Изобретение относится к ракетной технике, в которой создание жидкостных ракетных двигателей с минимально возможными массой, продольными и радиальными габаритами является всегда актуальным, особенно для жидкостных ракетных двигателей верхних ступеней ракет-носителей, а более конкретно, к устройству жидкостного ракетного двигателя с дожиганием с управляемым вектором тяги.
Известны жидкостные ракетные двигатели с дожиганием генераторного газа с управляемым вектором тяги, содержащие турбонасосный агрегат, газогенератор, камеру, раму с качанием всего двигателя в шарнирных узлах рамы и гибкие трубопроводы на магистралях подвода компонентов к насосам турбонасосного агрегата (см. справочник под редакцией Шустова И.Г. «Двигатели 1944-2000: авиационные, ракетные, морские, наземные», М., изд. «АКС-Конверсалт, 2000 г., стр. 96, РД-0120 и стр. 272, РД-191»).
Известный жидкостный ракетный двигатель с дожиганием с управляемым вектором тяги содержит газовод в виде изогнутого патрубка, соединяющего затурбинную полость генераторного газа турбонасосного агрегата с полостью смесительной головки камеры, гибкие трубопроводы на магистралях подвода компонентов с низким давлением, которые расположены в плоскостях стабилизации на каждой магистрали в количестве двух, что требует для минимизации гидравлических потерь компонентов при входе в насосы турбонасосного агрегата выполнения гибких трубопроводов с относительно большими диаметрами, что приводит к увеличению радиальных габаритов и массы входных магистралей. Увеличение гидравлических потерь давления компонентов между баками двигательной установки и входом в насосы требует дополнительного увеличения давления в баках и установки дополнительных подкачивающих насосов, что увеличивает массу двигательной установки, включающей топливные баки и жидкостный ракетный двигатель с дожиганием с управляемым вектором тяги.
Известны также жидкостные ракетные двигатели с дожиганием генераторного газа с управляемым вектора тяги за счет качания камеры в шарнирных узлах рамы, расположенных в верхней части двигателя над смесительной головкой камеры, содержащие турбонасосный агрегат, газогенератор, гибкий трубопровод подвода генераторного газа с избытком одного из компонентов к смесительной головке камеры, подвижным с камерой корпусом соединенным с корпусом смесительной головки, а неподвижным корпусом - с опорной нижней частью рамы, размещенным турбонасосным агрегатом с турбиной и затурбинной полостью, соединенной с полостью неподвижной части гибкого трубопровода в районе опорной части и расположенный выходной частью вдоль продольной оси камеры и гибкий трубопровод подвода недостающего в генераторном газе компонента, например, горючего, к камере (см. патент РФ по МПК F02K 9/42, 9/80 №2707015 от 04.03.2019, рис. 9) - прототип.
В приведенном жидкостном ракетном двигателе с дожиганием с управляемым вектором тяги размещение гибкого трубопровода подвода генераторного газа и размещение узла качания над смесительной головкой камеры позволяет отказаться от гибких трубопроводов на входных магистралях, что значительно снижает гидравлические потери на входных магистралях и массу магистралей, и двигателя в целом, хотя и требует увеличения продольных габаритов двигательного отсека из-за некоторой длины гибкого трубопровода подвода генераторного газа на смесительной головке. Опоры рамы для передачи силы тяги от камеры жидкостного ракетного двигателя с дожиганием генераторного газа с управляемым вектора тяги в свою очередь должны размещаться на некотором расстоянии в районе привалочной плоскости двигательного отсека на расстоянии от неподвижного корпуса гибкого трубопровода подвода генераторного газа, должны обеспечивать передачу силы тяги с минимальной массой и быть устойчивыми к боковой силе, возникающей при отклонении камеры для управления вектором тяги. Жидкостный ракетный двигатель с дожиганием с управляемым вектором тяги снабжен также рамой крепления турбонасосного агрегата, агрегатов автоматики и тепловой защиты. При слишком острых углах αo расположения стержней рамы относительно привалочной плоскости усилие на стержень определяется как сила тяги R, деленная на количество стержней n и sin αo. С одной стороны, стержни рамы должны быть расходящимися по мере приближения к привалочной плоскости и быть устойчивыми к боковой силе, возникающей при отклонении камеры для управления вектором тяги, а с другой стороны, они должны находиться своими продольными осями симметрии под не слишком острым углом к привалочной плоскости на максимальном от привалочной плоскости расстоянии, в противном случае приходится выполнять их со значительной толщиной стенок и дополнительно усиливать узлы стержней на концах, стыкуемых с опорной частью ракеты в районе привалочной плоскости, что приводит к увеличения массы. Для исключения этого приходится увеличивать продольные габариты двигательного отсека из-за вынужденного перемещения привалочной плоскости на увеличенное расстоянии от опор рамы в продольном направлении двигательного отсека. При острых углах αo расположения стержней рамы относительно привалочной плоскости усилие сжатия стержней рамы и напряжения изгиба в местах крепления стержней с опорной частью ракеты в районе привалочной плоскости получаются значительными и приходится в связи с этим увеличивать толщину и массу материала стержней, а также мест крепления стержней с опорной частью ракеты в районе привалочной плоскости. Кроме того, изгибные моменты в местах крепления стержней с опорной частью ракеты передаются на конструкцию опорной части ракеты, что в случае их увеличения требуют усиления опорной части ракеты и увеличения массы конструкции ракеты, а не только жидкостного ракетного двигателя с дожиганием с управляемым вектором тяги. Это приводит к необходимости увеличивать продольные габариты двигательного отсека для увеличения углов αo расположения стержней рамы относительно привалочной плоскости, что не всегда приемлемо, в том числе при форсировании по тяге жидкостного ракетного двигателя с дожиганием генераторного газа с управляемым вектором тяги с недопустимым увеличением продольных габаритов двигательного отсека, в котором необходимо разместить форсируемый по силе тяги двигатель.
Указанное техническое решение не позволяет уменьшить продольные габариты жидкостного ракетного двигателя с дожиганием генераторного газа с управляемым вектора тяги и снизить его массу.
