ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области медицинских устройств, более конкретно изобретением предусмотрен ингалятор с двумя микрофонами для обнаружения вдыхаемого потока.
УРОВЕНЬ ТЕХНИКИ
Хорошо известно применение ингаляторов для введения лекарственных препаратов для лечения обструктивных болезней дыхательных путей. Существуют различные типы ингаляторов, каждый из которых обладает своими преимуществами и недостатками. Системы на основе небулайзера/компрессора требуют минимального взаимодействия с пациентом и координирования его действий, но являются неудобными и отнимают много времени при использовании. Дозирующие ингаляторы (ДИ) являются очень портативными и обеспечивают возможность их быстрого использования, которое, однако, требует обучения пациента для координирования его действий при надлежащем использовании. Другим типом ингаляторов являются ингаляторы сухого порошка (ИСП).
ДИ, как правило, имеет корпус, который обычно представляет собой цельнопластиковую конструкцию, в которую может вставляться металлическая емкость, в которую может быть помещен пропеллент. Правильная работа ДИ затруднена, поскольку несколько действий должны быть выполнены последовательно: 1) Встряхивание ингалятора перед использованием, 2) Подготовка (выпуск в воздух), если ингалятор не использовался в течение нескольких дней или, в некоторых других случаях (новая емкость, если ДИ ронялся и т.д.), 3) Достаточный выдох для использования функциональной остаточной емкости (ФОЕ) легких насколько это возможно, 4) Выпуск (выпуск в ротовую полость), 5) Вдох достаточной длительности (несколько секунд) для вдыхания лекарственного препарата и 6) Задержка дыхания достаточной длительности для удержания лекарственного препарата в легких.
Таким образом, при использовании ДИ может быть допущено много ошибок. Например, измерение времени между выпуском и вдохом может быть неправильным, или длительность вдоха может быть слишком короткой по причине слишком сильного вдоха, препятствуя, таким образом, попаданию лекарственного препарата наиболее глубоко в легкие. Было обнаружено, что от 26 до 70 % пациентов, использующих ДИ, не удается вдыхать медленно и глубоко, т.е. вдыхать с оптимальным объемным расходом, составляющим от 25 до 60 литров в минуту.
В US2009/314292 A1 описаны устройства и способы обнаружения и измерения характерных режимов использования ингаляционной системы сухого порошка субъектом в режиме реального времени. Однако в US2009/314292A1 не описано, каким образом можно точно определить различные события вдоха.
В US2009/308387 A1 описано устройство, которое может быть присоединено к ингалятору. Вдыхаемый поток измеряется акустически за пределами ингалятора с помощью микрофона или аналогичного акустического датчика или датчика вибраций. В US2009/314292A1 не описано, каким образом можно точно определить различные события вдоха.
В EP 1 993 642 B1 (компания «Bang & Olufsen Medicom A/S») описан ДИ с микрофоном, расположенным в дополнительном устройстве для присоединения к ДИ. Микрофон улавливает звук в диапазоне частот от 100 до 3000 Гц, который используется для определения, например, скорости вдыхаемого потока. Однако для нормальной окружающей среды с фоновым шумом такое устройство может быть не способно обеспечивать достоверное измерение скорости потока.
В WO 2014/033229 A1 описана система мониторинга техники использования пользователем устройства ингалятора, имеющего микрофон для обнаружения звука, издаваемого во время работы устройства ингалятора. Дыхательные характеристики вдоха и выдоха анализируются с помощью временных и спектральных компонентов. Могут быть проанализированы частотные компоненты идентифицированных звуков дыхания, а также могут содержаться средства для классификации обнаруженных звуков вдох или выдох. Наряду с первым микрофоном может использоваться второй микрофон для разграничения выдохов и вдохов.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Исходя из вышеуказанного, представляется целесообразным разработать ингалятор, который помогает пользователю научиться получать при вдохе необходимый объемный расход или необходимую скорость потока и который может использоваться в нормальной окружающей среде. Кроме того, представляется целесообразным обеспечить возможность измерения объемного расхода, осуществляемого во время осуществления вдоха пользователем и с помощью недорогого оборудования. Помимо этого, представляется целесообразным разработать ингалятор, который может автоматически определять различные события во время его использования, такие как подготовка, выпуск и вдох.
Согласно первому аспекту настоящего изобретения предусмотрена система, содержащая ингалятор для выдачи аэрозоля или сухого порошка, при этом ингалятор содержит корпус, имеющий впускное воздушное отверстие и выпускное воздушное отверстие, причем корпус определяет прочный канал между впускным воздушным отверстием и выпускным воздушным отверстием, первый чувствительный элемент, расположенный в первом положении наружной поверхности корпуса, а также второй чувствительный элемент, расположенный во втором положении наружной поверхности корпуса, причем первое и второе положения разнесены друг от друга, при этом первое положение выбрано так, чтобы находиться на меньшем расстоянии от впускного воздушного отверстия, чем второе положение, и причем первый и второй чувствительные элементы выполнены с возможностью обнаружения звука или вибраций, исходящих от потока в проточном канале, такого как поток, представляющий собой воздушный поток (в частности смесь окружающего воздуха с одним из: аэрозоля и сухого порошка), и процессор, выполненный с возможностью обработки выходных сигналов от первого и второго чувствительных элементов в соответствии с алгоритмом с выработкой характеристики потока в проточном канале, причем указанный алгоритм включает этап классификации событий, предназначенный для анализа звука или вибраций, обнаруженных первым и вторым чувствительными элементами с обеспечением возможности идентификации по меньшей мере одного события. В частности, поток может генерироваться пользователем, осуществляющим вдох через выпускное воздушное отверстие.
Кроме того, указанный алгоритм включает идентификацию событий, относящихся к процедуре вдоха в ответ на выходные данные с первого и второго чувствительных элементов, и указанный алгоритм включает этапы обнаружения сигнала и/или классификации сигнала, предназначенные для идентификации процедуры вдоха с обеспечением возможности автоматического использования без каких-либо вводов пользователя, таких как нажатие на кнопку и т.д. Кроме того, указанный алгоритм включает этап классификации событий, предназначенный для анализа звука или вибраций, обнаруженных первым и вторым чувствительными элементами, и идентифицирующий по меньшей мере одно событие или все из следующих: подготовка, выпуск и вдох. В частности, указанный алгоритм включает этап классификации событий, предназначенный для анализа звука или вибраций, обнаруженных первым и вторым чувствительными элементами, для обеспечения возможности идентификации по меньшей мере одного или всех из: события подготовки, события выпуска и события вдоха. Этим обеспечивается полностью автоматическое изделие, способное идентифицировать критические события при использовании ДИ, и это упрощается за счет использования двух разнесенных друг от друга чувствительных элементов, например микрофонов. Этап классификации событий выполняют для разграничения, с одной стороны, события подготовки и события выпуска, и события вдоха, с другой стороны, на основе параметра длительности, полученной исходя из времени начала и окончания событий, причем этап классификации событий выполняют для разграничения между событием подготовки, с одной стороны, и событием выпуска, с другой стороны, основываясь на различиях мощности между звуком или вибрациями, обнаруженными первым и вторым чувствительными элементами.
Данный ингалятор обладает преимуществом, поскольку было установлено, что представляется возможным обнаруживать объемный расход (скорость потока) в пределах от 15 до 120 литров в минуту, в частности точно в пределах от 25 до 60 литров в минуту, на основе двух разнесенных друг от друга чувствительных элементов звука и вибрации, например, двух микрофонах, для улавливания звука или вибраций на наружной поверхности корпуса ингалятора. Таким образом, когда пользователь вдыхает дозу аэрозоля или сухого порошка через выпускное воздушное отверстие ингалятора, представляется возможным определение характеристики потока, например, скорости потока или временной продолжительности вдоха, на основе выходных данных от первого и второго чувствительных элементов. Таким образом, представляется возможным определить, находится ли вдыхаемый поток в заранее установленных пределах для правильного использования, обеспечивая, таким образом, обратную связь с пользователем в отношении процедуры вдоха, например, является ли вдох слишком сильным, слишком слабым или правильным. Кроме того, использование двух разнесенных друг от друга микрофонов также обеспечивает возможность улучшенного обнаружения и классификации событий во время использования ингалятора, т.е. подготовки, выпуска и вдоха, обеспечивая, таким образом, возможность определения начала и окончания таких событий и обеспечивая, таким образом, возможность оценки того, находится ли относительное время выполнения этих событий в заранее установленных пределах.
Изобретение основано на наблюдении того, что при наличии двух чувствительных элементов представляется возможным эффективным образом подавлять фоновый шум, используя различные технологии обработки сигналов, основанные на предположении о том, что два чувствительных элемента улавливают по существу одинаковый уровень шума. Кроме того, было обнаружено, что может быть преимущественно ограничить диапазон частот до диапазона от 3 до 6 кГц для преобразования обнаруженных звуковых сигналов или сигналов вибрации, например, в форме измеренного уровня звукового давления, в характеристику потока в проточном канале, например скорость потока. Следует понимать, что особое преобразование, необходимое для преобразования звука или вибрации в характеристику потока, может зависеть от фактической конструкции ингалятора. Таким образом, может быть необходимо обеспечить соответствующие измерения звука/вибрации и потока для получения точности, необходимой для конкретного устройства ингалятора.
Располагая ингалятором, согласно первому аспекту, представляется возможным количественное измерение вдыхаемого потока с высокой точностью, даже в нормальной окружающей среде с фоновым шумом, даже если уловленные сигналы, возникающие вследствие потока в прочном канале внутри корпуса ингалятора, являются достаточно слабыми. Это обеспечивает возможность обучения пользователя вдоху с наиболее эффективным объемным расходом, например, посредством системы, предоставляющей пользователю обратную связь в ответ на силу вдоха после процедуры вдоха.
Расположение двух чувствительных элементов на наружной поверхности корпуса ингалятора обеспечивает возможность применения настоящего изобретения в виде учебного набора ингалятора, в котором два чувствительных элемента установлены на конструкции, что позволяет пользователю присоединять чувствительные элементы к корпусу существующих типов ингаляторов и отсоединять их от него. Обработка сигналов, требуемая для вычисления характеристики вдыхаемого потока, может быть обеспечена в отдельном блоке процессора, что позволяет предоставить пользователю выходные данные в ответ на вычисленную характеристику потока. Например, такой отдельный блок процессора может быть в форме компьютера, смартфона или специализированного устройства, предназначенного для проводного или беспроводного соединения с первым и вторым чувствительными элементами и блоком процессора. Он может быть прикреплен с помощью клейкой ленты или механических крепежных средств в форме захватных рычагов и т.д. Однако следует понимать, что в других вариантах реализации ингалятор может представлять собой специальный обучающий ингалятор с двумя микрофонами, прикрепленными к корпусу ингалятора.
Кроме того, два чувствительных элемента могут использоваться для обнаружения других событий в отношении использования ингалятора, а именно, посредством применения алгоритмов классификации к обнаруженному звуку или вибрациям для определения времени выполнения различных событий при использовании ингалятора. Они также могут использоваться для предоставления пользователю обратной связи с целью обучения пользователя более правильному использованию ингалятора. Было обнаружено, что представляется возможным предоставить алгоритм, который автоматически обнаруживает события вдоха только в ответ на звук или вибрации, захваченные первым и вторым чувствительными элементами, и обеспечивая, таким образом, возможность простого использования ингалятора. Например, ингалятор может быть полностью автоматизирован, как например, переход в активное состояние сразу же после обнаружения движения ингалятора, например, обнаружения с помощью акселерометра, например, являющимся одним из первого и второго чувствительных элементов.
