Изобретение относится к области измерительной техники, а именно к сейсморегистраторам, срабатывающим при воздействии механических линейных колебаний (в том числе колебаний земной коры), и может быть использовано для решения задач сейсморазведки, промышленного контроля, контроля и охраны периметра территорий различных объектов от несанкционированного доступа, включая пограничные территории.
Известно сейсмоизмерительное устройство [Патент РФ №2066467], содержащее источник когерентного излучения (полупроводниковый лазер), несколько сейсмодатчиков, систему обработки сигналов, связанных оптическим кабелем, при этом каждый датчик представляет собой одноволоконный интерферометр. Сигнал на выходе сейсмоизмерительного устройства пропорционален сумме сигналов от каждого датчика. Основным недостатком этого устройства является невозможность четкой регистрации (локализации) сигнала от отдельного датчика при низких уровнях механических колебаний, и как следствие, невозможность осуществить идентификацию конкретного датчика, в зоне расположения которого возникли механические колебания, что не позволяет использовать это сейсмоизмерительное устройство для организации контроля значительного числа датчиков на протяженных участках территории. Кроме того, это сейсмоизмерительное устройство предполагает наличие замкнутой кольцевой волоконной системы с последовательно распределенными на ней источником излучения, датчиками и блоком обработки, что не позволяет организовать систему контроля периметра (границ) территории произвольной формы, по незамкнутому типу.
Наиболее близким по технической сущности, принятым за прототип, является оптоволоконное устройство измерения линейных перемещений [Патент РФ №2168743], содержащее датчик, включающий герметичный корпус, инерционную массу с системой подвеса, магнитную демпфирующую систему, зеркальную отражающую поверхность и узел крепления волоконного кабеля, а также волоконный кабель, соединяющий датчик с базовой станцией, и базовую станцию, включающую модуль формирования, обработки и регистрации сигналов.
Основным недостатком прототипа является использование многожильного волоконного кабеля из трех оптических волокон для соединения датчика с базовой станцией, невозможность подсоединения к волоконному кабелю других датчиков, и как результат, при организации системы контроля периметра (границ) территории необходимость соединения каждого датчика с базовой станцией отдельным волоконным кабелем, что требует больших трудовых и материальных затрат на формирование измерительной сети большой протяженности.
Невозможность последовательного подключения к волоконному кабелю нескольких датчиков обусловлена использованием разных волокон для передачи оптического сигнала от базовой станции к датчику и для приема отраженного сигнала от датчика к базовой станции и особенностями устройства датчика. Датчик выполнен в виде корпуса, содержащего инерционную массу, закрепленную на двух ирисовых пружинах, постоянный магнит и узел крепления волоконного кабеля. На торцевой поверхности инерционной массы, перпендикулярной оси ее перемещения, расположены зеркала. Волоконный кабель, связывающий датчик с базовой станцией, включает три волокна. Модуль формирования, обработки и регистрации сигнала базовой станции содержит источники оптического излучения, приемники оптического излучения (фотодетекторы), оптическую систему соединения и разветвления каналов, аналого-цифровой преобразователь, микропроцессор, мультиплексор, регистратор. Устройство датчика предполагает использование разных волокон для подведения оптического излучения и передачи отраженного сигнала. Кроме того, демпфирование колебаний инерционной массы осуществляется за счет жесткости ирисовых пружин и электромагнитного торможения. Для действия последнего использованы короткозамкнутые витки, расположенные на внешней стороне инерционной массы.
Предлагаемое оптоволоконное устройство регистрации линейных перемещений решает задачу повышения технических характеристик: упрощение конструкции, возможность размещения на одном волоконном кабеле нескольких датчиков, в том числе на значительных удалениях от базовой станции, возможность организации системы контроля и охраны периметра (границ) территории или сейсморазведки при минимальной длине волоконного кабеля и произвольном размещении датчиков в пространстве, а также позволяет снизить трудовые и материальные затраты на формирование измерительной или охранной сети большой протяженности.
