Изобретение относится к геофизическому приборостроению, а именно к сейсмометрии, и может быть использовано в сейсмической разведке месторождений полезных ископаемых, в сейсмических группах для регистрации землетрясений, подземных ядерных и химических взрывов, а также в сейсмических системах охраны.
Известен сейсмограф, содержащий герметичный корпус, инерционную массу с системой подвеса, подвешенную к корпусу, магнитную демпфирующую систему, прикрепленную к инерционной массе, зеркальную отражающую поверхность, установленную на инерционной массе, лазерный микрометр, соединенный с выходным устройством и укрепленный на корпусе так, что его продольная ось направлена на отражающую поверхность перпендикулярно ей, а выходное устройство и блок времени соединены с постоянным запоминающим устройством (ПЗУ). [1]
Недостатками аналога являются: невысокая точность регистрации сейсмических колебаний в результате невозможности динамического контроля изменения нулевого положения инерционной массы (дрейф нуля) в результате внешних воздействий (изменение температуры, влажности, давления) и конструктивных изменений, заключающихся в старении элементов конструкции; низкая оперативность получения и обработки сейсмических данных.
Наиболее близким к предлагаемому изобретению является сейсмограф, содержащий герметичный корпус, инерционную массу с системой подвеса, подвешенную к корпусу, магнитную демпфирующую систему, прикрепленную к инерционной массе, зеркальную отражающую поверхность, установленную на инерционной массе, лазерный микрометр, соединенный с выходным устройством и укрепленный на корпусе так, что его продольная ось направлена на отражающую поверхность перпендикулярно ей, а выходное устройство и блок времени соединены с постоянным запоминающим устройством, блок контроля нулевого положения инерционной массы сейсмографа, причем выход лазерного микрометра соединен с его входом и одним из входов выходного устройства, выход блока контроля нулевого положения соединен с другим входом выходного устройства, а выходное устройство и блок времени соединены с постоянным запоминающим устройством. [2]
Недостатком прототипа также является низкая точность регистрации сейсмических колебаний в результате достаточно большой методической ошибки в определении дальности до нулевого положения инерционной массы в блоке контроля нулевого положения инерционной массы и низкая оперативность получения и обработки сейсмических данных.
Целью изобретения является повышение точности регистрации сейсмических колебаний и повышение оперативности получения и обработки сейсмических данных.
Поставленная цель достигается тем, что известный сейсмограф, содержащий герметичный корпус, инерционную массу с системой подвеса, подвешенную к герметичному корпусу, магнитную демпфирующую систему, прикрепленную к инерционной массе, зеркальную отражающую поверхность, установленную на инерционной массе, лазерный микрометр, укрепленный на корпусе так, что его продольная ось направлена на отражающую поверхность перпендикулярно ей, блок времени и постоянное запоминающее устройство, дополнительно содержащее блок формирования выходного сигнала, включающий блок конечной обработки сигнала, блок определения положения инерционной массы, содержащий последовательно соединенные ПЗУ, блок временной синхронизации сигналов и блок вычисления дальности; выход лазерного микрометра подключен к входу блока временной синхронизации и входу блока конечной обработки сигнала, к другим информационным входам которого подключен блок времени и блок определения дальности, выходы устройства управления соединены с управляющим входом блока определения положения инерционной массы и управляющим входом генератора эталонного сигнала, выходы которого соединены с входами калибровочной катушки, а выход блока конечной обработки сигнала подключен ко входу блока интерфейса с клиентской частью.
