Область техники, к которой относится изобретение
Изобретение относится к аудиосистеме и к способу ее работы и, в частности, но не исключительно, к аудиосистеме, способной оценивать положения пользователя.
Уровень техники
Определение информации, относящейся к присутствию и положению, представляет интерес во многих применениях аудио, включающих в себя, например, связь через гарнитуру и системы интеллектуальных развлечений. Знания местоположений пользователей и их движение могут применяться для определения местоположения аудиовизуальных эффектов в местоположениях пользователя для более персонализированных впечатлений в системах развлечений. Также, такие знания могут применяться для улучшения рабочих характеристик (речевой) связи через гарнитуру, например, посредством ослабления звука с других направлений, кроме оцененного направления требуемого пользователя.
В частности, такие применения могут использовать направленное воспроизведение или захват аудио для обеспечения улучшенных эффектов. Такая направленность, например, может извлекаться из аудиоматриц, содержащих множество аудиоприводов или сенсоров. Таким образом, формирование акустического луча является относительно общим во многих применениях, таких как, например, в системах телеконференций. В таких системах применяются весовые коэффициенты к сигналам отдельных аудиоэлементов, таким образом, приводя к генерированию диаграммы направленности луча для матрицы. Матрица может адаптироваться к положениям пользователя в соответствии с различными алгоритмами. Например, весовые коэффициенты могут непрерывно обновляться, приводя к максимальному уровню сигнала или отношению сигнал-шум в соответствии с различными алгоритмами. Однако такие обычные подходы требуют присутствия аудиоисточников, и, следовательно, весовые коэффициенты акустической матрицы могут адаптироваться только после того, как источник станет активным.
Это является неблагоприятным во многих сценариях. Например, отслеживание пользователя имеет тенденцию становиться неточным, когда имеются только короткие вспышки акустической активности. Такой сценарий является типовым для многих применений, включающих в себя, например, речевые применения, где динамик обычно воспроизводит звуки только в интервалах. Кроме того, формирование луча может применяться эффективно только после некоторой продолжительности акустической активности, так как адаптация весовых коэффициентов занимает некоторое время, чтобы стать точной в достаточной степени. Также, могут происходить ложные обнаружения при присутствии других акустических источников. Например, если радиоприемник или компьютер воспроизводит звуки в комнате, система может адаптироваться к этому источнику звука, а не к предполагаемому источнику звука, или адаптация может компрометироваться источником шума.
Чтобы решить такие проблемы, было предложено использовать видеокамеры для выполнения определения положения и использовать видеосигнал для управления адаптацией весовых коэффициентов. Однако такие подходы имеют тенденцию быть сложными, дорогими и требующими ресурсы с точки зрения использования вычислительных и энергетических ресурсов.
Следовательно, улучшенная аудиосистема была бы полезной и, в частности, была бы полезной система, позволяющая получить повышенную гибкость, уменьшенное использование ресурсов, уменьшенную сложность, улучшенную адаптацию, повышенную надежность, повышенную точность и/или улучшенные рабочие характеристики.
Раскрытие изобретения
Следовательно, изобретение стремится, предпочтительно, ослабить, смягчить или устранить один или несколько из вышеупомянутых недостатков отдельно или в любом сочетании.
Согласно аспекту изобретения обеспечивается аудиосистема по п.1 формулы изобретения.
Изобретение может обеспечивать улучшенную адаптацию направленности матрицы аудиодиапазона. Подход, например, может предоставлять возможность выполнять адаптацию характеристик фильтра для обработки матрицы, основываясь на ультразвуковых сигналах. Адаптация характеристик и весовых коэффициентов фильтра и, таким образом, направленности аудиоматрицы может выполняться в отсутствие звука, создаваемого от целевого источника. Конкретно, характеристики/весовые коэффициенты фильтра могут устанавливаться для обеспечения луча или провала в требуемом направлении, основываясь на ультразвуковых сигналах.
Изобретение во многих вариантах осуществления может обеспечивать повышенную точность и/или более быструю адаптацию направленности аудио для матрицы аудиодиапазона. Инициализация весовых коэффициентов для матрицы аудиодиапазона, например, может основываться на характеристике присутствия.
В некоторых вариантах осуществления диаграмма пространственной направленности матрицы аудиодиапазона может регулироваться в ответ на характеристику присутствия. Например, если обнаружено присутствие пользователя, может генерироваться направленный луч, и если не обнаруживается пользователь, может генерироваться всенаправленный луч.
Считается, что аудиодиапазон может соответствовать акустическому диапазону. Аудиодиапазоном может быть диапазон, имеющий верхнюю частоту ниже 15 кГц и обычно ниже 10 кГц. Диапазоном ультразвуковых частот может быть диапазон, имеющий нижнюю частоту выше 10 кГц и часто преимущественно выше 15 кГц или 20 кГц.
Весовые коэффициенты могут представлять собой весовые коэффициенты фильтра отдельных фильтров, применяемых к отдельным сигналам аудидиапазона процессором матрицы. Весовыми коэффициентами могут быть комплексные значения и/или эквивалентно могут быть задержки, масштабные коэффициенты и/или фазовые сдвиги.
Согласно дополнительному признаку изобретения, характеристика присутствия содержит оценку положения, и схема аудиоматрицы выполнена с возможностью определения весовых коэффициентов в ответ на характеристику положения.
Это может обеспечивать улучшенные рабочие характеристики и/или дополнительные возможности для многих применений. Изобретение, например, может предоставить возможность формирования луча для отслеживания пользователей или аудиоисточников даже тогда, когда они не создают никакого звука. Во многих вариантах осуществления оно может обеспечивать более быструю адаптацию диаграммы направленности луча для конкретного положения пользователя.
Согласно дополнительному признаку изобретения элементы аудиодиапазона представляют собой аудиосенсоры, и схема аудиоматрицы выполнена с возможностью генерирования направленного выходного сигнала посредством объединения сигналов аудиодиапазона от аудиосенсоров, причем объединение содержит применение весовых коэффициентов к отдельным сигналам аудиодиапазона.
Изобретение может предоставлять возможность выполнения полезного управления направленностью для системы захвата аудио, основанной на матрице сенсоров аудиодиапазона. Подход может предоставлять возможность лучу захвата аудиодиапазона адаптироваться даже тогда, когда звук не создается целевым источником. Кроме того, подход может уменьшить или смягчить воздействие аудио, создаваемого нежелательными источниками звука.
Согласно дополнительному признаку изобретения аудиосистема содержит множество широкополосных сенсоров, каждый из которых представляет собой как ультразвуковой сенсор матрицы ультразвуковых сенсоров, так и аудиосенсор матрицы аудиодиапазона.
Этот же широкополосный сенсор, таким образом, может использоваться в качестве как элемента аудиодиапазона, так и ультразвукового сенсора. Это может обеспечивать экономически очень эффективную реализацию по многим сценариям. Подход может упрощать и/или улучшать взаимодействие между обработкой аудиодиапазона и обработкой диапазона ультразвуковых частот. Например, подход во многих сценариях может предоставлять возможность повторного использования параметров, определенных в ответ на ультразвуковые сигналы при обработке сигналов аудиодиапазона. Конкретно, подход может упрощать и/или улучшать синхронизацию между операциями и обработкой диапазонов ультразвуковых и аудиочастот.
Согласно дополнительному признаку изобретения множество широкополосных сенсоров образует как матрицу ультразвуковых сенсоров, так и матрицу аудиодиапазона.
Каждый из элементов аудиодиапазона и ультразвуковых сенсоров может быть реализован посредством широкополосного сенсора. Одна и та же матрица широкополосных сенсоров, таким образом, может использоваться в качестве матрицы аудиодиапазона и матрицы ультразвуковых сенсоров. Ультразвуковые сигналы и сигналы аудиодиапазона могут отличаться частотными интервалами одних и тех же физических сигналов, а именно элементов широкополосных сенсоров.
Подход может обеспечивать экономически очень эффективную реализацию по многим сценариям. Подход может упрощать и/или улучшать взаимодействие между обработкой аудиодиапазона и обработкой диапазона ультразвуковых частот.
Согласно дополнительному признаку изобретения аудиосистема дополнительно содержит: модель движения пользователя, выполненная с возможностью отслеживания положения пользователя; схему обновления для обновления модели движения пользователя в ответ как на ультразвуковые сигналы, так и на сигналы аудиодиапазона.
Это может обеспечивать улучшенные рабочие характеристики во многих вариантах осуществления и может во многих сценариях обеспечивать существенно улучшенное отслеживание движения пользователя.
Согласно дополнительному признаку изобретения схема обновления выполнена с возможностью обновления модели движения пользователя в ответ на ультразвуковые сигналы, когда характеристика сигналов аудиодиапазона удовлетворяет критерию.
Это может улучшать отслеживание движения пользователя во многих сценариях.
Критерием, например, может быть критерий, который указывает требуемый источник звука, не создающий никакого звука. В качестве простого примера, критерием может быть требование, чтобы уровень сигнала сигналов аудиодиапазона был ниже порога. Порогом может быть изменяемый порог, который изменяется в ответ на другие параметры.
Согласно дополнительному признаку изобретения схема обновления выполнена с возможностью необновления модели движения пользователя в ответ на ультразвуковые сигналы, когда характеристика сигналов аудиодиапазона удовлетворяет критерию.
Это может улучшить отслеживание движения пользователя во многих сценариях.
Критерием, например, может быть критерий, который указывает требуемый источник звука, создающий звук. В качестве простого примера, критерием может быть требование, чтобы уровень сигнала сигналов аудиодиапазона превышал порог. Порогом может быть изменяемый порог, который изменяется в ответ на другие параметры.
Согласно дополнительному признаку изобретения схема весовых коэффициентов выполнена с возможностью определения задержек весовых коэффициентов ультразвука, чтобы ультразвуковые сигналы соответствовали направлению на источник ультразвука; и определения задержек весовых коэффициентов аудио, чтобы отдельные сигналы аудиодиапазона соответствовали задержкам весовых коэффициентов ультразвука.
Это может обеспечивать упрощенные и/или улучшенные рабочие характеристики во многих сценариях.
Согласно дополнительному признаку изобретения матрица ультразвуковых сенсоров и матрица аудиодиапазона пространственно перекрываются.