Задачей предлагаемого изобретения является устранение вышеуказанных недостатков, уменьшение продольных габаритов жидкостного ракетного двигателя с дожиганием генераторного газа с управляемым вектора тяги и снижение массы.
Приведенные выше недостатки исключены в предполагаемом изобретении.
Указанная задача изобретения достигается тем, что в нем между опорной нижней частью рамы и неподвижным корпусом гибкого трубопровода со смещением в сторону сопла камеры вдоль продольной оси камеры и на удалении от продольной оси и от неподвижного корпуса гибкого трубопровода и на удалении в сторону продольной оси от опорной части ракеты в районе, привалочной плоскости параллельно привалочной плоскости установлен замкнутый шпангоут, соединенный с одной стороны стержнями в точках неподвижным корпусом гибкого трубопровода, а с другой стороны - стержнями с опорной частью ракеты в районе привалочной плоскости.
Задача изобретения достигается также тем, что замкнутый шпангоут расположен на равном радиальном удалении от точек стержней неподвижного корпуса гибкого трубопровода и от точек стержней в опорной части ракеты, а углы расположения стержней рамы относительно привалочной плоскости связаны зависимостью

где α0 - угол между привалочной плоскостью и прямой линией, соединяющей точку стержня неподвижного корпуса гибкого трубопровода с точкой стержня в опорной части ракеты;
α1 - угол между привалочной плоскостью и продольной осью симметрии стержня, соединяющего шпангоут с точкой неподвижного корпуса гибкого трубопровода;
α2 - угол между привалочной плоскостью и продольной осью симметрии стержня, соединяющего шпангоут с точкой стержня в опорной части ракеты;
А - поправочный коэффициент, связанный с массой замкнутого шпангоута.
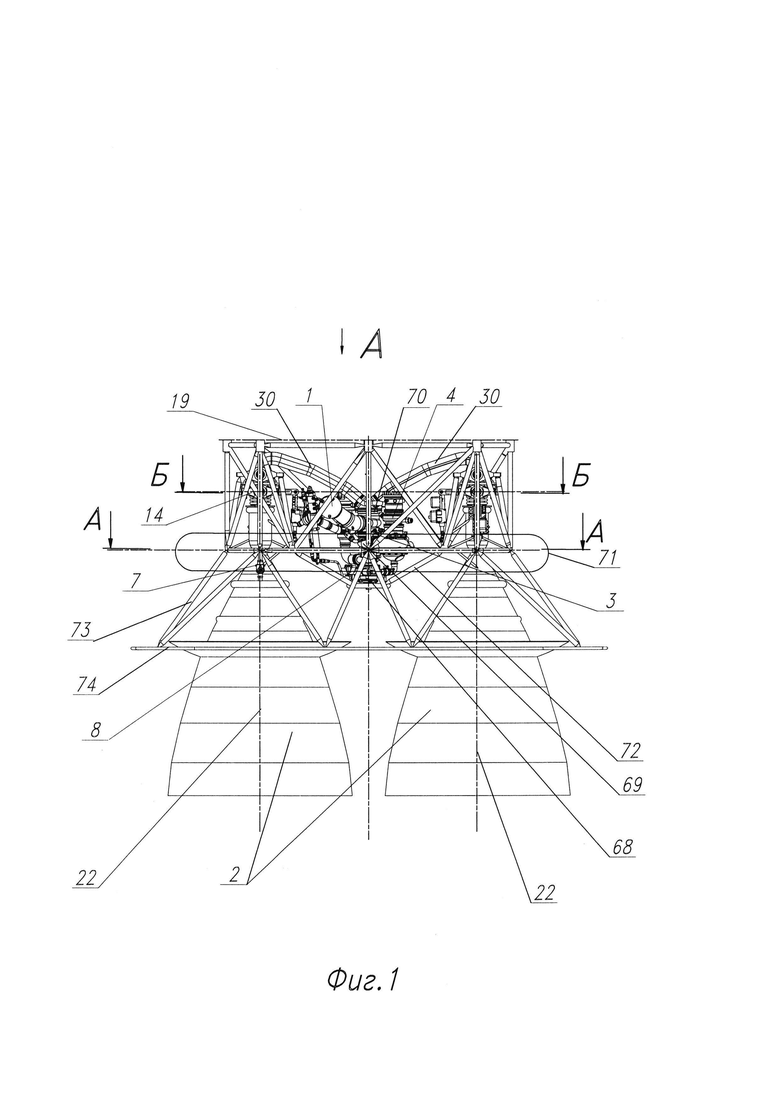
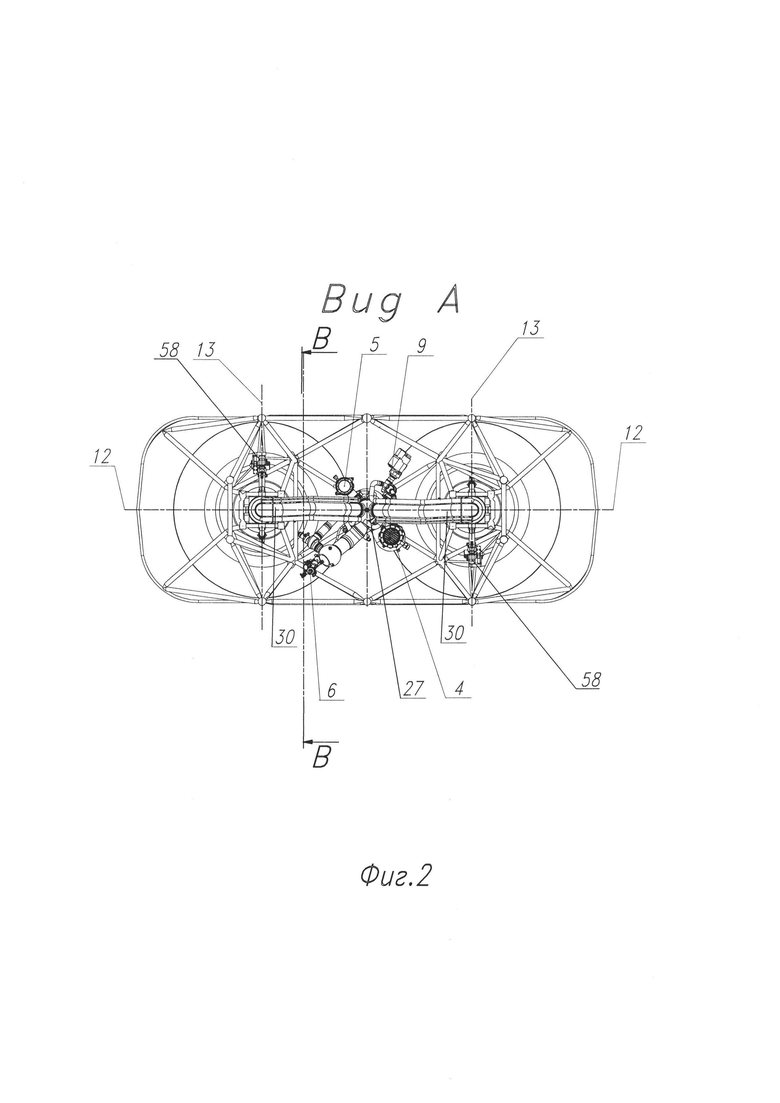
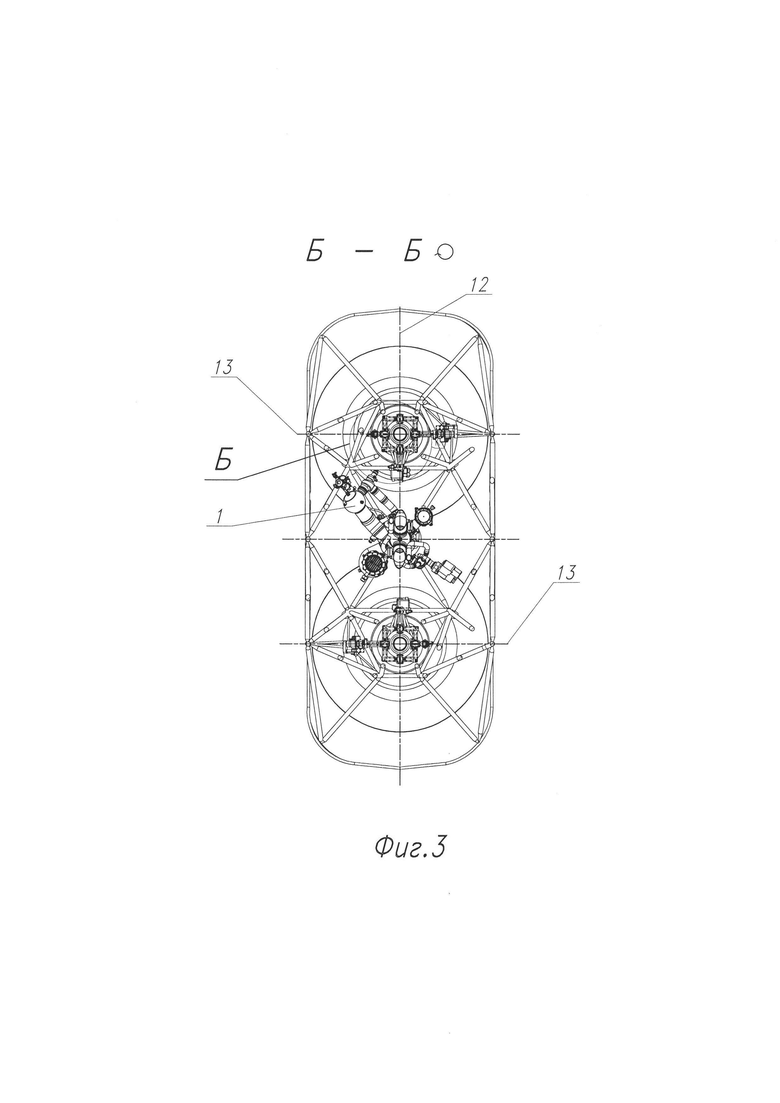
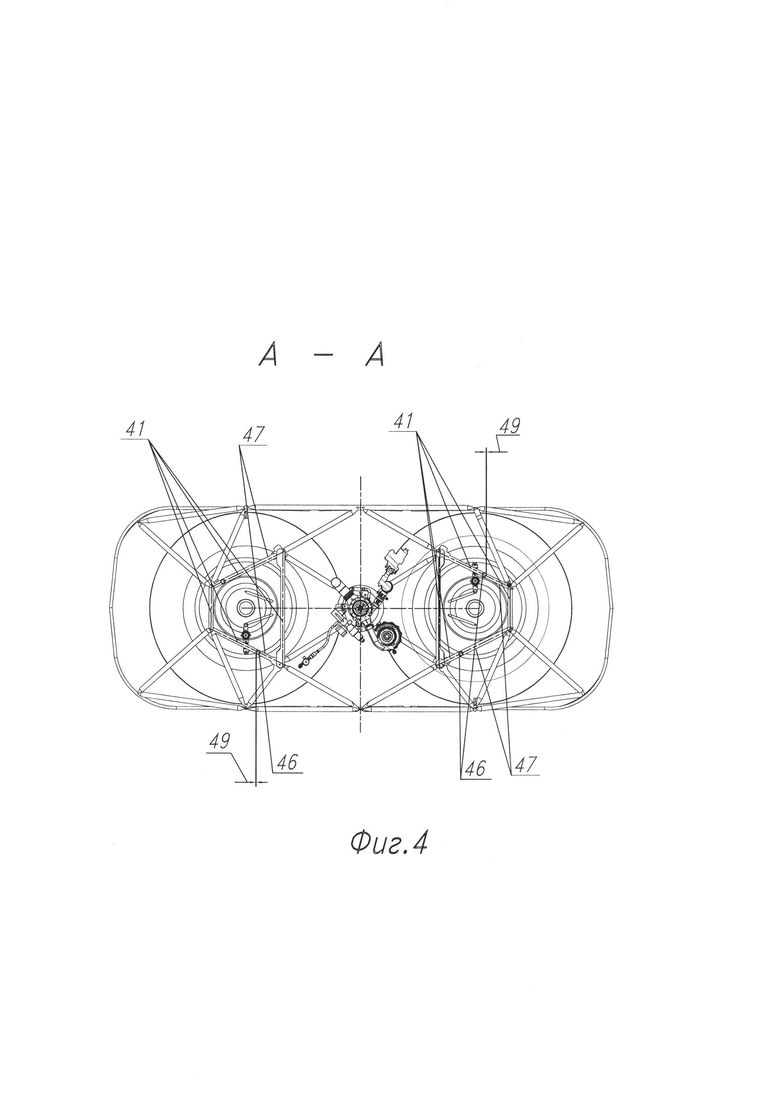
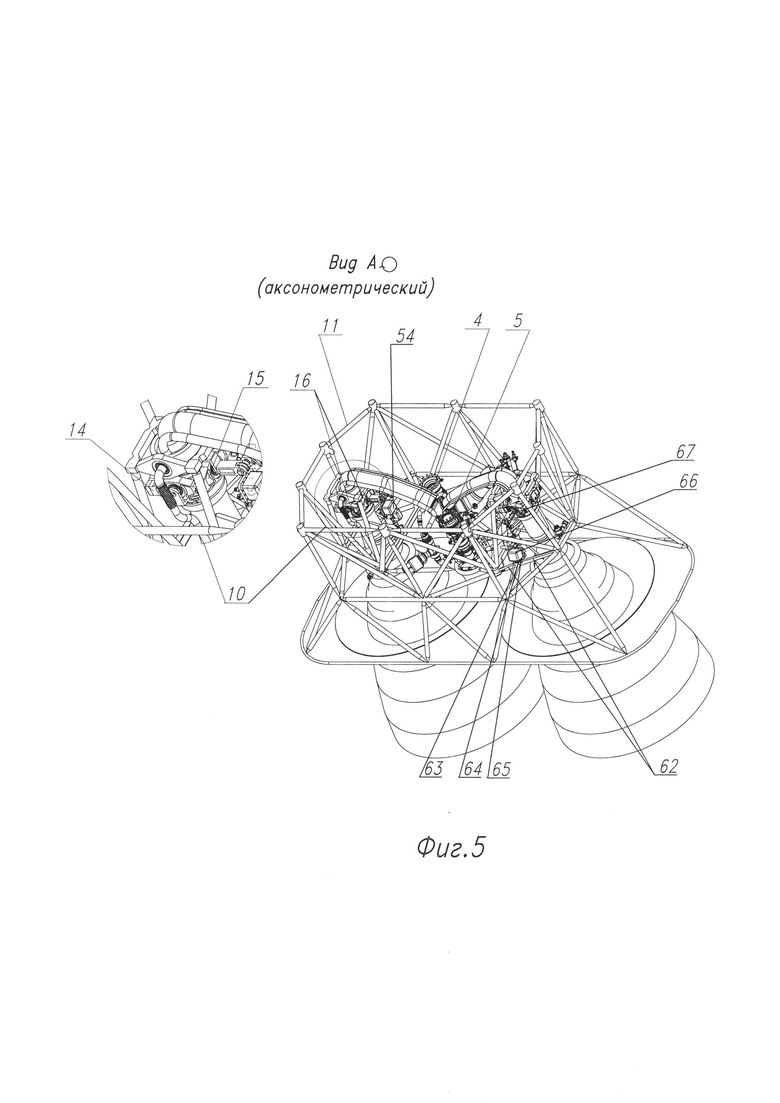
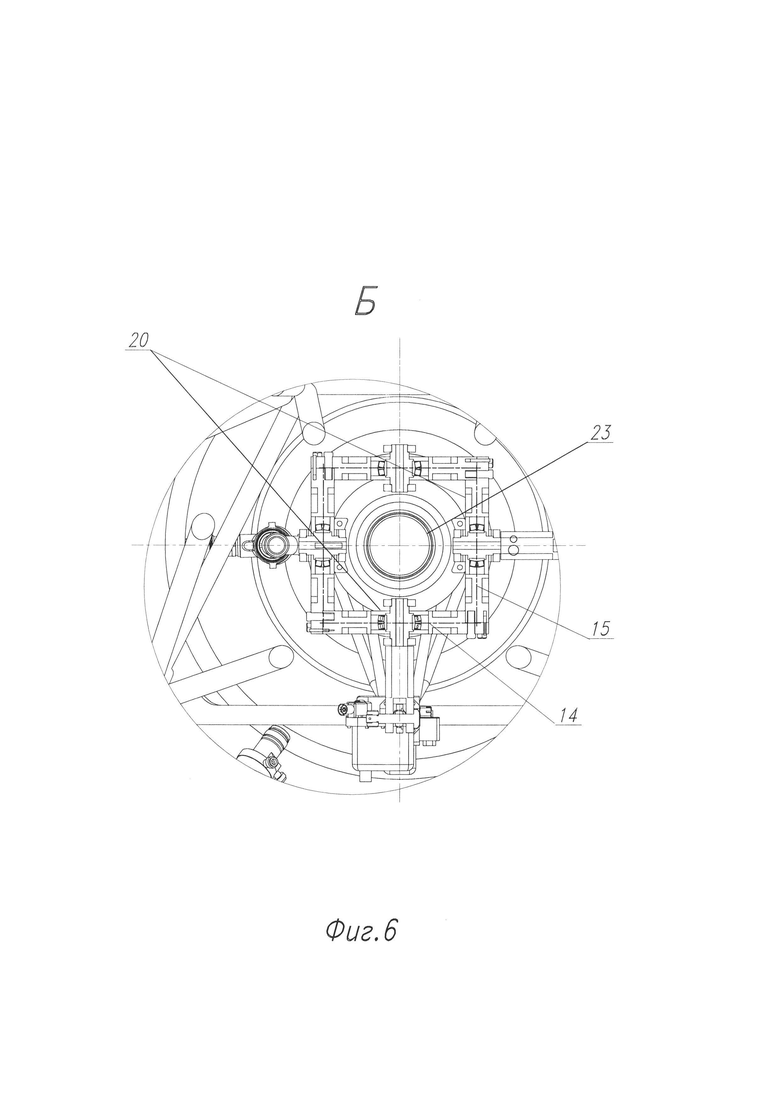
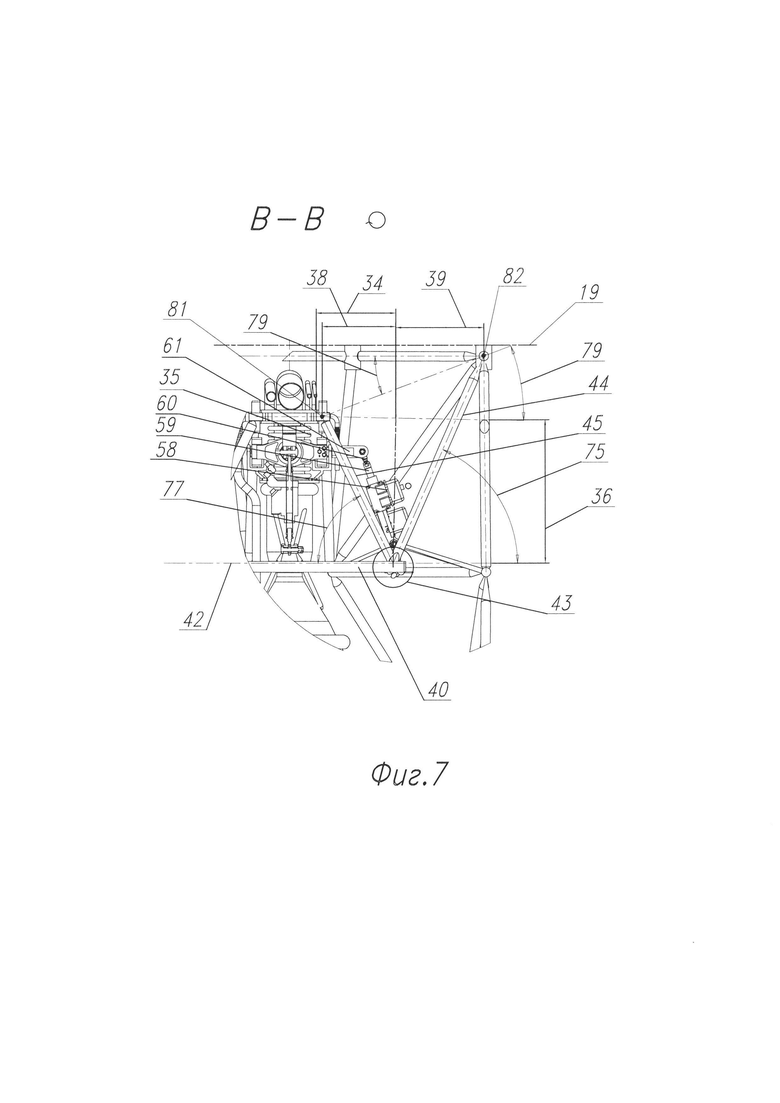
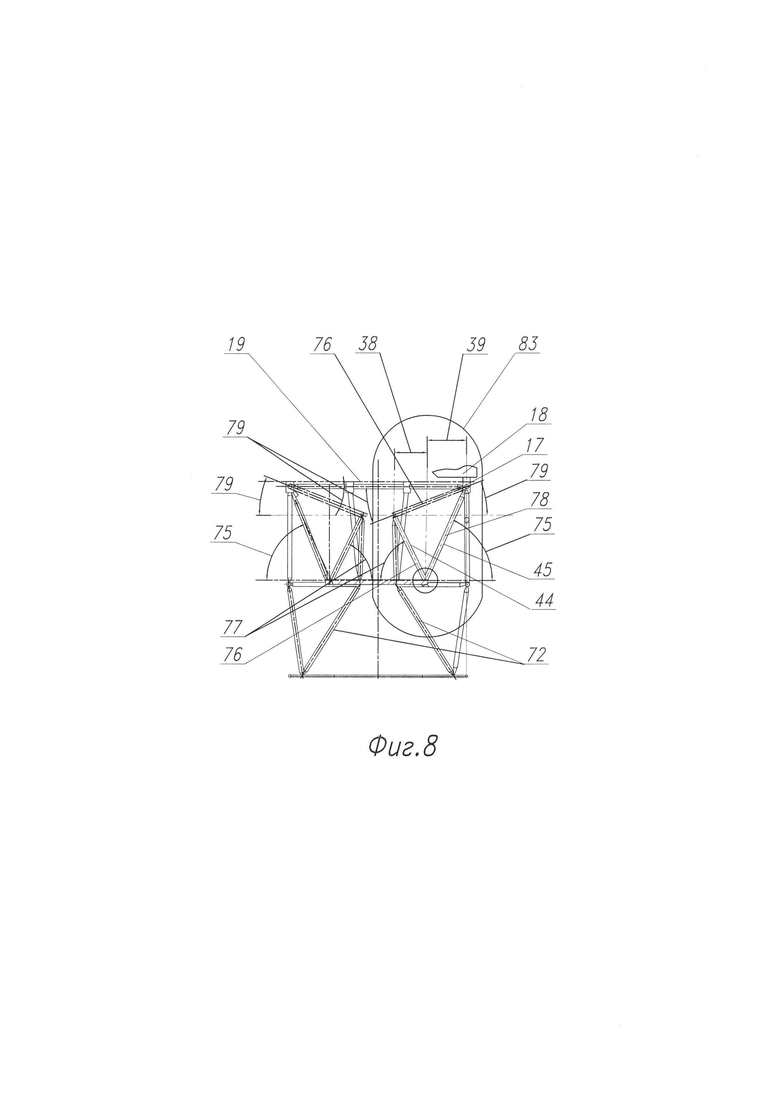
