Изобретение относится к ракетной технике и может быть использовано в приводах рулевых ракет с жидкостным ракетным двигателем для второй и верхних ступеней, у которых двигатель и привод рулевой размещены в баке с компонентом топлива предыдущей ступени.
Известен привод рулевой второй ступени, который размещен в баке окислителя первой ступени. См. «Морские стратегические ракетные комплексы», стр. 101. Издательство ООО «Военный Парад» - ОАО «ГРЦ Макеева», 2011 год, Москва. Этот привод рулевой ампулизированный, так как находится в агрессивной среде. Все стыки рулевых машин с системой питания выполнены неразъемными, сварными. Электрические кабели к рулевым машинам подведены в металлических трубах, а трубы приварены к элементам конструкции. Рулевые машины хвостовиками закреплены шарнирно к днищу корпуса ракеты, а штоками закреплены к качалкам узлов развязки через шарнирные подшипники. Корпуса узлов развязки закреплены к соплу двигателя. Жидкостной ракетный двигатель установлен на карданном подвесе, который закреплен на днище. Узел развязки представляет из себя корпус с пазом, в пазу на оси установлена качалка. Качалка выполнена в виде двухплечевого рычага с отверстиями, а на корпусе узла развязки установлена соосно с отверстием на качалке опорная ось, при этом диаметр отверстия на качалке выполнен больше диаметра оси на расчетный угол качания. На наружном периметре качалки выполнены