Изобретение относится к области получения топографической информации о рельефе земной поверхности и расположенных на ней объектах с использованием данных аэрофотосъемки и данных лазерного сканирования местности с борта воздушного судна, в частности к мониторингу участков трассы магистрального нефтепровода (МН) надземной и подземной прокладки со сложными геологическими условиями для выявления и отслеживания участков трассы с признаками экзогенных геологических процессов (ЭГП) и фиксации их границ, в том числе выходящих за пределы трассы МН и скрытых растительностью.
Известен способ создания ортофотопланов по материалам аэровидеосъемки [патент на изобретение RU 2235292 С2, опубл. 27.08.2004, МПК: G01C 11/30], который включает выполнение аэровидеосъемки, преобразование аналогового видеофильма в цифровой вид или запись цифрового видеофильма на компьютер и создание электронного накидного монтажа. После этого проводят редактирование электронного накидного монтажа и проектирование блоков фототриангуляции, измерение стереопар и отбраковку ошибочных данных, построение и уравнивание блоков фототриангуляции, регистрацию снимков, формирование ортофотоизображений и монтаж ортофотопланов. Электронный накидной монтаж создают путем ориентирования очередного кадра относительно всех перекрывающихся и ранее обработанных изображений. Проектирование блоков фототриангуляции выполняют автоматически с использованием всех геометрических связей, удовлетворяющих заданным критериям. Построение и уравнивание блоков фототриангуляции выполняют с автоматической отбраковкой ошибочных данных.
Известен также способ диагностики состояния продуктопроводов [патент на изобретение RU 2281534 С1, опубл. 10.08.2006, МПК: G01V 8/00], при котором выполняют сканирование территории продуктопровода посредством тепловизионной и визуальной съемок тепловизионными камерами с летательного аппарата, лазерное пространственное сканирование местности на территории продуктопровода, текущее позиционирование летательного аппарата пилотажно-навигационными средствами, фиксацию данных тепловизионной и визуальной съемок и лазерного пространственного сканирования местности с привязкой к данным текущего позиционирования летательного аппарата, формирование комплексной модели теплового и визуального изображения поверхности территории продуктопровода и интерпретацию данных изображения поверхности территории продуктопровода. Сканирование территории продуктопровода посредством тепловизионной и визуальной съемок осуществляют циклическим поворотом направления оптической визуализации относительно оси, расположенной перпендикулярно направлению полета. Регистрацию данных осуществляют дискретно в покадровом режиме в моменты вертикального положения оптических осей камер командой блока формирования цифровой и топологической модели рельефа.
Наиболее близким аналогом заявленного изобретения является способ формирования цифровой модели рельефа местности и/или ортофотоплана [патент на изобретение RU 2216711 С1, опубл. 20.11.2003, МПК: G01C 11/00, G03B 37/00], заключающийся в том, что осуществляют цифровым фотоаппаратом аэрофотосъемку местности и формируют цифровые снимки, определяют пилотажно-навигационные данные авиационного носителя, на котором установлен цифровой аппарат, в виде его координат в момент проведения аэрофотосъемки и формируют ортофотоплан. Одновременно с аэрофотосъемкой осуществляют сканирование местности лазерным лучом, формируют первую цифровую модель рельефа (ЦМР) по полученным данным лазерного сканирования. Из полученного множества точек лазерного сканирования выделяют точки, относящиеся к благоприятным областям по заданной достоверности. По полученной первой ЦМР и данным точек, относящихся к благоприятным областям, формируют топологическую модель рельефа, осуществляют выделение точек топологической модели в системе координат каждого цифрового снимка с получением на нем данных о благоприятных областях. Затем разбивают все указанные цифровые снимки по парам, подлежащим взаимному ориентированию с образованием стереопар, и формируют стереомодели путем определения соответственных точек в благоприятных областях каждого из цифровых снимков указанных стереопар. Осуществляют коррекцию внешнего ориентирования стереомодели по данным сформированной топологической модели. В результате с учетом полученных данных формируют ортофотоплан.
Недостатком наиболее близкого аналога является отсутствие возможности построения карты уклонов местности и определения по ЦМР, карте уклонов и ортофотоплану проявлений ЭГП, выделения их местоположения и границ.