Предполагаемое изобретение представлено на чертеже фиг. 1-11 (на фиг. 1 - проекционный вид спереди на жидкостный ракетный двигатель с дожиганием с управляемым вектором тяги, на фиг. 2 - вид сверху на жидкостный ракетный двигатель с дожиганием с управляемым вектором тяги с разрезом В-В, на фиг. 3 - поперечный разрез жидкостного ракетного двигателя с дожиганием с управляемым вектором тяги по осям качания гибкого трубопровода, на фиг. 4 - поперечный разрез жидкостного ракетного двигателя с дожиганием с управляемым вектором тяги по плоскости размещения замкнутого шпангоута с видом на замкнутый шпангоут, на фиг. 5 - аксонометрическая проекция жидкостного ракетного двигателя с дожиганием с управляемым вектором тяги с местным видом на траверсы карданного узла, на фиг. 6 - местный вид поперечного сечения карданного узла и гибкого трубопровода, на фиг. 7 - сечение В-В с изображением узла гибкого трубопровода с узлом передачи силы тяги и углов продольных осей симметрии трубчатых стержней с привалочной плоскостью, на фиг. 8 - сечение В-В с изображением только рамы с узлом передачи силы тяги и углов продольных осей симметрии трубчатых стержней с привалочной плоскостью, на фиг. 9 - вид сбоку на камеру с изображением карданного узла и первой рулевой машинки и изображением разреза Г-Г, на фиг. 10 - разрез камеры по Г-Г, на фиг. 11 - увеличенный местный вид разреза Г-Г карданного узла в составе камеры, где показаны следующие агрегаты:
1. Газогенератор;
2. Камера;
3. Турбонасосный агрегат;
4. Пусковой клапан окислителя;
5. Пусковой клапан горючего;
6. Клапан горючего газогенератора;
7. Клапан горючего камеры;
8. Регулятор;
9. Дроссель;
10. Карданный узел;
11. Рама;
12. 13. Плоскость стабилизации;
14, 15. Траверса;
16. Кардан;
17. Опорная часть рамы;
18. Опорная часть ракеты;
19. Привалочная плоскость;
20. Внутренняя сторона кардана;
21. Сборная часть кардана;
22. Продольная ось симметрии камеры;
23. Гибкий трубопровод;
24. Неподвижный корпус гибкого трубопровода;
25. Сильфон;
26. Подвижный корпус гибкого трубопровода;
27. Затурбинная полость турбонасосного агрегата;
28. Полость генераторного газа смесительной головки;