профилированные выемки, а на корпусе узла развязки перпендикулярно к качалке установлены подпружиненные храповики, прижатые к качалке. При отклонении качалки на заданный расчетный угол или на опорную ось храповик входит в профилированную поверхность на качалке и заклинивает качалку относительно корпуса узла развязки, тем самым обеспечивается жесткая кинематическая связь между штоком рулевой машины и соплом двигателя.
Недостатками прототипа является:
1. Большой угол холостого отклонения качалки для обеспечения жесткой механической связи между штоком рулевой машины и соплом двигателя, что снижает точность установки нулевого положения рулевой машины.
2. В зацеплении храповика с качалкой возникают большие удельные давления ввиду линейного контакта храповика с качалкой. Это обусловлено особенностью конструкции храпового механизма.
Несмотря на указанные недостатки, вышеописанный привод рулевой принят в качестве прототипа.
Задачей, на решение которой направлено изобретение, является достижение технического эффекта за счет уменьшения холостого угла отклонения качалки до фиксации с храповиком и уменьшение удельного давления в месте контакта храповика с качалкой. Этот технический эффект достигается тем, что на корпусе узла развязки перпендикулярно к качалке установлен подпружиненный фиксатор, который при отклонении качалки на опорную ось входит в отверстие на качалке, выполненное соосно с отверстием на корпусе, обеспечивая жесткую кинематическую связь между штоком рулевой машины и соплом двигателя ракеты.
