СВЯЗАННАЯ ЗАЯВКА
По настоящей заявке испрашивается приоритет согласно предварительной патентной заявке США № 61/525,984, озаглавленной "Capturing Specular Free Images" ("Захват изображений без отражений"), поданной 22 августа 2011 г., полное содержание которой включено в настоящий документ посредством ссылки во всех отношениях.
ОБЛАСТЬ ТЕХНИКИ
Настоящее раскрытие относится к технологиям проверки идентичности и, в частности, к системам и способам для захвата безартефактных изображений.
УРОВЕНЬ ТЕХНИКИ
Способы биометрического распознавания широко распространены и представляют большой интерес в областях безопасности, охраны, подтверждения финансовых операций, аэропортов и офисных зданий. Радужная оболочка, в частности, является лидирующим способом выполнения биометрического распознавания, хотя могут использоваться другие биометрические характеристики, такие как характеристики сетчатки. Сложность захвата биометрических характеристик глаза человека состоит в том, что признаки, которые являются биометрической зоной, представляющей интерес, такие как радужная оболочка, могут быть затемнены или искажены частями очковой оптики, такими как оправа очков и/или нарушения непрерывности линз очковой оптики. Кроме того, зеркальные отражения, возникающие из-за осветительных средств, таких как предназначенные для освещения глаза для биометрического захвата, могут отражаться от солнцезащитного щитка или линз очков и затемнять или искажать захватываемые изображения. Такие осветительные средства, установленные относительно биометрического датчика, иногда могут оказываться в неоптимальной позиции ввиду наклона головы объекта и, как следствие, положения очковой оптики.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В некоторых аспектах настоящее раскрытие направлено на системы и способы для захвата безартефактных изображений внутри области, представляющей интерес, на глазу объекта, в частности, когда глаз перемещается относительно устройства получения биометрических характеристик. Путем использования различных конфигураций одного или нескольких датчиков и/или одного или нескольких осветительных средств вероятность получения изображений области глаза или ее частей, которые не подвержены влиянию артефактов, может быть увеличена или максимизирована. В то же время эти конфигурации могут уменьшать или минимизировать физический размер или занимаемую площадь соответствующего устройства получения биометрических характеристик, включая максимальные горизонтальные и/или вертикальные размеры устройства получения биометрических характеристик.
В одном аспекте настоящее раскрытие направлено на способ получения безартефактных биометрических изображений глаза в движении относительно датчика и при наличии частично отражающей очковой оптики. Способ может включать в себя получение, посредством первого датчика, первого изображения глаза, в то время как глаз освещен первым осветительным средством. Первое изображение может включать в себя область, представляющую интерес. Первый датчик может быть расположен на фиксированном смещении от первого осветительного средства и второго датчика. Второй датчик может получать, за предварительно определенный период времени от получения первого изображения, второе изображение глаза. Второе изображение может включать в себя область, представляющую интерес. Процессор изображений может определять, включает ли в себя по меньшей мере одно из первого и второго изображений артефакты, возникающие от одного или обоих из первого осветительного средства и очковой оптики, внутри области, представляющей интерес.
В некоторых вариантах осуществления первый датчик получает первое изображение глаза во время освещения первым осветительным средством. Первый датчик может быть смещен по вертикали относительно второго датчика. Второй датчик может получать, одновременно с получением первого изображения, второе изображение глаза, причем второе изображение включает в себя область, представляющую интерес. Первый датчик может получать третье изображение глаза во время освещения вторым осветительным средством. Второе осветительное средство может быть расположено на предварительно определенном расстоянии от первого осветительного средства. Первый датчик может получать, за предварительно определенное время от получения первого изображения, третье изображение глаза во время освещения вторым осветительным средством, причем второе осветительное средство расположено на расстоянии по вертикали от первого осветительного средства. Второй датчик может получать четвертое изображение глаза во время освещения вторым осветительным средством.
В конкретных вариантах осуществления расположение первого и второго датчиков на биометрическом устройстве может быть таким, чтобы оптические оси первого и второго датчиков сходились на по существу номинальном расстоянии D между глазом и датчиками. Биометрическое устройство может наклонять первый и второй датчик на угол тета относительно линии, соединяющей глаз и срединную точку между первым и вторым датчиками, согласно тета = arctg(0,5*S/D), где S - расстояние разноса между первым и вторым датчиками, а D - расстояние от глаза до срединной точки между первым и вторым датчиками.
В некоторых вариантах осуществления процессор изображений может выбирать, на основе определения, по меньшей мере часть области, представляющей интерес, с одного или обоих из первого и второго изображений для использования в биометрической верификации. Процессор изображений может комбинировать выбранную упомянутую по меньшей мере часть области, представляющей интерес, для биометрической верификации. Процессор изображений может определять, включает ли в себя по меньшей мере одно из первого и второго изображений зеркальное отражение от очковой оптики внутри области, представляющей интерес, причем зеркальное отражение возникает от первого осветительного средства. Процессор изображений может определять, включает ли в себя по меньшей мере одно из первого и второго изображений по меньшей мере одно из: препятствия от нелинзовой части очковой оптики, нарушения непрерывности в линзе очковой оптики и искажения от края линзы.
В другом аспекте настоящее раскрытие направлено на систему получения безартефактных биометрических изображений глаза в движении и при наличии частично отражающей очковой оптики. Система может включать в себя первое осветительное средство. Система может включать в себя первый датчик и второй датчик. Первый датчик может получать первое изображение глаза во время освещения первым осветительным средством. Первое изображение может включать в себя область, представляющую интерес. Первый датчик может быть расположен на фиксированном смещении от первого осветительного средства и второго датчика. Второй датчик может получать второе изображение глаза за предварительно определенный период времени от получения первого изображения, причем второе изображение включает в себя область, представляющую интерес. Процессор изображений может определять, включает ли в себя по меньшей мере одно из первого и второго изображений артефакты, возникающие от одного или обоих из первого осветительного средства и очковой оптики, внутри области, представляющей интерес.
В некоторых вариантах осуществления первый датчик может быть смещен по вертикали относительно второго датчика. Второй датчик может получать, одновременно с получением первого изображения, второе изображение глаза. Первый датчик может получать третье изображение глаза во время освещения вторым осветительным средством, причем второе осветительное средство расположено на предварительно определенном расстоянии от первого осветительного средства. Система может включать в себя второе осветительное средство. Первый датчик может получать, за предварительно определенное время от получения первого изображения, третье изображение глаза во время освещения вторым осветительным средством. Второе осветительное средство может быть расположено на расстоянии по вертикали от первого осветительного средства. Второй датчик получает четвертое изображение глаза во время освещения вторым осветительным средством.
В конкретных вариантах осуществления первый и второй датчики могут быть расположены так, чтобы оптические оси первого и второго датчиков сходились на по существу номинальном расстоянии D между глазом и датчиками. Первый и второй датчики могут быть расположены так, чтобы оптические оси первого и второго датчиков были наклонены на угол тета относительно линии, соединяющей глаз и срединную точку между первым и вторым датчиками, согласно тета =arctg(0,5*S/D), где S - расстояние разноса между первым и вторым датчиками, а D - расстояние от глаза до срединной точки между первым и вторым датчиками.
В некоторых вариантах осуществления процессор изображений выбирает, на основе определения, по меньшей мере часть области, представляющей интерес, с одного или обоих из первого и второго изображений для использования в биометрической верификации. Процессор изображений может комбинировать выбранную упомянутую по меньшей мере часть области, представляющей интерес, для биометрической верификации. Процессор изображений может определять, включает ли в себя по меньшей мере одно из первого и второго изображений зеркальное отражение от очковой оптики внутри области, представляющей интерес, причем зеркальное отражение возникает от первого осветительного средства. Процессор изображений может определять, включает ли в себя по меньшей мере одно из первого и второго изображений по меньшей мере одно из: препятствия от нелинзовой части очковой оптики, нарушения непрерывности в линзе очковой оптики и искажения от края линзы.
В еще одном аспекте настоящее раскрытие направлено на способ получения безартефактных биометрических изображений глаза в движении и при наличии частично отражающей очковой оптики. Способ может включать в себя получение, посредством первого датчика, первого изображения глаза, в то время как глаз находится в первой позиции по отношению к датчику и освещен первым осветительным средством. Первое изображение может включать в себя область, представляющую интерес. Первый датчик может быть расположен на фиксированном смещении от первого осветительного средства. Первый датчик может получать, за предварительно определенное время от получения первого изображения, второе изображение глаза, в то время как глаз находится во второй позиции и освещен первым осветительным средством. Второе изображение может включать в себя область, представляющую интерес. Процессор изображений может определять, включает ли в себя по меньшей мере одно из первого и второго изображений артефакты, возникающие от одного или обоих из первого осветительного средства и очковой оптики, внутри области, представляющей интерес. Процессор изображений может выбирать, на основе определения, по меньшей мере часть области, представляющей интерес, с одного или обоих из первого и второго изображений для использования в биометрической верификации.
В некоторых вариантах осуществления второй датчик получает третье изображение глаза во время освещения первым осветительным средством. Второй датчик может быть смещен по вертикали относительно первого датчика. Второй датчик может получать, за предварительно определенное время от получения третьего изображения, четвертое изображение глаза во время освещения первым осветительным средством. Первый датчик может получать третье изображение глаза во время освещения вторым осветительным средством. Второе осветительное средство может быть расположено на предварительно определенном расстоянии от первого осветительного средства. Первый датчик может получать, за предварительно определенное время от получения первого изображения, третье изображение глаза во время освещения вторым осветительным средством. Второе осветительное средство может быть расположено на расстоянии по вертикали от первого осветительного средства.
В конкретных вариантах осуществления процессор изображений может выбирать, на основе определения, по меньшей мере часть области, представляющей интерес, с одного или обоих из первого и второго изображений для использования в биометрической верификации. Процессор изображений может комбинировать выбранную упомянутую по меньшей мере часть области, представляющей интерес, для биометрической верификации. Процессор изображений может определять, включает ли в себя по меньшей мере одно из первого и второго изображений зеркальное отражение от очковой оптики внутри области, представляющей интерес, причем зеркальное отражение возникает от первого осветительного средства. Процессор изображений может определять, включает ли в себя по меньшей мере одно из первого и второго изображений по меньшей мере одно из: препятствия от нелинзовой части очковой оптики, нарушения непрерывности в линзе очковой оптики и искажения от края линзы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Последующие чертежи изображают конкретные иллюстративные варианты осуществления способов и систем, описанных здесь, причем подобные ссылочные позиции указывают подобные элементы. Каждый изображенный вариант осуществления является иллюстрацией этих способов и систем и не является ограничивающим.
Фиг. 1A изображает структурную схему, иллюстрирующую вариант осуществления сетевой среды с клиентской машиной, которая связывается с сервером;
фиг. 1B и 1C изображают структурные схемы, иллюстрирующие варианты осуществления вычислительных машин для применения на практике способов и систем, описанных здесь;
фиг. 2 изображает один вариант осуществления системы, в котором камера (или точка наблюдения) располагается между двумя по существу горизонтальными осветительными средствами;
фиг. 3A изображает один вариант осуществления фронтального вида пользователя с очковой оптикой;
фиг. 3B изображает один вариант осуществления зеркальных отражений от очковой оптики, затемняющих радужную оболочку на полученных изображениях;
фиг. 4 изображает один вариант осуществления системы, содержащей две точки наблюдения в по существу различных вертикальных позициях и два осветительных средства в по существу различных горизонтальных и вертикальных позициях;
фиг. 5 изображает один вариант осуществления зеркальных отражений над радужной оболочкой на изображениях, полученных из верхней точки наблюдения;
фиг. 6 изображает примерный вариант осуществления вида из нижней точки наблюдения с включенным верхним левым осветительным средством;
фиг. 7 изображает один вариант осуществления зеркальных отражений, затемняющих радужную оболочку на изображениях, полученных из верхней точки наблюдения;
фиг. 8 изображает один вариант осуществления зеркальных отражений ниже радужной оболочки на изображениях, полученных из нижней точки наблюдения;
фиг. 9 изображает один вариант осуществления системы, поддерживающий одну точку наблюдения и два осветительных средства, расположенных вертикально относительно точки наблюдения;
фиг. 10 изображает один вариант осуществления системы, содержащей одно осветительное средство и две точки наблюдения, расположенных пространственно относительно осветительного средства;
фиг. 11 изображает один вариант осуществления системы, содержащей одно осветительное средство и две точки наблюдения, расположенных пространственно относительно осветительного средства;
фиг. 12 изображает один вариант осуществления системы, содержащей два осветительных средства и две точки наблюдения, расположенных пространственно относительно первого осветительного средства;
фиг. 13 изображает один вариант осуществления системы, содержащей две камеры и множество раздельных осветительных средств, все из которых находятся в различных вертикальных и горизонтальных позициях;
фиг. 14 изображает один вариант осуществления направления наклона камер в системе, поддерживающей две камеры в различных вертикальных положениях;
фиг. 15 изображает один вариант осуществления направления наклона точек фотографирования в системе, поддерживающей две точки наблюдения в различных горизонтальных положениях;
фиг. 16 изображает один вариант осуществления установки системы, в которой изображения получаются из верхней позиции камеры;
фиг. 17 изображает один вариант осуществления установки системы, в котором изображения получаются из нижней позиции камеры;
фиг. 18 изображает один вариант осуществления бокового вида установки получения изображений;
фиг. 19 изображает один вариант осуществления изображений, захваченных из верхней точки наблюдения и из нижней точки наблюдения;
фиг. 20 изображает один вариант осуществления изображений, полученных с использованием системы с вертикальным разнесением камер;
фиг. 21 изображает один вариант осуществления условий получения изображений, когда пользователь находится дальше от устройства получения биометрических характеристик;
фиг. 22 изображает один вариант осуществления условий получения изображений, когда пользователь находится ближе к устройству получения биометрических характеристик;
фиг. 23 изображает вариант осуществления системы с камерой и осветительным средством и вид сверху пользователя, перемещающегося по направлению к камерам;
фиг. 24 изображает вариант осуществления системы с камерой и осветительным средством и боковой вид приближающегося пользователя;
фиг. 25 изображает конфигурацию, в которой изображения могут быть захвачены из множества горизонтальных и вертикальных точек фотографирования или при множестве позиций пользователя или направлений взгляда;
фиг. 26 и 27 изображают варианты осуществления обработки, которая может выполняться над множеством изображений, полученных при различных позициях камеры, условиях освещения, позициях пользователя и/или позициях взгляда; и
Фиг. 28 изображает один вариант осуществления этапов способа для захвата безартефактных изображений.
ПОДРОБНОЕ ОПИСАНИЕ
Прежде чем рассматривать другие аспекты систем и способов для захвата или создания безартефактных изображений, может быть полезно описание системных компонентов и признаков, подходящих для использования в настоящих системах и способах. Некоторые из этих системных компонентов и признаков могут быть включены в биометрические устройства или системы, такие как модули получения изображений и/или обработки. Фиг. 1A изображает один вариант осуществления вычислительной среды 101, которая включает в себя одну или несколько клиентских машин 102A-102N (в общем называемых здесь "клиентской машиной(-ами) 102"), состоящих в связи с одним или несколькими серверами 106A-106N (в общем называемых здесь "сервером(-ами) 106"). Между клиентской машиной(-ами) 102 и сервером(-ами) 106 установлена сеть.
