Область техники, к которой относится изобретение
Изобретение относится к области медицины, физиологии человека, физической культуре и спорту, а более конкретно, к средствам медицинского диагностического исследования интегральной оценки гибкости позвоночника, подвижности тазобедренных суставов, эластичности мышц задней поверхности бедра и голени в тесте с наклоном туловища вперед и вниз из исходного положения сидя с выпрямленными ногами, и может быть использовано при массовом мониторинге физического состояния, резервов здоровья и работоспособности детей, подростков и взрослого населения.
Уровень техники
Известны различные устройства для измерения и оценки интегральной гибкости позвоночника, подвижности суставов и эластичности мышц задней поверхности бедра и голени, определяемые по результатам выполнения теста с наклоном вперед и вниз из исходных положений сидя и стоя ([1] SU 150577 А1, Васильев Е.П., опубл. 22.11.1962; [2] US 5935087 A, University of Tokyo, опубл. 10.08.1999; [3] SU 1505503 А1, Нидерштрат Б.М., 07.09.1989; [4] US 3925901 А, James В. Mccormick, 16.12.1975; [5] RU 2015682 C1, НИИ физической культуры, 15.07.1994).
К недостаткам известных аналогов следует отнести отсутствие в них элементов, обеспечивающих стандартизацию позы обследуемого при тестировании, а именно, положения стоп и рук при упоре и/или перемещении измерительного приспособления.
Наиболее близким аналогом по технической сущности к заявленному изобретению является решение по патенту на полезную модель ([6] RU 143298 U1, ООО «НПП «Навигатор здоровья», опубл. 20.07.2014), в котором раскрыт измерительный модуль и устройство для измерения и оценки гибкости позвоночника, содержащий горизонтально расположенный измерительный модуль, включающий направляющие с разметочными шкалами и пазами, в которых размещены части подвижного измерительного элемента с пальцевым упором, установленным с возможностью перемещения вдоль направляющих, упоры для стоп вертикально установленные с помощью упорной полурамы.
К недостаткам прототипа следует отнести значительное участие человеческого фактора, невозможность автоматизированной обработки и сбора информации, отсутствие стандартизации положения сегментов тела обследуемого в условиях предъявления тестовой нагрузки.
Сущность изобретения
Задача, на которую направлено изобретение, заключается в устранении вышеуказанных недостатков и в автоматизации процедуры получения биометрических данных о текущем состоянии позвоночника, тазобедренных суставов группы мышц задней поверхности бедра и голени в стандартных условия проведения тестирования и последующей обработки и оценки полученных данных для прогностических (диагностических) медицинских и статистических целей, расширение функциональных возможностей в части придания способности работать в качестве измерительного комплекса-модуля в составе интегрального комплекса обследования, работающего в рамках единой управляющей команды сбора и обработки биометрической информации.
Технический результат, достигаемый изобретением, заключается в автоматизации процесса при повышении точности диагностики и расширении функциональных возможностей.
Указанный технический результат достигается за счет того, что устройство для измерения и интегральной оценки гибкости позвоночника, подвижности тазобедренных суставов, эластичности мышц задней поверхности бедра и голени, в тесте с наклоном вперед и вниз из исходного положения сидя с выпрямленными в коленях ногами, содержит корпус, измерительный модуль, включающий подвижный измерительный элемент с пальцевым упором, установленный в направляющих с возможностью перемещения в передне-заднем направлении, упоры для вертикальной установки стоп испытуемого в вертикальном положении, при этом корпус устройства выполнен из горизонтального монорельсового профиля, установленного на опорных элементах, между вертикальными упорами стоп, которые закреплены на опорных элементах, на боковых сторонах профиля расположены роликовые направляющие, в которых расположены роликовые опоры опорного сидения с фиксатором выбранного положения и роликовые опоры передвижной каретки с роликовыми подколенными упорами, между упорами для стоп на монорельсовом профиле установлен измерительный модуль, содержащий программируемый электронно-механический зубоременный привод движения каретки измерительного элемента и горизонтально укладываемый цепной кабель-канал электрической цепи управления приводом, на корпусе измерительного элемента выполнен пальцевой упор с встроенной контактной кнопкой включения привода перемещения измерительного элемента, причем каретка соединена с измерительным элементом при помощи кронштейнов, при этом в передней части корпуса на кронштейне установлен многофункциональный управляющий блок, содержащий модуль ввода исходных данных обследуемого, включающий встроенную и/или выносную панель персональной регистрации и/или идентификации, модуль обработки и хранения базы данных, модуль контроля и управления, модуль отображения информации (визуализатор), блок передачи данных.