Предложено оптоволоконное устройство регистрации линейных перемещений, содержащее датчик, включающий герметичный корпус, инерционную массу с системой подвеса, магнитную демпфирующую систему, зеркальную отражающую поверхность и узел крепления волоконного кабеля, а также волоконный кабель, соединяющий датчик с базовой станцией, и базовую станцию, включающую модуль формирования, обработки и регистрации сигналов. Система подвеса инерционной массы выполнена в виде бесконтактного магнитного подвеса, в нижнюю часть инерционной массы введен стабилизирующий стержень. Зеркальная отражающая поверхность выполнена в виде узкого цилиндрического зеркала и расположена на поверхности инерционной массы, параллельной оси перемещения инерционной массы. В качестве волоконного кабеля, соединяющего базовую станцию с датчиком, применен одножильный многомодовый волоконный кабель. Количество датчиков может превышать один и достигать десяти, при этом датчики располагаются вдоль одножильного многомодового волоконного кабеля и связаны с одним модулем формирования, обработки и регистрации сигналов базовой станции. Количество модулей формирования, обработки и регистрации сигналов базовой станции соответствует количеству направлений сейсмосети на основе одножильных многомодовых волоконных кабелей с расположенными вдоль них датчиками. Кроме того, бесконтактный магнитный подвес выполнен в виде двух пар кольцевых магнитов. Кроме того, модуль формирования, обработки и регистрации сигналов базовой станции содержит контроллер связи с персональным компьютером, усилитель, аналого-цифровой преобразователь, синхрогенератор, приемник оптического излучения, формирователь импульсов управления приемником и импульсным источником излучения, токовый ключ, комплексированную оптическую схему передачи и приема оптических импульсов, импульсный лазер. Кроме того, узел соединения волоконного кабеля на базовой станции и датчиках выполнен с использованием стандартного оптического разъема.
Предлагаемое оптоволоконное устройство регистрации линейных перемещений решает задачу повышения технических характеристик: упрощение конструкции, возможность размещения на одном волоконном кабеле нескольких датчиков, в том числе на значительных удалениях от базовой станции, возможность организации системы контроля периметра (границ) территории или сейсморазведки при минимальной длине волоконного кабеля и произвольном размещении датчиков в пространстве, а также позволяет снизить трудовые и материальные затраты на формирование измерительной или охранной сети большой протяженности.
В частности, предлагаемое оптоволоконное устройство регистрации линейных перемещений позволяет реализовать различные зоны контроля и охраны территорий (границ), удаленные от базовой станции на значительные расстояния, включая расстояния до 10 км.
Более высокие технические характеристики предлагаемого устройства обеспечиваются новой совокупностью отличительных признаков:
- система подвеса инерционной массы выполнена в виде бесконтактного магнитного подвеса;
- в нижнюю часть инерционной массы введен стабилизирующий стержень;
- зеркальная отражающая поверхность выполнена в виде узкого цилиндрического зеркала и расположена на поверхности инерционной массы, параллельной оси перемещения инерционной массы;
- в качестве волоконного кабеля, соединяющего базовую станцию с датчиком, применен одножильный многомодовый волоконный кабель;
- количество датчиков может превышать один и достигать десяти, при этом датчики располагаются вдоль одножильного многомодового волоконного кабеля и связаны с одним модулем формирования, обработки и регистрации сигналов базовой станции;
- количество модулей формирования, обработки и регистрации сигналов базовой станции соответствует количеству направлений сейсмосети на основе одножильных многомодовых волоконных кабелей с расположенными вдоль них датчиками;
- бесконтактный магнитный подвес выполнен в виде двух пар кольцевых магнитов;
- модуль формирования, обработки и регистрации сигналов базовой станции содержит контроллер связи с персональным компьютером, усилитель, аналого-цифровой преобразователь, синхрогенератор, приемник оптического излучения, формирователь импульсов управления приемником и импульсным источником излучения, токовый ключ, комплексированную оптическую схему передачи и приема оптических импульсов, импульсный лазер;
- узел соединения волоконного кабеля на базовой станции и датчиках выполнен с использованием стандартного оптического разъема.
Выполнение системы подвеса инерционной массы в виде бесконтактного магнитного подвеса, в частности в виде двух пар кольцевых магнитов, использование стандартного оптического разъема (коннектора) в узле соединения волоконного кабеля на базовой станции и датчиках позволяет упростить конструкцию датчика, а также минимизировать потери на трение и на соединениях.
Выполнение соединения базовой станции с датчиком с помощью одножильного многомодового волоконного кабеля, а зеркальной отражающей поверхности - в виде узкого цилиндрического зеркала, расположенного на поверхности инерционной массы, параллельной оси перемещения последней, позволяет обеспечить возможность использовать один волоконный кабель как для передачи оптических сигналов с модуля формирования, обработки и регистрации сигналов базовой станции, так и для приема в обратном направлении отраженных от зеркальной поверхности оптических сигналов, обеспечивая низкие потери сигнала в многомодовом волоконном кабеле.
Введение в нижнюю часть инерционной массы стабилизирующего стержня обеспечивает удержание инерционной массы и цилиндрического зеркала от смещений в горизонтальной плоскости, что повышает устойчивость работы датчика при обеспечении простоты конструкции.
