Принятые сокращения:
АПФ - активный полосовой фильтр;
ДК - дополнительная катушка индуктивности (обмотка трансформатора, включающего ОК и/или КО, которая может быть как первичной - тогда она служит для возбуждения OK/КО, так и вторичной - тогда она служит для связи с OK/КО через сердечник);
ИЦ - измерительная электрическая цепь - электрический сигнал на выходе такой цепи связан с упоминаемыми ниже характеристиками движения установленным или заданным образом, так, например, амплитуда синусоидального напряжения на выходе ИЦ′ может быть прямо пропорциональна угловой скорости, тогда как его частота может быть связана с угловым ускорением экспоненциальной зависимостью, в свою очередь фаза выходного сигнала ИЦ может быть связана с линейным ускорением гиперболической зависимостью (виды зависимостей выбираются в соответствии с математическим аппаратом, используемым в дальнейшем при определении точных значений), причем такой сигнал может быть преобразован в показания индикаторов, записан или передан другим устройствам для анализа и проч., т.е. использование понятия «приблизительное значение» для выходного сигнала ИЦ не совсем корректно и ниже осуществляется с этой оговоркой;
КО - опорная (противопоставляемая - сигнал которой сопоставляется с сигналом ОК) измерительная катушка индуктивности, ось которой может быть параллельна оси ОК (с учетом конструктивных возможностей, а также с учетом возможностей изготовления деталей и их сборки/юстировки), причем ОК и КО могут лежать в одной плоскости (если они плоские) или на одном уровне (если они пространственные), может совпадать с ней (тогда такая катушка будет оппозитной), а может быть и перпендикулярна оси ОК или располагаться под углом к ней;
МК - аналоговое или цифровое решающее устройство (например, микроконтроллер), позволяющее получать на своем выходе сигнал, отражающий условно точные значения упомянутых ниже характеристик движения, форма выходного сигнала МК определяется используемым интерфейсом;
ОК - основная (или первая измерительная - в качестве основной может быть названа любая измерительная катушка соответствующего ЧЭ, тогда как все прочие измерительные катушки будут называться опорными) катушка индуктивности (ОК может отличаться от КО направлением «намотки» и предпочтительно только этим, но также диаметром, количеством витков, материалом токопроводящих частей и проч.), важно то, что ОК и КО должны быть жестко друг с другом связаны, таким образом, чтобы при движении любой из них другая двигалась бы тем же самым образом - чтобы катушки как бы составляли одно целое и при движении повторяли судьбу объекта исследования, будучи жестко к нему прикрепленными;
П - энергонезависимая память (может включать «самописец» типа черного ящика);
ППФ - пассивный полосовой фильтр;
ПС - полезный сигнал (или полезные сигналы);
У - усилитель;
ЧЭ - чувствительный элемент датчика, в котором реализован представленный способ;
Экран - магнитный и/или электрический экран, и/или теплоизоляция.
В представленном материале используются следующие понятия:
- ось катушки (вообще, автор считает, что из контекста всякий раз очевидно, что является осью катушки) - воображаемая прямая, проходящая через центр1 (1 - исходная точка спиральной линии, в соответствии с которой намотана основная часть витков катушки (см. фиг. 1 точки, от которых идут размерные линии)) плоской катушки или проекции винтоспиральной катушки на плоскость, перпендикулярную направлению винтового шага, перпендикулярная плоской катушке или плоскости проекции; воображаемая прямая, проходящая внутри пространственной катушки, в среднем одинаково удаленная от токопроводящих частей катушки (от ее витков); воображаемая прямая параллельная направлению максимального по модулю вектора магнитной индукции в центральной части катушки (при отсутствующем сердечнике);
- ПС - происходящие в ОК, КО, ДК, а также в узлах и/или элементах электрических цепей аналоговые или дискретные (в случае с периодическим внешним возбуждением устройства) физические процессы, параметры которых изменяются в соответствии с изменением упомянутых ниже характеристик движения, исходно ПС рождается в ОК, КО и/или ДК (будучи индуцированными все теми же ОК и КО), но, как правило, они сильно зашумлены, процесс выделения ПС проходит в ППФ и АПФ (могут использоваться и другие фильтры), при этом может меняться форма ПС, т.е. ПС на выходе катушек может не быть подобен ПС на выходе ППФ или АПФ, равно как ПС на выходе АПФ может не быть подобен ПС на выходе У, важно только что ПС на выходе У отражает упомянутые ниже характеристики движения объекта, что он зависит от них;
- ЧЭ - состоящее из преимущественно минимально необходимого числа звеньев преобразования измеряемой величины (см. упомянутые ниже параметры движения) самостоятельное конструктивно автономное контактное (входящее в контакт с исследуемым объектом) средство, преобразующее такую величину в являющийся функцией от нее электрический сигнал, который может быть выделен из помех, усилен, измерен, передан, преобразован, зарегистрирован, сохранен;
- датчик - законченный по своей функциональности прибор, подключаемый к системам автоматического управления или регистрации.
Изобретение имеет отношение к измерительной технике и может быть использовано при определении характеристик движения объектов2 (2 - к которым жестко крепится датчик с представленными ЧЭ) (в частности, перемещения элементов конструкции относительно друг друга), таких как скорость, ускорение и параметры вибрации, в частности линейное ускорение, угловые скорость и ускорение и/или параметры вращательных (в т.ч. крутильных) вибраций - частота, амплитуда и др., что связано с поворотом или вращением.
Основное назначение изобретения - определение характеристик движения объектов, в том числе для использования в системах, требующих ориентацию на различные физические принципы определения упомянутых характеристик (в системах, предполагающих проведение независимых измерений).
Известен способ определения характеристик движения объекта, предполагающий применение включающего ЧЭ датчика с ОК (полезная модель РФ №58233), и соответствующий ему датчик.
К недостатку таких способа и акселерометра следует отнести ориентацию на использование подвижных деталей или узлов, что снижает надежность и долговечность.
Технический результат от использования представляемого изобретения заключается в повышении надежности работы акселерометра за счет исключения из него подвижных деталей или узлов.
Достигается такой результат благодаря ориентации на инерционное движение относительно движущегося с ускорением тела находящихся в нем свободных носителей заряда, в частности на движение таких носителей под действием центробежной силы, а также на магнитные эффекты.
Представленные способ и ЧЭ, как и прототип, предполагают применение ОК.
При этом они ориентированы на использование следующих отличительных признаков.
Главные отличительные признаки представленного способа:
- используют как минимум одну КО (могут быть использованы вспомогательные КО, например, при использовании плоской ОК могут использовать пару также плоских КО, одну из которых могут расположить непосредственно под ОК параллельно ей, а вторую - сбоку от них перпендикулярно им с тем, чтобы иметь возможность дополнительно оценивать линейные ускорения вдоль оси ОК, вообще, число катушек может быть велико, так, могут использовать систему из трех пар катушек, оси которых перпендикулярны друг другу, притом что оси катушек каждой пары параллельны, целесообразно также располагать катушки в одной плоскости, поскольку их отклик на линейные ускорения будет одинаков, тогда как на угловые - будет зависеть от расстояния до оси вращения);
- в качестве выходных сигналов ЧЭ используют сигналы, получаемые от упомянутых катушек (например, от внутренних (ближних к центру катушки) выводов катушек при «заземленных» внешних),
- в другом исполнении посредством сердечника обеспечивают связь (электромагнитную) как минимум одной из упомянутых катушек с как минимум одной ДК, причем в катушках, упомянутых первыми (ОК и КО), связанных посредством сердечника с ДК, могут возбуждать импульсный ток (с высокой скважностью 2-50 и более), при этом в качестве сигналов ЧЭ используют сигналы, получаемые в том числе и от используемых ДК, регистрирующих релаксационные процессы в измерительных катушках, с которыми они связаны;
- до выделения ПС из помех обработку выходных сигналов ЧЭ, соответствующих ОК и как минимум одной КО (в частности, электромагнитно связанных с выходными сигналами ОК и КО - речь идет о возможном использовании выходных сигналах ДК, так или иначе соответствующих сигналам ОК и КО) проводят условно раздельно3 (3 - имеется в виду возможность выделения из обработанного сигнала сигналов ОК и КО (так, можно предположить некий утрированный случай такой кодировки сигналов ОК и КО, при которой они могут быть представлены одним подлежащим обработке сигналом (например, один кодируется в амплитуде, а другой - в частоте), из выходной формы которого в независимом виде их можно легко извлечь), т.е. сигналы ОК и КО перед обработкой не суммируются, не перемножаются и проч.) (до приемлемого для последующей окончательной обработки соотношения сигнал/шум), благодаря чему обеспечивают возможность сопоставления ПС, связанных (например, электромагнитно - при использовании ДК) с ОК и с как минимум одной КО, друг с другом (т.е. число каналов предобработки - фильтрации и усиления - сигналов должно быть на 1 больше числа используемых КО);
- для сопоставления сигналов используют электронную цепь сравнения ПС, посредством которой находят различие в них (в сигналах);
- по такому различию определяют приблизительное значение как минимум одной характеристики из упомянутых (по различиям двух ПС могут определить лишь одну характеристику, по различиям трех ПС могут определить и две характеристики (но не обязательно - могут только уточнить одну), четырех - три (с тем же примечанием) и т.д.), для чего используют измерительную электронную цепь, которая может быть совмещена с упомянутой цепью сравнения (примечание: могут определять не физический параметр, такой как, например, скорость [рад/с], а некий безразмерный параметр, который со скоростью связан нелинейной зависимостью - см. признак через один ниже);
- по самим ПС (например, по значению напряжений на выходе У и У′, например по их суме или по их произведению и т.д.), не проводя оценки их различия, с учетом4 (4 - так, если известно, что имеет место совместное влияние на сигналы ОК и КО углового и линейного ускорений, а также угловой скорости, то вычислив приблизительное значение последней и учтя динамику ее изменения, можно определить линейное ускорение - важно лишь выбрать ту часть, то соотношение ПС, которое связано исключительно с угловой скоростью) только что упомянутого приблизительного значения, которое было определено на предыдущем шаге и/или с учетом динамики изменения такого значения (например, производной от него, в т.ч. когда она равна нулю) определяют приблизительное5 (5 - проблема заключается в том, что точное значение может быть получено только при учете всех ПС, например, первоначально определенное значение угловой скорости подлежит корректировке после определения линейного ускорения) значение как минимум одной другой характеристики из упомянутых, для чего также используют измерительную электронную цепь либо дополнительную, либо упомянутую первой;
- по полезным сигналам и упомянутому различию и/или по их (любого из сигналов и/или их различия) динамике с использованием МК или таковых и энергонезависимой памяти определяют точные значения упомянутых характеристик.
