Изобретение относится к области геофизики и, в частности, к измерению или обнаружению скрытых масс или объектов оптическими средствами, а также к устройствам для наблюдения за оборудованием трубопроводов.
Известны способы диагностики состояния продуктопроводов, включающий сканирование территории продуктопровода посредством тепловизионной и визуальной съемок с летательного аппарата, текущее позиционирование летательного аппарата пилотажно-навигационными средствами, фиксацию данных тепловизионной и визуальной съемок и лазерного пространственного сканирования местности с привязкой к данным текущего позиционирования летательного аппарата, формирование комплексной модели теплового и визуального изображения поверхности территории продуктопровода и интерпретацию данных изображения поверхности территории продуктопровода (см., например, RU № 2200900, G 01 V 3/165, 2002.12.10).
Недостатком известных способов является то, что для достоверной интерпретации данных дополнительно к тепловизионной и визуальной съемкам необходимо применять исследование магнитометрическими средствами, которые во избежание искажений сигналов влиянием электрических систем летательного аппарата требуют применения внешней подвески, что в конечном итоге существенно осложняет его функционирование.
Более предпочтительным для летательных аппаратов является способ диагностики состояния продуктопроводов, включающий сканирование территории продуктопровода посредством тепловизионной и визуальной съемок с летательного аппарата, лазерное пространственное сканирование местности на территории продуктопровода, текущее позиционирование летательного аппарата пилотажно-навигационными средствами, фиксацию данных тепловизионной и визуальной съемок и лазерного пространственного сканирования местности с привязкой к данным текущего позиционирования летательного аппарата, формирование комплексной модели теплового и визуального изображения поверхности территории продуктопровода и интерпретацию данных изображения поверхности территории продуктопровода (RU № 2091759, G 01 N 21/39, 1997.09.27).
Применение такой аэросъемочной технологии диагностики позволяет экономить время на этапе проведения самих съемок и получать целостные картины линейных и труднодоступных объектов, таких как магистральные трубопроводы. Полученные тепловые кадры можно подвергнуть дальнейшей обработке (фильтрации) для выявления, например, глубины залегания трубопровода или выявление подводных водотоков и т.д. Чаще всего тепловая картина используется совместно со снимками в видимом диапазоне (фотоснимками), с наложением на векторную или растровую карту местности, где в качестве основного слоя показана схема объекта со всеми его компонентами и выявленными аномалиями.
Однако данная технология по причине несогласованности функционирования пилотажно-навигационных и сканирующих средств не в полной мере соответствует возможностям автоматизированной обработки и интерпретации данных аппаратно-программными средствами вычислительной техники
Задачей, на решение которой направлено заявляемое изобретение, является создание эффективной технологии диагностики состояния продуктопроводов.
Техническим результатом, который может быть получен при осуществлении изобретения, является оптимизация количества данных сканирования и обеспечение их комплексной корреляции с данными позиционирования летательного аппарата.
Указанный технический результат достигается способом диагностики состояния продуктопроводов, включающем сканирование территории продуктопровода посредством тепловизионной и визуальной съемок тепловизионными камерами с летательного аппарата, лазерное пространственное сканирование местности на территории продуктопровода, текущее позиционирование летательного аппарата пилотажно-навигационными средствами, фиксацию данных тепловизионной и визуальной съемок и лазерного пространственного сканирования местности с привязкой к данным текущего позиционирования летательного аппарата, формирование комплексной модели теплового и визуального изображения поверхности территории продуктопровода и интерпретацию данных изображения поверхности территории продуктопровода, за счет того что сканирование территории продуктопровода посредством тепловизионной и визуальной съемок осуществляют циклическим поворотом направления оптической визуализации относительно оси, расположенной перпендикулярной направлению полета, при этом регистрацию данных осуществляют дискретно в покадровом режиме в моменты вертикального положения оптических осей тепловизионных камер командой блока формирования цифровой и топологической модели рельефа.