Это может обеспечивать упрощенные и/или улучшенные рабочие характеристики во многих сценариях. Матрица ультразвуковых сенсоров и матрица аудиодиапазона специально могут располагаться, по существу, совместно.
Согласно дополнительному признаку изобретения аудиосистема дополнительно содержит ультразвуковой передатчик, выполненный с возможностью передачи ультразвукового испытательного сигнала, и блок оценки выполнен с возможностью оценки характеристики присутствия в ответ на сравнение между характеристикой ультразвукового испытательного сигнала и характеристикой ультразвуковых сигналов, принимаемых от матрицы ультразвуковых сенсоров.
Это может обеспечивать улучшенные рабочие характеристики. Ультразвуковой передатчик может быть ближайшим к матрице ультразвуковых сенсоров и может, по существу, располагаться совместно с ней. В некоторых сценариях ультразвуковой передатчик может быть реализован одним и тем же ультразвуковым преобразователем(-ями) в качестве одного (или нескольких) из ультразвуковых сенсоров.
Согласно дополнительному признаку изобретения ультразвуковой испытательный сигнал представляет собой импульсный ультразвуковой сигнал, и блок оценки выполнен с возможностью выполнения оценки движения в ответ на сравнение сигнальных сегментов ультразвуковых сигналов, соответствующих разным импульсам.
Это может обеспечивать особенно практическое и/или улучшенное обнаружение движения, которое может во многих сценариях улучшать рабочие характеристики аудиосистемы в целом.
Согласно дополнительному признаку изобретения блок оценки выполнен с возможностью оценки положения движущегося объекта в ответ на разность между сигнальными сегментами.
Это может обеспечивать особенно практическое и/или улучшенное обнаружение движения, которое во многих сценариях может улучшать рабочие характеристики аудиосистемы в целом.
