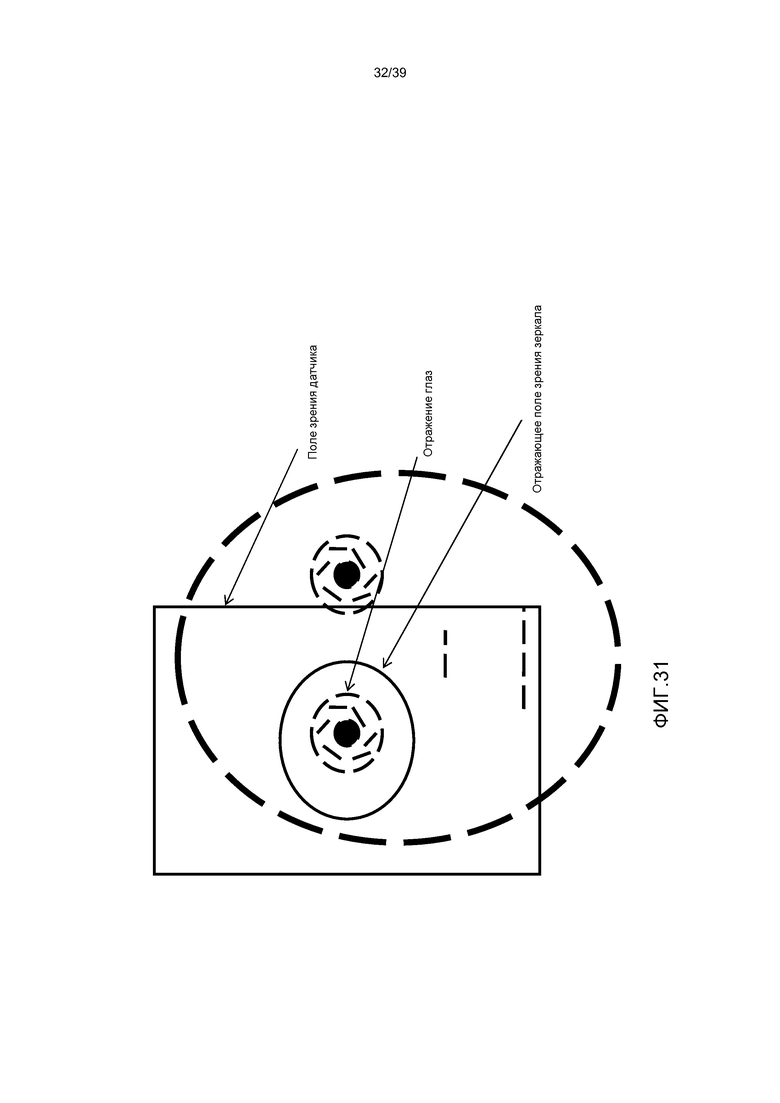
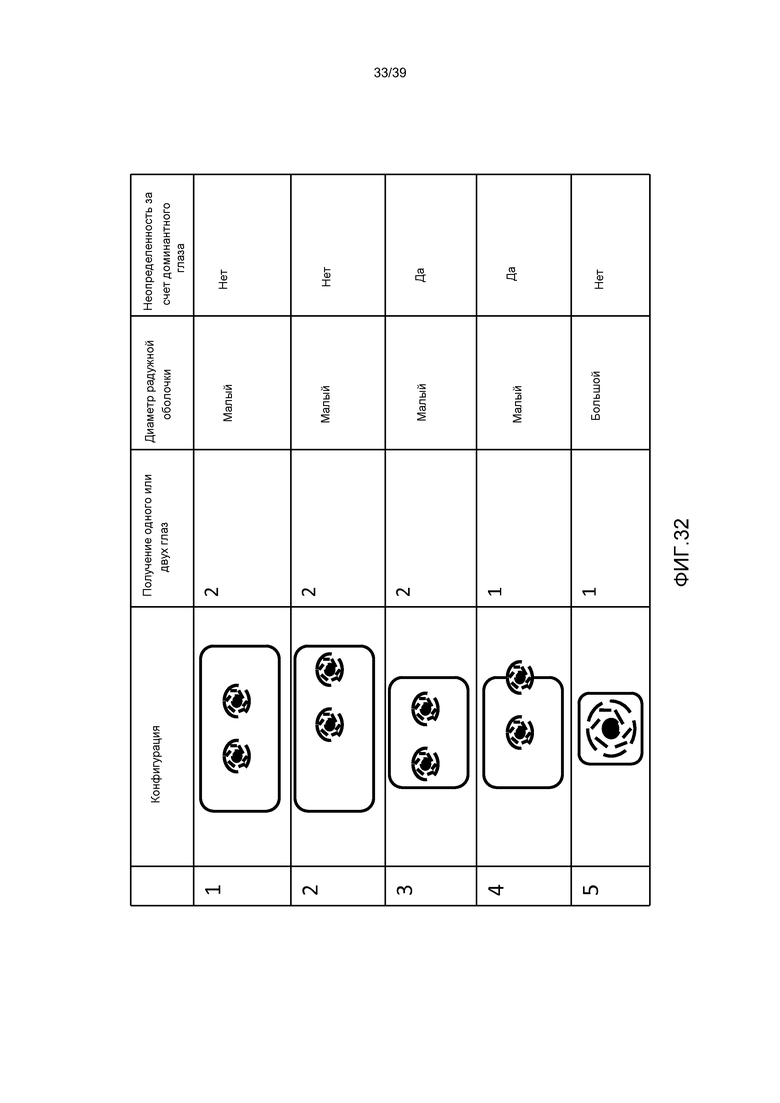
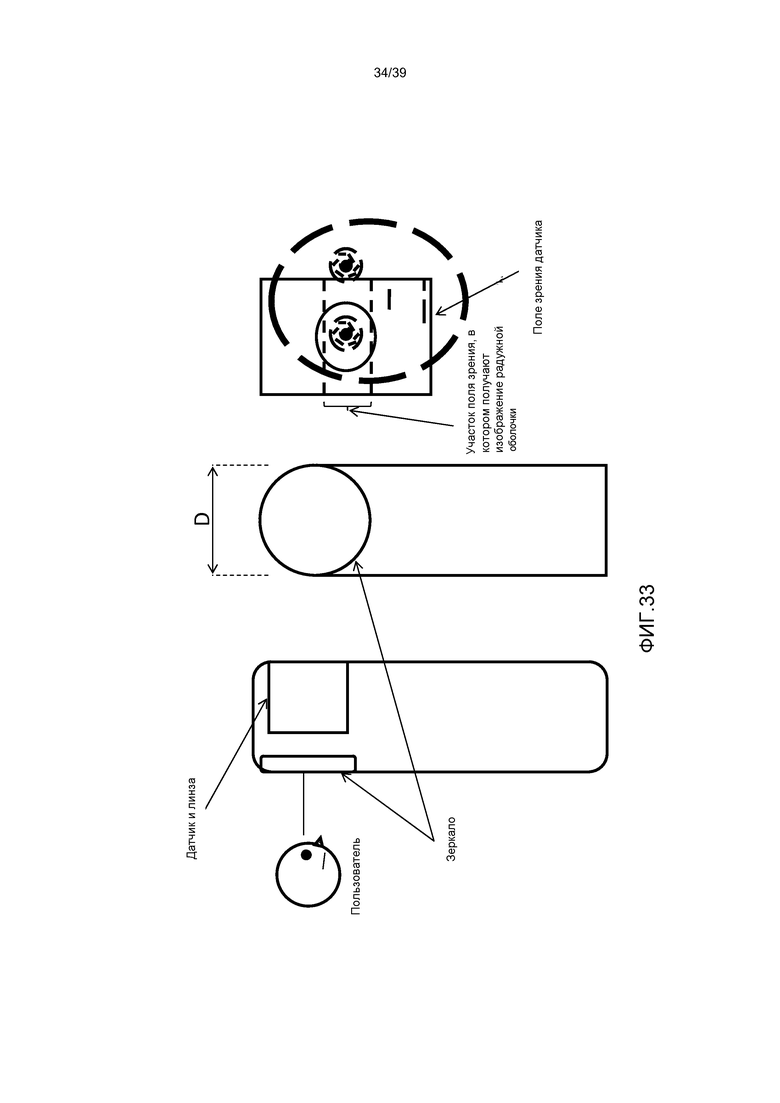

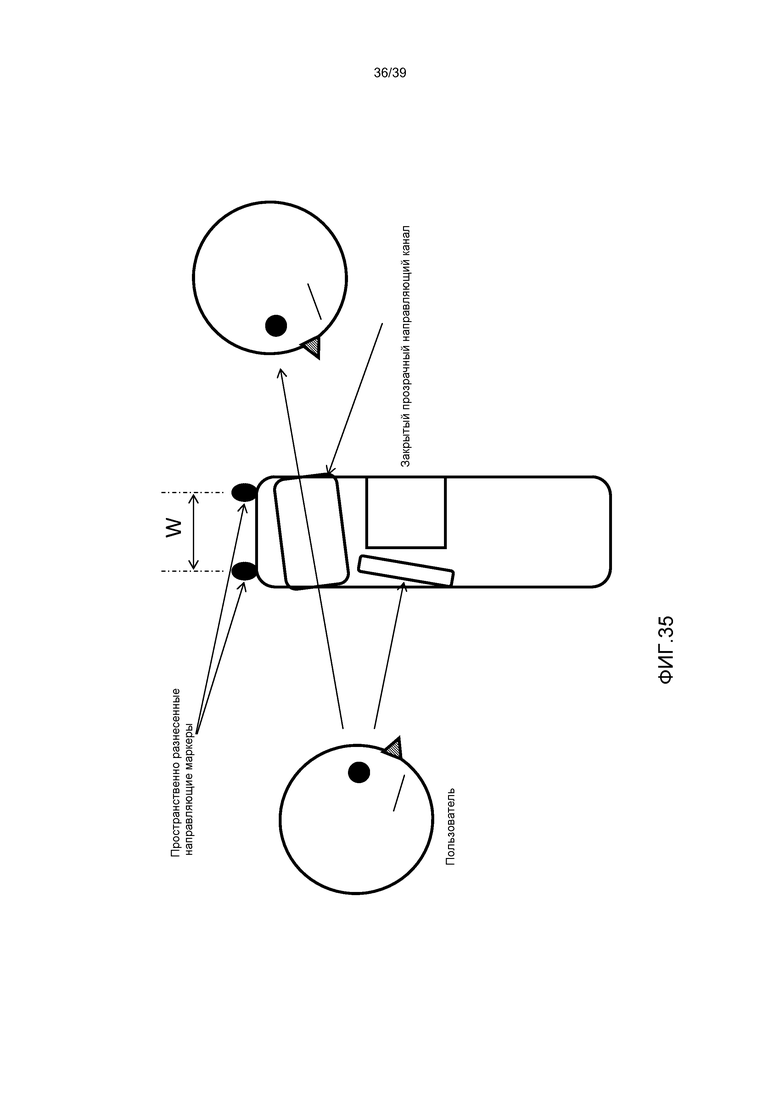
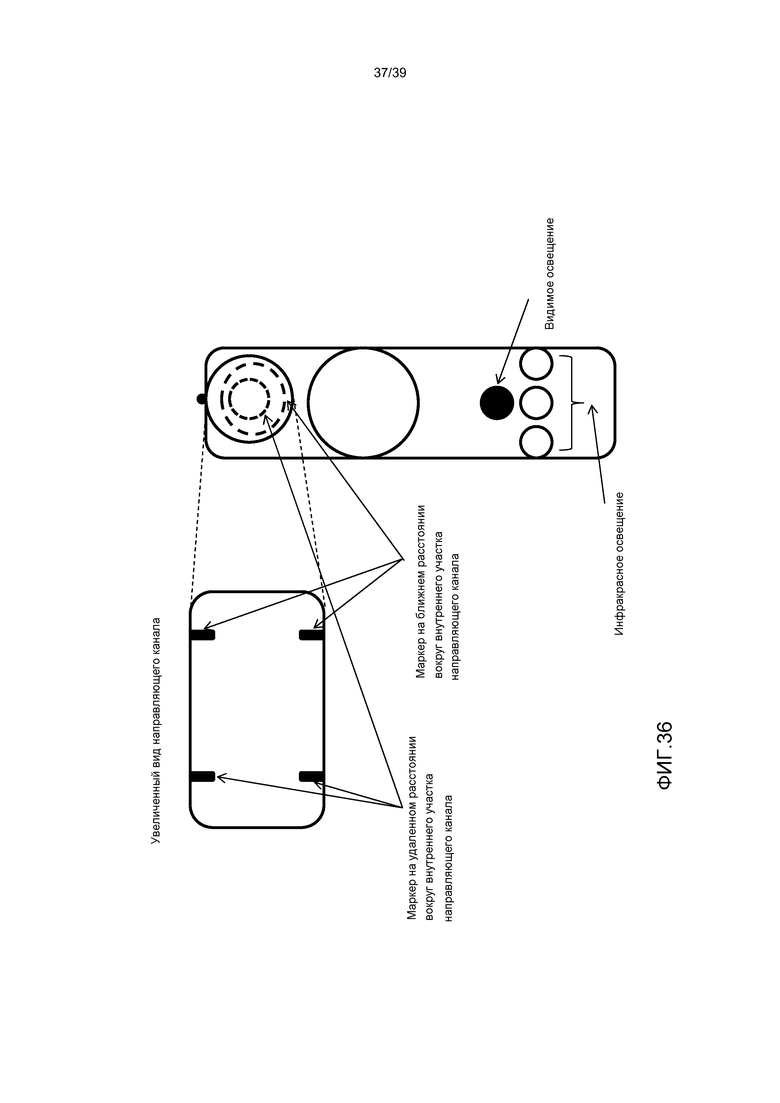
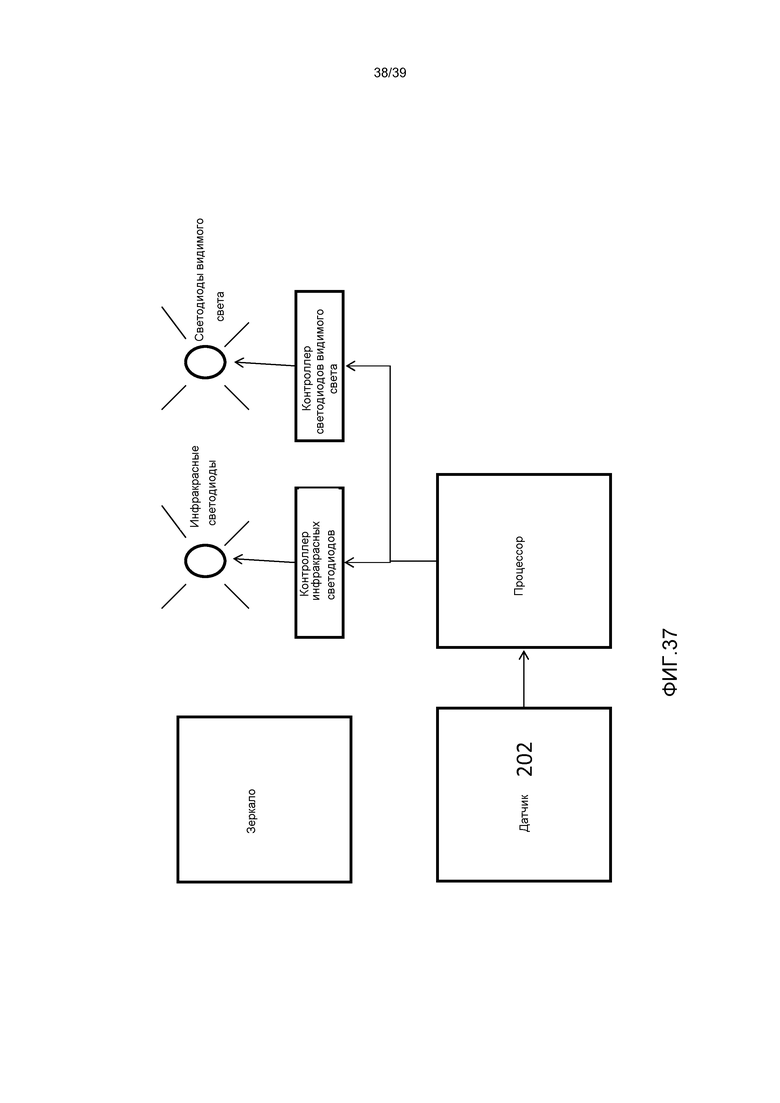
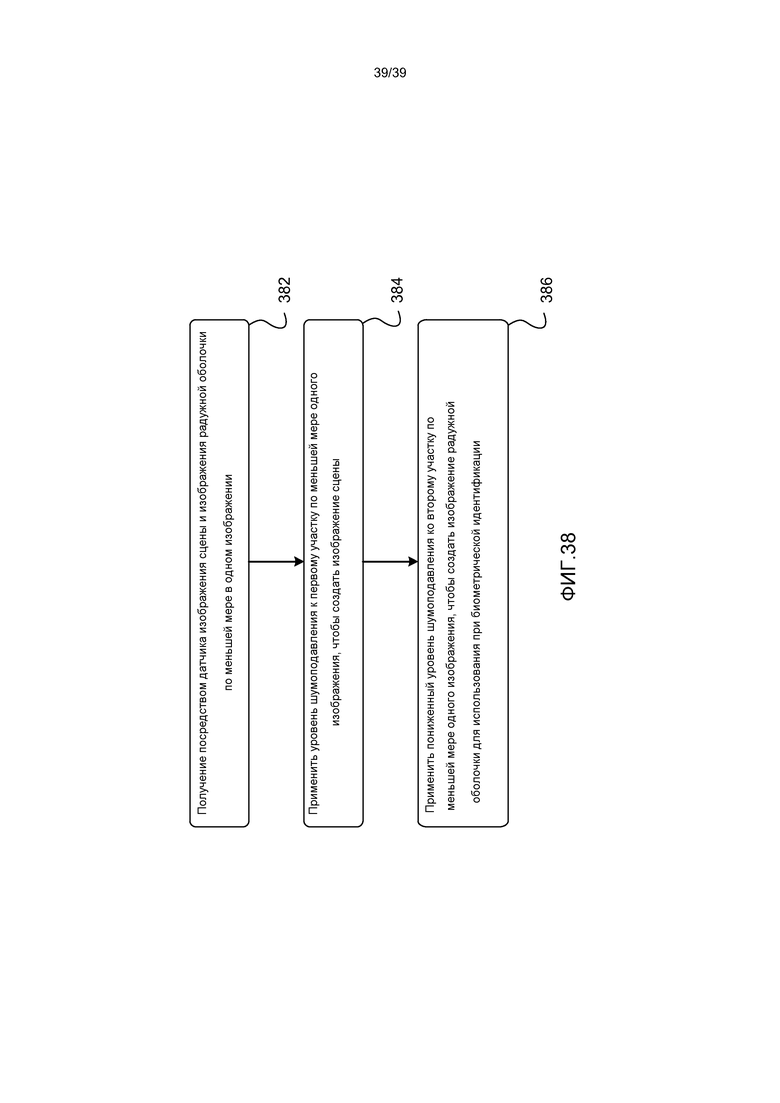
