Изобретение относится к устройствам для обработки и генерации данных и изображений и предназначено для разрешения ситуаций с проблемным объектом в медицине, образовании, маркетинге, технической диагностике, прототипировании, моделировании, проектировании, управлении, совместной работе и т.п.
Известны технические решения - аналоги по устройствам для визуализации сложных объектов (Система виртуальной реальности и телереальности. Патент РФ №2131621). В качестве прототипа взято устройство 3D-стереовизуализации (Визуализация информации. Каталог 2010-11 гг., - М.: Полимедиа, 2010 [http://www.polymedia.ru]).
Прототип содержит блоки: демонстрации 3D-изображения объекта, аудиосистем, управления информацией и компьютерной поддержки. Прототип предназначен для обработки информации и 3D-изображений объекта в задачах невысокой и средней сложности, но не обеспечивает системно-интегрированного визуального представления о ситуации с проблемным объектом и об управлении ее разрешением в задачах повышенной сложности, поскольку характеризуется структурно-функциональной неполнотой, связанной с недостаточностью средств интеграции полимедиапредставлений как об объекте, так и о связанной с ним проблемной ситуации. В результате прототип не дает требуемого качества разрешения ситуации с проблемным объектом в задачах повышенной сложности.
Техническая задача предлагаемого решения - улучшение качества разрешения ситуаций с проблемным объектом (РСПО), представленным его 3D-изображениями и информацией, в частности - мнениями экспертов, в задачах повышенной сложности за счет технического эффекта, связанного с системной интеграцией (С.Л. Гольдштейн, С.С. Печеркин. О механизме системной интеграции // Системы управления и информационные технологии, 2011, №3.1(45), с. 127-131) параметров и факторов ранжированной полиплоскостной визуализации как самой ситуации, так и управления ее разрешением.
В качестве характеристики качества взята точность (Т), как мера близости фактического и желаемого результатов.
Ее количественная оценка (ТРСПО) доступна по формулам:

где ТВО - точность визуализации объекта,
ТПЗ - точность постановки задачи по разрешению ситуации с объектом,
ТМРЗ - точность метода решения задачи,
ТВ - точность визуализации ситуации, действий, промежуточных и конечных результатов по решению задачи,
ТСИ - точность системной интеграции,
αi - веса, Σαi=1.
Поскольку ТВО, ТПЗ и ТМРЗ не относятся к предмету предлагаемого изобретения, т.е. одинаковы в прототипе и в предлагаемом решении, значимы лишь точность визуализации в части:

где ТВС - точность визуализации ситуации с объектом,
ТВСИ - точность визуализации системной интеграции,
ТУВ - точность управления визуализациями,
Σα4j=α4,
и точность системной интеграции в части:

где ТИИ - точность интеграции информации об объекте и ситуаций,
ТИИК - точность интеграции информационных каналов,
ТИМОС - точность интеграции моделей объекта и ситуаций,
ТИП - точность интеллектуальной подсказки,
Σα5j=α5,
Составляющие точности:

где ПППФ - полнота перечня параметров и факторов точности, подтвержденная экспертами,
КОПФ - количественная (инструментальная или экспертная) оценка значений параметров и факторов точности,
ТВОЦ - точность визуализации оценок,
k=1 - для ситуации,
k=2 - для системной интеграции,
k=3 - для управления визуализациями.
Для решения поставленной задачи устройство содержит блоки: демонстрации 3D-изображения проблемного объекта, аудиосистем, управления информацией и компьютерной поддержки, а также ранжированной полиплоскостной визуализации ситуаций, управления ранжированными полиплоскостными визуализациями и системной интеграции.
