Изобретение относится к рулевым приводам многоступенчатых ракет. Привод рулевой содержит рулевые машины, систему питания рулевых машин, кронштейны для закрепления рулевых машин к днищу ракеты. Сопло с помощью опор зафиксировано относительно корпуса ракеты. Сильфонный узел состоит из сильфона, ножа, мембраны. Техническим результатом изобретения является уменьшение габаритов, упрощение конструкции, уменьшение массы, повышение надежности рулевого привода, повышение жесткости в передаче системы рулевая машина - сопло двигателя, уменьшение времени разампулизации рулевых машин и исключение холостого хода во время начала работы рулевых машин.
Изобретение относится к ракетной технике и может быть использовано в рулевых приводах ракет с жидкостным ракетным двигателем для второй и верхних ступеней, у которых двигатель и привод размещены в баке с компонентом топлива предыдущей ступени.
Известна рулевая машина для управления жидкостным реактивным двигателем, размещенным в топливном баке предыдущей ступени ракеты, содержащая силовой механизм со штоком, мембрану, кольцевой нож и замок цангового типа со стопорным кольцом, причем кольцевой нож выполнен из двух раздельных частей - режущей, закрепленной в мембране, и поршневым насадком, внутри поршневой части установлен замок цангового типа со стопорным замком, стопорящим захват цанги, и съемник для съема стопорного кольца и освобождения захвата цанги, в поршневой части кольцевого ножа выполнены продольные пазы, в которых установлены радиальные тяги, скрепленные с захватами цанги, торцевой уступ и конический пояс, взаимодействующий соответственно со съемником и радиальными тягами (см. заявку №3129720, кл. F02K 9/02).
Известен привод рулевой второй ступени, содержащий ампулизированные рулевые машины, систему питания рулевых машин, кронштейны для закрепления рулевых машин к днищу ракеты, узлы развязки, установленные между камерой сгорания двигателя ракеты и рулевой машиной (см. патент Российской Федерации №2591005 с приоритетом 10.07.2016).
Недостатками прототипа являются:
1. Большой угол холостого отклонения качалки для обеспечения жесткой механической связи между штоком рулевой машины и двигательным блоком, что снижает точность установки нулевого положения рулевой машины.
2. Невозможность обеспечить проверки рулевой машины на работоспособность в составе двигательного блока, что уменьшает надежность системы рулевая машина - двигательный блок.
3. Необходимость в узле развязки, который разгружает шток РМ от осевых усилий при хранении, транспортировке и перегрузках ракеты.
Несмотря на указанные недостатки, вышеописанный привод рулевой по патенту РФ №2591005 принят в качестве прототипа.
Задачами, на решение которой направлено изобретение, являются достижение технического эффекта за счет устранения холостого хода при начальном движении штока рулевой машины, повышение точности угла отклонения сопла двигателя, обеспечение проверок рулевых машин на работоспособность в составе двигателя. Этот технический эффект достигается тем, что исключено промежуточное звено между штоком рулевой машины и соплом двигателя - узел развязки, шток выполнен плавающим, т.е. имеет возможность перемещаться вслед за отклонением сопла при наземной эксплуатации ракеты, после монтажа рулевой машины в состав ракеты, болты, стягивающие две части технологического хомута, который фиксирует шток в нулевом положении, ослабляются, что дает возможность провести испытания рулевой машины в составе двигателя, а затем технологический хомут снимается.
Сущность изобретения поясняется графическими материалами.