Частные отличительные признаки представленного способа:
- с учетом указанных приблизительных значений с использованием МК или МК и П определяют точные значения упомянутых характеристик, учитывая наиболее вероятную (в текущих условиях при текущих абсолютных величинах) связь точных значений с приблизительными;
- предварительно (перед использованием по назначению, на производстве, при сдаче в эксплуатацию и проч.) проводят калибровку датчика с использованием эталонного средства измерения упомянутых характеристик (например, с использованием инерциальной навигационной системы);
- датчик и эталонное средство измерения объединяют друг с другом в систему таким образом, чтобы они двигались как одно целое;
- приводят полученную систему в различные движения, соответствующие возможным движениям объекта (не обязательно со всеми возможными движениями объекта - в последующем допускается аппроксимация (в частности, интер- и экстраполяция), но лучше - не только со всеми возможными, но и на самом объекте (или его макете) при положении датчика на штатном месте (в составе объекта));
- в процессе таких движений (с ускорениями, торможениями, поворотом и т.д.) определяют полезные сигналы, соответствующие основной и используемым опорным катушкам, и их различия или указанные приблизительные значения, полученные с помощью работающего в режиме «калибровка»6 (6 - в этом режиме датчик может просто выдавать ПС ОК и КО и/или ДК) датчика, а также точные значения упомянутых характеристик, полученные с помощью эталонного средства;
- устанавливают соответствие последних тем или другим (сигналам или приблизительным значениям) первым (используя, например, компьютер), которое в электронном виде сохраняют в П датчика;
- также (с использованием компьютера) могут находить функционал, связывающий последние с теми или другими первыми, который в виде машинной программы записывают в МК датчика;
- при эксплуатации (при определении упомянутых характеристик объекта с помощью датчика) учитывают установленное соответствие и/или используют найденный функционал для вычисления по упомянутым полезным сигналам или по приблизительным значениям точных;
- в состав ЧЭ или датчика могут включить термодатчик, предназначенный для определения температуры ЧЭ и/или датчика;
- при этом, осуществляя калибровку, изменяют температуру датчика и определяют связь с последней изменения обозначенных соответствия и/или функционала - устанавливают дополнительные соответствия указанных полезных сигналов или приблизительных значений, полученных с помощью датчика, и точных значений, полученных с помощью эталонного средства, для различных температур, и/или находят дополнительные функционалы для различных температур, связывающие последние с первыми, и/или определяют позволяющие учитывать температуру корректирующие коэффициенты (один, два или более) для функционала, упомянутого первым;
- новые или дополнительные соответствия либо функционалы соответственно сохраняют обозначенным образом в П или МК;
- полученные корректирующие коэффициенты учитывают при сохранении функционала, упомянутого первым;
- при эксплуатации (при определении упомянутых характеристик объекта с помощью датчика) учитывают показания термодатчика, для чего обеспечивают связь последнего с П и/или МК.
Отличительные признаки ЧЭ:
- используют ОК и КО;
- ОК и КО жестко связывают друг с другом посредством жестких детали или конструкции (например, посредством основания датчика) либо посредством протяженной и развитой жесткой конструкции (рамы летательного аппарата, корпуса судна и т.п.);
- ОК и КО могут быть намотаны в различных направлениях (по часовой и против часовой стрелок, а также с разным направлением намотки одной катушки), при этом расположены относительно друг друга они должны быть таким образом, чтобы в пределах заданной точности, заложенной при проектировании ЧЭ, а также реализованной при изготовлении его деталей и их сборке в конечное изделие, оси катушек совпадали;
- ОК и КО могут быть выполнены в виде плоских спиралей и лежать на одной плоскости (будучи напыленными на одну подложку), при этом ОК может окружать КО (или наоборот);
- ОК и КО могут быть намотаны в произвольных направлениях, тогда как ОК и КО расположены относительно друг друга таким образом, что в пределах заданной точности, заложенной при проектировании чувствительного элемента, а также реализованной при изготовлении его деталей и их сборке в конечное изделие, оси катушек параллельны, но не совпадают друг с другом;
- оси катушек находятся на заданном расстоянии друг от друга, превышающем полусумму их максимальных диаметров (сумму их радиусов), и при этом катушки расположены на одном уровне с точностью, соизмеримой с суммарной длиной катушек (так, плоские катушки могут быть расположены в одной плоскости (могут быть напылены на одну подложку) рядом друг с другом, практически соприкасаясь или находясь на заданном расстоянии, возможно, большом);
- ОК и КО могут располагаться друг рядом с другом (на удалении всего в несколько см), вплоть до непосредственной близости друг к другу (при расстоянии между катушками менее 1 мм или вообще равном нулю), а могут располагаться на значительном удалении друг от друга в несколько метров, а то и десятков и даже сотен метров;
- используют центрирующий узел или центрирующую деталь, обеспечивающую упомянутую точность взаимного расположения катушек (их соосность);
- ОК и/или КО заключают в экран, внутри которого размещают магнит (предпочтительно это должен быть электромагнит, тогда как допускается использование и постоянного магнита);
- ОК и/или КО заключают в экран, внутри которого размещают конденсатор, на который такая катушка замкнута (с него и снимают выходной сигнал соответствующей катушки);
- ОК и КО размещают на замкнутых тороидальных сердечниках;
- тороидальные сердечники располагают относительно друг друга таким образом, что на виде с боку на них один большей своей частью располагался над осью катушек, а другой - под ней (фиг. 2);
- ОК и КО намотаны в различных направлениях, их оси параллельны и разнесены друг от друга, а сами катушки посажены на один замкнутый тороидальный сердечник;
- при этом ОК и КО плоские и лежат в одной плоскости;
- ОК и КО размещают на замкнутом сердечнике, причем сердечник выполняют такой формы, что входя в одну из них справа в другую он входит уже слева (или наоборот);
- между ОК и КО располагают несколько слоев различного материала, жестко связанных между собой;
- ОК и КО расположены рядом друг с другом - одна из них находится в области, границы которой удалены не более чем на 50 максимальных диаметров от другой, притом что они расположены приблизительно - в пределах наименьшего диаметра меньшей из них - на одном уровне;
- непараллельность осей ОК и КО определяется также их установкой на протяженной и развитой жесткой конструкции, и при этом они расположены на значительном удалении друг от друга, более чем в 50 раз превосходящем диаметр любой из них;
- ОК и КО могут быть выполнены плоскими;
- на сердечниках могут быть расположены ДК (электромагнитно связанные посредством сердечника одна с ОК, а другая - с КО);
- ОК и КО могут быть выполнены плоскими, тогда как ДК могут быть намотаны вдоль оси сердечника7 (7 - ось тороидального сердечника - окружность (имеется в виду, что ДК намотаны в один ряд вокруг фрагмента тора)) в один ряд;
- одна из ДК находится (на виде на тороидальные сердечники сбоку) слева от ОК и КО над их осью, а другая - справа под осью, причем плоскости ОК и КО не пересекают дополнительные катушки.
- сердечник, на котором расположены и ОК и КО может быть выполнен в виде несвязанной в середине цифры 8;
- ДК на таком сердечнике может быть расположена на максимальном удалении от середины сердечника, ассоциируемой с серединой упомянутой цифры, в которой она не сомкнута;
- между ОК и КО может находиться многослойная прокладка или подложка;
- роль прокладки или подложки может выполнять многослойная плата;
- подложка может быть выполнена в виде планарной сборки керамических пластин;
- в центре такой сборки может быть размещена как минимум одна пластина из ферромагнетика;
- в центре такой сборки могут быть размещены и пластины из различных ферромагнетиков;
- между ОК и КО может быть размещен многослойный фрагмент как минимум одного экрана;
- ОК и КО могут включать незамкнутые сердечники;
- параллельные оси катушек могут не совпадать;
- оси катушек могут быть разнесены на расстояние, превышающее половину суммы максимальных размеров катушек;
- ОК и КО могут быть выполнены плоскими спиральными, и при этом они могут быть расположены друг рядом с другом;
- такие лежащие в одной плоскости ОК и КО могут быть намотаны в разных направлениях, тогда как их может объединять общий замкнутый тороидальный сердечник;
- ОК и КО могут лежать в одной плоскости, и при этом одна катушка может быть окружена другой;
- расстояние между осями лежащих в одной плоскости ОК и КО может быть меньше 10 максимальных диаметров любой из них;
- катушки могут быть расположены на одном уровне (например, лежать в одной плоскости, если ОК и КО плоские катушки);
- устройство может включать вспомогательную плоскую опорную катушку, жестко связанную аналогичным образом с упомянутыми здесь первыми (ОК и КО), притом что вспомогательная катушка расположена таким образом, что в пределах заданной точности, заложенной при проектировании чувствительного элемента, а также реализованной при изготовлении его деталей и их сборке в конечное изделие (или также при установке самих катушек на упомянутой конструкции), ее ось параллельна осям катушек, упомянутых здесь первыми;
- расстояние от вспомогательной катушки до ближайшей из упомянутых здесь первыми может более чем в 50 раз превосходить диаметр любой из них;
- вспомогательная катушка может быть расположена таким образом, что перпендикуляры к серединам отрезков, связывающих центры катушек, не будут пересекаться в одной точке;
- все три разнесенные друг от друга катушки могут быть расположены на разных уровнях.