Задачей заявленного изобретения является надежное выявление ЭГП на трассе МН и фиксация их границ.
Техническим результатом, достигаемым при использовании заявленного изобретения, является повышение точности выявления и определения расположения ЭГП для построения карты ЭГП местности вдоль трассы МН при сокращении трудоемкости и сроков проведения обследований.
Указанная задача решается, а технический результат достигается тем, что в способе построения карты ЭГП местности вдоль трассы МН выполняют цифровую аэрофотосъемку и воздушное лазерное сканирование местности вдоль трассы МН с борта воздушного судна для получения массива точек лазерных отражений и цифровых аэрофотоснимков местности, одновременно с цифровой аэрофотосъемкой и воздушным лазерным сканированием осуществляют сбор и запись навигационных данных, полученных от наземной навигационной системы, бортовой навигационной системы воздушного судна и инерциальной навигационной системы лазерного сканера для формирования и записи координат точек траектории полета, выполняют обработку данных воздушного лазерного сканирования и по результатам обработки и сформированным координатам точек траектории полета получают облако точек лазерных отражений, на основании автоматизированной классификации которых строят цифровую модель рельефа местности, проводят интерактивную коррекцию результатов автоматизированной классификации и осуществляют запись скорректированной цифровой модели рельефа, передают данные о цифровой модели рельефа в блок построения производных поверхностей углов наклонов и формируют карту уклонов местности, одновременно с построением цифровой модели рельефа проводят обработку данных цифровой аэрофотосъемки: осуществляют подбор исходных нетрансформированных снимков, выполняют тоновое выравнивание последних и ортотрансформирование выравненных по тону снимков согласно рельефу местности с формированием ортофотоплана местности, используя результаты построения цифровой модели рельефа, карты уклонов и ортофотоплана местности, осуществляют выявление и определение границ экзогенных геологических процессов (ЭГП), протекающих на местности вдоль трассы МН, на основании выбора предварительно сохраненных эталонов ЭГП и сравнения их с результатами построения и по выявленным границам ЭГП осуществляют формирование карты ЭГП местности вдоль трассы МН.
Изобретение поясняется чертежом, на котором представлена блок-схема заявленного способа построения карты ЭГП местности вдоль трассы МН и позициями обозначены:
1 - цифровая аэрофотосъемка;
2 - навигация;
3 - воздушное лазерное сканирование;
4 - обработка данных воздушного лазерного сканирования;
5 - обработка данных цифровой аэрофотосъемки;
6 - хранение эталонов ЭГП;
7 - выбор эталонов ЭГП;
8 - сравнение результатов обработки ВЛС и ЦАФС с эталонами ЭГП;
9 - формирование карты ЭГП;
Работы по проведению воздушного лазерного сканирования (ВЛС) и цифровой аэрофотосъемки (ЦАФС) осуществляются при выполнении инженерных изысканий для проектирования и строительства объектов МН (линейной части, включая участки переходов через естественные и искусственные препятствия, площадок нефтеперекачивающих станций) с целью получения актуальной картографической информации о рельефе и объектах местности для выявления и отслеживания ранее выявленных участков трассы с признаками ЭГП.
Заявленный способ построения карты ЭГП местности вдоль трассы МН осуществляют следующим образом.
Выявление и фиксация границ ЭГП на трассе МН включает выполнение работ по воздушному лазерному сканированию (3) с получением облака точек лазерных отражений и цифровой аэрофотосъемке (1) с получением цифровых аэрофотоснимков, определение текущих координат авианосителя (2), рассчитанных на основе одновременных измерений наземных станций ГЛОНАСС/GPS, бортового комплекса ГЛОНАСС/GPS и инерциальной системы, камеральную обработку по созданию цифрового ортофотоплана (5), цифровой модели рельефа (4), производных от нее поверхностей углов наклонов, а также дешифрирование полученных в результате камеральной обработки материалов. Согласно изобретению дешифрирование осуществляется в условиях комплексного анализа полученных в результате камеральной обработки данных на основе разработанных эталонов: с использованием результатов построения цифровой модели рельефа, карты уклонов и ортофотоплана местности осуществляется выявление экзогенных геологических процессов (ЭГП), протекающих на местности вдоль трассы МН, на основании выбора (7) предварительно сохраненных (6) эталонов ЭГП и сравнения (8) их с результатами построения, на основании выявленных ЭГП осуществляют формирование (9) карты ЭГП местности вдоль трассы МН.
