Изобретение относится к устройствам пожаротушения, а именно к роботизированным установкам пожаротушения.
Прототипом является роботизированная установка пожаротушения, включающая в себя пожарный ствол, подключенный к пожарному трубопроводу, снабженный приводами вертикального и горизонтального наведения, насадок с приводом подачи огнетушащего вещества, устройство обнаружения загорания и устройство программного управления, при этом между пожарным стволом и пожарным трубопроводом дополнительно установлен двухколенчатый патрубок с шарнирным соединением и приводом горизонтального наведения [Пат. РФ 2412732, МПК А62С 31/00, А62С 37/00, 2011].
Недостатками прототипа являются:
- сложная конструкция установки, обусловленная большим числом деталей, узлов и приводов;
- большое энергопотребление и значительный момент инерции, связанные с вращением пожарного ствола вместе с вертикальным приводом и редуктором;
- сложность в эксплуатации, вызванная обслуживанием большого числа узлов, а также относительно высоким расположением центра тяжести ствола с приводами, что ограничивает угол подъема (наклона) установки при ее движении из-за возможного опрокидывания.
Задачей изобретения является упрощение конструкции, снижение энергопотребления, повышение надежности и улучшение эксплуатационных характеристик.
Задача решается тем, что в роботизированной установке пожаротушения, включающей в себя платформу, пожарный ствол, подсоединенный двухколенчатым патрубком к пожарному трубопроводу, размещенный на платформе и снабженный приводами вертикального и горизонтального наведения, по крайней мере, часть механизма вертикального наведения выполнена в виде двух червяков со скрещивающимися взаимно перпендикулярными осями и червячного колеса, которое жестко закреплено на оси одного червяка, размещенного на платформе и взаимодействующего с зубчатым колесом, которое жестко связано с пожарным стволом и сопряжено с другим червяком, ось которого совмещена с вертикальной осью поворота платформы.
По крайней мере, часть механизма горизонтального наведения выполнена в виде червячной передачи. Один червяк выполнен глобоидным. Червячное колесо размещено в средней плоскости червяка, взаимодействующего с зубчатым колесом. Червячная передача выполнена самотормозящейся. Червяк намагничен в радиальном направлении. Червяк, ось которого совмещена с вертикальной осью поворота платформы, выполнен пустотелым. Часть двухколенчатого патрубка выполнена заодно с пустотелым червяком.
Указанные отличительные признаки позволяют достичь следующих преимуществ по сравнению с прототипом.
Выполнение, по крайней мере, части механизма вертикального наведения в виде двух червяков со скрещивающимися взаимно перпендикулярными осями и червячного колеса, которое жестко закреплено на оси одного червяка, размещенного на платформе и взаимодействующего с зубчатым колесом, жестко связанным с пожарным стволом, и сопряжено с другим червяком, ось которого совмещена с вертикальной осью поворота платформы, позволяет размещать двигатели, перемещающие пожарный ствол, вне платформы. Это упрощает конструкцию, снижает весогабаритные характеристики поворачивающихся частей, а также их момент инерции, что уменьшает энергопотребление, дает возможность применять менее мощный двигатель, улучшая тем самым также и эксплуатационные характеристики. Кроме того, происходит снижение центра тяжести установки и упрощается подвод энергии к приводам, которые установлены неподвижно.
Выполнение, по крайней мере, части механизма горизонтального наведения в виде червячной передачи упрощает конструкцию и повышает точность наведения пожарного ствола, что повышает надежность и улучшает эксплуатационные характеристики.
Выполнение одного червяка глобоидным и размещение червячного колеса в средней плоскости червяка, взаимодействующего с зубчатым колесом, уменьшает весогабаритные характеристики механизма.
Выполнение червячной передачи самотормозящейся позволяет автоматически фиксировать платформу и пожарный ствол после отключения двигателей, что упрощает конструкцию и улучшает эксплуатационные характеристики.
Намагничивание червяка в радиальном направлении позволяет использовать его в качестве датчика угла поворота пожарного ствола, разместив при этом рядом с червяком, например, геркон или датчик Холла. Это упрощает конструкцию и повышает ее надежность.
Выполнение червяка, ось которого совмещена с вертикальной осью поворота платформы, пустотелым позволяет использовать его в качестве трубы и осуществлять через нее подачу огнетушащего вещества. Это улучшает эксплуатационные характеристики и упрощает конструкцию.
