Данное изобретение относится к ингалятору, в частности к капсульному ингалятору.
Существует много известных типов ингаляторов, с помощью которых пользователь может вдыхать для приема содержащегося в них лекарственного препарата. Некоторые ингаляторы содержат многократные дозы лекарственного препарата, доступ к которым пользователь может получить последовательно, тогда как другие являются капсульными и требуют от пользователя помещения, по меньшей мере, одной капсулы внутрь устройства для каждой доставки лекарственного препарата. Может быть затруднительно точно контролировать, каким образом пользователь применяет устройство, когда не находится под непосредственным наблюдением, поскольку некоторые пользователи не следят внимательно за его использованием. Это может привести к недостаточному соблюдению лечебного режима, что не является очевидным для лечащего врача, поэтому причина сохраняющихся симптомов не ясна. Были предложены дозаторы, чтобы пользователь или третье лицо имели возможность проверять количество доз, принятых пользователем, но это необязательно в точности соответствует количеству правильных доз, принятых пользователем на самом деле. Например, капсулы могут быть вынуты из дозатора, но так и не помещены в ингалятор, или помещены в ингалятор, но лекарственное средство не принято по той или иной причине.
Настоящее изобретение предоставляет ингалятор, содержащий вместилище для капсулы для вмещения капсулы с лекарственным средством, канал для воздушного потока, по которому воздух проходит во время события воздушного потока от, по меньшей мере, одного впускного отверстия для воздуха к выпускному отверстию, причем канал для воздушного потока проходит через вместилище для капсулы, первый датчик, процессор и источник питания для питания указанного процессора, причем вместилище для капсулы определяется, по меньшей мере, одной стенкой и выполнен с такой возможностью, что, когда капсула располагается во вместилище для капсулы и достаточное количество воздуха протекает по каналу для воздушного потока через вместилище для капсулы, указанная капсула двигается внутри вместилища для капсулы, причем первый датчик расположен на ингаляторе таким образом, что он способен обнаруживать движение капсулы внутри вместилища для капсулы и формировать первый сигнал, указывающий на упомянутое движение, причем процессор получает указанный первый сигнал от датчика и использует данный первый сигнал для определения того, указывает ли первый сигнал на присутствие, или отсутствие, капсулы во вместилище для капсулы во время события воздушного потока, и для формирования сигнала капсулы, указывающего на это.
Данный ингалятор предназначен для того, чтобы обеспечить возможность доставки лекарственного препарата из капсулы в дыхательные пути, например легкое, пациента. Лекарственный препарат может представлять собой сухой порошок, жидкость или подходящую лекарственную форму и может включать в себя один или несколько активных компонентов для лечения одного или нескольких болезненных состояний. Лекарственный препарат может включать в себя один или несколько неактивных компонентов, которые могут использоваться для стабилизации, увеличения объема или другого изменения одной или нескольких характеристик состава. Лекарственный препарат может не содержать ни одного активного компонента, например, данный лекарственный препарат может являться плацебо.
Канал для воздушного потока включает в себя впускное отверстие для проникновения воздуха внутрь канала для воздушного потока. Термин «воздух» следует понимать как включающий в себя любой подходящий газ, например газ, который может быть подан пациенту и который может не иметь состав, идентичный воздуху, например газ, обогащенный кислородом. Выпускное отверстие из канала для воздушного потока может представлять собой насадку для рта или носа, через которую пользователь вдыхает с целью получения лекарственного препарата из капсулы.
Событие воздушного потока - это когда воздух проходит через канал для воздушного потока. Оно может вызываться вдыханием пользователя через ингалятор, например вдыхание через насадку для рта или носа, либо может быть вызвано источником давления, вызывающего протекание воздуха, или другого газа, через канал для воздушного потока от впускного отверстия к выпускному и внутрь пользователя. В основном, величина воздушного потока через ингалятор будет находиться в пределах от 15 и 150 литров в минуту.
Процессор может быть электронным, например, он может содержать одну или несколько аналоговых или цифровых интегральных схем, схем на дискретных компонентах или программируемых цифровых процессоров. Процессор может требовать источник питания, например источник электроэнергии, для работы. Датчик может быть электронным и может также требовать источник электроэнергии для работы либо это может быть пассивный датчик.
Сигналы, формируемые датчиком и/или процессором, могут быть электромагнитными и могут представлять собой сигналы, изменяющиеся во времени, например колебательный сигнал, либо могут быть электронными сигналами типа «включено/выключено» или «низкий/высокий уровень сигнала», либо сигналами любой другой подходящей формы.
Указанный датчик может быть датчиком любого подходящего типа, выполненным с возможностью формировать сигнал, который можно обрабатывать с целью предоставления определения того, присутствует ли капсула в ингаляторе. Например, оптический датчик может быть расположен для контроля вместилища для капсулы, а сигнал от указанного датчика может обрабатываться с целью определения, указывает ли сигнал на движение капсулы внутри вместилища для капсулы. Предполагается, что базовый алгоритм и способ проб и ошибок могут выработать подходящий способ обработки такого сигнала.
В одном варианте осуществления ингалятор содержит первый датчик, который является датчиком удара, и первый сигнал является сигналом удара. Вместилище для капсулы определяется, по меньшей мере, одной стенкой и выполнено с такой возможностью, что при движении капсулы внутри вместилища для капсулы, капсула многократно ударяется о, по меньшей мере, одну стенку. Датчик удара расположен на ингаляторе таким образом, чтобы иметь возможность обнаруживать удары капсулы о стенку вместилища для капсулы и формировать сигнал удара, указывающий на каждый удар.
Первый датчик расположен на ингаляторе таким образом, чтобы иметь возможность обнаруживать движение капсулы внутри вместилища для капсулы. Он может обнаружить указанное движение непосредственно, например, оптический датчик, который визуально контролирует движение капсулы. В альтернативном варианте осуществления датчик может обнаруживать движение опосредованно путем измерения параметра, который может быть проанализирован с целью определения наличия или отсутствия характеристики, связанной с движением капсулы, например удары капсулы о стенку либо изменение в структуре воздушного потока, при движении капсулы сквозь впускное или выпускное отверстия для воздуха.
Преимущество датчика удара перед, например, оптическим датчиком состоит в том, что не требуется размещать ни одну деталь датчика удара в канале для воздушного потока, что может упростить структуру канала для воздушного потока и облегчить модификацию такого датчика для конструкции существующих ингаляторов. Для оптического датчика нужно было бы, по меньшей мере, одно окно в канале для воздушного потока, через которое он сможет «смотреть» внутрь вместилища для капсулы и формировать сигнал, с тем чтобы ингалятор мог обработать этот сигнал для обнаружения там капсулы. Датчик удара может представлять собой любой подходящий датчик, например датчик давления, микрофон или пьезоэлемент.
