Изобретение относится к области военной техники, в частности к конструкциям установок, обеспечивающих наведение оружия в горизонтальной и вертикальной плоскостях.
Прототипом является комплекс автоматического оружия, содержащий станок с подвижной и неподвижной частями, оружие и приводы горизонтального и вертикального наведения, отличающийся тем, что исполнительные механизмы приводов горизонтального и вертикального наведения выполнены в виде раздвоенных редукторов, привод горизонтального наведения закреплен на неподвижной части станка и на его выходном валу установлен привод вертикального наведения, связанный с подвижной частью станка [Пат. РФ 2384809, МПК F41A 27/00, 2010].
Недостатками прототипа являются:
- сложная конструкция исполнительных механизмов, обусловленная наличием большого числа деталей;
- относительно большое энергопотребление и значительный момент инерции подвижной части станка, вызванные вращением подвижной части вместе с приводом вертикального наведения и редуктором;
- сложность в эксплуатации, связанная с обслуживанием большого числа узлов.
Задачей изобретения является упрощение конструкции, снижение энергопотребления, повышение надежности и улучшение эксплуатационных характеристик.
Задача решается тем, что в устройстве автоматического управления спаренным пулеметом, содержащем станок с подвижной и неподвижной частями, установку с оружием, размещенную на подвижной части, закрепленный на неподвижной части привод горизонтального наведения, привод вертикального наведения и исполнительные механизмы приводов, кинематически связывающие привода с установкой, по крайней мере, часть механизма вертикального наведения выполнена в виде двух червяков со скрещивающимися взаимно перпендикулярными осями и червячного колеса, которое жестко закреплено на оси одного червяка, размещенного на подвижной части и взаимодействующего с зубчатым колесом, жестко связанным с установкой, и сопряжено с другим червяком, ось которого совмещена с вертикальной осью поворота подвижной части. Привод вертикального наведения размещен на неподвижной части станка. Один червяк выполнен глобоидным. Червячное колесо размещено в средней плоскости червяка, взаимодействующего с зубчатым колесом. Червячная передача выполнена самотормозящейся. Червяк намагничен. Червяк, ось которого совмещена с вертикальной осью поворота подвижной части, выполнен пустотелым. Часть червяка, ось которого совмещена с вертикальной осью поворота подвижной части, выполнена в виде электрического контакта, установленного с возможностью проворота относительно червяка. Установка в зоне механизма вертикального наведения выполнена в виде масляной ванны. Подвижная часть станка выполнена в виде патронной коробки. Часть спускового механизма оружия выполнена в виде электромагнита, один конец обмотки которого соединен с «массой» подвижной части, а другой - с электрическим контактом. Электрический контакт выполнен с односторонней проводимостью.
Указанные отличительные признаки позволяют достичь следующих преимуществ по сравнению с прототипом.
Выполнение, по крайней мере, части механизма вертикального наведения в виде двух червяков со скрещивающимися взаимно перпендикулярными осями и червячного колеса, которое жестко закреплено на оси одного червяка, размещенного на подвижной части и взаимодействующего с зубчатым колесом, жестко связанным с установкой, и сопряжено с другим червяком, ось которого совмещена с вертикальной осью поворота подвижной части, позволяет размещать двигатель, перемещающий установку, вне вращающихся частей. Это упрощает конструкцию, снижает весогабаритные характеристики поворачивающихся частей и их момент инерции, уменьшая энергопотребление, дает возможность применять менее мощный двигатель, улучшая, тем самым, также и эксплуатационные характеристики.
Выполнение одного червяка глобоидным и размещение червячного колеса в средней плоскости червяка, взаимодействующего с зубчатым колесом, уменьшает весогабаритные характеристики механизма.
Выполнение червячной передачи самотормозящейся позволяет автоматически фиксировать установку после отключения двигателя, что упрощает конструкцию и улучшает эксплуатационные характеристики.
Намагничивание червяка, например в радиальном направлении, позволяет использовать его в качестве датчика угла поворота установки, разместив рядом с ним геркон или датчик Холла. Это упрощает конструкцию и повышает ее надежность.
Выполнение червяка, ось которого совмещена с вертикальной осью поворота подвижной части, пустотелым позволяет использовать его в качестве трубы, в которой можно осуществлять прокладку электрического (оптического) информационного (управляющего) кабеля, пропускать различные элементы, например контакт, дополнительный вращающийся вал или осуществлять подачу через нее рабочего тела (воздуха, жидкости) для функционирования устройств, расположенных на установке. Это улучшает эксплуатационные характеристики.