Первое положение может быть выбрано вблизи впускного воздушного отверстия и при этом второе положение выбирается вблизи выпускного воздушного отверстия. Таким образом, два чувствительных элемента могут быть расположены в двух положениях прочного канала или вблизи него, и разнесены друг от друга. В одном варианте реализации корпус содержит трубчатую секцию, например прямую трубчатую секцию, с впускным воздушным отверстием на верхнем конце, и причем нижний конец трубчатой секции соединен с мундштуком, образующим выпускное воздушное отверстие. В частности, продольная ось мундштука наклонена относительно продольной оси трубчатой секции. Применительно к данному варианту реализации, первое положение может быть выбрано так, чтобы находиться на части трубчатой секции на расстоянии менее 30%, таком как менее 20%, длины трубчатой секции от ее верхнего конца, и/или второе положение может быть выбрано так, чтобы находиться на части трубчатой секции на расстоянии менее 30%, таком как менее 20%, длины трубчатой секции от ее нижнего конца.
Первое и второе положения могут быть выбраны так, что центральные положения первого и второго чувствительных элементов разнесены друг от друга на расстояние, составляющее по меньшей мере 1 см, предпочтительно по меньшей мере 2 см, например, на расстояние, измеряемое от центра до центра двух чувствительных элементов, или расстояние, основанное на акустических центрах, в случае, если два чувствительных элемента представляют собой микрофоны. Предпочтительно, первое и второе положения выбраны для обеспечения существенного различия в звуке или вибрациях, обнаруживаемых первым и вторым чувствительными элементами. Фоновый шум может быть подавлен более эффективным образом в случае, если имеет место значительное расстояние между двумя чувствительными элементами. Однако в случае, если два чувствительных элемента представляют собой микрофоны, может быть предпочтительным их расположение на одной стороне корпуса для того, чтобы эффективным образом улавливать один и тот же фоновый шум, т.е. без воздействия различными экранирующими эффектами от корпуса.
Первый и второй чувствительные элементы могут быть установлены на конструкции, которая выполнена для обеспечения пользователю возможности присоединения конструкции к указанному корпусу или отсоединения ее от него. Например, конструкции, содержащей один или более клейких элементов, или захватных рычагов, или зажимов для присоединения к корпусу ингалятора. Предпочтительно, конструкция предназначена для закрепления двух чувствительных элементов в фиксированном положении относительно друг друга и ингалятора. В случае микрофонов конструкция может содержать акустический экран с одним или более отверстиями, предназначенными для обеспечения достижения микрофонов по существу одинаковым фоновым шумом. В качестве альтернативы, конструкция содержит экран, предназначенный для уменьшения фонового шума, достигающего двух чувствительных элементов. В качестве альтернативы, первый и второй чувствительные элементы могут быть установлены на соответствующих отдельных конструкциях, которые выполнены с возможностью обеспечения пользователю возможности присоединения конструкции к указанному корпусу и отсоединения ее от него. Данные отдельные конструкции обеспечивают пользователю возможность, например, независимо размещать первый и второй чувствительные элементы, например, обеспечивая возможность использования одного набора с корпусами различных ингаляторов. Такие же вышеописанные способы присоединения к корпусу ингалятора применимы к данным отдельным конструкциям.
Первый и второй чувствительные элементы могут быть выбраны из группы, состоящей из: микрофонов, тензодатчиков, пьезоэлементов, акселерометров, датчиков изгиба, емкостных датчиков, магнитных датчиков, датчиков смещения и оптических датчиков. В частности, два чувствительных элемента являются чувствительными элементами одного типа, предпочтительно, идентичными чувствительными элементами.
Предпочтительно, корпус выполнен с возможностью приема емкости с пропеллентом в отверстии, таком как впускное воздушное отверстие.
Следует понимать, что могут использоваться дополнительные чувствительные элементы в дополнение к первому и второму чувствительным элементам. Например, вместе могут использоваться три, четыре или даже более разнесенных друг от друга чувствительных элементов, например, микрофонов, для предоставления дополнительной информации, которая может в результате привести к большему уменьшению фонового шума, предоставляя, таким образом, данные об объемном расходе с большей точностью.
Алгоритм может быть предназначен для выработки характеристики потока в ответ на ограниченный диапазон частот сигналов от первого и второго чувствительных элементов. В частности, такой как ограниченный диапазон частот от 2 до 7 кГц, такой как от 2 до 5 кГц, такой как от 3 до 7 кГц, от 4 до 7 кГц, или от 3 до 6 кГц, поскольку было обнаружено, что уровень звука или вибраций в данном ограниченном диапазоне частот предназначен для обеспечения хорошей корреляции скорости потока в прочном канале. В частности, было обнаружено, что диапазон частот от 3 кГц до 6 кГц достаточен для обеспечения возможности достоверного определения характеристики объемного расхода по меньшей мере в диапазоне от 25 до 60 литров в минуту, но в целом в пределах объемного расхода от 15 до 120 литров в минуту. Таким образом, алгоритм может включать полосовую фильтрацию сигналов с первого и второго чувствительных элементов для получения сигнала с ограниченной полосой, например, с ограниченными частотами от 3 кГц до 6 кГц, перед определением характеристики потока.
Кроме того, указанный алгоритм включает этап алгоритма подавления шума для подавления нежелательного фонового шума за счет использования разницы в звуке или вибрациях, обнаруженных первым и вторым чувствительными элементами. В частности, данный этап алгоритма подавления шума может включать применение этапа адаптивного формирования луча к выходным данным первого и второго чувствительных элементов, причем этап адаптивного формирования луча предназначен для выработки первых выходных данных, отображающих первый сигнал подавленного шума. Для получения дополнительной информации см., например, EP 1290912 (компании «Philips Electronics N.V.») или статью «Adaptive switching circuits,» авторов B. Widrow и M.E. Hoff Jr. в IRE WESCON Conv.Rec., 1960 г., том часть 4, стр. 96-104, ISBN 0-13-605718-7. Может быть применен дополнительный этап подавления шума, включающий спектральное вычитание, в ответ на выходные данные с указанного этапа адаптивного формирования луча, см., например, статью «Suppression of Acoustic Noise in Speech using Spectral Subtraction,» автора S.F. Boll, IEEE Trans. Acoustics, Speech and Signal Processing, том 27, стр. 113-120, апрель 1979 г.
Указанный алгоритм может включать вычисление уровня звука или вибраций в ответ на выходные данные с указанного алгоритма подавления шума, т.е. на основе сигнала, в котором уменьшено влияние фонового шума, и преобразование указанного уровня звука или вибраций в указанную характеристику потока, например, скорость потока. Например, средняя скорость потока во время периода вдоха может быть вычислена в ответ на обнаруженный фоновый подавленный сигнал. Например, ряды уровней звука и вибрации могут быть конвертированы в ряды уровней скорости потока, например, с использованием таблицы преобразования, определенной для конкретного устройства ингалятора, и в ответ на это может быть вычислена средняя скорость потока.
Процессор может быть предоставлен в отдельном блоке, выполненном с возможностью приема первых и вторых данных в форме цифрового или аналогового сигнала, предоставленного посредством проводного или беспроводного соединения с первым и вторым чувствительными элементами. В качестве альтернативы, процессор может быть присоединен или встроен в дополнительную конструкцию, выполненную с возможностью присоединения/отсоединения от корпуса ингалятора пользователем без использования инструментов. Первый и второй чувствительные элементы могут быть предоставлены в одном отдельном блоке с зажимными средствами или клеящими средствами, выполненными с возможностью присоединения или отсоединения пользователем от корпуса ингалятора, позволяя пользователю, таким образом, использовать, например, различные корпусы ингалятора только с одним набором чувствительных элементов и процессором. В частности, блок процессора может представлять собой смартфон или компьютер, соединенный с первым и вторым чувствительными элементами с помощью беспроводного соединения (например, технологии Bluetooth) или проводного соединения и т.д., причем процессор в смартфоне или компьютере снабжен программным приложением, предназначенным для выполнения указанного алгоритма. В других вариантах реализации, процессор предоставлен вместе с чувствительными элементами в одном блоке, работающем от аккумуляторной батареи, выполненном с возможностью присоединения к корпусу ингалятора.
Второе положение может быть выбрано так, чтобы находиться на меньшем расстоянии от выпускного воздушного отверстия, чем первое положение, обеспечивая, таким образом, близость одного чувствительного элемента к впускному отверстию и близость другого чувствительного элемента к выпускному отверстию, что помогает при идентификации событий подготовки и выпуска.
Указанный алгоритм может включать этап классификации событий, предназначенный для анализа звука или вибраций, обнаруженных первым и вторым чувствительными элементами, для обеспечения возможности идентификации по меньшей мере одного из: события подготовки и события выпуска.
Указанный этап классификации событий может быть предназначен для анализа отличий в обнаруженном звуке или вибрациях с первого и второго чувствительных элементов для разграничения двух событий, например, события подготовки и события выпуска.
В одном варианте реализации система содержит ингалятор для выдачи аэрозоля или сухого порошка, при этом ингалятор содержит корпус, имеющий впускное воздушное отверстие и выпускное воздушное отверстие, между которыми образован проточный канал, первый чувствительный элемент, размещенный в первом положении наружной поверхности корпуса, а также второй чувствительный элемент, размещенный во втором положении наружной поверхности корпуса, причем первое и второе положения разнесены друг от друга, при этом первое положение выбрано так, чтобы находиться на меньшем расстоянии от впускного воздушного отверстия, чем второе положение, и при этом второе положение выбрано так, чтобы находиться на меньшем расстоянии от выпускного воздушного отверстия, чем первое положение, и причем первый и второй чувствительные элементы выполнены с возможностью обнаружения звука или вибраций, исходящих из потока в прочном канале, такого как поток, представляющий собой воздушный поток (в частности смесь окружающего воздуха с одним из: аэрозоля и сухого порошка), и процессор, выполненный с возможностью обработки выходных сигналов от первого и второго чувствительных элементов в соответствии с алгоритмом для выработки характеристики потока в прочном канале, причем указанный алгоритм включает этап классифицикации событий, предназначенный для анализа звука или вибраций, обнаруженных первым и вторым чувствительными элементами, для обеспечения возможности идентификации по меньшей мере одного из: события подготовки, события выпуска, и причем указанный этап классификации событий предназначен для анализа отличий в обнаруженном звуке или вибрациях с первого и второго чувствительных элементов для разграничения событий подготовки и выпуска.
Согласно второму аспекту изобретения предусмотрен способ оценки потока в ингаляторе, причем ингалятор содержит корпус, определяющий прочный канал между впускным воздушным отверстием и выпускным воздушным отверстием, при этом способ включает прием первых данных, отображающих звук или вибрации, обнаруженные первым чувствительным элементом в первом положении наружной поверхности корпуса, и при этом первое положение выбрано так, чтобы находиться на меньшем расстоянии от впускного воздушного отверстия, чем второе положение, и прием вторых данных, отображающих звук и вибрации, обнаруженные вторым чувствительным элементом во втором положении наружной поверхности корпуса, при этом первое и второе положения разнесены друг от друга, и вычисление характеристики потока в прочном канале путем обработки в процессоре первых и вторых данных в соответствии с алгоритмом, идентификацию по меньшей мере одного события.
Указанный алгоритм может быть предназначен для вычисления характеристики потока путем обработки ограниченного диапазона частот первых и вторых данных, такого как ограниченный диапазон частот, содержащий диапазон частот от 2 кГц до 5 кГц, такого как содержащий диапазон частот от 3 кГц до 6 кГц. В частности, было обнаружено, что диапазона частот от 3 кГц до 6 кГц достаточно для обеспечения возможности достоверного определения характеристики объемного расхода по меньшей мере в диапазоне от 25 до 60 литров в минуту, а в целом в пределах объемного расхода от 15 до 120 литров в минуту. Таким образом, способ может включать фильтрацию первых и вторых данных до ограниченного диапазона частот, например, от 3 кГц до 6 кГц, перед осуществлением дальнейшей обработки.