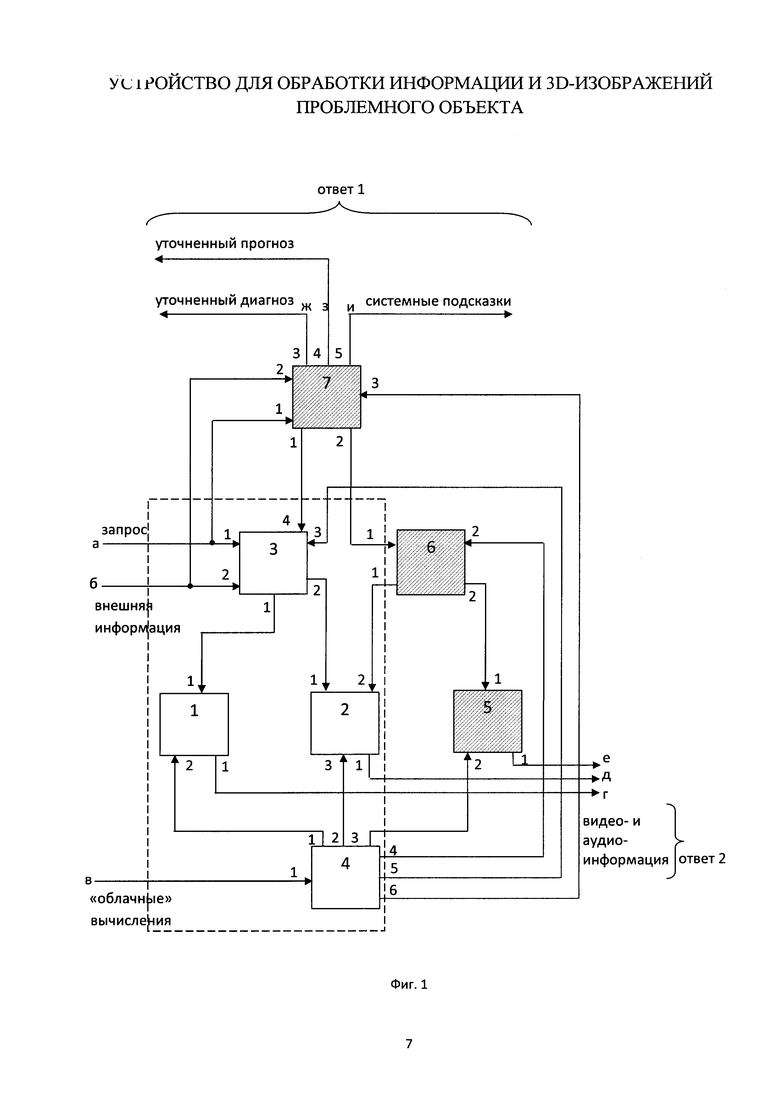
Блоки соединены так, что блок управления информацией связан по первому и второму входам с первым и вторым входами блока системной интеграции и одновременно с внешней средой (блоки коммуникации, например, гаджеты, лиц, заинтересованных в разрешении ситуаций с проблемным объектом) по каналам «запрос» и «внешняя информация», по третьему входу связан с пятым выходом блока компьютерной поддержки, по четвертому входу - с первым выходом блока системной интеграции, по выходу 1 - с первым входом блока демонстрации 3D-изображения, по выходу 2 - с первым входом блока аудиосистем, который вторым входом соединен с первым выходом блока управления ранжированной полиплоскостной визуализацией и третьим входом - со вторым выходом блоком компьютерной поддержки, а первым выходом - с внешней средой по каналу «аудиоинформация»; блок демонстрации 3D-изображения соединен по второму входу с первым выходом блока компьютерной поддержки, а первым выходом - с внешней средой по каналу «видеоинформация», блок компьютерной поддержки по входу 1 соединен с внешней средой (канал «облачные вычисления»), по выходу 3 - со вторым входом блока ранжированной полиплоскостной визуализации, по выходу 4 - со вторым входом блока управления ранжированной полиплоскостной визуализацией, по выходу 6 - с третьим входом блока системной интеграции, третий, четвертый и пятый выходы которого связаны с внешней средой по каналам «уточненный диагноз ситуации», «уточненный прогноз ситуации», «системная подсказка», второй выход подан на первый вход блока управления ранжированной полиплоскостной визуализацией, второй выход которого связан с первым входом блока ранжированной полиплоскостной визуализации, выход которого соединен с внешним каналом «е» (видеоинформация).