Использование количества датчиков более одного и расположение последних вдоль одножильного многомодового волоконного кабеля, связанного с одним модулем формирования, обработки и регистрации сигналов базовой станции, размещение на базовой станции такого количества модулей формирования, обработки и регистрации сигналов базовой станции, которое равно количеству направлений сейсмосети на основе одножильных многомодовых волоконных кабелей с расположенными вдоль них датчиками, обеспечивает возможность размещения на одном волоконном кабеле нескольких датчиков на необходимых расстояниях друг от друга, возможность организации системы контроля и охраны периметра (границ) территории или сейсморазведки при минимальной длине волоконного кабеля и произвольном размещении датчиков по периметру (границе) или другим произвольным образом в пространстве, что позволяет обеспечить любое число направлений контроля, разведки или охраны в зависимости от задач конкретной измерительной или охранной сети и снизить трудовые и материальные затраты на формирование измерительной или охранной сети большой протяженности.
Выполнение модуля формирования, обработки и регистрации сигналов базовой станции в виде контроллера связи с персональным компьютером, усилителя, аналого-цифрового преобразователя, синхрогенератора, приемника оптического излучения, формирователя импульсов управления приемником и импульсным источником излучения, комплексированной оптической схемы передачи и приема оптических импульсов, импульсного лазера с токовым ключом позволяет осуществлять последовательный опрос датчиков и регистрировать наличие линейных перемещений (колебаний) поверхности, на которой установлены датчики в зоне их размещения.
Предлагаемая совокупность отличительных признаков позволяет обеспечить в оптоволоконном устройстве регистрации линейных перемещений повышение технических характеристик: упрощение конструкции, возможность размещения на одном волоконном кабеле нескольких датчиков, возможность организации системы контроля периметра (границ) территории или сейсморазведки при минимальной длине волоконного кабеля и произвольном размещении датчиков в пространстве.
Указанное решение обладает новизной и изобретательским уровнем. Изобретение основано на впервые предложенных заявителями устройствах датчика, модуля формирования, обработки и регистрации сигналов базовой станции, системы подвеса инерционной массы, использовании одножильного многомодового волоконного кабеля для соединения базовой станции с датчиками, размещении нескольких датчиков на одном волоконном кабеле, размещении на базовой станции нескольких модулей, соответствующих нескольким направлениям регистрации (охраны, контроля). Авторам не известны оптоволоконные устройства регистрации линейных перемещений, в которых были бы реализованы указанные признаки.
Предложенное изобретение иллюстрируется следующими графическими материалами:
Фиг.1 - общая функциональная схема оптоволоконного устройства регистрации линейных перемещений.
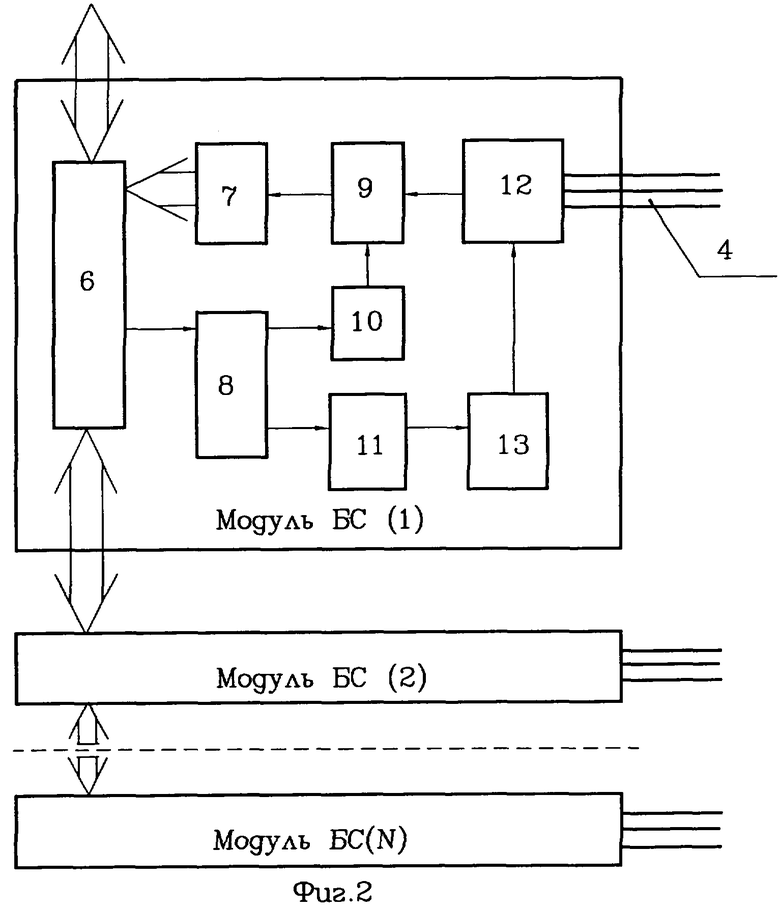
Фиг.2 - блок-схема модуля формирования, обработки и регистрации сигналов базовой станции.