Согласно дополнительному признаку изобретения элементы аудиодиапазона представляют собой аудиоприводы, выполненные с возможностью создания звукового сигнала в ответ на возбуждающий сигнал, и отдельные сигналы аудиодиапазона представляют собой возбуждающие сигналы.
Изобретение может предоставлять улучшенные рабочие характеристики и/или упрощенную реализацию и/или работу аудиосистемы, обеспечивающую направленное воспроизведение звука. Подход, например, может предоставлять возможность оптимизации воспроизведения звука для конкретного положения прослушивания.
Согласно аспекту изобретения обеспечивается способ работы для аудиосистемы по п.14 формулы изобретения.
Эти и другие аспекты, признаки и преимущества изобретения очевидны из и истолковываются со ссылкой на вариант(-ы) осуществления, описанный(-ые) ниже в данном документе.
Краткое описание чертежей
Варианты осуществления изобретения описываются только в качестве примеров со ссылкой на чертежи, на которых:
Фиг.1 иллюстрирует пример аудиосистемы согласно некоторым вариантам осуществления изобретения;
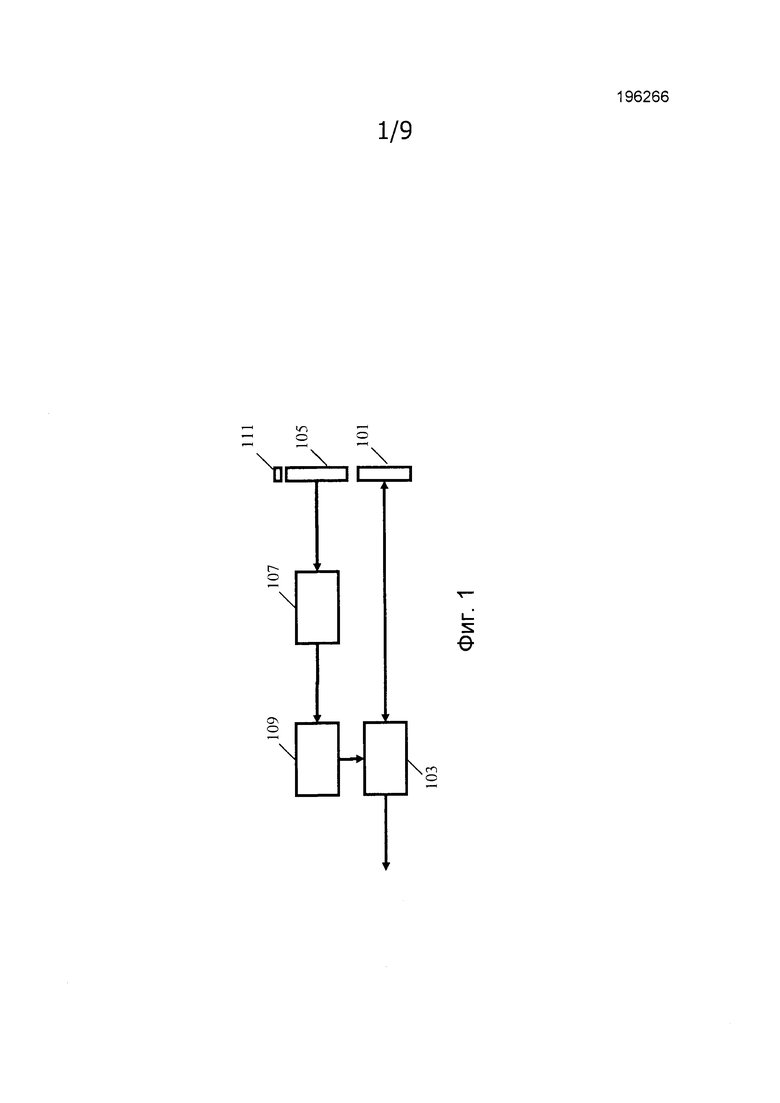
Фиг.2 иллюстрирует пример формирователя луча для матрицы аудиосенсоров;
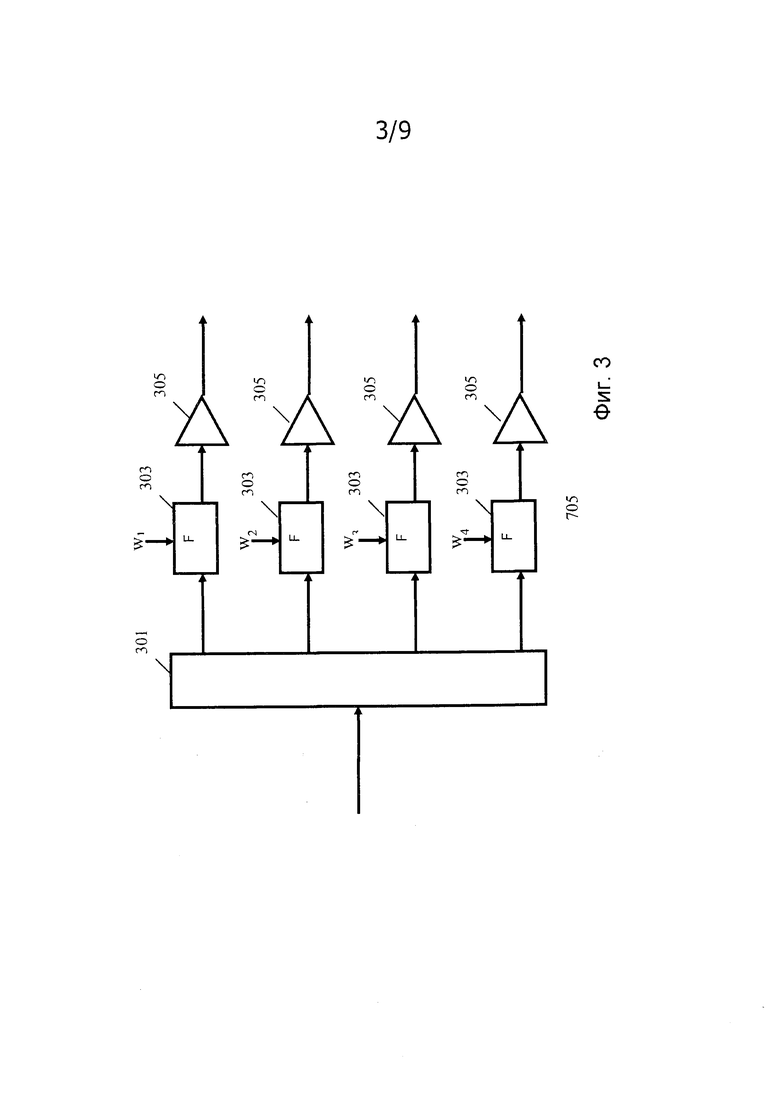
Фиг.3 иллюстрирует пример формирователя луча для матрицы воспроизведения звука;
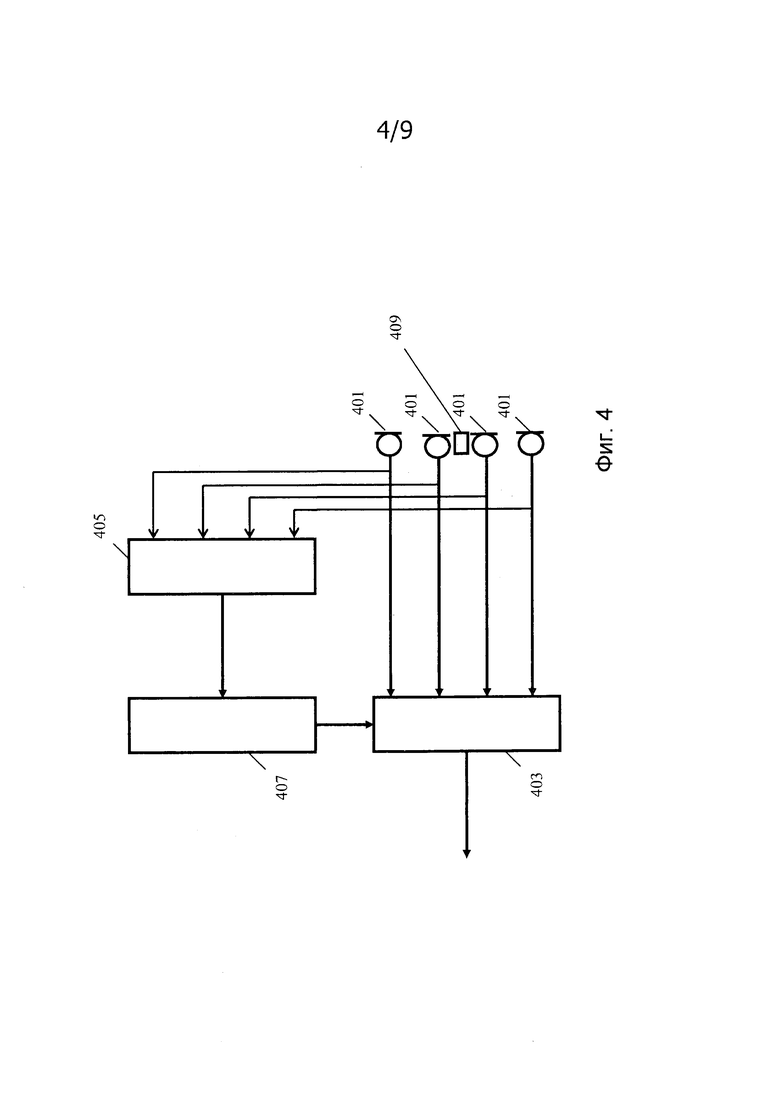
Фиг.4 иллюстрирует пример аудиосистемы согласно некоторым вариантам осуществления изобретения;
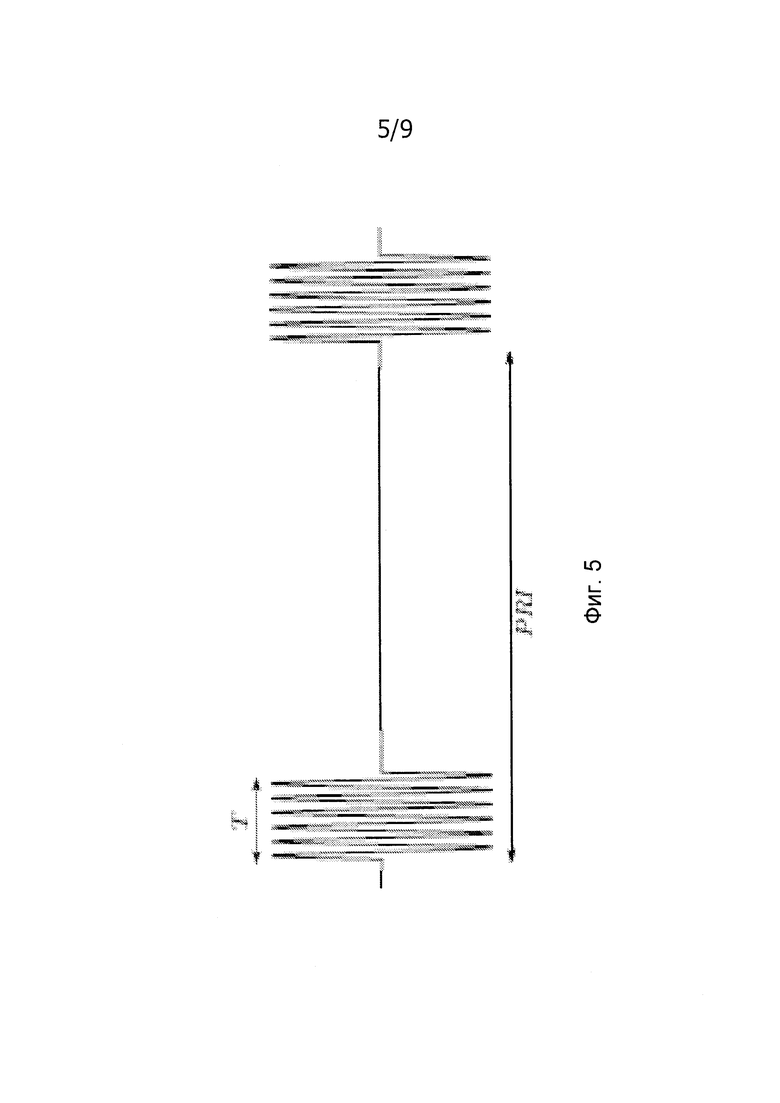
Фиг.5 иллюстрирует пример передаваемого ультразвукового сигнала;
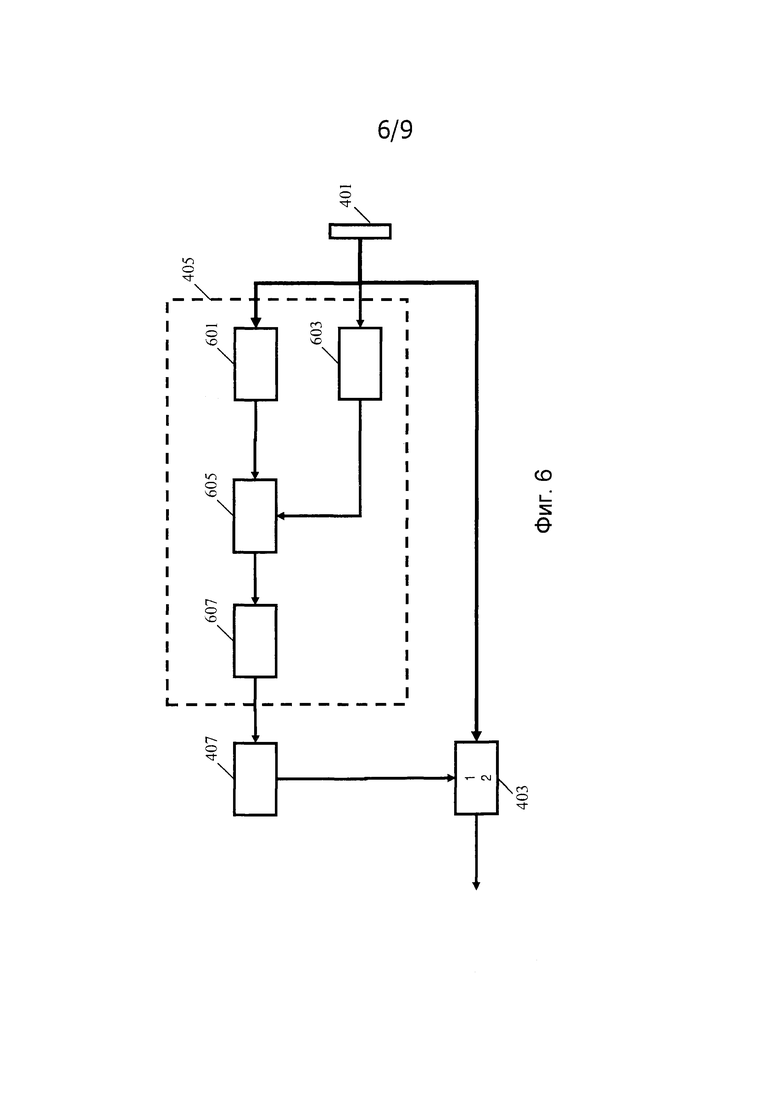
Фиг.6 иллюстрирует пример аудиосистемы согласно некоторым вариантам осуществления изобретения; и
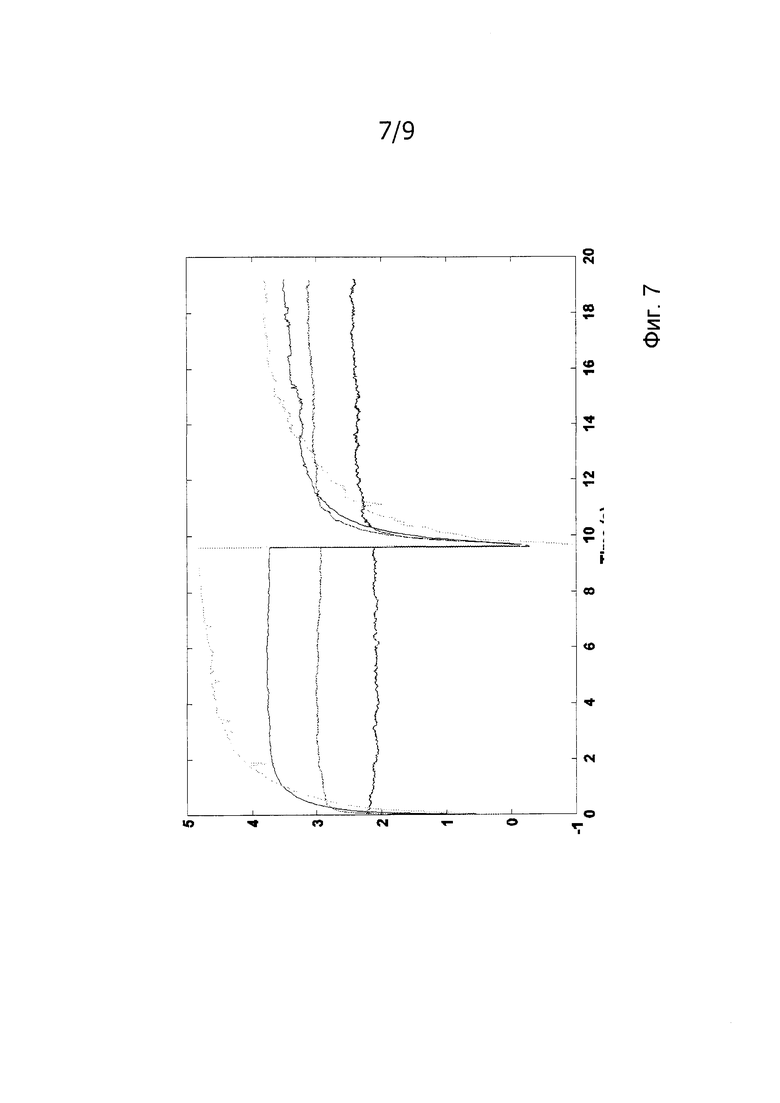
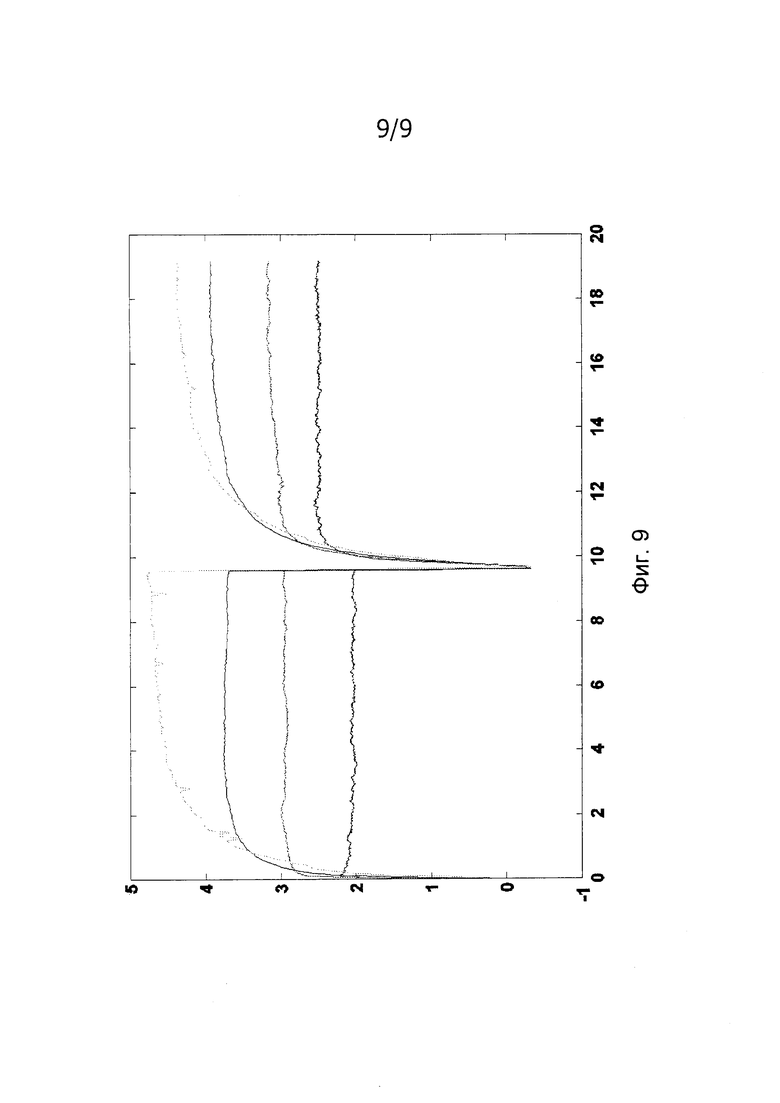
Фиг.7-9 иллюстрируют примеры рабочих характеристик для применения с подавлением реверберации.