При этом вновь введенный блок ранжированной полиплоскостной визуализации включает модули визуализации: тезаурусной онтологии с контентом, когнитивных карт, служебных пространств объекта и ментальных пространств субъектов, критериев и оценок, алгоритмов действий. Вновь введенный блок управления ранжированной полиплоскостной визуализацией ситуации включает модули: фиксации состояний, критериев качества управления, реализации управления, парирования помех управления и оценок результатов управления. А вновь введенный блок системной интеграции включает модули: отражения видео-аудиоситуаций, информационной логистики, системно-научной поддержки, человекомашинной интеллектуальной поддержки/подсказки.
Сущность предложенного решения заключается в том, что субъекту как лицу, ответственному за разрешение ситуаций (ЛРС) с проблемным объектом, обеспечивается системно-интеграционная подсказка в части анализа, диагностирования и управления за счет введения в структуру устройства трех дополнительных блоков: ранжированной полиплоскостной визуализации ситуаций, управления ею и системной интеграции.
На фиг. 1 представлена схема устройства, которое включает блок 1 демонстрации 3D-изображения проблемного объекта, блок 2 аудиоподдержки, блок 3 управления информацией, блок 4 компьютерной поддержки, а также блок 5 ранжированной полиплоскостной визуализации ситуаций, блок 6 управления ранжированной полиплоскостной визуализацией и блок 7 системной интеграции, выделенные штриховкой.
Устройство используют следующим образом. На вход «б» поступает внешняя информация, во-первых, от сканера (например, томографа) в виде совокупности 2D-данных (срезов, сканов) о проблемном объекте (например, человеческом органе с патологией), во-вторых, - от специалистов/экспертов, а на вход «а» - задача как запрос от субъекта-заказчика (например, врача, медицинского менеджера или больного и его семьи) на анализ, диагностику, прогноз и действия по разрешению ситуации (например, анализ истории болезни, медицинский диагноз, прогноз исхода и действия врача по лечению и реабилитации). С помощью блока 3 субъект управляет информацией, необходимой для генерирования 3D-визуализации объекта в виде голограммы, CAVE-изображения и т.