В одном варианте осуществления датчик является микрофоном, расположенным в ингаляторе в месте, где удары капсулы о стенку вместилища для капсулы могут быть «слышны» или «ощутимы» датчиком. Выходные сигналы от датчиков нескольких типов могут быть объединены для выработки надлежащего импульсного сигнала. Также следует отметить, что капсула может быть модифицирована, чтобы сделать ее более легко поддающейся обнаружению датчиком, например, капсула может включать в себя металлическую или магнитную деталь, которая может быть обнаружена соответствующим датчиком. В другом варианте осуществления датчик является пьезоэлементом, расположенным в ингаляторе в месте, где удары капсулы о стенку вместилища для капсулы могут быть «слышны» или «ощутимы» датчиком.
Ингалятор может дополнительно включать в себя запоминающее устройство для хранения сигнала капсулы для одного или нескольких событий воздушного потока для дальнейшего извлечения. Это может быть запоминающее устройство в любой подходящей форме, которое может быть стираемым или постоянным. Например, указанное запоминающее устройство может быть электронно читаемым, и/или записываемым, и/или перезаписываемым и может включать в себя флэш-память, оперативную память (ОЗУ), электрически перепрограммируемую постоянную память (ЭППЗУ). Указанное запоминающее устройство также может записывать первый сигнал, данные о времени, в которое данный сигнал был сформирован, и любые другие данные. Ингалятор может содержать дополнительные датчики, которые предоставят пользователю или лечащему врачу данные для использования, и такие данные могли бы храниться в запоминающем устройстве для дальнейшего извлечения. Указанные данные могут быть соотнесены с конкретными событиями воздушного потока.
Ингалятор дополнительно может содержать устройство вывода, которое может обеспечить внешнему устройству, такому как компьютер, доступ к сигналу капсулы и/или содержимому запоминающего устройства. Указанное устройство вывода может включать в себя разъем, в который может быть включен кабель связи. Дополнительно, или в качестве альтернативы, устройство вывода может включать в себя генератор сигнала для формирования и передачи радиосигнала, который может быть получен внешним приемником. Устройство вывода может представлять собой радиопередатчик, например WiFi™ передатчик.
Процессор может анализировать первый сигнал с использованием одного или нескольких различных алгоритмов. Процессор может анализировать первый сигнал от датчика с помощью алгоритма нахождения пиков и определять, находится ли расчетная частота пиков в пределах предварительно определенных границ, для выработки сигнала капсулы. Данные границы будут определены на основе характерной частоты вращающейся капсулы при ожидаемых величинах расхода газа в пределах геометрии ингалятора. Во время события воздушного потока обнаружено, что частота, с которой капсула ударяет о стенку вместилища для капсулы, является по существу постоянной и, следовательно, могут быть сформированы соответствующие границы. Алгоритм нахождения пиков используется с целью сокращения влияния шумов на обнаружение событий ударов, а вычислительная сложность относительно низка.
Процессор может анализировать сигнал удара от датчика с использованием алгоритма селектора в частотной области и определять, находится ли отношение интенсивности сигнала между двумя различными предварительно заданными диапазонами частот в пределах предварительно заданных границ, для выработки сигнала капсулы. Во время события воздушного потока обнаружено, что сигналы ударов различаются в конкретных диапазонах частот между сигналами с присутствующей капсулой и сигналами без капсулы. Сравнение отношения интенсивности сигнала между двумя различными заданными диапазонами частот снижает влияние шума.
Процессор может анализировать сигнал удара от датчика с использованием алгоритма статистики двух переменных, который вычисляет две статистические переменные для характеристики сигнала, и определяет, попадают ли расчетные статистические меры в заданную область на диаграмме разброса данных одной переменной относительно другой, для выработки сигнала капсулы.
Путем выполнения статистического анализа для вычисления статистических переменных, с тем чтобы охарактеризовать сигнал удара, было обнаружено, что по некоторым мерам сигналы удара различаются для сигналов с присутствующей капсулой и для сигналов без капсулы.
Эксцесс является потенциально полезной переменной для данной цели. На диаграмме вероятности относительно конкретной переменной (х), если переменная (х) есть гауссова переменная, то К=0. Если, однако, К>0, хвосты кривых распределения более утяжелены за счет центрального пика. И наоборот, если К<0, то распределение имеет более тонкие хвосты и более тяжелую, более широкую вершину. К является, следовательно, двунаправленной мерой негауссовости.
Эксцесс (К) может применяться для обнаружения импульсных помех из-за столкновений капсул, поскольку данные события, как правило, выталкивают хвосты выборочного распределения достаточно предсказуемым образом, делая результат несомненно негауссовским. Шум вдоха сам по себе является очень гауссовским. Однако фоновый шум, когда вдыхание через ингалятор не производится, имеет очень низкую мощность (и, следовательно, сравнительно низкую дисперсию случайной величины (σ2)) и может иметь чрезвычайно высокий эксцесс, поскольку даже очень малые импульсные помехи могут иметь соразмерно большое влияние на хвосты сигналов. Это дает два типа сигналов, требующих различения:
- Шум вдоха, капсула отсутствует (низкий К, низкий до среднего σ2)
- Шум вдоха, капсула присутствует (средний К, низкий до высокого σ2)
Может быть использовано отношение пикового значения к среднему значению либо самого сигнала, либо квадрата величины сигнала, поскольку бескапсульный сигнал, как правило, имеет меньшее количество высоких пиков (событий ударов) и поэтому более низкое отношение пикового значения к среднему значению.
Расчетными переменными могут быть эксцесс и дисперсия, либо это может быть отношение пикового значения к среднему значению квадрата, или амплитуды, сигнала удара и дисперсия.
Для всех данных алгоритмов пределы, которые могут использоваться для классификации сигналов по типам «капсула присутствует» и «капсула не присутствует», будут меняться от одного типа ингалятора к другому типу и могут быть определены с помощью простых способов проб и ошибок. Вероятно, изменения для ингаляторов одного и того же типа будут минимальными, и поэтому данные пределы можно легко вычислить для какого-либо типа ингалятора.
