Изобретение относится к области радиосвязи и радиолокации и можетт быть использовано для амплитудной, фазовой и амплитудно-фазовой модуляции или манипуляции высокочастотных сигналов.
Известен способ манипуляции (модуляции) параметров отраженного сигнала, состоящий в том, что входное сопротивление устройства манипуляции изменяют таким образом, что коэффициент отражения этого устройства изменяет фазу на π, π/2, π/4, причем для разделения входного и отраженного сигналов используют циркулятор [Радиопередающие устройства. / Под редакцией О.А. Челнокова - М.: Радио и связь, 1982, стр. 152-156]. Известно устройство реализации этого способа [там же], состоящее из циркулятора, первый вход которого подключен к источнику сигнала, третий вход подключен к нагрузке, а второй подключен к отрезку разомкнутой линии передачи длиной λ/4, в начале которой включен p-i-n-диод.
Если диод закрыт, то от сечения, в котором он включен, происходит отражение, отраженная волна попадает в нагрузку с сопротивлением 50 Ом. Если диод открыт, то отражение происходит от конца линии. Фаза отраженного сигнала в одном состоянии диода отличается от фазы отраженного сигнала в другом состоянии диода на π радиан. При необходимости изменения разности фаз длина отрезка линии передачи изменяется соответствующим образом.
Недостатком этого способа и устройства его реализации является то, что в двух состояниях диода изменяется только фаза отраженного сигнала, причем заданные значения разности фаз отраженного сигнала в двух состояниях диода обеспечиваются только на одной фиксированной частоте. Другим недостатком является постоянство амплитуды отраженного сигнала в двух состояниях диода, то есть отсутствие манипуляции амплитуды, что сужает функциональные возможности. Например, это не позволяет обеспечить два канала радиосвязи на одной несущей частоте (один канал можно образовать с помощью манипуляции амплитуды, а другой с помощью манипуляции фазы или не позволяет обеспечить кодировку передаваемой информации). Третьим недостатком следует считать большие массы и габариты, связанные с необходимостью использования отрезков линии передачи. Следующим важным недостатком является то, что данный способ и данное устройство не обеспечивают манипуляцию (модуляцию) амплитуды и фазы проходного сигнала. Основным недостатком является отсутствие возможности обеспечения манипуляции (модуляции) амплитуды и фазы проходного сигнала в заданной полосе частот при произвольных частотных характеристиках нагрузки.
Известен способ манипуляции фазы отраженного сигнала, основанный на использовании двухимпедансных устройств СВЧ [В.Г. Соколинский, В.Г. Шейнкман. Частотные и фазовые модуляторы и манипуляторы. - M.: Радио и связь, 1983, стр. 146-158]. Известно устройство реализации этого способа [там же], состоящее из определенного количества реактивных элементов типа L, C, параметры которых выбраны из условия обеспечения требуемой произвольной разности фаз коэффициента отражения.
По сравнению с предыдущим способом и устройством данный способ и устройство его реализации не требуют использования полупроводниковых диодов только в открытом и только закрытом состояниях. При любых состояниях диодов, определяемых двумя уровнями низкочастотного управляющего воздействия, при определенных значениях параметров типа L, С может быть обеспечено заданное значение разности фаз отраженного сигнала на фиксированной частоте. Если амплитуда управляющего низкочастотного сигнала между указанными двумя уровнями изменяется непрерывно, то обеспечивается модуляция.
Основным недостатком (как и в первом способе и устройстве) является отсутствие возможности одновременного обеспечения манипуляции (модуляции) амплитуды и фазы проходного сигнала в заданной полосе частот при произвольных частотных характеристиках нагрузки.
Наиболее близким по технической сущности и достигаемому результату (прототипом) является способ [Головков А.А. Устройство для модуляции отраженного сигнала. Авт. св-во №1800579 от 09.10 1992 года], состоящий в том, что неуправляемую часть (согласующе-фильтрующее устройство) формируют из определенным образом соединенных между собой двухполюсников, сопротивление каждого двухполюсника выбирают из условия обеспечения одинакового заданного двухуровневого закона изменения амплитуды и фазы отраженного сигнала при изменении управляемого элемента из одного состояния в другое под действием управляющего низкочастотного напряжения или тока.