Передвижная каретка с роликовыми подколенными упорами снабжена подколенными датчиками положения ног, выполненные в виде раздельно установленных на подвижной каретке рычажно-поворотных механизмов, снабженных пружиной возврата и датчиками угловых перемещений, электрически связанными с блоком управления.
Модуль идентификации панели персональной регистрации и управления выполнен, например, в виде встроенного блока идентификации, регистрирующей информацию персональной смарт-карты или ее аналога.
Опорная часть подпятников упоров стоп, средняя линия кнопки пальцевого упора расположены на одном уровне с опорной плоскостью сидения, при этом фиксатор сиденья может быть выполнен фрикционным.
Краткое описание чертежей
На Фиг. 1 изображен общий вид комплекса.
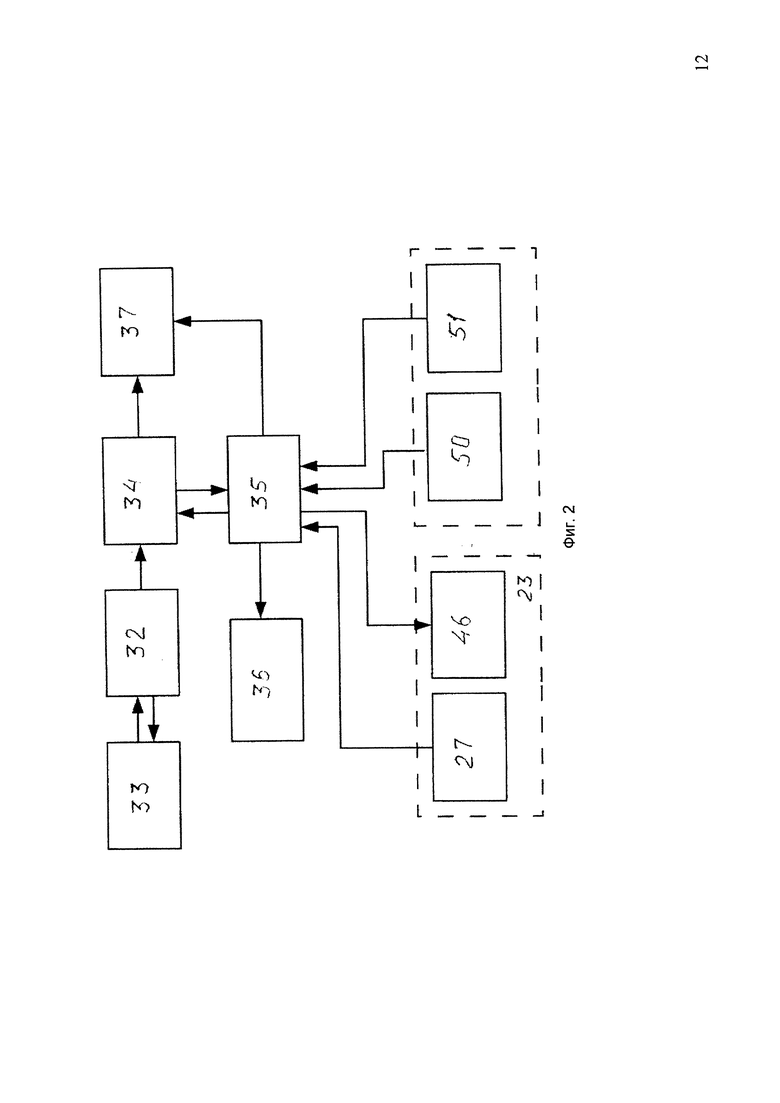
На Фиг. 2 изображена функциональная схема блока управления.