Посредством монтированного на борту летательного аппарата (самолет, вертолет) аэросъемочного оборудования, включающего аэрофотокамеру, воздушный лазерный сканер (LIDAR) и антенну и приемник ГЛОНАСС/GPS, выполняется аэрофотосъемка местности. Параметры аэрофотосъемки должны удовлетворять требованиям построения ортофотопланов масштаба 1:2000 или крупнее, плотность точек лазерных отражений должна быть не менее 4 точек на 1 кв.м, разрешение аэрофотоснимков - не менее 8 см на пиксел, разрешение тепловизионных изображений - не менее 1 м на пиксел.
Дешифрирование материалов воздушного лазерного сканирования - достаточно новый метод обследования трубопроводов на предмет мерзлотной оценки, мало используемый для исследований криолиотозоны. Получаемые при этом материалы и их обработка дают информацию, которая отсутствует на цифровых ортофотопланах. Например, на картах уклонов (КУ) и цифровой модели рельефа уверено фиксируются полигональные или выпуклые мерзлотные формы, покрытые лесом.
Преимуществами воздушного лазерного сканирования являются:
- дистанционное и автоматизированное получение информации;
- высокая плановая и вертикальная точность определения положения точек лазерных отражений (ТЛО);
- получение данных о рельефе на залесенных территориях.
С появлением систем глобального геопозиционирования (ГЛОНАСС, GPS) появилась возможность точной геопривязки данных, получаемых с борта воздушного судна. Улучшение точностных параметров лазерных дальнометрических и инерциальных систем привело к возможности определения координат точек земной поверхности непосредственным измерением, с использованием мультисенсорных приборов - воздушных лазерных сканеров.
Воздушное лазерное сканирование направлено на получение трехмерных координат объектов с помощью измерений LIDAR-систем, применяющих технологию получения и обработки информации об удаленных объектах с помощью активных оптических систем, использующих явления отражения света и его рассеяния в прозрачных и полупрозрачных средах. Установленный на воздушном судне (самолете, вертолете) импульсный лазерный сканер проводит дискретное сканирование поверхности земли и объектов, расположенных на ней, регистрируя направление лазерного луча и время прохождения импульса с момента его испускания до приема после отражения от земной поверхности.
В процессе выполнения аэросъемочного полета сканер за счет прямолинейного движения воздушного судна и вращения в поперечном направлении зеркала сенсорного блока производит обзор подстилающей поверхности, излучая в ее направлении мощные и короткие оптические (лазерные) импульсы. Работа лазерного сканера основана на измерении наклонной дальности D от источника излучения (лазера) до наземного объекта, являющегося препятствием на пути распространения лазерного луча. Такое препятствие вызывает появление отраженного импульса, который будет зарегистрирован оптическим фотоприемным устройством сканера, а по времени задержки от момента излучения зондирующего импульса до регистрации отраженного импульса, принимая во внимание постоянство скорости распространения электромагнитных колебаний (скорости света), можно определить дальность D. Одновременно с инерциальной системой, измерительный сенсор которой жестко связан с оптико-механическим устройством сканера, определяются углы ориентации зондирующего луча и координаты пространственного положения носителя за счет использования бортового приемника глобальной навигационной спутниковой системы (ГЛОНАСС/GPS), работающего в дифференциальном режиме измерений, который одновременно с приемником ГЛОНАСС/GPS, установленным на базовой станции, принимает навигационную информацию. Инерциальный сенсор размещен внутри корпуса сканирующей системы, параметры внутреннего взаиморасположения (оффсет-параметры) определены изготовителем аппаратуры и используются штатным программным обеспечением обработки данных, входящим в комплект системы. Антенна встроенного в сканер приемника ГЛОНАСС/GPS размещена в верхней части фюзеляжа воздушного судна, ее положение относительно сканера неизменно на протяжении всего времени выполнения проекта.