Сущность изобретения поясняется графическими материалами.
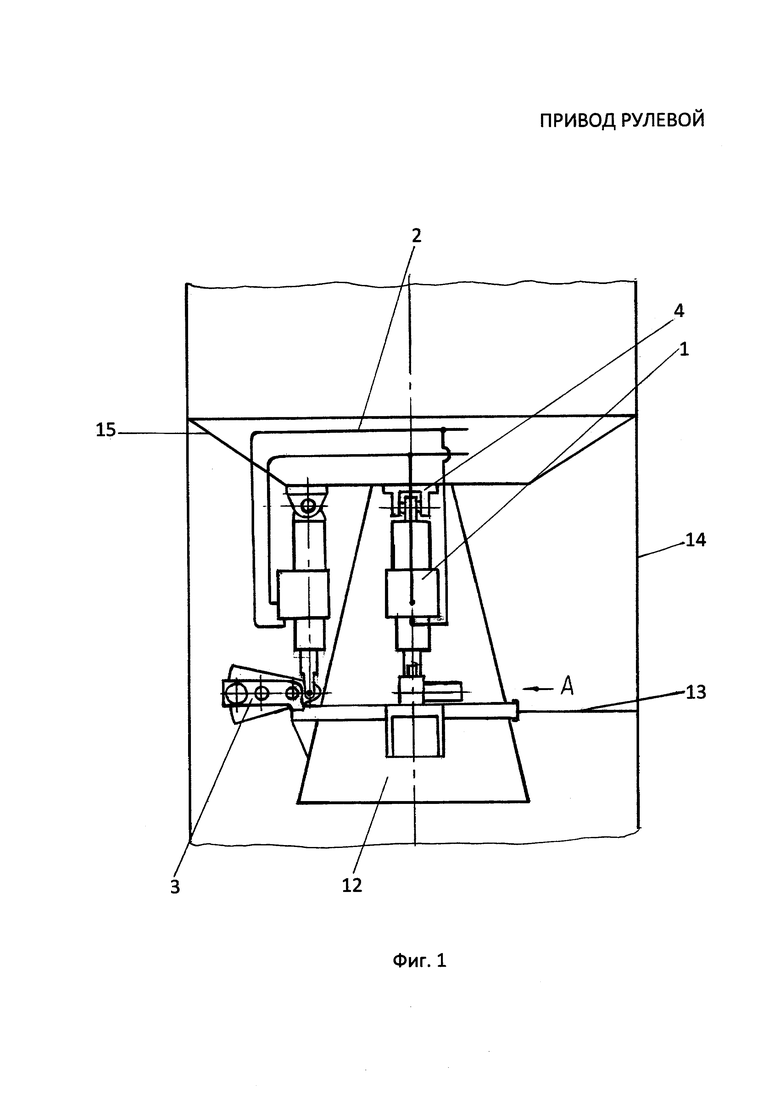
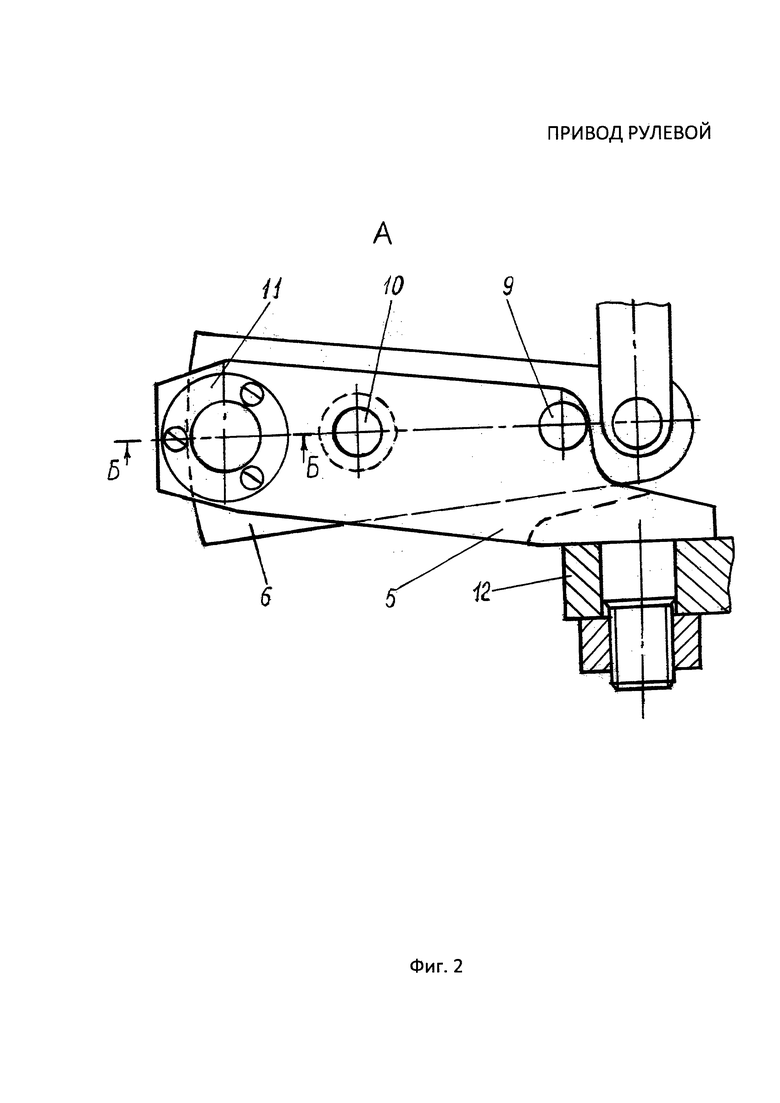
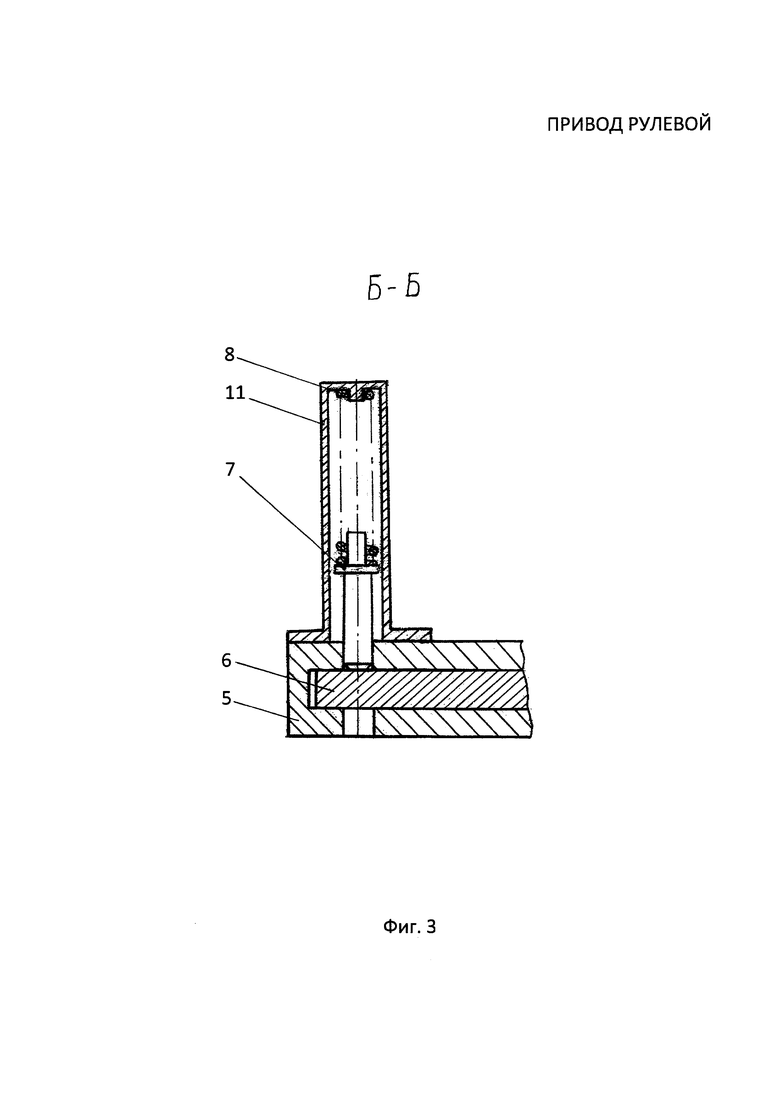
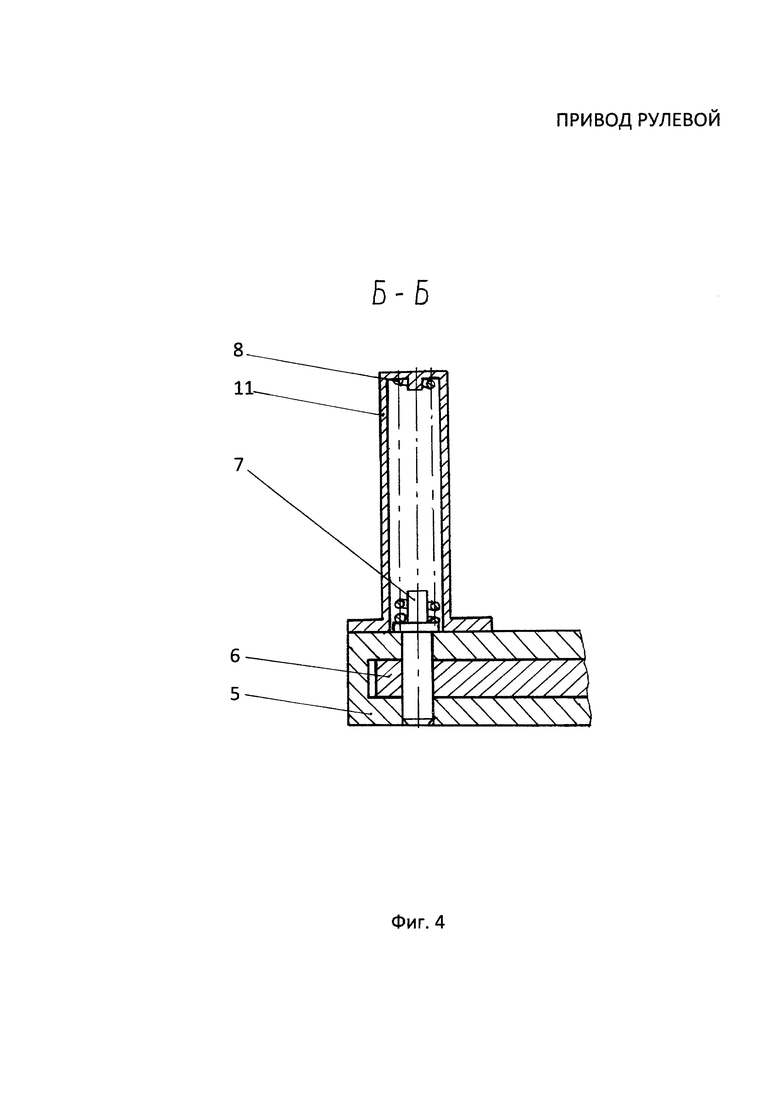
На фиг. 1 представлен привод рулевой в составе отсека ракеты. Привод рулевой состоит из рулевых машин 1, системы питания рулевых машин 2, узлов развязки 3, кронштейнов 4, закрепленных на днище 15. На фиг. 2 и 3 показан узел развязки 3, который состоит из корпуса 5, качалки 6, фиксатора 7, пружины 8, оси 9, опорной оси 10, кожуха 11. Корпус 5 узла развязки 3 закреплен к соплу 12 двигателя, а качалка 6 соединена со штоком рулевой машины 1 с помощью шарнирных подшипников. На фиг. 3 показан узел развязки 3, в положении, когда фиксатор 7 оперт на качалку 6. При этом качалка 6 может поворачиваться относительно оси 9 на расчетный рабочий угол, не опираясь на опорную ось 10. На фиг. 4 показан узел развязки 3 в положении, когда качалка повернута на опорную ось 10 и фиксатор 7 под действием пружины 8 вошел в отверстие на качалке 6. При этом фиксатор 7 соединяет качалку 6 с корпусом 5, обеспечивая жесткую кинематическую связь между штоком рулевой машины и соплом двигателя ракеты.