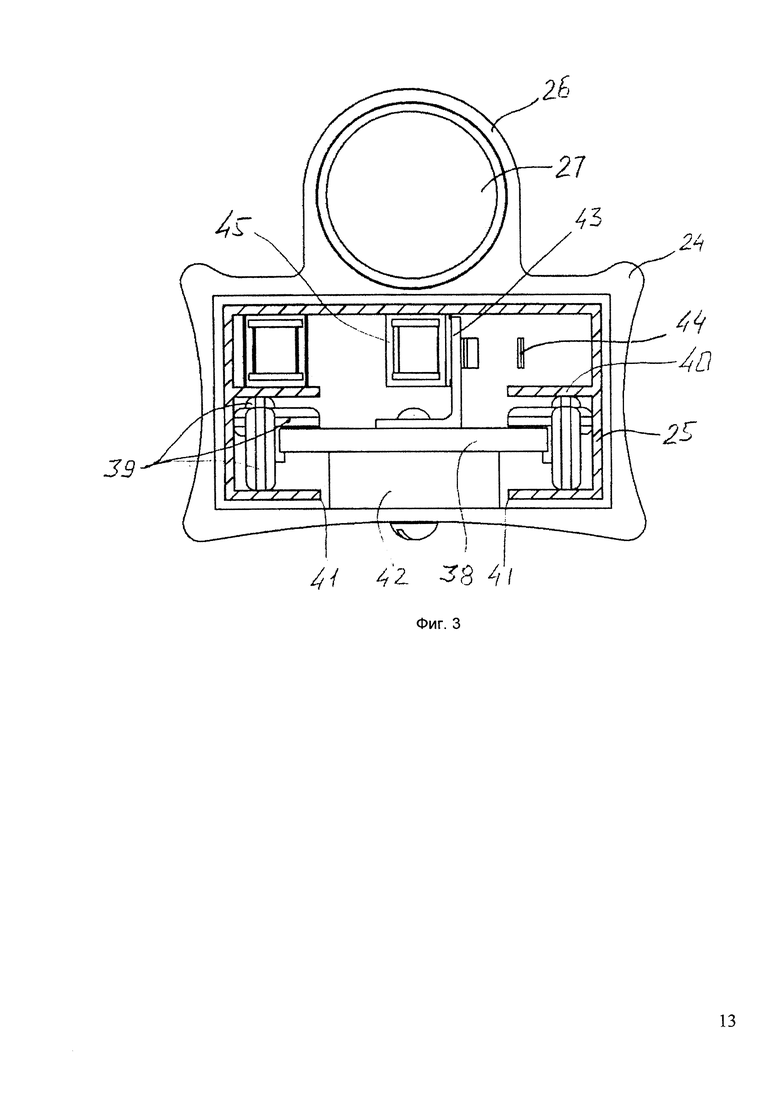
На Фиг. 3 изображен общий вид измерительного элемента, вид спереди с поперечным разрезом направляющей.