29. Смесительная головка;
30. Жесткий трубопровод;
31. Фланец жесткого трубопровода;
32. Корпус смесительной головки;
33. Кольцевой дефлектор;
34. Радиальное расстояние;
35. Внешняя часть гибкого трубопровода;
36. Смещение замкнутого шпангоута;
37. Сопло камеры;
38. Радиальное расстояние;
39. Радиальное расстояние;
40. Замкнутый шпангоут;
41. Направляющая линия замкнутого шпангоута;
42. Плоскость направляющей линии замкнутого шпангоута;
43. Узел замкнутого шпангоута;
44. Трубчатый стержень;
45. Трубчатый стержень;
46. Поперечное сечение замкнутого шпангоута;
47. Перемычка замкнутого шпангоута;
48. Продольная ось симметрии перемычки;
49. Толщина материала стенки перемычки;
50. Корпус сопла камеры;
51. Кронштейн;
52. Первая часть первой рулевой машинки;
53. Шток;
54. Первая рулевая машинка;
55. Вторая часть первой рулевой машинки;
56. Корпус;
57. Первый кронштейн кардана;
58. Вторая рулевая машинка;
59. Первая часть второй рулевой машинки;
60. Шток;
61. Кронштейн;
62. 63. Трубчатый стержень;
64. Вторая часть второй рулевой машинки;
65. Корпус;
66. Вторая рулевая машинка;
67. Кронштейн;
68. Насос горючего.
69. Насос окислителя;
70. Турбина;
71. Нижняя часть рамы;
72. 73. Трубчатый стержень;
74. Донная защита;
75. Угол;
76. Продольная ось симметрии;
77. Угол;
78. Продольная ось симметрии;
79. Угол;
80. Прямая линия;
81. Точка трубчатого стержня;
82. Точка опорной части рамы;
83. Силовая часть рамы.
Жидкостный ракетный двигатель с дожиганием с управлением вектором тяги содержит газогенератор 1, камеру 2, турбонасосный агрегат 3, агрегаты автоматики: пусковой клапан окислителя 4, пусковой клапан горючего 5, клапан горючего газогенератора 6, клапан горючего камеры 7, и регулирования: регулятор 8, дроссель 9. Камера 2 установлена с помощью карданного узла 10 в раме 11 с возможностью качания в плоскостях стабилизации 12 и 13 в траверсах 14 и 15, связанных с карданом 16. Рама 11 соединена опорной частью 17 с опорной частью ракеты 18 в районе привалочной плоскости 19. С внутренней стороны 20 сборной части 21 кардана 16 вдоль продольной