Предлагаемый привод рулевой работает следующим образом. При хранении, транспортировке и перегрузках ракеты узлы развязки 3 на рулевом приводе находятся в положении, как показано на фиг. 3. Жесткая кинематическая связь между рулевой машиной 1 и соплом 12 двигателя отсутствует, при этом мембрана и шток рулевой машины 1 не нагружаются. Силы, нагружающие шток и мембрану рулевой машины 1, могли бы возникнуть при перегрузках ракеты, когда появляется прогиб корпуса ракеты, а сопло 12 двигателя закреплено к корпусу ракеты 14 опорами 13. Все возникающие перемещения сопла 12 компенсируются узлом развязки 3, так как фиксатор 7 оперт на качалку 6, которая может свободно поворачиваться в пределах заданного расчетного угла.
При работе рулевого привода, когда происходит разделение ступеней и запускается двигатель, рабочая жидкость от турбонасосного агрегата двигателя ракеты под давлением поступает в систему питания рулевых машин 2. Далее рабочая жидкость поступает на вход рулевых машин 1. Шток рулевой машины 1 по команде от системы управления ракеты выдвигается. При этом разрушается мембрана ампулизации на рулевой машине 1, а качалка 6 поворачивается относительно оси 9 до упора на опорную ось 10 и фиксатор 7 под действием пружины 8 входит в отверстие качалки 6, как показано на фиг. 4. Происходит соединение качалки 6 с корпусом 5 узла развязки и обеспечивается жесткая кинематическая связь между штоком рулевой машины и соплом двигателя ракеты.