Известно устройство (прототип) реализации способа [там же], содержащее циркулятор, первое и третье плечи которого являются СВЧ-входом и выходом, а во второе плечо включены реактивный четырехполюсник и полупроводниковый диод, подключенный к источнику низкочастотного управляющего воздействия, при этом четырехполюсник выполнен в виде T-образного соединения двухполюсников со значениями реактивных сопротивлений, которые выбраны из условия обеспечения требуемых законов двухуровневого изменения амплитуды и фазы отраженного сигнала на двух заданных частотах. Так же как и в предыдущих способе и устройстве реализации, возможна модуляция фазы и амплитуды, если управляющий сигнал изменяется непрерывно.
Основным недостатком (как и в предыдущих способах и устройствах) является отсутствие возможности одновременного обеспечения манипуляции (модуляции) амплитуды и фазы проходного сигнала в заданной полосе частот по заданному закону при произвольных частотных характеристиках нагрузки. Следующим важным недостатком всех перечисленных способов и устройств является то, что все элементы четырехполюсников выполнены реактивными, что связано со стремлением разработчиков не вносить дополнительных потерь путем использования комплексных двухполюсников на основе как реактивных, так и резистивных элементов. При использовании в согласующих устройствах только реактивных или только резистивных элементов не всегда удается обеспечить условия согласования по критерию обеспечения требуемого отношения модулей и требуемой разности фаз коэффициентов передачи в двух состояниях управляемого нелинейного элемента, определяемых двумя уровнями низкочастотного управляющего сигнала, поскольку они имеют определенные области физической реализуемости (области изменения действительной и мнимой составляющих сопротивлений источника сигнала и нагрузки), в пределах которых реализуются эти условия согласования (Головков А.А. Комплексированные радиоэлектронные устройства. М.: Радио и связь, 1996. - 128 с.).
Техническим результатом изобретения является расширение областей физической реализуемости как областей изменения действительной и мнимой составляющих сопротивлений источника сигнала и нагрузки, в пределах которых одновременно обеспечивается модуляция амплитуды и фазы высокочастотного сигнала при заданных зависимостях отношения модулей и разности фаз передаточной функции модулятора в двух состояниях управляемого нелинейного элемента, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты в заданной полосе частот за счет оптимизации схемы и значений параметров комплексного четырехполюсника. Возможность изменения варианта включения нелинейного элемента относительно согласующего комплексного четырехполюсника еще более расширяет области физической реализуемости.