Вместилище для капсулы может иметь любую подходящую форму, в пределах которой капсула может двигаться в достаточной мере, чтобы позволить датчику выработать соответствующие сигналы. Вместилище для капсулы может давать возможность капсуле двигаться одним или несколькими из следующих способов, возвратно-поступательно в продольном направлении, радиально или вращательно, либо с полным поворотом, либо на ограниченную величину угла. Вместилище для капсулы может включать в себя участок, который имеет, по существу, цилиндрическую форму с диаметром больше длины капсулы, которая должна помещаться внутрь него, и высотой больше диаметра капсулы, но меньше длины капсулы, и канал для воздушного потока выполнен с возможностью заставлять капсулу вращаться внутри вместилища для капсулы. Такая конструкция дает возможность капсуле вращаться вокруг оси, которая проходит, по существу, по ее диаметру. Данное вращение может дополнять вибрацию, по существу, случайного характера, создаваемую воздушным потоком вокруг других осей.
Ингалятор может включать в себя, по меньшей мере, один привод, который может быть приведен в действие пользователем, для того чтобы открывающий элемент открыл капсулу внутри ингалятора. Ингалятор может дополнительно содержать датчик привода для восприятия запуска привода и формирования сигнала запуска. Процессор может быть выполнен с возможностью приема сигнала запуска. Привод может представлять собой кнопку, соединенную с открывающим элементом, например прокалывающим элементом или режущим лезвием, который выполнен с возможностью образования отверстия в капсуле для доступа к лекарственному препарату, содержащемуся внутри нее. Может быть два привода, каждый из которых имеет соотнесенный с ним открывающий элемент, так что в капсуле могут быть созданы два отверстия. Датчики привода могут являться нажимными кнопочными выключателями. Каждый привод может быть соотнесен с датчиком привода, но это необязательно. Датчики привода могут использоваться для «пробуждения» (возврата в рабочий режим) остальной электроники, поскольку нажатие кнопок должно выполняться пользователем прямо перед вдыханием через устройство.
Процессор может быть выполнен с возможностью формирования сигнала дозы, указывающего на то, следовал ли пользователь правильному порядку использования ингалятора. Процессор может формировать указанный сигнал дозы на основе сигнала капсулы и сигнала запуска, а также порядка, в котором данные сигналы были сформированы, и времени между данными сигналами.
В любом из данных примеров к сигналу от датчика или от каждого из датчиков могут применяться один или несколько фильтров, перед тем как будут использованы один или несколько алгоритмов. Указанные фильтры могут включать в себя один или несколько фильтров верхних частот, фильтров нижних частот, шумоподавляющих фильтров или любых других подходящих фильтров.
Ингалятор может быть, по существу, аналогичным или, по существу, идентичным капсульному ингалятору, который описывается в WO 2005/113042.
Следует учитывать, что во всем данном описании и в нижеследующей Формуле изобретения, если контекст не предполагает иное, слово «содержать» или его варианты, такие как «содержит» или «содержащий», подразумевают включение указанного целого числа или этапа либо группы целых чисел или этапов.
Далее будет описываться данное изобретение, только в качестве примера, со ссылкой на следующие чертежи, на которых:
фиг.1 изображает ингалятор;
фиг.2 изображает диаграмму разброса эксцесса в зависимости от дисперсии;
фиг.3 изображает диаграмму разброса отношения пикового значения к среднему значению в зависимости от дисперсии;
фиг.4 изображает график одного примера анализа селектора в частотной области;
фиг.5а и 5b изображают график, изображающий пример анализа удержания пикового значения;
фиг.6 изображает пример электронного аппаратного обеспечения на основе цифровой обработки данных; и
фиг.7 изображает пример алгоритма обработки сигналов.
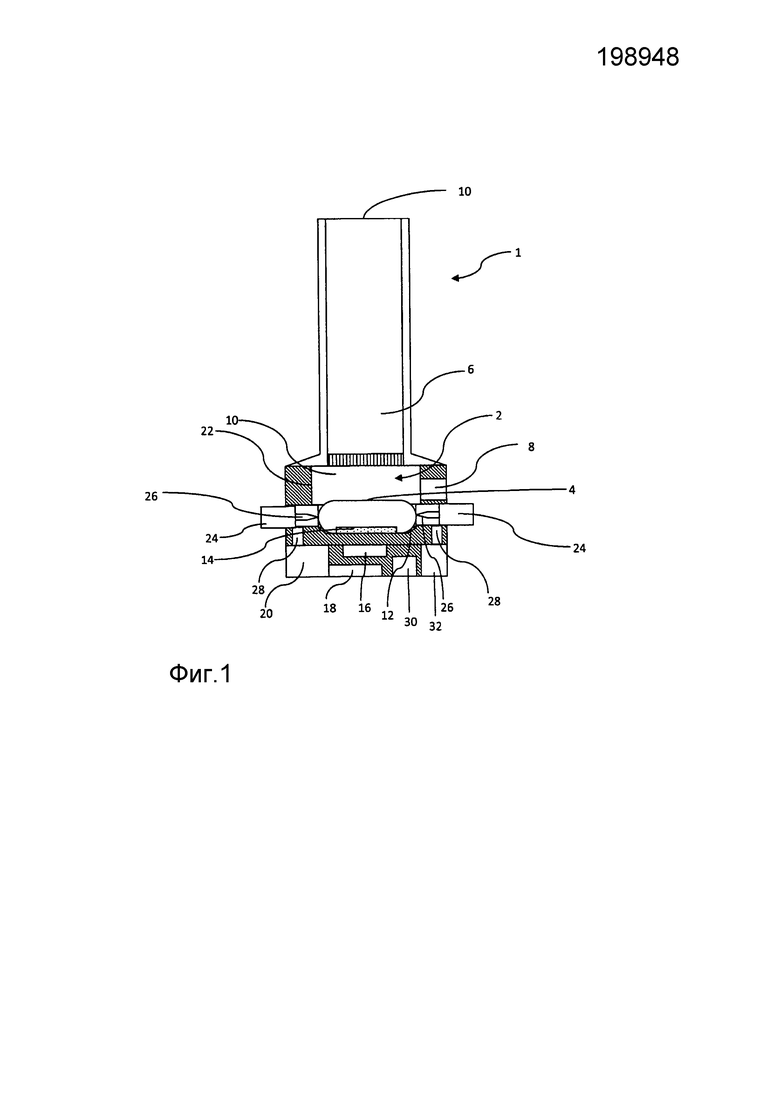
На фиг.1 изображен ингалятор 1, который включает в себя вместилище 2 для капсулы, содержащий капсулу 4 с лекарственным препаратом. Ингалятор 1 содержит канал 6 для воздушного потока, по которому воздух проходит во время события воздушного потока. Канал 6 для воздушного потока отходит от, по меньшей мере, одного впускного отверстия 8 для воздуха к выпускному отверстию 10 и проходит через вместилище 2 для капсулы. Впускное отверстие 8 вводится во вместилище 2 для капсулы в стороне от центральной оси. В данном примере верхняя часть 10 вместилища 2 для капсулы является, по существу, цилиндрической и впускное отверстие 8 для воздуха расположено, по существу, по касательной к вместилищу 2 для капсулы, для того чтобы способствовать завихрению воздуха внутри вместилища 2 для капсулы. Верхняя часть 10 вместилища 2 для капсулы имеет, по существу, цилиндрическую форму с диаметром больше, чем содержащаяся внутри капсула 4, и высотой больше, чем диаметр капсулы, но меньше, чем длина капсулы 4. Вместилище 2 для капсулы включает в себя нижнюю часть 12, или контейнер, в которую изначально помещают капсулу 4. Капсула 4 содержит лекарственную форму 14 препарата в виде сухого порошка.
