Область техники, к которой относится изобретение
Настоящее изобретение относится в целом к клапанам управления текучей средой, в частности, к способам и устройству для оценки виброустойчивости компонента клапана управления текучей средой.
Уровень техники
Регулирующие клапаны, главным образом, используются в системах управления технологическими процессами для регулирования потока технологических текучих сред. Регулирующий клапан, как правило, включает в себя узел привода (например, пневматический привод, гидравлический привод и др.), который автоматизирует действие регулирующего клапана. Типичный узел привода включает в себя привод, имеющий кожух, соединенный с наружной поверхностью корпуса клапана, например, посредством скобы. Кроме того, управляющий подузел, который автоматизирует действие регулирующего клапана, соединен (например, жестко соединен) с кожухом привода. Например, управляющий подузел может включать компоненты или измерительные приборы, такие как, например, механизм позиционирования, объемный бустер, отключающий клапан, клапан сброса и др., которые соединены (например, соединены по текучей среде) посредством труб (например, тонкостенных металлических труб).
Во время действия узел привода подвергается воздействию широкого спектра уровней вибрации, производимого технологической системой. Например, текучая среда через трубопровод технологической системы и/или компоненты технологической системы (например, насосы) может сообщать различные частоты вибрации узлу привода. Кроме того, компоненты и/или трубы узла привода могут подвергаться уровням вибрации в усиленном или увеличенном диапазоне, если вибрация, передаваемая к узлу привода, имеет частоту, которая близка или равна резонансной частоте узла привода. Однако приборные трубы часто приспосабливают по необходимости при сборке (например, в заводских условиях) и обычно не испытывают или не оценивают для определения того, смогут ли трубы выдерживать ожидаемые уровни вибрации и/или частот.
Раскрытие изобретения
Типичный способ, раскрываемый здесь, включает в себя выбор компонента регулирующего клапана текучей среды и расположение датчика относительно выбранного компонента. Способ также включает в себя механическое возбуждение выбранного компонента, определение резонансной частоты выбранного компонента, и выполнение корректирующих мер, основанных на резонансной частоте выбранного компонента.
Типичный способ, раскрываемый здесь, включает в себя выбор секции труб, возбуждение выбранной секции труб, контроль изменяющегося во времени перемещения выбранной секции труб при возбуждении и измерение амплитуды изменяющегося во времени перемещения выбранной секции труб.
Вариант устройства включает в себя датчик для измерения изменяющегося во времени перемещения, размещаемый рядом с выбранным компонентом узла регулирующего клапана. Возбудитель колебаний создает частоту вибрации выбранного компонента. Обрабатывающее устройство принимает сигналы, создаваемые датчиком, и преобразует сигналы в выходной сигнал для определения резонансной частоты выбранного компонента.
Краткое описание графических материалов
На фиг. 1 показан известный регулирующий клапан текучей среды.
На фиг. 2 приведена блок-схема, отображающая раскрываемый здесь типичный способ оценки виброустойчивости компонента регулирующего клапана текучей среды.
На фиг. 3 приведен вариант секции приборных труб, имеющей сравнительно высокую резонансную частоту.
На фиг. 4 приведен вариант секции приборных труб, имеющей сравнительно низкую резонансную частоту.
На фиг. 5 приведен пример графика, иллюстрирующего убывание по амплитуде в течение периода времени.
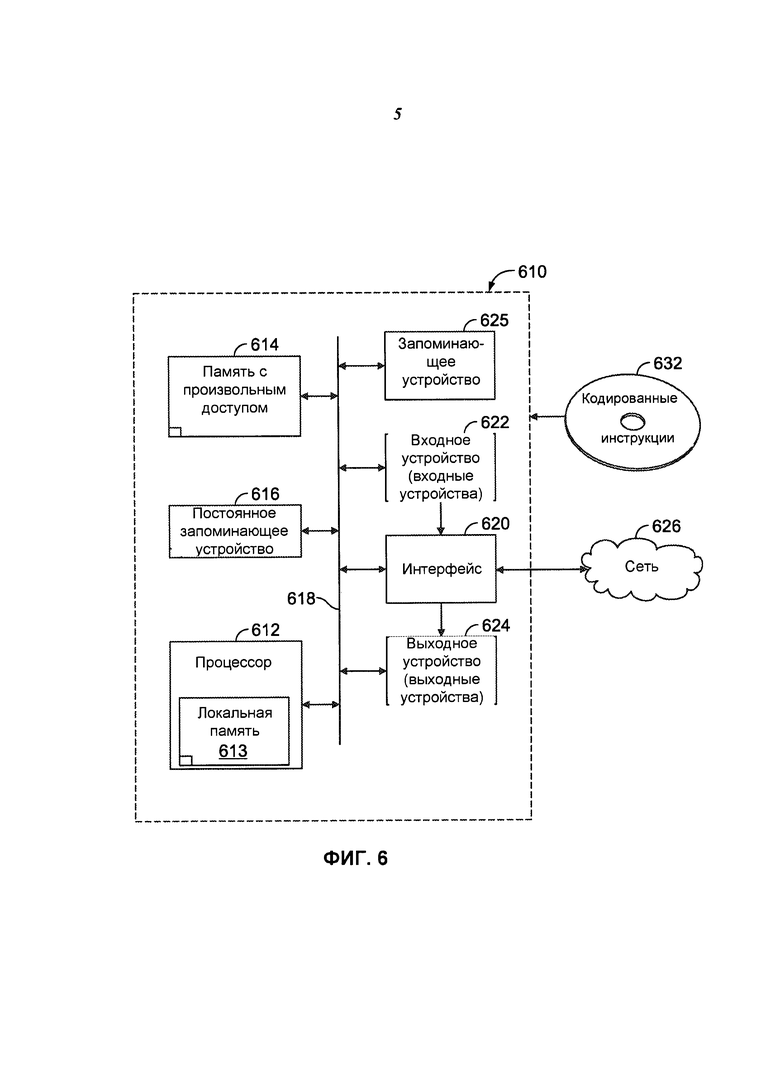
На фиг. 6 представлена блок-схема типичной обрабатывающей системы, которая может использоваться для реализации варианта способов и устройств, раскрываемых здесь.