1. Указанный результат достигается тем, что в известном способе амплитудно-фазовой модуляции высокочастотного сигнала, состоящем в том, что высокочастотный сигнал подают на модулятор, выполненный из четырехполюсника, управляемого двухэлектродного нелинейного элемента, источника управляющего низкочастотного сигнала и нагрузки, амплитуду и фазу высокочастотного сигнала изменяют путем изменения амплитуды управляющего низкочастотного сигнала на нелинейном элементе, дополнительно четырехполюсник выполняют комплексным из реактивных и резистивных элементов, выход источника высокочастотного сигнала подключают к входу четырехполюсника, нелинейный элемент включают в продольную цепь между выходом четырехполюсника и нагрузкой, заданные зависимости отношения модулей и разности фаз передаточной функции модулятора в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты и заданные зависимости модуля и фазы передаточной функции модулятора от амплитуды управляющего низкочастотного сигнала, непрерывно изменяемой в пределах от одного уровня управляющего низкочастотного сигнала до другого, в заданной полосе частот обеспечивают за счет выбора зависимости элемента z11 матрицы сопротивлений комплексного четырехполюсника от частоты с помощью следующего математического выражения:
где 
2. Указанный результат достигается тем, что в известном устройстве амплитудно-фазовой модуляции высокочастотного сигнала, состоящем из источника высокочастотного сигнала, четырехполюсника, двухэлектродного нелинейного элемента, источника управляющего низкочастотного сигнала и нагрузки, дополнительно четырехполюсник выполнен комплексным в виде Г-образного соединения двух комплексных двухполюсников, выход источника высокочастотного сигнала подключен к входу четырехполюсника, нелинейный элемент включен в продольную цепь между выходом четырехполюсника и нагрузкой, первый двухполюсник Г-образного соединения сформирован из последовательно соединенных первого резистивного двухполюсника с сопротивлением R1, конденсатора с емкостью С и параллельно соединенных между собой второго резистивного двухполюсника с сопротивлением R2 и катушки с индуктивностью L, значения параметров первого двухполюсника Г-образного соединения определены в соответствии со следующими математическими выражениями:




где 





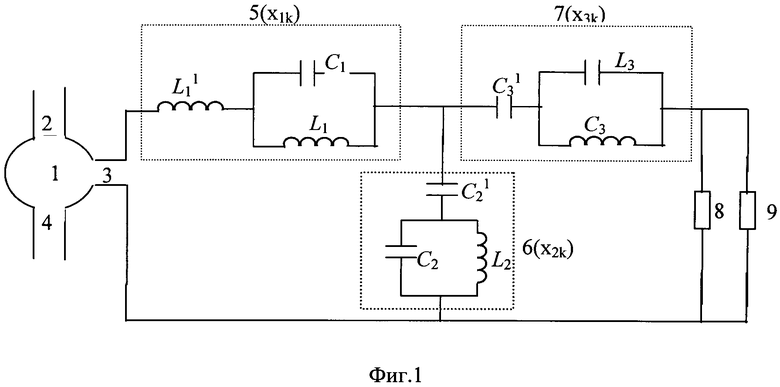
На фиг. 1 показана схема устройства модуляции амплитуды и фазы высокочастотных сигналов (прототип), реализующего способ-прототип.
На фиг. 2 показана структурная схема предлагаемого устройства по п. 2, реализующего предлагаемый способ по п. 1.
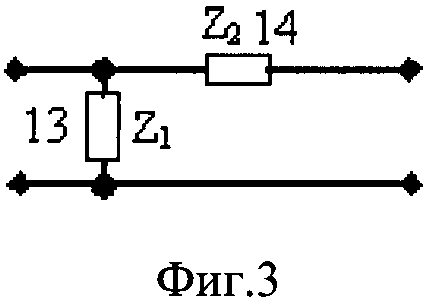
На фиг. 3 приведена схема комплексного четырехполюсника предлагаемого устройства по п. 2.
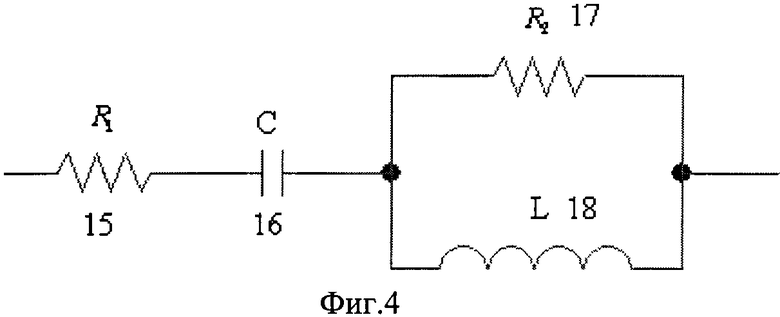
На фиг. 4 приведена схема первого комплексного двухполюсника, входящего в состав комплексного четырехполюсника предлагаемого устройства по п. 2
Устройство-прототип содержит циркулятор 1 с входным 2, нагрузочным 3 и выходным 4 плечами, четырехполюсник из трех двухполюсников с реактивными сопротивлениями x1k - 5, x2k - 6, x3k - 7, соединенных между собой по T-схеме, а также полупроводниковый диод 8, подключенный параллельно к источнику сигнала модуляции 9. Двухполюсник 7 подключен к диоду 8, двухполюсник 5 - к нагрузочному плечу 3 циркулятора 1.
Принцип действия устройства манипуляции и модуляции параметров сигнала (прототипа) состоит в следующем.