А также за счет того, что фиксацию данных тепловизионной и визуальной съемок проводят с 30-40% наложением кадров, при этом циклический поворот направления оптической визуализации осуществляют с периодом, определяемым из соотношения Т=0,157 Н/V, где Н - высота полета в метрах, а V - скорость полета в метрах в секунду.
А также за счет того, что текущее позиционирование летательного аппарата пилотажно-навигационными средствами осуществляют инерциальной угломерной системой и пилотажно-навигационными средствами в сочетании с GPS-глобальной системой навигации и определения положения и дифференциальной поправкой данных GPS-привязкой их к данным Государственной геодезической сети.
Сущность заявляемого технического решения поясняется чертежом, где показана блок-схема системы для реализации способа.
Реализация способа и проявление сущности изобретения осуществляются следующим образом.
Во время проведения работ с борта летательного аппарата на поверхности земли в точно известных геодезических координатах устанавливаются базовые GPS-станции 1 для вычисления дифференциальных поправок в режиме постобработки, что позволяет при последующей обработке уточнить координаты положения летательного аппарата в момент съемки кадра.
Для создания трехмерной модели местности и последующего учета ее при обработке данных тепловизионной и визуальной съемок используется лазерный сканер 2 совместно с инерциальной угломерной системой 3 (например, воздушный сканер ALTM 3100 производства фирмы "Optech Inc". Информация на сайте www.geokosmos.ru). Блок 4 формирования цифровой и топологической модели рельефа принимает данные о времени отражения лазерного луча от поверхности и угле направления излучения от лазерного сканера 2, о крене и тангаже летательного аппарата в момент излучения - от инерциальной угломерной системы 3 и о положении в пространстве летательного аппарата - от бортовых пилотажно-навигационных средств 5 (например, аналогичных установленным на вертолете МИ-8Т) и преобразует их в цифровую модель рельефа (ЦМР) и топологическую модель рельефа (ТМР).
Комплекс средств для тепловизионной съемки, состоящий из тепловизионной камеры 6 и накопителя 7 снимков тепловизионной съемки, установленный на борту летательного аппарата, осуществляет съемку сканированием территории продуктопровода в так называемом дальнем инфракрасном диапазоне, а именно в диапазоне длин волн 9 микрометров. Именно в этом диапазоне находится максимум собственного теплового излучения поверхности земли над трубопроводами.
Визуальный комплекс, состоящий из цифровой фотокамеры 8 и накопителя 9 фотоснимков визуальной съемки, установленный на борту летательного аппарата, осуществляет съемку сканированием территории продуктопровода в видимом диапазоне.
Тепловизионная камера 6 и цифровая фотокамера 8 размещены на качающейся платформе с электромеханическим приводом (не показаны), что обеспечивает циклический поворот направления оптической визуализации относительно оси, расположенной перпендикулярной направлению полета и являющейся осью качания упомянутой платформы. Частота качания может автоматически регулироваться в зависимости от скорости и высоты полета, при этом период качания (циклического поворота направления оптической визуализации) могут определять из соотношения Т=0,157Н/V, где Н - высота полета в метрах, а V - скорость полета в метрах в секунду.
Регистрацию данных (например, посредством срабатывания "затворов" тепловизионной камеры 6 и цифровой фотокамеры 8) осуществляют дискретно в покадровом режиме в моменты вертикального положения направления визуализации, то есть в момент вертикального положения оптических осей упомянутых камер командой блока 4 формирования цифровой модели рельефа (ЦМР) и топологической модели рельефа (ТМР) в систему 10 остановки изображений. Таким способом удается избежать искажения получаемых снимков, вызванного поступательным движением камер. Съемка производится с использованием покадрового режима с чувствительностью 0,03 К. Под чувствительностью в данном случае понимается минимальная разность температуры двух участков поверхности, расположенных рядом, которые еще различаются на снимке. В технических руководствах на тепловизоры этот параметр называется эквивалентной шуму разностью температур.