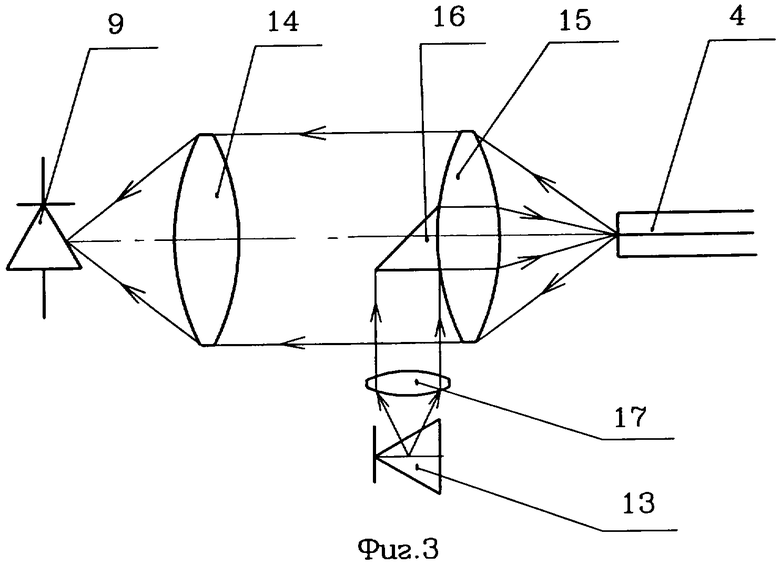
Фиг.3 - комплексированная оптическая схема передачи и приема оптических импульсов.
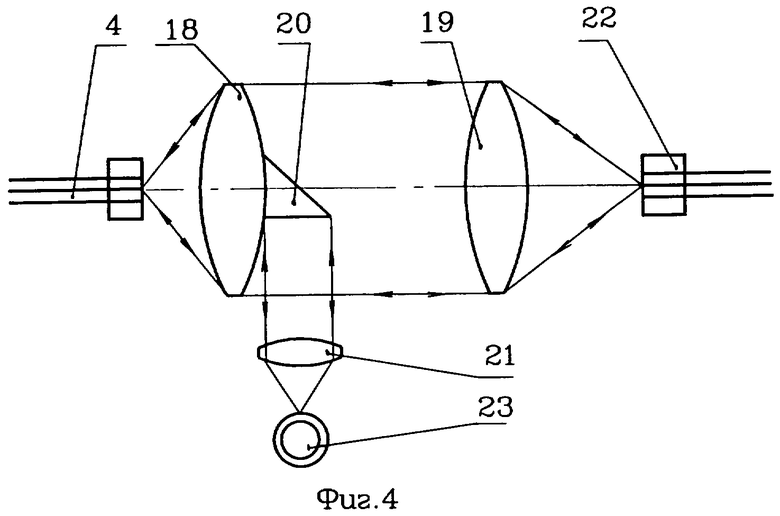
Фиг.4 - оптическая схема датчика линейных перемещений.
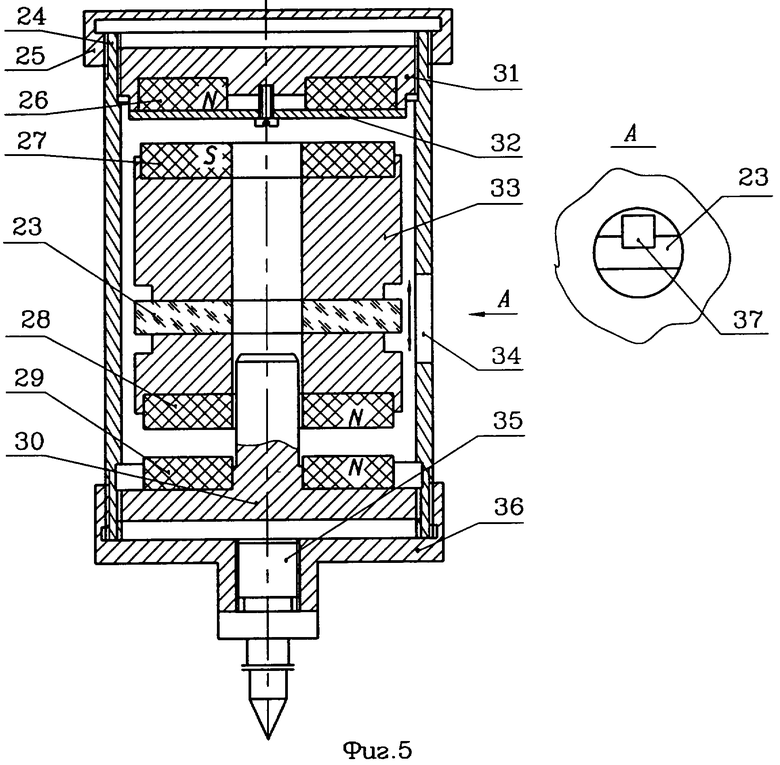
Фиг.5 - вариант конструктивного исполнения датчика.