В одном варианте осуществления вычислительная среда 101 может включать в себя устройство или прибор, установленный между сервером(-ами) 106 и клиентской машиной(-ами) 102. Этот прибор может управлять клиент-серверными соединениями и в некоторых случаях может осуществлять выравнивание нагрузок клиентских соединений среди множества внутренних серверов. Клиентская машина(-ы) 102 может в некоторых вариантах осуществления называться одной клиентской машиной 102 или одной группой клиентских машин 102, в то время как сервер(ы) 106 может называться одним сервером 106 или одной группой серверов 106. В одном варианте осуществления одна клиентская машина 102 связывается с более чем одним сервером 106, в то время как в другом варианте осуществления один сервер 106 связывается с более чем одной клиентской машиной 102. В еще одном варианте осуществления одна клиентская машина 102 связывается с одним сервером 106.
Клиентская машина 102 в некоторых вариантах осуществления может обозначаться любым из следующих терминов: клиентская машина(-ы) 102; клиент(ы); клиентский компьютер(ы); клиентское устройство(-а); клиентское вычислительное устройство(-а); локальная машина; удаленная машина; клиентский узел (узлы); конечная точка(-и); конечный узел (узлы); или вторая машина. Сервер 106 в некоторых вариантах осуществления может обозначаться любым из следующих терминов: сервер(ы), локальная машина; удаленная машина; серверная ферма(-ы), ведущее вычислительное устройство(-а) или первая машина(-ы).
Клиентская машина 102 может в некоторых вариантах осуществления исполнять, оперировать или другим образом обеспечивать приложение, которое может быть любым из следующего: программных средств; программы; исполняемых инструкций; виртуальной машины; гипервизора; веб-обозревателя; сетевого клиента; клиент-серверного приложения; вычислительного клиента тонкого клиента; средства управления ActiveX; Java-приложения; программных средств, относящихся к связи на основе передачи голоса по Интернет-протоколу (VoIP), таких как программный IP-телефон; приложения для передачи потоков видео и/или аудио; приложения для обеспечения связи на основе данных в реальном времени; HTTP-клиента; FTP-клиента; OSCAR-клиента; TELNET-клиента; или любого другого набора исполняемых инструкций. Дополнительные другие варианты осуществления включают в себя клиентское устройство 102, которое отображает выходные данные приложения, генерируемые приложением, удаленно исполняющимся на сервере 106 или другой удаленно расположенной машине. В этих вариантах осуществления клиентское устройство 102 может отображать выходные данные приложения в окне приложения, обозревателе или другом окне выходных данных. В одном варианте осуществления, приложение является настольным, в то время как в других вариантах осуществления приложение является приложением, которое генерирует рабочий стол.
Вычислительная среда 101 может включать в себя более одного сервера 106A-106N так, чтобы серверы 106A-106N логически группировались в серверную ферму 106. Серверная ферма 106 может включать в себя серверы 106, которые географически рассеяны и логически сгруппированы вместе в серверной ферме 106, или серверы 106, которые расположены вблизи друг друга и логически сгруппированы вместе в серверной ферме 106. Географически рассеянные серверы 106A-106N внутри серверной фермы 106 в некоторых вариантах осуществления могут осуществлять связь с использованием WAN, MAN или LAN, где различные географические области могут характеризоваться как: различные континенты; различные области континента; различные страны; различные штаты; различные города; различные территории учебных заведений; различные комнаты; или любая комбинация предыдущих географических местоположений. В некоторых вариантах осуществления серверной фермой 106 может осуществляться управление как единой сущностью, в то время как в других вариантах осуществления серверная ферма 106 может включать в себя множество серверных ферм 106.
В некоторых вариантах осуществления серверная ферма 106 может включать в себя серверы 106, которые исполняют по существу подобный тип платформы операционной системы (например, Windows NT, выпущенной Microsoft Corp. в Редмонде, штат Вашингтон, UNIX, Linux или Snow Leopard). В других вариантах осуществления серверная ферма 106 может включать в себя первую группу серверов 106, которые исполняют первый тип платформы операционной системы, и вторую группу серверов 106, которые исполняют второй тип платформы операционной системы. Серверная ферма 106 в других вариантах осуществления может включать в себя серверы 106, которые исполняют различные типы платформ операционных систем.
Сервер 106 в некоторых вариантах осуществления может быть сервером любого типа. В других вариантах осуществления сервер 106 может быть сервером любого из следующих типов: файловый сервер; сервер приложений; веб-сервер; сервер-посредник; прибор; сетевой прибор; шлюз; шлюз приложений; шлюзовый сервер; сервер виртуализации; сервер развертывания; SSL-VPN-сервер; брандмауэр; веб-сервер; сервер приложений или главный сервер приложений; сервер 106, исполняющий активную директорию; или сервер 106, исполняющий программу ускорения приложений, которая обеспечивает функциональные возможности брандмауэра, функциональные возможности приложения или функциональные возможности выравнивания нагрузки. В некоторых вариантах осуществления сервером 106 может быть RADIUS-сервер, который включает в себя пользовательскую услугу удаленной аутентификации по телефонной линии. Некоторые варианты осуществления включают в себя первый сервер 106A, который принимает запросы от клиентской машины 102, перенаправляет запрос к второму серверу 106B и отвечает на запрос, генерируемый клиентской машиной 102, посредством ответа от второго сервера 106B. Первый сервер 106A может получать перечень приложений, доступных клиентской машине 102, а также адресную информацию, ассоциированную с сервером 106 приложений, размещающим приложение, идентифицированное внутри перечня приложений. Первый сервер 106A может затем представлять ответ на запрос клиента посредством веб-интерфейса и осуществлять связь непосредственно с клиентом 102 для обеспечения клиента 102 доступом к идентифицированному приложению.
Клиентскими машинами 102 в некоторых вариантах осуществления могут быть клиентские узлы, которые требуют доступа к ресурсам, обеспеченным сервером 106. В других вариантах осуществления сервер 106 может обеспечивать клиентов 102 или клиентские узлы доступом к размещаемым ресурсам. Сервер 106 в некоторых вариантах осуществления функционирует как главный узел так, чтобы он связывался с одним или несколькими клиентами 102 или серверами 106. В некоторых вариантах осуществления главный узел может определять и обеспечивать адресную информацию, ассоциированную с сервером 106, размещающим запрошенное приложение, одному или нескольким клиентам 102 или серверам 106. В дополнительных других вариантах осуществления главным узлом может быть серверная ферма 106, клиент 102, совокупность клиентских узлов 102 или прибор.
Один или несколько клиентов 102 и/или один или несколько серверов 106 могут передавать данные через сеть 104, установленную между машинами и приборами внутри вычислительной среды 101. Сеть 104 может содержать одну или несколько подсетей и может быть установлена между любой комбинацией клиентов 102, серверов 106, вычислительных машин и приборов, включаемых в вычислительную среду 101. В некоторых вариантах осуществления сетью 104 может быть: локальная сеть (LAN); региональная сеть (MAN); широкомасштабная сеть (WAN); первичная сеть 104, состоящая из множества подсетей 104, находящихся между клиентскими машинами 102 и серверами 106; первичная общедоступная сеть 104 с частной подсетью 104; первичная частная сеть 104 с публичной подсетью 104; или первичная частная сеть 104 с частной подсетью 104. Другие дополнительные варианты осуществления включают в себя сеть 104, которая может быть сетью любого из следующих типов: сеть с двухточечным соединением; сеть широкого вещания; сеть дальней связи; сеть передачи данных; компьютерная сеть; сеть ATM (режима асинхронной передачи); сеть SONET (синхронной оптической сети); сеть SDH (синхронной цифровой иерархии); беспроводная сеть; проводная сеть; или сеть 104, которая включает в себя беспроводную линию связи, где беспроводной линией связи может быть инфракрасный канал или спутниковая полоса частот. Сетевая топология сети 104 может отличаться в различных вариантах осуществления, возможные сетевые топологии включают в себя: топологию магистральной сети; топологию звездоподобной сети; топологию кольцевой сети; топологию сети на основе регенератора сигналов; или топологию многоуровневой звездоподобной сети. Дополнительные варианты осуществления могут включать в себя сеть 104 сетей мобильных телефонов, которые используют протокол для осуществления связи между мобильными устройствами, где протокол может быть любым из следующих: AMPS; TDMA; CDMA; GSM; GPRS UMTS; 3G; 4G; или любым другим протоколом с возможностью передачи данных между мобильными устройствами.
На фиг. 1B иллюстрируется вариант осуществления вычислительного устройства 100, где клиентская машина 102 и сервер 106, иллюстрируемые на фиг.1A, могут применяться как и/или исполняться на любом варианте осуществления вычислительного устройства 100, иллюстрируемом и описываемом здесь. Вычислительное устройство 100 включает в себя системную шину 150, которая осуществляет связь со следующими компонентами: центральным обрабатывающим блоком 121; основной памятью 122; запоминающим средством 128; средством 123 управления вводом-выводом (I/O); устройствами 124A-124N отображения; устройством 116 установки; и сетевым интерфейсом 118. В одном варианте осуществления запоминающее средство 128 включает в себя: операционную систему, подпрограммы программных средств и клиентский агент 120. Средство 123 I/O-управления в некоторых вариантах осуществления дополнительно соединяется с клавиатурой 126 и указывающим устройством 127. Другие варианты осуществления могут включать в себя средство 123 I/O-управления, соединенное с более чем одним устройством 130A-130N ввода-вывода.
Фиг. 1C иллюстрирует один вариант осуществления вычислительного устройства 100, где клиентская машина 102 и сервер 106, иллюстрируемые на фиг. 1A, могут применяться в качестве и/или исполняться на любом варианте осуществления вычислительного устройства 100, иллюстрируемом и описываемом здесь. Вычислительное устройство 100 включает в себя системную шину 150, которая осуществляет связь со следующими компонентами: мост 170 и первое I/O-устройство 130A. В другом варианте осуществления мост 170 состоит в дополнительной связи с основным центральным обрабатывающим блоком 121, где центральный обрабатывающий блок 121 может дополнительно осуществлять связь с вторым I/O-устройством 130B, основной памятью 122 и кэш-памятью 140. Центральный обрабатывающий блок 121 включает в себя I/O-порты, порт 103 памяти и основной процессор.
Варианты осуществления вычислительной машины 100 могут включать в себя центральный обрабатывающий блок 121, характеризующийся любой из следующих компонентных конфигураций: логические цепи, которые реагируют на и обрабатывают инструкции, извлеченные из основного блока 122 памяти; микропроцессорный блок, такой как: изготовленные Intel Corporation; изготовленные Motorola Corporation; изготовленные Transmeta Corporation в Санта-Кларе, штат Калифорния; RS/6000-процессор, такой как изготовленные International Business Machines; процессор, такой как изготовленные Advanced Micro Devices; или любая другая комбинация логических цепей. Дополнительные другие варианты осуществления центрального обрабатывающего блока 122 могут включать в себя любую комбинацию следующего: микропроцессор, микроконтроллер, центральный обрабатывающий блок с одним обрабатывающим ядром, центральный обрабатывающий блок с двумя обрабатывающими ядрами или центральный обрабатывающий блок с более чем одним обрабатывающим ядром.
Хотя фиг. 1C изображает вычислительное устройство 100, которое включает в себя один центральный обрабатывающий блок 121, в некоторых вариантах осуществления вычислительное устройство 100 может включать в себя один или несколько обрабатывающих блоков 121. В этих вариантах осуществления вычислительное устройство 100 может хранить и исполнять программно-аппаратные средства или другие исполняемые инструкции, которые при исполнении побуждают один или несколько обрабатывающих блоков 121 одновременно исполнять инструкции или одновременно исполнять инструкции над одним блоком данных. В других вариантах осуществления вычислительное устройство 100 может хранить и исполнять программно-аппаратные средства или другие исполняемые инструкции, которые при исполнении побуждают каждый из одного или нескольких обрабатывающих блоков исполнять секцию группы инструкций. Например, каждый обрабатывающий блок 121 может быть инструктирован исполнять часть программы или конкретный модуль внутри программы.
В некоторых вариантах осуществления обрабатывающий блок 121 может включать в себя одно или несколько обрабатывающих ядер. Например, обрабатывающий блок 121 может иметь два ядра, четыре ядра, восемь ядер и т.д. В одном варианте осуществления обрабатывающий блок 121 может содержать одно или несколько параллельных обрабатывающих ядер. Обрабатывающие ядра обрабатывающего блока 121 в некоторых вариантах осуществления могут осуществлять доступ к доступной памяти как к глобальному адресному пространству, или, в других вариантах осуществления, память внутри вычислительного устройства 100 может сегментироваться и назначаться конкретному ядру внутри обрабатывающего блока 121. В одном варианте осуществления каждое из одного или нескольких обрабатывающих ядер или процессоров в вычислительном устройстве 100 может осуществлять доступ к локальной памяти. В дополнительном другом варианте осуществления память внутри вычислительного устройства 100 может разделяться между одним или несколькими процессорами или обрабатывающими ядрами, в то время как к другой памяти может осуществляться доступ от конкретного процессора или поднаборов процессоров. В вариантах осуществления, где вычислительное устройство 100 включает в себя более одного обрабатывающего блока, множество обрабатывающих блоков может быть включено в одну интегральную цепь (IC). Это множество процессоров в некоторых вариантах осуществления может быть взаимосвязано посредством внутренней высокоскоростной шины, которая может называться шиной взаимосоединения элементов.
В вариантах осуществления, где вычислительное устройство 100 включает в себя один или несколько обрабатывающих блоков 121 или обрабатывающий блок 121, включающий в себя одно или несколько обрабатывающих ядер, процессоры могут исполнять одну инструкцию одновременно над множеством блоков данных (SIMD), или, в других вариантах осуществления, могут исполнять множество инструкций одновременно над множество блоков данных (MIMD). В некоторых вариантах осуществления вычислительное устройство 100 может включать в себя любое количество процессоров SIMD и MIMD.
Вычислительное устройство 100 в некоторых вариантах осуществления может включать в себя процессор изображений, графический процессор или графический обрабатывающий блок. Графический обрабатывающий блок может включать в себя любую комбинацию программных средств и аппаратных средств и может дополнительно вводить графические данные и графические инструкции, визуализировать графику из введенных данных и инструкций и выводить визуализированную графику. В некоторых вариантах осуществления графический обрабатывающий блок может включаться в обрабатывающий блок 121. В других вариантах осуществления вычислительное устройство 100 может включать в себя один или несколько обрабатывающих блоков 121, где по меньшей мере один обрабатывающий блок 121 специализирован для обработки и визуализации графики.
Один вариант осуществления вычислительной машины 100 включает в себя центральный обрабатывающий блок 121, который связывается с кэш-памятью 140 через вторичную шину, также известную как внутренняя шина, в то время как другой вариант осуществления вычислительной машины 100 включает в себя центральный обрабатывающий блок 121, который связывается с кэш-памятью посредством системной шины 150. Локальная системная шина 150 в некоторых вариантах осуществления может также быть использована центральным обрабатывающим блоком для связи с I/O-устройством 130A-130N более чем одного типа. В некоторых вариантах осуществления локальная системная шина 150 может быть шиной любого из следующих типов: шина VESA VL; шина ISA; шина EISA; шина микроканальной архитектуры (MCA); шина PCI; шина PCI-X; шина PCI-Express; или NuBus. Другие варианты осуществления вычислительной машины 100 включают в себя I/O-устройство 130A-130N, которое является видеодисплеем 124, который связывается с центральным обрабатывающим блоком 121. Дополнительные другие версии вычислительной машины 100 включают в себя процессор 121, соединенный с I/O-устройством 130A-130N посредством любого из следующих соединений: HyperTransport, RapidIO или InfiniBand. Дополнительные варианты осуществления вычислительной машины 100 включают в себя процессор 121, который связывается с одним I/O-устройством 130A посредством локальной взаимосоединяющей шины и вторым I/O-устройством 130B посредством прямого соединения.