Тепловизионная камера 6 ведет съемку со скоростью 50 кадров в секунду, при этом записывается в память накопителей 7 и 9 только те снимки, которые необходимы для перекрытия кадров на 30-40%, то есть фиксацию данных тепловизионной и визуальной съемок проводят, по меньшей мере, с 30-40% наложением кадров, также в памяти блока 4 формирования цифровой и топологической модели рельефа фиксируются данные о GPS-координатах, высоте, скорости вертолета и точное время съемки кадра.
Тепловизионная съемка, визуальная фотосъемка и лазерное пространственное сканирование возможны на высотах от 100 метров и выше на безопасной для летательного аппарата (например, вертолета) скорости. Съемка проводится отдельными прямоугольными кадрами, размер которых 0,35Н на 0,26Н метров, где Н - высота полета вертолета в метрах (например, при высоте полета 100 метров кадр будет иметь размер 35 метров по ширине снимаемой трассы на 26 метров в направлении оси трубопровода).
Для наиболее точной привязки получаемых фототепловизионных снимков к текущему позиционированию летательного аппарата используют работу инерциальной угломерной системы 3 и пилотажно-навигационных средств 5 в сочетании с GPS - глобальной системой навигации и определения положения, а также дифференциальной поправкой данных GPS-привязкой их к данным Государственной геодезической сети (так называемый дифференциальный GPS-режим с постобработкой). Для этого на нем могут устанавливать аппаратуру 11 бортовой GPS-системы GPS-глобальной системы навигации и определения положения.
Суть данного метода заключается в следующем. GPS-приемник устанавливается на точку, координаты которой точно привязаны к Государственной геодезической сети. Для этого в каталоге Государственной геодезической сети выбираются метки "ГГС Сигнал", расположенные в непосредственной близости от продуктопровода. Обследуемый участок продуктопровода разбивают на зоны протяженностью порядка шестидесяти километров. В центре каждой зоны устанавливается базовая GPS-станция 1, которая привязывается к Государственной геодезической сети по двум-трем меткам "ГГС Сигнал". Во время работы GPS-приемник определяет свои GPS-координаты и сравнивает их с точными координатами местоположения GPS-приемника. Так определяется разность координат, называемая дифференциальной поправкой. Дифференциальная поправка записывается в память GPS-приемника. При последующей обработке корректируются координаты, полученные с бортового GPS-приемника аппаратуры 11 бортовой GPS-системы. Дифференциальную поправку можно применять в радиусе не более 60 километров от базовой GPS-станции 1, так как с увеличением расстояния между бортовым и GPS-приемником более 30 километров возрастает погрешность определения координат при постобработке.
Дистанционную диагностику проводят с борта летательного аппарата, например на базе вертолета Ми-8Т, оснащенного пилотажно-навигационными средствами, позволяющими летать по заданному маршруту днем и в темное время суток. Навигационная программа позволяет экипажу видеть на мониторе положение вертолета относительно требуемой траектории полета в реальном масштабе времени. Экипаж вертолета в любой момент времени имеет информацию о величине и направлении отклонения от заложенной в программу траектории по территории продуктопровода, совпадающей с осью обследуемого продуктопровода. Полет производится на высоте 100-150 метров по заложенному в навигационную программу маршруту со сканированием территории продуктопровода посредством тепловизионной и визуальной съемок с летательного аппарата, лазерным пространственным сканированием местности на территории продуктопровода и текущим позиционированием летательного аппарата пилотажно-навигационными средствами.
Полученные в процессе съемок данные тепловой информации просматриваются в исходном состоянии без всякой обработки на предмет выявления утечек. Процесс обнаружения утечек газа не требует какой-либо специальной обработки. Поэтому их поиск можно вести сразу после полета, а при накоплении практического опыта эту операцию можно будет поручить борт-оператору и производить ее в полете на контрольном мониторе. Для более подробного определения мест утечек и глубины залегания продуктопроводов данные тепловизионной и визуальной съемок и лазерного пространственного сканирования местности с привязкой к данным текущего позиционирования летательного аппарата фиксируют в памяти накопителей 7 и 9 цифровыми изображениями, где каждый пиксель записывается 14-битным числом, что соответствует 16383 оттенкам черного цвета.