Осуществление изобретения
В целом, типичные способы, раскрываемые здесь, дают возможность оценки виброустойчивости компонента, соединенного с конструкцией или регулирующим клапаном текучей среды. В частности, типичные способы, раскрываемые здесь, обеспечивают испытания для проверки того, что характеристика собственной или резонансной частоты компонента, соединенного с конструкцией, отличается и/или больше, чем диапазон вибраций или частот конструкции во время эксплуатации. Например, типичные способы, раскрываемые здесь, могут использоваться для проверки того, что компонент и/или приборные трубы, приспособленные к регулирующему клапану, имеют резонансную частоту, которая отличается и/или больше, чем диапазон или спектр ожидаемых частот вибрации, которые будут порождаться или создаваться узлом привода во время действия узла привода.
Типичные способы, раскрываемые здесь, обеспечивают испытания при резонансной частоте для оценки или определения того, имеет ли приспособленный к условиям приборный трубопровод характеристику резонансной частоты, отличающуюся и/или большую, чем характеристика резонансной частоты привода, трубопровода или любого другого компонента технологической системы, который вызывает вибрацию регулирующего клапана текучей среды. Выполнение испытаний при резонансной частоте может быть проведено в заводских условиях после сборки и/или в производственных условиях для прогнозирования с увеличенной надежностью или точностью эксплуатационного срока службы приспособленных к условиям приборных труб, основываясь на ожидаемых уровнях вибрации, которую компонент и/или приборные трубы будут испытывать во время эксплуатации. Кроме того, длина или секция приборных труб может быть оптимизирована, используя типичные испытания при резонансной частоте или способы, описываемые здесь.
Некоторые типичные способы, раскрываемые здесь, обеспечивают возможность сравнения характеристик резонансной частоты компонента и/или приборных труб и рекомендованного порогового значения. Например, рекомендованного порогового значения, отличающегося и/или большего, чем ожидаемая частота вибраций, которая может передаваться к приводу. В некоторых вариантах рекомендованное пороговое значение может быть десятикратным коэффициентом относительно максимального ожидаемого уровня вибрации. Таким образом, можно определить с большей степенью точности или достоверности, что приспособленные к условиям приборные трубы компонента, соединенного с приводом, могут выдерживать вибрации, порождаемые приводом, который вибрирует, например, с собственной или резонансной частотой труб.
В других вариантах способы, раскрываемые здесь, дают возможность оценки или проверки любого другого компонента, соединенного, например, с кожухом привода, такого как, например, скобы, опоры, патрубки трубопровода, фитинги и/или другие крепежные изделия.
В дополнение к определению резонансной частоты компонента узла клапана, типичные способы и устройства, раскрываемые здесь, могут также использоваться для определения или оценки характеристики затухания (например, декремента или коэффициента затухания) компонента (например, секции труб), соединенного с узлом клапана. Например, декремент затухания системы может быть оценен с помощью, например, методов временных интервалов, методов представления в частотной области и/или других подходящих методов, используемых для определения декремента затухания системы. Характеристики затухания могут использоваться, например, для улучшения или оптимизации эксплуатационного срока службы различных компонентов, соединенных с узлом клапана текучей среды для соответствия желаемому эксплуатационному сроку службы, требованиям надежности и/или циклу технического обслуживания.
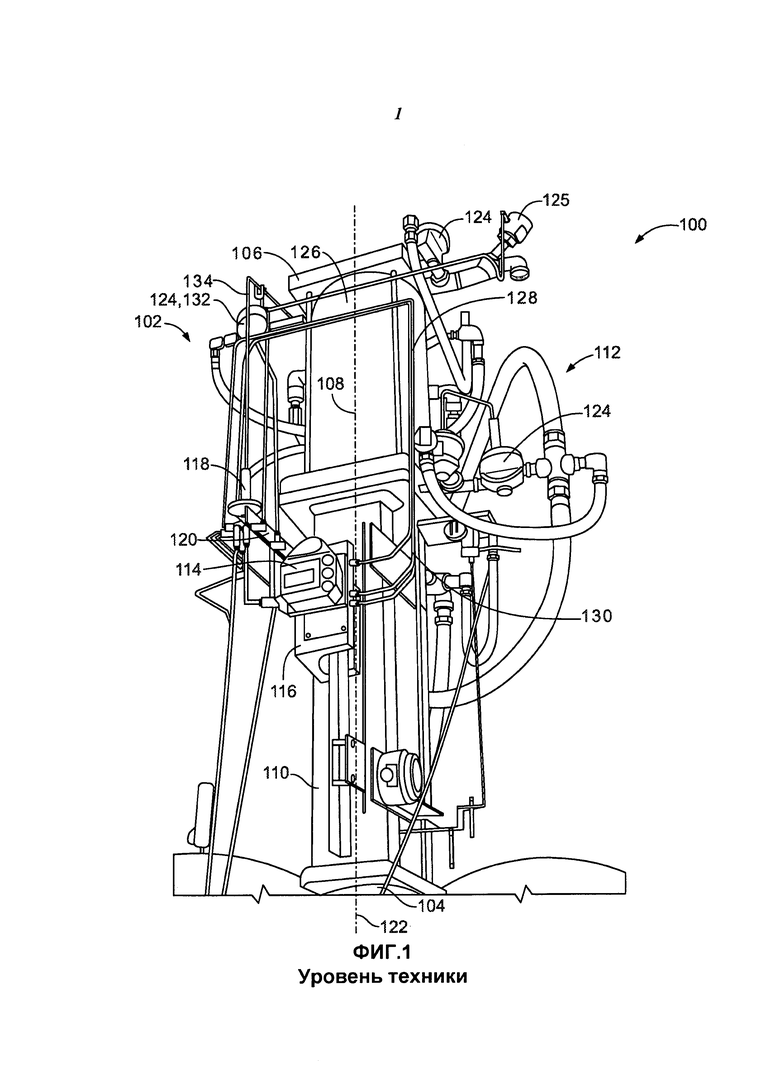
На фиг. 1 показан известный узел 100 регулирующего клапана текучей среды. Как показано, узел 100 регулирующего клапана текучей среды содержит узел 102 привода, соединенный с гидравлическим клапаном 104. Впуск гидравлического клапана 104 гидравлически соединен с расположенным выше по течению каналом текучей среды (например, трубопроводом), а выпуск гидравлического клапана 104 гидравлически соединен с расположенным ниже по течению каналом текучей среды (например, трубопроводом). Технологический флюид (например, вода, пар, аммиак и др.) протекает между впуском и выпуском и может вызывать вибрацию трубопровода технологической системы и/или узла 100 привода регулирующего клапана.