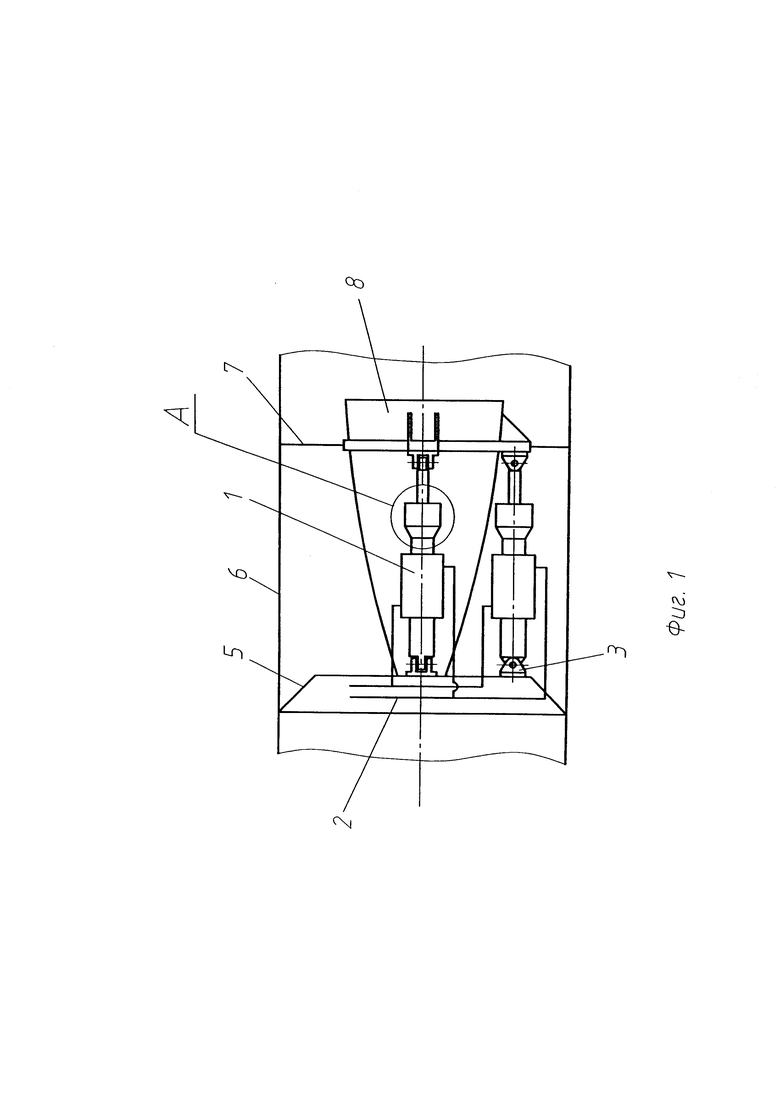
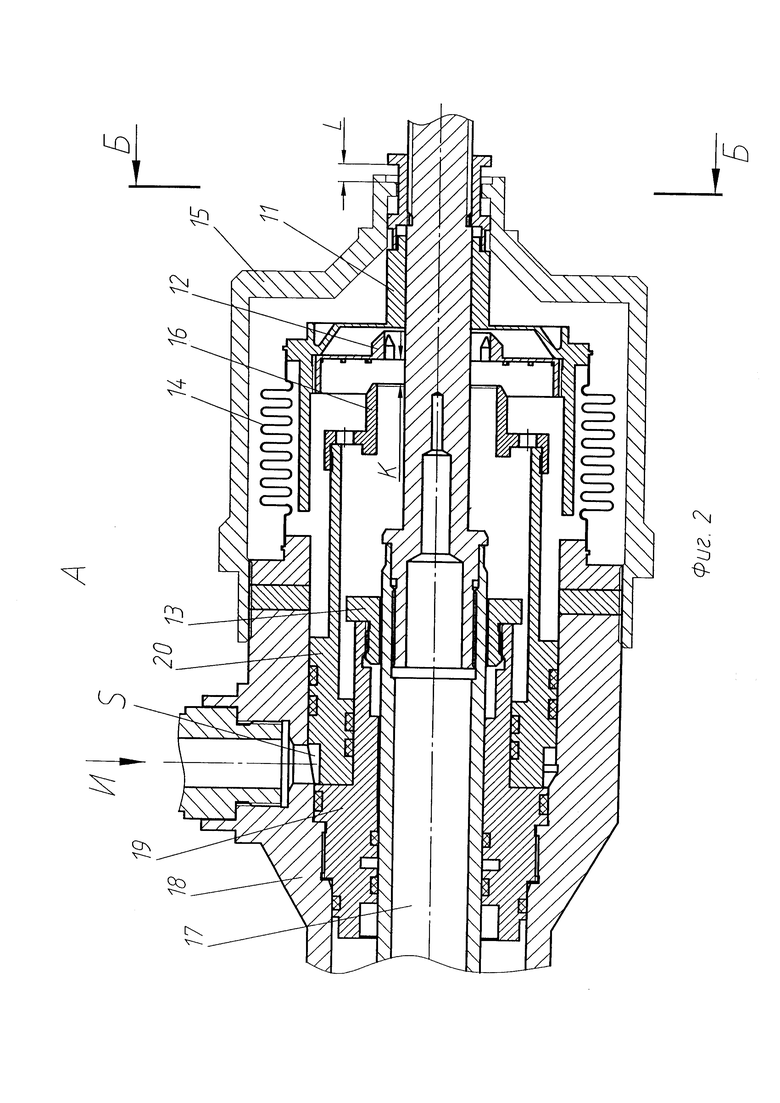
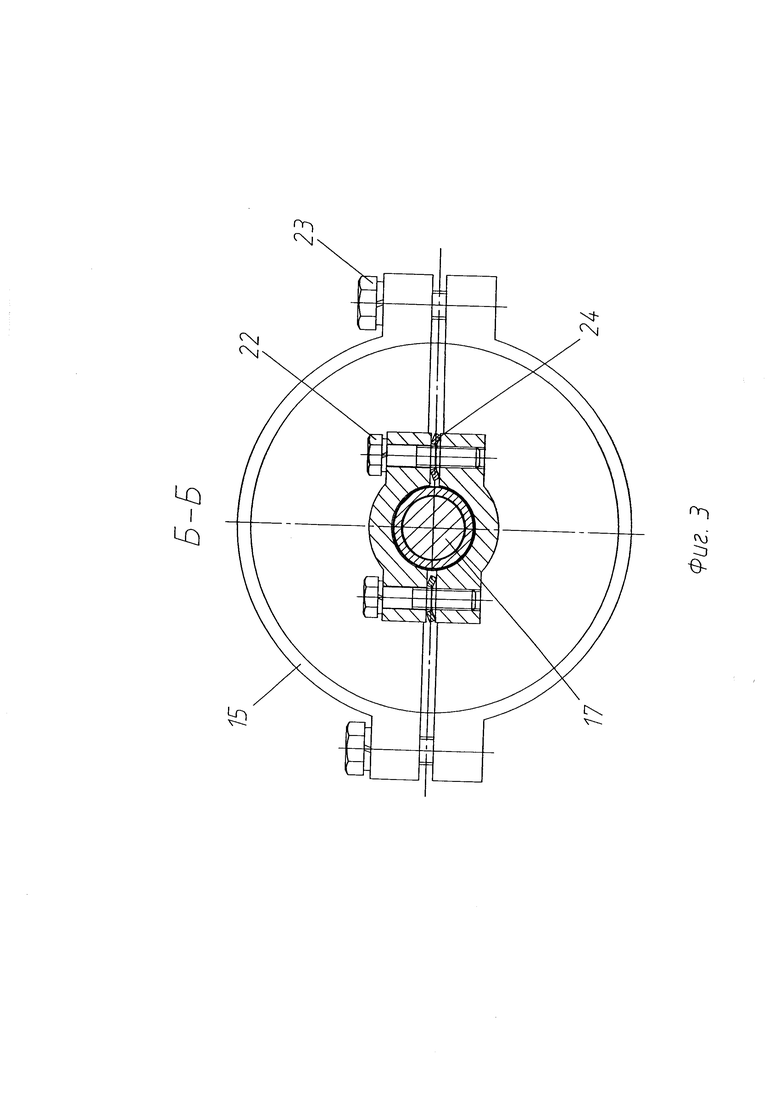
На фиг. 1 представлен привод рулевой в составе отсека ракеты. Привод рулевой состоит из рулевых машин 1, системы питания рулевых машин 2, кронштейнов 3, закрепленных на днище 5. На фиг. 2 показан узел ампулизации рулевой машины, который состоит из мембраны 11, кольцевого ножа 12, кольцевого насадка 16, сильфона 14, упора 13, поршня 20, крышки 19, корпуса 18, штока 17, технологического хомута 15. Мембрана 11 сварена со штоком 17 и сильфоном 14. Сильфон 14 приварен к корпусу 18. На фиг. 3 показан технологический хомут 15, который обеспечивает фиксацию штока при хранении, транспортировке и монтаже рулевых машин.
Предлагаемый привод рулевой работает следующим образом.