Изобретение проиллюстрировано чертежами.
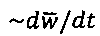
На фиг. 1 показан один из вариантов функциональной схемы датчика, реализующего представленный способ (число витков изображенных катушек меньше требуемого - катушки нарисованы условно).
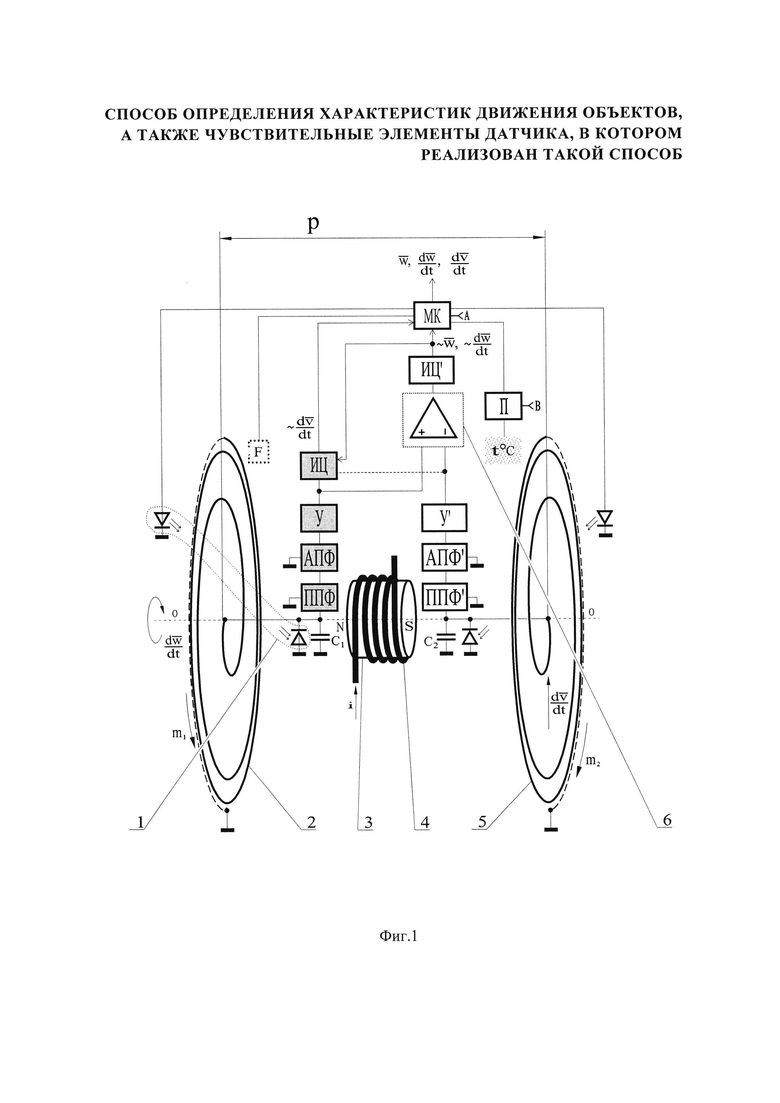
На фиг. 2 показан вид сбоку на сердечники ЧЭ, на которых расположены ОК и КО, а также пара ДК.
На фиг. 3 показан вид сбоку на замкнутый сердечник ЧЭ, выполненный в виде несвязанной в середине цифры 8, на котором расположены ОК, КО и одна ДК.
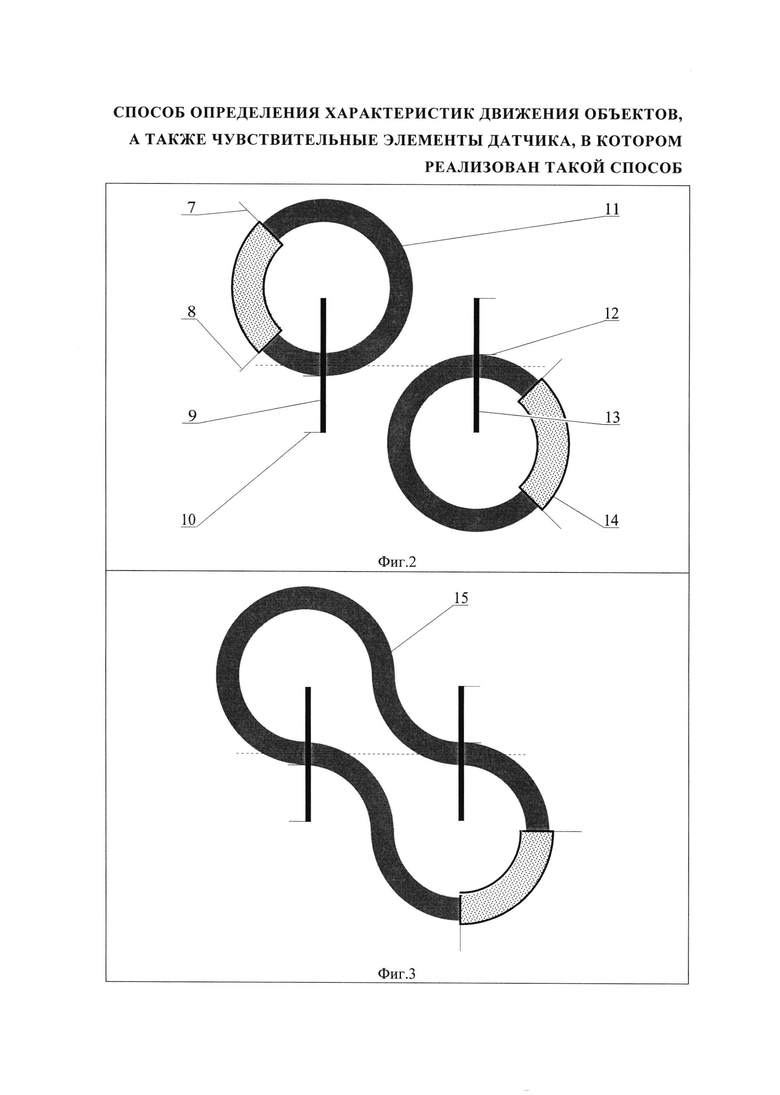
На фиг. 4 показан разрез ЧЭ простейшего (с точки зрения используемых технологий) исполнения.
На фиг. 5 показан разрез ЧЭ, ОК и КО которого включают незамкнутые ферритовые сердечники.
На фиг. 6 показан разрез ЧЭ, катушки которого напылены на многослойную плату (керамика, …керамика, ферромагнитный материал, керамика, …керамика).
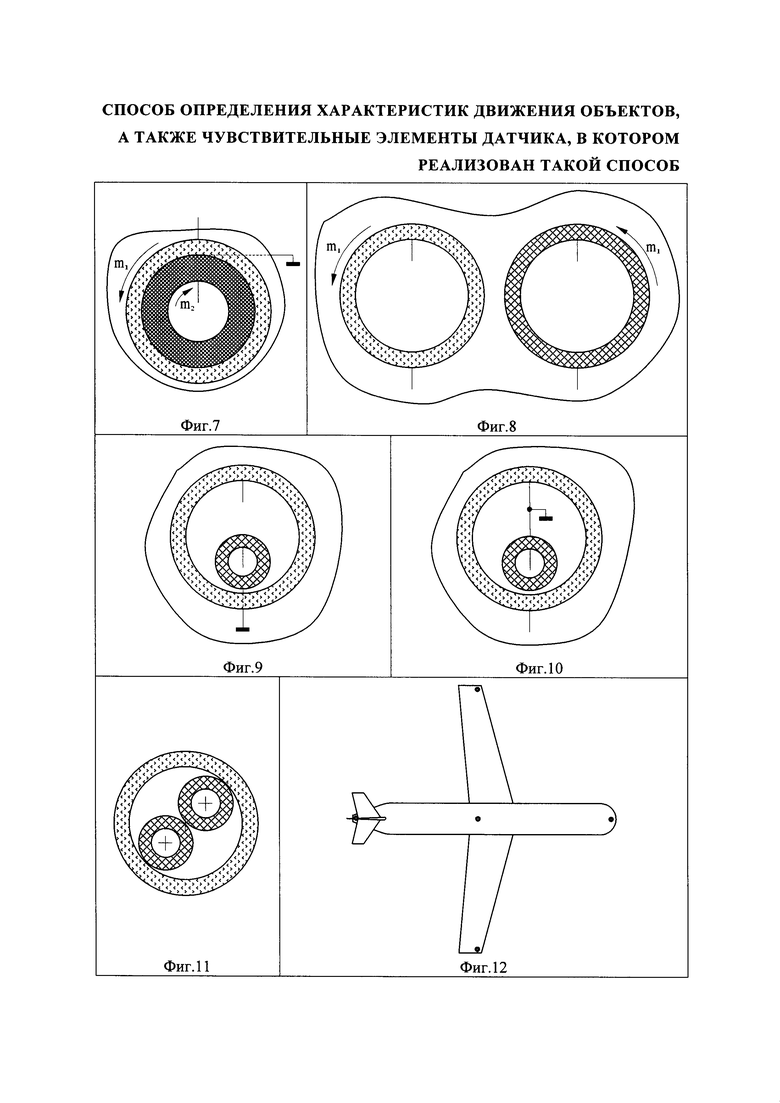
На фиг. 7 показан ЧЭ, ОК и КО которого напылены на одну сторону керамической пластины, притом что КО находится в ОК.
На фиг. 8 показан ЧЭ, включающий вспомогательную КО, расположенную на одной стороне платы с ОК..
На фиг. 9 показан ЧЭ, внешние выводы ОК и вспомогательной КО которого заземлены, притом что ОК окружает вспомогательную КО.
На фиг. 10 показан ЧЭ, внешний вывод КО которого соединен с внутренним ОК и эти выводы заземлены.