Высокочастотный сигнал от источника (на фигуре 1 не показан) через входное плечо 2 циркулятора 1 поступает в нагрузочное плечо (нагрузка не показана) 3. В результате взаимодействия пришедшего сигнала с реактивными элементами и диодом и благодаря специальному выбору значений реактивных элементов двухполюсников значения фаз и амплитуд отраженных сигналов на двух частотах оказываются такими, что в результате их интерференции на выходное плечо 4 циркулятора 1 поступают сигналы, амплитуда и фаза которых в одном состоянии диода 8, определяемом одним крайним значением сигнала модуляции источника 9, отличаются от амплитуды и фазы этих сигналов в другом состоянии диода 8 на заданные величины на соответствующих двух частотах. Максимальная девиация фазы может составлять 360°, минимальная - ноль, максимальное отношение амплитуд равно ∞. Отношения модулей и разности фаз коэффициента отражения реализуются на обеих частотах одинаковыми.
Основные недостатки этого способа и устройства описаны выше.
Структурная схема предлагаемого устройства по п. 2 (фиг. 2) состоит из двухэлектродного нелинейного элемента - 8 с сопротивлениями z1,2 в двух состояниях управляющего низкочастотного сигнала, источника управляющего низкочастотного сигнала - 9, источника высокочастотного сигнала с комплексным сопротивлением z0 - 10, комплексного четырехполюсника (КЧ)-11 и нагрузки с комплексным сопротивлением zн - 12. Комплексный четырехполюсник выполнен в виде Г-образного соединения двух комплексных двухполюсников (фиг. 3) с сопротивлениями Z1,2 - 13, 14. Частотные зависимости элемента матрицы сопротивлений z11 КЧ-11 и сопротивления первого комплексного двухполюсника Z1 - 13 выбираются из условия достижения технического результата, а сопротивление второго комплексного двухполюсника Z2 - 14 может быть выбрано произвольно или из каких-либо физических соображений. Источник сигнала, КЧ, нелинейный элемент в продольной цепи и нагрузка включены по каскадной схеме в порядке перечисления. Частотные зависимости элемента матрицы сопротивлений z11 КЧ-11 и сопротивления первого комплексного двухполюсника Z1 - 13 выбраны из условий обеспечения заданных зависимостей отношения модулей и разности фаз передаточной функции модулятора в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты и заданных зависимостей модуля и фазы передаточной функции модулятора от амплитуды управляющего низкочастотного сигнала, непрерывно изменяемой в пределах от одного уровня управляющего низкочастотного сигнала до другого (при этом уровни выбираются из условия реализации квазилинейного участка модуляционной характеристики), в заданной полосе частот. Реализация этой зависимости осуществлена первым комплексным двухполюсником - 13 комплексного четырехполюсника - 11 в виде последовательно соединенных первого резистивного двухполюсника с сопротивлением R1 - 15, конденсатора с емкостью С - 16 и параллельно соединенных между собой второго резистивного двухполюсника с сопротивлением R2 - 17 и катушки с индуктивностью L - 18, (фиг. 4), значения параметров которых выбраны из указанных условий с помощью определенных математических выражений.
Принцип действия данного устройства состоит в том, что при подаче несущего высокочастотного сигнала от источника 10 с сопротивлением z0 в результате специального выбора значений элементов первого комплексного двухполюсника - 13, комплексного четырехполюсника - 11 будут реализованы заданные зависимости отношения модулей и разности фаз передаточной функции модулятора в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты и заданные зависимости модуля и фазы передаточной функции модулятора от амплитуды управляющего низкочастотного сигнала, непрерывно изменяемой в пределах от одного уровня управляющего низкочастотного сигнала до другого, в заданной полосе частот. В результате возникают свойства формирования дискретных или аналоговых модулированных по амплитуде и фазе высокочастотных сигналов при увеличенных областях физической реализуемости как областей изменения действительной и мнимой составляющих сопротивлений источника сигнала и нагрузки, в пределах которых одновременно обеспечивается модуляция амплитуды и фазы высокочастотного сигнала при заданных зависимостях отношения модулей и разности фаз передаточной функции модулятора в двух состояниях управляемого нелинейного элемента, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты в заданной полосе частот.
Докажем возможность реализации указанных свойств.