Ингалятор 1 дополнительно содержит датчик 16, в данном случае микрофон, прилегающий к нижней части 12 вместилища 2 для капсулы. Датчик 16 соединен с процессором 18, который приводится в действие с помощью источника 20 питания, в данном случае батареи.
Вместилище 2 для капсулы определяется, по меньшей мере, одной стенкой 22 и выполнено таким образом, что, когда капсула 4 находится во вместилище 2 для капсулы и достаточно воздуха проходит по каналу 6 для воздушного потока, капсула 4 втягивается внутрь верхней части 10 вместилища 2 для капсулы и вращается в воздушном потоке. В силу того, что капсула 4 вращается, она производит многократные удары о стенку 22, а датчик 16 расположен таким образом, чтобы иметь возможность обнаруживать данные удары в пределах вместилища 2 для капсулы. Датчик 16 формирует сигнал, указывающий на данные удары. Процессор 18 получает указанный сигнал от датчика 16.
Ингалятор 1 также включает в себя пару кнопок 24 привода, которые соединены с прокалывающими элементами 26. Кнопки 24 могут нажиматься пользователем, чтобы побудить прокалывающие элементы 26 проколоть отверстия в концах капсулы 4, находящейся в нижней части 12 вместилища 2 для капсулы. Имеются датчики 28 запуска, которые могут формировать сигналы запуска, указывающие на то, нажата или нет кнопка 24 привода.
Процессор 18 принимает сигналы от датчиков 16, 28 и вырабатывает выходной сигнал, который может указывать на одно или несколько из: наличия капсулы во время события воздушного потока, нажатия кнопок 24 привода, правильного использования ингалятора (верная последовательность и время запуска и присутствие капсулы во время события воздушного потока). Выходной сигнал процессора 18 и/или необработанный выходной сигнал датчиков сохраняются в запоминающем устройстве 30, доступ к которому обеспечивается с помощью устройства 32 вывода, в данном случае беспроводного передатчика.
Следует учитывать, что в случае использования микрофонного датчика значительное количество шумовых сигналов может быть обнаружено в дополнение к обнаружению требуемых событий ударов. Шум может быть внешним либо вызван воздушным потоком через ингалятор. Шум может значительно меняться по уровню громкости и типу, так что требуется некий способ отличать сигнал, указывающий на удар, от сигнала, который не указывает на такие удары.
Для того чтобы применять устройство правильно, пользователю необходимо загрузить капсулу внутрь ингалятора, нажать кнопки для прокалывания капсулы и затем вдыхать посредством устройства так, чтобы капсула встряхивалась и вращалась в воздушном потоке таким образом, чтобы порошкообразный лекарственный препарат внутри нее высвобождался из капсулы и вовлекался в воздушный поток, попадающий в организм пациента.
Электроника ингалятора может работать следующим образом:
1. Пользователь нажимает кнопки, и процессор принимает сигналы запуска.
2. Процессор начинает выборку данных от первого датчика в течение предварительно определенного периода времени. Данные обрабатываются в режиме реального времени в соответствии с одним или несколькими алгоритмами, описываемыми в данном документе. Промежуточные данные сохраняются.
3. Промежуточные данные проверяются на достоверность. Данные от многократных подходов сравниваются, если необходимо.
4. Результаты сохраняются для дальнейшей передачи данных.
Ниже описываются некоторые примеры того, каким образом процессор может обрабатывать импульсный сигнал.
Способ обнаружить импульс в сигнале от ингалятора при загруженной капсуле состоит в сравнении данного сигнала с определенным порогом. Например, для величин расхода вдыхаемого воздуха от низких до средних, удары капсулы могут быть установлены в сигнале путем приложения порогового значения и предположения, что каждое превышение данного порогового значения было вызвано ударом капсулы. Если во время обработки сигнала обнаруживается достаточное количество ударов, то сигнал может быть определен как указывающий на присутствие капсулы. Количество ударов зависит от частоты вращения капсулы, которая зависит от конструкции ингалятора и нуждается в калибровке для каждого типа ингаляторов.
Другой способ анализа сигнала от датчика представляет собой статистический подход, в котором вычисляются статистические переменные для характеристики сигнала.
Капсула внутри ингалятора производит хорошо различимый стук с высокими максимумами сигнала на низкой частоте. Это создает различимое амплитудное распределение в сигнале.
Для этого анализа сигнал сначала пропускается через фильтр верхних частот (ФВЧ) с z-преобразованием согласно выражению (1)
H(z)=



Это имеет двойной эффект: (i) сокращение низкочастотного шумового сигнала и любого смещения постоянной составляющей и (ii) усиление высокочастотного шумового сигнала и коллизионных импульсных помех капсулы.
Затем выполняется алгоритм скользящего окна применительно к N отсчетам данных (как правило, N=2048), пересылая N отсчетов за один раз в целях экономии. В каждом окне вычисляются эксцесс К и дисперсия σ2 с использованием выражений (2) и (3). Скользящее окно, которое имеет максимальную мощность (эмпирически соотносимую с максимальной «информацией» за цикл использования), формирует требуемый (К, σ2) выходной сигнал детектора. Поскольку предполагается, что данные после ФВЧ представляют собой нулевое среднее, суммирования могут быть выполнены мгновенно без прогнозирования среднего значения.
 при
при 


 при
при

Как описывалось выше, эксцесс является, таким образом, двунаправленной мерой негауссовости. Если случайная переменная х есть гауссова переменная, тогда К=0. Если, однако, К>0, хвосты кривых распределения более утяжелены за счет центральной вершины. И наоборот, если К<0, то распределение имеет более тонкие хвосты и более тяжелую, более широкую вершину.
Эксцесс подходит для обнаружения событий ударов капсулы, поскольку данные события, как правило, выталкивают хвосты выборочного распределения достаточно предсказуемым образом, делая результат несомненно негауссовским. Шум вдоха сам по себе является гораздо более гауссовским.