Вычислительное устройство 100 в некоторых вариантах осуществления включает в себя основной блок 122 памяти и кэш-память 140. Кэш-память 140 может иметь любой тип памяти и в некоторых вариантах осуществления может иметь любой из следующих типов памяти: SRAM; BSRAM; или EDRAM. Другие варианты осуществления включают в себя кэш-память 140 и основной блок 122 памяти, который может быть памятью любого из следующих типов: статическая оперативная память (SRAM), импульсная SRAM или синхронно-импульсная SRAM (BSRAM); динамическая оперативная память (DRAM); DRAM с режимом быстрого доступа к страницам (FPM DRAM); улучшенная DRAM (EDRAM), RAM с расширенным выводом данных (EDO RAM); DRAM с расширенным выводом данных (EDO DRAM); импульсная DRAM с расширенным выводом данных (BEDO DRAM); улучшенная DRAM (EDRAM); синхронная DRAM (SDRAM); JEDEC SRAM; PC100 SDRAM; SDRAM с двойной скоростью данных (DDR SDRAM); улучшенная SDRAM (ESDRAM); SyncLink DRAM (SLDRAM); Direct Rambus DRAM (DRDRAM); ферроэлектрическая RAM (FRAM); или любой другой тип памяти. Дополнительные варианты осуществления включают в себя центральный обрабатывающий блок 121, который может осуществлять доступ к основной памяти 122 посредством: системной шины 150; порта 103 памяти; или любого другого соединения, шины или порта, который обеспечивает возможность процессору 121 осуществлять доступ к памяти 122.
Один вариант осуществления вычислительного устройства 100 обеспечивает поддержку для любого из следующих устройств 116 установки: CD-ROM-накопитель, CD-R/RW-накопитель, DVD-ROM-накопитель, ленточные накопители различных форматов, USB-устройство, самозагружаемый носитель, самозагружаемый CD, самозагружаемый CD для GNU/Linux-распространения, такой как K KNOPPIX®, накопитель на жестких дисках или любое другое устройство, подходящее для установки приложений или программных средств. Приложения в некоторых вариантах осуществления могут включать в себя клиентский агент 120 или любую часть клиентского агента 120. Вычислительное устройство 100 может дополнительно включать в себя устройство 128 хранения, которое может быть либо одним, либо несколькими накопителями на жестких дисках или одним или несколькими избыточными массивами из независимых дисков; где устройство хранения сконфигурировано для хранения операционной системы, программных средств, программных приложений или по меньшей мере части клиентского агента 120. Дополнительный вариант осуществления вычислительного устройства 100 включает в себя устройство 116 установки, которое используется как устройство 128 хранения.
Вычислительное устройство 100 может дополнительно включать в себя сетевой интерфейс 118 для осуществления интерфейса с локальной сетью (LAN), сетью широкого охвата (WAN) или Интернетом через множество различных соединений, включая, но не ограничиваясь, стандартные телефонные линии, линии связи LAN или WAN (например, 802.11, T1, T3, 56kb, X.25, SNA, DECNET), широкополосные соединения (например, ISDN, Frame Relay, ATM, Gigabit Ethernet, Ethernet-over-SONET), беспроводные соединения или некоторую комбинацию любых или всех из вышеперечисленных. Соединения могут также быть установлены с использованием множества различных протоколов связи (например, TCP/IP, IPX, SPX, NetBIOS, Ethernet, ARCNET, SONET, SDH, интерфейса передачи данных по волокну (FDDI), RS232, RS485, IEEE 802.11, IEEE 802.11a, IEEE 802.11b, IEEE 802.11g, CDMA, GSM, WiMax и прямых несинхронных соединений). Одна версия вычислительного устройства 100 включает в себя сетевой интерфейс 118 с возможностью связи с дополнительными вычислительными устройствами 100' посредством любого типа и/или формы протокола шлюза или туннелирования, такого как уровень защищенных сокетов (SSL) или безопасность на транспортном уровне (TLS), или протокол шлюза Citrix, изготовленный Citrix System, Inc. Версии сетевого интерфейса 118 могут содержать любое из: встроенного сетевого адаптера; сетевой интерфейсной карты; сетевой карты PCMCIA; сетевого адаптера шины карты; адаптера беспроводной сети; сетевого адаптера USB; модема; или любого другого устройства, подходящего для осуществления интерфейса вычислительного устройства 100 с сетью с возможностью осуществления связи и выполнения способов и систем, описанных здесь.
Варианты осуществления вычислительного устройства 100 включают в себя любое одно из следующих I/O-устройств 130A-130N: клавиатура 126; указывающее устройство 127; мыши; сенсорные панели; оптическое перо; трекболы; микрофоны; графические планшеты; видеодисплеи; динамики; струйные принтеры; лазерные принтеры; и сублимационные принтеры; или любое другое устройство ввода-вывода с возможностью выполнения способов и систем, описанных здесь. Средство 123 I/O-управления может в некоторых вариантах осуществления подключаться к множеству I/O-устройств 103A-130N для управления одним или несколькими I/O-устройствами. Некоторые варианты осуществления I/O-устройств 130A-130N могут быть сконфигурированы для обеспечения хранилища или носителя 116 установки, в то время как другие могут обеспечивать интерфейс универсальной последовательной шины (USB) для приема устройств хранения USB, таких как линия флэш-накопителей USB устройств, изготовленных Twintech Industry, Inc. Дополнительные другие варианты осуществления включают в себя I/O-устройство 130, которым может быть мост между системной шиной 150 и шиной внешней связи, такой как: USB-шина; шина настольных систем Apple; последовательное соединение RS-232; шина SCSI; шина FireWire; шина FireWire 800; шина Ethernet; шина AppleTalk; шина Gigabit Ethernet; шина режима асинхронной передачи; шина HIPPI; шина Super HIPPI; шина SerialPlus; шина SCI/LAMP; шина FibreChannel; или интерфейсная шина последовательно соединенной системы малых компьютеров.
В некоторых вариантах осуществления вычислительная машина 100 может исполнять любую операционную систему, в то время как в других вариантах осуществления вычислительная машина 100 может исполнять любую из следующих операционных систем: версии операционных систем Microsoft Windows; различные выпуски операционных систем Unix и Linux; любая версия MAC OS, изготовленная Apple Computer; OS/2, изготовленная International Business Machines; Android от Google; любая встроенная операционная система; любая операционная система реального времени; любая операционная система c открытым исходным кодом; любая запатентованная операционная система; любые операционные системы для мобильных вычислительных устройств; или любые другие операционные системы. В дополнительном другом варианте осуществления вычислительная машина 100 может исполнять множество операционных систем. Например, вычислительная машина 100 может исполнять PARALLELS или другую платформу виртуализации, которая может исполнять или руководить виртуальной машиной, исполняющей первую операционную систему, в то время как вычислительная машина 100 исполняет вторую операционную систему, отличную от первой операционной системы.
Вычислительная машина 100 может осуществляться в любом из следующих вычислительных устройств: вычислительная рабочая станция; настольный компьютер; переносной компьютер или ноутбук; сервер; карманный компьютер; мобильный телефон; портативное устройство дальней связи; устройство проигрывания мультимедиа; игровая система; мобильное вычислительное устройство; нетбук, планшет; устройство из серии устройств IPOD или IPAD, изготовленных Apple Computer; любое из серии устройств PLAYSTATION, изготовленных Sony Corporation; любое из серии устройств Nintendo, изготовленных Nintendo Co.; любое из серии устройств XBOX, изготовленных Microsoft Corporation; или любой другой тип и/или форма устройства вычисления, дальней связи или среды, которые имеют возможность связи и которые имеют достаточную процессорную мощность и объем памяти для выполнения способов и систем, описанных здесь. В других вариантах осуществления вычислительной машиной 100 может быть мобильное устройство, такое как любое из следующих мобильных устройств: сотовый телефон с возможностями JAVA или "электронный помощник" (PDA); любое вычислительное устройство, которое имеет различные процессоры, операционные системы и устройства ввода, согласующиеся с устройством; или любое другое мобильное вычислительное устройство с возможностью выполнения способов и систем, описанных здесь. В дополнительных других вариантах осуществления, вычислительное устройство 100 может быть любым из следующих мобильных вычислительных устройств: любая серия Blackberry или другое карманное устройство, изготовленное Research In Motion Limited; iPhone, изготовленный Apple Computer; Palm Pre; Pocket PC; телефон Pocket PC; телефон Android; или любое другое карманное мобильное устройство. Были описаны конкретные системные компоненты и признаки, которые могут подходить для использования в настоящих системах и способах; ниже будут рассмотрены дополнительные аспекты.
Были описаны варианты осуществления вычислительных устройств и сред, которые могут подходить для способов и систем для захвата безартефактных изображений; далее будут подробно описаны конкретные варианты осуществления способов и систем.
Биометрические устройства могут включать в себя камеру (или точку наблюдения) и одно или несколько осветительных средств, такие как вариант осуществления, изображенный на фиг. 2. Термин "точка наблюдения " используется частично для отражения возможности того, что датчик камеры может находиться в одной позиции, и оптические средства, такие как призмы и зеркала, могут быть использованы для смещения оптической точки наблюдения к другой позиции. Точка наблюдения может содержать область или объем захвата изображения с точки зрения камеры или датчика. Каждая точка наблюдения может также соответствовать позиции отдельной камеры или датчика, одновременной или последовательной с другой точкой наблюдения. Таким образом, N точек фотографирования могут захватываться путем установки вплоть до N камер или датчиков. Фиг. 3A изображает один вариант осуществления фронтального вида пользователя, имеющего на себе очковую оптику, такую как очки. Фиг. 3A сверху в центре изображает для конфигурации с фиг. 1 один вариант осуществления вида, наблюдаемого из точки наблюдения при включенных осветительных средствах. В зависимости от наклона (угла относительно горизонтальной оси) головы пользователя и наклона оптических поверхностей очков, зеркальные отражения от осветительных средств могут отражаться непосредственно от поверхности оптических поверхностей очков обратно в точку наблюдения, будучи захваченными как изображение, тем самым затемняя радужную оболочку на изображении, полученном устройством получения биометрических характеристик.
Фиг. 4 изображает одну конкретную конфигурацию раскрываемых способов и систем для захвата безартефактных изображений, которая будет использована для иллюстрации. В этой конфигурации есть две точки наблюдения, расположенные вертикально друг относительно друга так, чтобы первая точка наблюдения находилась сверху, а вторая точка наблюдения находилась снизу, в некоторых вариантах осуществления также есть две раздельных позиции осветительных средств, находящихся слева и справа от каждой соответственной камеры, как показано. Зеркальные отражения могут происходить, когда направление очков такое, что освещение от осветительного средства отражается непосредственно от поверхностей очков непосредственно в точку наблюдения камеры. Направлением очков может быть непросто управлять для решения проблемы, поскольку это может быть функция от того, как пользователь наклоняет свою голову, а также наклона оптических поверхностей самих очков. Вместо этого в одной конфигурации системы, осуществляемой в устройстве получения биометрических характеристик, точкой наблюдения камеры может осуществляться управление, такое как задействование двух или более точек фотографирования в различных вертикальных положениях для получения изображений одновременно из каждой точки наблюдения и/или камеры. Таким образом, для некоторого заданного направления наклона очков, зеркальное отражение может возникать в различных вертикальных позициях в каждой точке наблюдения.
В другой конфигурации системы можно задействовать два или более раздельных осветительных средства с различными вертикальными позициями, одновременно получающих изображения из одной или нескольких точек фотографирования. Поскольку осветительные средства находятся в различных вертикальных позициях, для некоторых заданных точек фотографирования зеркальное отражение возникает в различных позициях, если изображения получаются сначала при включенном первом отдельном осветительном средстве и выключенном втором, и затем при включенном втором отдельном осветительном средстве и выключенном первом. Одно существенное преимущество использования двух точек фотографирования в по существу различных вертикальных позициях (например, напротив двух осветительных средств) состоит в том, что изображения из каждой точки наблюдения могут быть получены в идентичное или одно и то же время вместо ожидания переключения или управления осветительных средств. Это существенно, когда пользователь находится в движении относительно биометрического устройства, поскольку в некоторых случаях может не быть времени на ожидание управления осветительных средств перед тем, как пользователь покинет объем захвата устройства получения биометрических характеристик. Одна иллюстративная конфигурация использует оба подхода: две точки наблюдения, которые различаются по меньшей мере в вертикальном направлении, и два раздельных осветительных средства, которые также расположены различным образом по меньшей мере в вертикальном направлении. Как будет иллюстрироваться ниже, это подход также имеет преимущество подчеркивания углового различия между точками наблюдения, пользователем и осветительным средством так, чтобы существенный сдвиг зеркальных отражений или других артефактов мог достигаться минимальным размером конфигурации устройства получения биометрических характеристик.
Теперь это будет проиллюстрировано более подробно посредством различных вариантов осуществления системы. Фиг. 5 изображает, для конфигурации с фиг. 4, центральный вид из верхней точки наблюдения при включенном верхнем левом осветительном средстве. В этом случае угол, образуемый между верхним левым осветительным средством, оптическими поверхностями очков пользователя и верхней точкой наблюдения, может быть таким, что зеркальное отражение оказывается выше радужной оболочки так, что область глаза в этом случае не перекрыта. Однако следует заметить, что это может быть функция от угла наклона головы пользователя, а также угла наклона оптических поверхностей очков. Также следует заметить, что вертикальная позиция зеркального отражения может быть одной и той же от обеих из левой и правой сторон очков, поскольку наклон оптического материала с каждой стороны очков может обычно быть одним и тем же. Фиг. 6 изображает, в центре чертежа, пример вида из нижней точки наблюдения при включенном верхнем левом осветительном средстве. В этом случае угол, образуемый между верхним левым осветительным средством, очковой оптикой (например, очками) пользователя, и нижней точкой наблюдения, может быть таким, что зеркальное отражение оказывается на радужной оболочке, отчего радужная оболочка может быть перекрыта. Фиг. 7 изображает, в центре чертежа, пример вида из верхней точки наблюдения, который включает в себя зеркальные отражения от нижнего правого осветительного средства. В этом случае угол, образуемый между нижним правым осветительным средством, очками пользователя и верхней точкой наблюдения, может быть таким, что зеркальное отражение оказывается на радужной оболочке так, что она искажается или перекрывается на полученном изображении.
Фиг. 8 изображает, в центре чертежа, пример вида из нижней точки наблюдения при включенном нижнем правом осветительном средстве. В этом случае угол, образуемый между нижним правым осветительным средством, очками пользователя и нижней точкой наблюдения, может быть таким, что зеркальное отражение возникает ниже области радужной оболочки так, что радужная оболочка оказывается не перекрыта или не искажена на соответственно захваченном изображении. Таким образом, для конфигураций, аналогичных показанной на фиг. 4, посредством изображений из по меньшей мере двух различных вертикальных точек фотографирования и с использованием осветительных средств, которые находятся в двух различных вертикальных позициях, наблюдаемое вертикальное смещение зеркального отражения внутри захваченных изображений может быть увеличено с учетом конкретного общего размера биометрического устройства, которое размещает в себе осветительные средства и датчик, благодаря чему также увеличивается вероятность или возможность захватить изображения области глаза, на которой отсутствуют зеркальные отражения и другие артефакты.