Осуществление изобретения
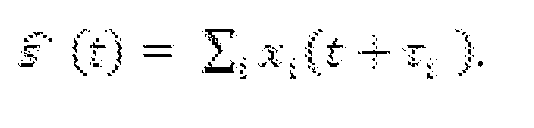
Фиг.1 иллюстрирует пример аудиосистемы согласно некоторым вариантам осуществления изобретения.
Аудиосистема содержит матрицу 101 аудиодиапазона, которая содержит множество элементов/преобразователей аудиодиапазона. Матрица 101 аудиодиапазона может использоваться для обеспечения направленной работы аудиосистемы посредством отдельной обработки сигналов для каждого из элементов аудиодиапазона. Таким образом, объединенный эффект матрицы 101 аудиодиапазона может соответствовать единственному элементу аудиодиапазона, имеющему направленную аудиохарактеристику.
Матрица 101 аудиодиапазона соединена с процессором 103 матрицы, который выполнен с возможностью генерирования диаграммы направленности от матрицы аудиодиапазона посредством отдельной обработки сигналов отдельных сигналов отдельных элементов аудиодиапазона.
В некоторых вариантах осуществления матрица 101 аудиодиапазона может использоваться для воспроизведения звука, и элементы/преобразователи аудиодиапазона могут представлять собой приводы/динамики аудиодиапазона. Таким образом, входной сигнал может подаваться на процессор 101 матрицы, который может генерировать отдельные возбуждающие сигналы для привода аудиодиапазона посредством отдельной обработки входного сигнала. Конкретно, характеристики/весовые коэффициенты фильтра могут устанавливаться отдельно для каждого привода аудиодиапазона, так что результирующие излучаемые сигналы аудиодиапазона складываются или вычитаются по-разному по разным направлениям. Например, когерентное сложение может создаваться в требуемом направлении, причем в других направлениях создается некогерентное (и, таким образом, с уменьшенными уровнями сигнала).
В некоторых вариантах осуществления матрица 101 аудиодиапазона может использоваться для захвата звука, и элементами/преобразователями аудиодиапазона могут быть сенсоры аудиодиапазона. Таким образом, выходной сигнал может генерироваться процессором 101 матрицы посредством отдельной обработки отдельных сигналов сенсора от сенсоров аудиодиапазона и последующего объединения обработанных сигналов. Конкретно, характеристики/весовые коэффициенты фильтра могут устанавливаться отдельно для каждого из сенсоров аудиодиапазона, так что объединение является более или менее когерентным объединением в требуемом направлении.
Фиг.2 иллюстрирует пример, в котором четыре входных сигнала сенсора принимаются от четырех сенсоров аудиодиапазона. Понятно, что матрица в других вариантах осуществления может содержать меньшее или большее количество элементов. Каждый из сигналов усиливается в отдельном малошумящем усилителе 201, после которого каждый сигнал фильтруется в отдельном фильтре 203. Результирующие отфильтрованные сигналы затем подаются на объединитель 205, который, например, может просто суммировать выходные сигналы фильтра.
Фиг.3 иллюстрирует пример, в котором входной сигнал принимается разделителем 301, который генерирует четыре сигнала, один сигнал для каждого из четырех приводов аудиодиапазона. Каждый из сигналов затем фильтруется в отдельном фильтре 303, после которого каждый выходной сигнал фильтра усиливается в подходящем выходном усилителе 305. Каждый из выходных усилителей, таким образом, генерирует возбуждающий сигнал для привода аудиодиапазона.
Направленность матрицы аудиодиапазона, таким образом, может управляться посредством адаптации соответствующим образом отдельных фильтров 203, 303. Конкретно, фильтры 203, 303 могут адаптироваться, так что достигается когерентное суммирование для требуемого направления.
Направленность матрицы аудиодиапазона, следовательно, может изменяться динамически просто изменением характеристик фильтра. Таким образом, луч/диаграмма направленности аудиодиапазона матрицы аудиодиапазона могут управляться посредством изменения весовых коэффициентов фильтров, что известно для специалиста в данной области техники.
Изменение весовых коэффициентов фильтра может конкретно соответствовать изменению одного или нескольких из коэффициента усиления, фазы и задержки. Каждый из этих параметров может быть постоянным для всех частот или может быть частотно-зависимым. Кроме того, изменения весовых коэффициентов фильтра могут выполняться в частотной области и/или временной области. Например, адаптация во временной области может выполняться посредством регулировки коэффициентов (отводов) фильтра с импульсной характеристикой конечной длительности (FIR-фильтра). В качестве другого примера, сигналы могут преобразовываться в частотную область посредством быстрого преобразования Фурье. Результирующий сигнал частотной области затем может фильтроваться посредством применения коэффициентов/весовых коэффициентов к каждому из значений элемента разрешения по частоте. Результирующий отфильтрованный сигнал частотной области затем может преобразовываться обратно во временную область обратным быстрым преобразованием Фурье.
В качестве примера малой сложности фильтры 203, 303 могут просто соответствовать изменяемой задержке. Отмечается, что простая задержка соответствует фильтру, имеющему импульсную характеристику, соответствующую импульсу Дирака во временном положении, соответствующем задержке. Таким образом, введение изменяемой задержки соответствует введению фильтра, в котором коэффициенты взвешиваются для обеспечения требуемой задержки (например, он эквивалентен FIR-фильтру, в котором коэффициент, соответствующий задержке, устанавливается на единицу, и все другие коэффициенты устанавливаются в ноль. Для дробных задержек (относительно моментов выборки) может рассматриваться интерполяция FIR).
Таким образом, подход может соответствовать формирователю луча по принципу задержки и суммирования (DSB) для случая сенсора аудиодиапазона.
В некоторых вариантах осуществления может выполняться более сложная фильтрация и, конкретно, может применяться частотно-зависимая фильтрация. Таким образом, подход может соответствовать формирователю луча по принципу фильтрации и суммирования (FSB) для случая сенсора аудиодиапазона.
Понятно, что в некоторых вариантах осуществления может выполняться дополнительная обработка отдельных сигналов. Например, регулировка или компенсация коэффициента усиления может быть введена для системы воспроизведения аудиодиапазона. Например, калибровка может выполняться для компенсации изменений в характеристиках приводов аудиодиапазона.
В качестве другого примера, объединение примера сенсора аудиодиапазона может принимать во внимание другие сигналы и, например, может вычитать сигналы, которые извлекаются из отдельных сигналов. Например, может быть введено подавление сигналов, принимаемых по боковым лепесткам, посредством вычитания сгенерированной подходящим образом оценки таких сигналов.
Известны различные алгоритмы для управления весовыми коэффициентами формирователя луча аудиодиапазона. Обычно эти алгоритмы определяют весовые коэффициенты для формирователя луча аудиодиапазона, основываясь на знании требуемой направленности, и, следовательно, определяют весовые коэффициенты, основываясь, например, на заданных значениях, связывающих направления с весовыми коэффициентами (например, используя таблицу соответствия). Для случая сенсора аудиодиапазона весовые коэффициенты обычно адаптируются методом обратной связи, основываясь на принятом аудиосигнале. Например, весовые коэффициенты динамически адаптируются для обеспечения максимального уровня сигнала или максимального оценки отношения сигнал-шум.
Однако в системе на Фиг.1 адаптация характеристик фильтра альтернативно или дополнительно зависит от ультразвуковой аудиосреды. Система содержит матрицу 105 ультразвуковых сенсоров, которая содержит множество ультразвуковых сенсоров, которые генерируют множество ультразвуковых сигналов. Ультразвуковые сигналы подаются на процессор 107 оценки, который выполнен с возможностью генерирования оценки присутствия для пользователя в ответ на ультразвуковые сигналы. Процессор 107 оценки соединен с процессором 109 весовых коэффициентов, который дополнительно соединен с процессором 103 матрицы. Процессор 109 весовых коэффициентов выполнен с возможностью определения характеристик фильтра для процессора 103 матрицы в ответ на оценку присутствия.