Алгоритм может включать этап алгоритма подавления шума для подавления нежелательного фонового шума, улавливаемого первым и вторым чувствительными элементами. В частности, указанный этап алгоритма подавления шума может включать применение этапа адаптивного формирования луча к первым и вторым данным, причем этап адаптивного формирования луча предназначен для выработки первых выходных данных, отображающих первый сигнал подавленного шума, и вторых выходных данных, отображающих сигнал фонового шума. Кроме того, способ может включать вычитание адаптивно отфильтрованной версии указанных вторых выходных данных, отображающих сигнал фонового шума, из первых выходных данных, отображающих первый сигнал фонового шума, и применение спектрального вычитания к полученному сигналу для получения дополнительного подавления фонового шума.
Алгоритм может включать этап классификации событий, предназначенный для анализа звука или вибраций, обнаруженных первым и вторым чувствительными элементами, для обеспечения возможности идентификации каждого из: события подготовки, события выпуска и события вдоха. Например, этим обеспечивается оценка относительного времени между этими событиями, которое является ключевым параметром для правильного использования ингалятора.
В одном варианте реализации способ включает прием первых данных, отображающих звук или вибрации, обнаруженные первым чувствительным элементом в первом положении наружной поверхности корпуса, и при этом первое положение выбрано так, чтобы находиться на меньшем расстоянии от впускного воздушного отверстия, чем второе положение, и второе положение выбрано так, чтобы находиться на меньшем расстоянии от выпускного воздушного отверстия, чем первое положение, прием вторых данных, отображающих звук или вибрации, обнаруженные вторым чувствительным элементом во втором положении наружной поверхности корпуса, причем первое и второе положения разнесены друг от друга, и вычисление характеристики потока в прочном канале путем обработки в процессоре первых и вторых данных в соответствии с алгоритмом, идентификацию по меньшей мере одного из: события подготовки, события выпуска, и анализ отличий в обнаруженном звуке или вибрациях от первого и второго чувствительных элементов для разграничения событий подготовки и выпуска.
Согласно третьему аспекту изобретения предусмотрен исполняемый на компьютере программный код, выполненный для реализации способа, согласно второму аспекту, при исполнении в процессоре. Таким образом, исполняемый на компьютере программный код способен выполнять этапы способа, согласно второму аспекту, который может быть реализован в программном обеспечении, например, в качестве дополнения или модификации существующего программного обеспечения в устройстве для воздухообмена. В частности, исполняемый на компьютере программный код может присутствовать на энергонезависимом, или, иными словами, не имеющем временного характера (non-transitory) машиночитаемом носителе данных, или он может быть загружен в память системы процессора, предназначенного для исполнения программного кода.