Техническим результатом предлагаемого изобретения является улучшение точности фиксации рулевых машин в нулевом положении и повышение жесткости в передаче системы рулевая машина-сопло двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД РУЛЕВОЙ | 2021 |
|
RU2782870C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2020 |
|
RU2739660C1 |
| КОМПОНОВКА МНОГОСТУПЕНЧАТОЙ РАКЕТЫ-НОСИТЕЛЯ | 2009 |
|
RU2406660C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ВЫДВИЖНЫМ СОПЛОМ | 2016 |
|
RU2612691C1 |
| УСТРОЙСТВО ДЛЯ ФИКСАЦИИ КАМЕРЫ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2013 |
|
RU2530364C1 |
| РАКЕТНЫЙ ДВИГАТЕЛЬ ТВЕРДОГО ТОПЛИВА | 1996 |
|
RU2109160C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2524483C1 |
| МНОГОРАЗОВЫЙ УСКОРИТЕЛЬ ПЕРВОЙ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ | 1999 |
|
RU2148536C1 |
| Сопловой блок РДТТ | 2019 |
|
RU2729568C1 |
| РАСКРЫВАЕМОЕ КРЫЛО ДВУХСТУПЕНЧАТОЙ РАКЕТЫ | 2011 |
|
RU2478907C1 |
Изобретение относится к рулевым приводам многоступенчатых ракет. Привод рулевой содержит рулевые машины, систему питания рулевых машин, узлы развязки, кронштейны для закрепления рулевых машин к днищу ракеты. Узлы развязки закреплены к соплу двигателя. Сопло с помощью опор зафиксировано относительно корпуса ракеты. Узел развязки состоит из корпуса, качалки, фиксатора, пружины, опорной оси. Техническим результатом изобретения является повышение точности фиксации рулевых машин в нулевом положении и повышение жесткости в передаче системы рулевая машина - сопло двигателя. 4 ил.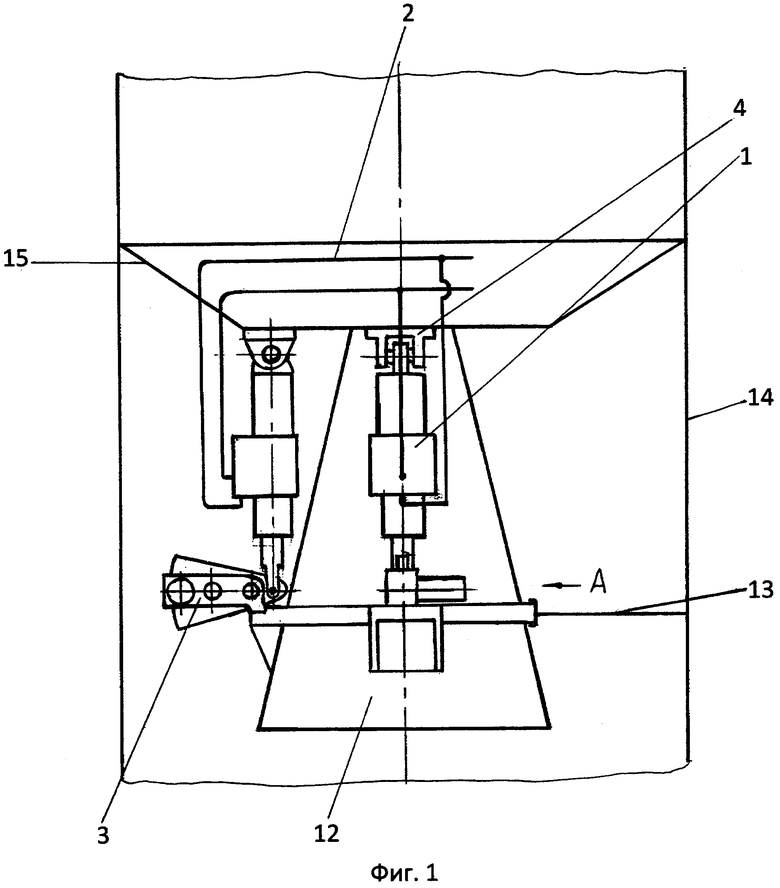
Привод рулевой для управления вектором тяги жидкостного ракетного двигателя, содержащий систему питания рулевых машин, ампулизированные рулевые машины, кронштейны для закрепления элементов рулевого привода, при этом между камерой сгорания двигателя ракеты и рулевой машиной установлен узел развязки, который выполнен в виде корпуса с пазом, внутри паза на одной оси закреплена качалка, другая опорная ось на корпусе закреплена неподвижно и качалка относительно опорной оси может качаться в пределах зазора между осью и отверстием на качалке, выполненным больше диаметра оси, обеспечивающим ее расчетный угол качания, отличающийся тем, что на кронштейне ближе к наружному периметру качалки, перпендикулярно к качалке установлен подпружиненный фиксатор, который при отклонении качалки на опорную ось входит в отверстие на качалке, выполненное соосно с отверстием на кронштейне, обеспечивая жесткую кинематическую связь между штоком рулевой машины и соплом двигателя ракеты.
| РУЛЕВОЙ ПРИВОД | 2001 |
|
RU2210681C2 |
| RU 2006141918 A, 10.06.2008 | |||
| US 3532304 A1, 06.10.1970 | |||
| US 5405103 A1, 11.04.1995. | |||