Знание параметров внешнего ориентирования и расстояния позволяет математически перейти к координатам точки, вызвавшей отражение. Результаты, получаемые в результате совместной обработки лазерных данных, данных инерциальной навигационной системы и приемников глобальной навигационной спутниковой системы, представляют собой массив нерегулярно расположенных точек, для которых известны пространственные координаты и интенсивность отраженного сигнала - лазерно-локационное изображение или «облако» лазерных точек. Лазерно-локационное изображение всегда дискретно, оно состоит из множества точек лазерных отражений (ТЛО), распределенных равномерно по поверхности земли и объективно отражающих топологию земной поверхности и наземных объектов. Такие данные накапливаются на встроенном цифровом носителе бортового компьютера.
Важными особенностями лазерных сканеров помимо точности и детальности получаемой информации является возможность проникновения лазерных импульсов под кроны деревьев и получение нескольких отраженных импульсов для одного излученного (при наличии на обследуемой поверхности различных объектов типа деревьев, зданий, ЛЭП и других).
Одновременно производится цифровая аэрофотосъемка подстилающей поверхности цифровой аэрофотокамерой, жестко скрепленной с оптико-механическим блоком сканера, с возможностью регистрации изображений местности в видимом, инфракрасном либо тепловом диапазоне электромагнитного излучения. Аэрофотоснимки и файлы с информацией о времени срабатывания затвора объектива регистрируются на встроенном цифровом носителе бортового компьютера. Геопространственная привязка аэрофотоснимков к данным воздушного лазерного сканирования выполняется с использованием элементов внешнего ориентирования аэрофотокамеры и меток времени срабатывания затвора объектива. Импульс срабатывания затвора фотокамеры подается на вход приемника ГЛОНАСС/GPS для регистрации (с точностью привязки до 1 мкс) времени получения снимка, а соответственно и параметров внешнего ориентирования для каждого из аэрофотоснимков.
Помимо цветных фотоизображений с борта ЛА возможно получение снимков в других спектральных диапазонах электромагнитного излучения, например инфракрасном (ИК) или ультрафиолетовом. Наличие сопутствующих ИК изображений позволяет получить дополнительную информацию о геоморфологическом строении снимаемой земной поверхности.
Таким образом, технология воздушного лазерного сканирования позволяет получать (после предварительной обработки данных) следующий набор цифровых данных:
- траекторию движения воздушного судна с точностью около 10 см (при наличии наземных ГЛОНАСС-GPS станций и на удалении воздушного судна от любой из них не более чем на 30 км);
- массив геопривязанных точек лазерных отражений заданной точности и детальности;
- массив цифровых геопривязанных фотоснимков заданного разрешения.
Полученные данные цифровой аэрофотосъемки и воздушного лазерного сканирования используются для расчета траектории движения и ориентации летательного аппарата в программном обеспечении LIDAR-системы, исходного массива точек отражений лазерного луча, а также получения исходного массива аэрофотоснимков. По данным приемника ГЛОНАСС/GPS в глобальной системе координат WGS-84 проводится перевычисление полученных координат ТЛО в систему координат, принятую для итогового ведения работ и создания картографических материалов.
Построение высокоточной цифровой модели рельефа (ЦМР) выполняется только по точкам лазерных отражений от поверхности земли, классификация которых производится в автоматическом режиме. После получения предварительных результатов классификации выполняется их проверка и корректировка в интерактивном режиме. Автоматизированная классификация ТЛО должна проводиться с обязательным созданием следующих классов точек: «земля», «растительность», «здания», «провода и надземные сооружения», «прочие точки». Итоговые материалы автоматизированной классификации подвергаются контрольной проверке, в ходе которой оценивается правильность отнесения тех или иных точек к соответствующему классу и выполняется дополнительная корректировка результатов.
Построение ЦМР выполняется в автоматическом режиме методом триангуляции Делоне. ЦМР строится только с использованием точек класса «земля» с обязательным интерактивным исправлением результатов автоматизированной классификации.
Результаты построений высокоточной цифровой модели рельефа сохраняются как в регулярно-ячеистой форме (GRID), так и в виде моделей, основанных на использовании нерегулярной сети треугольников (TIN). Алгоритм построения цифровой модели рельефа должен обеспечивать точность, соответствующую масштабу проводимой съемки, и передавать основные морфоструктурные черты рельефа местности, а также позволять адекватно выразить мелкие эрозионные и техногенные формы рельефа.