На фиг. 11 показан ЧЭ, ОК которого лежит в одной плоскости с парой вспомогательных КО, притом что центры катушек лежат на одной прямой - перпендикуляры к серединам отрезков, связывающих центры вспомогательных КО и ОК, не пересекаются в одной точке, а следовательно, нет такой оси, при вращении катушек относительно которой они выдавали бы одинаковый сигнал.
На фиг. 12 показано возможное местоположение катушек ЧЭ на летательном аппарате (отмечено точками или кружочками).
Фиг. 1 приведена для пояснения одного из вариантов реализации представленного способа.
Фиг. 2 приведена для иллюстрации возможного взаимного расположения ОК и КО, а также сердечников и ДК.
Фиг. 3 приведена для иллюстрации возможного взаимного расположения ОК и КО, установленных на одном замкнутом сердечнике, а также для иллюстрации формы такого сердечника и положения на нем ДК.
Фиг. 4 приведена для обеспечения возможности быстрого подтверждения промышленной применимости изобретения, а также для иллюстрации использования центрирующего узла.
Фиг. 5 приведена для иллюстрации использования центрирующей детали, а также иллюстрации ЧЭ, ОК и КО которого включают незамкнутые сердечники.
Фиг. 6 приведена для иллюстрации варианта исполнения ЧЭ под поверхностный монтаж.
Фиг. 7 приведена для пояснения одного из вариантов реализации представленного ЧЭ в наиболее компактном исполнении.
Фиг. 8 приведена для иллюстрации возможного взаимного расположения ОК и вспомогательной КО, при котором в случае вращения катушек в плоскости по чертежу сигналы катушек будут зависеть от расстояния от оси вращения до центров катушек, т.е. практически никогда не будут одинаковы (для того чтобы сигналы были одинаковы, ось вращения должна лежать на перпендикуляре к середине отрезка, связывающего центры катушек).
Фиг. 9 приведена для иллюстрации еще одного возможного взаимного расположения ОК и вспомогательной КО при компактном исполнении ЧЭ, а также одного из способов соединения выводов ОК и вспомогательной КО.
Фиг. 10 приведена для иллюстрации другого способа соединения выводов ОК и вспомогательной КО.
Фиг. 11 приведена для иллюстрации взаимного расположения ОК и вспомогательных КО, при котором не существует такой оси, перпендикулярной плоскости чертежа, при вращении вокруг которой все три катушки выдали бы одинаковый сигнал (здесь следует пренебречь тем, что вспомогательные КО нарисованы отличными от ОК, т.е. считать, что речь идет о соответствующих пропорциях сигналов).
Фиг. 12 приведена для иллюстрации варианта расположения катушек на исследуемом объекте (в носовой и кормовой частях, в центральной части и на концах крыльев при образовании двух троек катушек, центры которых лежат на одной прямой).
На чертежах приняты следующие обозначения:
1 - оптрон (здесь может использоваться и пара оптронов, фотодиоды которых подсоединены катодами к анодам друг друга и активируются последовательно друг за другом), включенный таким образом, что его фотодиод работает в фотогальваническом режиме, предназначен для работы в импульсном режиме с высокой скважностью (много больше 2);
2 - ОК, «намотанная» против часовой стрелки (на чертежах изображена плоская ОК, спираль которой закручивается против часовой стрелки при движении от центра катушки к ее периферии), токопроводящая дорожка ОК может быть выполнена, например, на основе серебра, вообще, катушка может быть выполнена в виде пространственной спирали - в этом случае о направлении «намотки» ОК можно будет судить по ее проекции на плоскость, перпендикулярную оси катушки, проходящей через центр спирали;
3 - сердечник электромагнита, предназначенного для создания постоянного магнитного поля вблизи ОК или КО либо для возбуждения ОК и/или КО переменным магнитным полем;
4 - катушка электромагнита с сердечником 3;
5 - КО, предпочтительно полностью идентичная ОК за тем исключением, что ее «намотка» выполнена по часовой стрелке;
6 - выделяющая разность преобразованных предыдущими электронными цепями сигналов ОК и КО электронная цепь сравнения, включающая как минимум один операционный усилитель, к инвертирующему входу которого поступает электрический сигнал от КО, преобразованный предыдущей электронной схемой, включающей пассивный полосовой фильтр, активный полосовой фильтр (предпочтительно построенный на базе двух или четырех операционных усилителей) и усилитель, как правило, низкочастотного сигнала, а к неинвертирующему - также преобразованный сигнал, но от ОК (предпочтительно электронные схемы преобразования сигналов ОК и КО должны быть одинаковы) либо наоборот - к инвертирующему от ОК, а к неинвертирующему - от КО;
7 - верхний (в соответствии с чертежами) вывод работающей совместно с ОК ДК, которая предназначена для возбуждения и/или связи через сердечник с ОК;
8 - нижний вывод работающей совместно с ОК ДК;
9 - ОК, расположенная на тороидальном сердечнике;
10 - внешний (от периферийного витка) вывод ОК;
11 - тороидальный сердечник;
12 - внутренний вывод КО;
13 - КО, расположенная на тороидальном сердечнике;
14 - расположенная на одном сердечнике с КО ДК (работающая совместно с КО), расположенная на виде сбоку на сердечнике справа от ОК и КО;
15 - выполненный в виде несвязанной в середине цифры 8 замкнутый сердечник, на котором одновременно располагаются и ОК, и КО;
16 - крышка завальцованного экрана;
17 - стакан завальцованного экрана;
18 - гайка с уступом, высота которого примерно равна толщине провода ОК, наружная поверхность уступа не цилиндрическая, а соответствует по своей форме одному витку спирали, в соответствии с которой «намотана» ОК (на чертежах это плохо видно);
19 - ОК, выполненная в виде спирали из изолированного провода круглого сечения в броневом сердечнике;
20 - винт, который, будучи ввинченным в гайку до упора в ее уступ, образует узел с предназначенным для укладки провода ОК зазором между плоской поверхностью гайки и винта, равным толщине провода ОК (такой узел позволяет самым простым образом намотать плоскую катушку с большим числом витков в условиях примитивного эксперимента - другого назначения у изделия, представленного на фиг. 4, по видимости, нет);
21 - детали многослойной прокладки;
22 - КО, аналогичная ОК поз. 19;
23 - место завальцовки деталей экрана (крышки и стакана);
24 - внешний вывод ОК;
25 - внутренний вывод ОК (внешний и внутренние выводы ОК не проходят во внутреннем пространстве экрана КО);
26 - центрирующая гильза;
27 - компаунд;
28 - контргайка;
29 - фиксирующая гайка;
30 - замыкающий фрагмент броневого сердечника;
31 - центрирующий узел;
32 - чашеобразный фрагмент броневого сердечника;
33 - внешний вывод КО;
34 - внутренний вывод КО;
35 - включающий отверстия под штифт (не показаны) центрирующий вал с резьбовой частью, предназначенной для крепления ЧЭ, например, к основанию датчика;
36 - крепежный элемент ЧЭ, электрически соединенный с внешними выводами ОК и КО, выполняет функцию центрирующей детали;
37 - стакан сварного экрана;
38 - крышка сварного экрана;
39 - ОК, выполненная в виде спирали из серебра, напыленного на керамическую подложку;
40 - внутренний проводник;
41 - внутренний вывод ОК;
42 - герметизирующий компаунд;
43 - ферритовый сердечник ОК;
44 - керамическая подложка, предпочтительно многослойная, выполненная в виде планарной сборки керамических пластин (в центре такой сборки могут располагаться пластины из ферромагнетиков, соединенные с экранами);
45 - КО, аналогичная ОК поз. 39;
46 - место для распайки (под поверхностный монтаж), электрически связанное с внешним выводом ОК;
47 - токопроводящая дорожка;
48 - защитное покрытие, например слой керамики, напыленной на ОК;
49 - место для распайки, электрически связанное с внутренним выводом ОК;
50 - место для распайки, электрически связанное с внутренним выводом КО;
51 - многослойная керамическая подложка квадратной формы с отверстиями под винты и штифты (не показаны), расположенными в углах подложки;
52 - место для распайки, электрически связанное с внешним выводом КО;
С1 - конденсатор, на который замкнута ОК (на чертежах показано, что ОК непосредственно замкнут на этот конденсатор, однако это не обязательно), такой конденсатор можно рассматривать в качестве элемента пассивного полосового фильтра, но целесообразнее его размещать в непосредственной близости к ОК под одним электрическим и магнитным экраном в термостабилизированном объеме, вследствие чего такой конденсатор все же правильнее рассматривать, как часть ЧЭ (фотодиод оптрона стоит перед конденсатором исключительно для удобства построения чертежа);
С2 - конденсатор, на который замкнута КО (здесь уместны рассуждения, приведенные для C1);
 - вычисленное с учетом приближенных значений линейного и углового ускорений, а также угловой скорости (например, посредством сопоставления таких значений с полученными при калибровке датчика с ЧЭ, которые хранятся в П для разных температур ЧЭ или датчика) значение измеряемого линейного ускорения синхронно движущихся ОК и КО, вектор8 (8 - измеряется параллельная плоскости катушек составляющая вектора линейного ускорения) которого (предпочтительно) параллелен плоскости ОК или КО, если они плоские, и перпендикулярен их оси, если они пространственные, в том числе если они включают по несколько витков в ряд (отклики ОК и КО на осевое ускорение, как правило, более чем на порядок меньше их откликов на ускорение, перпендикулярное их оси);
- вычисленное с учетом приближенных значений линейного и углового ускорений, а также угловой скорости (например, посредством сопоставления таких значений с полученными при калибровке датчика с ЧЭ, которые хранятся в П для разных температур ЧЭ или датчика) значение измеряемого линейного ускорения синхронно движущихся ОК и КО, вектор8 (8 - измеряется параллельная плоскости катушек составляющая вектора линейного ускорения) которого (предпочтительно) параллелен плоскости ОК или КО, если они плоские, и перпендикулярен их оси, если они пространственные, в том числе если они включают по несколько витков в ряд (отклики ОК и КО на осевое ускорение, как правило, более чем на порядок меньше их откликов на ускорение, перпендикулярное их оси);