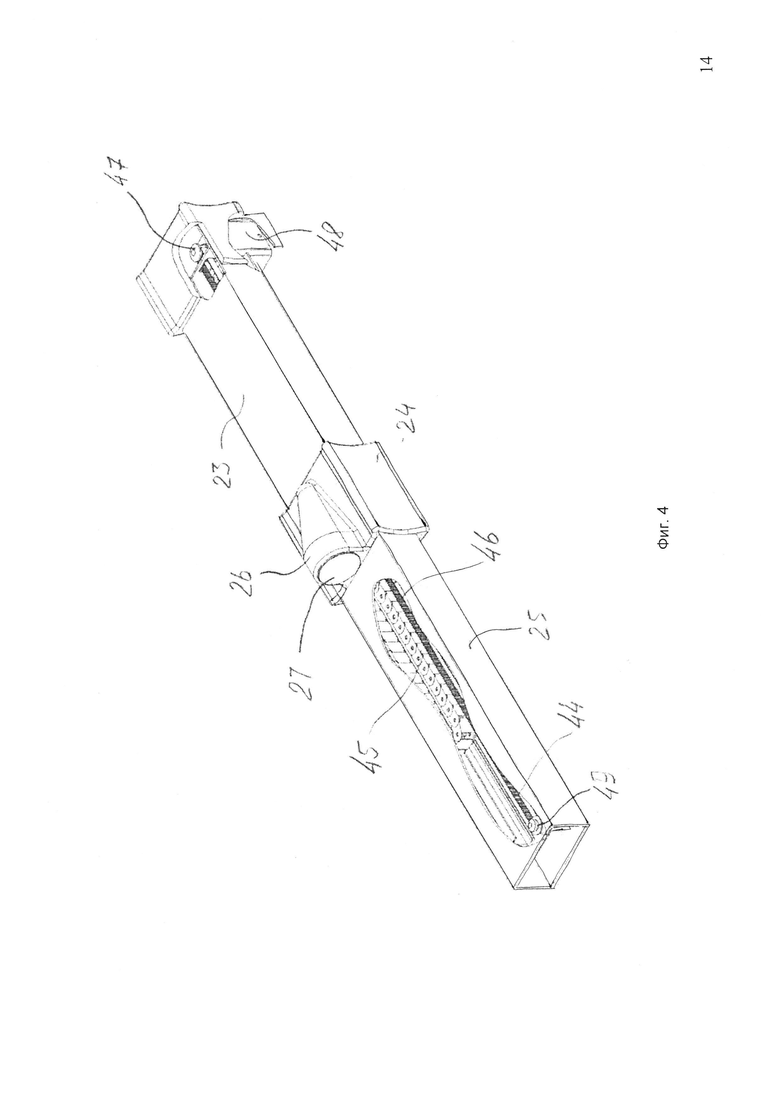
На Фиг. 4 изображен общий вид измерительного модуля.
На Фиг. 5 изображен общий вид подколенных датчиков положения ног.
Раскрытие изобретения
Перечень позиций, указанных на чертежах:
1 - корпус
2, 3, 4 - опорные элементы
5 - монорельсовый профиль
6, 7 - роликовые направляющие
8 - опорное сиденье
9 - ручка фиксатора
10 - роликовые опоры для каретки
11 - каретка
12, 13 - правый и левый роликовый упоры
14, 15 - упоры стоп
16, 17 - стойки для упоров стоп
18, 19 - телескопический откос
20 - кронштейн
21, 22 - подпятник
23 - измерительный модуль
24 - измерительный элемент
25 - направляющая
26 - пальцевой упор
27 - контактная кнопка
28, 29 - передняя и задняя заглушки
30 - кронштейн
31 - управляющий блок
32 - модуль ввода исходных данных
33 - панель персональной регистрации
33а - выносная панель персональной регистрации и/или идентификации
34 - модуль обработки и хранения базы данных
35 - модуль контроля и управления
36 - модуль отображения информации (визуализатор)
37 - блок передачи данных
38 - каретка измерительного модуля
39 - роликовые опоры направляющей
40 - продольные направляющие
41 - продольный паз
42 - кронштейн для соединения каретки и измерительного элемента
43 - кронштейн для соединения каретки и зубчатого ремня
44 - замкнутый зубчатый ремень
45 - гибкий кабель-канал электрической цепи
46 - электронно-механический зубоременный привод
47 - ведущий зубчатый шкив
48 - двигатель
49 - ведомый зубчатый шкив
50, 51 - подколенные датчики контроля
52, 53 - подпружиненные рычажно-поворотные механизмы
Осуществление изобретения
Аппаратно-программный комплекс (см. Фиг. 1) для измерения и интегральной оценки гибкости позвоночника, подвижности тазобедренных суставов, эластичности задней поверхности бедра и голени в тесте с наклоном туловища вперед и вниз из исходного положения сидя с выпрямленными в коленях ногами содержит корпус 1 с опорными элементами 2, 3, 4 и установленного на них горизонтального монорельсового профиля 5 с расположенными на нем с обеих сторон роликовыми направляющими 6 и 7. В задней части на роликовых направляющих установлено с возможностью передвижения в передне-заднем направлении на роликовых опорах (не показаны) опорное сидение 8, фиксируемое в выбранном положении ручкой 9 фиксатора. В средней части профиля 5 в роликовых направляющих 6 и 7 на роликовых опорах 10 установлена каретка 11 с правым и левым роликовыми упорами 12 и 13, которые взаимодействуют с подколенными датчиками контроля положения ног. Датчики контроля регистрируют выполнение обследуемым стандарта удержания выпрямленных в коленях ног при упоре ногами в вертикальные упоры стоп 14 и 15, которые установлены на