Построенная таким образом ЦМР является поверхностью для проецирования цифровых аэрофотоснимков с целью получения ортофотопланов из ориентированных в пространстве аэрофотоснимков на основе элементов внешнего ориентирования, рассчитываемых по данным траектории полета авианосителя и параметрам взаимного ориентирования (оффсет-параметрам) воздушного лазерного сканера, аэрофотокамеры и бортовой ГНСС антенны, расположенной на фюзеляже воздушного судна.
Привязка цифровых аэрофотоснимков к данным воздушного лазерного сканирования выполняется посредством синхронизации времени срабатывания затвора аэрофотокамеры и времени регистрации лазерного импульса.
На основании полученной высокоточной цифровой модели рельефа, сгенерированной из точек лазерных отражений воздушного лазерного сканирования и измерений навигационного комплекса, в специализированном программном обеспечении выполняется вычисление производных поверхностей углов наклонов и построение карты уклонов местности, а также карты экспозиции склонов, водотоков и водосборных бассейнов.
Технология создания цифровых ортофотопланов состоит из следующих основных этапов:
- классификация точек лазерного отражения;
- подбор исходных нетрансформированных снимков;
- выполнение тонового выравнивания исходных нетрансформированных снимков;
- ортотрансформирование снимков согласно рельефу местности, оптимальный подбор и расстановка линий сшивки между ортотрансформированными снимками, и обрезка по заданным границам на каждый лист разграфки;
- оформление ортофотопланов в качестве конечного продукта.
Комплексный анализ полученных в результате камеральной обработки цифровых ортофотопланов, цифровых моделей рельефа и производных поверхностей углов наклонов выполняется на основании разработанных эталонов, представленных в таблице 1.
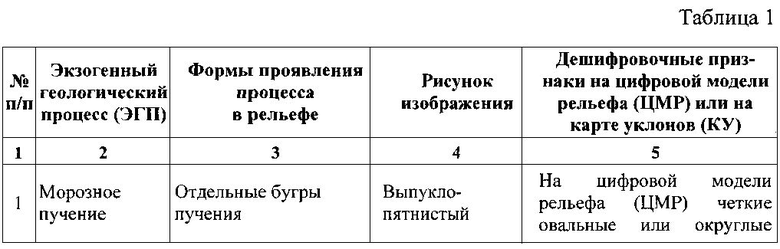
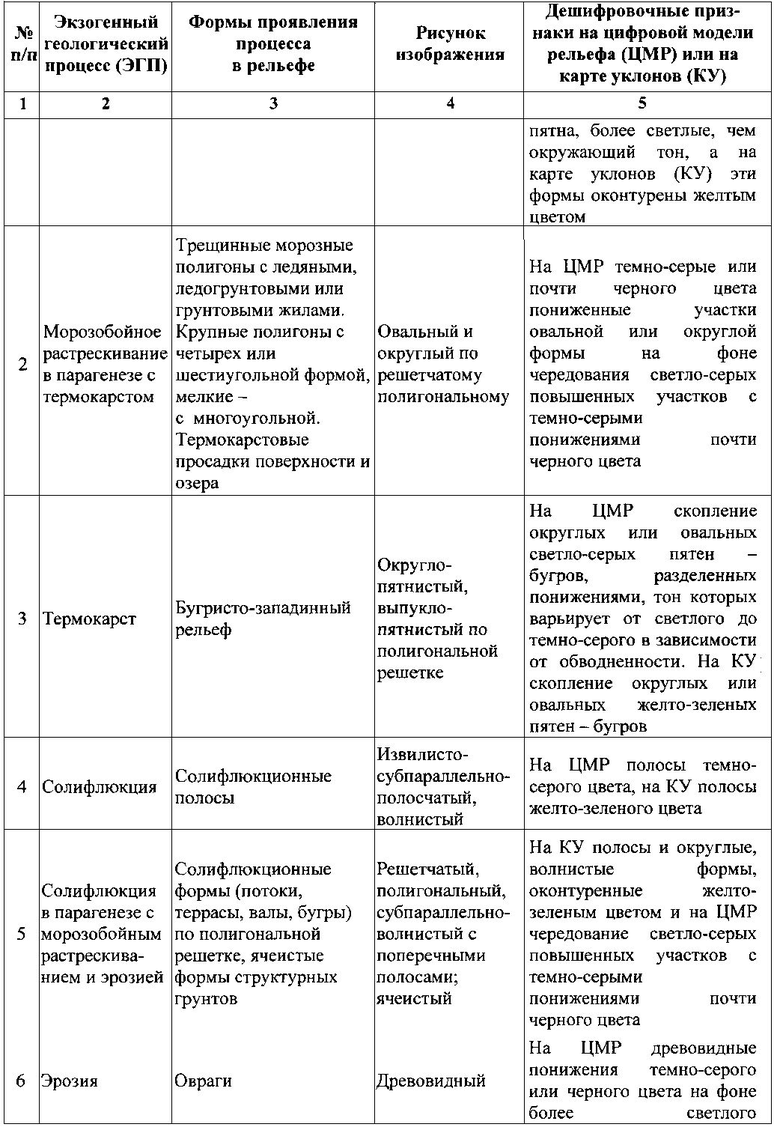

Разработанные на основе данных воздушного лазерного сканирования и верифицированные по ортофотопланам эталоны ЭГП сравниваются с полученными картами уклонов, цифровой модели рельефа и ортофотопланами. Результаты сравнения фиксируются на ортофотоплане или другой тематической карте. По результатам нанесения всех выявленных ЭГП формируется карта распределения ЭГП.