Во время хранения, транспортировки и монтажа привода рулевого на ракету две части технологического хомута 15 стянуты болтами 22, 23, что обеспечивает фиксацию штока 17 рулевой машины в нулевом положении. После монтажа рулевой машины 1 болты 22, 23 ослабляют и части технологического хомута 15 раздвигаются тарельчатыми пружинами 24, освобождая шток 17. Шток 17 получает возможность перемещаться в пределах зазора L. После чего осуществляется прокачка сопла 8 двигателя по программе испытаний. После завершения испытаний сопло 8 двигателя устанавливается в нулевое положение и технологический хомут 15 снимается. Нагрузки, возникающие при наземной эксплуатации ракеты, приводят к прогибам корпуса 6 ракеты. А поскольку сопло 8 двигателя закреплено к корпусу 6 ракеты опорами 7, то это вызывает угловые отклонения сопла 8. При этом плавающий шток 17 перемещается на величину L, не превышающую расстояние К от кольцевого насадка 16 до кольцевого ножа 12, и деформируется сильфон 14, предотвращающий попадание топлива во внутренние полости рулевой машины 1. При работе рулевого привода, когда происходит разделение ступеней и запускается двигатель, рабочая жидкость от турбонасосного агрегата двигателя под давлением поступает в систему питания 2 и по стрелке И в полость S. Под воздействием давления поршень 20 перемещается до упора 13, ударяет кольцевым насадком 16 в режущую часть кольцевого ножа 12, которая прорезает мембрану 11. При этом рвутся перемычки между лепестками кольцевого ножа 12 и образовавшиеся лепестки под воздействием кольцевого насадка 16 отгибаются наружу. После отбортовки в мембране 11 образуется отверстие, в которое свободно проходит часть мембраны 11, оставшаяся на штоке 17.
Техническим результатом предлагаемого изобретения является устранения холостого хода при начальном движении штока рулевой машины, повышение точности угла отклонения сопла двигателя, обеспечение проверок рулевых машин на работоспособность в составе двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД РУЛЕВОЙ | 2015 |
|
RU2591005C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2524483C1 |
| КОМПОНОВКА МНОГОСТУПЕНЧАТОЙ РАКЕТЫ-НОСИТЕЛЯ | 2009 |
|
RU2406660C1 |
| СПОСОБ КОМПЛЕКТАЦИИ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2708014C1 |
| УСТРОЙСТВО ДЛЯ ФИКСАЦИИ КАМЕРЫ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2013 |
|
RU2530364C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2020 |
|
RU2739660C1 |
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2725345C1 |
| Раздвижное сопло ракетного двигателя | 2018 |
|
RU2688869C1 |
| СПОСОБ ОТРАБОТКИ СТАРТА РАКЕТЫ | 2013 |
|
RU2536298C2 |
| КАМЕРА ЖРД С РЕГУЛИРУЕМЫМ СОПЛОМ | 2016 |
|
RU2640903C1 |
Изобретение относится к рулевым приводам многоступенчатых ракет. Привод рулевой содержит рулевые машины, систему питания рулевых машин, кронштейны для закрепления рулевых машин к днищу ракеты. Сопло с помощью опор зафиксировано относительно корпуса ракеты. Сильфонный узел состоит из сильфона, ножа, мембраны. Техническим результатом изобретения является уменьшение габаритов, упрощение конструкции, уменьшение массы, повышение надежности рулевого привода, повышение жесткости в передаче системы рулевая машина - сопло двигателя, уменьшение времени разампулизации рулевых машин и исключение холостого хода во время начала работы рулевых машин. 1 з.п. ф-лы, 3 ил.
1. Привод рулевой для управления вектором тяги жидкостного ракетного двигателя, содержащий систему питания рулевых машин, кронштейны для закрепления элементов рулевого привода, ампулизированные рулевые машины, отличающийся тем, что шток рулевой машины выполнен плавающим, а его перемещения компенсирует сильфон, разделяющий внутренние полости рулевой машины от внешней среды бака.
2. Привод рулевой по п. 1, отличающийся тем, что для фиксации штока в нулевом положении и проведения проверок рулевой машины совместно с соплом двигателя на рулевую машину установлен технологический хомут.
| ПРИВОД РУЛЕВОЙ | 2015 |
|
RU2591005C1 |
| Рулевой привод управляемых ракеты и снаряда | 2017 |
|
RU2661944C1 |
| БЛОК РУЛЕВОГО ПРИВОДА АРТИЛЛЕРИЙСКОГО СНАРЯДА | 2000 |
|
RU2175431C1 |
| БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2121650C1 |
| БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2121649C1 |