Узел 102 привода (например, пневматический привод, гидравлический привод, и др.) автоматизирует действие узла 100 регулирующего клапана. Узел 102 привода содержит цилиндр или привод 106, имеющий кожух 108, который соединен с корпусом 104 клапана посредством скобы 110. В показанном варианте привод 106 заделан одним концом или по существу перпендикулярен к проточному каналу текучей среды через клапан 104 текучей среды.
Кроме того, узел 102 привода в показанном варианте включает подузел или компоненты 112 для автоматизации узла 100 регулирующего клапана. Такие компоненты 112 соединены (например, жестко соединены) с кожухом 108 и/или скобой 110. В показанном варианте контроллер или механизм 114 позиционирования смонтирован на скобе 110 посредством монтажного держателя 116, а отключающий клапан 118 смонтирован на скобе 110 посредством монтажного держателя 120, проходящего по существу перпендикулярно относительно продольной оси 122 привода 106. Когда давление питающего или управляющего флюида (например, воздуха, масла для гидросистем и др.) привода 106 падает ниже предварительно заданного значения, отключающий клапан 118 вызывает перемещение узла 102 привода в отказобезопасное положение (например, отказобезопасное верхнее положение, отказобезопасное положение блокирования, отказобезопасное нижнее положение). Для увеличения скорости хода привода 106, узел 100 регулирующего клапана по фиг. 1 содержит один или несколько объемных бустеров 124, соединенных с компонентами трубопровода, такими как патрубки трубопровода, тройники и крестовины. Узел 102 привода может также содержать один или несколько клапанов 125 сброса и/или другие устройства управления текучей средой, которые дают возможность автоматизировать действие узла 102 привода.
Для гидравлической связи компонентов 112 в варианте узла 100 привода по фиг. 1 используются приборные трубы 126. В частности, приборные трубы 126 представляют собой жесткие металлические трубы (например, трубы из нержавеющей стали) и обычно имеют диаметр около трех восьмых дюйма (3/8 дюйма). Однако в других вариантах диаметр приборных труб 126 может находиться между, например, четвертью дюйма (1/4 дюйма) и одного с четвертью дюйма (1 1/4 дюйма).
Например, механизм 114 позиционирования гидравлически связан с отключающим клапаном 118 посредством секций 128 и 130 приборных труб. Как показано, пролет секций 128 и 130 приборных труб имеет значительную протяженность, что приводит к сравнительно низкой жесткости труб. Кроме того, отключающий клапан 118 соединен с клапанным бустером 132 посредством секции 134 приборных труб, которая также имеет значительную протяженность.
При сборке или изготовлении узла 100 регулирующего клапана приборные трубы 126 приспосабливаются к узлу 100 регулирующего клапана. Вследствие приспосабливания к узлу 100 регулирующего клапана секция приборных труб конфигурируется для получения оптимизированных характеристик резонансной частоты.
Узел 100 регулирующего клапана конфигурирован таким образом, чтобы выдерживать ожидаемые уровни вибрации, которые могут передаваться к узлу 100 регулирующего клапана посредством, например вибрации трубопровода, вызванной протеканием текучей среды через технологическую систему при эксплуатации. В некоторых вариантах применения привод 106 может становиться сильно возбужденным и в значительной степени усиливает вибрацию трубопровода, когда вибрация трубопровода создает частоту, близкую к резонансной частоте привода 106. При резонансной частоте привод 106 стремится колебаться со сравнительно большой (например, максимальной) амплитудой, таким образом, порождая повышенные и/или аномально высокие уровни вибрации, например, в компонентах 112 и/или приборных трубах 126. Таким образом, в дополнение к вибрации, производимой технологической системой, компоненты 112 и/или приборные трубы 126 могут подвергаться воздействию повышенных уровней вибрации узла 102 привода.
Если приборные трубы 126 собраны с приводом 106 таким образом, что секция приборных труб (например, любая из секций 128, 130 и 134 приборных труб) имеет характеристику резонансной частоты, находящуюся в диапазоне уровней частоты (например, близкую к ним), создаваемых технологической системой и/или узлом 102 привода, приборные трубы 126 могут вибрировать при собственной резонансной частоте при повышенных уровнях ускорения. Резонансная вибрация при повышенных уровнях может вызывать вибрацию или осцилляцию приборных труб 126 в жестком режиме, приводя к разрушению, трещинообразованию, усталости и/или другим повреждениям приборных труб 126. Таким образом, секция приборных труб, имеющая сравнительно низкую характеристику резонансной частоты, имеет большую вероятность повреждения под воздействием диапазона частоты вибраций, обычно возникающих в действующей технологической системе, тогда как секция приборных труб, имеющая сравнительно высокую характеристику резонансной частоты (т.е. резонансную частоту, большую, чем диапазон частот, обычно возникающих в действующей технологической системе), имеет малую вероятность повреждения из-за вибрации.
Кроме того, резонансная частота узла 102 привода может отличаться для различных регулирующих клапанов. Например, приводы с большой длиной хода (например, с длиной хода, большей чем 10 дюймов) имеют увеличенный вес (например, массу) и габариты по сравнению, например, с приводом с малой длиной хода (например, длиной хода, меньшей чем 10 дюймов). Таким образом, привод с большой длиной хода, состоящий из такого же материала, что и привод с малой длиной хода, может иметь меньшую жесткость конструкции, чем привод с малой длиной хода. В результате привод с большой длиной хода, как правило, проявляет резонансную частоту, которая значительно меньше, чем резонансная частота привода с малой длиной хода. На практике пониженная резонансная частота приводов с большой длиной хода, как правило, усиливает сравнительно низкочастотную вибрацию трубопровода технологической системы. Поэтому компоненты 112 и секции приборных труб (128, 130 и 134) узла 102 привода могут подвергаться воздействию значительного или широкого спектра частот вибраций при широком диапазоне амплитуд.