стойках 16 и 17, и шарнирно закреплены на опоре 3 на одинаковом расстоянии от профиля 5. Вертикальное положение упоров 14 и 15 фиксировано телескопическими откосами 18 и 19, нижние концы которых шарнирно соединенные с кронштейном 20, прикрепленным к нижней поверхности профиля 5. Упоры стоп 14 и 15 выполнены в форме унифицированных ложементов стопы с подпятниками 21 и 22 округлой формы, располагаемыми горизонтально и на одном уровне с плоскостью опорного сидения 8. Между упорами стоп 14 и 15 на профиле 5 установлен измерительный модуль 23. Последний содержит подвижный измерительный элемент 24, который установлен на направляющей 25 с возможностью передвижения вперед-назад, и снабжен пальцевым упором 26 с контактной кнопкой 27, расположенной в горизонтальной плоскости расположения верхней поверхности опорного сидения и подпятников 21 и 22. Торцы направляющей 25 закрыты заглушками 28 и 29, передней и задней.
В передней части корпуса 1 на кронштейне 30 установлен многофункциональный управляющий блок 31, содержащий модуль 32 (фиг. 2) ввода исходных данных обследуемого, включающий встроенную панель 33 или выносную панель 33а персональной регистрации и/или идентификации, модуль 34 обработки и хранения базы данных, модуль 35 контроля и управления, модуль 36 отображения информации (визуализатором), блок 37 связи и передачи данных во внешний интегрирующий сервер (не показан). При этом визуализатор 36, выполняет функцию отображения требований, предъявляемых обследуемому в виде анимации, фактическое их выполнение и результаты тестирования.
Направляющая 25 (Фиг. 3) измерительного модуля 23 выполнена в форме замкнутого прямоугольного профиля. Измерительный элемент 24 конструктивно выполнен таким образом, что он охватывает снаружи со всех сторон направляющую 25, установлен на каретке измерительного модуля 38, размещенной внутри направляющей 25 на комбинированно расположенных в разных плоскостях роликовых опорах 39, установленных внутри прямоугольного профиля, снабженного расположенными во внутренней полости дополнительными продольными направляющими 40 для роликовых опор, обеспечивающих безлюфтовое одноосное движение каретки 38 внутри направляющей 25. С нижней стороны направляющая 25 имеет продольный паз 41, в котором размещены кронштейны 42 для соединения каретки 38 и измерительного элемента 24. Установленный на корпусе каретки 38 кронштейн 43 жестко соединен с замкнутым зубчатым ремнем 44 и подвижным концом гибкого кабель-канала 45 электрической цепи управления программируемого электронно-механического зубоременного привода 46. Ремень 44 установлен с одной стороны на ведущем зубчатом шкиву 47 двигателя 48 привода 46, а с другой на ведомом шкиву 49.