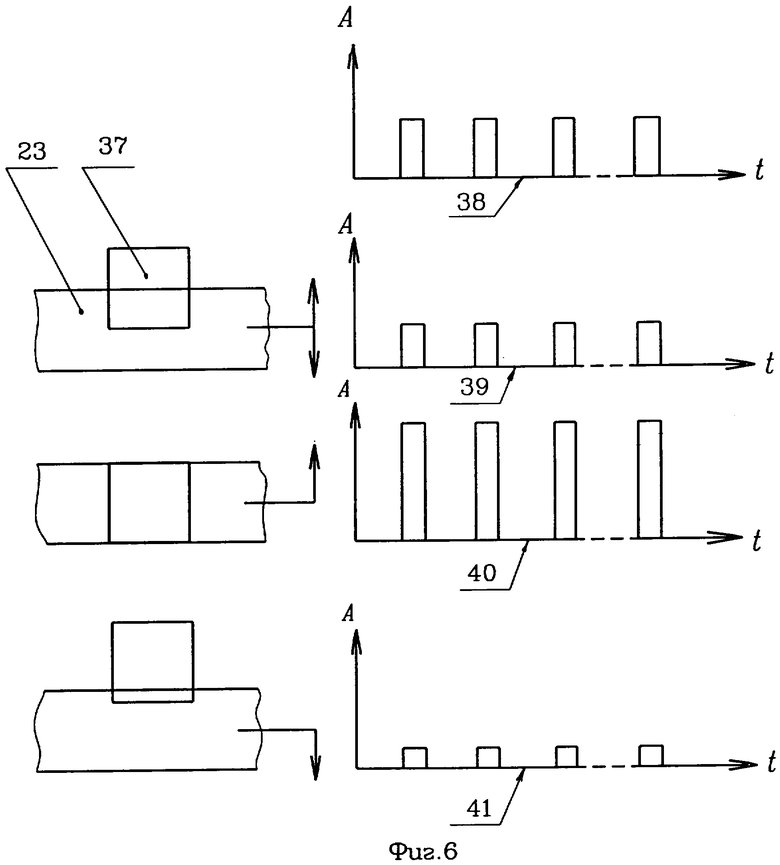
Фиг.6 - принцип получения отраженных модулированных оптических (электрических) сигналов.
На фиг.1 показана общая функциональная схема оптоволоконного устройства регистрации линейных перемещений, включающая базовую станцию 1 с персональным компьютером 2, модули формирования, обработки и регистрации сигналов 3, одножильный многомодовый волоконный кабель 4, датчики линейных перемещений 5. Датчики условно обозначены I, II, N. Базовая станция содержит один или несколько модулей формирования, обработки и регистрации сигналов. На фиг.2 эти модули условно обозначены «Модуль БС (1)», «Модуль БС (2)», «Модуль БС (N)». Блок-схема модуля формирования, обработки и регистрации сигналов содержит следующие блоки: 6 - контроллер связи с персональным компьютером; 7 - усилитель и аналого-цифровой преобразователь; 8 - синхрогенератор; 9 - приемник оптического излучения; 10 - формирователь импульсов управления приемником и импульсным источником излучения; 11 - токовый ключ; 12 - комплексированную оптическую схему передачи и приема оптических импульсов; 13 - импульсный лазер; 4 - одножильный многомодовый волоконный кабель (см. фиг.1).
Принципиальное устройство комплексированной оптической схемы передачи и приема оптических импульсов показано на фиг.3. Она содержит два одинаковых объектива 14 и 15, зеркало 16, объектив 17 и работает совместно с импульсным лазером 13 (см. фиг.2) и приемником оптического излучения 9.
Принципиальное устройство оптической схемы подключения датчика линейных перемещений 5 (см. фиг.1) показано на фиг.4. Оно включает два объектива 18 и 19, призму 20, приклеенную на объектив 18, объектив 21, оптический разъем 22 для подключения одножильного многомодового волоконного кабеля 4 (см. фиг.1) и цилиндрическое зеркало 23 (см. фиг.4).
Объективы 18, 19 и 14 (см. фиг.3), 15 выполнены одинаковыми.
Вариант конструктивного исполнения датчика 5 (см. фиг.1) показан на фиг.5 и состоит из следующих основных элементов: 23 - цилиндрическое зеркало; 24 - жесткий корпус; 25 - верхняя крышка; 26, 27, 28, 29 - магнитный подвес в виде кольцевых магнитов; 30 - стабилизирующий стержень; 31 - регулируемая гайка с верхним магнитом; 32 - немагнитная ограничивающая прокладка; 33 - инерционная масса; 34 - входное окно для оптической схемы подключения датчика; 35 - устройство крепления датчика, например, стержень установки датчика на грунт; 36 - нижняя крышка; 37 - световое пятно.