Фиг. 9 изображает другую конфигурацию системы, в которой есть по меньшей мере одна точка наблюдения и два осветительных средства на расстоянии по вертикали V_i1 и V_i2 от точки наблюдения. В этом случае изображения могут быть получены из заданной точки наблюдения сначала с первой комбинацией по меньшей мере двух раздельных осветительных средств, включенных или выключенных, и затем с другой комбинацией по меньшей мере двух раздельных осветительных средств, включенных или выключенных. Фиг. 10 изображает другую конфигурацию системы, в которой есть по меньшей мере одно осветительное средство и две точки наблюдения на расстоянии по вертикали V_c1 и V_c2 от осветительного средства, которые могут иметь приблизительно одно и то же расстояние по горизонтали до осветительного средства. Следует заметить, что при двух вертикальных точках наблюдения может быть преимущество, даже если используется только одно осветительное средство; например, фиг. 7 изображает зеркальные отражения на радужной оболочке на изображениях, полученных из первой точки наблюдения и при обеспеченном первом осветительном средстве, так, что радужная оболочка перекрыта. Фиг. 5 изображает, что при том же включенном осветительном средстве, но с использованием изображений, полученных из второй вертикальной точки наблюдения, зеркальные отражения могут возникать выше радужной оболочки так, что радужная оболочка не перекрыта. Таким образом, может быть преимущество от наличия по меньшей мере двух точек фотографирования с вертикальным смещением и по меньшей мере одного отдельного осветительного средства, причем точки наблюдения располагаются в по существу различных вертикальных позициях относительно первого осветительного средства.
Фиг. 11 изображает другую примерную конфигурацию системы, в которой есть одно осветительное средство и две точки наблюдения на расстоянии по вертикали V_c1 и V_c2 от осветительного средства и на расстоянии по горизонтали H_c1 и H_c2 соответственно от осветительного средства. В одном варианте осуществления и для иллюстрации две точки наблюдения расположены по диагонали так, чтобы и вертикальные, и горизонтальные позиции точек фотографирования были по существу различны. В этом случае, поскольку точки наблюдения расположены в по существу различных горизонтальных позициях относительно первого осветительного средства, а также в по существу различных вертикальных позициях, расстояние между камерами может быть увеличено или максимизировано с учетом конкретных горизонтальных и вертикальных размеров устройства. Это может увеличить наблюдаемое расстояние между наблюдаемым местоположением зеркальных отражений на изображениях, захваченных из двух местоположений. Это дополнительно улучшает вероятность того, что изображения могут быть захвачены из по меньшей мере одной из точек фотографирования неперекрытой области глаза при одновременном уменьшении или минимизации площади физического размера устройства. В частности, максимальный горизонтальный или вертикальный размер устройства может быть уменьшен. В качестве примера, в одной конфигурации расстояния по вертикали и по горизонтали между камерами могут быть 6 см и 8 см соответственно. Расстояния по вертикали и по горизонтали между камерами могут содержать другие значения, например в диапазоне от 1 см до 1 м.
Фиг. 12 изображает другую примерную конфигурацию системы, в которой есть по меньшей мере два осветительных средства и две точки наблюдения на расстоянии по вертикали V_c1 и V_c2 от первого осветительного средства и на расстоянии по горизонтали H_c1 и H_c2 соответственно от первого осветительного средства, и где второе осветительное средство находится на расстоянии по вертикали V_i2 от первого осветительного средства. В этом случае расстояние между точками наблюдения может быть увеличено или максимизировано, как рассмотрено выше. Кроме того, два осветительных средства в различных позициях могут быть использованы с аналогичными преимуществами, рассмотренными выше.
Фиг. 13 изображает другую примерную конфигурацию системы, в которой есть две камеры, расположенные в различных вертикальных и горизонтальных позициях, и множество раздельных осветительных средств, каждое из которых находится в различных вертикальных и горизонтальных позициях. В этом случае каждое осветительное средство может быть включено отдельно или в комбинации с другими осветительными средствами так, чтобы зеркальное отражение могло быть расположено на или перемещено к различным местоположениям на глазу, благодаря чему максимизируется или увеличивается вероятность того, что одна из позиций может быть оптимальной для получения неперекрытого изображения области, представляющей интерес (например, области радужной оболочки).
Фиг. 14 изображает примерное направление наклона точек фотографирования в конфигурации, где есть две точки наблюдения в различных вертикальных положениях. Точки наблюдения могут сходиться вертикально на номинальном рабочем расстоянии D к той же высоте, что и все другие, относительно вертикального направления пользователя, поскольку глаза пользователя также находятся на одной высоте по вертикали. Если это не так, глаза пользователя не обязательно могут быть видны из обеих точек фотографирования одновременно. Значение наклона в некоторых вариантах осуществления может быть описано следующим геометрическим смыслом; точки наблюдения могут быть наклонены относительно по существу горизонтальной оси каждая на угол тета_v, вычисляемый как тета_v=arctg(0,5*(V_c2-V_c1)/D), где (V_c2-V_c1) - расстояние по вертикали между точками наблюдения, а D - номинальное расстояние от точек фотографирования до пользователя. В качестве варианта одна камера может быть наклонена больше или меньше, чем другая, при условии, что точки наблюдения сходятся вертикально на номинальном рабочем расстоянии, как рассмотрено ранее. Например, при рабочем диапазоне 30 см и вертикальном разносе камер 6 см угол тета_H может быть определен как равный 5,7 градусов.
Подобным образом, фиг. 15 изображает примерное направление наклона точек фотографирования в конфигурации, где есть две точки наблюдения в различных горизонтальных положениях. Значение наклона может быть дано следующим геометрическим смыслом; точки наблюдения могут быть наклонены относительно по существу вертикальной оси каждая на угол тета_h, вычисляемый как тета_h=arctg(0,5*(H_c2-H_c1)/D), где (H_c2-H_c1) - расстояние по горизонтали между точками наблюдения, а D - номинальное расстояние от точек фотографирования до пользователя. В качестве варианта, одна камера может быть наклонена больше или меньше, чем другая, при условии, что точки наблюдения сходятся по горизонтали на номинальном рабочем расстоянии, как рассмотрено ранее. Следует заметить, что различные вертикальные и горизонтальные точки наблюдения могут комбинироваться, как показано на фиг. 11, 12 и 13.
Одно преимущество раскрываемой системы относится к наличию возможности уменьшения или устранения негативных воздействий на производительность, возникающих из-за артефактов помимо зеркальных отражений. Такие артефакты могут включать в себя грязь на поверхности линз очков или могут включать в себя перекрытие частей радужной оболочки оправой самих очков. Фиг. 16 изображает условия, при которых изображения получаются из первой позиции камеры, в то время как фиг. 17 изображает условия, при которых изображения получаются из второй, более низкой позиции камеры. Фиг. 18 изображает боковой вид соответствующих условий получения изображений. На пользователе надеты очки, и расстояние от радужной оболочки до оправы очков равно D2. Расстояние от радужной оболочки до каждой камеры равно D. Расстояние D2 может быть существенным, поскольку факт того, что это расстояние не нулевое, может означать, что изображения области глаза, захваченные из различных точек фотографирования, могут давать в результате параллакс, или относительное смещение, соответствующих признаков на изображениях, которыми в этом случае является оправа очков и сама радужная оболочка. Размер относительного смещения может зависеть от параметров получения изображения, таких как расстояние D от камер до радужной оболочки, а также D2. Фиг. 19 с левой стороны чертежа изображает в качестве примера изображения, захваченные из верхней точки наблюдения. Фиг. 19 с правой стороны чертежа изображает в качестве примера изображения, полученные из нижней точки наблюдения. Следует заметить, что радужная оболочка частично перегорожена оправой очков на изображениях, полученных из верхней точки наблюдения, но не перегорожена на изображениях, полученных из нижней точки наблюдения. Это происходит ввиду параллакса между двумя изображениями, созданными из двух различных позиций камер, и различных относительных дальностей или расстояния радужной оболочки от камер и оправы очков. Тот же параллакс может быть наблюдаем для любого объекта, находящегося на другой дальности от камеры по сравнению с радужной оболочкой, такого как грязь на поверхностях очков или линия, возникающая из-за границы между близкими и далекими оптическими поверхностями линз в очках с бифокальными линзами. Способы для обработки этих типов изображений будут описаны позже.
Следует заметить, что положение таких артефактов (оправа очков, грязь на линзах, бифокальные границы) на меняется на изображениях, полученных из одной позиции датчика, если нет относительного движения в диапазоне между датчиком и пользователем, даже если объект съемки освещен множеством осветительных средств с различных направлений. В этом состоит отличие от артефактов ввиду зеркальных отражений от линз, которые в действительности изменяют положение, будучи освещенными множеством осветительных средств из различных положений, поскольку артефакты возникают ввиду самих осветительных средств, а не других объектов.
Параллакс может создаваться путем любого или обоих из горизонтального и вертикального смещения камер или путем движения пользователя, что также рассматривается в раскрытии. Мы отметили преимущество вертикального смещения камер, как показано на фиг. 20. В обычном случае мы отметили, что пользователи легко выравниваются естественным образом перед системой в горизонтальном (фронтальном) направлении, поскольку есть в сущности только одна степень свободы, которой является горизонтальное положение их ступней. Однако мы заметили, что вертикальное выравнивание пользователей относительно системы получения биометрических характеристик может быть функцией от нескольких переменных, включающих в себя наклон головы пользователя и вертикальной позиции очков на носу пользователя, обе из которых могут быть очень сложны для описания для регулирования пользователем. Горизонтальная позиция очков, с другой стороны, может быть ограничена как в сущности фиксированная геометрией носа и перемычки очков. В результате мы измерили меньшее перекрытие от левой и правой границ оправы очков по сравнению с верхней и нижней границами оправы очков. Дополнительно, бифокальные линзы обычно могут создавать горизонтальный линейный артефакт через радужную оболочку. Смещение камер по горизонтали может служить только для перемещения обоих артефактов бифокальных линз и по существу горизонтальных верхней и нижней границ оправы очков в горизонтальном направлении на двух изображениях и может все так же оставлять зону радужной оболочки перекрытой на обоих изображениях. Однако смещение камер по вертикали может служить для перемещения артефактов бифокальной линзы и верхней и нижней границ оправы очков в вертикальном направлении на двух изображениях, тем самым обеспечивая возможность зоне радужной оболочки быть не перекрытой на по меньшей мере одном из изображений.
В другом аспекте может быть использована одна камера и одно осветительное средство. В этом аспекте изображения могут получаться по мере того, как пользователь вращает головой и/или подходит к устройству получения биометрических характеристик, как показано на фиг. 21 и 22. Фиг. 21 изображает, например, условия получения изображений, когда пользователь находится дальше от устройства, в то время как фиг. 22 изображает, например, пользователя, находящегося ближе к устройству, где зеркальное отражение и/или артефакты могут менять позицию относительно зоны радужной оболочки, представляющей интерес, при движении пользователя. Фиг. 23 изображает, например, вид сверху пользователя, перемещающегося по направлению к устройству. В этом случае угол тета_D1 между камерой, осветительным средством и оправой очков может изменяться до тета_D2 ввиду движения пользователя так, чтобы на полученной последовательности изображений зеркальные отражения, которые могли возникнуть в первой позиции, могли переместиться ко второй позиции. Глубина резкости камеры может быть малой, отчего изображения, полученные на различных удаленностях, могут оказываться расфокусированными. Однако это можно решить путем динамического регулирования фокуса камеры.
Фиг. 24 изображает подобную конфигурацию с одной камерой и осветительным средством, с иллюстративным боковым видом приближающегося пользователя. В этом случае перемещение пользователя может создавать параллаксное смещение между оправой очков и радужной оболочкой на полученной последовательности изображений, подобно рассмотренному в связи с фиг. 23.
В других системах, где пользователь не обязательно смотрит на систему, например, изображения могут быть захвачены из множества горизонтальных и вертикальных точек фотографирования или для множества позиций пользователя или направлений взгляда, как показано, например, на фиг. 25.
Фиг. 26 и 27 изображают варианты осуществления обработки, которая может выполняться над множеством полученных изображений. Эти изображения могут быть получены при различных позициях камер, условиях освещения, позициях пользователя или позициях взгляда, как описано в этом раскрытии. Следует заметить, что нет обратной связи от обрабатывающего модуля к модулю управления получением изображения, для того, чтобы регулировать, какое осветительное средство выключено или включено, например. Однако, в модифицированном подходе для того, чтобы избежать или устранить затемнения или другие артефакты от очков, биометрическая система может получать изображение от камеры с включенным одним осветительным средством, анализировать изображения на предмет наличия артефактов и, если необходимо, получать другое изображение с включенным вторым осветительным средством (и выключенным первым осветительным средством). Однако в некоторых контекстах может происходить относительное движение между устройством и пользователем. Например, пользователь может находиться в движении, а устройство может быть стационарным. Таким образом, за время, пока выполняется анализ, область, представляющая интерес, пользователя (например, область радужной оболочки) может переместиться за пределы объема захвата системы. Таким образом, система получения биометрических характеристик может быть сконфигурирована так, чтобы возможный или требуемый максимум изображений получался настолько быстро, насколько это возможно, в режиме незамкнутого цикла (например, без обратной связи об обнаружении артефактов), с использованием предварительно определенной последовательности управления. В случае конфигураций, которые включают в себя множество камер, в отличие от случая конфигураций с множеством осветительных средств и одной камерой, есть преимущество в том, что множество изображений может быть захвачено одновременно различными камерами, тем самым уменьшая время получения. Хотя может быть получено больше изображений, которые могут занимать много памяти и могут увеличивать общее время обработки, изображения однако получаются в более близкой последовательности или даже одновременно во времени и, таким образом, может быть более вероятно, что пользователь будет все еще находиться в соответствующем объеме захвата устройства получения биометрических характеристик в течение периода получения изображений.
В одном аспекте вариант осуществления этапов обработки показан на фиг. 26 с более подробным видом примерного обрабатывающего модуля, показанным на фиг. 27. Обработка может выполняться путем обнаружения артефактов, возникающих от использования или присутствия оправы очков или бифокальной линзы. Эти артефакты могут создавать по существу линейные признаки с высоким контрастом и с длинами, которые могут быть сравнимы с величиной или размерами радужной оболочки. Это отличается от меньших, низкоконтрастных, случайно ориентированных сегментов линий, которые часто находятся в самой структуре радужной оболочки. Системы, описанные здесь, могут быть сконфигурированы для улучшения и/или характеризования линий или признаков конкретных размеров и контрастов. Могут быть выбраны фильтры, чтобы они были настроены на длину и контраст, ожидаемые от артефактов. Каждое изображение может обрабатываться этими фильтрами и, с конкретными способами обнаружения, может создаваться промежуточное выходное изображение, которое дает максимальную энергию для настроенной модели границы в любом направлении в каждом отдельном пикселе на изображении. Если энергия границы выше некоторого порога, например, система может определять, что в этом месте на изображении присутствует артефакт.