Это дает два типа сигналов, требующих различения:
- Шум вдоха, капсула отсутствует (низкий К, низкий до среднего σ2)
- Шум вдоха, капсула присутствует (средний К, низкий до высокого σ2)
Были проведены проверки методом моделирования с целью иметь возможность устанавливать принадлежность сигнала к одному или двум классам (Н1 = шум вдоха + капсула присутствует, Н0 = не Н1). Некоторые примерные результаты изображены на диаграмме разброса на фиг.2.
Она иллюстрирует все отсчеты данных, записанные с использованием микрофона одного примерного типа. Две различные области результатов могут быть выделены на указанной диаграмме разброса. Между ними находится область, в которую результаты не попадают. Две указанные области представляют собой шум вдоха вместе с вращающейся капсулой и чистый шум вдоха.
Как упоминалось, внешний шум имеет более низкий эксцесс. Когда такой сигнал добавляется к сигналу капсула + шум вдоха, итоговый эксцесс становится меньше. Следовательно, экспериментальные точки сдвинутся ниже на диаграмме разброса.
После вычисления дисперсии и эксцесса необходимо принять классификационное решение по результатам. Это делается путем проверки того, в которую из трех областей, очерченных линиями на Фиг.2, попадает экспериментальная точка.
Все, что попадает выше верхней линии С, представляет собой сигнал, указывающий на присутствие капсулы. Все, что попадает ниже нижней линии D, представляет собой чистый шум вдоха. Все, что попадает между указанными двумя линиями, представляет собой капсулу вместе с шумом.
Следует отметить, что очень высокие уровни внешнего шума могут скрывать шум капсулы и поэтому выталкивать экспериментальные точки из области капсулы в область, где капсула отсутствует. Для выявления таких проблемных моментов могут применяться технические приемы, описываемые ниже.
Данный алгоритм является полезным, поскольку он надежный, имеет низкую вычислительную сложность и пониженные требования к запоминающему устройству. Следует отметить, что вычисление эксцесса требует довольно большого динамического диапазона, так как должны вычисляться квадраты и квадраты квадратов.
Данный технический прием работает для частот выборки до нескольких килогерц. Выборка по Найквисту не требуется до тех пор, пока еще можно отобрать пиковые значения.
Описанный ранее статистический способ высшего порядка может быть упрощен. Целью данного способа является обнаружение присутствия высоких пиков в сигнале, несмотря на то что уровень большей части сигнала довольно мал. Это было осуществлено путем вычисления эксцесса. Потенциально более простой способ состоит в использовании отношения пикового значения к среднему значению квадрата сигнала.
Для данного способа сигнал снова пропускается через фильтр верхних частот, описанный в выражении (1). Затем вновь вычисляется дисперсия для окон в, как правило, 2048 отсчетов. Также величина наибольшего квадрата образца сигнала записывается для каждого окна. Ее значение делится на среднее значение для получения отношения пикового значения к среднему значению.
Дисперсия и отношение пикового значения к среднему значению далее используются так же, как дисперсия и эксцесс прежде. Это иллюстрирует фиг.3.
Выполняется такая же обработка, как и раньше, при которой экспериментальные точки группируются согласно их области на диаграмме разброса данных.
Данный способ имеет идентичные пониженные требования к запоминающему устройству, как и статистический способ высшего порядка. В дополнение, он требует меньшего количества вычислений и имеет меньший динамический диапазон. Это упрощает работу на недорогих и небольших маломощных процессорах, которые, как правило, предлагают только вычисления с фиксированной запятой.
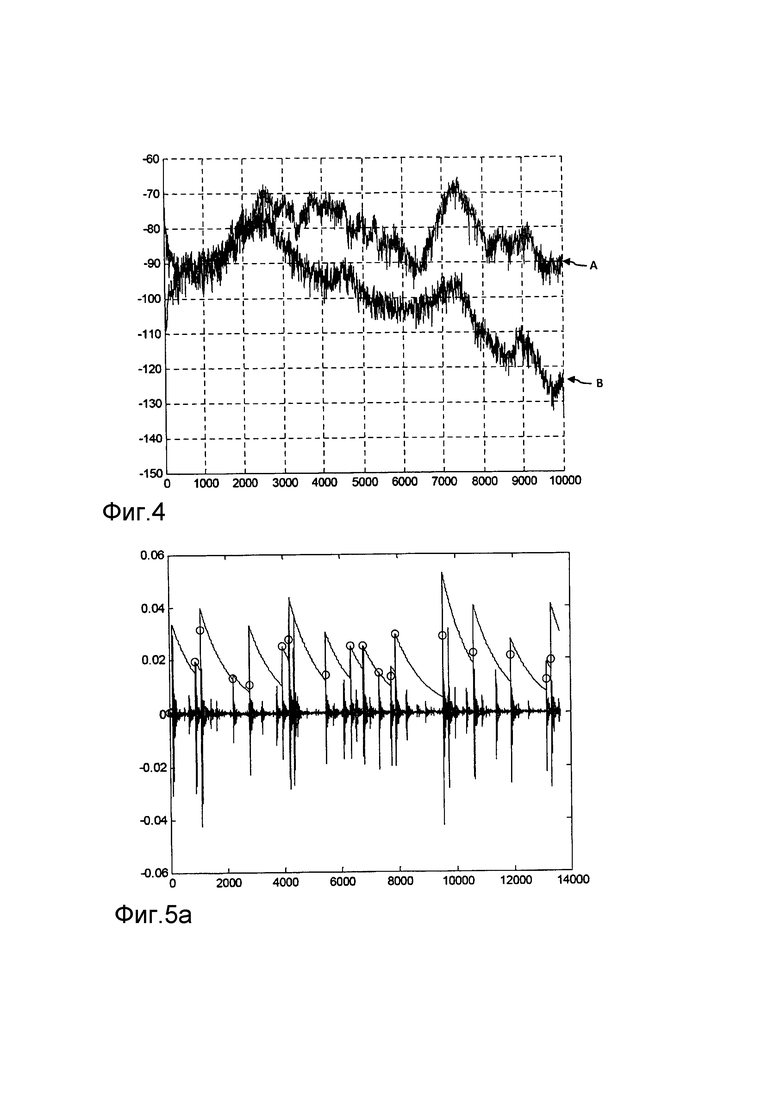
Другим алгоритмом, который может быть применен для анализа сигнала от датчика, является анализ селектора в частотной области. Фиг.4 иллюстрирует сравнение анализа сигнала от события воздушного потока (50 л/мин) в ингаляторе с присутствующей капсулой, Линия А, и без капсулы, Линия B. Очевидно, что спектры частот с данными при полной капсуле и без капсулы аналогичны по амплитуде в полосе частот от 1 кГц до 2,5 кГц, но очень отличаются при частотах выше 4 кГц, что имеет место из-за различимых сигналов от ударов капсулы внутри ингалятора.