Кроме того, приспосабливание к условиям секций 128, 130 и/или 134 приборных труб для каждого конкретного регулирующего клапана затрудняет обеспечение того, чтобы резонансная частота приборных труб отличалась и/или была больше, чем частоты возбуждения, порождаемые технологической системой и/или узлом 102 привода. В результате такое приспосабливание к условиям приборных труб может приводить к созданию секции приборных труб, которая может не обладать надежной устойчивостью к ожидаемым вибрациям технологической системы или к повышенным уровням вибрации привода.
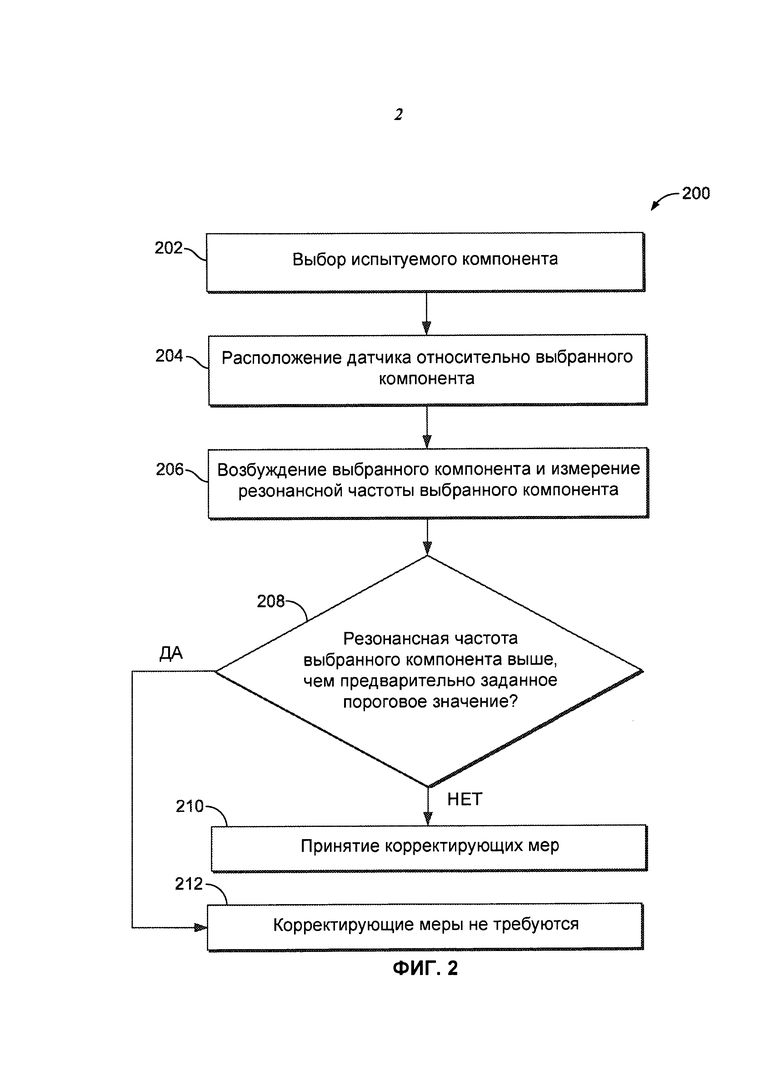
На фиг. 2 показан пример блок-схемы, отображающей типичный способ 200 проверки или оценки виброустойчивости компонента узла регулирующего клапана, такого, например, как узел 100 регулирующего клапана по фиг. 1. Типичный способ 200 по фиг. 2 особенно выгоден для определения резонансной частоты секции приборных труб, которая приспособлена к регулирующему клапану.
После сборки узла регулирующего клапана текучей среды, выбирается компонент узла регулирующего клапана текучей среды, для которого необходимо определение резонансной частоты (блок 202). Компонент узла регулирующего клапана текучей среды может включать в себя длину или секцию приборных труб, которая занимает промежуток между фитингами или приборами. Например, для оценки может быть выбрана секция 128 приборных труб по фиг. 1, которая занимает промежуток между механизмом 114 позиционирования и отключающим клапаном 118.
Хотя типичный способ 200 по фиг. 2 описан в связи с секцией приборных труб, типичный способ 200 по фиг. 2 может также применяться для любого компонента (например, компонентов 112), монтажного держателя, фитинга и/или любого другого устройства управления узлом привода.
После выбора испытуемого компонента или секции приборных труб в блоке 202, датчик располагается на части секции приборных труб или рядом с ней (блок 204). В некоторых вариантах датчик может располагаться относительно ближней средней точки секции труб и/или располагаться относительно любой другой части выбранной секции труб. В других вариантах, хотя положение датчика относительно секции труб не является переменной, чувствительной к измерениям результирующей частоты трубопровода, датчик может располагаться относительно части выбранного компонента или секции приборных труб, которая имеет минимальную величину жесткости, как описано ниже.
Например, датчик может быть акселерометром, оптическим датчиком (например, инфракрасным датчиком, светодиодным датчиком), пьезоэлектрическим датчиком, акустическим датчиком или любым другим датчиком, который может использоваться для регистрации или измерения частоты. Например, если датчик представляет собой оптический датчик, он может располагаться в промежутке между примерно тремя восьмыми дюйма (3/8 дюйма) и двумя дюймами (2 дюйма) от выбранной секции приборных труб, определенной в блоке 202. Датчик может удерживаться вручную оператором относительно выбранной секции труб или может крепиться относительно выбранной секции труб посредством монтажного держателя или другого крепежного устройства. Например, если датчик представляет собой акселерометр, он может присоединяться непосредственно к части выбранной секции приборных труб, определенной в блоке 204. Если датчик представляет собой акустический датчик, микрофон может непосредственно присоединяться или фиксироваться на выбранной секции труб. Как вариант, первый микрофон может присоединяться к первому фитингу, соединенному с первым концом секции труб, а второй микрофон может присоединяться к второму фитингу, соединенному со вторым концом секции труб.