Фиг.6 иллюстрирует принцип получения отраженных модулированных оптических (электрических) сигналов при смещении светового пятна 37 относительно цилиндрического зеркала 23 при регистрации линейных перемещений основания, на котором закреплен датчик 5 (см. фиг.1), при этом график 38 соответствует входным оптическим импульсам (А - амплитуда сигнала, t - время); график 39 соответствует отраженным сигналам при отсутствии смещения инерционной массы 33 (см. фиг.5); график 40 (см. фиг.6) соответствует отраженным сигналам при смещении инерционной массы 33 (см. фиг.5) вверх; график 41 (см. фиг.6) соответствует отраженным сигналам при смещении инерционной массы 33 (см. фиг.5) вниз.
Принцип работы оптоволоконного устройства регистрации линейных перемещений основан на следующем:
- формировании в базовой станции 1 (см. фиг.1) оптических импульсов с определенной частотой повторения и ввода их в одножильный многомодовый волоконный кабель 4;
- приеме оптических сигналов, отраженных от цилиндрического зеркала 23 (см. фиг.5) одного из датчиков линейных перемещений 5 (см. фиг.1), приемником оптического излучения 9 (см. фиг.2), который включается к моменту прихода оптического импульса и регистрирует амплитуду электрического сигнала;
- регистрации сигналов с отдельного датчика 5 (см. фиг.1) по временной схеме, то есть по времени задержки оптического сигнала относительно стартового импульса передачи от базовой станции 1, в момент прихода оптического сигнала на приемник оптического излучения 9 (см. фиг.2) в соответствии со временем распространения светового импульса в одножильном многомодовом волоконном кабеле 4 (см. фиг.1) от базовой станции до датчика и обратно;
- преобразовании изменения амплитуды оптического сигнала в датчике при отражении от цилиндрического зеркала 23 (см. фиг.5), на которое направлено оптическое излучение, в зависимости от того, в каком положении находится инерционная масса 33, на которой расположено цилиндрическое зеркало 23, относительно корпуса 24 датчика при механических колебаниях;
- установке светового пятна 37, сформированного оптической схемой датчика, с помощью юстировочного узла, включающего регулируемую гайку 31 с верхним магнитом 26, в начальное положение (при отсутствии перемещений) одной своей половиной на зеркальную, второй - на поглощающую поверхности.
Предлагаемое оптоволоконное устройство регистрации линейных перемещений работает следующим образом. Сигналы от персонального компьютера 2 (см. фиг.1) запускают работу базовой станции 1, которая генерирует в модуле формирования, обработки и регистрации сигналов 3 оптические импульсы определенной длительности и частоты повторения, направляя их через оптический разъем в одножильный многомодовый волоконный кабель 4 и облучая датчики линейных перемещений 5. При наличии нескольких модулей на базовой станции в них проходят аналогичные процессы. Стартовый оптический импульс, дойдя до одного из датчиков линейных перемещений (например, первого), отражается от цилиндрического зеркала 23 (см. фиг.4), закрепленного на инерционной массе 33 (см. фиг.5), возвращается на базовую станцию 1 и через комплексированную оптическую схему передачи и приема оптических импульсов 12 (см. фиг.2) попадает на приемник оптического излучения 9. Приемник оптического излучения 9 регистрирует сигнал только в том случае, если на него будет подан сигнал разрешения, который формируется модулем формирования, обработки и регистрации сигналов 3 (см. фиг.1) через определенный временной интервал, соответствующий времени прохода оптического импульса от базовой станции 1 до датчика линейных перемещений 5 и обратно к ней. Этот временной интервал задержки отсчитывается от стартового сигнала и таким образом в соответствии с удаленностью датчика от базовой станции по времени задержки включения приемника происходит разделение сигналов от всех датчиков.
Работа каждого модуля формирования, обработки и регистрации сигналов 3, входящего в базовую станцию 1, происходит по следующей блок-схеме (см. фиг.2). Сигналы из контроллера связи с персональным компьютером 6 подаются в синхрогенератор 8, из которого выходят управляющие импульсы в токовый ключ 11 и импульсный лазер 13 для генерирования оптического импульса, который направляется через комплексированную оптическую схему передачи и приема оптических импульсов 12 в одножильный многомодовый волоконный кабель 4. Через заданный временной интервал оптический сигнал, отразившись от датчика линейных перемещений 5 (см. фиг.1), поступает в обратном направлении в тот же одножильный многомодовый волоконный кабель 4, а затем через комплексированную оптическую схему передачи и приема оптических импульсов 12 - на приемник оптического излучения 9. Через усилитель и аналого-цифровой преобразователь 7 и контроллер связи с персональным компьютером 6 сигнал передается в персональный компьютер 2 (см. фиг.1), где происходит его запись и анализ.