Система, таким образом, использует характеристики, оцененные из ультразвуковой аудиосреды для управления работой в аудиодиапазоне. Считается, что диапазон ультразвуковых частот может быть от 10 кГц, поскольку считается, что аудиодиапазон может соответствовать частотному диапазону ниже 15 кГц. Аудиодиапазон, таким образом, будет включать в себя частотные интервалы ниже 15 кГц.
В конкретном примере на Фиг.1 система дополнительно содержит ультразвуковой передатчик 111, который выполнен с возможностью излучения ультразвуковых сигналов. Такие сигналы отражаются объектами в комнате, и отраженные сигналы или эхо-сигналы могут захватываться матрицей 105 ультразвуковых сенсоров.
Таким образом, в системе на Фиг.1 характеристики и весовые коэффициенты фильтра могут полностью или частично для по меньшей мере некоторых моментов времени зависеть от принятых ультразвуковых сигналов и особенно от эхо-сигналов от излучаемых ультразвуковых сигналов. Процессор 107 оценки принимает ультразвуковые сигналы от матрицы 105 сенсоров и, основываясь на них, он оценивает характеристику присутствия для пользователя. Характеристика присутствия может в простом примере просто указывать, оценивается ли, что пользователь присутствует или нет. Однако в большинстве вариантов осуществления характеристика присутствия представляет собой указание на положение пользователя. Понятно, что нет необходимости определять полную оценку положения, но в некоторых вариантах осуществления процессор 107 весовых коэффициентов может, например, просто оценивать грубое направление на пользователя. Основываясь на определенной характеристике присутствия, процессор 107 весовых коэффициентов переходит к определению подходящих весовых коэффициентов и приводит к требуемой диаграмме направленности луча для конкретной характеристики присутствия.
В качестве простого примера, аудиосистема может устанавливаться в среде, в которой ультразвуковой передатчик 111 не генерирует никаких существенных эхо-сигналов на матрице 105 ультразвуковых сенсоров (например, в большом пустом пространстве, где все объекты находятся достаточно далеко и не создают существенные эхо-сигналы). Однако, когда пользователь входит в зону впереди ультразвукового передатчика 111 и матрицы 105 ультразвуковых сенсоров, может создаваться существенный эхо-сигнал. Процессор 107 оценки может выполнять очень простое обнаружение посредством сравнения уровня ультразвукового сигнала с порогом и установления индикатора присутствия для указания присутствия пользователя, если превышен порог, и, в противном случае, установления его на указание, что пользователь не обнаружен. Процессор 107 весовых коэффициентов затем может переходить к изменению весовых коэффициентов соответствующим образом. Например, если пользователь не присутствует, весовые коэффициенты могут устанавливаться для обеспечения диаграммы направленности, которая является насколько возможно всенаправленной, и если обнаруживается пользователь, весовые коэффициенты могут устанавливаться для обеспечения заданного узкого луча в направлении номинального положения, где, как предполагается, находится пользователь (например, непосредственно перед матрицей 105 ультразвуковых сенсоров). Такой подход может быть пригодным для многих применений и может использоваться как для воспроизведения/проигрывания аудио, так и для захвата аудио. Например, когда пользователь не присутствует, звук излучается по всем направлениям и/или захватывается со всех направлений. Он может поддерживать периферийных пользователей в разных положениях. Однако, когда пользователь появляется перед системой, аудиосистема автоматически адаптируется и сосредотачивается на этом конкретном пользователе.
Понятно, что система пытается определить характеристику присутствия/положения для пользователя, но может не знать, вызваны ли ультразвуковые сигналы пользователем или другим объектом. Таким образом, считается, что характеристика присутствия может представлять собой характеристику присутствия для объекта. Затем предполагается, что объектом может быть пользователь.
Во многих вариантах осуществления характеристика присутствия может содержать или может состоять из оценки положения (направления) для пользователя, и процессор 107 весовых коэффициентов может быть выполнен с возможностью определения весовых коэффициентов для обеспечения подходящей диаграммы направленности для данного направления (например, посредством подачи луча по этому направлению). Аудиосистема, таким образом, может использовать измерения ультразвука для регулировки направленности луча аудиодиапазона.
Во многих сценариях матрица 105 ультразвуковых сенсоров и матрица 101 аудиодиапазона могут, по существу, располагаться совместно и могут, например, быть рядом друг с другом. Однако во многих вариантах осуществления матрица 105 ультразвуковых сенсоров и матрица 101 аудиодиапазона могут полезно перекрывать друг друга. Таким образом, для применения захвата аудиоапертуры матрицы 105 ультразвуковых сенсоров и матрицы 101 (сенсоров) аудиодиапазона могут перекрывать друг друга. Примером является то, где ультразвуковые сенсоры размещаются между сенсорами аудиодиапазона, так что матрицы чередуются друг с другом. Такой подход обеспечивает улучшенную и упрощенную работу и повышенную точность. Конкретно, нет необходимости в сложных вычислениях для перевода положений относительно матрицы 105 ультразвуковых сенсоров в положения относительно матрицы 101 аудиодиапазона. Скорее, если оцененное направление на пользователя определяется на основе ультразвуковых сигналов, это направление может использоваться непосредственно при определении подходящих весовых коэффициентов фильтра для сигналов аудиодиапазона.
Ниже описываются более конкретные примеры системы. Описание сосредоточено на системе захвата аудио, которая адаптирует диаграмму направленности луча аудио по направлению к требуемому источнику звука. Аудиосистема, например, может представлять собой систему телеконференции.
В примере матрица 105 ультразвуковых сенсоров и матрица 101 аудиодиапазона не только располагаются совместно или перекрываются, но фактически используют одни и те же элементы аудиодиапазона. Фиг.4 иллюстрирует пример примерной системы захвата аудио.
Система по Фиг.4 содержит матрицу аудиодиапазона преобразователей аудиодиапазона в виде широкополосных сенсоров 401 аудиодиапазона. Каждый из широкополосных аудиосенсоров 401 захватывает звук в широком диапазоне, который охватывает по меньшей мере часть аудиодиапазона и диапазон ультразвуковых частот. Действительно, активный частотный интервал для захвата широкополосными аудиосенсорами 401 включает в себя частоты ниже 2 кГц и выше 10 кГц (или ниже 500 Гц или 1 кГц и/или выше 15 кГц или 20 кГц во многих сценариях).
Таким образом, каждый из широкополосных аудиосенсоров 401 представляет собой как сенсор аудиодиапазона, так и ультразвуковой сенсор. Следовательно, одни и те же сенсоры используются как для обеспечения захваченного ввода аудио, так и для ввода ультразвука.
Широкополосные аудиосенсоры 401 соединены с процессором 403 матрицы, который выполняет фильтрацию и объединение сигналов аудиодиапазона, как описано для процессора 103 матрицы на Фиг.1. Однако во многих сценариях процессор 103 матрицы может дополнительно выполнять фильтрацию нижних частот сигналов для ограничения сигналов аудиодиапазоном.
Аналогично, широкополосные аудиосенсоры 401 соединены с блоком 405 оценки, который выполнен с возможностью определения характеристики присутствия для пользователя, по этим же линиям, что и блок 107 оценки присутствия на Фиг.7. Блок 405 оценки соединен с процессором 407 весовых коэффициентов, который выполнен с возможностью определения весовых коэффициентов для процессора 403 матрицы, основываясь на характеристиках присутствия, соответствующей подходу процессора 107 весовых коэффициентов на Фиг.1.
В системе, где одни и те же сигналы преобразователя используются как для обработки аудиодиапазона, так и для обработки ультразвука, соответствующие ультразвуковые сигналы, например, могут генерироваться фильтрацией верхних частот сигналов преобразователя, и сигналы аудиодиапазона могут генерироваться фильтрацией нижних частот сигнала преобразователя.
Сигнал аудиодиапазона может иметь по меньшей мере 80% от общей энергии сигнала ниже 10 кГц, тогда как ультразвуковой сигнал может иметь по меньшей мере 80% от общей энергии сигнала выше 10 кГц.
Система дополнительно содержит ультразвуковой передатчик 409, который расположен в центральной части аудиоматрицы 401.
Система по Фиг.4 может работать аналогично системе, описанной для применения захвата по Фиг.1. Однако обычно система может использоваться конкретно для оценки положений пользователя, основываясь на ультразвуковых сигналах, и эта оценка положения может использоваться для полного или частичного управления весовыми коэффициентами объединения аудиодиапазона, чтобы обеспечивать требуемую направленную чувствительность захвата аудио.
Понятно, что весовые коэффициенты могут не только определяться на основе оценки присутствия или положения, генерируемой из ультразвуковых сигналов, но могут в некоторых сценариях альтернативно или дополнительно генерироваться на основе сигналов аудиодиапазона, захваченных аудиоматрицей 401 (и обычно генерироваться посредством фильтрации их или в некоторых случаях использоваться непосредственно, когда составляющие ультразвуковых сигналов являются незначительными при выполнении обработки аудиодиапазона). Например, аудиосистема может включать в себя обычную функциональную возможность для адаптации весовых коэффициентов формирователя луча для аудиоматрицы. Однако в течение интервалов отсутствия звука или при инициализации ультразвуковые сигналы могут использоваться для определения подходящих весовых коэффициентов, которые могут использоваться для алгоритма формирования луча. Таким образом, инициализация алгоритма формирования луча аудио может выполняться с использованием весовых коэффициентов, определенных из ультразвуковых сигналов.
Использование широкополосных сенсоров в качестве как сенсоров аудиодиапазона, так и ультразвуковых сенсоров, обеспечивает ряд преимуществ. Действительно, это может упрощать реализацию и производство, так как используется меньшее количество сенсоров. Это может уменьшать затраты и часто уменьшать форм-фактор сенсорного сегмента аудиосистемы. Это может, например, делать возможным реализацию аудиосистемы телеконференции с использованием описанного подхода в единственном, относительно небольшом корпусе. Однако подход может дополнительно обеспечивать улучшенные рабочие характеристики и может, в частности, обеспечивать более высокую точность и/или уменьшенную или упрощенную обработку сигнала с уменьшенной сложностью. Действительно, часто может существенно упрощаться перевод между разными матрицами сенсоров аудиодиапазона и ультразвуковых сенсоров. Действительно, во многих сценариях параметры, определенные так, чтобы приводить к когерентному сложению для ультразвуковых сигналов, могут непосредственно использоваться в качестве параметров для формирования луча аудио. Например, одни и те же задержки могут использоваться для каждого отдельного пути.