После размещения датчика в блоке 204 затем выбранная секция труб возбуждается посредством, например, возбудителя колебаний (блок 206). Например, выбранная секция труб может возбуждаться вручную посредством возбудителя колебаний (например, резинового молоточка), преобразователя усилия или любого другого подходящего ударного устройства или способа для возбуждения резонанса элементов конструкции в секции приборных труб и обеспечения стабильной частоты колебаний для выбранной секции труб. Датчик передает сигнал, например, к измерительному устройству (например, компьютеру, микропроцессору, ручному измерительному устройству, и др.), которое, в свою очередь, передает или преобразует сигнал, переданный датчиком, в выходные показания, например, колебания в секунду (например, единицы герц). Этот процесс может повторяться для проверки воспроизводимости измеренного значения.
Если выходное значение, переданное измерительным устройством, меньше, чем предварительно заданное пороговое значение (блок 208), требуется принять корректирующие меры для выбранной секции приборных труб (блок 210). Если выходное значение, переданное измерительным устройством, больше, чем предварительно заданное пороговое значение (блок 208), корректирующие меры для выбранной секции приборных труб (которая приспособлена к регулирующему клапану) не требуются (блок 212).
Предварительно заданное пороговое значение может быть больше, чем, например, известная максимальная резонансная частота трубопровода, диапазон частот вибрации, создаваемый узлом регулирующего клапана (например, узлом 102 привода по фиг. 1), и/или известный диапазон частот вибрации, который может создаваться (т.е. усиливаться или повышаться) узлом привода, колеблющегося при собственной резонансной частоте. Например, предварительно заданное пороговое значение может быть резонансной частотой, которая больше, чем, например, минимальное пороговое значение 60 герц, 200 герц и т.д., для приборных труб, имеющих диаметр около (3/8 дюйма). Например, предварительно заданное пороговое значение может быть определено на основании коэффициента безопасности, который может составлять десятикратное значение по отношению к максимальной частоте, которая могла бы производиться ожидаемыми вибрациями технологической системы или узлом привода.
Если измеренная резонансная частота выбранных приборных труб меньше, чем предварительно заданное пороговое значение в блоке 208, необходимы корректирующие меры для выбранных приборных труб, поскольку выбранные приборные трубы могут иметь резонансную частоту, попадающую в диапазон частот колебаний, которые могут передаваться к технологической системе (например, трубопроводу) или которые могут усиливаться или повышаться узлом привода. Иначе говоря, секция приборных труб, имеющая резонансную частоту, меньшую минимального порогового значения, будет резонировать, когда технологическая система или узел привода создает вибрацию, имеющую частоту, практически равную резонансной частоте приборных труб. В результате при эксплуатации в приборных трубах может возникать усталость, отклонения, изгиб или иные повреждения. Как описано ниже, корректирующие меры могу включать в себя изменение изгиба или изменение формы приборных труб, создание опор труб и др. Как указано выше, типичный способ 200 по фиг. 2 может выполняться в заводских условиях или в производственных условиях.
Кроме того, для помощи в определении принимаемых корректирующих мер полезной может оказаться идентификация участка с минимальной жесткостью (и его направления). Например, идентификация участка секции труб, имеющего минимальную величину жесткости, полезна при принятии корректирующих мер, например, различной степени изгиба труб вдоль участка, имеющего минимальную жесткость, и/или поддержки участка секции труб, имеющего минимальную жесткость, с помощью скобы, держателя, стяжки и др. Типичный способ, который может применяться для определения или нахождения того участка выбранной секции труб, который имеет минимальную величину жесткости, включает в себя отклонение вручную выбранной секции приборных труб в каждом направлении со степенью свободы, с которой компонент секции труб может отклоняться или изгибаться. Участок выбранной секции труб, который отклоняется или изгибается в большей степени для данной нагрузки по сравнению с другими участками выбранных приборных труб, как правило, имеет минимальную величину жесткости. Например, средняя точка секции или длины приборных труб, не имеющая опоры, как правило, имеет минимальную величину жесткости.
Хотя это не показано, измерительное устройство может содержать обрабатывающее устройство для приема сигнала, передаваемого датчиком. Кроме того, измерительное устройство может содержать компаратор для сравнения выходных показаний, основанных на сигналах, принятых датчиком, с предварительно заданным пороговым значением (например, из справочной таблицы, из памяти, и др.), и создавать предупреждающий сигнал (например, звуковой предупреждающий сигнал) для оператора, следящего за выбранными трубами, если резонансная частота выбранной секции приборных труб ниже, чем предварительно заданное пороговое значение. После принятия корректирующих мер исправленные приборные трубы можно повторно испытать с помощью типичного способа 200 по фиг. 2.