оси симметрии 22 камеры 2 установлен гибкий трубопровод 23, состоящий из неподвижного корпуса 24, сильфона 25 и подвижного корпуса 26, последовательно смонтированных в один узел. Затурбинная полость 27 турбонасосного агрегата 3 соединена с полостью генераторного газа 28 смесительной головки 29 камеры 2 с помощью последовательно соединенных жесткого трубопровода 30 и гибкого трубопровода 23. Гибкий трубопровод 23 соединен посредством неподвижного корпуса 24 с фланцем 31 жесткого трубопровода 30, а подвижным корпусом 26 - непосредственно с корпусом 32 смесительной головки 29. Внутри сильфона установлен кольцевой дефлектор 33 из двух подвижных частей, одна из которых закреплена за неподвижный корпус 24, а вторая - за подвижный корпус 26. Между камерой 2 на радиальном расстоянии 34 от внешней части 35 гибкого трубопровода 23 со смещением 36 в сторону сопла 37 камеры 2 вдоль продольной оси симметрии 22 камеры 2, на радиальном расстоянии 38 от неподвижного корпуса 24 гибкого трубопровода 23, и на радиальном расстоянии 39 от опорной части 17 рамы 11 и от опорной части ракеты 18 установлен замкнутый шпангоут 40, направляющая которого 41 расположена в плоскости 42, параллельной привалочной плоскости 19. Замкнутый шпангоут 40, например четырьмя, узлами 43, соединен с помощью, например четырех, трубчатых стержней 44 с неподвижным корпусом 24 гибкого трубопровода 23, и теми же, например четырьмя, узлами 43 замкнутого шпангоута 40 соединен с помощью, например, четырех, трубчатых стержней 45 с опорной частью 17 рамы 11 и далее с опорной частью ракеты 18. Замкнутый шпангоут 40 сформирован тонкостенными спрофилированными в поперечных сечениях 46 спрофилированными в поперечных сечениях 46 перемычками 47, продольные оси симметрии 48 которых являются направляющей линией 41, которые соединяют узлы 43 в замкнутую конструкцию, причем перемычки 47, предназначенные только для восприятия боковых усилий от силы тяги камеры 2, выполнены с коробчатыми или трубчатыми тонкостенными поперечными сечениями 46 не требующими больших толщин материала стенок 49. Корпус 50 сопла 37 камеры 2 