В качестве конкретного примера, система может использоваться для связи через гарнитуру, где один или несколько пользователей выполняют связь с удаленно расположенными пользователями, используя стационарную систему. Чтобы обеспечить высококачественный интерфейс, формирование акустического луча может выполняться для того, чтобы определить местоположение источников и направить акустический луч на эти местоположения. Однако это обычно требует, чтобы источники были (акустически) активными. В обычных системах в течение и непосредственно после периодов неактивности должны обновляться весовые коэффициенты формирования луча, если источники переместились, приводя к снижению качества. В качестве примерного сценария рассмотрим активный источник в некотором местоположении. Источник затихает и перемещается в другое местоположение и затем снова становится активным. Связь первоначально будет ухудшаться, так как весовые коэффициенты формирователя акустического луча требуют обновления. Также, если имеются акустические источники, не относящиеся к человеку, такие как телевизор или ноутбук, работающие в среде, весовые коэффициенты формирования луча, которые вычисляются, могут быть неточными, приводя к низкому качеству или даже перерыву связи.
Однако в настоящей системе такие недостатки могут быть уменьшены посредством ультразвуковых сигналов, используемых для отслеживания и обновления весовых коэффициентов во время интервалов без акустической активности. Кроме того, маловероятно, что внешние источники шума будут оказывать влияние на обработку ультразвука, таким образом, обеспечивая более надежные оценки, которые могут использоваться в случае чрезмерного нежелательного шума.
Во многих вариантах осуществления характеристика присутствия, таким образом, представляет собой оценку или указание положения, такие как, например, направление на предполагаемого пользователя. Оценка положения может определяться в ответ на ультразвуковой сигнал, передаваемый ультразвуковым передатчиком 409. В частности, составляющие сигнала в ультразвуковом диапазоне могут использоваться для вычисления местоположений пользователя на основе обработки времени распространения волн, которая позволяет выполнять вычисления дальности и/или обработки направления прихода волны для угловой информации.
Ниже описывается пример на основе ультразвукового передатчика, передающего импульсный сигнал, например, такой как сигнал, изображенный на Фиг.5. В примере T обозначает длительность, в течение которой передается импульс, содержащий синусоиды, и PRI обозначает длительность, в течение которой могут приниматься эхо-сигналы.
Блок 405 оценки для каждого импульса может коррелировать принятый ультразвуковой сигнал от каждого широкополосного аудиосенсора с задержанными версиями переданного импульса. Задержка, которая приводит к самой большой корреляции, может рассматриваться как соответствующая времени распространения волны для ультразвукового сигнала, и относительная разность в задержках (и, таким образом, в моментах времени распространения волны) между элементами матрицы может использоваться для определения направления к объекту, отражающему ультразвук.
В некоторых вариантах осуществления ультразвуковые сигналы также используются для обеспечения оценки движения для пользователя. Конкретно, ультразвуковая оценка положения может основываться на движущихся объектах, т.е. на изменениях в эхо-сигналах, принимаемых широкополосными сенсорами.
Например, ультразвуковой передатчик может испускать последовательность импульсов, например, тех, которые показаны на Фиг.5. Блок 405 оценки затем может переходить к определению сначала дальности только до движущихся объектов от матрицы 401 широкополосных сенсоров, исключая статические объекты из рассмотрения. Блок 405 оценки в примере переходит к рассмотрению разности принятых сигналов из двух последовательных импульсов передачи, а не рассмотрению каждого отклика отдельно. Эхо-сигналы от статических объектов приводят к одному и тому же вкладу в принятые сигналы из последовательных импульсов передачи, и, следовательно, разность будет равной (близкой к) нулю. Эхо-сигналы от движущихся источников, с другой стороны, приводят к сигналу с ненулевой разностью. Затем вычисляется мощность сигнала на элемент разрешения по дальности, основываясь на сигнале разности. Движущийся источник определяется присутствующим в некотором элементе разрешения по дальности, если вычисленная мощность сигнала превышает порог обнаружения. Порог обнаружения может адаптироваться к окружающему уровню шума. Определив радиальную дальность, может быть вычислено угловое положение посредством определения направления прихода (DoA) волны от движущихся источников. Дальность вместе с углом дают мгновенное местоположение каждого движущегося источника.
Оценка местоположения (азимут), обеспечиваемая ультразвуковой матрицей, может переводиться в относительные задержки, которые имеют место, когда аудиосигнал, исходящий из этого местоположения, распространяется на аудиосенсоры матрицы 401. Для ясности и простоты и без потери общности однородная линейная матрица аудиосенсоров предполагается с межэлементным промежутком d m. Пусть θus обозначает оценку местоположения аудиоисточника (объекта, отражающего ультразвуковые сигналы) относительно матрицы 401 широкополосных сенсоров.
Предполагая модель в дальней зоне, распространение плоских волн, задержка в секундах на сенсоре i матрицы относительно первого сенсора определяется по формуле
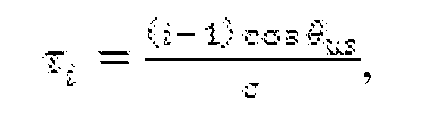
где c представляет собой скорость звука в воздухе. Сигнал, принимаемый на сенсоре i, может быть записан как:

где s(t) представляет собой требуемый звук, и ni(t) представляет собой шумовой сигнал на сенсоре i.
Относительные задержки, требуемые для формирования луча в направлении предполагаемого пользователя, теперь могут быть вычислены из оценки местоположения, обеспечиваемой ультразвуковой матрицей. Сигналы от аудиосенсоров могут конкретно компенсироваться, так что сигналы для определенного направления суммируются когерентно в структуре формирователя луча по принципу задержки и суммирования (DSB):
Понятно, что вышеприведенное уравнение может быть реализовано соответствующей задержкой входных сигналов для обеспечения причинной связи.
Конкретным преимуществом многих систем, в которых матрица аудиодиапазона и ультразвуковая матрица расположены близко друг к другу, и, в частности, систем, в которых одни и те же сенсоры обеспечивают как ультразвуковые сигналы, так и сигналы аудиодиапазона, является то, что оценка относительных задержек τi, полученная из ультразвуковых сигналов, может непосредственно использоваться для сигнала аудиоиапазона.
Это исключает потенциальную потерю точности в необходимости перевода задержек в оценку местоположения относительно ультразвуковой матрицы и затем перевода этого положения обратно в задержки для матрицы аудиодиапазона, которая может располагаться где-то в другом месте.
Таким образом, во многих вариантах осуществления аудиосистема может непосредственно определять задержки весовых коэффициентов ультразвука для ультразвуковых сигналов, которые соответствуют направлению ультразвукового источника (такого как отражающий объект). Задержки весовых коэффициентов аудиодиапазона для отдельных сигналов аудиодиапазона затем могут непосредственно использоваться так, чтобы соответствовать задержкам весовым коэффициентам ультразвука. В таких сценариях характеристика присутствия действительно может представляться самими определенными задержками.
Отмечается, что, хотя подход был описан с конкретной ссылкой на DSB, он также применим, например, к более сложным формирователям луча, таким как формирователь луча по принципу фильтрации и суммирования (FSB) или формирователь с подавлением сигналов, принимаемым по боковым лепесткам.
Подход может обеспечивать ряд преимуществ. Например, установка в исходное состояние фильтров на задержки, соответствующие местоположению, определенному ультразвуковыми сигналами после периода акустической неактивности пользователем, и затем предоставление возможности фильтрам адаптироваться, когда аудиодиапазон становится активным, гарантирует более быструю сходимость, чем случай, когда необходима адаптация фильтров, соответствующих старому местоположению.
Аудиосистема по Фиг.1 может быть выполнена с возможностью отслеживания движения пользователя, когда оцененное движение обновляется с использованием результатов как из аудиодиапазона, так и диапазона ультразвуковых частот. Формирование луча аудио тогда может основываться на оценке текущего положения для пользователя. Например, информация о прошлом местоположении может объединяться с моделью движения для получения траекторий движения пользователя, когда модель может непрерывно обновляться, основываясь на текущем положении, оцененном из или сигналов аудиодиапазона, ультразвуковых сигналов или из обоих. Моделью движения пользователя, например, может быть простая модель, которая, например, просто использует оцененное в последний раз положение в качестве текущего положения, или может быть более сложной и, например, может реализовывать сложные модели движения, которые могут предсказывать движение и объединять оценки положения из диапазона как ультразвуковых частот, так и аудиочастот. Информация о местоположении и траектории движения, например, затем может использоваться в качестве априорного ввода в формирователь акустического луча, т.е. процессор 403 матрицы после паузы в аудио от требуемого источника сигнала может инициализироваться с весовыми коэффициентами, соответствующими оцененному положению пользователя.
Это может быть особенно полезным, например, тогда, когда аудиоисточником является человек, который движется из местоположения A в местоположение B, не разговаривая. Система только с аудио не может отслеживать это движение из-за отсутствия слышимого сигнала, и необходимо время для сходимости к корректным весовым коэффициентам, если человек начинает говорить из местоположения B. Использование местоположения, оцененного от ультразвуковой матрицы, решает эту проблему, так как она может постоянно отслеживать пользователя во время движения из местоположения A в местоположение B.
Фиг.6 иллюстрирует пример того, как аудиосистема по Фиг.4 может быть реализована с использованием модели движения, которая обновляется на основе оценок положения, генерируемых как из ультразвуковых сигналов, так и из сигналов аудиодиапазона.
В примере блок 405 оценки содержит ультразвуковой блок 601 оценки положения, который принимает сигналы от широкополосных аудиосенсоров 401 и который генерирует оценку положения из составляющих ультразвукового сигнала. Может использоваться, например, ранее описанный подход.
Блок 405 оценки дополнительно содержит блок 603 оценки положения аудиодиапазона, который принимает сигналы от широкополосных аудиосенсоров 401 и который генерирует оценку положения из составляющих сигнала аудиодиапазона. Понятно, что может использоваться любой подходящий алгоритм, включая, например, адаптивный алгоритм, определяющий относительные задержки, которые приводят к максимальному суммированному уровню сигнала. Также понятно, что в некоторых вариантах осуществления определение положения может интегрироваться с процессом формирования луча процессора 403 матрицы, например, аудиосистемой, включающей в себя цепь обратной связи от процессора 403 матрицы к блоку 603 оценки положения аудиодиапазона.