 - примерное (приблизительное) значение измеряемого линейного ускорения, определенное исходя из учета значений преобразованных сигналов ОК и КО (например, из учета их суммы) или какой-то одной из них, а также примерных значений угловой скорости9 (9 - здесь еще раз уместно подчеркнуть одновременность влияния практически всех характеристик движения на выходные сигналы ОК и КО) и ее динамики (и углового ускорения);
- примерное (приблизительное) значение измеряемого линейного ускорения, определенное исходя из учета значений преобразованных сигналов ОК и КО (например, из учета их суммы) или какой-то одной из них, а также примерных значений угловой скорости9 (9 - здесь еще раз уместно подчеркнуть одновременность влияния практически всех характеристик движения на выходные сигналы ОК и КО) и ее динамики (и углового ускорения);
 - вычисленное с учетом приближенных значений линейного и углового ускорений, а также угловой скорости (например, аналогичным представленному по отношению к
- вычисленное с учетом приближенных значений линейного и углового ускорений, а также угловой скорости (например, аналогичным представленному по отношению к  образом) значение углового ускорения ОК и КО - предпочтительно ОК и КО следует устанавливать таким образом, чтобы ось предполагаемого вращения совпадала, насколько это возможно, с их осями, в этом случае будет иметься в виду угловое ускорение катушек при их вращении относительно собственных осей - в идеализированном случае - вокруг оси оо, с которой такие оси совпадают;
образом) значение углового ускорения ОК и КО - предпочтительно ОК и КО следует устанавливать таким образом, чтобы ось предполагаемого вращения совпадала, насколько это возможно, с их осями, в этом случае будет иметься в виду угловое ускорение катушек при их вращении относительно собственных осей - в идеализированном случае - вокруг оси оо, с которой такие оси совпадают;
 - примерное значение измеряемого углового ускорения, определенное исходя из динамики изменения примерного значения угловой скорости;
- примерное значение измеряемого углового ускорения, определенное исходя из динамики изменения примерного значения угловой скорости;
F - морозильник (помимо морозильника ЧЭ может включать и нагреватель), предназначенный для поддержания токопроводящих элементов ОК и КО при постоянной температуре (как можно более низкой), может быть связан с МК;
i - ток, протекающий через катушку электромагнита (может быть постоянным, может быть импульсным, может быть переменным);
m1 - направление «намотки» КО, совпадающее с направлением хода часовой стрелки;
m2 - направление «намотки» ОК, противоположное направлению хода часовой стрелки;
N - северный полюс электромагнита (не обязательно стационарный);
оо - ось, с которой в идеализированном случае совпадают оси катушек;
S - южный полюс электромагнита (не обязательно стационарный);
р - расстояние между катушками (для плоских катушек - это расстояние между их плоскостями, которые должны быть параллельны, для пространственных - это расстояние между наиболее близкими их токопроводящими частями), в подавляющем числе практических применений t должно быть как можно меньшим (насколько это позволяет конструктивное исполнение, в частности габариты экранов, сердечников);
t°C - связанный с П или непосредственно с МК термодатчик, сигнал которого отражает температуру ОК и/или КО (в термодатчик может быть включена пара датчиков температуры - по одному на каждую катушку);
 - значение угловой скорости ОК и КО, вычисленное с учетом примерных значений линейного и углового ускорений, а также с учетом примерного значения угловой скорости;
- значение угловой скорости ОК и КО, вычисленное с учетом примерных значений линейного и углового ускорений, а также с учетом примерного значения угловой скорости;
 - примерное значение угловой скорости ОК и КО, вычисленное с учетом различия сигналов ОК и КО.
- примерное значение угловой скорости ОК и КО, вычисленное с учетом различия сигналов ОК и КО.
А - вход МК (для программирования/«прошивки»);
В - вход П (для записи в П корректирующих коэффициентов  , где
, где  - сигнал ИЦ, несущий информацию о примерном значении линейного ускорения,
- сигнал ИЦ, несущий информацию о примерном значении линейного ускорения,  - сигнал ИЦ′, несущий информацию о примерных значениях угловых скорости и ускорения,
- сигнал ИЦ′, несущий информацию о примерных значениях угловых скорости и ускорения,  - сигнал термодатчика, несущий информацию о температуре ОК и/или КО;
- сигнал термодатчика, несущий информацию о температуре ОК и/или КО;
АПФ - активный полосовой фильтр (упоминался выше), на который подается преобразованный ППФ сигнал от внутреннего вывода ОК, такой фильтр может включать пару подстроечных резисторов для задания верхней и нижней частот фильтра;
АПФ′ - то же, что и АПФ, но для КО;
ИЦ - измерительная электрическая цепь, преобразующая выходной сигнал У и, возможно, У′ с учетом выходного сигнала ИЦ′ в примерное значение линейного ускорения;
ИЦ′ - измерительная электрическая цепь, преобразующая выходные сигналы У и У′ в примерные значения угловой скорости и углового ускорения как производной от угловой скорости;
МК - решающее устройство - микроконтроллер или микропроцессор, например программируемый, предназначенный для вычисления точных (в пределах погрешности датчика) значений угловой скорости, а также углового и линейного ускорений ОК и КО на основании их примерных значений с учетом данных, полученных при калибровке датчика;
П - энергонезависимая (электронная) П, в которой могут храниться данные, полученные при калибровке датчика (при сравнении его показаний с показаниями эталонного датчика);
ППФ - пассивный полосовой фильтр (достаточно пары R-C цепочек), на который подается сигнал от внутреннего (в соответствии с чертежами) вывода ОК, при «заземленном» внешнем выводе (внизу чертежа слева), как правило, это фильтр низкой частоты;
ППФ′ - то же, что и ППФ, но для КО;
У - усилитель преобразованного ППФ и АПФ сигнала ОК;
У′ - то же, что и У, но для КО.
Реализовано представленное изобретение может быть следующим образом.
Используют ОК 2 (фиг. 1) и как минимум одну КО 5.
В качестве выходных сигналов ЧЭ используют сигналы, получаемые от упомянутых катушек (этому случаю и соответствует фиг. 1).
Возможно и другое исполнение, при котором посредством сердечника 11 (фиг. 2) обеспечивают связь ОК с ДК, имеющей верхний 7 и нижний 8 выводы. Могут также обеспечить аналогичную связь КО 13 с ДК 14. В этом случае в ОК и КО возбуждают импульсный ток, например, посредством их подключения к генератору с подачей импульсного отрицательного напряжения к внутренним выводам катушек, тогда как в качестве сигналов ЧЭ используют сигналы, получаемые в том числе и от используемых ДК.
Импульсный ток могут возбуждать в ОК и/или КО и при использовании в качестве источников выходных сигналов ЧЭ самих таких катушек. Для этого, например, могут использовать оптроны типа 1 (фиг. 1), подключенные катодами к внутренним выводам ОК и КО при заземленных внешних.
Также ток в ОК и/или КО могут инициировать соответствующие ДК или электромагниты.
Так, к торцам сердечника электромагнита могут быть присоединены сердечники ОК и КО.
До выделения ПС из помех обработку выходных сигналов ЧЭ, соответствующих ОК и как минимум одной КО и/или используемым ДК, проводят раздельно.
Так, сигнал от ОК может последовательно проходить по каналу, включающему ППФ, АПФ и У, тогда как сигнал от КО по независимому от первого каналу, включающему ППФ′, АПФ′ и У′.
Благодаря этому обеспечивают возможность сопоставления ПС, связанных с ОК и с как минимум одной КО друг с другом.
Для сопоставления сигналов используют электронную цепь 6 сравнения ПС, посредством которой находят (и при необходимости усиливают) различие в них.
По такому различию определяют приблизительное значение как минимум одной характеристики из упомянутых.
Это могут сделать, например, с использованием измерительной электронной цепи ИЦ′.
Так, например, в соответствии со схемой, представленной на фиг. 1, на выходе цепи сравнения получают аналоговый или цифровой сигнал, несущий информацию о примерном текущем значении угловой скорости ОК и КО (косвенно здесь скрыта и информация об угловом ускорении, в которое проецируется динамика изменения угловой скорости).
По самим же ПС, не проводя оценки их различия, с учетом только что упомянутого приблизительного значения, которое было определено на предыдущем шаге (и/или с учетом также динамики изменения такого значения), определяют приблизительное значение как минимум одной другой характеристики из упомянутых, например линейного ускорения.
Для этого могут использовать другую измерительную электронную цепь ИЦ, на вход которой поступает ПС от У и выходной сигнал от ИЦ′.
ИЦ может входить в состав ИЦ′, тогда как последний - в состав цепи сравнения.
С учетом указанных приблизительных значений угловой скорости, углового ускорения и линейного ускорения с использованием МК или МК и П определяют точные значения упомянутых характеристик, учитывая наиболее вероятную (в текущих условиях при текущих абсолютных величинах) связь точных значений с приблизительными.
Точные значения могут определять и по значениям ПС, минуя определение приблизительных значений.
Предварительно (перед использованием по назначению, на производстве, при сдаче в эксплуатацию и проч.) могут проводить калибровку датчика с использованием эталонного средства измерения упомянутых характеристик (например, с использованием инерциальной навигационной системы).
Датчик и эталонное средство измерения перед калибровкой должны объединить друг с другом в систему таким образом, чтобы они двигались как одно целое.
Так, например, датчик могут жестко прикрепить к летательному аппарату, на котором установлена упомянутая инерциальная навигационная система.
Полученную систему датчик-эталон приводят в различные движения, соответствующие возможным движениям объекта, характеристики движения которого подлежат определению при эксплуатации датчика.
В процессе таких движений определяют и указанные приблизительные значения, полученные с помощью датчика, и точные значения упомянутых характеристик, полученные с помощью эталонного средства.