Данный алгоритм сравнивает энергию сигнала в полосе от 1 кГц до 2,5 кГц с энергией сигнала выше 3 кГц. Это может быть осуществлено посредством выполнения быстрого преобразования Фурье и суммирования энергии в различных полосах, либо более просто во временной области путем использования совокупности полосового фильтра и фильтра верхних частот. Данные фильтры и последующее сравнение энергии могут быть осуществлены с использованием аналоговых или цифровых технологий. Данный алгоритм является полезным, благодаря низкой сложности вычислений, в случае если он осуществляется во временной области с использованием фильтров.
Из испытаний при различных величинах расхода воздуха и со смоделированными профилями шума и вдоха было найдено, что данный способ предоставляет достаточно надежный способ обнаружения присутствия капсулы в ингаляторе, даже при наличии шумов высокого уровня. Было замечено, что большая часть протестированного спектрального состава внешнего шума была ниже 1000 Гц и поэтому не повлияла бы на выполняемое вычисление отношения энергий.
Другой способ состоит в применении алгоритма обнаружения пика, целью которого является установление всех пиковых значений в сигнале, вызванном ударами капсулы. В данном случае так же сигнал пропускается через фильтр верхних частот, как в выражении (1). Оставшаяся часть алгоритма может выполняться на взятых в квадрате образцах фильтрованного сигнала или просто на самом фильтрованном сигнале. Сигнал может обрабатываться с использованием скользящего окна, чтобы обеспечить возможность рассчитать профиль в зависимости от времени, но это необязательно.
Для данного алгоритма амплитуды образцов или квадратов их величин сравниваются с величиной удержания пикового значения. Если образец больше указанной величины удержания пикового значения, то считается, что произошло новое событие удержания пикового значения. В данном случае счетчик пиков дает приращение и величина удержания пикового значения устанавливается на значение отсчета. Если, однако, следующий образец меньше по амплитуде, чем величина удержания пикового значения, событие удержания пикового значения не отмечается и текущая величина удержания пикового значения просто уменьшается путем умножения ее на соответствующий коэффициент затухания (в данном случае подходящее значение составляет около 0,99). Ниже дается псевдокод для данного алгоритма, где d(k) есть k-ый образец данных, а pk_hold есть величина удержания пикового значения.
IF d(k) > pk_hold
pk_hold = d(k)
peak_counter = peak_counter + 1
peak_event(k) = 1;
ELSE
pk_hold = 0,999 *pk_hold
END
В указанном символическом коде не показано, что в одном варианте осуществления данного алгоритма требуется обработать, по меньшей мере, 20 отсчетов, прежде чем следующее событие удержания пикового значения будет признано произошедшим. Это предотвращает образование группы событий удержания пикового значения поблизости от возникновения события удара капсулы и гарантирует то, что каждый удар считывается только один раз.
Также шум низкого уровня можно устранить с помощью порогового значения. Только величины образцов, превышающие пороговое значение, считаются действительно пиковыми. Это позволяет исключить подсчет очень малых пиков, которые не являются ударами капсулы на самом деле.
Обнаружив события удержания пикового значения, алгоритм измеряет время между двумя следующими друг за другом событиями, из чего может быть вычислена основная частота. Затем подсчитывается ряд возникновений конкретных основных частот в пределах полосы в 10 Гц. Результаты испытаний ингалятора рассматриваемого типа показывают, что, благодаря четко выраженным событиям ударов капсулы, импульсный сигнал от измерения полной капсулы имеет низкочастотную часть состава сигнала, большую, чем высокочастотная часть состава, и поэтому сравнение энергии сигнала ниже 110 Гц с энергией сигнала выше 300 Гц является подходящим показателем для разделения событий при полной капсуле и без капсулы.
На фиг.5а и 5b изображены результаты обработки удержания пикового значения для измерений при полной капсуле и без капсулы соответственно. Оба испытания были проведены при величине расхода воздуха 20 л/мин через ингалятор, и графики показывают амплитуду сигнала по вертикальной оси и количество образцов по горизонтальной оси.
Символ «о» представляет собой событие удержания пикового значения, а линии, соединяющие символы «о», показывают его затухание между двумя следующими друг за другом событиями. Из чертежей следует отметить, что значительные пики ударов капсулы располагались для измерения при полной капсуле, но для измерения без капсулы алгоритм просто размещает пики близко друг к другу, благодаря природе формы колебаний сигнала шума.
Испытания при больших величинах расхода воздуха (150 л/мин) показали, что индивидуальные импульсные пики находятся ближе друг к другу, поэтому в измерениях при полной капсуле высокочастотная часть состава сигнала больше и само по себе отношение между энергией ниже 110 Гц и энергией 300-1000 Гц не настолько велико, как такое же соотношение для измерений при меньших величинах расхода воздуха, но так же пригодно для применения.
Несмотря на то что все алгоритмы, описанные на данный момент, обеспечивают хорошую производительность в теории, в условиях тишины, внешний шум или шум, вызванный манипуляцией с ингалятором, могут стать причиной неточных результатов.
Для того чтобы избежать ложных результатов, могут использоваться следующие технические приемы.
Шум, вызванный манипуляцией, может повлечь возникновение отдельных высоких пиков в сигнале. Они довольно схожи с пиками, вызванными ударами капсулы. Однако только весьма ограниченное количество пиков вызывается, например, падением ингалятора или соударением его с твердой поверхностью. Несмотря на то что статистические алгоритмы селектора импульсов частотной области не могут отличить такие события от событий капсулы, они могут быть дополнены способом удержания пикового значения. Классификация по наличию капсулы для сигнала может считаться верной, только если во временном окне присутствует достаточное количество пиков. В противном случае результат классифицируется как шум.
Громкие фоновые шумы могут искажать пики сигнала, которые используются для обнаружения капсулы с помощью различных алгоритмов. Поскольку вдох длится лишь ограниченное время, перед вдохом и после него есть время, в течение которого не должны ожидаться шумы капсулы и вдоха. Следовательно, первая часть сигнала после того, как были нажаты кнопки (как правило, от 0,1 до 0,5 секунды после нажатия кнопок), и последняя часть перед завершением анализа сигнала (как правило, после 10-30 секунд) могут быть использованы для проверки уровней фонового внешнего шума. Если они превышают определенный уровень, что делает применяемый алгоритм(-ы) обнаружения капсулы ненадежным(-ми), будет сформирован результат «шум».