соединен кронштейном 51 с первой частью 52 (штоком 53) первой рулевой машинки 54, которая второй частью 55 (корпусом 56) соединена с первым кронштейном 57 кардана 21. Вторая рулевая машинка 58 соединена первой частью 59 (штоком 60) с кронштейном 61, закрепленным за два соседних узла 43 замкнутого шпангоута 40 трубчатыми стержнями 62 и за раму 11 и далее за опорную часть ракеты 18 трубчатыми стержнями 63. Второй частью 64 (корпусом 65) вторая рулевая машинка 66 соединена с кронштейном 67 кардана 21, расположенного перпендикулярно первому кронштейну 57 кардана 21. Турбонасосный агрегат 3 с насосом горючего 68, насосом окислителя 69 и турбиной 70 закреплен за нижнюю часть 71 рамы 11 с помощью трубчатых стержней 72. За нижнюю часть 71 рамы 11 с помощью трубчатых стержней 73 закреплена донная защита 74. При равенстве радиальных расстояний 34 с радиальными расстояниями 38, значениями углов 75 (α1) расположения продольных осей симметрии 76 трубчатых стержней 44 с привалочной плоскостью 19, значениями углов 77 (α2) расположения продольных осей симметрии 78 трубчатых стержней 45 с привалочной плоскостью 19 и значениями углов 79 (α0) расположения прямой линии 80 соединения точек 81 трубчатых стержней 44 на неподвижном корпусе 24 гибкого трубопровода 23 с точками 82 на опорной части 17 рамы 11, значения углов 75 (α1) и углов 77 (α2) выбраны из соотношения

где α0 - угол между привалочной плоскостью 19 и прямой линией, соединяющей точку 81 трубчатого стержня 44 неподвижного корпуса 24 гибкого трубопровода 23 с точкой 82 трубчатого стержня 44 в опорной части 17 рамы 11 (в опорной части ракеты 18);
α1 - угол между привалочной плоскостью 19 и продольной осью симметрии 76 трубчатого стержня 44, соединяющего замкнутый шпангоут 40 с точкой 81 неподвижного корпуса 24 гибкого трубопровода 23;
α2 - угол между привалочной плоскостью 19 и продольной осью симметрии 78 трубчатого стержня 45, соединяющего замкнутый шпангоут 40 с точкой 82 трубчатого стержня 45 в опорной части 17 рамы 11 (опорной части ракеты 18);
А - поправочный коэффициент, связанный с массой замкнутого шпангоута.