Следует понимать, что те же преимущества и варианты реализации первого аспекта применимы также и ко второму и третьему аспектам. В целом, первый, второй и третий аспекты могут быть скомбинированы и объединены любым способом, возможным в пределах объема настоящего изобретения. Эти и другие аспекты данного изобретения станут понятными после изучения вариантов реализации, описанных ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты реализации настоящего изобретения будут описаны только лишь в качестве примера со ссылкой на чертежи, на которых:
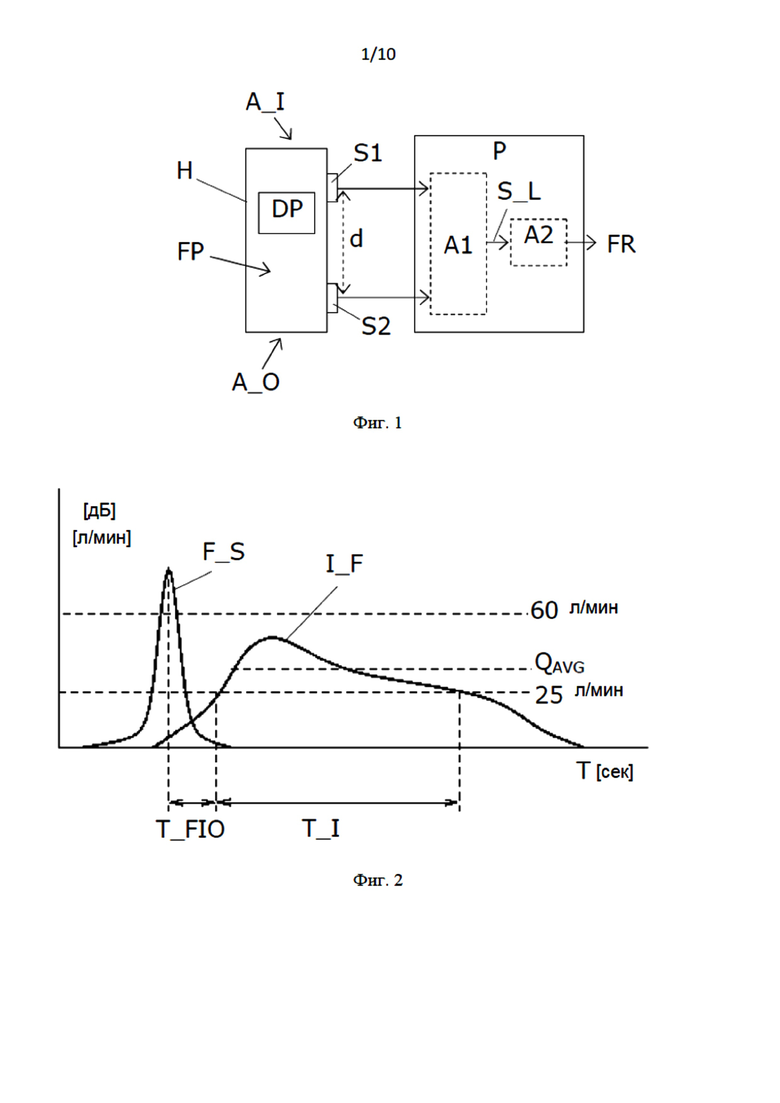
Фиг. 1 показывает блок-схему варианта реализации системы ингалятора,
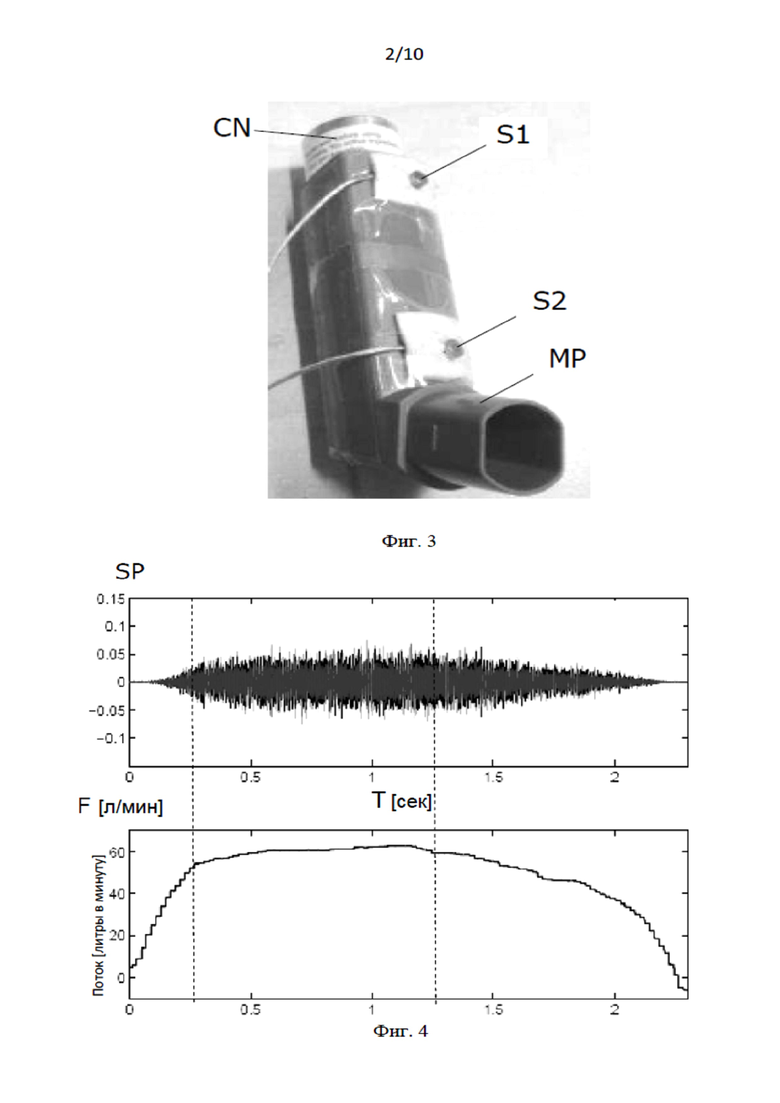
Фиг. 2 показывает клинические параметры для правильного использования ДИ,
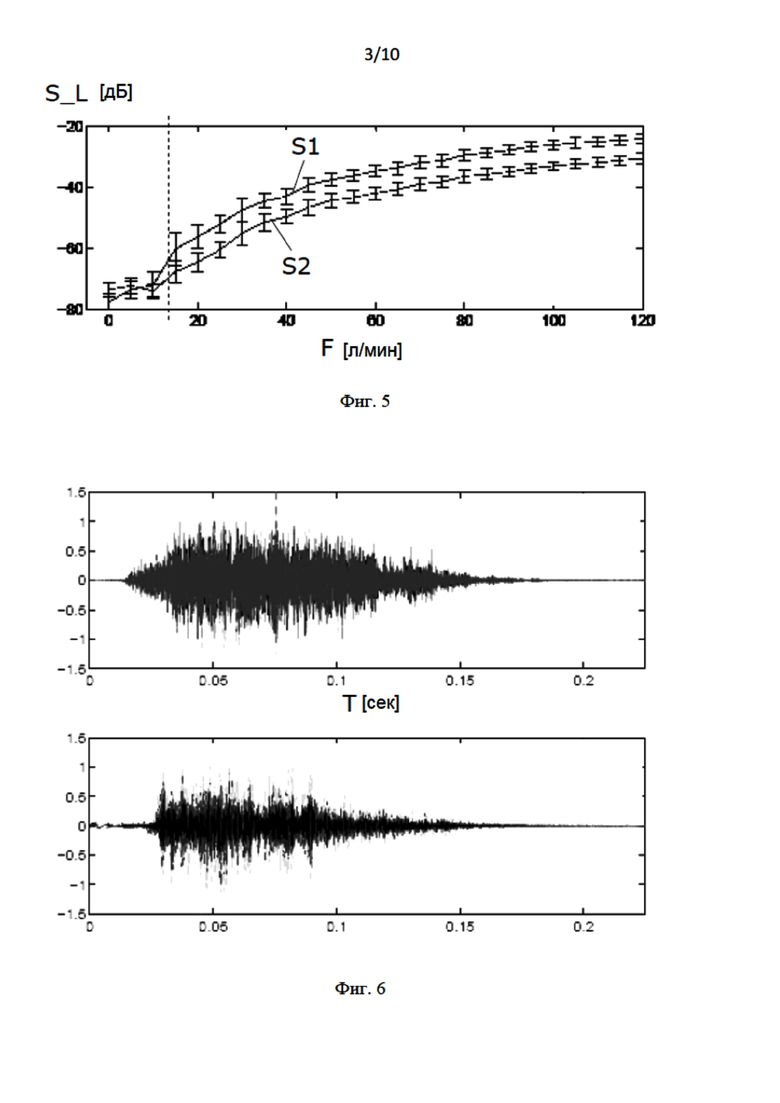
Фиг. 3 показывает фотоснимок прототипа ингалятора с двумя микрофонами,
Фиг. 4 показывает пример измеренного звука и потока, соответственно,
Фиг. 5 показывает пример зависимости между измеренным потоком и звуком,
Фиг. 6 показывает примеры характеристики звука для событий выпуска и подготовки,
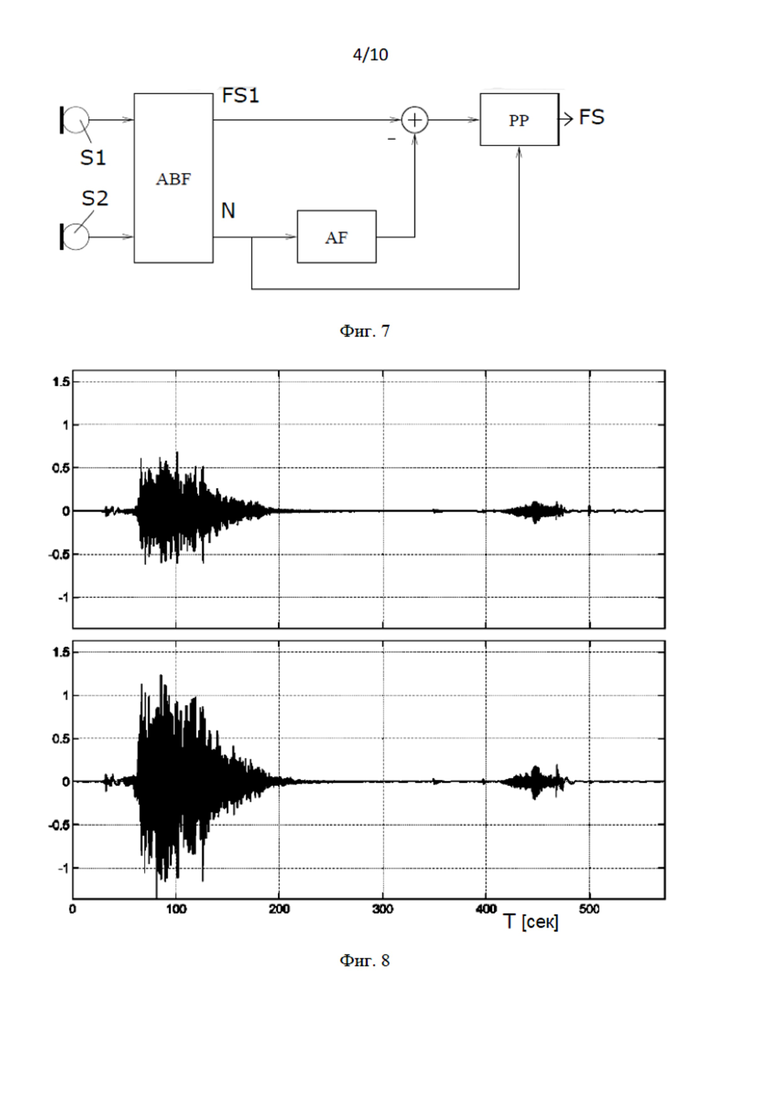
Фиг. 7 показывает схему обработки сигнала для снижения фонового шума с двух чувствительных элементов,
Фиг. 8 показывает пример сигналов звука для события подготовки,
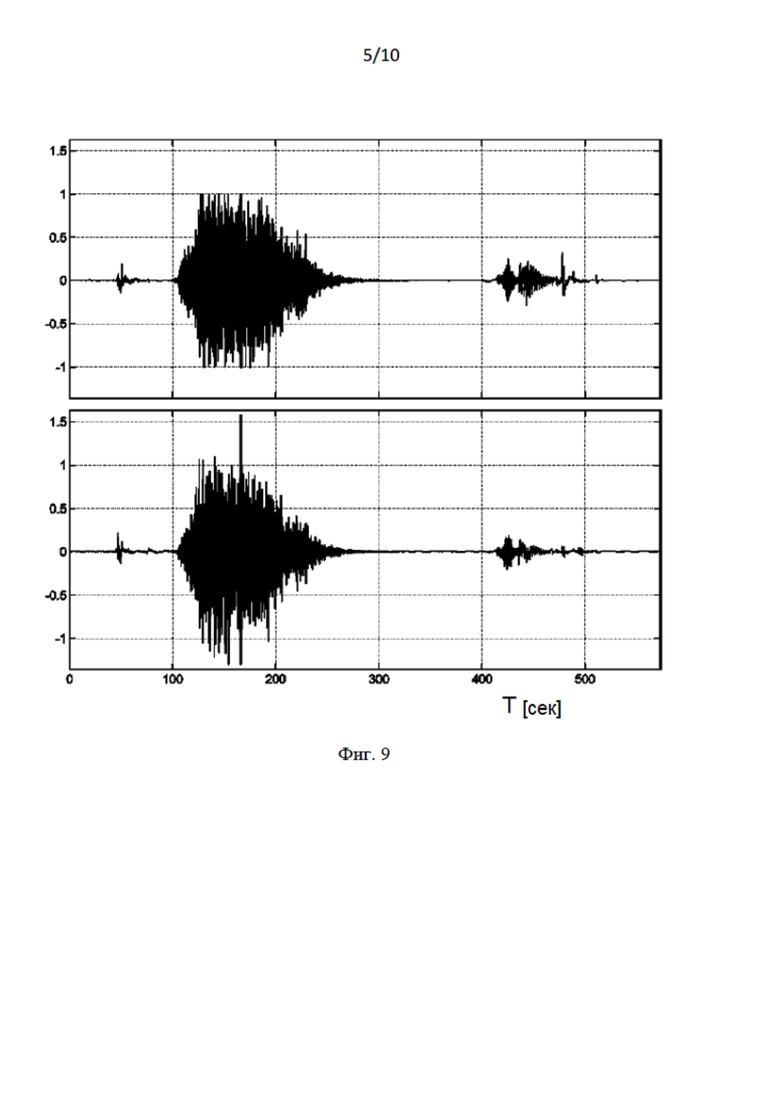
Фиг. 9 показывает пример сигналов звука для события выпуска,
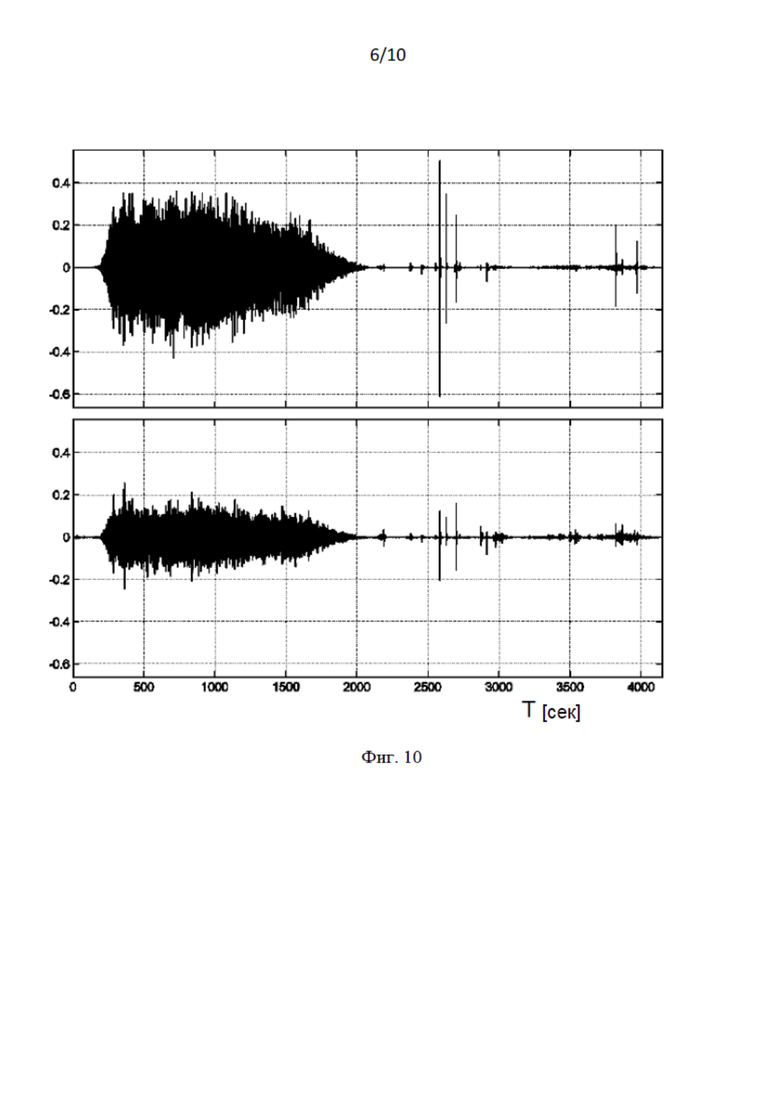
Фиг. 10 показывает пример сигналов звука для события вдоха,
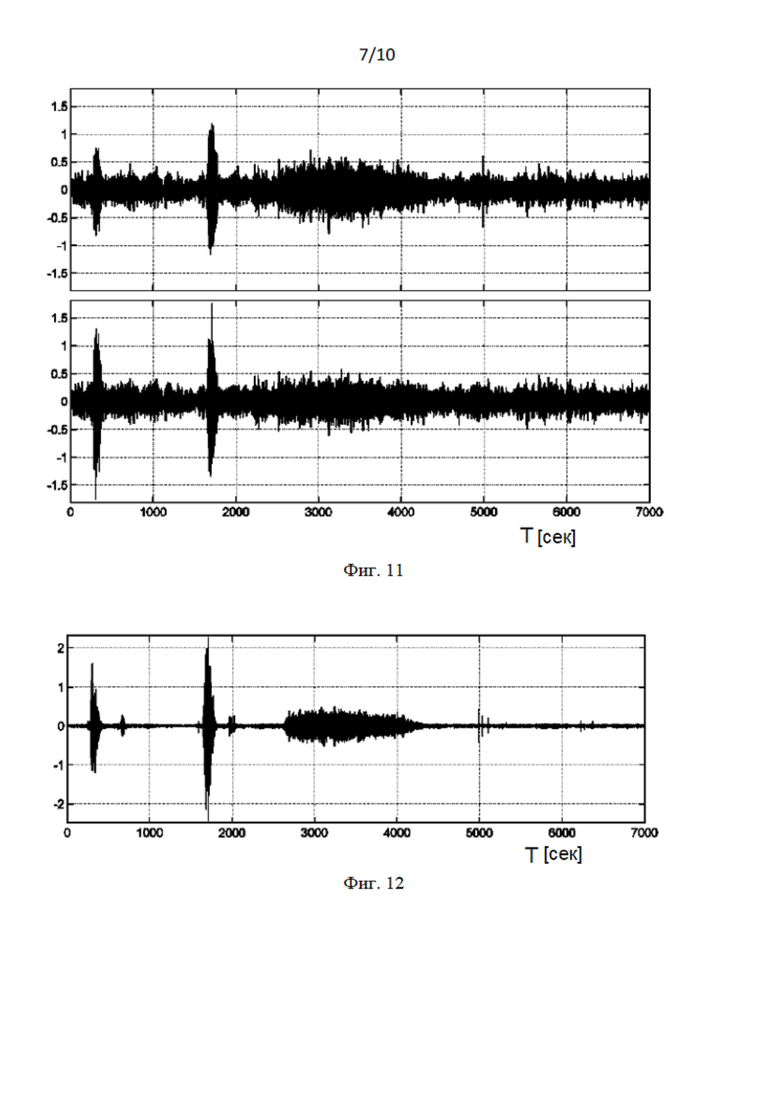
Фиг. 11 показывает пример сигналов звука, записанных для последовательности подготовки, выпуска и вдоха, «забитой» сильным шумом разговоров,
Фиг. 12 показывает версию сигналов звука по Фиг. 11 со сниженным шумом,
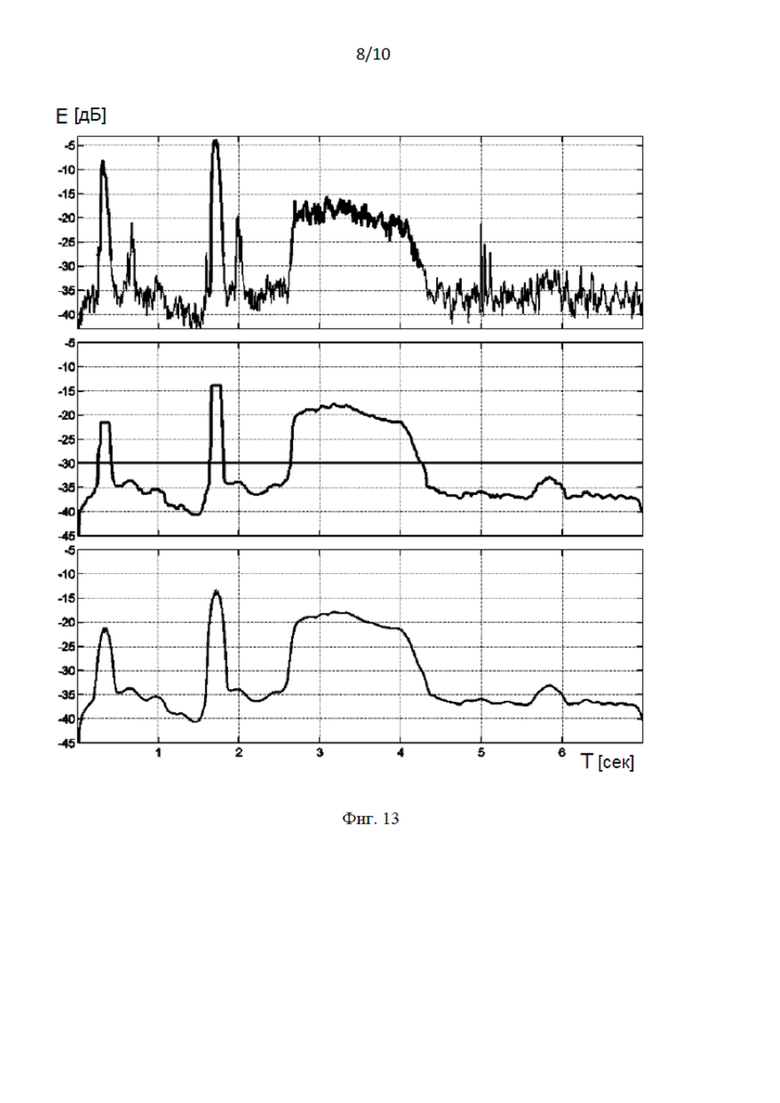
Фиг. 13 показывает определение пороговой величины и обнаружение времени начала/окончания, применяемых к сигналу по Фиг. 12,
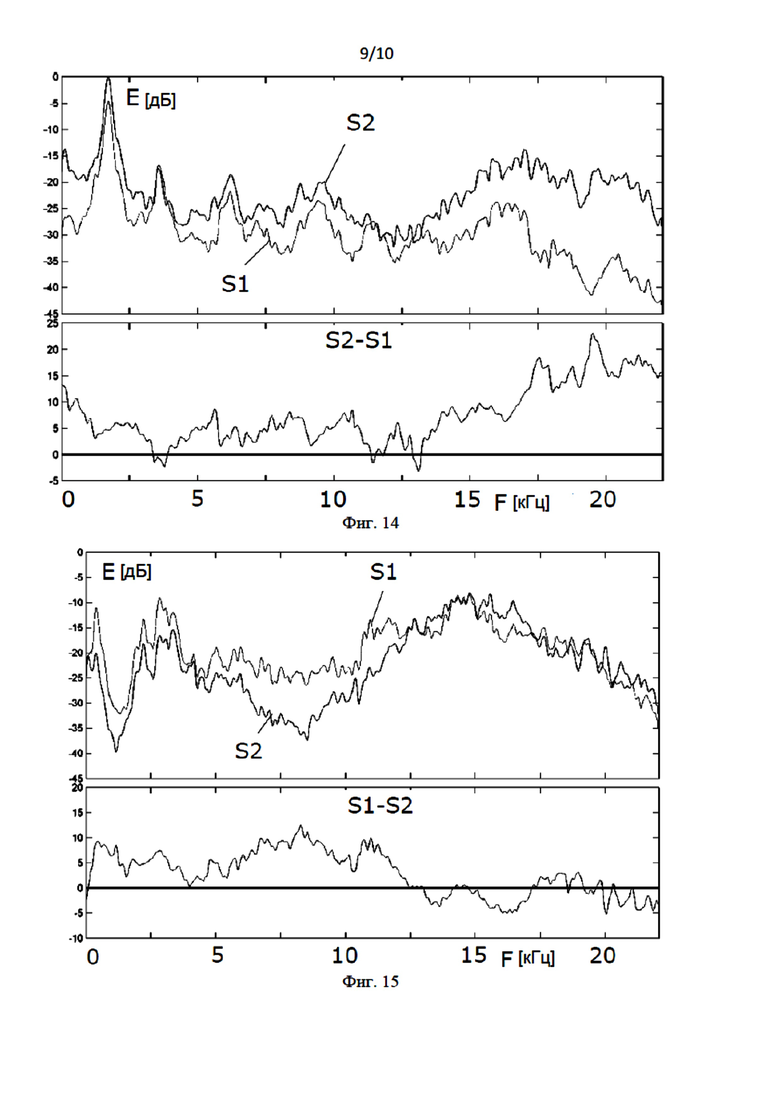
Фиг. 14 показывает примеры звука, уловленного для события подготовки: спектральные плотности мощности двух сигналов с микрофонов и их отличие,
Фиг. 15 показывает примеры звука, уловленного для события выпуска: спектральные плотности мощности двух сигналов с микрофонов и их отличие,
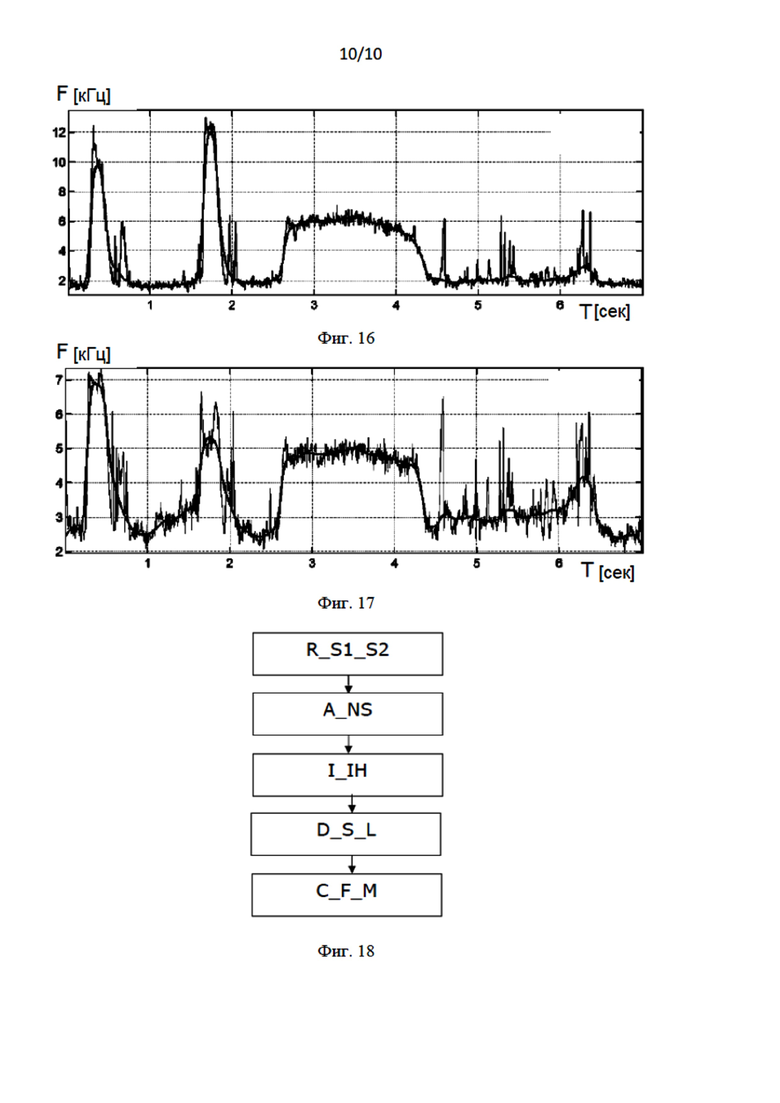
Фиг. 16 и 17 показывают спектральный центроид и спектральную ширину полосы, соответственно, вычисленный для примера звука по Фиг. 12,