Фиг.6 изображает аппаратное обеспечение, используемое в данном примере. Сигнал от микрофона 16 проходит на аналоговый фильтр 50 высоких частот, который является простым резистивно-емкостным фильтром первого порядка с предельной частотой по уровню 3дБ, равной 1 кГц. Оттуда сигнал проходит на аналого-цифровой преобразователь (АЦП) 52, который производит выборку на 9,6 кГц и имеет разрешение 12 бит. Указанный АЦП может быть встроен в микросхему 54 микропроцессора.
Фиг.7 иллюстрирует пример совокупности алгоритмов, которые могут быть применены к отсчетам, как только они посылаются в микропроцессор 54. Прежде всего, сигнал разделяется на окна длиной 2048 отсчетов во время операции 56 организации окон.
Они обрабатываются с помощью простого фильтра 58 высоких частот. Наиболее простое осуществление состоит в вычитании предыдущего образца из текущего. Этим устраняются любые смещения постоянной составляющей, которые могут присутствовать из-за особенностей схемы в АЦП. В типовом сигнале может быть вдыхание в течение примерно двух секунд в начале сигнала, за которым следует период тишины. Окно поиска должно быть намного длиннее вдоха, поскольку время, затрачиваемое пользователем между прокалыванием капсулы и вдыханием, неизвестно.
Далее сигнал возводится в квадрат 60 и вычисляется 62 среднее значение квадратов образцов по всем 2048 образцам в данном окне. Это выполняется в верхней ветви диаграммы алгоритма, изображенной на фиг.7. Также наибольшее значение квадрата записывается 64 в центральной ветви. Это может быть сделано в то время, когда вычисляются значения квадратов, или путем поиска по всем квадратам образцов, если они сохраняются в запоминающем устройстве. После вычисления всех квадратов образцов и их средних значений и нахождения их пикового значения, вычисляется 66 отношение пикового значения к среднему значению. И среднее значение квадратов (дисперсия), и отношение пикового значения к среднему значению сохраняются для данного окна для дальнейшей классификации.
Нижняя ветвь диаграммы алгоритма на фиг.7 считает пики в пределах окна 68. Во-первых, пороговое значение используется для удаления мелких пиков, вызванных шумом. Затем применяется алгоритм обнаружения пиков с целью найти пики, вызванные ударами капсулы.
Данный процесс повторяется для каждого окна до тех пор, пока все окна не будут обработаны. Ожидается, что будет получена группа результатов при приблизительно нулевой дисперсии и с низким отношением пикового значения к среднему значению. Это результаты из окон, которые включают в себя только внешний шум, например, после вдыхания. Окна во время вдыхания, как правило, дают результаты с более высокой дисперсией и отношением пикового значения к среднему значению.
Классификация 70 начинается с поиска окна с наивысшим значением дисперсии. Поскольку оно содержит наибольшую энергию сигнала, это дает самую достоверную информацию в присутствии других шумов. Другие меры, такие как поиск непрерывного множества окон с максимально высокой энергией, также возможны для достижения оптимальной достоверности. Для окна с наибольшим значением дисперсии, относящееся к нему отношение пикового значения к среднему значению находят среди результатов.
Результат теперь необходимо классифицировать путем сравнения его с группой пороговых значений. Данные пороговые значения были установлены посредством проведения большого количества экспериментов с капсулой и без капсулы для различных объемов расхода воздуха. Диаграмма разброса результатов данных экспериментов, в большинстве случаев, может быть разделена на четыре области:
1. «Капсула» обычно находится наверху. Это область высокой величины отношения пикового значения к среднему значению (PMR) из-за резких максимумов от капсулы.
2. «Тишина». Данная область имеет очень низкое значение дисперсии и низкое PMR.
3. «Без капсулы». Данная область имеет низкое значение дисперсии и низкое PMR. Максимальная величина дисперсии намного ниже, чем максимальная величина дисперсии, достигаемая для капсул, поскольку никакие удары капсулы не могут увеличить уровень шума.
4. «Капсула с шумом». Данная область соответствует промежутку между областями «Капсула» и «Без капсулы». Результаты попадают в данную область, если сигнал капсулы подвергался воздействию внешнего шума высокого уровня. Поскольку шум уровня внешнего имеет меньшее PMR, чем шум капсулы, он снижает общее значение PMR.
В заключение, выполняются проверки в отношении двух проблемных моментов, которые могут возникнуть в результате уже проведенной обработки. Шумы от манипуляции с ингалятором 72, например его случайного падения на твердую поверхность, вызывают резкие максимумы в сигнале. Это может подавить дисперсию и спровоцировать очень высокое PMR. Тогда это приведет к ошибочной классификации как «Капсула». Такие события шума от манипуляции обычно показывают только от двух до четырех пиков на окно, тогда как вращающаяся капсула показывает более 10. Также, из-за длительности вдоха, капсула вращается в течение, по меньшей мере, одной секунды. Следовательно, количество пиков в пяти последовательных окнах суммируется. Если данная сумма больше 50, классификация «Капсула» подтверждается. В противном случае классификационное заключение исправляется на «Шум».
В некоторых случаях тихий сигнал капсулы может быть скрыт громким внешним шумом. Благодаря низкому PMR, он попадет в область «Без капсулы». Чтобы распознать данную ситуацию, дисперсия в последнем обработанном окне проверяется 74. Если ее величина больше приблизительно двух пороговых значений тишины, классификационное заключение исправляется на «Шум». Это помогает обеспечить то, что не сообщается никаких ложных негативных результатов или сообщается очень малое их количество.
Следует учитывать, что данное изобретение было описано выше только в качестве примера и что модификации в деталях могут быть сделаны без отклонения от объема Формулы изобретения.