Изобретение относится к способам и системам для получения изображений радужной оболочки и сцены, используя один датчик изображения. Технический результат заключается в обеспечении получения нескольких компонентов распознавания лица. Датчик изображения может получить изображение сцены и изображение радужной оболочки по меньшей мере в одном изображении. Модуль обработки изображений может применить уровень шумоподавления к первому участку по меньшей мере одного изображения для создания изображения сцены. Модуль обработки изображений может применить пониженный уровень шумоподавления ко второму участку по меньшей мере одного изображения для создания изображения радужной оболочки для использования при биометрической идентификации. 2 н. и 18 з.п. ф-лы, 41 ил.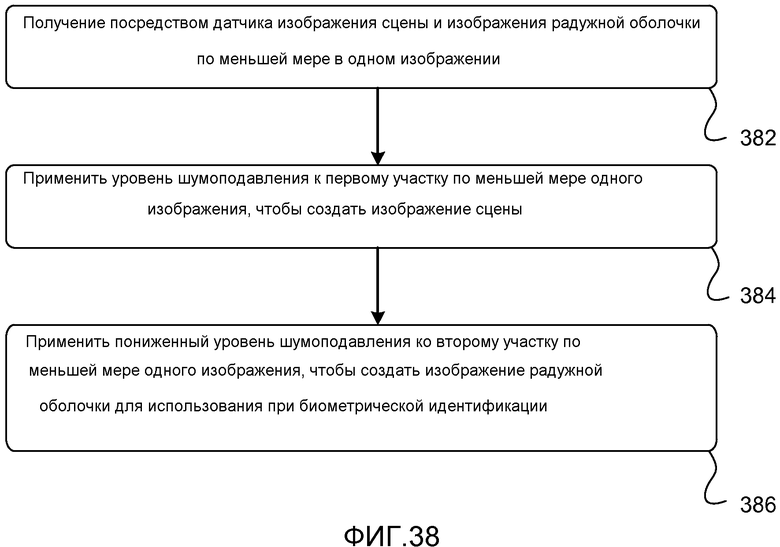
1. Способ получения изображений радужной оболочки и сцены с использованием одного датчика изображения, содержащий этапы, на которых:
получают посредством датчика изображения изображение сцены и изображение радужной оболочки по меньшей мере на одном изображении;
применяют уровень шумоподавления к первому участку по меньшей мере одного изображения для создания изображения сцены; и
применяют пониженный уровень шумоподавления ко второму участку по меньшей мере одного изображения для получения изображения радужной оболочки для использования при биометрической идентификации.