Фиксированные таким образом данные совместно с данными блока 4 формирования цифровой и топологической модели рельефа обрабатывают математическими методами в программно-аппаратном блоке 12 обработки (например, графическом компьютере) с использованием метода математического усреднения для точного выделения зоны разных оттенков и соответственно разных температур и производят формирование комплексной модели теплового и визуального изображения поверхности территории продуктопровода. Интерпретацию данных изображения поверхности территории продуктопровода осуществляют созданием ортофотопланов с зонами более темного или более светлого тона по отношению к остальной поверхности. Так, более темные участки в зависимости от глубины цвета можно определить как возможную утечку газа, а менее глубокие тона темного цвета распознаются как обводненные участки. Светлые зоны на обработанных снимках, а соответственно, более нагретые участки можно определить как нарушение изоляции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСТРОЕНИЯ КАРТЫ ЭКЗОГЕННЫХ ГЕОЛОГИЧЕСКИХ ПРОЦЕССОВ МЕСТНОСТИ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНОГО НЕФТЕПРОВОДА | 2015 |
|
RU2591875C1 |
| Способ мониторинга состояния трассы магистрального трубопровода | 2018 |
|
RU2699940C1 |
| СПОСОБ АЭРОГАММАСПЕКТРОМЕТРИЧЕСКОЙ СЪЕМКИ ГЕОЛОГИЧЕСКОГО НАЗНАЧЕНИЯ | 2017 |
|
RU2673505C1 |
| Способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ и многофункциональный аппаратно-программный комплекс для его реализации | 2021 |
|
RU2779707C1 |
| УСТРОЙСТВО СИНТЕЗА КАРТОГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ | 2004 |
|
RU2250182C1 |
| Способ геодезического мониторинга деформационного состояния земной поверхности на территории разрабатываемых открытым способом крупных рудных месторождений с применением технологии лазерного сканирования | 2018 |
|
RU2698411C1 |
| Способ проведения геотехнического мониторинга линейных сооружений и площадных объектов на основе воздушного лазерного сканирования | 2017 |
|
RU2655956C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОВОЙ МОДЕЛИ РЕЛЬЕФА И/ИЛИ ОРТОФОТОПЛАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2216711C1 |
| БОРТОВАЯ СИСТЕМА ЛОКАЛЬНОГО АЭРОМОНИТОРИНГА ОБЪЕКТОВ ПРИРОДНО-ТЕХНОГЕННОЙ СФЕРЫ | 2006 |