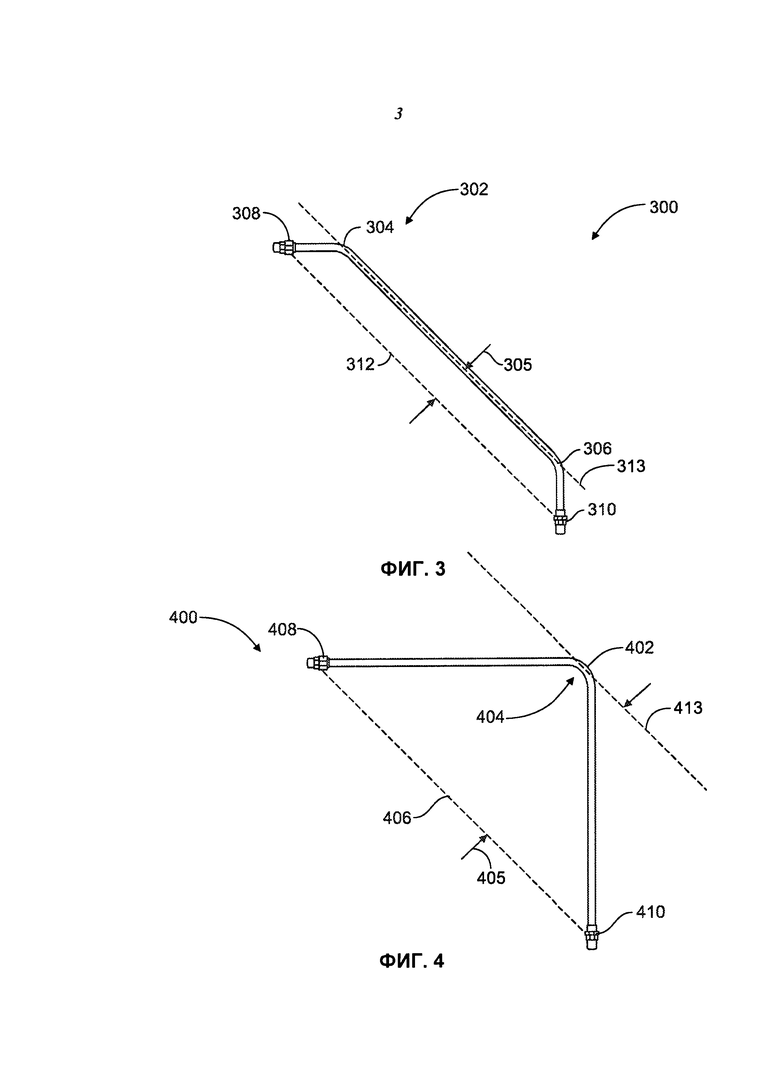
На фиг. 3 изображен вариант секции 300 приборных труб, имеющей сравнительно высокую резонансную частоту. Например, секция 300 приборных труб изображает оптимизированную секцию или длину труб на основании корректирующих мер, подсказанных при использовании типичного способа 200 по фиг. 2. Хотя места установки компонентов или приборов (например, компонентов 112 по фиг. 1) определяют длину или протяженность секции труб, места 302 изгиба труб могут оказывать значительное влияние на резонансную частоту секции 300 труб. Таким образом, корректирующие действия могут включать в себя удаление секции труб, имеющей сравнительно низкую резонансную частоту (например, секция 128 труб по фиг. 1), выпрямление секции труб для по существу устранения любых изгибов и изменение изгиба труб в местах, которые создают сравнительно повышенную резонансную частоту, или оптимизируют длину или секцию труб. Например, тесная связь труб относительно оси 312 фитинга, определяемой фитингами 308 и 310, может обеспечить сравнительно повышенную резонансную частоту. Например, как показано на фиг. 3, показанная секция 300 труб содержит два изгиба 304 и 306 (например, изгибы примерно под углом 45 градусов) рядом с соответствующими фитингами 308 и 310, образуя ось 313 трубы, по существу параллельную оси 312 фитинга, имеющую пространственное разделение 305. В общем случае, уменьшенное пространственное разделение 305 может обеспечить механически более жесткую секцию 300 труб, что приводит к сравнительно повышенной резонансной частоте. Как вариант, корректирующее действие может включать в себя расположение компонентов или приборов, которые соединены посредством приборных труб, относительно тесно друг к другу. Например, механизм 114 позиционирования по фиг. 1 может устанавливаться ближе к отключающему клапану 118, так что секция 128 или 130 приборных труб может иметь меньшую протяженность. Любые другие подходящие корректирующие действия могут включать в себя использование приборных труб, имеющих увеличенный диаметр, труб, имеющих увеличенную толщину стенки, применение монтажных кронштейнов для крепления или поддержки приборных труб приводом 106 и др.
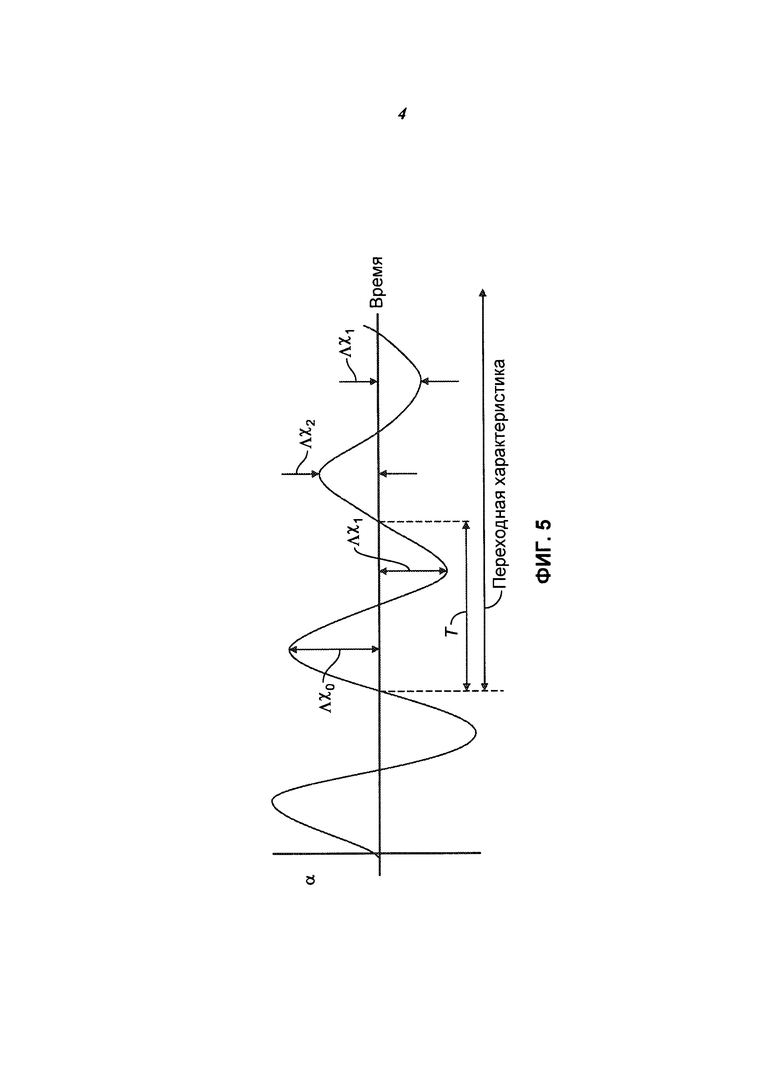
На фиг. 4 изображен вариант секции 400 приборных труб, имеющей сравнительно низкую резонансную частоту. Как показано на фиг. 4, секция 400 труб содержит единственный изгиб 402, составляющий примерно 90 градусов, это приводит к тому, что средняя точка 404 секции 400 труб расположена на значительном расстоянии от линии 406 между фитингами 408 и 410. Увеличенное пространственное разделение 405, определяемое осью 413, образует параллель линии 406 между фитингами 408 и 410, и пересечение средней точки 404 секции 400 труб является намного большим, чем уменьшенное пространственное разделение 305 по фиг. 3. Таким образом, увеличенное пространственное разделение 405 проявляет пониженную резонансную частоту.