2. Способ по п.1, в котором получение изображения сцены и изображения радужной оболочки по меньшей мере в одном изображении содержит этап, на котором получают изображение сцены и изображение радужной оболочки как разделяемых компонентов в пределах одного изображения.
3. Способ по п.1, дополнительно содержащий этап, на котором получают по меньшей мере одно изображение радужной оболочки при освещении радужной оболочки инфракрасным освещением.
4. Способ по п.1, в котором применение шумоподавления содержит этап, на котором применяют усреднение или медианную функцию.
5. Способ по п.1, в котором применение шумоподавления содержит этап, на котором подавляют в полученном изображении как зависимый от времени, так и независимый от времени шум.
6. Способ по п.1, дополнительно содержащий этап, на котором вычитают шум, полученный из одного изображения радужной оболочки, из шума, полученного из другого изображения радужной оболочки.
7. Способ по п.1, дополнительно содержащий этап, на котором подавляют окружающий шум в одном изображении, используя окружающий шум, полученный из другого изображения.
8. Способ по п.1, дополнительно содержащий этап, на котором подавляют окружающий шум, полученный из одного изображения в присутствии инфракрасного освещения, используя окружающий шум, полученный из другого изображения без инфракрасного освещения.
9. Способ по п.1, дополнительно содержащий этап, на котором регулируют усиление или яркость на втором участке по меньшей мере одного изображения для создания изображения радужной оболочки для использования при биометрической идентификации.
10. Способ по п.1, в котором получение по меньшей мере одного изображения содержит этап, на котором приводят в действие множество узлов датчика в датчике изображения, причем первый поднабор узлов датчика выполнен главным образом с возможностью получения изображения радужной оболочки, пригодного для биометрической идентификации, второй поднабор узлов датчика выполнен главным образом с возможностью получения изображения, не являющегося изображением радужной оболочки.
11. Устройство для получения изображения радужной оболочки и сцены с использованием одного датчика изображения, содержащее:
датчик изображения для получения изображения сцены и изображения радужной оболочки по меньшей мере в одном изображении; и
модуль обработки изображений для применения уровня шумоподавления к первому участку по меньшей мере одного изображения для создания изображения сцены и применения пониженного уровня шумоподавления ко второму участку по меньшей мере одного изображения, чтобы создать изображение радужной оболочки для использования при биометрической идентификации.
12. Устройство по п.11, в котором датчик изображения получает изображение сцены и изображение радужной оболочки как разделяемых компонентов в пределах одного изображения.
13. Устройство по п.11, дополнительно содержащее светильник для освещения радужной оболочки инфракрасным освещением, при этом датчик изображения получает по меньшей мере одно изображение освещенной радужной оболочки.
14. Устройство по п.11, в котором шумоподавление содержит применение усреднения или медианной функции к полученному изображению.
15. Устройство по п.11, в котором шумоподавление содержит подавление в полученном изображении как зависимого от времени, так и независимого от времени шума.
16. Устройство по п.11, в котором модуль обработки изображений вычитает шум, полученный из одного изображения радужной оболочки, из шума, полученного из другого изображения радужной оболочки.
17. Устройство по п.11, в котором датчик изображения содержит датчик на основе комплементарной структуры «металл-оксид-проводник» (CMOS).
18. Устройство по п.11, в котором модуль обработки изображений подавляет окружающий шум, полученный из одного изображения в присутствии инфракрасного освещения, используя окружающий шум, полученный из другого изображения без инфракрасного освещения.
19. Устройство по п.11, в котором модуль обработки изображений выполняет регулирование усиления или яркости на втором участке по меньшей мере одного изображения для создания изображения радужной оболочки для использования при биометрической идентификации.
20. Устройство по п.11, в котором датчик изображения содержит множество узлов датчика, причем первый поднабор узлов датчика выполнен главным образом с возможностью получения изображения радужной оболочки, пригодного для биометрической идентификации, при этом второй поднабор узлов датчика выполнен главным образом для получения изображения, отличного от радужной оболочки.
| Литниковое устройство для плавного заполнения формы | 1953 |
|
SU97839A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ РАДУЖНОЙ ОБОЛОЧКИ ГЛАЗА | 2006 |
|
RU2318438C1 |
| СПОСОБ ОПОЗНАВАНИЯ ПО РАДУЖНОЙ ОБОЛОЧКЕ ГЛАЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2331107C2 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