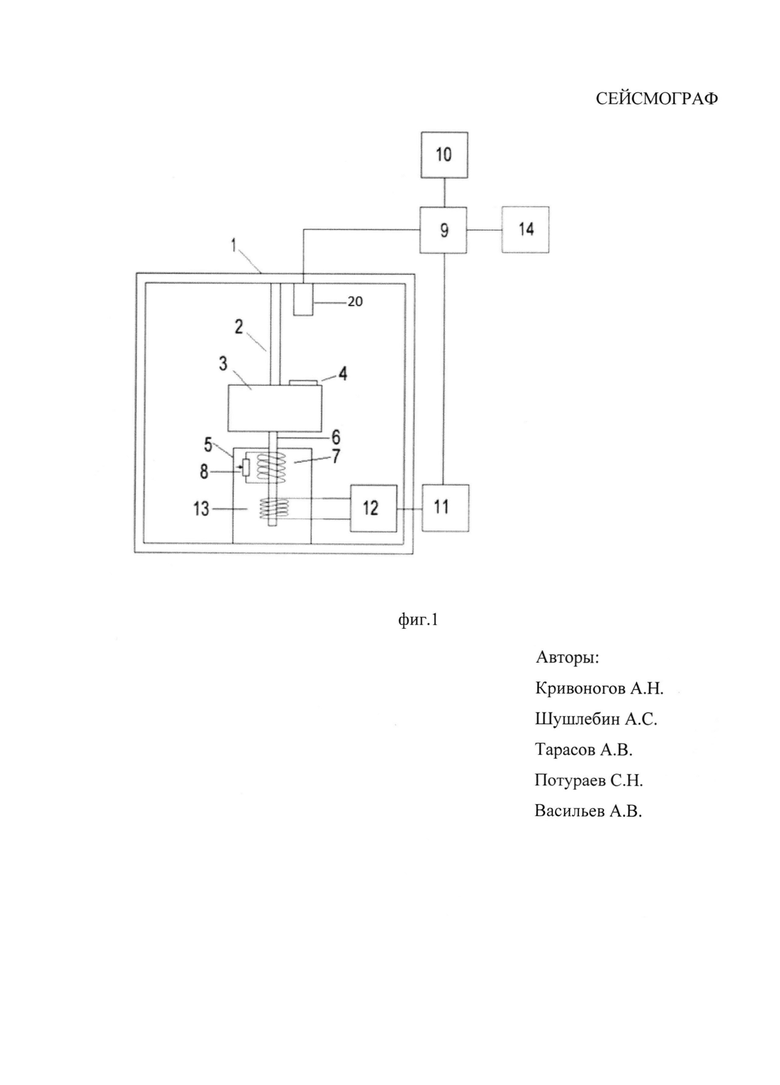
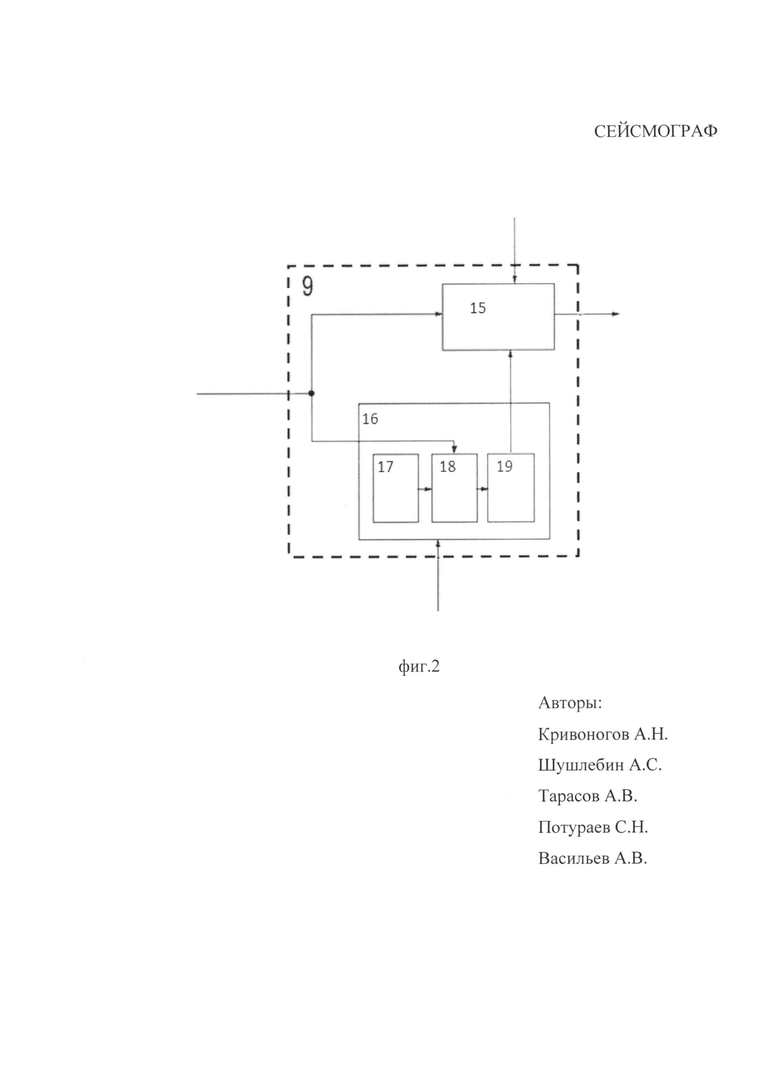
На фиг.1 представлена структурная схема вертикального сейсмографа. На фиг.2 представлена структурная схема блока формирования выходного сигнала, где:
1. герметичный корпус
2. система подвеса
3. инерционная масса
4. зеркальная отражающая поверхность
5. магнитная демпфирующая система
6. ферритовый стержень
7. демпфирующая катушка
8. управляемый резистор
9. блок формирования выходного сигнала
10. блок времени
11. устройство управления
12. генератор эталонного сигнала
13. калибровочная катушка
14. блок интерфейса с клиентской частью
15. блок конечной обработки сигнала
16. блок определения положения инерционной массы
17. постоянное запоминающее устройство
18. блок временной синхронизации сигналов
19. блок вычисления дальности
20. лазерный микрометр.
Сейсмограф состоит из: герметичного корпуса 1; системы подвеса 2 инерционной массы 3, на которой жестко установлена зеркальная отражающая поверхность 4; магнитной демпфирующей системы 5, содержащей ферритовый стержень 6, который прикреплен к инерционной массе 3, и демпфирующую катушку 7, замкнутую на управляемый резистор 8 и прикрепленную к герметичному корпусу 1; лазерного микрометра 20, закрепленного на герметичном корпусе 1 так, что его продольная ось направлена на зеркальную отражающую поверхность 4 перпендикулярно ей; блока формирования выходного сигнала 9.
Блок формирования выходного сигнала 9 включает блок конечной обработки сигнала 15 и блок определения положения инерционной массы 16, содержащий последовательно соединенные ПЗУ 17, блок временной синхронизации сигналов 18 и блок вычисления дальности 19, выход лазерного микрометра 20 подключен к входу блока временной синхронизации сигналов 18 и входу блока конечной обработки сигнала 15; к другим информационным входам