Использование данных воздушного лазерного сканирования и цифровой аэрофотосъемки для построения цифровых ортофотопланов, цифровых моделей рельефа и производных поверхностей углов наклонов позволяет выявлять экзогенные геологические процессы, протекающие на трассе МН, оконтуривать выявленные формы рельефа по разработанным эталонам, в том числе больших размеров, выходящих за границы трассы МН, и оценивать их развитие во времени.
Комплексный анализ построенных данных позволяет выявлять экзогенные геологические процессы, в том числе скрытые растительностью. По прямым дешифровочным признакам растительности оценивается состояние и активность обследуемого участка с наличием ЭГП:
- выявление и определение видов ЭГП;
- определение и фиксация границ развития ЭГП;
- оценка возможного воздействия каждого ЭГП на объект МН;
- выявление вновь образованных и развитие ранее определенных ЭГП при проведении последующих работ по ВЛС и ЦАФС;
- выявление деформаций или нарушенного теплоизоляционного слоя на участках надземной прокладки МН.
Материалы воздушного лазерного сканирования пригодны для точного определения геометрических параметров объектов, в том числе для определения высоты древостоя в любом месте проектируемого трубопровода, опор воздушных линий электропередач, их отклонения от проектных. В сочетании с тепловизионной съемкой обнаружение обводненных участков и водных преград возможно без проведения полевого дешифрирования с выездом на объект.
Построение высокоточной цифровой модели рельефа с повышенной детализацией служит основой для множества производных карт: карты уклонов, карты экспозиции склонов и прочих необходимых при проектировании. Повышенная детализация рельефа помогает выявлять опасные формы рельефа не только в полосе землеотвода трассы МН, но и в коридоре большей ширины, тем самым оценивая возможное развитие опасных геологических процессов.