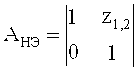
Пусть известны зависимости действительных составляющих комплексных сопротивлений нагрузки zн и источника высокочастотного сигнала z0 от частоты. Известна также зависимость комплексных сопротивлений двухполюсного управляемого нелинейного элемента z1,2 в двух состояниях, определяемых двумя уровнями амплитуды низкочастотного сигнала, от частоты. Здесь и далее аргумент (частота) для простоты опущен. Таким образом, нелинейный элемент характеризуется матрицей передачи:
Комплексный четырехполюсник (КЧ) описывается матрицей передачи:
где 
Общая нормированная классическая матрица передачи манипулятора (модулятора) получается путем перемножения матриц (2) и (1) с учетом условий нормировки:
Используя известную связь элементов матрицы рассеяния с элементами матрицы передачи и (3), получим выражение для коэффициента передачи манипулятора в двух состояниях диода:
Пусть требуется определить схему комплексного четырехполюсника и значения комплексных сопротивлений двухполюсников, входящих в него, при которых возможно обеспечить заданные зависимости отношения модулей m21 и разности фаз φ21 коэффициентов передачи в двух состояниях диода от частоты:

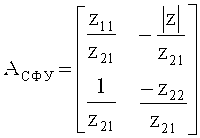
После подстановки (4) в (5) получим комплексное уравнение, решение которого имеет вид взаимосвязи между элементами искомой матрицы сопротивлений СФУ, оптимальной по критерию обеспечения заданного закона изменения параметров проходного сигнала (5) во всем частотном диапазоне:
где 
Полученная взаимосвязь (6) между элементами матрицы передачи комплексного четырехполюсника означает, что двухуровневые манипуляторы амплитуды и (или) фазы проходного сигнала должны содержать не менее одного независимого двухполюсника с комплексным сопротивлением, значение которого должно удовлетворять уравнению, сформированному на основе этой взаимосвязи. Для отыскания оптимальных значений параметров комплексного четырехполюсника необходимо выбрать какую-либо схему из M≥1 двухполюсника с комплексным сопротивлением, найти ее матрицу сопротивлений, элементы которой выражены через параметры схемы комплексного четырехполюсника, и подставить их в (6). Сформированное таким образом уравнение должно быть решено относительно сопротивления выбранного комплексного двухполюсника. Значения параметров остальных M-1 комплексных двухполюсников могут быть заданы произвольно или выбраны из каких-либо других физических соображений. В соответствии с описанным алгоритмом получена оптимальная по критерию (5) зависимость сопротивления первого комплексного двухполюсника Г-образного соединения двух комплексных двухполюсников (фиг. 3) от частоты.

где n=1, 2… - номера частот интерполяции. Сопротивление Z2n может быть выбрано произвольно или исходя из каких-либо других физических соображений. Индекс n необходимо ввести и в другие обозначения физических величин, явным образом зависящих от частоты. При частотной характеристике (7) первого комплексного двухполюсника Г-образного соединения обеспечивались бы заданные зависимости отношения модулей m21 и разности фаз φ21 коэффициентов передачи в двух состояниях диода от частоты на всем спектре частот. Однако реализация (7) в сплошной, даже очень узкой полосе частот, невозможна.