блока конечной обработки сигнала 15 подключен блок времени 10 и блок определения дальности 19. Выходы устройства управления 11 соединены с управляющим входом блока определения положения инерционной массы 16 и управляющим входом генератора эталонного сигнала 12, выходы которого подключены к калибровочной катушке 13, прикрепленной к герметичному корпусу 1 и расположенной вокруг ферритового стержня 6 магнитной демпфирующей системы 5. Выход блока конечной обработки сигнала 15 подключен к входу блока интерфейса с клиентской частью 14.
Устройство функционирует следующим образом: энергия сейсмических колебаний приводит в движение герметичный корпус 1 сейсмографа относительно инерционной массы 3; лазерный микрометр 20 с заданной частотой дискретизации Δt излучает лазерный луч, который отражается от зеркальной поверхности 4 и возвращается обратно. Лазерный микрометр 20 по результатам отражения луча определяет дальность до текущего положения инерционной массы по формуле Y(i)=n(i)+D, где n(i) - колебания инерционной массы 3 относительно герметичного корпуса 1, D - дальность от лазерного микрометра 20 до нулевого положения инерционной массы 3. Выходной сигнал лазерного микрометра 20 поступает в блок определения положения инерционной массы 16 и блок конечной обработки сигнала 15, в котором из выходного сигнала лазерного микрометра 20 Y(i) вычитается выходной сигнал блока вычисления дальности 19 D - вычисленная дальность от лазерного микрометра 20 до нулевого положения инерционной массы 3, и производится привязка отчетов сигналов к меткам времени T, поступающим из блока времени 10. Выходной сигнал блока конечной обработки сигнала 15 поступает на вход блока интерфейса с клиентской частью 14, в котором он передается на клиентские средства регистрации, передачи, экспресс-анализа и других видов оконечной обработки.