п. (блок 1), и модерацией аудиомнений специалистов/экспертов (блок 2) по поводу 3D-визуализации. Работа блоков 1-3 поддержана компьютерной мощностью блока 4, обеспечивающего обработку информации (до текстов, таблиц, диаграмм, рисунков, графиков, видео) и имеющего выход в ресурс «облачных» вычислений (вход «в»). С помощью блоков 5 и 6 ЛРС формирует от 4-х до 6-ти видеоплоскостей, ранжированных, т.е. ситуативно упорядоченных по значимости и отражающих ситуацию с проблемным объектом и ход ее разрешения. В задачах повышенной сложности субъект использует блок 7, интегрируя все ресурсы, необходимые для разделения ситуаций на предметные и системные и последующего генерирования системно-интеллектуальных подсказок (выход «и»). В результате во внешнюю среду, т.е. заказчику или ЛРСу, выводится не только видео-аудиоинформация о проблемном объекте (выходы «е», «д», «г»), но и уточненные диагноз и прогноз вместе с системной подсказкой (выходы «ж», «з», «и» соответственно).
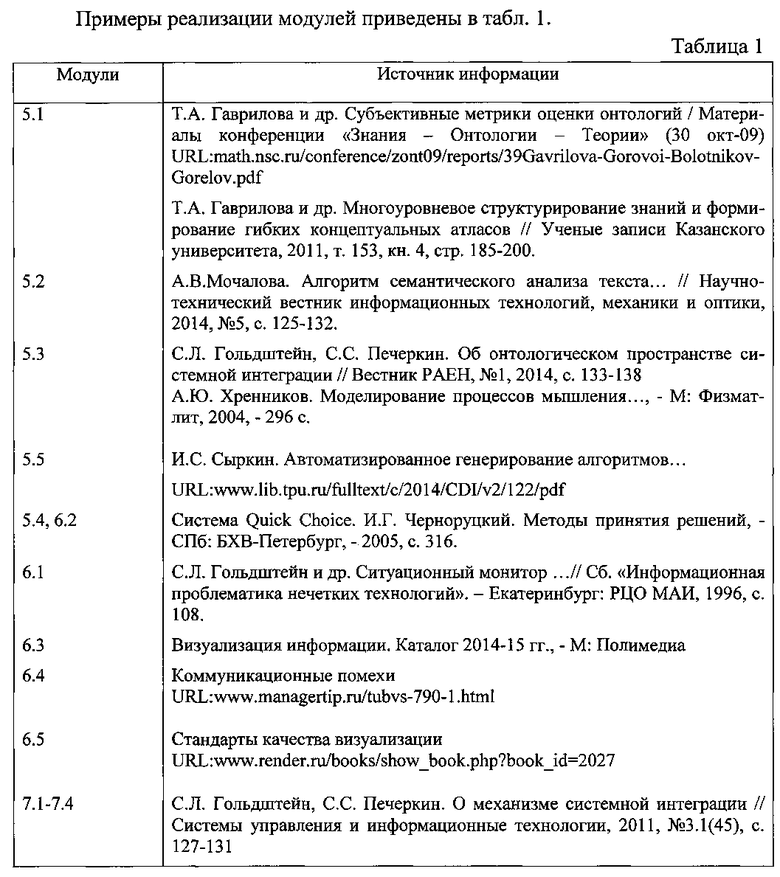
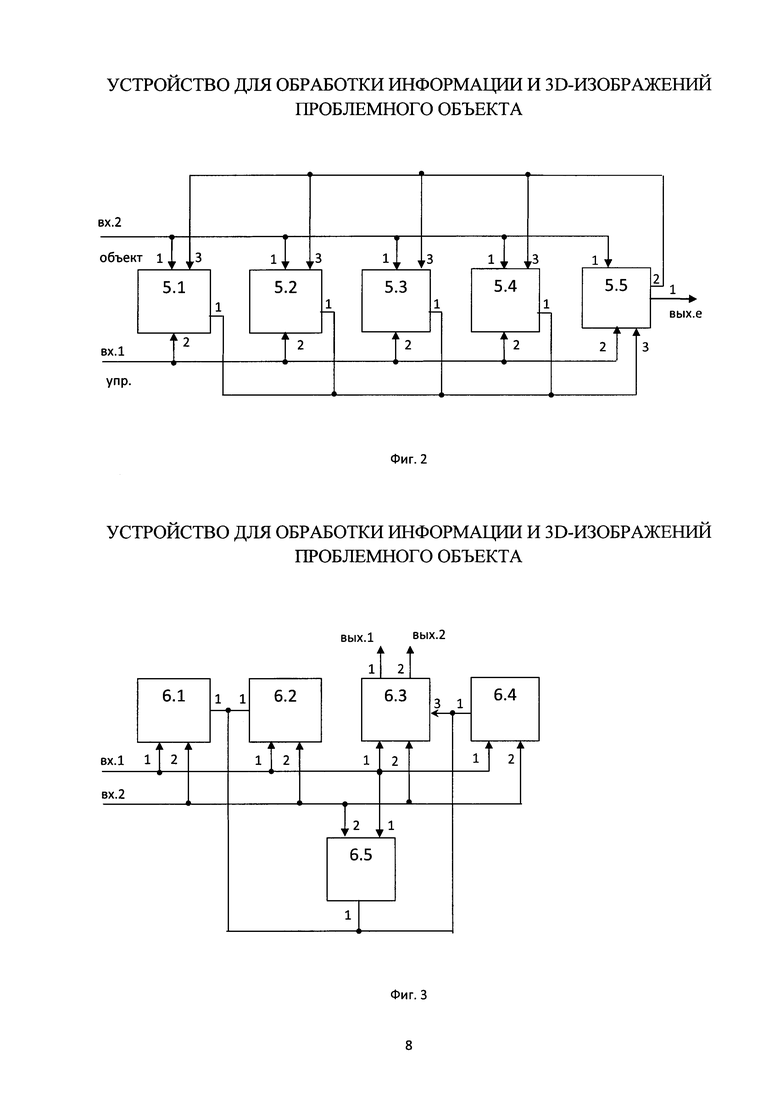
На фиг. 2 представлена схема блока 5 - ранжированной полиплоскостной визуализации ситуации. С его помощью формируют 2D- и 3D-изображения различных аспектов работы ЛРС по анализу и разрешению ситуаций: упорядочение основных понятий по ситуации на 4-6-ранжированных видеоплоскостях (модуль 5.1); вычленение понятий, соответствующих запросу заказчика (модуль 5.2); построение служебного пространства состояний объекта и ментальных пространств субъектов (модуль 5.3); формирование критериев и оценок разрешения ситуаций (модуль 5.4); генерирование алгоритмов (например, на языке блок-схем по ГОСТ 19.701) разрешения ситуаций (модуль 5.5). Работа всех модулей блока 5 обеспечена связями: внешний вход 1 связан с входами 2 модулей 5.1-5.5, а внешний вход 2 - с входами 1 этих модулей; 1-е выходы модулей 5.1-5.4 поданы на 3-й вход модуля 5.5; а его 1-й выход - на внешний выход «е», а выход 2 модуля 5.5 связан с входами 3 модулей 5.1-5.4.