Ультразвуковой блок 601 оценки положения и блок 603 оценки положения аудиодиапазона подсоединены к процессору 605 обновления, который дополнительно соединен с моделью 607 движения. Модель 607 движения представляет собой модель, которая генерирует оценку положения для пользователя. Процессор 605 обновления управляет моделью движения, основываясь на оценках положения от ультразвукового блока 601 оценки положения и блока 603 оценки положения аудиодиапазона.
В качестве простого примера, модель 607 движения может просто содержать память, которая хранит самую последнюю оценку положения, обеспечиваемую процессором 605 обновления. Процессор 605 обновления может непрерывно оценивать оценки положения диапазона ультразвуковых и аудиочастот и переходит к передаче оценки положения, которая считается достоверной. Если обе считаются достоверными, может передаваться средняя оценка положения, и если ни одна из них не считается достоверной, не передается ни одна из оценок положения.
Понятно, что может использоваться любой подходящий подход для определения, является ли оценка положения достоверной. Например, оценка положения может просто считаться достоверной, если уровень сигнала объединенного сигнала выше данного порога, и, в противном случае, может рассматриваться недостоверной.
В некоторых вариантах осуществления может использоваться, таким образом, ультразвуковая оценка положения, если сигналы аудиодиапазона удовлетворяют критерию. Например, если сигналы аудиодиапазона не объединяются для генерирования достаточно высокого уровня сигнала, модель пользователя не обновляется на основе оценки положения аудиодиапазона, но, вместо этого, модель пользователя обновляется на основе ультразвуковой оценки положения. Таким образом, если является вероятным, что пользователь не говорит, ультразвуковые сигналы используются для оценки положения.
В некоторых вариантах осуществления ультразвуковая оценка положения может не использоваться, если сигналы аудиодиапазона удовлетворяют критерию. Например, если сигналы аудиодиапазона действительно объединяются для генерирования достаточно высокого уровня сигнала, модель пользователя не обновляется на основе ультразвуковой оценки положения, но, вместо этого, модель пользователя обновляется на основе оценки положения аудиодиапазона. Таким образом, если является вероятным, что пользователь говорит, сигналы аудиодиапазона используются для оценки положения.
Таким образом, в некоторых вариантах осуществления обработка матрицы может переключаться между ультразвуком и слышимым звуком, например, чтобы экономить мощность, являющуюся результатом активной передачи ультразвука. Следовательно, когда обнаруживается слышимая активность (в области частот слуха человека), система переключается с ультразвукового режима в режим аудиодиапазона. Во время переключения весовые коэффициенты формирования луча аудиоинициализируются самыми последними оценками местоположения, предоставленными ультразвуковыми сигналами. До тех пор пока продолжается слышимая активность, аудиосигналы диапазона используются для определения местоположения пользователя. Когда уровни слышимой активности падают ниже установленного порога, система переключается в ультразвуковой режим.
В качестве другого примера, улучшенные рабочие характеристики обнаружения могут достигаться с использованием совместного определения местоположения посредством ультразвука и аудиодиапазона следующим образом. В ультразвуковом режиме, если пользователь не обнаружен, возможно, из-за отсутствия существенного движения в течение длительности времени, система может переключиться в режим аудиодиапазона, если слышимая активность выше установленного порога. Это может улучшить общее обнаружение пользователя. Система может возвратиться в ультразвуковой режим, если обнаруживается движение. Альтернативно, система может оставаться в режиме аудиодиапазона, пока слышимая активность остается выше установленного порога.
Пример преимуществ, которые могут достигаться системой, может демонстрироваться рассмотрением применения подавления реверберации, где используется формирование луча для уменьшения величины реверберации, захваченной матрицей. Реверберация оказывает влияние на ясность речи, которая может оцениваться количественно посредством индекса ясности или C50, который представляет собой отношение (в дБ) энергии звука, поступающего в ухо в течение 50 мс, после того как он генерируется, к энергии звука, который поступает после 50 мс. Рабочие характеристики формирователей луча, которые выполняют подавление реверберации, таким образом, могут измеряться улучшением индекса ясности, который получается из обработки.
Фиг.7 иллюстрирует пример улучшения в C50, обеспечиваемом обычным формирователем луча для разных длин фильтра. Пользователь находится перед матрицей в течение первых приблизительно 10 с и под углом 45 градусов в течение следующих 10 с. Когда пользователь изменяет свое местоположение, можно видеть, что имеется резкое снижение рабочих характеристик, и системе необходимо несколько секунд для сходимости, особенно когда используются длинные фильтры. Это важная проблема во многих системах связи через гарнитуру, где пользователь свободно двигается во время разговора.
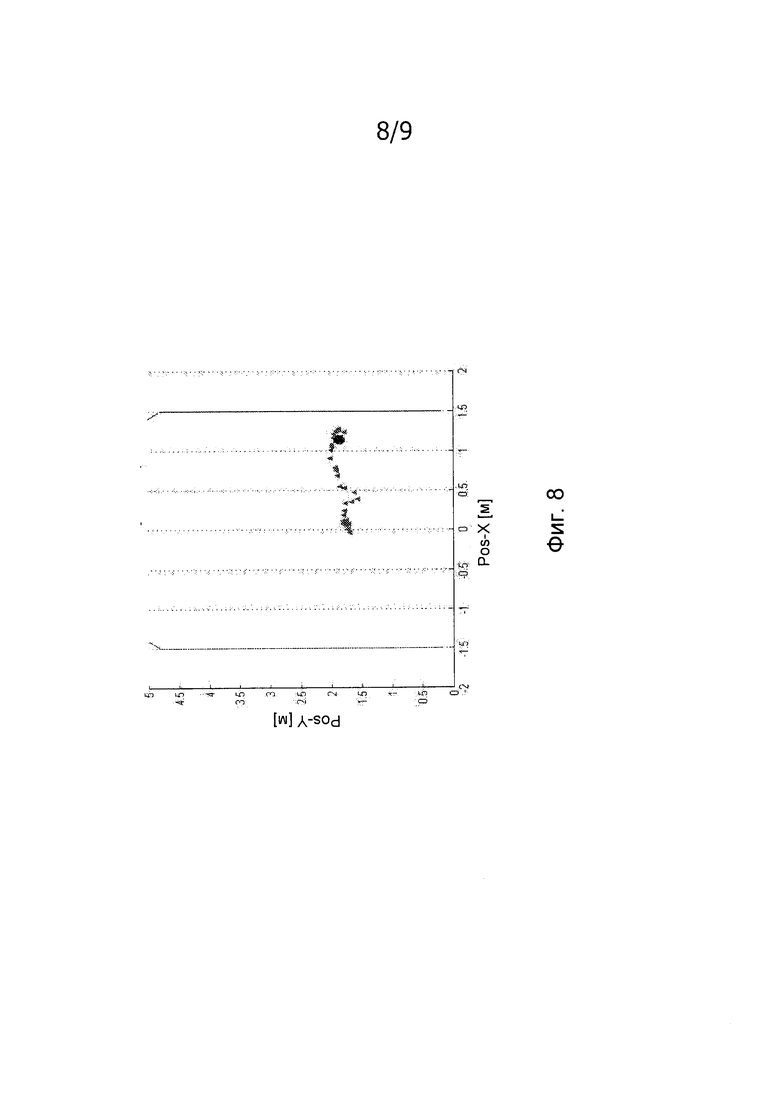
Такая проблема может быть уменьшена в аудиосистемах описанного подхода, так как система может непрерывно отслеживать пользователей, используя ультразвуковые сигналы и/или акустические сигналы. Конкретно, как показано на Фиг.8, отслеживание может выполняться с использованием ультразвуковых сигналов, когда пользователь движется из положения перед сенсором (0 градусов) в положение под углом 45 градусов.
Это изменение в местоположении обеспечивается как ввод в формирователь луча. Весовые коэффициенты формирователя луча затем могут сбрасываться к задержкам, соответствующим новому местоположению. Фиг.9 иллюстрирует соответствующее улучшение в C50. Ясно, что более быстрая сходимость может наблюдаться, когда обеспечиваются точные оценки местоположения.
Понятно, что вышеприведенное описание для ясности описало варианты осуществления изобретения со ссылкой на разные функциональные схемы, блоки и процессоры. Однако очевидно, что любое подходящее распределение функциональных возможностей между разными функциональными схемами, блоками или процессорами может использоваться без принижения значимости изобретения. Например, изображенная функциональная возможность, выполняемая отдельными процессорами или контроллерами, может выполняться одним и тем же процессором или контроллерами. Следовательно, ссылки на конкретные функциональные блоки или схемы должны рассматриваться только как ссылки на подходящие средства для обеспечения описанных функциональных возможностей, а не как указывающие на строгую логическую или физическую структуру или организацию.
Изобретение может быть реализовано в любом подходящем виде, включая аппаратное, программное, аппаратно-программное обеспечение или любую их комбинацию. Изобретение может необязательно быть реализовано, по меньшей мере частично, в виде компьютерного программного обеспечения, выполняющегося на одном или нескольких процессорах для обработки данных и/или процессорах цифровой обработки сигналов. Элементы и компоненты варианта осуществления изобретения могут физически, функционально и логически быть реализованы любым подходящим образом. Действительно, функциональные возможности могут быть реализованы в единственном блоке, во множестве блоков или как часть других функциональных блоков. По существу, изобретение может быть реализовано в единственном блоке или может быть физически и функционально распределено между разными блоками, схемами и процессорами.
Хотя настоящее изобретение было описано в связи с некоторыми вариантами осуществления, предполагается, что оно не ограничивается конкретной формой, изложенной в данном документе. Скорее, объем настоящего изобретения ограничивается только прилагаемой формулой изобретения. Кроме того, хотя признак может выглядеть описываемым в связи с конкретными вариантами осуществления, для специалиста в данной области техники понятно, что различные признаки описанных вариантов осуществления могут быть объединены согласно изобретению. В формуле изобретения термин «содержащий» не исключает присутствия других элементов или этапов.