Фиг. 18 показывает этапы варианта реализации способа.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Фиг. 1 показывает блок-схему основных частей варианта реализации системы ингалятора, содержащей ингалятор ДИ, два чувствительных элемента S1, S2, и блок, содержащий процессор P, выполненный с возможностью исполнения алгоритма с первым А1 и вторым А2 этапами алгоритма, что в результате приводит к выводу объемного расхода FR, например, среднего вдыхаемого потока во время вдоха. Следует понимать, что процессор P также может исполнять этап алгоритма (не показан), который сортирует обнаруженные события на: подготовку, выпуск и вдох.
Ингалятор содержит корпус Н, например пластмассовый корпус, внутри которого между впускным воздушным отверстием A_I в верхней части и выпускным воздушным отверстием A_O в нижней части образован проточный канал FP. Корпус H также содержит выдачное средство DP для выдачи дозы аэрозоля или порошка в прочный канал и, предпочтительно, отверстие, образующее впускное воздушное отверстие A_I, выполнено с возможностью приема емкости с пропеллентом. Пользователь вдыхает лекарственный препарат через выпускное воздушное отверстие A_O, которое может быть сформировано в виде мундштука.
Два чувствительных элемента S1, S2, предпочтительно выполненные в виде небольших микрофонов, расположены на наружной поверхности корпуса H разнесенными друг от друга (между центрами) на расстояние d с целью улавливания звука, возникающего в результате протекания воздуха в канале FP потока, обеспечивая, таким образом, возможность определения количественной характеристики потока в канале FP потока во время процедуры вдоха. Первый чувствительный элемент S1 расположен вблизи части корпуса Н с впускным воздушным отверстием A_I, а второй чувствительный элемент S2 расположен вблизи части корпуса Н с выпускным воздушным отверстием A_O. Предпочтительное расстояние d составляет по меньшей мере 1 см, например по меньшей мере 2 см, для обеспечения улавливания двумя микрофонами S1, S2 различных сигналов звука из шума в канале FP потока, т.е. за счет расположения за пределами и вблизи двух различных частей канала FP потока, но по-прежнему таким образом, что они по существу улавливают один и тот же фоновый шум. Для того чтобы это обеспечить, два микрофона S1, S2 предпочтительно выполнены обращенными в одном и том же направлении или расположенными на одной и той же стороне корпуса Н, для обеспечения одинакового влияния на них корпуса Н, образующего акустический экран. В зависимости от чувствительных элементов S1, S2, они могут быть присоединены, например съемным образом, к наружной поверхности корпуса Н или друг за другом, или устанавливаться на одной общей конструкции для фиксирования относительного расстояния d. Однако, в качестве альтернативы, чувствительные элементы S1, S2 могут быть прикреплены к корпусу Н без возможности отсоединения, например расположены в специально приспособленных конструкциях в форме монолитного тела на наружной части корпуса Н или на этих конструкциях.