На фиг. 3 представлена схема блока 6 - управления ранжированной полиплоскостной визуализацией. С его помощью ЛРС управляет ранжированной полиплоскостной визуализацией ситуаций, задавая фактическое и желаемое состояние ситуаций (модуль 6.1), выбирая критерии точности управления (модуль 6.2), реализуя управление путем расходования информационных ресурсов (модуль 6.3), парируя помехи (модуль 6.4) и оценивая результаты управления (модуль 6.5). Работа всех модулей блока 6 реализуется за счет связей: внешний вход 1 приходит на первые входы модулей 6.1÷6.5, а внешний вход 2 - на их вторые входы; первые выходы модулей 6.1, 6.2, 6.4 и 6.5 поступают на третий вход модуля 6.3, выходы которого являются внешними выходами блока 6.
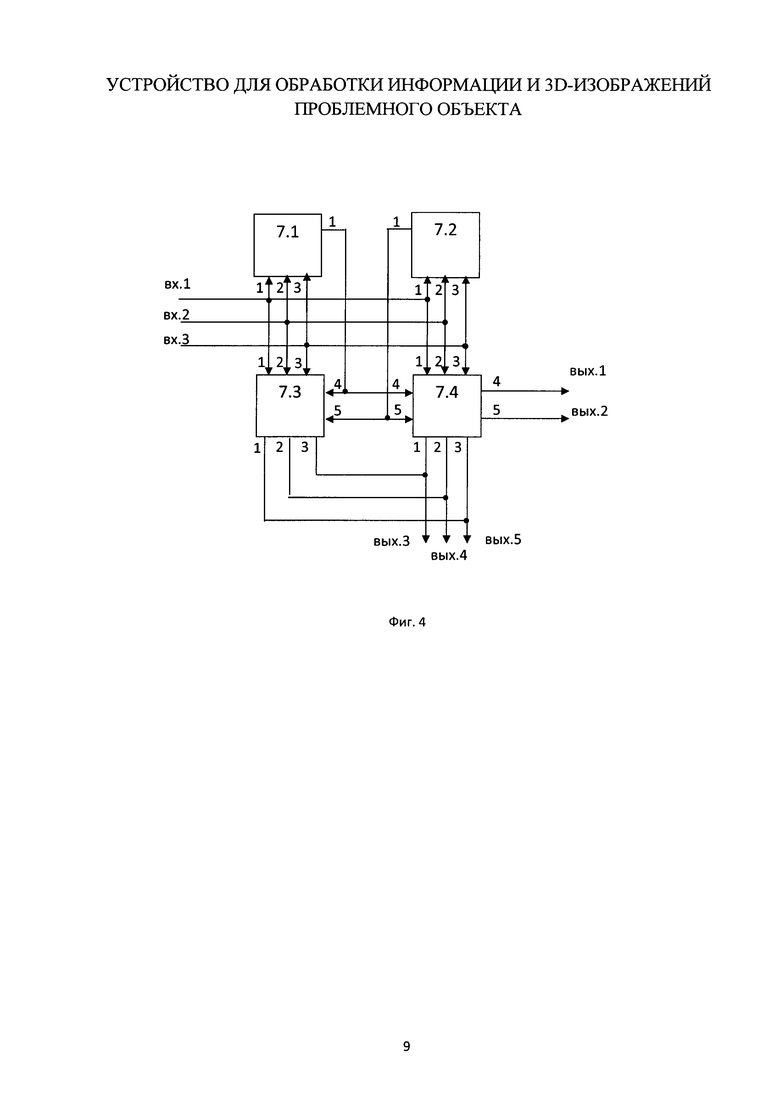
На фиг. 4 представлена схема блока 7 - системной интеграции. С его помощью ЛРС интегрирует всю видео- и аудиоинформацию о проблемном объекте и о ситуации (модуль 7.1), обеспечивает информационную логистику по внутренним и внешним каналам (модуль 7.2), дает системную поддержку для задач повышенной сложности (модуль 7.3) и когнитивную поддержку от системы, основанной на знаниях (модуль 7.4). Работа всех модулей блока 7 реализуется за счет связей: внешние входы 1, 2, 3 связаны с соответствующими входами модулей 7.1÷7.4; первый, второй, третий выходы модулей 7.3 и 7.4 соединены с внешними выходами 3, 4 и 5; четвертый и пятый выходы модуля 7.4 связаны с внешними выходами 1 и 2, а первые выходы модулей 7.1 и 7.2 служат четвертым и пятым входами модулей 7.3 и 7.4.