Процесс поиска глаз может выполняться путем обнаружения границ зрачка/радужной оболочки и радужной оболочки/склеры с использованием, например, преобразования Хафа. Эта извлеченная информация может быть использована одним из по меньшей мере двух способов. В первом способе может выполняться процесс ранжирования, который совмещает обнаруженную зону, которая должна быть перекрыта артефактами, с обнаруженной зоной, которая должна быть радужной оболочкой, чтобы вычислить процентную меру перекрытия радужной оболочки для каждого полученного изображения, и помещает их по порядку в список. Изображения в начале списка могут быть выбраны для последующей обработки, поскольку они могли быть обнаружены как наименее искаженные артефактами.
Во втором способе местоположения границ зрачка/радужной оболочки и радужной оболочки/склеры могут быть использованы для совместного регистрирования полученных изображений и изображений энергии границ. Эти совмещенные изображения могут дополнительно обрабатываться так, чтобы зарегистрированная энергия границ в каждом местоположении изображения анализировалась для каждого полученного изображения, и местоположения изображения, где энергии границ выше некоторого порога или больше других энергий границ, соответствующих местоположению изображения, могут отклоняться от дополнительной обработки. Остальные местоположения изображения могут обрабатываться, например, путем выбора пикселов радужной оболочки в местоположении, соответствующем наименьшей энергии границы от артефактов в этом местоположении. В родственном аспекте пикселы изображения, соответствующие зеркальным отражениям, могут также быть использованы в этапе обработки, описанном выше. Зеркальные отражения могут быть обнаружены, и изображение создается как свободное или по существу свободное от зеркальных отражений. В некоторых осуществлениях изображения, получаемые в различное время, могут давать в результате уменьшенную вероятность того, что область, представляющая интерес, пользователя будет все еще находиться в объеме захвата, как рассмотрено ранее. В других осуществлениях биометрическая установка может требовать более одного осветительного средства, которое может увеличить размер и стоимость системы.
Со ссылками на фиг. 28, изображен один вариант осуществления способа получения безартефактных биометрических изображений глаза. Глаз может находиться в относительном движении с первым датчиком (или устройством получения биометрических характеристик) и при наличии частично отражающей очковой оптики. Первый датчик может получать первое изображение глаза, в то время как глаз освещен первым осветительным средством (103). Первое изображение может включать в себя область, представляющую интерес. Первый датчик может быть расположен на фиксированном смещении от первого осветительного средства и второго датчика. Второй датчик может получать, за предварительно определенный период времени от получения первого изображения, второе изображение глаза (105). Второе изображение может включать в себя область, представляющую интерес. Процессор изображений может определять, включает ли в себя по меньшей мере одно из первого и второго изображений артефакты, возникающие от одного или обоих из первого осветительного средства и очковой оптики, внутри области, представляющей интерес (107).
В некоторых вариантах осуществления система получения биометрических характеристик содержит устройство получения биометрических характеристик, которое может включать в себя мобильное, портативное и/или карманное устройство. Устройство может быть использовано для освещения и/или захвата одного или нескольких биометрических изображений объекта. Устройство может включать в себя один или несколько датчиков или камер для получения биометрических данных, таких как инфракрасные датчики. Биометрические данные, на которые нацелено устройство, могут включать в себя радужную оболочку или другую информацию, которая может быть захвачена на изображении, такую как информация сетчатки. Биометрические данные могут быть получены из области, представляющей интерес, определенной на глазу объекта, например, области радужной оболочки глаза. Устройство получения биометрических характеристик может быть сконфигурировано для обнаружения и/или определения местоположения глаз объекта и/или области, представляющей интерес.
Хотя ссылки на получение биометрических данных иногда делаются в отношении глаза, следует понимать, что это делается лишь в целях иллюстрации и не подразумевается как ограничивающее каким-либо образом. Каждый датчик может получать биометрические данные от пары глаз, включающих в себя их соответственные области, представляющие интерес, на одном изображении, например. Таким образом, два набора данных (например, по одному от каждого глаза) может быть захвачено на каждом изображение и использовано в целях биометрической верификации или поиска соответствий, благодаря чему повышается вероятность выхода по меньшей мере одного подходящего набора данных с каждым захватом изображения. Кроме того, одновременный захват двух наборов данных может быть более эффективным по сравнению с отдельным или последовательным получением изображений. Одновременный захват двух наборов данных также полезен, когда объект находится в движении, отчего увеличивается риск, что объект может выйти за пределы объема захвата в течение получения, если эти наборы данных получаются последовательно. Таким образом, любая ссылка на получение первого, второго, третьего или четвертого изображения глаза может быть ссылкой на получение первого, второго, третьего или четвертого изображения пары глаз.
В конкретных вариантах осуществления устройство получения биометрических характеристик может включать в себя одно или несколько осветительных средств или источников света, которые могут быть использованы для освещения области глаза объекта для получения биометрических характеристик. Осветительное средство может быть использовано для освещения одного или нескольких признаков объекта в течение обнаружения и/или определения местоположения глаз объекта или области, представляющей интерес. Осветительное средство может освещать глаз в течение получения биометрических характеристик. Осветительное средство может синхронизироваться с датчиком для включения и/или увеличения уровней освещения в течение получения изображений. Осветительное средство может обеспечивать инфракрасный и/или видимый свет и может содержать источник света на основе LED. Размер и/или коэффициент формы устройства получения биометрических характеристик может быть определен путем компоновки одного или нескольких датчиков и/или осветительных средств.
Со ссылкой на (103), более подробно, первый датчик может получать первое изображение глаза, в то время как глаз освещен первым осветительным средством. Первое изображение может включать в себя область, представляющую интерес, которой может быть область радужной оболочки глаза. Первый датчик может быть расположен на фиксированном смещении от первого осветительного средства и второго датчика, например, как рассмотрено выше в отношении фиг. 4-8 и 10-16 и любой их комбинации. Местоположение первого датчика на устройстве получения биометрических характеристик может быть фиксированным относительно первого осветительного средства и/или второго датчика. В некоторых осуществлениях местоположение первого датчика на устройстве получения биометрических характеристик может быть регулируемым или автоматически регулироваться на основе сценария получения изображений относительно первого осветительного средства и/или второго датчика. Каждый из первого и второго датчика может содержать или относиться к различным точкам наблюдения. В некоторых вариантах осуществления две точки наблюдения поддерживаются одним датчиком или камерой, например, путем использования призм или других отражающих каналов или использования датчика с возможностью изменения местоположения.
В некоторых вариантах осуществления первое осветительное средство может включать в себя один или несколько источников света. Например, множество источников света может быть сконфигурировано для работы в качестве группы, например, для включения или выключения в качестве группы. Пример описан выше в связи с фиг. 13. Первое осветительное средство может быть сконфигурировано для обеспечения уровня освещения, достаточного для освещения одного или двух глаз объекта для получения биометрических характеристик. Первое осветительное средство может светить вспышкой или световым импульсом в сочетании или в синхронизации с получением изображений.
В конкретных вариантах осуществления устройство получения биометрических характеристик может размещать первый и второй датчики так, чтобы оптические оси первого и второго датчиков сходились на по существу номинальном расстоянии D между глазом и датчиками, например, как рассмотрено выше в связи с фиг. 14-15. Номинальное расстояние может соответствовать по существу фокусному расстоянию одного или обоих датчиков так, чтобы признаки глаза находились по существу в фокусе на номинальном расстоянии от одного или обоих датчиков. Оптические оси могут сходиться в приблизительно одной и той же точке так, чтобы первый и второй датчик могли по существу захватывать одну и ту же область признаков объекта, находящегося на номинальном расстоянии от первого и второго датчиков. В конкретных вариантах осуществления первый и второй датчики могут получать область, представляющую интерес, одновременно, если она находится возле точки сходимости. Устройство получения биометрических характеристик может наклонять первый и второй датчики на угол тета относительно линии, соединяющей глаз и срединную точку между первым и вторым датчиками, согласно тета=arctg(0,5*S/D), где S - расстояние разноса между первым и вторым датчиками, а D - расстояние от глаза до срединной точки между первым и вторым датчиками. Угол наклона может варьировать между двумя датчиками в зависимости от расстояния каждого датчика от глаза. Например, угол наклона для первого датчика (например, больший чем тета) может быть больше угла наклона второго датчика (например, меньшего чем тета).
В некоторых вариантах осуществления первый датчик получает первое изображение глаза во время освещения первым осветительным средством. Первый датчик может быть смещен по вертикали относительно второго датчика. Первый датчик может быть смещен по горизонтали относительно второго датчика. Первый датчик может быть смещен и по вертикали, и по горизонтали относительно второго датчика, например, как рассмотрено выше в связи с фиг. 11-13.
Со ссылкой на (105), более подробно, второй датчик может получать, за предварительно определенный период времени от получения первого изображения, второе изображение глаза (105). Второе изображение может включать в себя ту же область, представляющий интерес, например область радужной оболочки глаза. Второй датчик может получать второе изображение глаза во время освещения первым осветительным средством. Второй датчик может получать второе изображение внутри короткого периода после первого изображения, например за 200 мс, 50 мс, 10 мс или некоторое другое значение. Второй датчик может получать, одновременно с получением первого изображения, второе изображение глаза. Например, второй датчик может захватывать второе изображение в ответ на инициацию захвата первого изображения. Время для захвата второго изображения может частично совпадать или по существу частично совпадать с временем для захвата первого изображения. Первый и второй датчик могут захватывать первое и второе изображения в синхронизации с вспышкой или световым импульсом первого осветительного средства. Одновременный захват первого и второго изображений может обеспечивать, чтобы объект (и его область, представляющая интерес) в движении не вышел за пределы объема захвата устройства получения биометрических характеристик между получением двух изображений. Устройство получения биометрических характеристик может выбирать и/или комбинировать части двух изображений для биометрической верификации.
В некоторых вариантах осуществления первый датчик получает третье изображение глаза во время освещения вторым осветительным средством. Второе осветительное средство может быть расположено на предварительно определенном расстоянии от первого осветительного средства, например, как описано выше в связи с фиг. 2, 3B, 4-9 и 13 или любой их комбинацией. Первый датчик может получать, за предварительно определенное время от получения первого изображения, третье изображение глаза. Первый датчик может получать третье изображение, когда первое осветительное средство выключено, а второе осветительное средство включено. Первый датчик может получать третье изображение внутри короткого периода времени после первого изображения, например за 200 мс, 50 мс, 10 мс или некоторое другое значение. Второе осветительное средство может быть расположено на расстоянии по вертикали от первого осветительного средства. Второе осветительное средство может быть расположено на расстоянии по горизонтали от первого осветительного средства. Второе осветительное средство может быть расположено на расстоянии по вертикали и/или по горизонтали от первого осветительного средства.
В некоторых вариантах осуществления второй датчик получает четвертое изображение глаза во время освещения вторым осветительным средством. Второй датчик может получать четвертое изображение за предварительно определенный период времени от получения третьего изображения. Второй датчик может получать четвертое изображение одновременно с получением третьего изображения, например, в синхронизации с вторым осветительным средством. Устройство получения биометрических характеристик может получать и/или сохранять одно или несколько изображений (например, первое, второе, третье и четвертое изображения) для групповой обработки. Устройство получения биометрических характеристик может получать и/или сохранять одно или несколько изображений в процессе с незамкнутым циклом, т.е. без обратной связи, на основе анализа изначально полученных одного или нескольких изображений для инициации получения дальнейшего/дополнительного изображения(-й). Устройство получения биометрических характеристик может получать и/или сохранять множество изображений для улучшения или максимизации вероятности того, что одно или несколько из этих изображений могут быть свободны от артефактов внутри области, представляющей интерес.
Со ссылкой на (107), более подробно, процессор изображений может определять, включает ли в себя по меньшей мере одно из первого и второго изображений артефакты, возникающие от одного или обоих из первого осветительного средства и очковой оптики, внутри области, представляющей интерес. Устройство получения биометрических характеристик может включать в себя процессор изображений или может осуществлять связь с процессором изображений. Обработка изображений может выполнять любую из обработок, рассмотренных выше в связи с фиг. 26-27. Процессор изображений может определять, включает ли в себя по меньшей мере одно из первого и второго изображений зеркальное отражение от очковой оптики внутри области, представляющей интерес. Зеркальное отражение может возникать от первого осветительного средства, которое отражается (например, в виде блика, светового насыщения, искажения) от линзы очковой оптики, надетой поверх глаза. Ввиду искривления поверхности(-ей) очковой оптики или линзы зеркальное отражение может быть увеличено и может распространяться на существенную часть линзы а также на полученное изображение области(-ей) глаза. В некоторых вариантах осуществления зеркальное отражение распространяется на одну или обе области глаза, которые могут быть получены одним и тем же датчиком на одном изображении. Процессор изображений может определять наличие зеркального отражения, которое может быть идентифицировано как артефакт, возникающий из-за наличия очковой оптики и/или соответствующего осветительного средства.
В конкретных вариантах осуществления процессор изображений определяет, включает ли в себя по меньшей мере одно из первого и второго изображений по меньшей мере одно из: препятствия от нелинзовой части очковой оптики, нарушения непрерывности в линзе очковой оптики и искажения от края линзы. Препятствие от нелинзовой части очковой оптики может включать в себя препятствие (например, радужной оболочки) от оправы очков, оттеночной краски, маркировки, гравировки и т.д. Нарушение непрерывности в линзе очковой оптики может включать в себя, например, переход между частями бифокальной линзы, царапины линзы, трещины в линзе, инородные частицы/грязь на линзе и т.д. Искажение от края линзы может включать в себя огрубленные границы линзы у оправы, явно выраженное искривление в линзе и т.д. Процессор изображений может определять наличие таких препятствий, нарушений непрерывности и/или искажений и может определять их как артефакты изображения, возникающие из-за использования или наличия очковой оптики.
В некоторых вариантах осуществления процессор изображений может выбирать, на основе определения, по меньшей мере часть области, представляющей интерес, с одного или обоих из первого и второго изображений для использования в биометрической верификации. Хотя на некоторых этапах обработки в целях иллюстрации ссылка может делаться на первое и второе изображения, любая группа изображений, которая может включать в себя третье, четвертое или любые другие изображения, может учитываться в выборе и/или последующей комбинации. Выбор одной или нескольких частей области, представляющей интерес, на одном или нескольких изображениях, может выполняться на основе одного или нескольких критериев выбора. Например, процессор изображений может выбирать лучшее изображение или подходящую часть на основе меры совпадения, которая может указывать на возможность совпадения с изображением утвержденного качества или биометрическим шаблоном, процессор изображений может выбирать лучшее изображение или подходящую часть на основе меры качества, которая может быть определена признаками или характеристиками на изображении, представляющимися согласующимися с или подобными биометрическим признакам (например, радужной оболочке, а не части очковой оптики).
В конкретных вариантах осуществления процессор изображений может полагаться на обнаружение краев для определения границы области, представляющей интерес, например для определения наличия биометрических признаков, к которым могут быть применены критерии выбора. Процессор изображений может определять через обнаружение краев, перекрыта или искажена ли граница артефактами. Процессор изображений может использовать пороги интенсивности для обнаружения артефактов, таких как насыщенные области ввиду зеркального отражения или наличия освещенной грязи. Процессор изображений может определять, что одно из первого и второго изображений включает в себя артефакты внутри области, представляющей интерес, и может выбирать другое изображение для целей биометрической верификации. Процессор изображений может определять, что одно или несколько из изображений свободны от артефактов и могут быть использованы для биометрической верификации. Процессор изображений может определять, что все из изображений включают в себя один или несколько артефактов внутри области, представляющей интерес. В некоторых вариантах осуществления процессор изображений может выбирать часть зоны, представляющей интерес, при этом исключая другую часть, на которой обнаружен артефакт, для частичной биометрической верификации.