Построение трехмерных моделей местности по данным воздушного лазерного сканирования и их анализ позволяют осуществлять предпроектные и проектные решения, проводить мониторинг территорий в зоне интереса и моделирование чрезвычайных ситуаций.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ мониторинга состояния трассы магистрального трубопровода | 2018 |
|
RU2699940C1 |
| Способ проведения геотехнического мониторинга линейных сооружений и площадных объектов на основе воздушного лазерного сканирования | 2017 |
|
RU2655956C1 |
| Способ дешифрирования экзогенных геологических процессов и инженерно-геологических условий | 2017 |
|
RU2655955C1 |
| СПОСОБ ИЗМЕРЕНИЯ ОБЪЕМОВ СЫПУЧИХ МАТЕРИАЛОВ НА ОТКРЫТЫХ СКЛАДАХ С ПРИМЕНЕНИЕМ ВОЗДУШНОГО ОПТИЧЕСКОГО СКАНИРОВАНИЯ С БЕСПИЛОТНЫХ АВИАЦИОННЫХ КОМПЛЕКСОВ | 2016 |
|
RU2646538C1 |
| Способ мониторинга технического состояния объектов транспорта газа на основе геоинформационной системы | 2021 |
|
RU2780304C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОВОЙ МОДЕЛИ РЕЛЬЕФА И/ИЛИ ОРТОФОТОПЛАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2216711C1 |
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ИЗГОТОВЛЕНИЯ ЦИФРОВЫХ ПЛАНОВ И КАРТ | 2007 |
|
RU2371768C2 |
| Способ построения трехмерной модели местности вдоль полотна железнодорожного пути | 2020 |
|
RU2726256C1 |
| МОДЕРНИЗИРОВАННАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ АЭРОФОТОСЪЕМКОЙ ДЛЯ ПИЛОТИРУЕМЫХ ВОЗДУШНЫХ СУДОВ (МБСУ АФС) | 2016 |
|
RU2646539C1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ПРОДУКТОПРОВОДОВ | 2005 |
|
RU2281534C1 |

Изобретение относится к области получения топографической информации о рельефе земной поверхности по данным аэрофотосъемки и лазерного сканирования местности с борта воздушного судна, в частности к мониторингу участков трассы магистрального нефтепровода (МН) для выявления признаков экзогенных геологических процессов (ЭГП) и фиксации их границ. В способе построения карты ЭГП местности вдоль трассы МН выполняют цифровую аэрофотосъемку и воздушное лазерное сканирование. Одновременно осуществляют сбор и запись навигационных данных для формирования и записи координат точек траектории полета. Затем выполняют обработку данных воздушного лазерного сканирования и навигационных данных. Получают облако точек лазерных отражений и на основании их автоматизированной классификации с интерактивной коррекцией результатов строят цифровую модель рельефа (ЦМР) местности. По данным ЦМР формируют в блоке построения производных поверхностей углов наклонов карту уклонов местности. Одновременно с построением ЦМР проводят обработку данных цифровой аэрофотосъемки. С использованием результатов построения цифровой модели рельефа, карты уклонов и ортофотоплана местности осуществляют выявление и формирование карты ЭГП, протекающих на местности вдоль трассы МН. Техническим результатом изобретения является повышение точности выявления и определения ЭПГ при сокращении трудоемкости и сроков проведения обследований. 1 ил., 1 табл.
Способ построения карты экзогенных геологических процессов (ЭГП) местности вдоль трассы магистрального нефтепровода (МН), заключающийся в том, что выполняют цифровую аэрофотосъемку и воздушное лазерное сканирование местности вдоль трассы МН с борта воздушного судна для получения массива точек лазерных отражений и цифровых аэрофотоснимков местности, одновременно с цифровой аэрофотосъемкой и воздушным лазерным сканированием осуществляют сбор и запись навигационных данных, полученных от наземной навигационной системы, бортовой навигационной системы воздушного судна и инерциальной навигационной системы лазерного сканера для формирования и записи координат точек траектории полета, выполняют обработку данных воздушного лазерного сканирования и по результатам обработки и сформированным координатам точек траектории полета получают облако точек лазерных отражений, на основании автоматизированной классификации которых строят цифровую модель рельефа местности, проводят интерактивную коррекцию результатов автоматизированной классификации и осуществляют запись скорректированной цифровой модели рельефа, передают данные о цифровой модели рельефа в блок построения производных поверхностей углов наклонов и формируют карту уклонов местности, одновременно с построением цифровой модели рельефа проводят обработку данных цифровой аэрофотосъемки: осуществляют подбор исходных нетрансформированных снимков, выполняют тоновое выравнивание последних и ортотрансформирование выравненных по тону снимков согласно рельефу местности с формированием ортофотоплана местности, используя результаты построения цифровой модели рельефа, карты уклонов и ортофотоплана местности, осуществляют выявление и определение границ экзогенных геологических процессов (ЭГП), протекающих на местности вдоль трассы МН, на основании выбора предварительно сохраненных эталонов ЭГП и сравнения их с результатами построения и по выявленным границам ЭГП осуществляют формирование карты ЭГП местности вдоль трассы МН.
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОВОЙ МОДЕЛИ РЕЛЬЕФА И/ИЛИ ОРТОФОТОПЛАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2216711C1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ПРОДУКТОПРОВОДОВ | 2005 |
|
RU2281534C1 |
| Электростатический микрофон | 1930 |
|
SU24003A1 |
| US 3674369 A1, 04.07.1972. | |||