В результате взаимодействия субъектов (заказчика, экспертов и ЛРС) с блоками 1÷4 реализуется разрешение ситуаций в задачах малой и средней сложности, а для задач повышенной сложности используются дополнительные блоки 5-7, обеспечивающие интеграцию объемной визуализации проблемного объекта и аудио-мнения специалистов/экспертов с ранжированной полиплоскостной визуализацией ситуаций и когнитивными подсказками по предметным и системным аспектам.
Пример приложения предлагаемого технического устройства связан с медицинской задачей повышенной сложности, а именно: количественной оценки диссеминированного поражения легких (ДПЛ) больных туберкулезом (таблица 2). Достигнутый результат - точная (количественная) оценка диссеминации вместо качественной, доступной в настоящее время средствами прототипа.
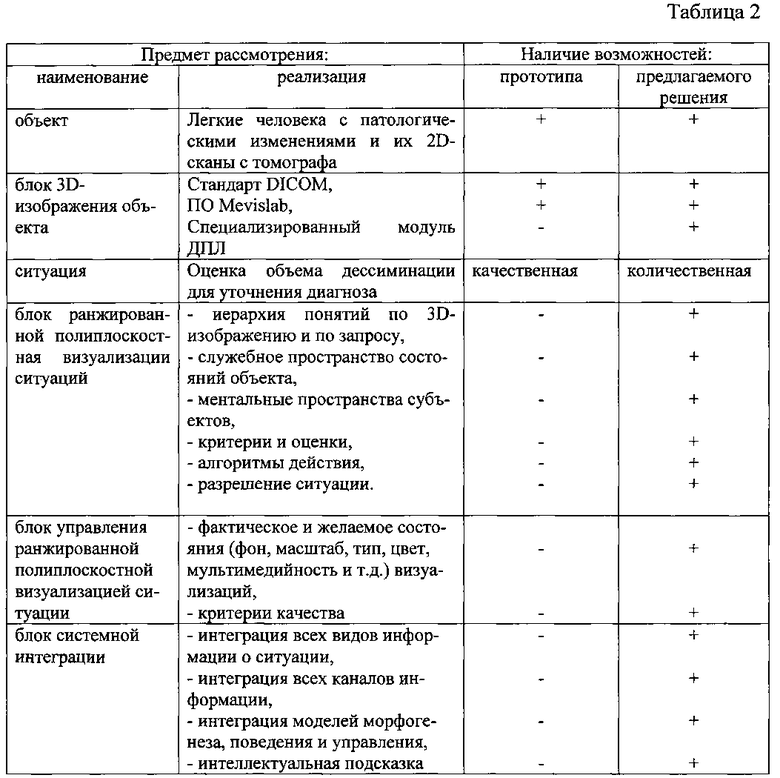
Возможности прототипа и предлагаемого решения с учетом ТРСПО сравнимы и количественно:

где ТФУ - точность функционирования устройства,
ТФБm - точность функционирования m-го блока устройства по прототипу,
 - точность функционирования вновь введенного m-го блока,
- точность функционирования вновь введенного m-го блока,
γm - веса, γΣm=1.