Выполнение части червяка, ось которого совмещена с вертикальной осью поворота подвижной части, в виде электрического контакта, установленного с возможностью проворота относительно червяка, также улучшает эксплуатационные характеристики, поскольку позволяет поворачивать подвижную часть вокруг вертикальной оси на любой угол, не запутывая при этом соедингительные провода.
Выполнение установки в зоне механизма вертикального наведения в виде масляной ванны улучшает условия работы этого механизма.
Выполнение подвижной части станка в виде патронной коробки позволяет значительно увеличить запас патронов, вставленных в патронную ленту, уложенную, например, кипой на дне коробки, поскольку размер этой коробки ограничен только корпусом объекта, на который устанавливается данный спаренный пулемет. Большой запас патронов особенно важен в мобильных автоматизированных робототехнических комплексах.
Выполнение части спускового механизма оружия в виде электромагнита, один конец обмотки которого соединен с «массой» подвижной части, а другой - с электрическим контактом, позволяет дистанционно управлять работой пулеметов, размещенных на вращающейся установке, что упрощает конструкцию и повышает эксплуатационные характеристики.
Выполнение электрического контакта с односторонней проводимостью позволяет управлять работой каждого пулемета в отдельности. Если к обмоткам электромагнитов спусковых механизмов подключить электрические контакты разной проводимости, то подача напряжения положительной полярности (по единому для обоих проводнику) будет приводить в действие один пулемет, отрицательной - другой, а импульсы обеих полярностей приведет в работу оба пулемета. При этом «масса» станка должна быть изолирована от «массы» объекта, на который устанавливается станок в случае, если «масса» объекта находится под напряжением.
Изобретение поясняется чертежами.
На фиг. 1 изображена схема устройства автоматического управления спаренным пулеметом. На фиг. 2 изображен вид А устройства. На фиг. 3 изображена схема подключения электромагнитов спусковых механизмов оружия.
Устройство автоматического управления спаренным пулеметом содержит подвижную (поворотную) часть 1 станка, закрепленную на зубчатом колесе 2, установленном с возможностью поворота на втулке 3, закрепленной на неподвижной части 4 станка, и кинематически связанном с приводом горизонтального наведения (не показан), соединенным с первым двигателем (не показан) и вращающимся заодно с патронной коробкой 5. На подвижной части с возможностью вращения установлена ось 6, на которой неподвижно закреплены установка 7 для размещения оружия и зубчатое колесо 8, взаимодействующее с зубьями глобоидного червяка 9, который установлен в пазу 10 подвижной части 1 с возможностью осевого вращения и имеет жестко закрепленное на оси червячное колесо И, сопряженное с червяком 12, вал 13 которого установлен во втулке 3 с возможностью вращения и соединен со вторым двигателем (не показан), закрепленным на неподвижной части. Червяк 12 может быть пустотелым и иметь соосно установленный с возможностью проворота контакт 14, который тоже может быть полым. В патронной коробке, например кипами, могут быть уложены патронные ленты 15 соответственно для одного и другого пулеметов, спусковые механизмы которых могут соответственно иметь электромагниты 16, 17, одни концы обмоток которых соединены с «массой» станка, а другие через анод и катод диодов 18,19 подключены к контакту 14.
Работает устройство автоматического управления спаренным пулеметом следующим образом.
Для поворота установки 7 вокруг вертикальной оси включают горизонтальный привод, в результате чего зубчатое колесо 2 вместе с подвижной частью 1 станка и с патронной коробкой 5 начинает вращаться (фиг. 1). При этом червячное колесо 11 своими зубьями будет скользить по винтовой поверхности неподвижного червяка 12 (обкатываться вокруг него) и поворачиваться. Если угол поворота подвижной части 1 небольшой, а передаточное отношение от червяка 12 до зубчатого колеса 8, наоборот, большое, то колесо 11 будет практически стоять на месте при повороте подвижной части, тем более не будет перемещаться зубчатое колесо 8 с осью 6 и установкой 7. В случае необходимости угол перемещения установки в вертикальной плоскости можно учесть или скомпенсировать поворотом червяка 12 в направлении вращения подвижной части 1. При достижении установкой 7 нужного азимута выключают горизонтальный привод, фиксирование подвижной части можно обеспечить, применяя самотормозящуюся червячную передачу.