Выполнение части двухколенчатого патрубка заодно с пустотелым червяком упрощает конструкцию установки и повышает ее надежность.
Изобретение поясняется чертежами.
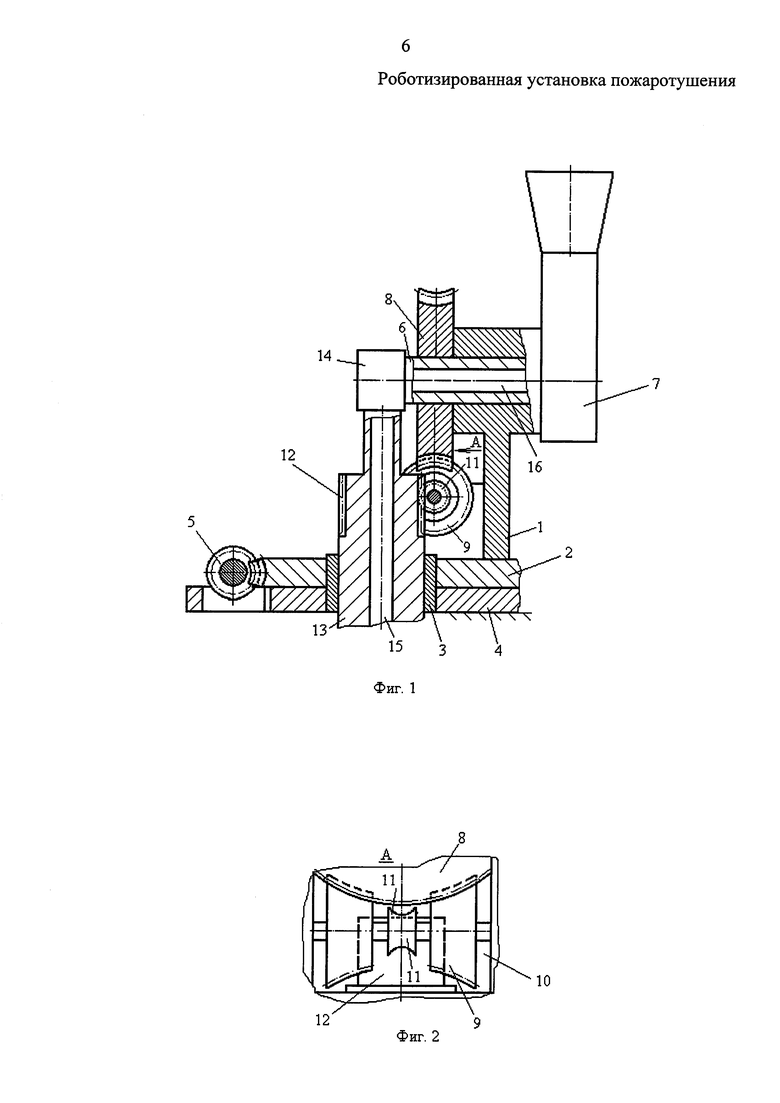
На фиг. 1 изображена схема роботизированной установки пожаротушения. На фиг. 2 изображен вид А установки.
Роботизированная установка пожаротушения содержит платформу 1, закрепленную на червячном зубчатом колесе 2, установленным с возможностью поворота на втулке 3, неподвижно закрепленной на основании 4, и сопряженным с червяком 5, соединенным с первым двигателем (не показан) и вращающимся в опорах основания. На платформе с возможностью вращения установлена ось 6, на которой неподвижно закреплены пожарный ствол 7 и зубчатое колесо 8, взаимодействующее с зубьями глобоидного червяка 9, который установлен в пазу (проеме) 10 платформы 1 с возможностью осевого вращения и имеет жестко закрепленное на оси червячное колесо 11, сопряженное с червяком 12, вал 13 которого установлен во втулке 3 с возможностью вращения и соединен со вторым двигателем (не показан), закрепленным на основании 4. Червяк 12 и ось 6, являющиеся соответственно первым и вторым коленами двухколенчатого патрубка, одними концами подвижно соединены между собой полым шарниром (муфтой) 14 и имеют каналы 15, 16, соединяющие пожарный ствол с источником тушащего вещества.