С учетом табл. 2 сравнение оценок точности функционирования устройства по прототипу и предлагаемому решению для приведенной задачи повышенной сложности представлено в табл. 3.
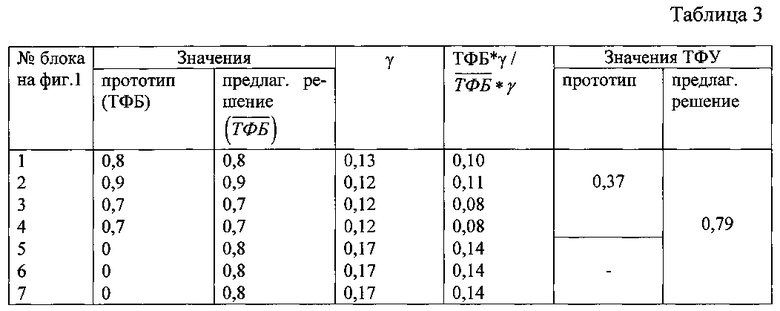
Видно, что для примера из табл. 3 техническая задача решена с помощью предлагаемого устройства в 2 раза лучше, чем с прототипом.
Таким образом, при реализации предлагаемого решения расширяются функциональные возможности устройства обработки информации и 3D-изображения проблемного объекта, повышается качество работы субъекта как лица, отвечающего за разрешение ситуаций, и, в конечном итоге, существенно улучшается точность разрешения ситуаций с проблемным объектом при повышенной сложности задач.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ЗНАНИЯМИ ДЛЯ РАЗРЕШЕНИЯ СИТУАЦИЙ | 2011 |
|
RU2480826C2 |
| ЯДЕРНО-МЕДИЦИНСКАЯ УСТАНОВКА | 2010 |
|
RU2464658C2 |
| АВТОМАТИЗИРОВАННЫЙ ГЕНЕРАТОР ТЕХНИЧЕСКОГО ЗАДАНИЯ ДЛЯ ВРАЧА-ПРОЕКТИРОВЩИКА | 2011 |
|
RU2465646C1 |
| Способ поиска методов разрешения технических противоречий и система на основе обучаемой нейронной сети для его осуществления | 2019 |
|
RU2707917C1 |
| СИСТЕМА МОНИТОРИНГА СОСТОЯНИЯ ОБОРУДОВАНИЯ | 2020 |
|
RU2753736C1 |
| Автоматизированная система распределенной когнитивной поддержки принятия диагностических решений в медицине | 2015 |
|
RU2609737C1 |
| Интерактивная автоматизированная система для проведения научных исследований, проектирования и обучения персонала эксплуатации электротехнических комплексов в нефтяной отрасли | 2018 |
|
RU2672163C1 |
| Автоматизированная логистическая информационно-интеллектуальная система принятия решений в производственно-логистическом комплексе | 2020 |
|
RU2755520C1 |
| СПОСОБ ПРОЕКТИРОВАНИЯ МНОГОРЕЖИМНОЙ ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМЫ УПРАВЛЕНИЯ РАСПРЕДЕЛЕННОЙ СРЕДОЙ МЯГКИХ ВЫЧИСЛЕНИЙ | 2014 |
|
RU2596992C2 |
| СПОСОБ И УСТРОЙСТВО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ МОСТА | 2015 |
|
RU2598803C1 |
Изобретение относится к устройствам для обработки и генерации данных. Техническим результатом является повышение точности обработки информации и 3D-изображения проблемного объекта. Устройство содержит блоки демонстрации 3D-изображения проблемного объекта, блок аудиоподдержки, блок управления информацией, блок компьютерной поддержки, блок ранжированной полиплоскостной визуализации ситуаций, блок управления ранжированной полиплоскостной визуализацией, блок системной интеграции. 4 ил., 3 табл.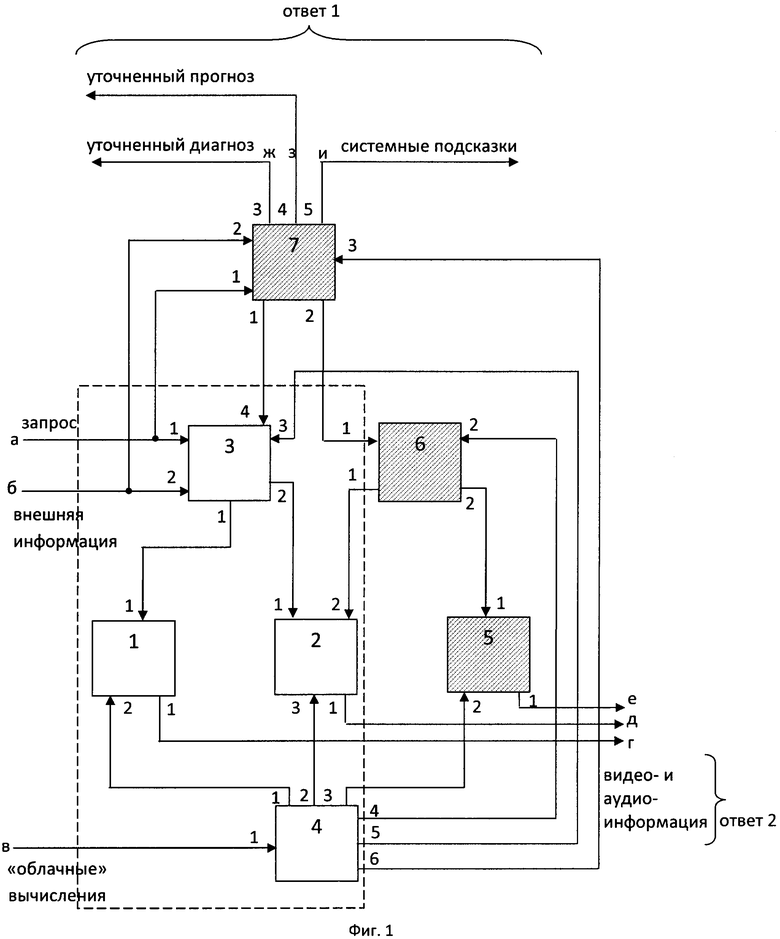