Кроме того, хотя они отдельно перечислены, множество средств, элементов, схем или этапов способа могут быть реализованы, например, единственной схемой, блоком или процессором. Дополнительно, хотя отдельные признаки могут быть включены в разные пункты формулы изобретения, они, возможно, могут быть полезно объединены, и включение в разные пункты формулы изобретения не подразумевает, что объединение признаков не является выполнимым и/или полезным. Также, включение признака в одну категорию пунктов формулы изобретения не подразумевает ограничение этой категорией, но, скорее, указывает, что признак в равной степени применим к другим категориям формулы изобретения соответствующим образом. Кроме того, порядок признаков в формуле изобретения не подразумевает какой-либо конкретный порядок, в котором признаки должны обрабатываться, и, в частности, порядок отдельных этапов в формуле изобретения на способ не подразумевает, что этапы должны выполняться в данном порядке. Скорее, этапы могут выполняться в любом подходящем порядке. Кроме того, употребление элементов в единственном числе не исключает их множества. Ссылочные символы в формуле изобретения предусматриваются просто в качестве разъясняющего примера и не должны толковаться никоим образом как ограничивающие объем формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АУДИОСИСТЕМА И СПОСОБ ДЛЯ НЕЕ | 2012 |
|
RU2595912C2 |
| АУДИОСИСТЕМА И СПОСОБ ОПЕРИРОВАНИЯ ЕЮ | 2012 |
|
RU2595943C2 |
| УЛЬТРАЗВУКОВОЕ ДОППЛЕРОВСКОЕ АУДИОУСТРОЙСТВО КОНТРОЛЯ КРОВОТОКА СО СМЕЩЕНИЕМ ОСНОВНОГО ТОНА | 2010 |
|
RU2536418C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ВОСПРОИЗВЕДЕНИЯ ЗВУКА | 2011 |
|
RU2589377C2 |
| АКУСТИЧЕСКАЯ СИСТЕМА И СПОСОБ ЕЕ РАБОТЫ | 2011 |
|
RU2575883C2 |
| ОЦЕНКА МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ЗВУКА С ИСПОЛЬЗОВАНИЕМ ФИЛЬТРОВАНИЯ ЧАСТИЦ | 2009 |
|
RU2511672C2 |
| ТРАНСКОДИРОВЩИК АУДИО ФОРМАТА | 2010 |
|
RU2519295C2 |
| УЛУЧШЕННОЕ ПРОСТРАНСТВЕННОЕ РАЗРЕШЕНИЕ ЗВУКОВОГО ПОЛЯ ДЛЯ СИСТЕМ МНОГОКАНАЛЬНОГО ВОСПРОИЗВЕДЕНИЯ АУДИО ПОСРЕДСТВОМ ПОЛУЧЕНИЯ СИГНАЛОВ С УГЛОВЫМИ ЧЛЕНАМИ ВЫСОКОГО ПОРЯДКА | 2007 |
|
RU2420027C2 |
| ЗАХВАТ АУДИО С ИСПОЛЬЗОВАНИЕМ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ | 2018 |
|
RU2751760C2 |
| Аудиоустройство, система распределения аудио и способ их работы | 2019 |
|
RU2816884C2 |
Изобретение относится к аудиосистемам. Заявлены аудиосистема и способ ее работы, причем особенностью заявленной аудиосистемы является то, что она содержит схему аудиоматрицы для генерирования диаграммы направленности матрицы аудиодиапазона посредством применения весовых коэффициентов к отдельным сигналам аудиодиапазона для элементов аудиодиапазона, причем схема аудиоматрицы выполнена с возможностью генерирования направленного выходного сигнала посредством объединения сигналов аудиодиапазона от аудиосенсоров, причем объединение содержит применение весовых коэффициентов к отдельным сигналам аудиодиапазона; схему весовых коэффициентов для определения весовых коэффициентов в ответ на характеристику присутствия; модель движения пользователя, выполненную с возможностью отслеживания положения пользователя; и схему обновления для обновления модели движения пользователя в ответ как на ультразвуковые сигналы, так и на сигналы аудиодиапазона. Техническим результатом является обеспечение оптимизации воспроизведения звука для конкретного положения прослушивания. 2 н. и 9 з.п. ф-лы, 9 ил.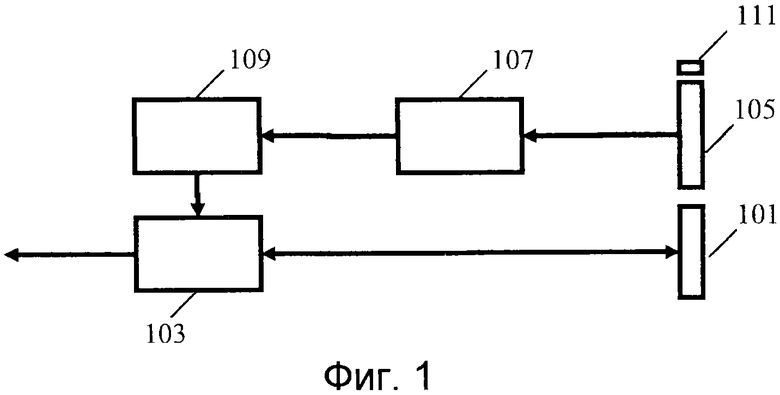
1. Аудиосистема, содержащая:
ультразвуковой передатчик (111), выполненный с возможностью передачи ультразвукового испытательного сигнала;
матрицу (105) ультразвуковых сенсоров, содержащую множество ультразвуковых сенсорных элементов;
блок (107) оценки для оценки характеристики присутствия пользователя в ответ на сравнение между характеристикой ультразвукового испытательного сигнала и характеристикой ультразвуковых сигналов, принимаемых от матрицы ультразвуковых сенсоров;
матрицу (101) аудиодиапазона, содержащую множество элементов аудиодиапазона, причем элементы аудиодиапазона представляют собой аудиосенсоры;
схему (103) аудиоматрицы для генерирования диаграммы направленности матрицы аудиодиапазона посредством применения весовых коэффициентов к отдельным сигналам аудиодиапазона для элементов аудиодиапазона, причем схема (103) аудиоматрицы выполнена с возможностью генерирования направленного выходного сигнала посредством объединения сигналов аудиодиапазона от аудиосенсоров, причем объединение содержит применение весовых коэффициентов к отдельным сигналам аудиодиапазона;
схему (109) весовых коэффициентов для определения весовых коэффициентов в ответ на характеристику присутствия;
модель (607) движения пользователя, выполненную с возможностью отслеживания положения пользователя; и
схему (605) обновления для обновления модели движения пользователя в ответ как на ультразвуковые сигналы, так и на сигналы аудиодиапазона.
2. Аудиосистема по п. 1, в которой характеристика присутствия содержит оценку положения, и схема (103) аудиоматрицы выполнена с возможностью определения весовых коэффициентов в ответ на характеристику положения.
3. Аудиосистема по п. 1, содержащая множество широкополосных сенсоров, каждый из которых представляет собой как ультразвуковой сенсор матрицы (105) ультразвуковых сенсоров, так и аудиосенсор матрицы (101) аудиодиапазона.
4. Аудиосистема по п. 3, в которой множество широкополосных сенсоров образует как матрицу (105) ультразвуковых сенсоров, так и матрицу (101) аудиодиапазона.
5. Аудиосистема по п. 1, в которой схема (605) обновления выполнена с возможностью обновления модели (607) движения пользователя в ответ на ультразвуковые сигналы, когда характеристика сигналов аудиодиапазона удовлетворяет критерию.
6. Аудиосистема по п. 1, в которой схема (605) обновления выполнена с возможностью необновления модели (607) движения пользователя в ответ на ультразвуковые сигналы, когда характеристика сигналов аудиодиапазона удовлетворяет критерию.
7. Аудиосистема по п. 1, в которой схема (407) весовых коэффициентов выполнена с возможностью определения задержек весовых коэффициентов ультразвука, чтобы ультразвуковые сигналы соответствовали направлению на источник ультразвука; и определения задержек весовых коэффициентов аудио, чтобы отдельные сигналы аудиодиапазона соответствовали задержкам весовых коэффициентов ультразвука.
8. Аудиосистема по п. 1, в которой матрица (105) ультразвуковых сенсоров и матрица (101) аудиодиапазона пространственно перекрываются.
9. Аудиосистема по п. 1, в которой ультразвуковой испытательный сигнал представляет собой импульсный ультразвуковой сигнал, и блок (107) оценки выполнен с возможностью выполнения оценки движения в ответ на сравнение сигнальных сегментов ультразвуковых сигналов, соответствующих разным импульсам.
10. Аудиосистема по п. 9, в которой блок (107) оценки выполнен с возможностью оценки положения движущегося объекта в ответ на разность между сигнальными сегментами.
11. Способ работы аудиосистемы, включающей в себя матрицу (105) ультразвуковых сенсоров, содержащую множество ультразвуковых сенсорных элементов, и матрицу (101) аудиодиапазона, содержащую множество элементов аудиодиапазона, причем элементы аудиодиапазона представляют собой аудиосенсоры, при этом способ содержит:
передачу ультразвукового испытательного сигнала;
оценку характеристики присутствия пользователя в ответ на сравнение между характеристикой ультразвукового испытательного сигнала и характеристикой ультразвуковых сигналов, принимаемых от матрицы ультразвуковых сенсоров;
генерирование диаграммы направленности матрицы аудиодиапазона посредством применения весовых коэффициентов к отдельным сигналам аудиодиапазона для элементов аудиодиапазона, причем генерирование диаграммы направленности содержит генерирование направленного выходного сигнала посредством объединения сигналов аудиодиапазона от аудиосенсоров, причем объединение содержит применение весовых коэффициентов к отдельным сигналам аудиодиапазона;
определение весовых коэффициентов в ответ на характеристику присутствия;
отслеживание моделью (607) движения пользователя положения пользователя; и
обновление модели движения пользователя в ответ как на ультразвуковые сигналы, так и на сигналы аудиодиапазона.
| JPH 09238390 A, 09.09.1997 | |||
| US 2008095401 A1, 24.04.2008 | |||
| DE 19943872 A1, 15.03.2001 | |||
| RU 2006139068 A, 20.05.2008. |