Поправочный коэффициент А определяет ограничение массы замкнутого шпангоута 40 из неравенства значений масс трубчатых стержней 44 и 45 и замкнутого шпангоута с использованием замкнутого шпангоута 40, входящих в силовую часть 83 рамы 11, и трубчатых стержней силовой части 83 рамы 11, продольные оси симметрии которых являются прямыми линиями 80 без замкнутого шпангоута 40, причем количество трубчатых стержней 44, 45 и прототипа (по углом (α0)) принято одинаковым, равным (т).
Масса трубчатого стержня рамы при расположении продольной оси симметрии продольного стержня под углом 79 (α0) определяется зависимостью:
М0={[(R/n)/sinα0]/π.d.[σ]}.ρ,
где R - сила тяги камеры;
т - количество трубчатых стержней;
d - диаметр трубчатого стержня;
ρ - плотность материала трубчатого стержня;
[σ] - предельно допустимое напряжение материала трубчатого стержня.
При малом значении угла 79 (α0) масса трубчатого стержня увеличивается до значений, которые не всегда приемлемы при разработке жидкостного ракетного двигателя с дожиганием с управляемым вектором тяги.
Масса трубчатого стержня 44 рамы 11 при расположении продольной оси симметрии 76 трубчатого стержня 44 под углом 75 (α1) определяется зависимостью:
M1={[(R/n)/sinα1]/π.d.[σ]}.ρ,
где R - сила тяги камеры;
n - количество трубчатых стержней 44;
d - диаметр трубчатого стержня 44;
ρ - плотность материала трубчатого стержня 44;
[σ] - предельно допустимое напряжение материала трубчатого стержня 44.
Масса трубчатого стержня 45 рамы 11 при расположении продольной оси симметрии 78 трубчатого стержня 45 под углом 77 (α2) определяется зависимостью:
M2={[(R/n)/sinα2]/π.d.[σ]}.ρ,
где R - сила тяги камеры;
n - количество трубчатых стержней 45;
d - диаметр трубчатого стержня 45;
ρ - плотность материала трубчатого стержня 45;
[σ] - предельно допустимое напряжение материала трубчатого стержня 45.
Ограничение по массе Мш замкнутого шпангоута 40 определяется из соотношения
Мш ≤ М0-[М1+М2];
Мш ≤ {[(R/n)/sinα0]/π.d.[σ]}.ρ-{[(R/n)/sinα1]/π.d.[σ]}.ρ-{[(R/n)/sinα2]/π.d.[σ]}.ρ,
из которого определяется значение поправочного коэффициента А.