Блок процессора, например смартфон, снабженный программным приложением, обеспечивающим возможность исполнения первого этапа А1 алгоритма, способного принимать данные, отображающие сигналы звука или вибрации, улавливаемые соответствующими первым и вторым чувствительными элементами S1, S2, проводным или беспроводным способом. Первый этап А1 алгоритма применяет алгоритм подавления шума для подавления фонового шума, захватываемого чувствительными элементами S1, S2, используя разницу между уловленными сигналами звука или вибрации с двух чувствительных элементов S1, S2. Подробности в отношении некоторых возможных реализаций А1 представлены далее. Выходные данные с первого этапа А1 алгоритма представляют собой уровень S_L звука или ряд уровней звука, измеренных во время процедуры вдоха, в которых фоновый шум был подавлен. Первый этап алгоритма может содержать этап алгоритма, предназначенный для обнаружения начала и окончания событий, относящихся к процедуре вдоха, в ответ на входные данные с двух чувствительных элементов S1, S2 для обеспечения возможности автоматического определения набора данных, к которым необходимо применить второй этап А2 алгоритма.
На втором этапе А2 алгоритма эти данные об уровне S_L звука преобразуются в соответствующий объемный расход FR, например, с помощью заранее заданной таблицы преобразования факторов конвертации между измеренными уровнями S_L звука и соответствующим образом измеренными объемным расходом FR для конкретной рассматриваемой конструкции ингалятора. В частности, было обнаружено, что предпочтительным является ограничение полосы улавливаемых сигналов звука до диапазона частот от 3 кГц до 6 кГц для обеспечения оптимального соответствия между измеренным звуком и потоком.
Для мониторинга правильного использования ингаляторов существует два важных варианта использования: 1) Выборочная проверка использования медицинским работником (устройство у специалиста) во время визитов пациента к медицинскому работнику, и 2) Продолжительное использование пациентом (устройство с отклонением) для предоставления обратной связи пациенту и/или медицинскому работнику.
Фиг. 2 показывает пример графика, отображающего событие выпуска с последующим вдохом, как функцию времени в форме звукового давления [дБ], измеренного для события F_S выпуска, и вдыхаемого потока [л/мин], измеренного для вдоха I_F. Начало T_FIO вдоха или длительность T_I вдоха представляют собой временные параметры, которые могут использоваться для характеристики процедуры вдоха. Предельные скорости для объемного расхода сильного вдоха составляют, как правило, 25 и 60 л/мин. Другим параметром, который может предоставить информацию медицинскому работнику, может быть средний объем QAVG процедуры вдоха. Данные параметры могут использоваться для предоставления обратной связи медицинскому работнику в отношении правильной работы и для объективного сравнения правильного использования.
Фиг. 3 показывает фотоснимок конкретного примера ингалятора с впускным воздушным отверстием в верхней части корпуса, в которое вставляется емкость CN с пропеллентом. Корпус содержит прямую трубчатую секцию с впускным воздушным отверстием на верхнем конце, а нижний конец прямой трубчатой секции соединен с мундштуком MP, образующим выходное воздушное отверстие, причем продольная ось мундштука наклонена относительно продольной оси трубчатой секции. Два небольших микрофона S1, S2 присоединены к наружной поверхности корпуса при испытательной наладке с помощью ленты. Первый микрофон S1 расположен на части прямой трубчатой секции на расстоянии, составляющем от 10 до 20% длины прямой трубчатой секции от ее верхнего конца, а второй микрофон S2 расположен на части прямой трубчатой секции от ее нижнего конца, а именно вблизи места соединения мундштука MP с прямой трубчатой секцией. Также можно видеть провода для соединения микрофонов S1, S2.
Показанные измеренные данные, о которых далее идет речь, измерены при испытательной наладке с двумя микрофонами S1, S2, показанными на Фиг. 3.
Фиг. 4 показывает записанный звуковой ответ SP в зависимости от времени двух микрофонов S1, S2 с выборкой на 44,1 кГц (верхний график), вместе с опорным сигналом потока (нижний график), показывающим соответствующую скорость F потока [л/мин]. Как можно видеть, это соответствует случаю, в котором вдох был выполнен с приблизительно от 55 до 60 /мин в течение периода, составляющего одну секунду (указанного вертикальными пунктирными линиями). Звук из верхнего микрофона S1, расположенного ближе к впускному воздушному отверстию, является более громким по сравнению со звуком из нижнего микрофона S2, расположенного ближе к мундштуку (не видно, поскольку два сигнала наложены). Кроме того, можно видеть, что амплитуда звука приблизительно следует за скоростью F.
Во время вдоха, воздух проходит через верхнюю часть ДИ, вызывая завихрения, которые могут быть измерены звуком. Поскольку микрофон S1 на верхней части ДИ расположен ближе к завихрениям по сравнению с нижним микрофоном S2, а мундштук охвачен ротовой полостью, нижний микрофон S2 захватывает существенно меньше звука по сравнению с верхним микрофоном S1. Данная разница уровня может быть использована для того, чтобы избавиться от фонового шума окружающей среды.
Фиг. 5 показывает измеренный уровень S_L звука [дБ], захваченный двумя микрофонами S1, S2 (отфильтрованный от 3 кГц и 6 кГц), отображенный в виде графика зависимости от скорости F потока [л/мин]. Как можно видеть, имеет место надежное соотношение поток-звук от 15 до 120 л/мин, которое является достаточным диапазоном для анализа потока во время вдоха и для вывода клинических параметров, как было описано выше. Например, это обеспечивает возможность установления таблицы преобразования один-к-одному или соответствия между измеренным уровнем звука (отфильтрованным от 3 кГц до 6 кГц) и потоком. Имея меньше 15 л/мин (что указано пунктирной вертикальной линией), невозможно достоверно определить поток на основе измеренного звука при настоящей испытательной наладке.
Фиг. 6 показывает формы кривой времени для звука, измеренного для событий выпуска (верхний график), а также для события подготовки (нижний график). Выпуск приводит к тому, что оба микрофона S1, S2 обладают примерно одинаковым количеством энергии в звуке (не видно), тогда как для подготовки имеет место разница между выходными данными из S1 и S2 (не видно). Эту разницу можно объяснить тем фактом, что для выпуска мундштук охватывается ротовой полостью, а сигнал на обоих S1 и S2 по существу очень похож. При подготовке, мундштук не охватывается ротовой полостью и S2, таким образом, улавливает наибольший уровень сигнала. Эта разница между выпуском и подготовкой обеспечивает разграничение между подготовкой и выпуском для вычисления улучшенных клинических параметров. Например, медицинский работник может видеть, была ли осуществлена подготовка надлежащим образом, если ингалятор не использовался на протяжении некоторого продолжительного времени.
Фиг. 7 показывает блок-диаграмму схемы для подавления фонового шума с двух микрофонов S1, S2, с получением, в результате, одного выходного сигнала FS с подавленным шумом. Блок-диаграмма по существу соответствует примеру контента первой части А1 алгоритма, описанной в отношении Фиг. 1. Фоновый шум может помешать измерениям, в частности, при измерении слабых потоков акустическим чувствительным элементом. Однако отделение шума и компонентов потока возможно, если два микрофона S1, S2 расположены близко к источнику (вблизи впускного воздушного отверстия и выпускного воздушного отверстия), и предполагая, что источники нежелательных шумов находятся (намного) дальше микрофонов S1, S2. Существует два основных отличия между источником звука в ближнем поле (звук, генерируемый потоком) и источником звука в дальнем поле в комнатной среде.
Уровни амплитуды, измеряемые микрофонами S1, S2, приблизительно одинаковы для микрофонов S1, S2 для источников звука в дальнем поле, тогда как уровни для источника в ближнем поле могут отличаться: микрофон, находящийся наиболее близко к источнику будет измерять наивысший уровень, чем тот, который находится дальше. Отличия уровней для ДИ составляют до 6 дБ для частот от 100 до 3000 Гц и потоков от 10 л/мин до 100 л/мин. В диапазоне частот от 3 до 6 кГц, разница в 6 дБ обозрима для потоков более 40 л/мин (см. Фиг. 5).
Для источника в ближнем поле будет иметь место задержка, если один из микрофонов находится ближе к источнику, чем другой. Средняя разница фаз для источника в дальнем поле в комнате за пределами радиуса реверберации будет равна нулю. Для более низких частот (в зависимости от расстояния между микрофонами) компоненты шума в двух сигналов с микрофонов будут выраженно коррелированы с равными магнитудами и различием нулевой фазы.
Оба различия могут быть использования для отделения источника в ближнем поле от источника в дальнем поле. Для событий, которые являются относительно выраженными в отношении фонового шума, таких как выпуск, подготовка и сильные вдохи, существенный шум уже удален путем вычитания двух сигналов с микрофонов. Вследствие выраженной корреляции, удаляется, в частности, низкочастотный фоновый шум. В частности, для вдохов требуется дополнительное подавление шума, особенно для обеспечения возможности точного измерения потока по меньшей мере в диапазоне от 25 до 60 л/мин.
Надежным способом является использование блока ABF адаптивного лучеформирователя (для более подробного описания см., например, ссылки на литературу, представленные выше). ABF «испускает луч» к звуку в ближнем поле (т.е. звуку потока) и имеет первые выходные данные, которые содержат сигнал FS1 с улучшенным соотношением сигнал-шум (ССШ) в отношении фонового шума, но по-прежнему содержит компонент шума. Это называется первичными выходными данными ABF. Вторые выходные данные из ABF представляют собой сигнал N, который почти не содержит звука потока, а только лишь шум. Он называется сигналом N фонового шума. В случае, если сигнал N фонового шума коррелируется с остаточным шумом в первичном сигнале, может быть использован адаптивный фильтр AF для оценки остаточного шума и вычитания его из сигнала FS1 с получением, таким образом, в результате выходных данных, которые могут использоваться в постпроцессоре PP, который также использует сигнал N фонового шума ABF для дополнительного подавления шума. Постпроцессор PP работает в спектральной области и известен для спектрального вычитания (см., например, ссылки на литературу, представленные выше). Требуется, чтобы ABF и AF были урегулированы, т.е. ABF должен приспосабливаться, если превосходит сигнал потока, тогда как AF должен приспосабливаться, если превосходит шум. Для того, чтобы это осуществить, был сконструирован детектор, использующий разницу амплитуд на микрофонах S1, S2: имеет место существенное различие, если превосходит сигнал потока, и почти никакого различия, если превосходит шум. Если детектор обнаруживает существенный сигнал потока, активируется приспособление ABF, а приспособление AF останавливается. В случае, если обнаружен только лишь фоновый шум, может приспосабливаться AF, а приспособление ABF останавливается.
Приспособление ABF является наиболее важным. В решениях для повышения разборчивости речи на верхней части детектора включения/выключения, описанного выше, из информации в постпроцессоре РР представляется возможным получить оценку ССШ на полосу частот и использовать данную информацию для регулирования скоростью приспособления на частоту, основываясь на зависимом от частоты ССШ. Поскольку источник звука находится в фиксированном положении относительно положений микрофонов, нет необходимости по меньшей мере в быстром приспособлении, и исследования показали, что для заданного устройства может быть достаточно первичной подготовки коэффициентов.
Было показано, что для получения уровня звука, который может быть преобразован в характеристику потока, отсутствует необходимость в том, чтобы брать всю ширину полосы частот, и полоса частот начиная от 3 кГц обеспечивает хорошие результаты корреляции, например, полоса от 3 до 6 кГц. Потоки ниже 15 л/мин (нижняя граница для правильного использования) могут быть точно измерены, если предварительная обработка используется до уровня фонового шума, составляющего 60 дБ(А). Для нижних фоновых уровней также могут быть измерены нижние величины потока, но в этом случае требуется только лишь указание на то, что вдох должен быть сильнее.