Для этого к портам А и Б датчика могут подключить, например, компьютер, связанный с инерциальной навигационной системой.
Используя программное обеспечение, устанавливают соответствие точных значений приблизительным, которое в электронном виде сохраняют в П датчика.
Могут находить функционал, связывающий последние с первыми, который в виде машинной программы могут записывать в МК датчика.
При эксплуатации учитывают установленное соответствие и/или используют найденный функционал для вычисления по приблизительным значениям точных.
В состав ЧЭ или датчика могут включить термодатчик t°C, предназначенный для определения температуры ЧЭ или датчика.
При этом, осуществляя калибровку, изменяют температуру датчика и определяют связь с последней изменения обозначенных соответствия и/или функционала.
После этого могут устанавливать дополнительные соответствия (например, поправочные коэффициенты) указанных приблизительных значений, полученных с помощью датчика, и точных значений, полученных с помощью эталонного средства для различных температур, и/или находят дополнительные функционалы для различных температур, связывающие последние с первыми, и/или определяют корректирующие коэффициенты для функционала, упомянутого первым.
Новые или дополнительные соответствия либо функционалы соответственно сохраняют обозначенным образом в П или МК.
Полученные корректирующие коэффициенты учитывают при сохранении функционала, упомянутого первым.
При эксплуатации учитывают показания термодатчика, для чего обеспечивают связь последнего с П и/или МК (при этом активируют соответствующие текущей температуре соответствия или функционалы или используют полученные поправочные или корректирующие коэффициенты).
Устройство ЧЭ, минимально достаточного для реализации представленного способа должно предполагать использование жестко связанных друг с другом ОК и КО (9, 13 фиг. 2; 19, 22 фиг. 4; 39, 45 фиг. 5), намотанных в различных направлениях и расположенных относительно друг друга таким образом, чтобы в пределах заданной точности, заложенной при проектировании ЧЭ, а также реализованной при изготовлении его деталей и их сборке в конечное изделие, оси катушек совпадали и определяли положение оси ЧЭ оо.
ОК и КО могут быть выполнены в виде плоских спиралей и лежать на одной плоскости (будучи напыленными на одну подложку), при этом ОК может окружать КО или наоборот (фиг. 7). Верхний вывод КО при этом может быть электрически соединен внутренним ОК, и оба они могут быть заземлены. При этом перед подачей на цепь сравнения один из полезных сигналов может быть инвертирован.
ОК и КО могут быть намотаны в произвольных направлениях, при расположении катушек относительно друг друга таким образом, чтобы в пределах заданной точности, заложенной при проектировании чувствительного элемента, а также реализованной при изготовлении его деталей и их сборке в конечное изделие, оси катушек были параллельны, но не совпадали друг с другом, а находились на заданном расстоянии, превышающем размер любой из них.
Катушки при этом могут быть расположены друг рядом с другом на одном уровне (фиг. 8).
Для этого могут использовать центрирующий узел 31 (фиг. 4) или центрирующую деталь 36 (фиг. 5), обеспечивающие упомянутую точность взаимного расположения катушек.
ОК и/или КО заключают в экран 16, 17 (фиг. 4), 37, 38 (фиг. 5), внутри которого размещают магнит, например электромагнит с катушкой 4 и сердечником 3 фиг. 1.
ОК и/или КО заключают в экран, внутри которого размещают конденсатор (см. фиг. 1), на который такая катушка замкнута.
Катушки размещают на замкнутых тороидальных сердечниках типа 11 (фиг. 2).
Тороидальные сердечники располагают относительно друг друга таким образом, что на виде с боку на них (фиг. 2) один большей своей частью располагается над осью катушек, а другой - под ней.
Катушки размещают на замкнутом сердечнике 15 (фиг. 3), причем сердечник выполняют такой формы, что, входя в одну катушку справа, в другую он входит уже слева.
Между катушками располагают несколько слоев 21 (фиг. 4) различного материала, жестко связанных между собой.
ОК и КО могут быть выполнены плоскими.
На сердечниках могут быть расположены ДК типа 14 (фиг. 2).
ОК и КО могут быть выполнены плоскими, тогда как ДК могут быть намотаны вдоль оси сердечника в один ряд.
Одна из ДК может находиться слева от ОК и КО над их осью, а другая - справа под осью, причем плоскости ОК и КО не должны пересекать дополнительные катушки.
Сердечник, на котором расположены и ОК и КО может быть выполнен в виде несвязанной в середине цифры 8 (фиг. 3).
ДК на таком сердечнике может быть расположена на максимальном удалении от середины сердечника, ассоциируемой с серединой упомянутой цифры, в которой она не сомкнута.
Между ОК и КО может находиться многослойная прокладка или подложка 51 (фиг. 6).
Роль прокладки или подложки может выполнять многослойная плата.
Подложка может быть выполнена в виде планарной сборки керамических пластин.
В центре такой сборки может быть размещена как минимум одна пластина из ферромагнетика.
В центре такой сборки могут быть размещены и пластины из различных ферромагнетиков.
Между ОК и КО может быть размещен многослойный фрагмент как минимум одного экрана.
ОК и КО могут включать незамкнутые сердечники.
ОК и КО, будучи намотанными в произвольных направлениях, могут быть расположены друг рядом с другом. Так, одна из катушек может находиться в области, границы которой удалены не более чем на 50 максимальных диаметров такой катушки от другой.
Катушки могут быть расположены приблизительно (например, в пределах наружного диаметра меньшей из них) на одном уровне.
Оси катушек желательно разносить на расстояние, превышающее половину суммы максимальных размеров катушек.
Катушки с несовпадающими осями лучше выполнять плоскими спиральными.
Катушки с разнесенными осями могут быть намотаны в разных направлениях, при этом их может объединять общий тороидальный сердечник. Предпочтительно, чтобы такие катушки были плоскими спиральными и лежали в одной плоскости.
Одна из катушек с разнесенными осями может быть окружена другой. И в этом случае предпочтительно, чтобы такие катушки были плоскими спиральными и лежали в одной плоскости (фиг. 9, 10, 11).
Расстояние между осями катушек может превосходить полусумму (половину суммы) их наибольших диаметров, но не превышает 10 максимальных диаметров любой из них.
ЧЭ может включать вспомогательную плоскую опорную катушку, жестко связанную аналогичным образом с упомянутыми здесь первыми, притом что вспомогательная катушка должна быть расположена таким образом, чтобы в пределах заданной точности, заложенной при проектировании чувствительного элемента, а также реализованной при изготовлении его деталей и их сборке в конечное изделие, ее ось была параллельна осям катушек, упомянутых здесь первыми, причем вспомогательная катушка должна быть расположена таким образом, чтобы перпендикуляры к серединам трех отрезков, связывающих центры все трех катушек, не пересекались в одной точке (фиг. 11).
ОК и КО могут быть жестко связаны друг с другом и посредством протяженной развитой жесткой конструкции. Катушки при этом должны быть расположены относительно друг друга таким образом, чтобы в пределах заданной точности, заложенной при проектировании ЧЭ и реализованной при изготовлении его деталей, а также при их сборке в конечное изделие и установке самих катушек на упомянутой конструкции, оси катушек были параллельны. Причем такие катушки должны быть расположены на значительном удалении друг от друга, более чем в 50 раз превосходящем диаметр любой из них (фиг. 12).
И в этом случае может быть использована как минимум одна аналогичная вспомогательная опорная катушка, только расстояние от нее до ближайшей из упомянутых первыми (основной и опорной) должно уже более чем в 50 раз превосходить диаметр любой из них.
Условие непересечения перпендикуляров к серединам отрезков, соединяющих центры всех трех катушек, актуально и здесь, хотя все три катушки в данном случае целесообразно располагать на разных уровнях.
Достижение заявленного технического результата предопределено ориентацией полезной модели на электроинерционные, и/или центробежные, и/или магнитные явления и эффекты, в частности на инерционное и/или центробежное движение свободных носителей заряда (в основном речь идет об электронах, но никак не о ионах) относительно содержащего их тела, что позволяет полностью отказаться от использования в датчике подвижных деталей, узлов и молекулярных сред, таких как, например, вода.
ПС при использовании такого способа являются откликами катушек, предопределенными указанными явлениями и эффектами. При этом не важно, инициируется в ОК или КО импульсы тока или свободные носители заряда предоставлены в них сами себе, в любом случае изменение во времени выходного сигнала (например, тока) катушек в том числе будет зависеть и от упомянутых характеристик движения.
Особенности определения упомянутых характеристик движения, основанного на указанных явлениях и эффектах, связанных с аддитивным наложением различных характеристик движения на выходной сигнал катушек, требуют применения специально подхода для дифференцирования таких накладывающихся характеристик. Эту задачу и решает представленный способ.
Лучший вариант его реализации для минимального набора определяемых характеристик предполагает использование трех главных катушек, две из которых расположены оппозитно - одна под другой - и намотаны в разных направлениях, при расположении третьей рядом с одной из упомянутых первыми при одинаковом направлении намотки. Оси всех трех катушек должны быть параллельны, причем оси первых двух должны совпадать.
Отклик главных катушек, расположенных на одном уровне (в одной плоскости для плоских катушек), на линейные ускорения будет одинаков, тогда как на угловые будет отличаться и зависеть от расстояния от оси катушки до оси вращения (из этого соображения следует выбирать и расстояние между такими катушками).
Целесообразно также к трем главным катушкам прибавить четвертую, ось которой перпендикулярна их осям (здесь следует вновь отметить существенно большее влияние на полезный сигнал линейных ускорений, лежащих в плоскости витков катушек).
Практические эксперименты показали целесообразность использования для реализации представленного способа ЧЭ, выполненных в соответствии с представленными устройствами, каждое из которых предназначено для решения своей, в общем-то, уникальной задачи.