Для реализации оптимальной аппроксимации (7) на конечном числе частот методом интерполяции необходимо сформировать двухполюсник с сопротивлением Z1n из не менее чем 2N (N - число частот интерполяции) элементов типа R, L, C, найти выражения для их сопротивлений, приравнять их к оптимальным значениям сопротивлений двухполюсника на заданных частотах, определенным по формулам (7), и решить сформированную таким образом систему 2N уравнений относительно 2N выбранных параметров R, L, C. Значения параметров остальных элементов могут быть выбраны произвольно или исходя из каких-либо других физических соображений, например из условия физической реализуемости. Пусть первый двухполюсник КЧ с сопротивлением Z1n сформирован из последовательно соединенных первого резистивного двухполюсника с сопротивлением R1, конденсатора с емкостью C и параллельно соединенных между собой второго резистивного двухполюсника с сопротивлением R2 и катушки с индуктивностью L (фиг. 4). Комплексное сопротивление первого двухполюсника КЧ:
Разделим в (8) между собой действительную и мнимую части и для N=2 составим систему четырех уравнений:

Решение:









Реализация оптимальных аппроксимаций частотных характеристик КЧ (6) с помощью Г-образного соединения двух комплексных двухполюсников и частотных характеристик первого комплексного двухполюсника (7) этого соединения с помощью (8), (10) обеспечивает увеличение полосы частот, в пределах которой с определенными отклонениями обеспечиваются заданные зависимости отношения модулей m21 и разности фаз φ21 коэффициентов передачи в двух состояниях диода от частоты (5). Это позволяет при разумном выборе положений заданных частот ω1, ω2 относительно друг друга расширить полосу частот, в пределах которой обеспечиваются заданные зависимости отношения модулей и разности фаз передаточной функции модулятора в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты и заданные зависимости модуля и фазы передаточной функции модулятора от амплитуды управляющего низкочастотного сигнала, непрерывно изменяемой в пределах от одного уровня управляющего низкочастотного сигнала до другого, в заданной полосе частот. При разумном выборе обоих уровней амплитуды управляющего сигнала при этом будут сформированы квазилинейные участки фазовой и амплитудной модуляционных характеристик для осуществления режима модуляции. Переменное использование обоих уровней обеспечивает режим манипуляции. Частотные характеристики сопротивлений источника сигнала и нагрузки могут быть заданы любыми.
Предлагаемые технические решения являются новыми, поскольку из общедоступных сведений неизвестны способ и устройство амплитудно-фазовой модуляции, обеспечивающие заданные зависимости отношения модулей и разности фаз передаточной функции модулятора в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты и заданные зависимости модуля и фазы передаточной функции модулятора от амплитуды управляющего низкочастотного сигнала, непрерывно изменяемой в пределах от одного уровня управляющего низкочастотного сигнала до другого (при этом уровни выбираются из условия реализации квазилинейного участка модуляционной характеристики), в заданной полосе частот за счет специального выбора частотной зависимости элемента z11 матрицы сопротивлений комплексного четырехполюсника, реализуемой выполнением этого четырехполюсника в виде Г-образного соединения двух комплексных двухполюсников, формированием первого комплексного двухполюсника Г-образного соединения из последовательно соединенных первого резистивного двухполюсника с сопротивлением R1, конденсатора с емкостью С и параллельно соединенных между собой второго резистивного двухполюсника с сопротивлением R2 и катушки с индуктивностью L и выбором указанных параметров по соответствующим математическим выражениям.
Предлагаемые технические решения имеют изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций (выполнение четырехполюсника комплексным в виде указанной выше схемы, включение двухполюсного нелинейного элемента между четырехполюсником и нагрузкой в продольную цепь, реализация оптимальной частотной зависимости элемента z11 матрицы сопротивлений комплексного четырехполюсника выполнением этого четырехполюсника в виде Г-образного соединения двух комплексных двухполюсников, формированием первого комплексного двухполюсника Г-образного соединения из последовательно соединенных первого резистивного двухполюсника с сопротивлением R1, конденсатора с емкостью С и параллельно соединенных между собой второго резистивного двухполюсника с сопротивлением R2 и катушки с индуктивностью L и выбором указанных параметров по соответствующим математическим выражениям) обеспечивает заданные зависимости отношения модулей и разности фаз передаточной функции модулятора в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты и заданные зависимости модуля и фазы передаточной функции модулятора от амплитуды управляющего низкочастотного сигнала, непрерывно изменяемой в пределах от одного уровня управляющего низкочастотного сигнала до другого.
Предлагаемые технические решения практически применимы, так как для их реализации могут быть использованы серийно выпускаемые промышленностью полупроводниковые диоды (параметрические диоды, p-i-n-диоды, ЛПД, туннельные диоды, диоды Ганна и т.д.), индуктивности и емкости, сформированные в заявленную схему устройства модуляции. Частотные характеристики КЧ и первого комплексного двухполюсника Г-образного соединения, значения сопротивлений резистивных элементов, индуктивностей и емкостей могут быть определены с помощью математических выражений, приведенных в формуле изобретения.