В конкретных вариантах осуществления процессор изображений может комбинировать выбранные одну или несколько частей области, представляющей интерес, для биометрической верификации. Например, процессор изображений может выбирать части области, представляющей интерес, с обоих первого и второго изображений для комбинирования в изображение для биометрической верификации. Части с любого одного или нескольких из первого, второго, третьего и четвертого изображений могут быть выбраны и скомбинированы (например, соединены или сшиты друг с другом или скомпонованы в структуру данных). Процессор изображений может выбирать или извлекать биометрическую информацию из частей области, представляющей интерес, для комбинации или сшивания для дальнейшего использования в биометрической верификации.
В другом аспекте настоящее раскрытие направлено на способ получения безартефактных биометрических изображений глаза, например, как описано выше в связи с фиг. 21-24. Глаз или глаза, являющиеся целью, могут находиться в относительном движении с первым датчиком и при наличии частично отражающей очковой оптики, надетой над глазом(-ами). Способ может включать в себя получение, посредством первого датчика, первого изображения глаза, в то время как глаз находится в первой позиции по отношению к датчику и освещен первым осветительным средством (203). Первое изображение может включать в себя область, представляющую интерес. Первый датчик может быть расположен на фиксированном смещении от первого осветительного средства. Первый датчик может получать, за предварительно определенное время от получения первого изображения, второе изображение глаза, в то время как глаз находится во второй позиции и освещен первым осветительным средством (205). Второе изображение может включать в себя область, представляющую интерес. Процессор изображений может определять, включает ли в себя по меньшей мере одно из первого и второго изображений артефакты, возникающие от одного или обоих из первого осветительного средства и очковой оптики, внутри области, представляющей интерес (207). Процессор изображений может выбирать, на основе определения, по меньшей мере часть области, представляющей интерес, с одного или обоих из первого и второго изображений для использования в биометрической верификации (209).
В этом аспекте, операция с одним датчиком может возникать в контексте способа и/или системы с фиг. 28. Таким образом, некоторые из этапов способа могут включать в себя любые из этапов, признаков или обработок, описанных выше в связи с или задействованных из фиг. 28. Операция с одним датчиком может эффективно использоваться в любом варианте осуществления системы с одним или множеством датчиков, описанной на фиг. 2-28. Например, один из двух датчиков может быть выключен или выведен из строя для осуществления на практике способа получения с одним датчиком для захвата безартефактных изображений.
Со ссылкой на (203), первый датчик может получать первое изображение глаза, в то время как глаз находится в первой позиции по отношению к датчику и освещен первым осветительным средством (203). Первое изображение может включать в себя область, представляющую интерес. Первый датчик может быть расположен на фиксированном смещении от первого осветительного средства. Этап (203) может включать в себя любой из этапов, признаков или обработок, описанных выше в связи с или задействованных из (103). Первый датчик может получать первое изображение глаза, в то время как глаз находится в относительном движении с датчиком. Первый датчик может получать первое изображение глаза, когда глаз имеет первое положение или направление взгляда относительно первого датчика. Первый датчик может получать первое изображение глаза, когда глаз находится на первом расстояние от первого датчика.
В другом аспекте настоящие системы могут быть сконфигурированы для обеспечения того, чтобы движение пользователя относительно датчика было непараллельно оптической оси датчика. Пример этого показан на фиг. 24. Это может достигаться, например, путем расположения механизма зрительного контакта или направления взгляда на различных местоположениях относительно камеры так, чтобы пользователь или устройство перемещались вдоль линии от глаза к механизму зрительного контакта вместо направления вдоль линии от глаза к камере. Например, механизм зрительного контакта может быть расположен на конкретном расстоянии от датчика так, чтобы оптическая ось датчика и ось взгляда пользователя были непараллельны.
Когда движение пользователя относительно датчика параллельно оптической оси датчика, это движение может давать в результате нулевой параллакс вдоль оптической оси и только малый параллакс, когда направление движения близко к оптической оси, в результате чего получаются ограниченные изменения или сдвиги в артефактах, захваченных на изображениях, и уменьшается возможность для получения по меньшей мере некоторых изображений, на которых отсутствуют артефакты.
Когда движение пользователя относительно датчика непараллельно оптической оси датчика, такое движение может давать в результате увеличенный параллакс вдоль и возле оптической оси в полученной последовательности изображений, благодаря чему обеспечивается возможность большего изменения или сдвига в артефактах, захваченных на изображениях, и увеличения вероятности извлечения безартефактных изображений.
В некоторых вариантах осуществления устройство получения биометрических характеристик включает в себя средство для управления направлением взгляда объекта или глаза (глаз) объекта. Это средство направления взгляда может быть расположено на предварительно определенном расстоянии от оптической оси датчика, например между первым датчиком и первым осветительным средством или выше как оптической оси датчика, так и осветительного средства. Средство может быть расположено между или на предварительно определенном расстоянии от одного или нескольких датчиков и одного или нескольких осветительных средств (например, первого и второго осветительных средств). Средство может включать в себя модуль, такой как модуль внимания, который может включать в себя одно или несколько из источника света, экрана, метки, маркировки, дисплея, подвижной части или любой их комбинации. Это средство иногда может называться средством направления взгляда или механизмом зрительного контакта. Механизм зрительного контакта может содержать усеченный полый конус или другую 3D-фигуру, находящуюся в или на устройстве получения биометрических характеристик, причем ось полого конуса или другой 3D-формы указывает на пользователя. Ввиду параллакса между видимым дальним краем и видимым ближним краем конуса или другой 3D-формы дальний и ближний края воспринимаются как концентрические только при взгляде непосредственно вдоль оси конуса или другой 3D-формы, благодаря чему обеспечивается средство для управления конкретным углом, под которым пользователь смотрит на позицию взгляда, которая в свою очередь определяет линию между глазом и средством направления взгляда. Зеркало, расположенное в позиции взгляда в некотором конкретном направлении, также имеет свойство определения и позиции взгляда, и направления взгляда, регулируемых углом зеркала, когда пользователь имеет возможность наблюдать свой глаз в зеркале. Это зеркало может совпадать по местоположению или находиться возле датчика, чтобы уменьшить место на устройстве, но наклонено на некоторый угол для обеспечения того, что движение пользователя относительно датчика непараллельно оптической оси датчика.
В различных вариантах осуществления первый датчик (и/или дополнительные датчики) и первое осветительное средство (и/или дополнительные осветительные средства) могут находиться где угодно на системе или устройстве получения биометрических характеристик. Первый датчик (и/или дополнительные датчики) может быть расположен выше и/или сбоку относительно первого осветительного средства (и/или дополнительных осветительных средств). Первое осветительное средство (и/или дополнительные осветительные средства) расположено ниже и/или сбоку, соответственно. Такая компоновка может препятствовать теням от ресниц с верхних век вырисовываться или падать на радужную оболочку или область, представляющую интерес. Это может обеспечивать преимущества, поскольку оптическая ось датчика может больше не быть параллельной движению пользователя, когда они перемещаются ближе друг к другу, что увеличивает величину параллакса, возникающего в результате движения относительного движения, благодаря чему увеличивается вероятность того, что текстура радужной оболочки может открываться под очковой оптикой по меньшей мере один раз в последовательности получения изображений. Соответственно, некоторые варианты осуществления системы получения биометрических характеристик могут обеспечивать то, что направление движения соответствующего объекта относительно первого датчика непараллельно или отклоняется от оптической оси первого датчика.
Со ссылкой на (205), первый датчик может получать, за предварительно определенное время от получения первого изображения, второе изображение глаза, в то время как глаз находится во второй позиции и освещен первым осветительным средством. Второе изображение может включать в себя область, представляющую интерес. Первый датчик может получать второе изображение глаза, в то время как глаз находится в относительном движении с первым датчиком. Первый датчик может получать второе изображение глаза, когда глаз имеет второе, другое положение или направление взгляда относительно первого датчика. Первый датчик может получать второе изображение глаза, когда глаз находится в большей близости к или дальше от первого датчика.
В некоторых вариантах осуществления второй датчик получает третье изображение глаза во время освещения первым осветительным средством, например, подобно рассмотренному выше в связи с (105). Второй датчик может быть смещен по вертикали относительно первого датчика. Второй датчик может получать, за предварительно определенное время от получения третьего изображения, четвертое изображение глаза во время освещения первым осветительным средством. Первый датчик может получать третье изображение глаза во время освещения вторым осветительным средством, например, подобно рассмотренному выше в связи с (105). Второе осветительное средство может быть расположено на предварительно определенном расстоянии от первого осветительного средства. Первый датчик может получать, за предварительно определенное время от получения первого изображения, третье изображение глаза во время освещения вторым осветительным средством. Второе осветительное средство может быть расположено на расстоянии по вертикали от первого осветительного средства.
Со ссылкой на (207), процессор изображений может определять, включает ли в себя по меньшей мере одно из первого и второго изображений артефакты, возникающие от одного или обоих из первого осветительного средства и очковой оптики, внутри области, представляющей интерес. Этап (207) может включать в себя любой из этапов, признаков или обработок, описанных выше в связи с (107).
Со ссылкой на (209), и более подробно, процессор изображений может выбирать, на основе определения, по меньшей мере часть области, представляющей интерес, с одного или обоих из первого и второго изображений для использования в биометрической верификации. Этап (209) может включать в себя любой из этапов, признаков или обработок, описанных выше в связи с (107) и фиг. 26-27, касающихся обработки одного или нескольких изображений. Например, процессор изображений может выбирать, на основе определения, по меньшей мере часть области, представляющей интерес, с одного или обоих из первого и второго изображений для использования в биометрической верификации. Процессор изображений может комбинировать выбранную упомянутую по меньшей мере часть области, представляющей интерес, для биометрической верификации. Процессор изображений может определять, включает ли в себя по меньшей мере одно из первого и второго изображений зеркальное отражение от очковой оптики внутри области, представляющей интерес, причем зеркальное отражение возникает от первого осветительного средства. Процессор изображений может определять, включает ли в себя по меньшей мере одно из первого и второго изображений по меньшей мере одно из: препятствия от нелинзовой части очковой оптики, нарушения непрерывности в линзе очковой оптики и искажения от края линзы.
Теперь, после описания конкретных вариантов осуществления способов и систем, специалисту в данной области техники будет ясно, что могут быть использованы другие варианты осуществления, включающие в себя концепции изобретения. Следует понимать, что системы, описанные выше, могут обеспечивать множество любых или каждый из этих компонентов, и эти компоненты могут быть обеспечены либо на отдельной машине, либо, в некоторых вариантах осуществления, на множестве машин в распределенной системе. Системы и способы, описанные выше, могут осуществляться в качестве способа, устройства или промышленного изделия с использованием методик программирования и/или инженерии для создания программных средств, программно-аппаратных средств, аппаратных средств или любой их комбинации. Дополнительно, системы и способы, описанные выше, могут быть обеспечены в виде одной или нескольких машиночитаемых программ, осуществленных на или в одном или нескольких промышленных изделиях. Термин "промышленное изделие", используемый здесь, предназначен для охватывания кода или логического узла, доступного с и встроенного в один или несколько машиночитаемых устройств, программно-аппаратных средств, программируемых логических схем, устройств памяти (например, EEPROM, ROM, PROM, RAM, SRAM и т.д.), аппаратных средств (например, кристалл интегральной цепи, программируемая пользователем вентильная матрица (FPGA), специализированная интегральная цепь (ASIC) и т.д.), электронных устройств, машиночитаемого энергонезависимого блока хранения (например, CD-ROM, гибкий диск, накопитель на жестких дисках и т.д.). Промышленное изделие может быть доступно с файлового сервера, обеспечивающего доступ к машиночитаемым программам по сетевой линии передачи, среде беспроводной передачи, сигналам, распространяющимся через пространство, радиоволнам, инфракрасным сигналам и т.д. Промышленным изделием может быть карта флэш-памяти или магнитная лента. Промышленное изделие включает в себя аппаратные логические средства, а также программные средства или программируемый код, встроенный в машиночитаемый носитель, который исполняется процессором. В общем, машиночитаемые программы могут осуществляться на любом языке программирования, таком как LISP, PERL, C, C++, C#, PROLOG или на любом языке байт-кода, таком как JAVA. Программы программных средств могут храниться на или в одном или нескольких промышленных изделиях в виде объектного кода.