Изобретение относится к измерительной технике и может быть использовано при определении характеристик движения объекта (скорости, ускорения). Способ предполагает применение включающего чувствительный элемент датчика с основной катушкой индуктивности. При этом используют опорную катушку индуктивности, а в качестве выходных сигналов чувствительного элемента используют либо сигналы, получаемые от упомянутых катушек, либо посредством сердечника обеспечивают связь как минимум одной из упомянутых катушек с как минимум одной дополнительной катушкой. Причем в катушках, упомянутых первыми, связанных посредством сердечника с дополнительными катушками, возбуждают ток, при этом в качестве сигналов чувствительного элемента используют сигналы, получаемые в том числе и от используемых дополнительных катушек, в то время как до выделения полезных сигналов из помех обработку выходных сигналов чувствительного элемента, соответствующих основной и как минимум одной опорной катушке, проводят раздельно, благодаря чему обеспечивают возможность сопоставления полезных сигналов, связанных с основной и как минимум одной опорной катушкой, друг с другом, для чего используют электронную цепь сравнения полезных сигналов, посредством которой находят различие в них. Далее либо по нему определяют приблизительное значение как минимум одной характеристики из упомянутых, для чего используют измерительную электронную цепь, которая может быть совмещена с упомянутой цепью сравнения, тогда как по самим полезным сигналам, с учетом только что упомянутого приблизительного значения и/или с учетом динамики изменения такого значения определяют приблизительное значение как минимум одной другой характеристики из упомянутых, для чего также используют измерительную электронную цепь либо дополнительную, либо упомянутую первой, либо по полезным сигналам и упомянутому различию и/или по его динамике с использованием электронного аналогового или цифрового решающего устройств или таковых и энергонезависимой памяти определяют точные значения упомянутых характеристик. Технический результат заключается в повышении надежности работы датчиков за счет исключения из них подвижных деталей, узлов или молекулярных сред. 11 н. и 27 з.п. ф-лы, 12 ил.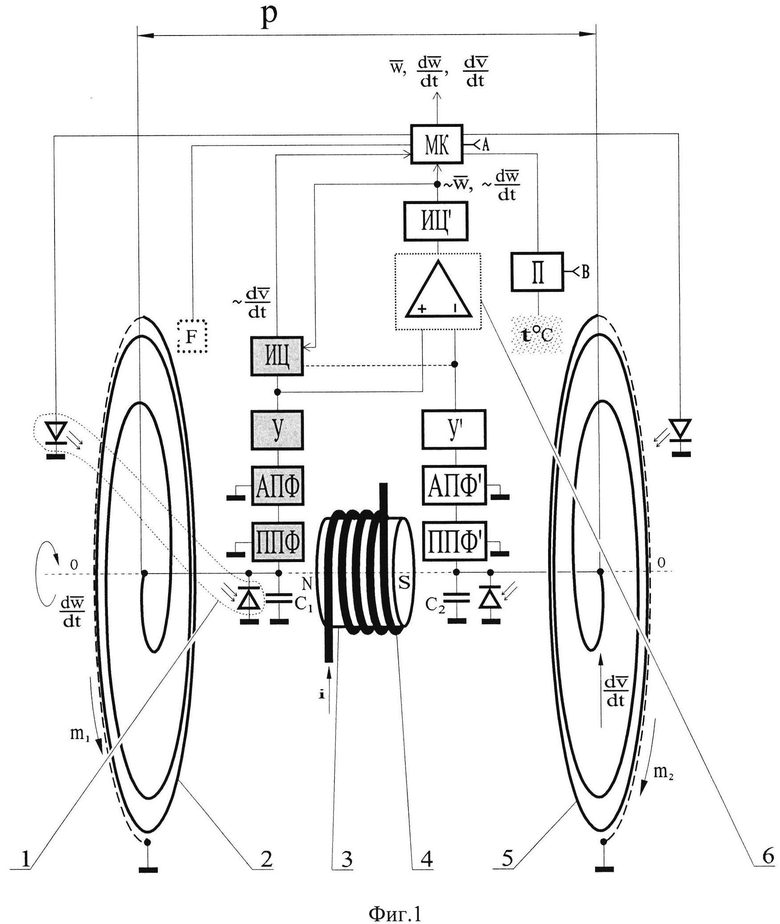
1. Способ определения характеристик движения объекта, предполагающий применение включающего чувствительный элемент датчика с основной катушкой индуктивности, отличающийся тем, что используют как минимум одну опорную катушку индуктивности, притом что либо в качестве выходных сигналов чувствительного элемента используют сигналы, получаемые от упомянутых катушек, либо посредством сердечника обеспечивают связь как минимум одной из упомянутых катушек с как минимум одной дополнительной катушкой, причем в катушках, упомянутых первыми, связанных посредством сердечника с дополнительными катушками, возбуждают ток, при этом в качестве сигналов чувствительного элемента используют сигналы, получаемые в том числе и от используемых дополнительных катушек, в то время как до выделения полезных сигналов из помех обработку выходных сигналов чувствительного элемента, соответствующих основной и как минимум одной опорной катушке, проводят раздельно, благодаря чему обеспечивают возможность сопоставления полезных сигналов, связанных с основной и как минимум одной опорной катушкой, друг с другом, для чего используют электронную цепь сравнения полезных сигналов, посредством которой находят различие в них, и далее либо по нему определяют приблизительное значение как минимум одной характеристики из упомянутых, для чего используют измерительную электронную цепь, которая может быть совмещена с упомянутой цепью сравнения, тогда как по самим полезным сигналам с учетом только что упомянутого приблизительного значения и/или с учетом динамики изменения такого значения определяют приблизительное значение как минимум одной другой характеристики из упомянутых, для чего также используют измерительную электронную цепь либо дополнительную, либо упомянутую первой, либо по полезным сигналам и упомянутому различию и/или по его динамике с использованием электронного аналогового или цифрового решающего устройств или таковых и энергонезависимой памяти определяют точные значения упомянутых характеристик.
2. Способ по п. 1, отличающийся тем, что точные значения упомянутых характеристик определяют с учетом указанных приблизительных значений с использованием электронного аналогового или цифрового решающего устройств или таковых и энергонезависимой памяти.
3. Способ по п. 2, отличающийся тем, что предварительно проводят калибровку датчика с использованием эталонного средства измерения упомянутых характеристик, для чего датчик и эталонное средство измерения объединяют друг с другом в систему таким образом, чтобы они двигались как одно целое, и приводят полученную систему в различные движения, соответствующие возможным движениям объекта, в процессе которых определяют полезные сигналы, соответствующие основной и используемым опорным катушкам, и их различия или указанные приблизительные значения, полученные с помощью датчика, а также точные значения упомянутых характеристик, полученные с помощью эталонного средства, после чего устанавливают соответствие последних тем или другим первым, которое в электронном виде сохраняют в энергонезависимой памяти датчика, и/или находят функционал, связывающий последние с теми или другими первыми, который в виде машинной программы записывают в решающем устройстве датчика, тогда как при определении упомянутых характеристик объекта с помощью датчика учитывают установленное соответствие и/или используют найденный функционал для вычисления по упомянутым полезным сигналам или по приблизительным значениям точных значений.
4. Способ по п. 3, отличающийся тем, что в состав чувствительного элемента или датчика включают термодатчик, предназначенный для определения температуры чувствительного элемента или датчика, при этом, осуществляя калибровку, изменяют температуру датчика в пределах диапазона его рабочих температур и определяют связь с последней изменений обозначенных соответствия и/или функционала, после чего устанавливают дополнительные соответствия указанных полезных сигналов или приблизительных значений, полученных с помощью датчика, и точных значений, полученных с помощью эталонного средства для различных температур, и/или находят дополнительные функционалы для различных температур, связывающие последние с теми или другими первыми, и/или определяют позволяющие учитывать температуру корректирующие коэффициенты для функционала, упомянутого первым, которые соответственно сохраняют обозначенным образом в памяти или решающем устройстве либо учитывают при сохранении функционала, упомянутого первым, тогда как при определении упомянутых характеристик объекта с помощью датчика учитывают показания термодатчика, для чего обеспечивают связь последнего с памятью и/или решающим устройством.
5. Устройство чувствительного элемента датчика, предназначенного для реализации способа по п. 1, включающего жестко связанные друг с другом посредством жестких детали или конструкции основную и опорную катушки индуктивности, намотанные в различных направлениях, тогда как катушки расположены относительно друг друга таким образом, что в пределах заданной точности, заложенной при проектировании чувствительного элемента, а также реализованной при изготовлении его деталей и их сборке в конечное изделие, оси катушек совпадают, для чего чувствительный элемент включает центрирующий узел или центрирующую деталь, обеспечивающую упомянутую точность взаимного расположения катушек.
6. Устройство по п. 5, отличающееся тем, что обе катушки выполнены в виде плоских спиралей и лежат в одной плоскости, при этом основная катушка окружает опорную или наоборот.
7. Устройство чувствительного элемента датчика, предназначенного для реализации способа по п. 1, включающего жестко связанные друг с другом посредством жестких детали или конструкции основную и опорную катушки индуктивности, намотанные в произвольных направлениях, тогда как катушки расположены относительно друг друга таким образом, что в пределах заданной точности, заложенной при проектировании чувствительного элемента, а также реализованной при изготовлении его деталей и их сборке в конечное изделие, оси катушек параллельны, но не совпадают друг с другом.
8. Устройство по п. 7, отличающееся тем, что оси катушек находятся на заданном расстоянии друг от друга, превышающем полусумму их максимальных диаметров, тогда как одна из катушек находится в области, границы которой удалены не более чем на 50 максимальных диаметров от другой, и при этом катушки расположены на одном уровне с точностью, соизмеримой с суммарной длиной катушек.