Для вычисления D устройство управления 11 формирует управляющий сигнал, поступающий в генератор эталонного сигнала 12, который подает на калибровочную катушку 13 ток I(t)=B·sin(ω·t), при этом ферритовый стержень 6, жестко укрепленный на инерционной массе 3, приводится в колебательное движение y(t)=A·sin(ω·t). Другой выход устройства управления 11, подключенный к управляющему входу блока определения положения инерционной массы 16, запускает процесс вычисления D.
В блоке временной синхронизации сигналов 18 производится накопление отчетов дальностей до текущего положения инерционной массы 3 - Y(i)=A·sin(ω·i+φ)+n(i)+D, 

В ПЗУ 17 сохранен эталонный сигнал S(j)=A·sin(ω·j), 
В блоке временной синхронизации сигналов 18 производится временная синхронизация сохраненного в нем сигнала дальностей и эталонного сигнала. Для этого вычисляются значения взаимно-корреляционной функции сигналов 
и подаются в блок вычисления дальности 19 D - между лазерным микрометром 20 и зеркальной отражающей поверхностью 4.
Блок вычисления дальности 19 производит определение отношения сигнал-шум (ОСШ) в dB между сигналом дальностей Y(j) и эталонным сигналом S(j), сдвигаемым с установленным шагом d переменной d∈[min(D(s+j)), max(D(s+j))], 

Выходной сигнал Y(T) блока конечной обработки сигнала 15 при  равен колебанию инерционной массы 3 относительно герметичного корпуса 1 Y(T)=n(T).
равен колебанию инерционной массы 3 относительно герметичного корпуса 1 Y(T)=n(T).
Полезными техническими эффектами использования устройства является повышение точности регистрации колебаний инерционной массы 3, за счет совершенствования методики определения нулевого положения инерционной массы 3, реализуемой в блоке определения положения инерционной массы 16, а также повышение оперативности обработки сейсмического сигнала за счет использования блока интерфейса с клиентской частью 14, после которого сейсмический сигнал передается на клиентские средства регистрации, передачи, экспресс-анализа и других видов оконечной обработки.
Используемая литература
1. Патент РФ на полезную модель 101848, Сейсмограф, МПК G01V 1/00, 2010 г., авторы: Кривоногов А.Н. и др. (аналог).
2. Патент РФ на полезную модель 107866, Сейсмограф, МПК G01V 1/00, 2011 г., авторы: Кривоногов А.Н. и др. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Сейсмограф | 2020 |
|
RU2727550C1 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2014 |
|
RU2554283C1 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2447466C2 |
| Скважинный электродинамический сейсмограф | 1980 |
|
SU894642A1 |
| Способ калибровки сейсмографов | 2016 |
|
RU2632986C2 |
| ЗЕРКАЛЬНЫЙ СЕЙСМОГРАФ | 2021 |
|
RU2786340C1 |
| СЕЙСМОГРАФ С ЛАЗЕРНОЙ РЕГИСТРАЦИЕЙ | 2021 |
|