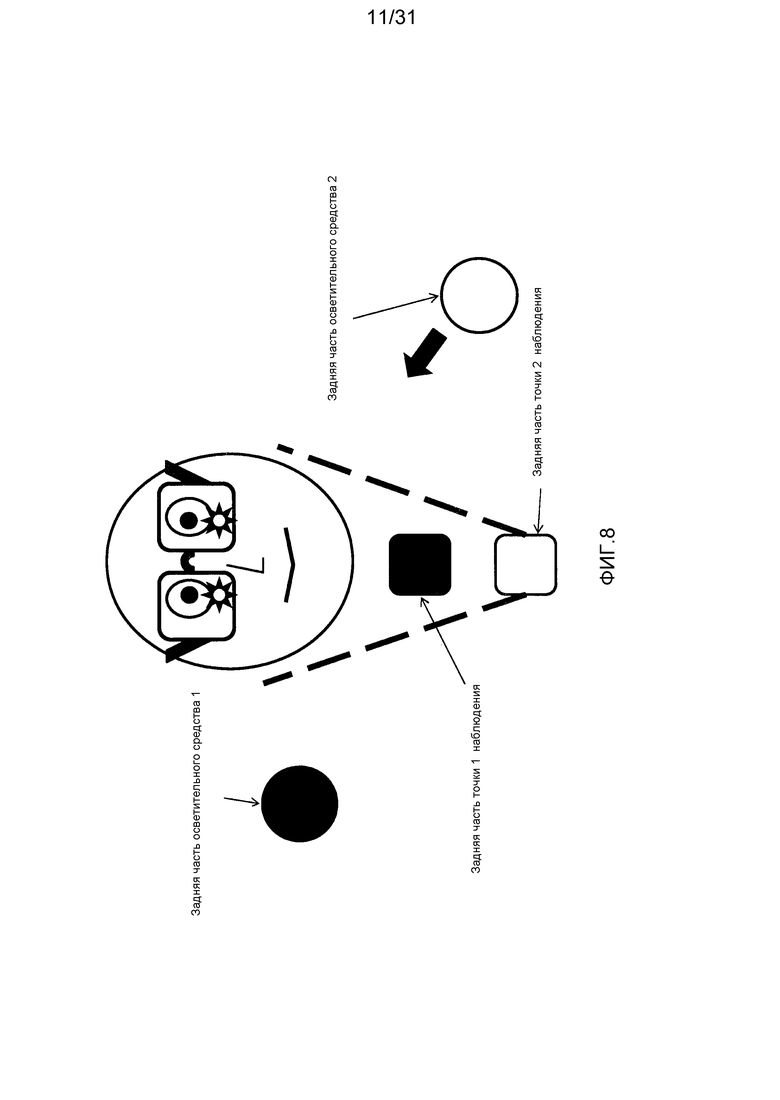


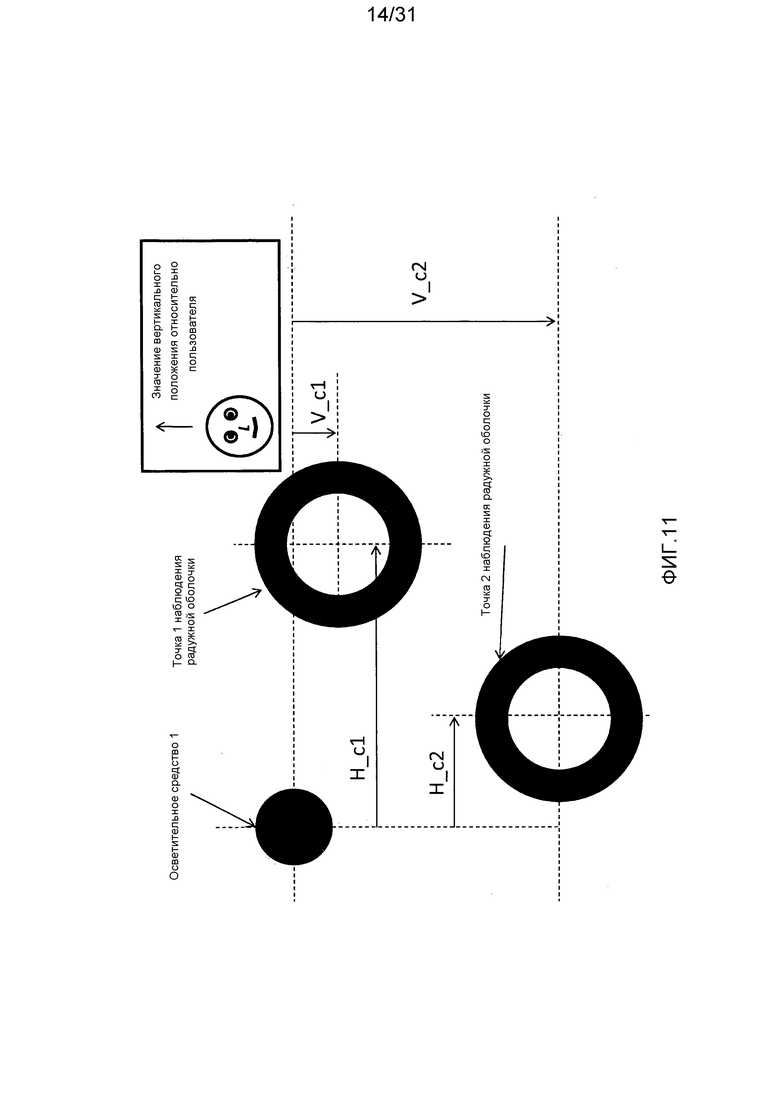



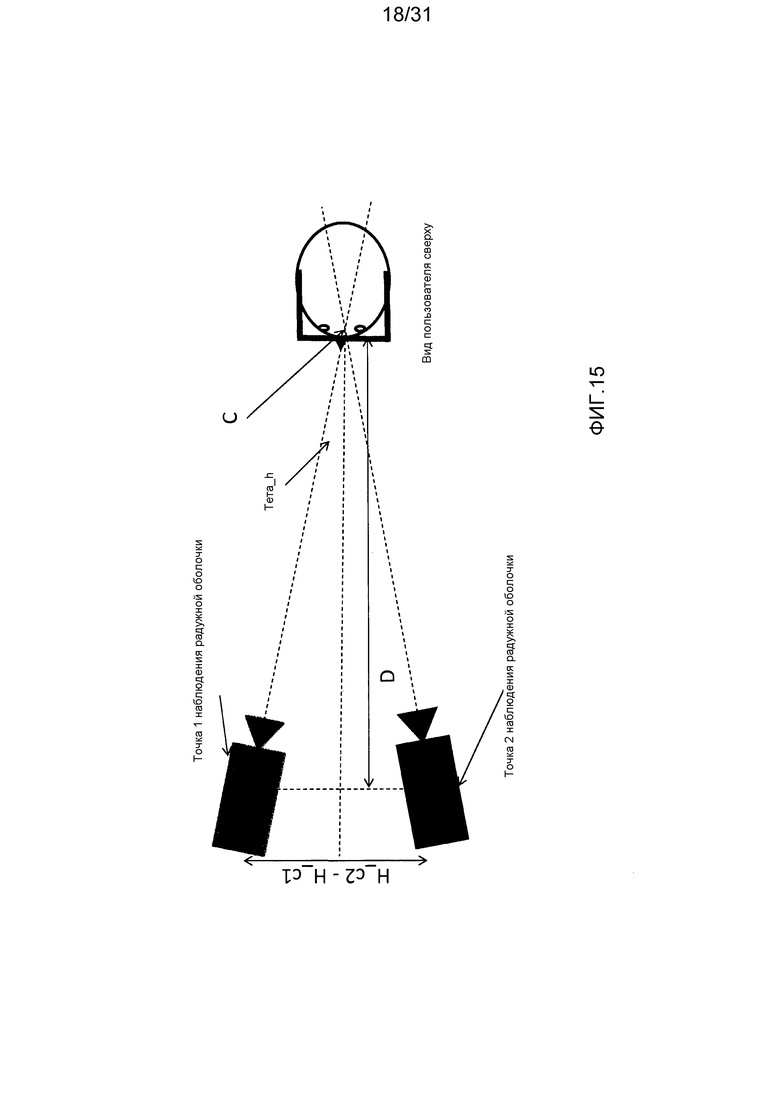

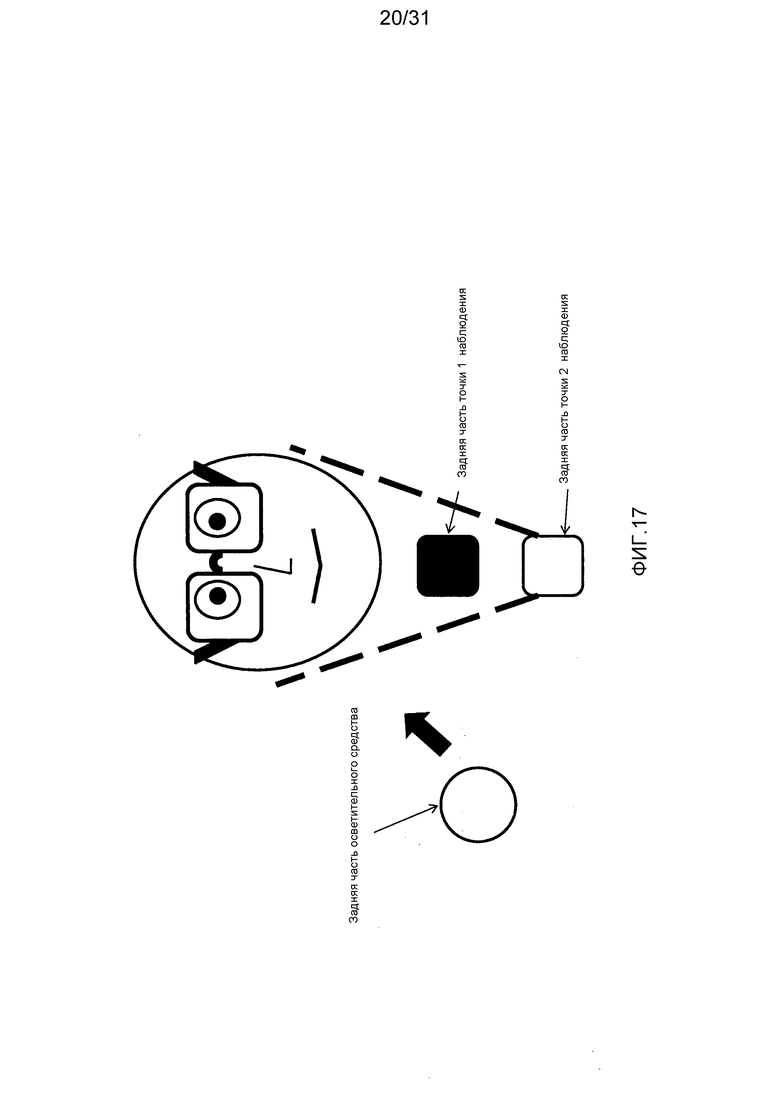

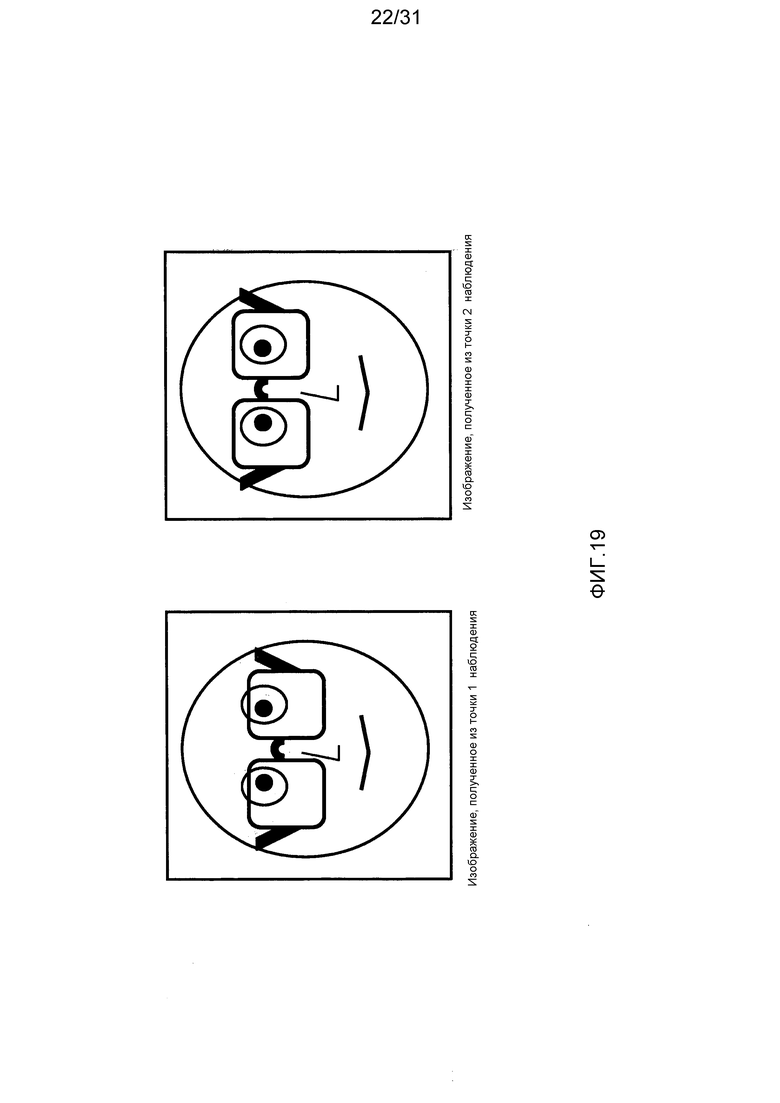

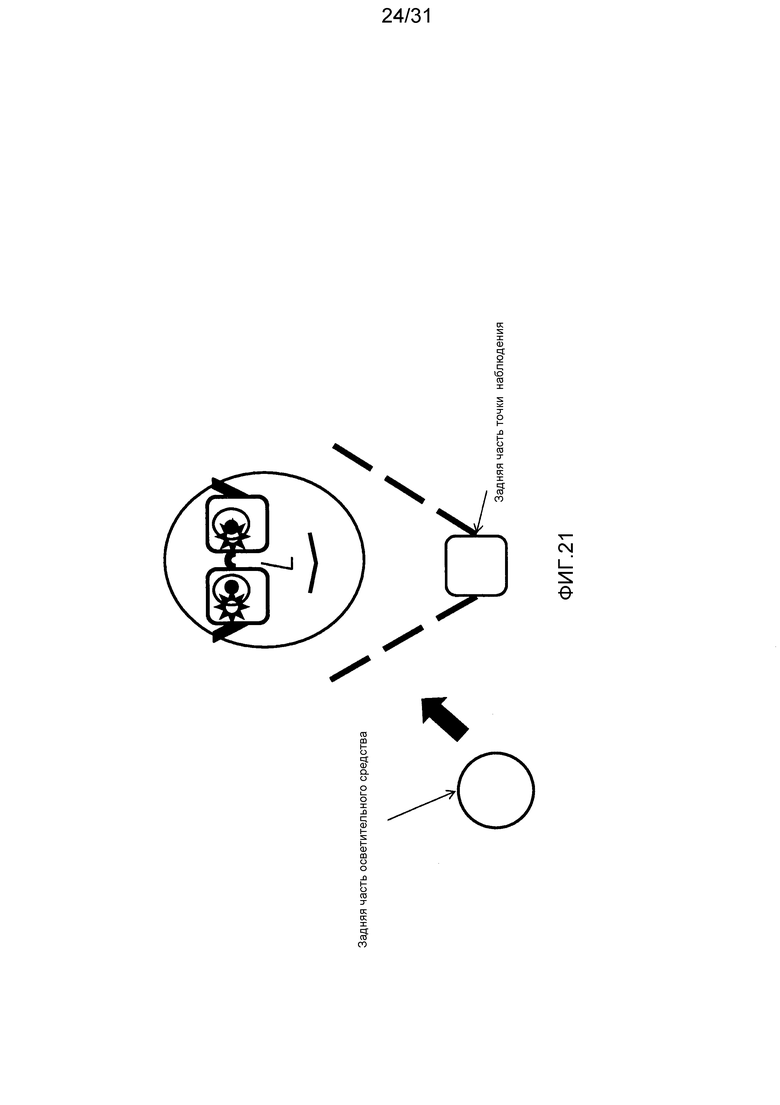



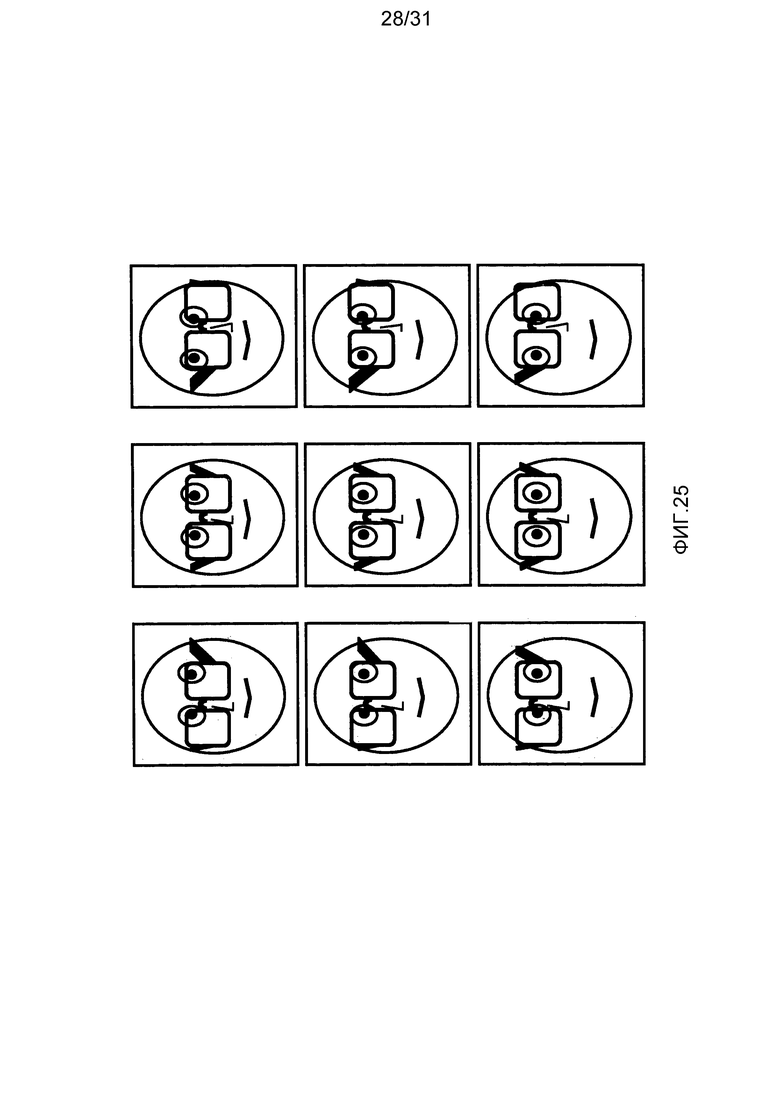

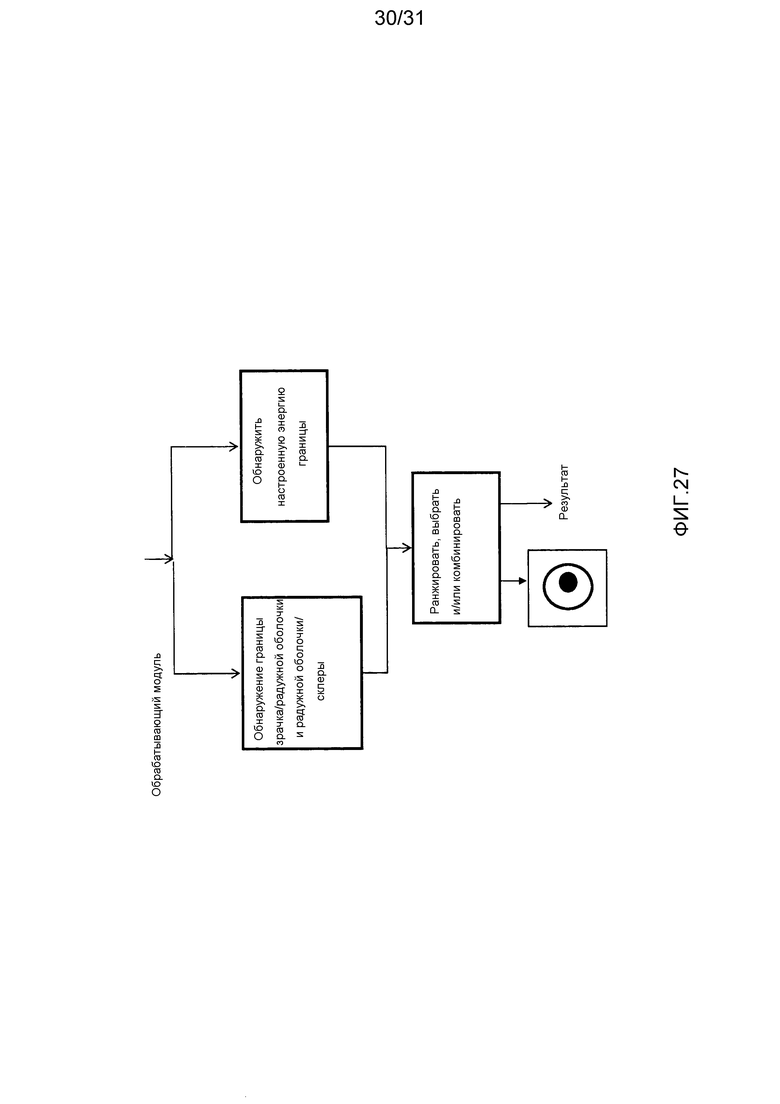

Изобретение относится к технологиям проверки идентичности. Технический результат - получение безартефактных биометрических изображений глаза. Способ включает в себя получение, посредством первого датчика, первого изображения глаза, в то время как глаз освещен первым осветительным средством, и выделение области, представляющей интерес. При этом первый датчик расположен на фиксированном смещении от первого осветительного средства и второго датчика. Второй датчик обеспечивает получение за предварительно определенный период времени от получения первого изображения второго изображения глаза, в котором выделяют область, представляющую интерес. Процессор изображений выполнен с возможностью определять, включает ли в себя по меньшей мере одно из первого и второго изображений артефакты, возникающие от одного или обоих из первого осветительного средства и очковой оптики, внутри области, представляющей интерес. 3 н. и 33 з.п. ф-лы, 31 ил.