Для поворота установки 7 вокруг горизонтальной оси включают вертикальный привод, благодаря чему начинают вращаться вал 13 с червяком 12, который посредством зубчатого колеса 11 и связанного с ним червяка 9 поворачивает зубчатое колесо 8 с осью 6 и установкой 7 (фиг. 2). После поворота до требуемого положения производят фиксирование установки выключением привода. В случае необходимости вращение установки 7 вокруг вертикальной и горизонтальной осей можно производить одновременно обоими приводами. Заметим, что при значительной нагрузке на колесо 8 при сильной отдаче во время работы пулеметов, слева от червяка 12 можно разместить аналогичные глобоидный червяк (с противоположной навивкой) и зубчатое колесо 8, усилив механизм вертикального перемещения. Кроме того, если при этом ось 6 разделить на две части, т.е. сделать полуоси, и сопрячь червяка с противоположной навивкой с дополнительным червяком, пропущенным через вал 13, то можно управлять пулеметами в вертикальной плоскости раздельно.
После этого через контакт 14 (стержень), который может быть, например, закреплен на установке 7, подают напряжение на электромагниты механизмов спуска (фиг. 3). Если раздельная работа пулеметов не требуется, то подача осуществляется знакопеременными импульсами (или просто подачей напряжения на оба электромагнита, если диоды 18, 19 вовсе отсутствуют). При раздельной работе подают напряжение нужной полярности (или используют два контакта 14, выполненных, например, коаксиально). Заметим также, что, так как горизонтальный и вертикальный приводы размещены на неподвижной части 4, то механизм управления установкой получается максимально облегченным, что позволяет использовать в приводах двигатели малой мощности на перемещение установки 7 вместе с патронной коробкой. Положение установки можно легко «запоминать» по количеству оборотов червяков, разместив при этом рядом с ними, например геркон или датчик Холла.
Внедрение изобретения позволит создать простое, надежное и удобное в эксплуатации устройство автоматического управления спаренным пулеметом, которое может быть установлено на мобильном робототехническом комплексе.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СПАРЕННЫМ ПУЛЕМЕТОМ | 2016 |
|
RU2642222C2 |
| РАКЕТНО-АРТИЛЛЕРИЙСКАЯ УСТАНОВКА | 2014 |
|
RU2564688C1 |
| МОСТОУКЛАДЧИК | 2015 |
|
RU2600245C1 |
| СИСТЕМА СЛЕЖЕНИЯ ЗА СОЛНЦЕМ | 2014 |
|
RU2558665C1 |
| ПОДЪЕМНЫЙ КРАН | 2014 |
|
RU2566580C1 |
| МЕХАНИЗМ УБОРКИ-ВЫПУСКА ШАССИ САМОЛЕТА | 2015 |
|
RU2609573C1 |
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 2016 |
|
RU2611675C1 |
| МЕХАНИЗМ ПУЛЕМЕТА И СПОСОБ ЕГО РАБОТЫ | 2016 |
|
RU2621517C1 |
| ГОЛОВКА ДЛЯ АБРАЗИВОСТРУЙНОЙ ОЧИСТКИ ПОВЕРХНОСТЕЙ | 2016 |
|
RU2621493C1 |
| ПОДЪЕМНЫЙ КРАН СО СКЛАДЫВАЮЩЕЙСЯ СТРЕЛОЙ | 2014 |
|
RU2566576C1 |