Далее представлено обоснование обнаружения и классификации звуков, связанных с использованием ДИ, для проверки, правильно ли используется ДИ. Прежде всего, желательно автоматически обнаруживать различные типы звуков (событий) ДИ: подготовку, выпуск и вдох.
Фиг. 8, 9 и 10 показывают примеры записанного звука с зависимостью от времени T двумя микрофонами S1, S2 для подготовки, выпуска и вдоха, соответственно. Звук с верхнего микрофона S1 показан на верхнем графике, а звук с нижнего микрофона S2 показан на нижнем графике. Как видно на Фиг. 8 и 9, в случае сигналов подготовки и выпуска, сперва имеет место относительно большой выброс сигнала, за которым следует малый выброс. Первый выброс генерируется надавливанием на емкость, а второй выброс генерируется ее отпусканием. Фиг. 10 показывает, что в сигналах вдоха сперва имеет место относительно большой выброс сигнала, за которым следует несколько коротких выбросов сигнала. Первый выброс происходит вследствие вдоха, тогда как малые выбросы происходят вследствие дребезжания (смесительного) шара в емкости, что вызвано движением ингалятора при его удалении от ротовой полости.
Фиг. 11 показывает записанный звук с зависимостью от времени для комбинированного события с подготовкой, запуском и вдохом, «забитый» шумом разговора, для верхнего микрофона S1 (верхний график) и для нижнего микрофона S2 (нижний график).
Под «обнаружением» понимается определение того, присутствуют ли события ДИ в заданной записи звука с двух микрофонов S1, S2, присоединенных к ингалятору, а также определение времени начала, времени окончания и длительностей этих событий. Во-вторых, желательно автоматически классифицировать обнаруженные события на классы: подготовка, выпуск и вдох. В сочетании с временем начала, временем окончания и длительностями событий ДИ, предоставленными на стадии обнаружения, может быть получена следующая дополнительная информация: 1) Порядок событий ДИ, 2) Длительность вдоха, 3) Время между выпуском и вдохом, такое как: a) время между (верхнее или концевое) выпуском и началом вдоха, b) преждевременное завершение вдоха после выпуска, c) выпуск после завершения вдоха, 4) выпуск во второй половине вдоха. Данная информация может быть использована в качестве входных данных для диагностических проверок и/или заключений. Например, может быть определено, выполнялись ли разграничения события в надлежащем порядке, был ли вдох достаточно долгим, и т.д. Очевидно, что информация также может быть использована для обнаружения долгосрочных тенденций о правильном использовании ДИ. Входные данные для алгоритма/способа события ДИ могут быть двумя сигналами микрофонов как таковыми, или выходными данными со стадии предварительной обработки для снижения шума, или их комбинацией. Уменьшение шума может выполняться или отдельно на каждом канале, или в нем могут использоваться сигналы микрофонов для создания одного улучшенного сигнала.
Фиг. 12 показывает пример одного сигнала с уменьшенным шумом, вычисленного в ответ на ввод звука с двух микрофонов S1, S2, показанный на Фиг. 11. Алгоритм основан на подходе со «скользящим окном». Прежде всего, для каждого окна малой продолжительности, положим от 10 до 20 мсек, вычисляются энергия, оконное преобразование Фурье (ОПФ) и некоторые характеристики, полученные из последнего. После этого, энергия и кривые характеристик в качестве функции индекса окна подвергаются постобработке посредством медианной фильтрации и сглаживания. Получаемая улучшенная энергия и кривые характеристик используются в качестве входных данных для текущего обнаружения и классификации. Предполагается, что компоненты (исходные или улучшенные) в записях с микрофона, имеющиеся по причине звукового шума или помех, являются в достаточной степени малыми, так что интересующие события ДИ поднимаются выше уровня шума. Очевидно, что это происходит на самом деле в примере записи с уменьшенным шумом, показанном на Фиг. 12, что далее также будет использовано в качестве примера.
Обнаружения событий ДИ может быть основано на определении пороговой величины улучшенной версии исходной кривой распределения энергии. Вместо энергии также может использоваться средняя абсолютная величина или некоторый другой энергоподобный сигнал. Время, в которое энергия событий ДИ поднимается выше уровня пороговой величины, определяет время начала, время окончания и длительности событий.
Фиг. 13 показывает результаты применения описанных выше этапов в отношении сигнала, показанного на Фиг. 12, на котором все энергии E выражены в дБ и построены на графике с зависимостью от времени T. Верхний график показывает энергию, вычисленную из сигнала на Фиг. 12, в качестве функции индекса окна. График посередине показывает результат фильтрации данного сигнала энергии, основанного на окне, с помощью медианного фильтра. Данный сигнал обозначен E(k), где k представляет собой индекс окна. Наконец, выходные данные E(k) медианного фильтра сглаживаются с помощью фильтра нижних частот (ФНЧ), выходные данные которого показаны на нижнем графике Фиг. 13.
Обнаружение событий ДИ может выполняться путем определения пороговой величины кривой E(k) распределения энергии, пропущенной через медианный фильтр, на графике посередине, или кривой на нижнем графике, которая представляет собой версию кривой, пропущенную через фильтр нижних частот, на графике посередине. Время, в которое данный сигнал поднимается выше поровой величины, определяет время начала, время окончания и длительности событий ДИ. Пороговая величина показана тонкой черной линией на графике посередине (на -30 дБ) и определяется динамически из данных следующим образом. Положим, что E_dB(k) является E(k), что выражается в дБ, т.е. E_dB(k) = 10*log10(E(k)). В дополнение, положим, что E_prct(p) является p-м процентилем E_dB(k), т.е. значением, ниже которого находится p процентов значений E_dB(k). Затем пороговая величина для обнаружения событий ДИ в E_dB(k) определяется следующим образом:
E_thr = max((1-c) *E_prct(p_min) + c*E_prct(p_max), q)
где p_min является нижним процентилем, положим, от 0 до 5 %, а
p_max является верхним процентилем, положим, от 95 до 100 %.
Постоянная величина c может быть выбрана в диапазоне от 0,2 до 0,7. В качестве примера, была использована c=0,4. Постоянная величина q задает минимум на E_thr. Пороговая величина E_thr показана горизонтальной черной линией на графике посередине на Фиг. 13. Части, которые поднимаются выше пороговой величины, определяют выявленные события ДИ. Левая и правая части каждой из этих частей определяют время начала и окончания, соответственно, соответствующего события ДИ. Сигнал на нижнем графике используется для выявления пиков в сегментах, которые были идентифицированы на предыдущем этапе и соответствуют подготовке или выпуску. Расположения этих пиков могут быть использованы для вычисления времени.
С целью классификации обнаруженных событий на: подготовку, выпуск и вдох, может быть использован двухэтапный подход. Сначала выполняется разграничение между подготовкой и выпуском с одной стороны, и вдохом с другой стороны. Это может быть выполнено на основе параметра длительности, которая получена исходя из времени начала и окончания события(событий). Длительности как подготовки, так и выпуска, являются намного меньшими, чем длительность вдоха. Подготовка и выпуск в целом занимают менее 300 мсек, тогда как даже короткие вдохи занимают более 500 мсек. Таким образом, данный показатель длительности используется для отделения подготовки от выпуска с одной стороны, и вдоха (и выдохов) с другой. Следует отметить, что на практике выходные данные блок-диаграммы на Фиг. 7 могут использоваться для обнаружения вдоха и (возможно, отдельно предварительно обработанных) сигналов микрофона для обнаружения подготовки и выпуска. Второй этап предназначен для разграничения между подготовкой и выпуском. Для достижения этого возможно использовать тот факт, что различия мощностей между двумя записями с микрофонов отличаются для двух событий ДИ, но вместо этого, или в дополнение, возможно использовать свойства, присущие сигналам соответствующих событий.
Фиг. 14 показывает энергию Е звука [дБ] для события подготовки с зависимостью от частоты F для обоих микрофонов S1, S2. Энергия сигнала нижнего микрофона S2 является существенно большей, чем таковая сигнала верхнего микрофона S1 во всем широком диапазоне частот. Нижний график на Фиг. 14 показывает результат вычитания S1 из S2.
Фиг. 15 показывает энергию Е звука [дБ] для события выпуска с зависимостью от частоты F для обоих микрофонов S1, S2. Здесь энергия сигнала нижнего микрофона S2 меньше, чем таковая сигнала верхнего микрофона S1 во всем широком диапазоне частот. Нижний график на Фиг. 15 показывает результат вычитания S2 из S1.
Вышеуказанные особенности обеспечивают простое разграничение выпуска и подготовки с помощью соотношений. Например, для каждого обнаруженного события, являющегося подготовкой или выпуском, соотношение между энергией сигналов верхнего и нижнего чувствительных элементов может быть вычислено с использованием только лишь части сигналов в обнаруженном интервале, во время которого происходит событие (две части слева на графиках посередине и вверху на Фиг. 13). Если данное соотношение больше, чем некоторая пороговая величина, событие соответствует выпуску, а если оно меньше, это соответствует подготовке.
В результате анализа спектрограмм выпуска, основные резонансные частоты со временем изменяются. В частности, они становятся меньше с течением времени. С другой стороны, из спектрограмм подготовки можно видеть, что основные резонансные частоты являются постоянными. Это различие может быть использовано несколькими путями: 1) Для каждого события возможно вычислить различие между (нормализованным) спектром сразу после его начала и (нормализованным) спектром сразу после его окончания, и нормализовать это (например, со средним значением этих двух спектров). Поскольку спектр для выпуска существенно изменяется со временем, тогда как спектр для подготовки изменяется намного меньше, (нормализованное) различие для выпуска больше, чем для подготовки. 2) Могут быть обнаружены спектральные пики для каждого окна в событии ДИ, например, с помощью LPC (Linear predictive coding, кодирование с линейным предсказанием), и выполнена проверка, насколько они изменяются со временем. Изменение выпуска больше, чем для подготовки.
Существуют несколько других особенностей, которые могут быть использованы для различия подготовки от выпуска, например, спектральный центроид, спектральная ширина полосы или спектральная медианная частота. Спектральный центроид и ширина полосы сигнала на Фиг. 12 показаны на Фиг. 16 и 17, соответственно. Можно наблюдать следующие свойства: 1) Спектральный центроид для выпуска больше, чем для подготовки, 2) Спектральная ширина полосы для выпуска меньше, чем для подготовки. В дополнение, как спектральный центроид, так и спектральная ширина полосы, также могут быть использованы (по отдельности или в комбинации с энергией) в качестве входных сигналов в алгоритме на стадии обнаружения, поскольку они явным образом показывают, где находятся события ДИ во времени.
Все вышеописанные особенности могут быть использованы одновременно в блоке классификации, таком как дерево решений, метод опорных векторов и т.д.
Фиг. 18 показывает пример этапов варианта реализации способа. Сперва, принимаются R_S1_S2 сигналы или сигналы, представляющие данные, с двух чувствительных элементов. Затем применяется A_NS алгоритм подавления шума с использованием отличия между обнаруженными сигналами с двух разнесенных друг от друга чувствительных элементов с получением, в результате, одного канального сигнала. Один канальный сигнал анализируется I_IH для идентификации времени начала и окончания события вдоха. На основании этого, анализируется событие вдоха для определения D_S_L уровня звука или рядов уровней звука, во время события вдоха, и наконец, эти ряды уровней звука конвертируются C_F_M в характеристику потока, например, скорость потока или ряд скоростей потока. Дальнейшим этапом может быть сравнение характеристики потока с опорной или пороговой величиной для определения, находится ли вдох в пределах заранее определенной границы, или же является слишком сильным или слишком слабым.