Работает роботизированная установка пожаротушения следующим образом.
Для поворота пожарного ствола 7 вокруг вертикальной оси включают первый двигатель, в результате чего червяк 5 начинает вращаться и поворачивать на втулке 3 зубчатое колесо 2 вместе с платформой 1 (фиг. 1). При этом червячное колесо 11 своими зубьями будет скользить по винтовой поверхности неподвижного червяка 12 (обкатываться вокруг него) и поворачиваться. Если угол поворота платформы 1 небольшой, а передаточное отношение от червяка 12 до зубчатого колеса 8, наоборот, большое, то колесо 11 будет практически стоять на месте при повороте платформы, тем более не будет перемещаться зубчатое колесо 8 с осью 6 и пожарным стволом 7. В случае необходимости угол перемещения пожарного ствола можно учесть или скомпенсировать поворотом червяка 12 в направлении вращения платформы 1. При достижении пожарным стволом нужного азимута выключают двигатель, обеспечивая за счет самоторможения червячной передачи фиксацию.
Для поворота пожарного ствола 7 вокруг горизонтальной оси включают второй двигатель, благодаря чему начинают вращаться вал 13 с червяком 12, который посредством зубчатого колеса 11 и связанного с ним червяка 9 поворачивает зубчатое колесо 8 с осью 6 и пожарным стволом 7 (фиг. 2). При этом соединенные посредством шарнира 14 концы червяка и оси проворачиваются в шарнире. После поворота пожарного ствола до требуемого положения производят его фиксирование путем выключения двигателя. После этого подают огнетушащее вещество в канал 15, которое через полый шарнир 14 и канал 16 оси 6 поступает в пожарный ствол 7. В случае необходимости вращение последнего вокруг вертикальной и горизонтальной осей можно производить одновременно обоими двигателями.
Заметим также, что, так как первый и второй двигатели размещены на основании 4, то механизм управления пожарным стволом получается максимально облегченным, что позволяет использовать двигатели малой мощности на перемещение ствола, положение которого можно легко «запоминать» по количеству оборотов червяков, разместив при этом рядом с ними, например, геркон или датчик Холла.
Внедрение изобретения позволит создать простую по конструкции, надежную и удобную в эксплуатации роботизированную установку пожаротушения, которая потребляет мало энергии в процессе своей работы, имеет малые габариты и смещенный вниз центр тяжести.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАКЕТНО-АРТИЛЛЕРИЙСКАЯ УСТАНОВКА | 2014 |
|
RU2564688C1 |
| Опорно-поворотное устройство антенны | 2017 |
|
RU2659181C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СПАРЕННЫМ ПУЛЕМЕТОМ | 2015 |
|
RU2595055C1 |
| ПОДЪЕМНЫЙ КРАН | 2014 |
|
RU2566580C1 |
| СПОСОБ ЗАРЯЖАНИЯ ПУШКИ ТАНКА И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2577744C1 |
| СИСТЕМА СЛЕЖЕНИЯ ЗА СОЛНЦЕМ | 2014 |
|
RU2558665C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СПАРЕННЫМ ПУЛЕМЕТОМ | 2016 |
|
RU2642222C2 |