Изобретение относится к области военной техники, а именно к устройствам автоматического управления спаренными пулеметами. Устройство автоматического управления спаренным пулеметом содержит станок с подвижной и неподвижной частями, установку с оружием, размещенную на подвижной части, закрепленный на неподвижной части привод горизонтального наведения, привод вертикального наведения и исполнительные механизмы приводов. Часть механизма вертикального наведения выполнена в виде двух червяков со скрещивающимися взаимно перпендикулярными осями и червячного колеса. Червячное колесо жестко закреплено на оси одного червяка, размещенного на подвижной части и взаимодействующего с зубчатым колесом, жестко связанным с установкой, и сопряжено с другим червяком, ось которого совмещена с вертикальной осью поворота подвижной части. Достигается упрощение конструкции, снижение энергопотребления, повышение надежности и улучшение эксплуатационных характеристик. 11 з.п. ф-лы, 3 ил.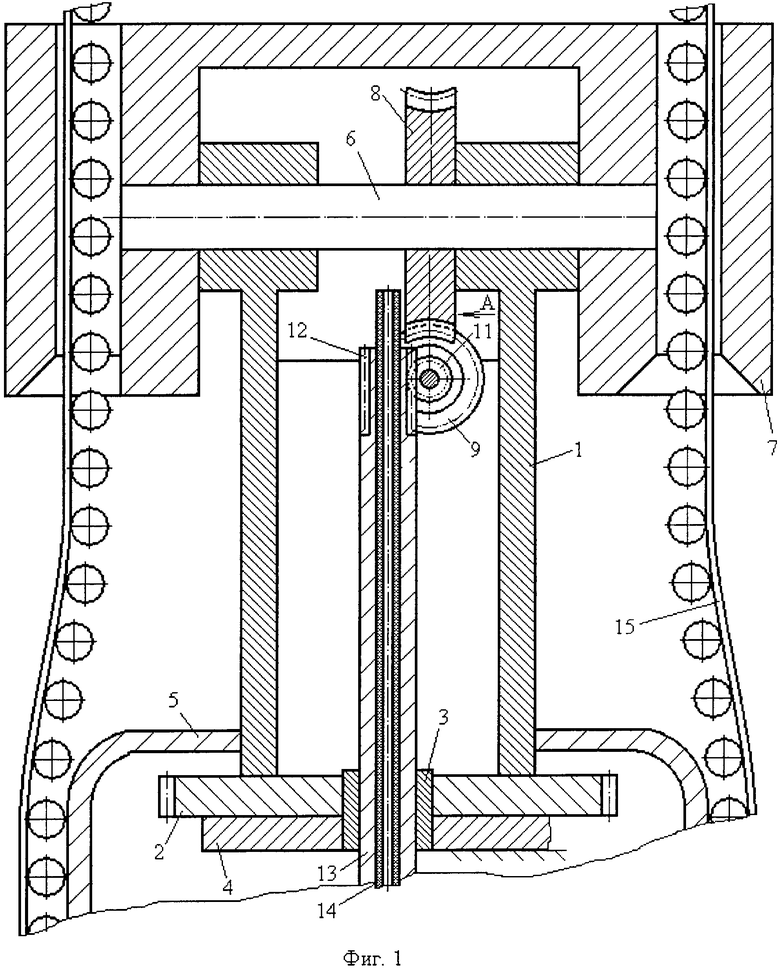
1. Устройство автоматического управления спаренным пулеметом, содержащее станок с подвижной и неподвижной частями, установку с оружием, размещенную на подвижной части, закрепленный на неподвижной части привод горизонтального наведения, привод вертикального наведения и исполнительные механизмы приводов, кинематически связывающие привода с установкой, отличающееся тем, что, по крайней мере, часть механизма вертикального наведения выполнена в виде двух червяков со скрещивающимися взаимно перпендикулярными осями и червячного колеса, которое жестко закреплено на оси одного червяка, размещенного на подвижной части и взаимодействующего с зубчатым колесом, жестко связанным с установкой, и сопряжено с другим червяком, ось которого совмещена с вертикальной осью поворота подвижной части.
2. Устройство по п. 1, отличающееся тем, что привод вертикального наведения размещен на неподвижной части станка.
3. Устройство по п. 1, отличающееся тем, что один червяк выполнен глобоидным.
4. Устройство по п. 1, отличающееся тем, что червячное колесо размещено в средней плоскости червяка, взаимодействующего с зубчатым колесом.
5. Устройство по п. 1, отличающееся тем, что червячная передача выполнена самотормозящейся.
6. Устройство по п. 1, отличающееся тем, что червяк намагничен.
7. Устройство по п. 1, отличающееся тем, что червяк, ось которого совмещена с вертикальной осью поворота подвижной части, выполнен пустотелым.
8. Устройство по п. 1, отличающееся тем, что часть червяка, ось которого совмещена с вертикальной осью поворота подвижной части, выполнена в виде электрического контакта, установленного с возможностью проворота относительно червяка.
9. Устройство по п. 1, отличающееся тем, что установка в зоне механизма вертикального наведения выполнена в виде масляной ванны.
10. Устройство по п. 1, отличающееся тем, что подвижная часть станка выполнена в виде патронной коробки.
11. Устройство по п. 1 или 8, отличающееся тем, что часть спускового механизма оружия выполнена в виде электромагнита, один конец обмотки которого соединен с «массой» подвижной части, а другой - с электрическим контактом.
12. Устройство по п. 1 или 8, отличающееся тем, что электрический контакт выполнен с односторонней проводимостью.
| КОМПЛЕКС АВТОМАТИЧЕСКОГО ОРУЖИЯ | 2008 |
|
RU2384809C1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| МЕХАНИЗМ ПОВОРОТА БАШНИ | 1992 |
|
RU2054154C1 |
| US 5570606, 05.11.1996. | |||