Так как длительность оптического импульса, который формируется базовой станцией 1 (см. фиг.1), значительно меньше времени прохождения оптического импульса от базовой станции к ближайшему датчику и обратно, то не происходит наложений зондирующих импульсов с принимаемыми и обеспечивается разделение сигналов от различных датчиков.
Конкретный пример реализации комплексированной оптической схемы передачи и приема оптических импульсов, представленный на фиг.3, работает следующим образом. Оптическое излучение импульсного лазера 13 через объектив 17, поворотное зеркало 16, объектив 15 направляется в одножильный многомодовый волоконный кабель 4, по которому передается на датчики линейных перемещений 5 (см. фиг.1). Обратное отраженное от датчика излучение импульса из одножильного многомодового волоконного кабеля 4 поступает на объектив 15 (см. фиг.3) и объективом 14 фокусируется на приемник оптического излучения 9.
При поступлении оптического импульса на объектив 18 (см. фиг.4) часть энергии импульса (примерно 5...10%) ответвляется через призму 20 и объективом 21 фокусируется на цилиндрическое зеркало 23 датчика линейных перемещений 5 (см. фиг.1). Отразившись от цилиндрического зеркала 23 (см. фиг.4), этот сигнал возвращается по одножильному многомодовому волоконному кабелю 4 на базовую станцию 1 (см. фиг.1), а зондирующий оптический импульс, сфокусированный объективом 19 на входную поверхность оптического разъема 22, распространяется по одножильному многомодовому волоконному кабелю, подключенному к оптическому разъему 22, к следующим датчикам. Так как оптический импульс, проходя через очередной датчик линейных перемещений, ослабевает на некоторую величину, то модулем формирования, обработки и регистрации сигналов 3 (см. фиг.1) регулируется величина оптической мощности импульсов импульсного лазера 13 (см. фиг.2), зондирующих конкретный датчик линейных перемещений.
Работа датчика линейных перемещений осуществляется следующим образом. Внутри жесткого корпуса 24 (см. фиг.5) расположена инерционная масса 33, на поверхности которой параллельно оси перемещения инерционной массы закреплено цилиндрическое зеркало 23. Инерционная масса 33 удерживается внутри корпуса 24 с помощью магнитного подвеса, выполненного в конкретном примере в виде двух пар кольцевых магнитов 26, 27 и 28, 29. В нижней части корпуса 24 имеется стабилизирующий стержень 30, обеспечивающий отсутствие смещений инерционной массы 33 в горизонтальной плоскости. Магнитный подвес инерционной массы 33 достигается отталкивающей силой кольцевых магнитов 28, 29, расположенных в нижней части корпуса 24 и ориентированных одинаковыми магнитными полюсами друг к другу, например N-N, и притягивающей силой кольцевых магнитов 26, 27, расположенных в верхней части корпуса 24 и ориентированных разноименными полюсами друг к другу, например N-S. Для исключения залипания верхних магнитов при больших амплитудах колебаний датчика в корпусе 24 установлена немагнитная ограничивающая прокладка 32. Регулируемая гайка 31 с верхним магнитом используется в процессе юстировки для регулировки начального положения цилиндрического зеркала 23 относительно оптической системы датчика. Демпфирование инерционной массы осуществляется двумя парами кольцевых магнитов 26, 27 и 28, 29, обеспечивая линейность преобразования механических колебаний в получаемый результирующий сигнал. Датчик крепится на основание с помощью устройства 35 крепления датчика, выполненного в конкретном примере в виде стержня установки датчика на грунт или на объект.
Оптические импульсы, выходящие с базовой станции 1 (см. фиг.1) и зондирующие датчики линейных перемещений 5, имеют вид, представленный на графике 38 (см. фиг.6), и после отражения от датчиков при отсутствии смещения инерционной массы 33 (см. фиг.5) имеют характер, представленный на графике 39 (см. фиг.6). При возникновении механических колебаний основания, на котором закреплен датчик, происходит смещение светового пятна 37 относительно цилиндрического зеркала 23 и характер отраженного сигнала меняется: график 40 соответствует отраженным сигналам при смещении инерционной массы 33 вверх; график 41 соответствует отраженным сигналам при смещении инерционной массы 33 вниз. При анализе отраженных сигналов с каждого датчика, осуществляемом в персональном компьютере 2 (см. фиг.1) по специальной программе, выявляется конкретный датчик, в зоне размещения которого имеют место линейные перемещения основания (механические колебания).
Предлагаемое оптоволоконное устройство регистрации линейных перемещений может быть использовано для решения задач сейсморазведки, контроля и охраны периметра территорий различных объектов от несанкционированного доступа, включая пограничные территории.
Литература
1. Патент РФ №2066467.