В дополнение к определению резонансной частоты компонента узла клапана, типичные способы и устройства, раскрываемые здесь, могут также использоваться для определения или оценки характеристики затухания (например, декремента или коэффициента затухания) компонента (например, секции труб), соединенного с узлом клапана (например, узел 100 регулирующего клапана по фиг. 1). Например, чувствительный элемент или датчик, от которого получается информация о частоте вибрации, может также использоваться для получения характеристик убывания по амплитуде. В частности, при испытаниях компонента, такого как секция труб (например, любая из секций 128, 130 или 134 труб по фиг. 1), для вибрации секции труб, к секции труб может передаваться механическое возбуждение (например, импульс). Датчик может использоваться для контроля смещения труб и, таким образом, может использоваться для отслеживания или регистрации изменяющегося во времени перемещения труб. Трубы будут стремиться к колебанию или смещению при своей резонансной частоте. Кроме того, амплитуда также стремится к убыванию или уменьшению со временем в режиме, совместимом с характеристиками затухания труб. Например, на фиг. 5 приведен пример графика, иллюстрирующего убывание по амплитуде в течение периода времени.
После получения характеристики убывания амплитуды вибрации труб могут использоваться для оценки или определения характеристики затухания, такой как коэффициент затухания. Может использоваться любой известный метод расчета характеристики затухания, в том числе, например, метод логарифмического декремента и/или метод относительного выброса. После определения характеристики затухания для оценки рабочих характеристик труб может быть определена функция преобразования и/или может выполняться анализ методом конечных элементов (МКЭ). Например, анализ МКЭ усталости может использоваться для прогнозирования эксплуатационного срока труб в ожидаемых условиях использования. В общем, характеристики затухания могут использоваться для улучшения или оптимизации эксплуатационного срока различных компонентов, соединенных с узлом гидравлического клапана, для соответствия желаемому эксплуатационному сроку, требованиям надежности и/или циклу технического обслуживания.
На фиг. 6 приведена блок-схема типичной обрабатывающей системы 610, способной исполнять или обрабатывать сигналы от датчиков и/или измерительных устройств в блоках 206 и 208 по фиг. 2.
Обрабатывающая система 610 по данному варианту содержит обрабатывающее устройство 612. Обрабатывающее устройство 612 может быть любым подходящим обрабатывающим устройством, устройством обработки данных или микропроцессором. Хотя это не показано на фиг. 6, обрабатывающая система 610 может быть мультипроцессорной системой и, таким образом, может содержать один или несколько дополнительных обрабатывающих устройств, которые идентичны или аналогичны обрабатывающему устройству 612 и которые коммуникабельно соединены с шиной 618. Например, обрабатывающее устройство 612 может быть реализован с помощью одного или нескольких микропроцессоров или контроллеров любого желаемого семейства или производителя.
Обрабатывающее устройство 612 включает локальную память 613 (например, кэш) и связано с основной памятью, включающей энергозависимую память 614 и энергонезависимую память 616, посредством шины 618. Энергонезависимая память 614 может быть реализована с помощью синхронного динамического запоминающего устройства с произвольной выборкой (SDRAM), динамического запоминающего устройства с произвольной выборкой (DRAM), динамического запоминающего устройства с произвольной выборкой фирмы RAMBUS (RDRAM) и/или любого другого типа устройства памяти с произвольным доступом. Энергонезависимая память 616 может быть реализована с помощью флэш-памяти и/или другого желаемого типа устройства памяти.
Обрабатывающая система 610 также содержит схему интерфейса 620. Схема интерфейса 620 может быть реализована с помощью любого типа интерфейсного стандарта, такого как интерфейс Ethernet, универсальная последовательная шина (USB) и/или последовательный интерфейс PCI express.
Одно или несколько входных устройств 622 соединены со схемой интерфейса 620. Входные устройства 622 дают пользователю возможность вводить данные и команды в обрабатывающее устройство 612. Входные устройства могут быть реализованы, например, с помощью клавиатуры, мыши, сенсорного экрана и/или системы распознавания речи.
Одно или несколько выходных устройств 624 также соединены со схемой интерфейса 620. Выходные устройства 624 могут быть реализованы, например, с помощью индикаторных устройств (например, жидкокристаллический дисплей, дисплей на электронно-лучевой трубке (CRT), принтер и/или динамики). Схема интерфейса 620, таким образом, как правило, содержит карту графического драйвера.
Схема интерфейса 620 также содержит устройство связи, такое как модем или сетевая интерфейсная плата, для осуществления обмена данными с внешними компьютерами через сеть 626 (например, Ethernet-соединение, цифровая абонентская линия связи (DSL), телефонная линия, коаксиальный кабель, система сотовой телефонной связи и др.) для осуществления связи обрабатывающей системы 610 с другой обрабатывающей системой.
Обрабатывающая система 600 также содержит одно или несколько запоминающих устройств 628 для хранения программ и данных. Примеры таких запоминающих устройств 628 включают в себя накопители на гибких дисках, накопители на жестких дисках, накопители на компакт-дисках и накопители на универсальных цифровых дисках (DVD).
Кодированные инструкции измерительного устройства и/или обрабатывающего устройства могут храниться в запоминающем устройстве 625, в энергозависимой памяти 614, в энергонезависимой памяти 616 и/или на сменном запоминающем носителе, таком как компакт-диск или цифровой видеодиск 632.
Хотя в настоящем документе раскрыты определенные варианты способов и устройств, объем защиты данного патента не ограничивается ими. Наоборот, данный патент охватывает все способы, устройства и изделия, явно подпадающие под объем защиты прилагаемой формулы, буквально или согласно доктрине эквивалентов.