|
RU2315951C1 |
| СПОСОБ ЛОКАЛЬНОГО АЭРОМОНИТОРИНГА ГЕОТЕХНИЧЕСКИХ СИСТЕМ И БОРТОВОЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2227271C1 |
Изобретение относится к области геофизики и, в частности, к измерению или обнаружению скрытых масс или объектов оптическими средствами, а также к устройствам для наблюдения за оборудованием трубопроводов. Заявлен способ диагностики состояния продуктопроводов, включающий сканирование территории продуктопровода посредством тепловизионной и визуальной съемок с летательного аппарата, лазерное пространственное сканирование местности на территории продуктопровода, текущее позиционирование летательного аппарата пилотажно-навигационными средствами. Фиксируют данные тепловизионной и визуальной съемок и лазерного пространственного сканирования местности с привязкой к данным текущего позиционирования летательного аппарата. Формируют комплексную модель теплового и визуального изображения поверхности территории продуктопровода. Интерпретируют данные изображения поверхности территории продуктопровода. Сканирование территории продуктопровода посредством тепловизионной и визуальной съемок осуществляют циклическим поворотом направления оптической визуализации относительно оси, расположенной перпендикулярно направлению полета, причем регистрацию данных осуществляют дискретно в покадровом режиме в моменты вертикального положения оптических осей тепловизионных камер командой блока формирования цифровой и топологической модели рельефа. Технический результат: оптимизация количества данных сканирования и обеспечение их комплексной корреляции с данными позиционирования. 2 з.п. ф-лы, 1 ил.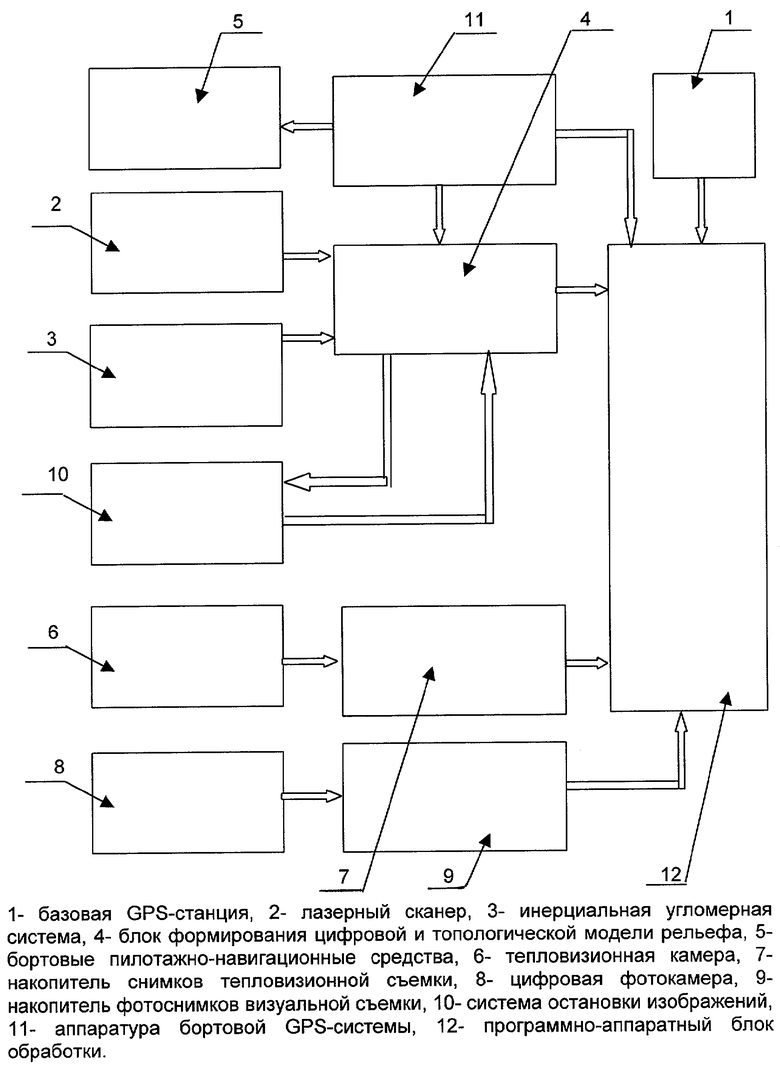
| АВИАЦИОННОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ УТЕЧЕК ГАЗА ИЗ ТРУБОПРОВОДОВ | 1995 |
|
RU2091759C1 |
| СПОСОБ ЛОКАЛЬНОГО АЭРОМОНИТОРИНГА ГЕОТЕХНИЧЕСКИХ СИСТЕМ И БОРТОВОЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2227271C1 |
| СПОСОБ ПОЛУЧЕНИЯ КРУПНОМАСШТАБНОЙ КАРТЫ ПАРАМЕТРОВ МНОГОМЕРНОЙ СТРУКТУРЫ ПРИРОДНОЙ СРЕДЫ И АЭРОФОТОСЪЕМОЧНЫЙ САМОЛЕТ ДЛЯ ЕЕ ПОЛУЧЕНИЯ | 1990 |
|
RU2044273C1 |
| Лаврова Н.П., Стеценко А.Ф., "Аэрофотосъемка | |||
| Аэрофотосъемочное оборудование", М., "Недра", 1981 | |||
| DE 19919487 A1, 23.11.2000. | |||