Подводя итог, изобретением предусмотрен ингалятор с корпусом, содержащим впускное воздушное отверстие и выпускное воздушное отверстие. Внутри корпуса между впускным воздушным отверстием и выпускным воздушным отверстием определен прочный канал, причем в прочном канале расположено выдачное или раздаточное средство, выполненное с возможностью выдачи аэрозоля или сухого порошка. Два чувствительных элемента, например микрофона, расположены в разнесении друг от друга на наружных поверхностях корпуса для обнаружения звука или вибраций, исходящих от потока в прочном канале в двух различных положениях. Это обеспечивает возможность точного обнаружения скорости потока во время вдоха на основе звука или вибраций, обнаруженными двумя чувствительными элементами, обеспечивая, таким образом, возможность проверку правильности использования ингалятора. Кроме того, использование двух разнесенных друг от друга чувствительных элементов облегчает идентификацию событий подготовки и выпуска в обнаруженном звуке или вибрациях, что также может быть использовано при оценке использования ингалятора. Предпочтительно, используется алгоритм подавления шума, в котором используются отличия в уловленном звуке или вибрациях с двух чувствительных элементов, для обеспечения возможности точных измерений потока даже в шумной окружающей среде.
Несмотря на то что изобретение было показано и описано подробно на чертежах и в вышеизложенном описании, такую иллюстрацию и описание следует считать иллюстративными или приведенными в качестве примера, и не ограничивающими; изобретение не ограничено раскрытыми вариантами реализации. Другие вариации раскрытых вариантов реализации могут быть понятны и осуществлены специалистом в области техники, к которой относится заявленное изобретение, после изучения чертежей, раскрытия и прилагаемой формулы изобретения. В формуле изобретения термин «содержащий» не исключает других элементов или этапов, а неопределенный артикль «a» или «an» не исключает множества. Один процессор или другой блок может выполнять функции нескольких элементов, указанных в формуле изобретения. Простой факт того, что некоторые результаты измерений указаны во взаимно отличающихся зависимых пунктах не говорит о том, что комбинация этих результатов измерений не может использоваться в качестве преимущества. Компьютерная программа может быть сохранена/распространена на подходящем носителе информации, таком как оптический или твердотельный носитель информации, которые поставляются вместе или как часть других аппаратных средств, но может также быть распространена другими способами, например, через сеть Интернет или с помощью других проводных или беспроводных телекоммуникационных систем. Все ссылочные обозначения в формуле изобретения не должны рассматриваться как ограничивающие ее объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНГАЛЯТОР | 2012 |
|
RU2591625C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОТОКА В ИНГАЛЯТОРЕ, ИНГАЛЯТОР И СИСТЕМА | 2017 |
|
RU2751814C2 |
| ИНГАЛЯТОР С НАПРАВЛЕННЫМ ДАТЧИКОМ ПОТОКА | 2005 |
|
RU2372105C2 |
| ИНТЕРАКТИВНОЕ УСТРОЙСТВО И СПОСОБ ПРОФИЛИРОВАНИЯ УСИЛИЙ ПРИ ИНГАЛЯЦИИ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2009 |
|
RU2470681C2 |
| РЕГУЛИРОВАНИЕ ПОДАЧИ ГАЗА ИЛИ ЛЕКАРСТВЕННОГО ПРЕПАРАТА ПАЦИЕНТУ | 1997 |
|
RU2197281C2 |
| ИНТЕРАКТИВНОЕ УСТРОЙСТВО И СПОСОБ ПРОФИЛИРОВАНИЯ УСИЛИЙ ПРИ ИНГАЛЯЦИИ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2012 |
|
RU2618931C2 |
| ПОВЫШЕНИЕ РАЗБОРЧИВОСТИ РЕЧИ С ИСПОЛЬЗОВАНИЕМ НЕСКОЛЬКИХ МИКРОФОНОВ НА НЕСКОЛЬКИХ УСТРОЙСТВАХ | 2009 |
|
RU2456701C2 |
| ОПОВЕЩЕНИЕ ПОЛЬЗОВАТЕЛЯ О ПРИКРЫТИИ МИКРОФОНА | 2009 |
|
RU2449497C1 |
| ПОДАВЛЕНИЕ ШУМОВ С ИСПОЛЬЗОВАНИЕМ СЕГМЕНТИРОВАННОГО, ЧАСТОТНО-ЗАВИСИМОГО ФАЗОВОГО ПОДАВЛЕНИЯ | 2018 |
|
RU2837777C2 |
| УСТРОЙСТВО ДЛЯ ИНГАЛЯЦИИ И СПОСОБ ИНГАЛЯЦИИ | 1998 |
|
RU2207886C2 |
Группа изобретений относится к медицинской технике. Система для оценки потока в ингаляторе содержит ингалятор для выдачи аэрозоля или сухого порошка. Ингалятор содержит корпус, первый чувствительный элемент, расположенный в первом положении наружной поверхности корпуса, и второй чувствительный элемент, расположенный во втором положении наружной поверхности корпуса. Чувствительные элементы выполнены с возможностью обнаружения звука или вибраций, исходящих от потока в проточном канале ингалятора. Процессор выполнен с возможностью обработки выходных сигналов от чувствительных элементов с выработкой характеристики потока в проточном канале. Первое и второе положения разнесены друг от друга. Первое положение выбрано так, чтобы находиться на меньшем расстоянии от впускного воздушного отверстия, чем второе положение. Процессор выполнен с возможностью классификации событий за счет анализа звука или вибраций, обнаруженных первым и вторым чувствительными элементами с обеспечением идентификации события подготовки, события выпуска и события вдоха, и разграничения между событиями подготовки и выпуска, с одной стороны, и событием вдоха, с другой стороны, основываясь на параметре длительности, полученном исходя из времени начала и окончания событий, и разграничения между событием подготовки, с одной стороны, и событием выпуска, с другой стороны, основываясь на отличиях мощностей звука или вибраций, обнаруженных первым и вторым чувствительными элементами. Раскрыты способ оценки потока в ингаляторе и машиночитаемый носитель, на котором хранится компьютерная программа, содержащая средство программного кода, сконфигурированный для выполнения процессором этапов способа. Технический результат состоит в обеспечении определения объемного расхода потока в ингаляторе на вдохе и выдохе. 3 н. и 12 з.п. ф-лы, 18 ил.
1. Система для оценки потока в ингаляторе, содержащая:
- ингалятор для выдачи аэрозоля или сухого порошка, содержащий:
- корпус (Н), содержащий впускное воздушное отверстие (A_I) и выпускное воздушное отверстие (А_O), между которыми в корпусе (Н) образован проточный канал (FP), и
- первый чувствительный элемент (S1), расположенный в первом положении наружной поверхности корпуса (Н), и второй чувствительный элемент (S2), расположенный во втором положении наружной поверхности корпуса (Н), и при этом первый и второй чувствительные элементы (S1, S2) выполнены с возможностью обнаружения звука или вибраций, исходящих от потока в проточном канале (FP), и
- процессор (Р), выполненный с возможностью обработки выходных сигналов от первого и второго чувствительных элементов (S1, S2) с выработкой характеристики потока (FR) в проточном канале,
отличающаяся тем, что:
первое и второе положения разнесены друг от друга, при этом первое положение выбрано так, чтобы находиться на меньшем расстоянии от впускного воздушного отверстия (A_I), чем второе положение, и
причем процессор выполнен с возможностью классификации событий за счет анализа звука или вибраций, обнаруженных первым и вторым чувствительными элементами (S1, S2) с обеспечением идентификации по меньшей мере одного события подготовки, события выпуска и события вдоха, и
разграничения между событиями подготовки и выпуска, с одной стороны, и событием вдоха, с другой стороны, основываясь на параметре длительности, полученном исходя из времени начала и окончания событий, и разграничения между событием подготовки, с одной стороны, и событием выпуска, с другой стороны, основываясь на отличиях мощностей звука или вибраций, обнаруженных первым и вторым чувствительными элементами (S1, S2).
2. Система по п. 1, в которой процессор выполнен с возможностью выработки характеристики потока в ответ на выходные сигналы от первого и второго чувствительных элементов (S1, S2) в ограниченном диапазоне частот.
3. Система по п. 1, в которой процессор выполнен с возможностью реализации алгоритма подавления шума для подавления нежелательного фонового шума путем использования разницы звука или вибраций, обнаруженных первым и вторым чувствительными элементами (S1, S2).
4. Система по п. 3, в которой процессор выполнен с возможностью осуществления адаптивного формирования луча (ABF) для выработки первых выходных данных (FS1), отображающих первый сигнал подавленного шума.
5. Система по п. 3, в которой процессор выполнен с возможностью вычисления уровня (S_L) звука или вибраций в ответ на выходные данные от указанного алгоритма подавления шума и преобразования указанного уровня (S_L) звука или вибраций в указанную характеристику (FR) потока.
6. Система по п. 1, в которой корпус (Н) содержит трубчатую секцию с впускным воздушным отверстием (A_I) на верхнем конце и в которой нижний конец прямой трубчатой секции соединен с мундштуком (MP), образуя выпускное воздушное отверстие (А_O).
7. Система по п. 6, в которой первое положение выбрано так, чтобы находиться на части трубчатой секции на расстоянии менее 30% длины трубчатой секции от ее верхнего конца.
8. Система по п. 6, в которой второе положение выбрано так, чтобы находиться на части трубчатой секции на расстоянии менее 30% длины трубчатой секции от ее нижнего конца.
9. Система по п. 1, в которой первый и второй чувствительные элементы (S1, S2) установлены на конструкции, которая выполнена с возможностью обеспечения пользователю возможности присоединения конструкции к указанному корпусу (Н) и отсоединения от него.
10. Система по п. 1, в которой первый и второй чувствительные элементы (S1, S2) установлены на соответствующих отдельных конструкциях, которые выполнены с возможностью обеспечения пользователю возможности присоединения конструкций к указанному корпусу (Н) и отсоединения от него.
11. Система по п. 1, в которой процессор (Р) расположен в отдельном от ингалятора блоке.
12. Система по п. 1, в которой процессор (Р) включен в дополнительную конструкцию, выполненную с возможностью присоединения к корпусу ингалятора и отсоединения от него пользователем без использования инструмента.
13. Система по п. 1, в которой второе положение выбрано так, чтобы находиться на меньшем расстоянии от выпускного воздушного отверстия (А_O), чем первое положение.
14. Способ оценки потока в ингаляторе, содержащем корпус (Н), в котором между впускным воздушным отверстием (A_I) и выпускным воздушным отверстием (А_O) образован проточный канал (FP), при этом способ включает:
- прием (R_S1_S2) первых данных, отображающих звук или вибрации, обнаруженные первым чувствительным элементом (S1) в первом положении наружной поверхности корпуса (Н),
- прием (R_S1_S2) вторых данных, отображающих звук или вибрации, обнаруженные вторым чувствительным элементом (S2) во втором положении наружной поверхности корпуса (Н), причем первое и второе положения разнесены друг от друга, а первое положение выбрано так, чтобы находиться на меньшем расстоянии от впускного воздушного отверстия (A_I), чем второе положение, и
- вычисление (C_F_M) характеристики потока в проточном канале (FP) путем обработки в процессоре (Р) первых и вторых данных в соответствии с алгоритмом (А1, А2),
- идентификацию по меньшей мере одного события путем анализа первых и вторых данных с обеспечением возможности идентификации события подготовки, события выпуска и события вдоха, и
причем разграничение между событиями подготовки и выпуска, с одной стороны, и событием вдоха, с другой стороны, основано на параметре длительности, полученном исходя из времени начала и окончания событий, и при этом разграничение между событием подготовки, с одной стороны, и событием выпуска, с другой стороны, основано на отличиях мощностей между первыми и вторыми данными.
15. Машиночитаемый носитель, на котором хранится компьютерная программа, содержащая средство программного кода, сконфигурированный для выполнения процессором этапов способа по п. 14, когда упомянутая компьютерная программа выполняется с использованием процессора.