Технико-экономическая эффективность предложенного способа и устройства заключается в одновременном обеспечении заданных зависимостей отношения модулей и разности фаз передаточной функции модулятора в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты и заданные зависимости модуля и фазы передаточной функции модулятора от амплитуды управляющего низкочастотного сигнала, непрерывно изменяемой в пределах от одного уровня управляющего низкочастотного сигнала до другого, что способствует формированию модулированных или манипулированных по амплитуде и (или) по фазе высокочастотных сигналов в большей полосе частот при увеличенных областях физической реализуемости как областей изменения действительной и мнимой составляющих сопротивлений источника сигнала и нагрузки.
Изобретение относится к области радиосвязи и радиолокации. Технический результат изобретения заключается в обеспечении модуляции амплитуды и фазы высокочастотного сигнала при заданных зависимостях отношения модулей и разности фаз передаточной функции модулятора в двух состояниях управляемого нелинейного элемента, определяемых двумя уровнями управляющего низкочастотного сигнала. Способ амплитудно-фазовой модуляции высокочастотного сигнала характеризуется тем, что высокочастотный сигнал подают на модулятор, выполненный из четырехполюсника, управляемого двухэлектродного нелинейного элемента, источника управляющего низкочастотного сигнала и нагрузки, амплитуду и фазу высокочастотного сигнала изменяют путем изменения амплитуды управляющего низкочастотного сигнала на нелинейном элементе, при этом заданные зависимости отношения модулей и разности фаз передаточной функции модулятора и заданные зависимости модуля и фазы передаточной функции модулятора от амплитуды управляющего низкочастотного сигнала обеспечивают за счет выбора зависимости элемента матрицы сопротивлений комплексного четырехполюсника от частоты с помощью заданных математических выражений. 2 н.п. ф-лы, 4 ил.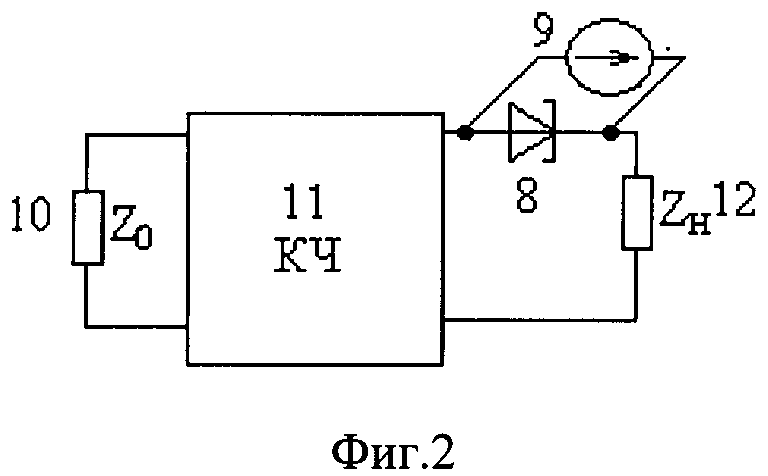
1. Способ амплитудно-фазовой модуляции высокочастотного сигнала, состоящий в том, что высокочастотный сигнал подают на модулятор, выполненный из четырехполюсника, управляемого двухэлектродного нелинейного элемента, источника управляющего низкочастотного сигнала и нагрузки, амплитуду и фазу высокочастотного сигнала изменяют путем изменения амплитуды управляющего низкочастотного сигнала на нелинейном элементе, отличающийся тем, что четырехполюсник выполняют комплексным из реактивных и резистивных элементов, выход источника высокочастотного сигнала подключают к входу четырехполюсника, нелинейный элемент включают в продольную цепь между выходом четырехполюсника и нагрузкой, заданные зависимости отношения модулей и разности фаз передаточной функции модулятора в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты и заданные зависимости модуля и фазы передаточной функции модулятора от амплитуды управляющего низкочастотного сигнала, непрерывно изменяемой в пределах от одного уровня управляющего низкочастотного сигнала до другого, в заданной полосе частот обеспечивают за счет выбора зависимости элемента z11 матрицы сопротивлений комплексного четырехполюсника от частоты с помощью следующего математического выражения:
где  ; z21, z22 - заданные зависимости соответствующих элементов матрицы сопротивлений комплексного четырехполюсника от частоты; m21, φ21 - заданные зависимости отношения модулей и разности фаз передаточной функции в двух состояниях управляемого нелинейного элемента, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты в заданной полосе частот; z1,2 - заданные зависимости комплексного сопротивления двухполюсного нелинейного элемента в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты в заданной полосе частот; z0, zn - заданные зависимости комплексных сопротивлений источника высокочастотного сигнала и нагрузки от частоты.