Контактная кнопка 27 (Фиг. 4) измерительного элемента 24 имеет проводное (или беспроводное) соединение с модулем 35 контроля и управления, управляющим приводом 46, двигатель 48 которого обеспечивает перемещения измерительного элемента 24 с произвольно выбираемой постоянной скоростью движения в режиме измерения при нажатии на контактную кнопку 27 пальцевого упора 26 и прекращающим движение при снятия давления с кнопки 27.
Роликовые упоры 12 и 13, соединены с подколенными датчиками 50 и 51 контроля положения ног посредством подпружиненных рычажно-поворотных механизмов 52 и 53 и электрически связанных с модулем 35 контроля и управления управляющего блока 31. Датчики 50 и 51 контроля положения ног могут быть реализованы, например, в виде датчиков угловых перемещений.
Комплекс работает следующим образом.
Обследуемый регистрируется путем кратковременного касания или установки регистрационной смарт-карты на встроенной панели 33 считывающего устройства модуля 32 ввода исходных данных. В случае первичного обследования регистрация также может быть осуществлена путем введения необходимой информации в устройство, расположенное на выносной панели 33а.
После регистрации устройство активируется с выходом на режим тестирования. Обследуемый садится на опорное сидение 8, установленного на ровной горизонтальной поверхности устройства. Располагает полностью выпрямленные ноги горизонтально таким образом, чтобы обе стопы при этом были вертикально установлены в упорах 14 и 15 стоп и плотно прижаты к ним подошвенными частями стоп. В этом положении опорное сидение стопорится фиксатором 9. Подколенные упоры 12 и 13 смещают от своего начального положения около сидения и устанавливают в области подколенных ямок обеих ног. В принятом исходном положение ног обследуемого после фиксации исходного положения показания датчиков 50 и 51 положения ног раздельно регистрируются модулем 35 контроля и управления. После предъявления на экране визуализатора 36 указания о начале выполнения теста обследуемый наклоняется вперед и вниз, одновременно нажимая концами средних пальцев, наложенных одна поверх другой ладоней, выпрямленных в локтях рук, на контактную кнопку 27 пальцевого упора 26 измерительного элемента 24, располагаемого в начальный момент тестирования в крайнем положении, приближенном к испытуемому. Нажатие на контактную кнопку 27 одновременно включает двигатель 48 привода 46, обеспечивающего движение с постоянной скоростью измерительного элемента 24. При этом в соответствии с анимационным изображением эталона выполнения теста и контролируемых параметров позы испытуемый волевым усилием удерживает ноги выпрямленными в коленях и без отрыва стоп от опорной поверхности подколенных упоров 12 и 13 продолжает нажимать на кнопку 27 наклоняясь вперед и вниз одновременно с движением измерительного элемента 24 до достижения последним максимально удаленного положения. При снятии давления с контактной кнопки 27 измерительный элемент останавливается. Достигнутый результат, измеряемый как расстояние от концов совмещенных средних пальцев, наложенных одна поверх другой ладоней, до опорной плоскости упоров стоп, предъявляется на экране визуализатора 36. При правильном выполнении теста обследуемому предъявляется информация «ТЕСТ ПРИНЯТ». Одновременно там же предъявляется бальная оценка результата, рассчитанная с учетом половозрастных моделей, содержащихся в базе данных блока модуля 34 обработки и хранения данных. После чего на экране представляется информация о завершении теста.
В случае неспособности сохранить правильную позу ног, при сгибании коленей предъявляется указатель желтого или красного цвета. Указатель желтого цвета регистрирует сгибание ног обследуемым в области допустимых границ. Указатель красного цвета регистрирует сгибание ног за пределами допустимого. Зафиксированные показания в момент превышения допустимых границ при сгибании ног вносятся в базу данных как достигнутый результат.