Жидкостный ракетный двигатель с дожиганием с управляемым вектором тяги работает следующим образом. Окислитель поступает от пускового клапана окислителя в насос окислителя 69 турбонасосного агрегата 3, а далее в газогенератор 1. Горючее поступает от пускового клапана горючего 5 в насос горючего 68 турбонасосного агрегата 3, а далее через капан горючего газогенератора 6 и регулятор 8 в газогенератор 1. Другая часть горючего поступает от насоса горючего 68 через дроссель 9 и клапан горючего камеры 7 в камеру 2. Продукты сгорания из газогенератора 1 поступают на турбину 70 турбонасосного агрегата 3, а далее в затурбинную полость 27, жесткий трубопровод 30 и гибкий трубопровод 23, далее через подвижный корпус 26 - непосредственно в сильфон 25, подвижный корпус 26 и полость генераторного газа 28 в корпусе 32 смесительной головки 33 камеры 2. Сила тяги камеры 2 передается от подвижного корпуса 26 гибкого трубопровода 23 через траверсы 14 и 15 на неподвижный корпус 24 с фланцем 31. Далее сила тяги камеры 2 передается с помощью трубчатых стержней 44 на узлы 43 замкнутого шпангоута 40, а далее от узлов 43 замкнутого шпангоута 40 с помощью трубчатых стержней 45 на опорную часть 17 рамы 11 и далее на опорную часть ракеты 18 в районе привалочной плоскости 19. Управление вектором тяги осуществляется отклонением камеры 2 в траверсах 14 и 15 с помощью первой рулевой машинки 54 в в плоскости стабилизации 12 и второй рулевой машинки 58 в плоскости стабилизации 13. Причем, перемещение камеры 2 при качании происходит внутри замкнутого шпангоута 40, и внутри проема донной защиты 74. За счет расположения трубчатых стержней 44 и 45 под большими углами (α1) и (α2) соответственно, чем угол (α0) по отношению к привалочной плоскости 19, масса силовой части 83 рамы 11 получается меньше (даже без учета снижения массы опорных узлов 17 рамы 11) при одновременном сокращении продольных габаритов жидкостного ракетного двигателя с дожиганием с управляемым вектором тяги.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2016 |
|
RU2626618C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2024 |
|
RU2836284C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2524483C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ | 2022 |
|
RU2784462C1 |
| ЖИДКОСТНАЯ РАКЕТНАЯ ДВИГАТЕЛЬНАЯ УСТАНОВКА | 2014 |
|
RU2563596C1 |
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2707015C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ ГЕНЕРАТОРНОГО ГАЗА | 2012 |
|
RU2490508C1 |
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2703076C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2158838C2 |
| СПОСОБ КОМПЛЕКТАЦИИ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2708014C1 |
Изобретение относится к ракетной технике, в которой создание жидкостных ракетных двигателей с минимально возможными массой, продольными и радиальными габаритами является всегда актуальным, особенно для жидкостных ракетных двигателей верхних ступеней ракет-носителей, а более конкретно, к устройству жидкостного ракетного двигателя с дожиганием с управляемым вектором тяги. Указанная задача изобретения достигается тем, что в нем между опорной нижней частью рамы и неподвижным корпусом гибкого трубопровода со смещением в сторону сопла камеры вдоль продольной оси камеры и на удалении от продольной оси и от неподвижного корпуса гибкого трубопровода и на удалении в сторону продольной оси от опорных точек рамы привалочной плоскости параллельно привалочной плоскости установлен замкнутый шпангоут, соединенный с одной стороны стержнями в точках с вторым неподвижным корпусом гибкого трубопровода, а с другой стороны - стержнями с опорной частью ракеты в районе привалочной плоскости. Изобретение обеспечивает уменьшение продольных габаритов жидкостного ракетного двигателя с дожиганием генераторного газа с управляемым вектора тяги и снизить его массу. 1 з.п. ф-лы, 11 ил.
1. Жидкостный ракетный двигатель с дожиганием с управлением вектором тяги, содержащий газогенератор, агрегаты автоматики и регулирования, стержневую раму, соединенную верхней частью с опорной частью ракеты в районе привалочной плоскости с возможностью качания в плоскостях стабилизации, камеру с гибким трубопроводом, подвижным корпусом, соединенным с корпусом смесительной головки камеры, а неподвижным корпусом - с опорной нижней частью рамы, с размещенным турбонасосным агрегатом с турбиной и затурбинной полостью, соединенной с полостью неподвижного корпуса гибкого трубопровода, отличающийся тем, что в нем между опорной нижней частью рамы и неподвижным корпусом гибкого трубопровода со смещением в сторону сопла камеры вдоль продольной оси камеры и на равном удалении от неподвижного корпуса гибкого трубопровода и от опорной части ракеты в районе привалочной плоскости параллельно привалочной плоскости установлен замкнутый шпангоут, соединенный с одной стороны трубчатыми стержнями в точках с неподвижным корпусом гибкого трубопровода, а с другой стороны - трубчатыми стержнями с опорной частью ракеты в районе привалочной плоскости.
2. Жидкостный ракетный двигатель с дожиганием с управлением вектором тяги по п. 1, отличающийся тем, что замкнутый шпангоут расположен на равном радиальном удалении от точек стержней неподвижного корпуса гибкого трубопровода и от точек стержней в опорной части ракеты, а углы расположения стержней рамы относительно привалочной плоскости связаны зависимостью

где α0 - угол между привалочной плоскостью и прямой линией, соединяющей точку трубчатого стержня неподвижного корпуса гибкого трубопровода с точкой стержня в опорной части ракеты;
α1 - угол между привалочной плоскостью и продольной осью симметрии трубчатого стержня, соединяющего шпангоут с точкой неподвижного корпуса гибкого трубопровода;
α2 - угол между привалочной плоскостью и продольной осью симметрии трубчатого стержня, соединяющего шпангоут с точкой стержня в опорной части ракеты;
А - поправочный коэффициент, связанный с массой замкнутого шпангоута.
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2707015C1 |
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2709243C1 |
| Способ лечения травм спинного мозга | 1982 |
|
SU1326277A1 |
| FR 2073451 A7, 01.10.1977. | |||