1. Способ получения безартефактных биометрических изображений глаза при относительном движении относительно датчика и при наличии частично-отражающей очковой оптики, содержащий этапы, на которых:
(a) получают, посредством первого датчика, первое изображение глаза, пока глаз освещают первым осветительным средством, причем первое изображение включает в себя область, представляющую интерес, причем первый датчик расположен с фиксированным смещением от первого осветительного средства и второго датчика;
(b) получают, посредством второго датчика в течение некоторого предварительно определенного периода времени с момента получения первого изображения, второе изображение глаза, причем второе изображение включает в себя упомянутую область, представляющую интерес;
(c) определяют, включает ли в себя по меньшей мере одно из первого и второго изображений артефакты, возникающие вследствие очковой оптики, которые содержат препятствие от нелинзовой части очковой оптики, нарушение непрерывности в линзе очковой оптики и искажение от края линзы очковой оптики внутри упомянутой области, представляющей интерес; и
(d) выбирают, на основе упомянутого определения, по меньшей мере часть упомянутой области, представляющей интерес, которая не имеет артефактов, из одного или обоих первого и второго изображений для использования при биометрической верификации.
2. Способ по п. 1, в котором (а) содержит этап, на котором получают, посредством первого датчика, первое изображение глаза во время его освещения первым осветительным средством, причем первый датчик смещен по вертикали относительно второго датчика.
3. Способ по п. 1, в котором (b) содержит этап, на котором получают, посредством второго датчика одновременно с получением первого изображения, второе изображение глаза, причем второе изображение включает в себя упомянутую область, представляющую интерес.
4. Способ по п. 1, дополнительно содержащий этап, на котором получают, посредством первого датчика, третье изображение глаза во время его освещения вторым осветительным средством, причем второе осветительное средство расположено на некотором предварительно определенном расстоянии от первого осветительного средства.
5. Способ по п. 1, дополнительно содержащий этап, на котором получают, посредством первого датчика в течение некоторого предварительно определенного времени с момента получения первого изображения, третье изображение глаза во время его освещения вторым осветительным средством, причем второе осветительное средство расположено на некотором расстоянии по вертикали от упомянутого первого осветительного средства.
6. Способ по п. 5, дополнительно содержащий этап, на котором получают, посредством второго датчика, четвертое изображение глаза во время его освещения вторым осветительным средством.
7. Способ по п. 1, дополнительно содержащий этап, на котором размещают первый и второй датчики так, чтобы оптические оси первого и второго датчиков сходились на, по существу, номинальном расстоянии D между глазом и датчиками.
8. Способ по п. 7, дополнительно содержащий этап, на котором наклоняют первый и второй датчик на угол тета относительно линии, соединяющей глаз и срединную точку между первым и вторым датчиками, согласно тета = arctg(0,5*S/D), при этом S - расстояние разнесения между первым и вторым датчиками и D - расстояние от глаза до срединной точки между первым и вторым датчиками.
9. Способ по п. 1, дополнительно содержащий этап, на котором выбирают на основе упомянутого определения, по меньшей мере часть упомянутой области, представляющей интерес, из одного или обоих из первого и второго изображений для использования при биометрической верификации.
10. Способ по п. 9, дополнительно содержащий этап, на котором объединяют выбранную упомянутую по меньшей мере часть области, представляющей интерес, для биометрической верификации.
11. Способ по п. 1, в котором (с) содержит этап, на котором определяют, включает ли в себя по меньшей мере одно из первого и второго изображений зеркальное отражение от очковой оптики внутри упомянутой области, представляющей интерес, причем зеркальное отражение возникает от первого осветительного средства.
12. Способ по п. 1, в котором (с) содержит этап, на котором определяют, включает ли в себя по меньшей мере одно из первого и второго изображений по меньшей мере одно из: препятствия от нелинзовой части очковой оптики, нарушения непрерывности в линзе очковой оптики и искажения от края линзы.
13. Система получения безартефактных биометрических изображений глаза при относительном движении относительно датчика и при наличии частично-отражающей очковой оптики, причем система содержит:
первое осветительное средство;
первый датчик и второй датчик, причем первый датчик получает первое изображение глаза во время его освещения первым осветительным средством, причем первое изображение включает в себя область, представляющую интерес, причем первый датчик расположен с фиксированным смещением от первого осветительного средства и второго датчика, причем второй датчик получает второе изображение глаза в течение некоторого предварительно определенного периода времени с момента получения первого изображения, причем второе изображение включает в себя упомянутую область, представляющую интерес; и
процессор изображений, определяющий, включает ли в себя по меньшей мере одно из первого и второго изображений артефакты, возникающие вследствие очковой оптики, которые содержат препятствие от нелинзовой части очковой оптики, нарушение непрерывности в линзе очковой оптики и искажение от края линзы очковой оптики внутри упомянутой области, представляющей интерес, и выбирающий, на основе упомянутого определения, по меньшей мере часть упомянутой области, представляющей интерес, которая не имеет артефактов, из одного или обоих первого и второго изображений для использования при биометрической верификации.
14. Система по п. 13, в которой первый датчик смещен по вертикали относительно второго датчика.
15. Система по п. 13, в которой второй датчик получает, одновременно с получением первого изображения, второе изображение глаза.
16. Система по п. 13, в которой первый датчик получает третье изображение глаза во время его освещения вторым осветительным средством, причем второе осветительное средство расположено на некотором предварительно определенном расстоянии от первого осветительного средства.
17. Система по п. 13, дополнительно содержащая второе осветительное средство, причем первый датчик получает в течение некоторого предварительно определенного времени с момента получения первого изображения, третье изображение глаза во время его освещения вторым осветительным средством, причем второе осветительное средство расположено на некотором расстоянии по вертикали от упомянутого первого осветительного средства.
18. Система по п. 17, в которой второй датчик получает четвертое изображение глаза во время его освещения вторым осветительным средством.
19. Система по п. 13, в которой первый и второй датчики размещены так, чтобы оптические оси первого и второго датчиков сходились на, по существу, номинальном расстоянии D между глазом и датчиками.
20. Система по п. 19, в которой первый и второй датчики размещены так, чтобы оптические оси первого и второго датчиков были наклонены на угол тета относительно линии, соединяющей глаз и срединную точку между первым и вторым датчиками, согласно тета = arctg(0,5*S/D), где S - расстояние разнесения между первым и вторым датчиками, a D - расстояние от глаза до срединной точки между первым и вторым датчиками.
21. Система по п. 13, в которой процессор изображений выбирает, на основе упомянутого определения, по меньшей мере часть области, представляющей интерес, из одного или обоих первого и второго изображений для использования при биометрической верификации.
22. Система по п. 21, в которой процессор изображений объединяет выбранную упомянутую по меньшей мере часть области, представляющей интерес, для биометрической верификации.
23. Система по п. 13, в которой процессор изображений определяет, включает ли в себя по меньшей мере одно из первого и второго изображений зеркальное отражение от очковой оптики внутри упомянутой области, представляющей интерес, причем зеркальное отражение возникает от первого осветительного средства.
24. Система по п. 13, в которой процессор изображений определяет, включает ли в себя по меньшей мере одно из первого и второго изображений по меньшей мере одно из: препятствия от нелинзовой части очковой оптики, нарушения непрерывности в линзе очковой оптики и искажения от края линзы.
25. Способ получения безартефактных биометрических изображений глаза при относительном движении относительно датчика и при наличии частично-отражающей очковой оптики, содержащий этапы, на которых:
(а) получают, посредством первого датчика, первое изображение глаза, пока глаз находится в первой позиции относительно датчика и освещается первым осветительным средством, причем первое изображение включает в себя область, представляющую интерес, причем первый датчик расположен с фиксированным смещением от первого осветительного средства;
(b) получают, посредством первого датчика в течение некоторого предварительно определенного времени с момента получения первого изображения, второе изображение глаза, пока глаз находится во второй позиции и освещается первым осветительным средством, причем второе изображение включает в себя упомянутую область, представляющую интерес;
(c) определяют, включает ли в себя по меньшей мере одно из первого и второго изображений артефакты, возникающие вследствие очковой оптики, которые содержат препятствие от нелинзовой части очковой оптики, нарушение непрерывности в линзе очковой оптики и искажение от края линзы очковой оптики внутри упомянутой области, представляющей интерес; и
(d) выбирают, на основе упомянутого определения, по меньшей мере часть области, представляющей интерес, которая не имеет артефактов, из одного или обоих первого и второго изображений для использования при биометрической верификации.
26. Способ по п. 25, дополнительно содержащий этап, на котором получают, посредством второго датчика, третье изображение глаза во время его освещения первым осветительным средством, причем второй датчик смещен по вертикали относительно первого датчика.
27. Способ по п. 26, дополнительно содержащий этап, на котором получают, посредством второго датчика, в течение некоторого предварительно определенного времени с момента получения третьего изображения, четвертое изображение глаза во время его освещения первым осветительным средством.
28. Способ по п. 25, дополнительно содержащий этап, на котором получают посредством первого датчика третье изображение глаза во время его освещения вторым осветительным средством, причем второе осветительное средство расположено на некотором предварительно определенном расстоянии от первого осветительного средства.
29. Способ по п. 25, дополнительно содержащий этап, на котором получают, посредством первого датчика в течение предварительно определенного времени с момента получения первого изображения, третье изображение глаза во время его освещения вторым осветительным средством, причем второе осветительное средство расположено на некотором расстоянии по вертикали от первого осветительного средства.
30. Способ по п. 25, дополнительно содержащий выбор, на основе упомянутого определения, по меньшей мере части упомянутой области, представляющей интерес, из одного или обоих первого и второго изображений для использования при биометрической верификации.
31. Способ по п. 30, дополнительно содержащий этап, на котором объединяют выбранную упомянутую по меньшей мере часть области, представляющей интерес, для биометрической верификации.
32. Способ по п. 25, в котором (с) содержит этап, на котором определяют, включает ли в себя по меньшей мере одно из первого и второго изображений зеркальное отражение от очковой оптики внутри упомянутой области, представляющей интерес, причем зеркальное отражение возникает от первого осветительного средства.
33. Способ по п. 25, в котором (с) содержит этап, на котором определяют, включает ли в себя по меньшей мере одно из первого и второго изображений по меньшей мере одно из: препятствия от нелинзовой части очковой оптики, нарушения непрерывности в линзе очковой оптики и искажения от края линзы.
34. Способ по п. 25, дополнительно содержащий этап, на котором обеспечивают, чтобы направление движения соответствующего объекта по отношению к первому датчику было непараллельным оптической оси первого датчика.
35. Способ по п. 25, дополнительно содержащий этап, на котором направляют посредством модуля, расположенного на некотором предварительно определенном расстоянии от первого датчика, направление взгляда глаза так, чтобы оптическая ось первого датчика была, по существу, непараллельной относительно этого направления взгляда.
36. Способ по п. 25, дополнительно содержащий этап, на котором размещают первое осветительное средство так, чтобы первое осветительное средство было расположено по вертикали ниже первого датчика.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| RU 2005133866 A, 10.05.2007 | |||
| СПОСОБ И СИСТЕМА ДЛЯ ИДЕНТИФИКАЦИИ ЧЕЛОВЕКА ПО ИЗОБРАЖЕНИЮ ЛИЦА | 2007 |
|
RU2382408C2 |