Вышеперечисленное доказывает причинно-следственную связь между существенными признаками заявленного изобретения и техническим результатом. При выполнении теста, за положением обследуемого следят подколенные датчики положения ног и все связанные с ним элементы; за выполнение теста отвечает измерительный модуль и все связанные с ним элементы; за управлением, хранением, обработкой, контролем, передачей данных обследуемого следит управляющий блок и все связанные с ним элементы, за счет чего отпадает участие человеческого фактора (ошибка, невнимательность врача) и, следовательно, повышение точности диагностики при оценки гибкости позвоночника, подвижности тазобедренных суставов, эластичности мышц задней поверхности бедра и голени в тесте с наклоном вперед и вниз из исходного положения сидя с выпрямленными в коленях ногами. Автоматизация процесса диагностики достигается за счет использования управляющего блока, который следит за всем процессом в целом и может быть использован как один из модулей в части придания способности работать в качестве измерительного комплекса-модуля в составе интегрального комплекса обследования, работающего в рамках единой управляющей команды сбора и обработки биометрической информации, что соответственно, расширяет функциональные возможности.
При автоматизации процесса возникает соответствующее повышение точности диагностики (за счет исключения человеческого фактора) и расширяются функциональные возможности (за счет использования разных автоматических систем управления).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ восстановления объема движений в голеностопном суставе у детей с мышечной дистрофией Дюшенна | 2021 |
|
RU2774037C1 |
| КРЕСЛО "ЗДОРОВЬЕ" | 1999 |
|
RU2159568C1 |
| ОРТОПЕДИЧЕСКИЙ СТУЛ | 2012 |
|
RU2497427C1 |
| ОРТОПЕДИЧЕСКОЕ УСТРОЙСТВО | 2019 |
|
RU2697769C1 |
| Способ нормализации мышечного тонуса у детей раннего возраста с последствиями перинатального поражения ЦНС | 2021 |
|
RU2774832C1 |
| Способ снижения повышенного мышечного тонуса при последствиях перинатального поражения ЦНС | 2016 |
|
RU2615869C1 |
| СПОСОБ ПРЕДОПЕРАЦИОННОГО ПЛАНИРОВАНИЯ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ У ПАЦИЕНТОВ С СОЧЕТАННОЙ ПАТОЛОГИЕЙ ТАЗОБЕДРЕННЫХ, КОЛЕННЫХ СУСТАВОВ И ПОЯСНИЧНОГО ОТДЕЛА ПОЗВОНОЧНИКА | 2017 |
|
RU2651056C1 |
| СПОСОБ МИОДИНАМИЧЕСКОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА (ВАРИАНТЫ) | 2012 |
|
RU2508921C1 |
| ТРЕНАЖЕР ОРТОПЕДИЧЕСКИЙ "ЛОТОС" И СПОСОБ КОРРЕКЦИИ ПАТОЛОГИЧЕСКИХ ИЗМЕНЕНИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА ПАЦИЕНТА С ЕГО ПОМОЩЬЮ | 2006 |
|
RU2307640C1 |
| Рабочее кресло | 1990 |
|
SU1734679A1 |


Изобретение относится к области медицины, физиологии человека, физической культуре и спорту, а более конкретно к средствам медицинского диагностического исследования интегральной оценки гибкости позвоночника, подвижности тазобедренных суставов, эластичности мышц задней поверхности бедра и голени в тесте с наклоном туловища вперед и вниз из исходного положения сидя с выпрямленными ногами, и может быть использовано при массовом мониторинге физического состояния, резервов здоровья и работоспособности детей, подростков и взрослого населения. Аппаратно-программный комплекс для измерения и интегральной оценки гибкости позвоночника, подвижности тазобедренных суставов, эластичности мышц задней поверхности бедра и голени в тесте с наклоном вперед и вниз из исходного положения сидя с выпрямленными в коленях ногами содержит корпус, измерительный модуль, включающий подвижный измерительный элемент с пальцевым упором, установленный в направляющих с возможностью перемещения в передне-заднем направлении, упоры для вертикальной установки стоп испытуемого в вертикальном положении. Корпус выполнен из горизонтального монорельсового профиля, установленного на опорных элементах, между вертикальными упорами стоп, которые закреплены на опорных элементах. На боковых сторонах профиля расположены роликовые направляющие, в которых расположены роликовые опоры опорного сидения с фиксатором выбранного положения и роликовые опоры передвижной каретки с роликовыми подколенными упорами. Между упорами для стоп на монорельсовом профиле установлен измерительный модуль, содержащий программируемый электронно-механический зубоременный привод движения каретки измерительного элемента и горизонтально уложенный цепной кабель-канал электрической цепи управления приводом. На корпусе измерительного элемента выполнен пальцевой упор с встроенной контактной кнопкой включения привода перемещения измерительного элемента. Каретка соединена с измерительным элементом при помощи кронштейнов. В передней части корпуса на кронштейне установлен многофункциональный управляющий блок, содержащий модуль ввода исходных данных обследуемого, включающий встроенную и/или выносную панель персональной регистрации и/или идентификации, модуль обработки и хранения базы данных, модуль контроля и управления, модуль отображения информации (визуализатор), блок передачи данных. Изобретение позволяет автоматизировать процесс при повышении точности диагностики и расширении функциональных возможностей. 3 з.п. ф-лы, 5 ил.