| ВЫСТАВНАЯ СДВИЖНАЯ ДВЕРЬ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2559387C1 |
| МОСТОУКЛАДЧИК | 2015 |
|
RU2600245C1 |
| АВТОМАТ ЗАРЯЖАНИЯ ПУШКИ ТАНКА | 2015 |
|
RU2602005C1 |
Изобретение относится к устройствам пожаротушения, а именно к роботизированным установкам пожаротушения. Задачей изобретения является упрощение конструкции, снижение энергопотребления, повышение надежности и улучшение эксплуатационных характеристик. Для поворота пожарного ствола 7 вокруг вертикальной оси включают первый двигатель, в результате чего червяк 5 начинает вращаться и поворачивать на втулке 3 зубчатое колесо 2 с платформой 1. При достижении пожарным стволом 7 нужного азимута выключают двигатель, обеспечивая за счет самоторможения червячной передачи его фиксацию. Для поворота пожарного ствола 7 вокруг горизонтальной оси включают второй двигатель, благодаря чему начинают вращаться вал 13 с червяком 12, который посредством зубчатого колеса 11 и связанного с ним червяка 9 поворачивает зубчатое колесо 8 с осью 6 и пожарным стволом 7. После поворота последнего до требуемого положения производят его фиксирование путем выключения двигателя. После этого подают огнетушащее вещество в канал 15, которое через полый шарнир 14 и канал 16 оси 6 поступает в пожарный ствол 7. 7 з.п. ф-лы, 2 ил.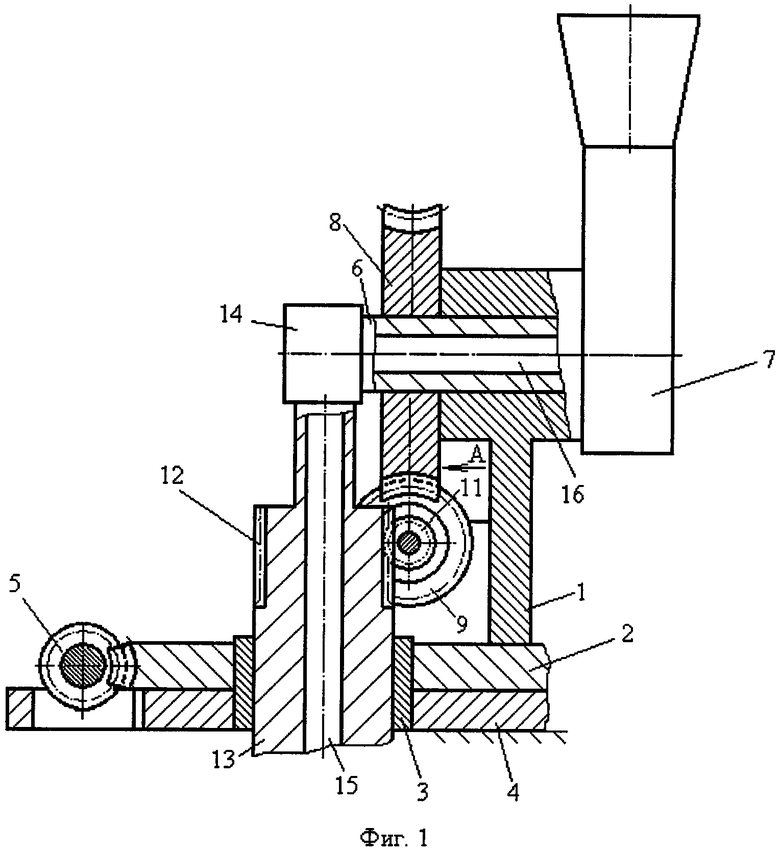
1. Роботизированная установка пожаротушения, включающая в себя платформу, пожарный ствол, подсоединенный двухколенчатым патрубком к пожарному трубопроводу, размещенный на платформе и снабженный приводами вертикального и горизонтального наведения, отличающаяся тем, что, по крайней мере, часть механизма вертикального наведения выполнена в виде двух червяков со скрещивающимися взаимно перпендикулярными осями и червячного колеса, которое жестко закреплено на оси одного червяка, размещенного на платформе и взаимодействующего с зубчатым колесом, которое жестко связано с пожарным стволом и сопряжено с другим червяком, ось которого совмещена с вертикальной осью поворота платформы.
2. Установка по п. 1, отличающаяся тем, что, по крайней мере, часть механизма горизонтального наведения выполнена в виде червячной передачи.
3. Установка по п. 1, отличающаяся тем, что один червяк выполнен глобоидным.
4. Установка по п. 1, отличающаяся тем, что червячное колесо размещено в средней плоскости червяка, взаимодействующего с зубчатым колесом.
5. Установка по п. 1, отличающаяся тем, что червячная передача выполнена самотормозящейся.
6. Установка по п. 1, отличающаяся тем, что червяк намагничен в радиальном направлении.
7. Установка по п. 1, отличающаяся тем, что червяк, ось которого совмещена с вертикальной осью поворота платформы, выполнен пустотелым.
8. Установка по любому из пп. 1, 7, отличающаяся тем, что часть двухколенчатого патрубка выполнена заодно с пустотелым червяком.
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ | 2010 |
|
RU2412732C1 |
| CN 103239356 A, 14.08.2013 | |||
| JPH 08191899 A, 30.07.1996 | |||
| US 7810765 B2, 12.10.2010. | |||