RU2786338C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2449325C1 |
| ПОДВОДНАЯ СТАНЦИЯ | 2014 |
|
RU2563316C1 |
Изобретение относится к устройствам для регистрации сейсмических волн. Сущность: устройство содержит герметичный корпус (1), внутри которого расположены следующие элементы: инерционная масса (3) с системой подвеса (2), зеркальная отражающая поверхность (4), магнитная демпфирующая система (5), генератор (12) эталонного сигнала, калибровочная катушка (13), лазерный микрометр (20). Кроме того, устройство содержит блок (9) формирования выходного сигнала, блок (10) времени, устройство (11) управления, блок (14) интерфейса с клиентской частью. Причем блок (9) формирования выходного сигнала содержит блок конечной обработки сигнала и блок определения положения инерционной массы, включающий в себя постоянное запоминающее устройство, блок временной синхронизации сигналов и блок вычисления дальности. Технический результат: повышение точности регистрации сейсмических колебаний, повышение оперативности получения и обработки сейсмических данных. 2 ил.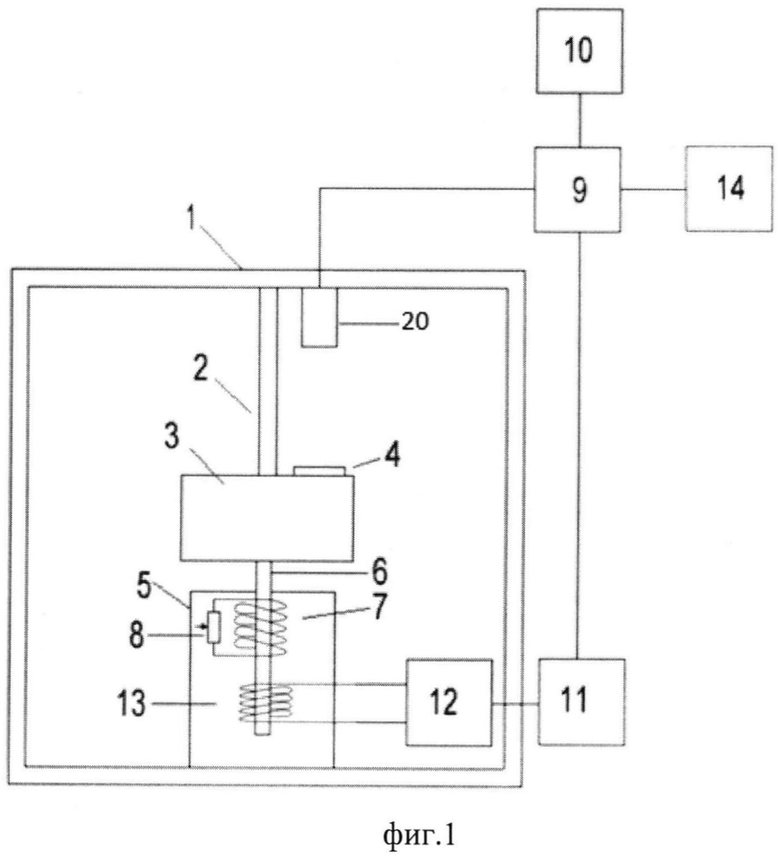
Сейсмограф, содержащий герметичный корпус, инерционную массу с системой подвеса, подвешенную к герметичному корпусу, магнитную демпфирующую систему, прикрепленную к инерционной массе, зеркальную отражающую поверхность, установленную на инерционной массе, лазерный микрометр, укрепленный на корпусе так, что его продольная ось направлена на отражающую поверхность перпендикулярно ей, блок времени и постоянное запоминающее устройство, отличающийся тем, что дополнительно введен блок формирования выходного сигнала, содержащий блок конечной обработки сигнала и блок определения положения инерционной массы, включающий в себя последовательно соединенные постоянное запоминающее устройство, блок временной синхронизации сигналов и блок вычисления дальности, соединенный с блоком конечной обработки сигнала, причем выход лазерного микрометра подключен к входу блока временной синхронизации и входу блока конечной обработки сигнала, к которому подключен блок времени и блок определения дальности, выходы устройства управления соединены с управляющим входом блока определения положения инерционной массы и управляющим входом генератора эталонного сигнала, выходы которого соединены с входами калибровочной катушки, а вход блока интерфейса с клиентской частью подключен к выходу блока конечной обработки сигнала.
| Прибор для отбора проб атмосферного воздуха для бактериологического исследования | 1956 |
|
SU107866A1 |
| Способ размножения текстовых и графических материалов на диазо и цианотипных бумагах | 1954 |
|
SU101848A1 |
| ОПТОВОЛОКОННОЕ УСТРОЙСТВО РЕГИСТРАЦИИ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2007 |
|
RU2349934C1 |