Изобретение относится к медицинской технике, а именно к ингалятору, содержащему вместилище для капсулы для вмещения капсулы с лекарственным средством. Ингалятор включает в себя канал для воздушного потока, проходящий через вместилище для капсулы. Имеются первый датчик, процессор и источник питания. Вместилище для капсулы определяется, по меньшей мере, одной стенкой и выполнено так, что, когда капсула располагается во вместилище и достаточное количество воздуха протекает по каналу для воздушного потока через вместилище, указанная капсула двигается внутри вместилища для капсулы. Первый датчик расположен на ингаляторе таким образом, что он способен обнаруживать движение капсулы внутри вместилища и формировать первый сигнал, указывающий на упомянутое движение. Процессор получает указанный первый сигнал от первого датчика и использует упомянутый первый сигнал для определения того, указывает ли первый сигнал на присутствие, или отсутствие, капсулы во вместилище во время события воздушного потока, и для формирования сигнала капсулы, указывающего на это. 13 з.п. ф-лы, 7 ил.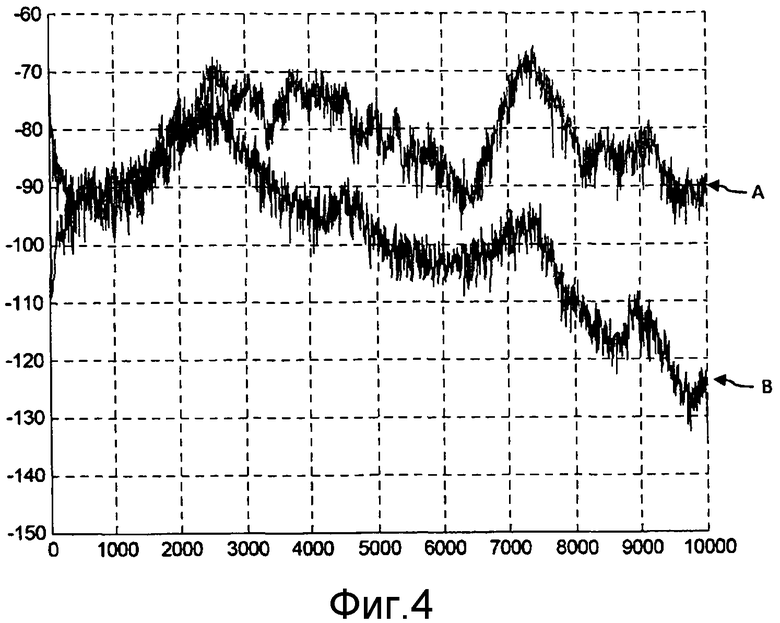
1. Ингалятор, содержащий вместилище для капсулы для вмещения капсулы с лекарственным средством, канал для воздушного потока, по которому воздух протекает во время события воздушного потока от, по меньшей мере, одного впускного отверстия для воздуха к выпускному отверстию, причем канал для воздушного потока проходит через вместилище для капсулы, первый датчик, процессор и источник питания для питания указанного процессора, причем вместилище для капсулы определяется, по меньшей мере, одной стенкой и выполнено так, что, когда капсула располагается во вместилище для капсулы и достаточное количество воздуха протекает по каналу для воздушного потока через вместилище для капсулы, указанная капсула двигается внутри вместилища для капсулы, причем первый датчик расположен на ингаляторе таким образом, что он способен обнаруживать движение капсулы внутри вместилища для капсулы и формировать первый сигнал, указывающий на упомянутое движение, причем процессор получает указанный первый сигнал от первого датчика и использует упомянутый первый сигнал для определения того, указывает ли первый сигнал на присутствие, или отсутствие, капсулы во вместилище для капсулы во время события воздушного потока, и для формирования сигнала капсулы, указывающего на это.
2. Ингалятор по п. 1, в котором первый датчик является датчиком удара и первый сигнал является сигналом удара, и вместилище для капсулы определяется, по меньшей мере, одной стенкой, причем вместилище для капсулы выполнено так, что при движении капсулы внутри вместилища для капсулы капсула многократно ударяется о, по меньшей мере, одну стенку, причем датчик удара расположен на ингаляторе таким образом, чтобы иметь возможность обнаруживать удары капсулы о стенку контейнера для капсулы и формировать сигнал удара, указывающий на каждый удар.
3. Ингалятор по п. 1, в котором ингалятор дополнительно включает в себя запоминающее устройство для хранения сигнала капсулы для одного или нескольких событий воздушного потока для дальнейшего извлечения.
4. Ингалятор по п. 1, в котором ингалятор дополнительно включает в себя устройство вывода, которое может обеспечить доступ к сигналу капсулы или содержимому запоминающего устройства.
5. Ингалятор по п. 1, в котором процессор анализирует сигнал удара от датчика с помощью алгоритма обнаружения пиков и определяет, находится ли расчетная частота пиков в пределах заданных границ, для выработки сигнала капсулы.
6. Ингалятор по п. 1, в котором процессор анализирует сигнал удара от датчика с использованием алгоритма селектора в частотной области и определяет, находится ли отношение интенсивности сигнала между двумя различными предварительно заданными диапазонами частот в пределах предварительно заданных границ, для выработки сигнала капсулы.
7. Ингалятор по п. 1, в котором процессор анализирует сигнал удара от датчика с использованием алгоритма статистики двух переменных, который вычисляет две статистические переменные для характеристики сигнала, и определяет, попадают ли вычисленные статистические меры в заданную область на диаграмме разброса данных одной переменной относительно другой, для выработки сигнала капсулы.
8. Ингалятор по п. 7, в котором вычисляемыми переменными являются эксцесс и дисперсия.
9. Ингалятор по п. 7, в котором вычисляемыми переменными являются отношение пикового значения к среднему значению квадрата, или амплитуды, сигнала удара и дисперсия.
10. Ингалятор по п. 1, в котором процессор анализирует сигнал удара от датчика с использованием, по меньшей мере, двух различных алгоритмов.
11. Ингалятор по п. 1, в котором первый датчик является микрофоном или пьезоэлементом.
12. Ингалятор по п. 1, в котором вместилище для капсулы включает в себя участок, который имеет, по существу, цилиндрическую форму с диаметром больше длины капсулы, которая должна помещаться внутрь него, и высотой больше диаметра капсулы, но меньше длины капсулы, и канал для воздушного потока выполнен с возможностью заставлять капсулу вращаться внутри вместилища для капсулы.
13. Ингалятор по п. 1, в котором ингалятор содержит, по меньшей мере, один привод, который может быть приведен в действие пользователем, для того чтобы открывающий элемент вскрыл капсулу внутри ингалятора, причем ингалятор далее содержит датчик привода для восприятия запуска привода и формирования сигнала запуска, причем процессор выполнен с возможностью приема сигнала запуска.
14. Ингалятор по п. 13, в котором процессор выполнен с возможностью формирования сигнала дозы, указывающего на то, следовал ли пользователь правильному порядку использования ингалятора, причем процессор формирует указанный сигнал дозы на основе сигнала капсулы и сигнала запуска, а также порядка, в котором данные сигналы были сформированы, и времени между сигналами.
| WO2009075794A1, 18.06.2009 | |||
| WO2007101438A1, 13.09.2007 | |||
| WO2005042076A1, 12.05.2005 | |||
| ИНГАЛЯТОР С НАПРАВЛЕННЫМ ДАТЧИКОМ ПОТОКА | 2005 |
|
RU2372105C2 |