Устройство для обработки информации и 3D-изображений проблемного объекта, содержащее блоки демонстрации 3D-изображений объекта, аудиосистем, управления информацией и компьютерной поддержки, при этом блок компьютерной поддержки связан со всеми блоками и с внешними блоками-коммуникаторами субъектов как лиц, заинтересованных в разрешении ситуаций с проблемным объектом, по входу, блок управления информацией связан по первому и второму входам с внешней средой, а по первому и второму выходам - с блоком создания 3D-изображения и блоком аудиосистем соответственно, первые выходы которых связаны с блоками-коммуникаторами, отличающееся тем, что дополнительно введены блок ранжированной полиплоскостной визуализацией ситуаций и блок управления ею, а также блок системной интеграции, при этом блок ранжированной полиплоскостной визуализации ситуаций включает модули упорядочения основных понятий по проблеме вычленения понятий, соответствующих запросу заказчика, построения служебного пространства состояний объекта и ментальных пространств субъектов на четырех-шести видеоплоскостях, формирования критериев и оценок разрешения ситуаций, генерирования алгоритмов разрешения ситуаций, блок управления ранжированной полиплоскостной визуализацией включает модули фиксации фактического и желаемого состояния ситуаций, критериев качества управления, реализации управления, парирования помех и оценки результатов управления, а блок системной интеграции включает модули интеграции видео- и аудиоинформации о проблемном объекте и о ситуации с ним, информационной логистики, системной и когнитивной поддержек, причем первый и второй входы блока системной интеграции и его третий, четвертый и пятый выходы связаны с блоками-коммуникаторами субъектов, а первый и второй выходы - с четвертым и первым входами блока управления информацией и блока управления ранжированной полиплоскостной визуализацией соответственно, при этом первый и второй выходы последнего поступают на второй вход блока аудиосистем и на первый вход блока ранжированной полиплоскостной визуализации ситуаций, выход которого связан с блоками-коммуникаторами субъектов.
| СИСТЕМА ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ И ТЕЛЕРЕАЛЬНОСТИ | 1995 |
|
RU2131621C1 |
| RU2012156375 A, 27.06.2014 | |||
| EA200600645 A1, 27.10.2006 | |||
| US6381296 B1, 30.04.2002. | |||