; z21, z22 - заданные зависимости соответствующих элементов матрицы сопротивлений комплексного четырехполюсника от частоты; m21, φ21 - заданные зависимости отношения модулей и разности фаз передаточной функции в двух состояниях управляемого нелинейного элемента, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты в заданной полосе частот; z1,2 - заданные зависимости комплексного сопротивления двухполюсного нелинейного элемента в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты в заданной полосе частот; z0, zn - заданные зависимости комплексных сопротивлений источника высокочастотного сигнала и нагрузки от частоты.
2. Устройство амплитудно-фазовой модуляции высокочастотного сигнала, состоящее из источника высокочастотного сигнала, четырехполюсника, двухэлектродного нелинейного элемента, источника управляющего низкочастотного сигнала и нагрузки, отличающееся тем, что четырехполюсник выполнен комплексным в виде Г-образного соединения двух комплексных двухполюсников, выход источника высокочастотного сигнала подключен к входу четырехполюсника, нелинейный элемент включен в продольную цепь между выходом четырехполюсника и нагрузкой, первый двухполюсник Г-образного соединения сформирован из последовательно соединенных первого резистивного двухполюсника с сопротивлением R1, конденсатора с емкостью С и параллельно соединенных между собой второго резистивного двухполюсника с сопротивлением R2 и катушки с индуктивностью L, значения параметров первого двухполюсника Г-образного соединения определены в соответствии со следующими математическими выражениями:





 ; r1, r2, x1, x2 - оптимальные значения действительных и мнимых составляющих сопротивления первого комплексного двухполюсника Г-образного соединения на двух частотах;
; r1, r2, x1, x2 - оптимальные значения действительных и мнимых составляющих сопротивления первого комплексного двухполюсника Г-образного соединения на двух частотах;  - оптимальные значения комплексного сопротивления первого комплексного двухполюсника Г-образного соединения на двух частотах;
- оптимальные значения комплексного сопротивления первого комплексного двухполюсника Г-образного соединения на двух частотах;  ; Z2n - заданные значения комплексного сопротивления второго комплексного двухполюсника Г-образного соединения на двух частотах; m21n, φ21n - заданные значения отношений модулей и разностей фаз передаточной функции в двух состояниях управляемого нелинейного элемента, определяемых двумя уровнями управляющего низкочастотного сигнала, на двух частотах; z1n,2n - заданные значения комплексного сопротивления двухполюсного нелинейного элемента в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, на двух частотах; z0n, znn - заданные значения комплексных сопротивлений источника высокочастотного сигнала и нагрузки на двух частотах; ω1,2=2πf1,2; n=1, 2 - номера заданных двух частот f1,2.
; Z2n - заданные значения комплексного сопротивления второго комплексного двухполюсника Г-образного соединения на двух частотах; m21n, φ21n - заданные значения отношений модулей и разностей фаз передаточной функции в двух состояниях управляемого нелинейного элемента, определяемых двумя уровнями управляющего низкочастотного сигнала, на двух частотах; z1n,2n - заданные значения комплексного сопротивления двухполюсного нелинейного элемента в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, на двух частотах; z0n, znn - заданные значения комплексных сопротивлений источника высокочастотного сигнала и нагрузки на двух частотах; ω1,2=2πf1,2; n=1, 2 - номера заданных двух частот f1,2.
| Устройство для модуляции отраженного сигнала | 1990 |
|
SU1800579A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| JP 2014120790, 30.06.2014. | |||