Использование: для оценки виброустойчивости компонента регулирующего клапана текучей среды. Сущность изобретения заключается в том, что в изобретении раскрыты способы и устройства для оценки виброустойчивости компонента регулирующего клапана текучей среды. Типичный способ, раскрываемый здесь, включает в себя выбор компонента регулирующего клапана текучей среды и расположение датчика относительно выбранного компонента. Способ также включает в себя механическое возбуждение выбранного компонента, определение резонансной частоты выбранного компонента и выполнение корректирующих мер, основанных на резонансной частоте выбранного компонента. Технический результат: обеспечение возможности оценки виброустойчивости компонента регулирующего клапана текучей среды. 3 н. и 23 з.п. ф-лы, 6 ил.
1. Способ оценки виброустойчивости компонента клапана для улучшения срока службы этого компонента, включающий в себя:
выбор компонента регулирующего клапана текучей среды;
расположение датчика относительно выбранного компонента;
механическое возбуждение выбранного компонента;
определение резонансной частоты выбранного компонента и
выполнение корректирующих мер, основанных на резонансной частоте выбранного компонента.
2. Способ по п. 1, кроме того, включающий в себя обработку сигналов, созданных датчиком, для определения резонансной частоты выбранного компонента в единицах герц.
3. Способ по п. 1, кроме того, включающий в себя сравнение резонансной частоты выбранного компонента с предварительно заданным пороговым значением, причем предварительно заданное пороговое значение больше, чем ожидаемая частота вибраций, которая может передаваться к приводу.
4. Способ по п. 1, при котором механическое возбуждение выбранного компонента включает в себя силовое воздействие на него.
5. Способ по п. 1, при котором корректирующие меры включают в себя изменение конфигурации выбранного компонента для получения сравнительно повышенной резонансной частоты.
6. Способ по п. 1, при котором выбранный компонент содержит секцию труб.
7. Способ по п. 6, при котором изменение конфигурации секции труб для получения относительно повышенной резонансной частоты включает в себя изгиб трубы для получения по меньшей мере двух изгибов.
8. Способ по п. 1, кроме того, включающий в себя определение участка выбранного компонента, имеющего минимальную величину жесткости, при принятии корректирующих мер.
9. Способ по п. 8, при котором определение участка выбранного компонента, имеющего минимальную величину жесткости, включает в себя отклонение вручную выбранного компонента.
10. Способ по п. 1, при котором расположение датчика относительно выбранного компонента включает в себя расположение датчика примерно в средней точке длины или пролета трубы.
11. Способ по п. 1, кроме того, включающий в себя обработку сигналов датчика для определения коэффициента затухания выбранного компонента.
12. Способ по п. 11, кроме того, включающий в себя использования коэффициента затухания для прогнозирования эксплуатационного срока службы выбранного компонента.
13. Способ по п. 11, при котором обработка сигналов включает в себя использование метода логарифмического декремента или метода относительного выброса.
14. Способ по п. 1, при котором выбор компонента включает в себя выбор по меньшей мере одного из элементов: секции труб, монтажного держателя или фитинга регулирующего клапана.
15. Способ оценки виброустойчивости компонента клапана, включающий в себя:
выбор секции приборных труб, приспособленных к клапану;
возбуждение выбранной секции труб;
контроль изменяющегося во времени перемещения выбранной секции труб при возбуждении и
измерение амплитуды изменяющегося во времени перемещения выбранной секции труб.
16. Способ по п. 15, при котором контроль изменяющегося во времени перемещения выбранной секции труб включает в себя расположение датчика рядом с выбранной секцией труб.
17. Способ по п. 15, при котором контроль изменяющегося во времени перемещения выбранной секции труб включает в себя расположение первого датчика рядом с первым концом выбранной секции труб и расположение второго датчика рядом со вторым концом выбранной секции труб.
18. Способ по п. 15, кроме того, включающий в себя определение участка выбранной секции труб, имеющего минимальную величину жесткости.
19. Способ по п. 18, при котором определение участка выбранной секции труб, имеющего минимальную величину жесткости, включает в себя отклонение вручную выбранной секции труб в каждом направлении со степенью свободы, с которой компонент секции труб может отклоняться или изгибаться.
20. Способ по п. 15, кроме того, включающий в себя определение резонансной частоты, основываясь на амплитуде изменяющегося во времени перемещения выбранной секции труб.
21. Способ по п. 20, кроме того, включающий в себя сравнение резонансной частоты изменяющегося во времени перемещения с минимальным пороговым значением резонансной частоты узла привода.
22. Способ по п. 21, кроме того, включающий в себя принятие корректирующих мер, если резонансная частота выбранных труб меньше, чем минимальное пороговое значение, путем удаления выбранных труб, удаления любых изгибов в выбранных трубах и изменение изгиба труб в местах, которые создают сравнительно повышенную резонансную частоту.
23. Способ по п. 15, кроме того, включающий в себя получение характеристик убывания, основанных на амплитуде изменяющегося во времени перемещения выбранной секции труб, и оценку коэффициента затухания труб.
24. Способ по п. 23, кроме того, включающий в себя использование метода логарифмического декремента для оценки коэффициента затухания.
25. Способ по п. 23, кроме того, включающий в себя выполнение анализа усталости методом конечных элементов на основании оценочного коэффициента затухания для прогнозирования эксплуатационного срока службы секции труб.
26. Устройство для оценки виброустойчивости компонента клапана, содержащее:
датчик для измерения изменяющегося во времени перемещения, размещаемый рядом с выбранным компонентом узла регулирующего клапана;
возбудитель колебаний для создания частоты вибрации выбранного компонента и обрабатывающее устройство для приема сигналов, создаваемых датчиком, и преобразования сигналов в выходной сигнал для определения резонансной частоты выбранного компонента.
| US 2010324839A1, 23.12.2010 | |||
| US 2010324839A1, 23.12.2010 | |||
| US 2010324839A1, 23.12.2010 | |||
| US 2011030806A1, 10.02.2011 | |||
| US 7290450B2, 06.11.2007 | |||
| US 7549336B2, 23.06.2009 | |||
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИКИ СОСТОЯНИЯ ТРУБОПРОВОДА | 2008 |
|
RU2350833C1 |
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИКИ СОСТОЯНИЯ ТРУБОПРОВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2345344C1 |