9. Устройство чувствительного элемента датчика, предназначенного для реализации способа по п. 1, включающего жестко связанные друг с другом посредством жестких детали или конструкции основную и опорную катушки индуктивности, или намотанные в различных направлениях, тогда как катушки расположены относительно друг друга таким образом, что в пределах заданной точности, заложенной при проектировании чувствительного элемента, а также реализованной при изготовлении его деталей и их сборке в конечное изделие, оси катушек совпадают, или намотанные в произвольных направлениях, тогда как катушки расположены относительно друг друга таким образом, что в пределах заданной точности, заложенной при проектировании чувствительного элемента, а также реализованной при изготовлении его деталей и их сборке в конечное изделие, оси катушек параллельны, но не совпадают друг с другом, а находятся на заданном расстоянии, превышающем полусумму их максимальных диаметров, и при этом катушки расположены друг рядом с другом на одном уровне, притом что как минимум одна из катушек заключена в экран, внутри которого размещен магнит.
10. Устройство чувствительного элемента датчика, предназначенного для реализации способа по п. 1, включающего жестко связанные друг с другом посредством жестких детали или конструкции основную и опорную катушки индуктивности, или намотанные в различных направлениях, тогда как катушки расположены относительно друг друга таким образом, что в пределах заданной точности, заложенной при проектировании чувствительного элемента, а также реализованной при изготовлении его деталей и их сборке в конечное изделие, оси катушек совпадают, или намотанные в произвольных направлениях, тогда как катушки расположены относительно друг друга таким образом, что в пределах заданной точности, заложенной при проектировании чувствительного элемента, а также реализованной при изготовлении его деталей и их сборке в конечное изделие, оси катушек параллельны, но не совпадают друг с другом, а находятся на заданном расстоянии, превышающем полусумму их максимальных диаметров, и при этом катушки расположены друг рядом с другом на одном уровне, притом что как минимум одна из катушек заключена в экран, внутри которого размещен конденсатор, на который такая катушка замкнута.
11. Устройство чувствительного элемента датчика, предназначенного для реализации способа по п. 1, включающего жестко связанные друг с другом посредством жестких детали или конструкции основную и опорную катушки индуктивности, намотанные в различных направлениях, тогда как катушки расположены относительно друг друга таким образом, что в пределах заданной точности, заложенной при проектировании чувствительного элемента, а также реализованной при изготовлении его деталей и их сборке в конечное изделие, оси катушек совпадают, притом что катушки размещены на замкнутых тороидальных сердечниках, причем сердечники расположены относительно друг друга таким образом, что на виде с боку на сердечники один из них располагается большей своей частью над осью катушек, а другой - под ней.
12. Устройство по п. 11, отличающееся тем, что основная и опорная катушки выполнены плоскими.
13. Устройство по п. 11, отличающееся тем, что на упомянутых сердечниках расположены дополнительные катушки.
14. Устройство по п. 13, отличающееся тем, что основная и опорная катушки выполнены плоскими, тогда как дополнительные катушки намотаны вдоль оси сердечника в один ряд.
15. Устройство по п. 14, отличающееся тем, что одна из дополнительных катушек находится слева от основной и опорной катушек над их осью, а другая - справа под осью, причем плоскости основной и опорной катушек не пересекают дополнительные катушки.
16. Устройство чувствительного элемента датчика, предназначенного для реализации способа по п. 1, включающего жестко связанные друг с другом посредством жестких детали или конструкции основную и опорную катушки индуктивности, намотанные в разных направлениях, тогда как катушки расположены относительно друг друга таким образом, что в пределах заданной точности, заложенной при проектировании чувствительного элемента, а также реализованной при изготовлении его деталей и их сборке в конечное изделие, оси катушек параллельны, но не совпадают друг с другом, а находятся на заданном расстоянии друг от друга, превышающем полусумму их максимальных диаметров, и при этом катушки расположены на одном уровне с точностью, соизмеримой с суммарной длиной катушек, причем основная и опорная катушки расположены на одном замкнутом тороидальном сердечнике.
17. Устройство по п. 16, отличающееся тем, что основная и опорная катушки сделаны плоскими и лежат в одной плоскости с учетом возможностей их исполнения.
18. Устройство чувствительного элемента датчика, предназначенного для реализации способа по п. 1, включающего жестко связанные друг с другом посредством жестких детали или конструкции основную и опорную катушки индуктивности, намотанные в различных направлениях, тогда как катушки расположены относительно друг друга таким образом, что в пределах заданной точности, заложенной при проектировании чувствительного элемента, а также реализованной при изготовлении его деталей и их сборке в конечное изделие, оси катушек совпадают, притом что катушки размещены на замкнутом сердечнике, причем сердечник выполнен такой формы, что, входя в одну катушку справа, в другую он входит уже слева.
19. Устройство по п. 18, отличающееся тем, что сердечник выполнен в виде несвязанной в середине цифры 8.
20. Устройство по п. 18, отличающееся тем, что основная и опорная катушки выполнены плоскими.
21. Устройство по п. 18, отличающееся тем, что на упомянутом сердечнике расположена как минимум одна дополнительная катушка.
22. Устройство по п. 21, отличающееся тем, что основная и опорная катушки выполнены плоскими, тогда как дополнительная катушка намотана вдоль оси сердечника в один ряд.
23. Устройство по любому из пп. 21 или 22, отличающееся тем, что сердечник выполнен в виде несвязанной в середине цифры 8, тогда как дополнительная катушка расположена на максимальном удалении от середины сердечника, ассоциируемой с серединой упомянутой цифры, в которой она не сомкнута.
24. Устройство чувствительного элемента датчика, предназначенного для реализации способа по п. 1, включающего жестко связанные друг с другом посредством жестких детали или конструкции основную и опорную катушки индуктивности, намотанные в различных направлениях, тогда как катушки расположены относительно друг друга таким образом, что в пределах заданной точности, заложенной при проектировании чувствительного элемента, а также реализованной при изготовлении его деталей и их сборке в конечное изделие, оси катушек совпадают, притом что между катушками расположено несколько слоев различного материала, жестко связанных между собой.
25. Устройство по п. 24, отличающееся тем, что между катушками находится многослойная прокладка или подложка.
26. Устройство по п. 25, отличающееся тем, что роль прокладки или подложки выполняет многослойная плата.
27. Устройство по п. 26, отличающееся тем, что подложка выполнена в виде планарной сборки керамических пластин.
28. Устройство по п. 26, отличающееся тем, что подложка выполнена в виде планарной сборки керамических пластин, в центре которой размещена как минимум одна пластина из ферромагнетика.
29. Устройство по п. 26, отличающееся тем, что подложка выполнена в виде планарной сборки керамических пластин, в центре которой размещены пластины из различных ферромагнетиков.
30. Устройство по п. 24, отличающееся тем, что между катушками размещен многослойный фрагмент как минимум одного экрана.
31. Устройство по п. 24, отличающееся тем, что катушки включают незамкнутые сердечники.
32. Устройство чувствительного элемента датчика, предназначенного для реализации способа по п. 1, включающего жестко связанные друг с другом посредством жестких детали или конструкции основную и опорные катушки индуктивности, намотанные в произвольных направлениях, тогда как катушки расположены относительно друг друга таким образом, что в пределах заданной точности, заложенной при проектировании чувствительного элемента, а также реализованной при изготовлении его деталей и их сборке в конечное изделие, оси катушек параллельны, но не совпадают, тогда как одна из катушек окружена другой.
33. Устройство по п. 32, отличающееся тем, что катушки выполнены плоскими спиральными и лежат в одной плоскости.
34. Устройство по любому из пп. 32 или 33, отличающееся тем, что оно включает вспомогательную плоскую опорную катушку, жестко связанную аналогичным образом с упомянутыми здесь первыми основной и опорной, притом что вспомогательная катушка расположена таким образом, что в пределах заданной точности, заложенной при проектировании чувствительного элемента, а также реализованной при изготовлении его деталей и их сборке в конечное изделие, ее ось параллельна осям катушек, упомянутых здесь первыми, причем вспомогательная катушка расположена таким образом, что перпендикуляры к серединам отрезков, связывающих центры катушек, не пересекаются в одной точке.
35. Устройство чувствительного элемента датчика, предназначенного для реализации способа по п. 1, включающего жестко связанные друг с другом посредством протяженной жесткой конструкции основную и опорную катушки индуктивности, тогда как катушки расположены относительно друг друга таким образом, что в пределах заданной точности, заложенной при проектировании чувствительного элемента и реализованной при изготовлении его деталей, а также при их сборке в конечное изделие и установке самих катушек на упомянутой конструкции, оси катушек параллельны, и при этом катушки расположены на значительном удалении друг от друга, более чем в 50 раз превосходящем диаметр любой из них.
36. Устройство по п. 35, отличающееся тем, что оно включает как минимум одну вспомогательную плоскую опорную катушку, жестко связанную аналогичным образом с упомянутыми здесь первыми, притом что вспомогательная катушка расположена таким образом, что в пределах заданной точности, заложенной при проектировании чувствительного элемента и реализованной при изготовлении его деталей, а также при их сборке в конечное изделие и установке самих катушек на упомянутой конструкции, ее ось параллельна осям катушек, упомянутых здесь первыми, тогда как расстояние от вспомогательной катушки до ближайшей из упомянутых здесь первыми более чем в 50 раз превосходит диаметр любой из них.
37. Устройство по п. 36, отличающееся тем, что основная и опорная катушка выполнены плоскими, а вспомогательная катушка расположена таким образом, что перпендикуляры к серединам отрезков, связывающих центры катушек, не пересекаются в одной точке.
38. Устройство по п. 36, отличающееся тем, что все катушки расположены на разных уровнях.
| ПРИСПОСОБЛЕНИЕ К ШВЕЙНЫМ МАШИНАМ ДЛЯ ПОЛУЧЕНИЯ СПИРАЛЬНОЙ СТРОЧКИ, НАПРИМЕР, ПРИ ПРОШИВАНИИ ПОЛИРОВАЛЬНЫХ КРУГОВ ИЗ ТКАНИ | 1940 |
|
SU58233A1 |
| Машина для штемпелевания сброшированных телеграфных бланков | 1954 |
|
SU100832A1 |
| Устройство для защиты телевизионного приемника | 1990 |
|
SU1830193A3 |
| WO 2014092825 A1, 19.06.2014. | |||