1. Аппаратно-программный комплекс для измерения и интегральной оценки гибкости позвоночника, подвижности тазобедренных суставов, эластичности мышц задней поверхности бедра и голени в тесте с наклоном вперед и вниз из исходного положения сидя с выпрямленными в коленях ногами, содержащий корпус, измерительный модуль, включающий подвижный измерительный элемент с пальцевым упором, установленный в направляющих с возможностью перемещения в передне-заднем направлении, упоры для вертикальной установки стоп испытуемого в вертикальном положении, отличающийся тем, что корпус выполнен из горизонтального монорельсового профиля, установленного на опорных элементах между вертикальными упорами стоп, которые закреплены на опорных элементах, на боковых сторонах профиля расположены роликовые направляющие, в которых расположены роликовые опоры опорного сидения с фиксатором выбранного положения и роликовые опоры передвижной каретки с роликовыми подколенными упорами, между упорами для стоп на монорельсовом профиле установлен измерительный модуль, содержащий программируемый электронно-механический зубоременный привод движения каретки измерительного элемента и горизонтально уложенный цепной кабель-канал электрической цепи управления приводом, на корпусе измерительного элемента выполнен пальцевой упор с встроенной контактной кнопкой включения привода перемещения измерительного элемента, причем каретка соединена с измерительным элементом при помощи кронштейнов, при этом в передней части корпуса на кронштейне установлен многофункциональный управляющий блок, содержащий модуль ввода исходных данных обследуемого, включающий встроенную и/или выносную панель персональной регистрации и/или идентификации, модуль обработки и хранения базы данных, модуль контроля и управления, модуль отображения информации (визуализатор), блок передачи данных.
2. Комплекс по п. 1, отличающийся тем, что передвижная каретка с роликовыми подколенными упорами снабжена подколенными датчиками положения ног, выполненными в виде раздельно установленных на подвижной каретке рычажно-поворотных механизмов, снабженных пружиной возврата и датчиком угловых перемещений, электрически связанным с блоком управления.
3. Комплекс по п. 1, отличающийся тем, что модуль идентификации панели персональной регистрации и управления выполнен, например, в виде блока персональной идентификации, регистрирующей информацию персональной смарт-карты или ее аналога.
4. Комплекс по п. 1, отличающийся тем, что опорная часть подпятников упоров стоп, средняя линия контактной кнопки пальцевого упора расположены на одном уровне с опорной плоскостью сидения, при этом фиксатор сиденья может быть выполнен фрикционным.
| Коррекционное устройство для нарезания глобоидных передач | 1960 |
|
SU143298A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2523346C2 |
| Способ лечения нейрогенной хронической тазовой боли | 2021 |
|
RU2766778C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ АНАТОМИЧЕСКОГО ЗУБНОГО ИМПЛАНТА | 2016 |
|
RU2697587C1 |
| WO2009027636 A1, 05.03.2009 | |||
| US5935087 A, 10.08.1999. | |||