2. Патент РФ №2168743.
| название | год | авторы | номер документа |
|---|---|---|---|
| Герметичный рефлекторный волоконно-оптический датчик малых перемещений | 2024 |
|
RU2834216C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК УСКОРЕНИЯ | 1996 |
|
RU2146373C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ КОНЦЕНТРАЦИИ ГАЗООБРАЗНЫХ ВЕЩЕСТВ | 2014 |
|
RU2598694C2 |
| СПОСОБ ТЕПЛОВОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ТЕПЛОТЕХНИЧЕСКОГО СОСТОЯНИЯ ПРОТЯЖЕННЫХ, СЛОЖНОПРОФИЛЬНЫХ И ТРУДНОДОСТУПНЫХ ОБЪЕКТОВ | 2010 |
|
RU2428682C1 |
| Система измерения трёхмерного линейного и углового ускорения и перемещения объекта в пространстве с использованием волоконных брэгговских решеток | 2019 |
|
RU2716867C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ СИГНАЛОВ ПЕЛЕНГОВАНИЯ ОБЪЕКТА ВИЗИРОВАНИЯ ИНЕРЦИАЛЬНОГО И РАДИОЛОКАЦИОННОГО ДИСКРИМИНАТОРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2488137C2 |
| ОПТОВОЛОКОННЫЙ АКУСТИКО-ЭМИССИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПЛАСТИЧЕСКИХ ДЕФОРМАЦИЙ БОЛЬШИХ ИНЖЕНЕРНЫХ СООРУЖЕНИЙ | 2016 |
|
RU2650799C2 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ ИНЕРЦИАЛЬНОГО ПЕЛЕНГОВАНИЯ ЗАДАННОГО ОБЪЕКТА ВИЗИРОВАНИЯ И ИНЕРЦИАЛЬНЫЙ ДИСКРИМИНАТОР СИГНАЛОВ ПЕЛЕНГОВАНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2442185C2 |
| СПОСОБ МОНИТОРИНГА ВНУТРИСКВАЖИННЫХ ПАРАМЕТРОВ (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ ДОБЫЧИ НЕФТИ | 2012 |
|
RU2509888C2 |
Изобретение относится к области измерительной техники и может быть использовано для решения задач сейсморазведки, промышленного контроля и охраны периметра территорий. Оптоволоконное устройство регистрации линейных перемещений содержит, по крайней мере, один датчик, включающий герметичный корпус, инерционную массу с системой подвеса, магнитную демпфирующую систему, зеркальную отражающую поверхность и узел крепления волоконного кабеля, а также волоконный кабель, соединяющий датчик с базовой станцией, и базовую станцию, включающую модуль формирования, обработки и регистрации сигналов. При этом, система подвеса инерционной массы выполнена в виде бесконтактного магнитного подвеса, выполненного в виде двух пар кольцевых магнитов, в нижнюю часть инерционной массы введен стабилизирующий стержень, зеркальная отражающая поверхность выполнена в виде узкого цилиндрического зеркала и расположена на поверхности инерционной массы, параллельной оси перемещения инерционной массы. В качестве волоконного кабеля, соединяющего базовую станцию с датчиком, применен одножильный многомодовый волоконный кабель, количество датчиков выбирают в количестве от одного до десяти, при этом датчики располагаются вдоль одножильного многомодового волоконного кабеля и связаны с одним модулем формирования, обработки и регистрации сигналов базовой станции. Причем длительность оптического импульса, который формируется базовой станцией, значительно меньше времени прохождения оптического импульса от базовой станции к ближайшему датчику и обратно, количество модулей формирования, обработки и регистрации сигналов базовой станции соответствует количеству направлений сейсмосети на основе одножильных многомодовых волоконных кабелей с расположенными вдоль них датчиками. При этом модуль формирования, обработки и регистрации сигналов базовой станции содержит контроллер связи с персональным компьютером, сигналы из которого подаются в синхрогенератор, из которого выходят управляющие импульсы в токовый ключ и импульсный лазер, связанный через комплексированную оптическую схему передачи и приема оптических импульсов с одножильным многомодовым волоконным кабелем, приемник оптического излучения, регистрирующий сигнал с комплексированной оптической схемы передачи и приема оптических импульсов, связанный с усилителем и аналого-цифровым преобразователем, формирователь импульсов управления приемником и импульсным лазером. Узел соединения волоконного кабеля на базовой станции и датчиках выполнен с использованием оптического разъема. Технический результат - повышение технических характеристик: упрощение конструкции, возможность размещения на одном волоконном кабеле нескольких датчиков, в том числе, на значительных удалениях от базовой станции, возможность организации системы контроля периметра территории или сейсморазведки при минимальной длине волоконного кабеля, снижение трудозатрат и материальных затрат. 3 з.п. ф-лы, 6 ил.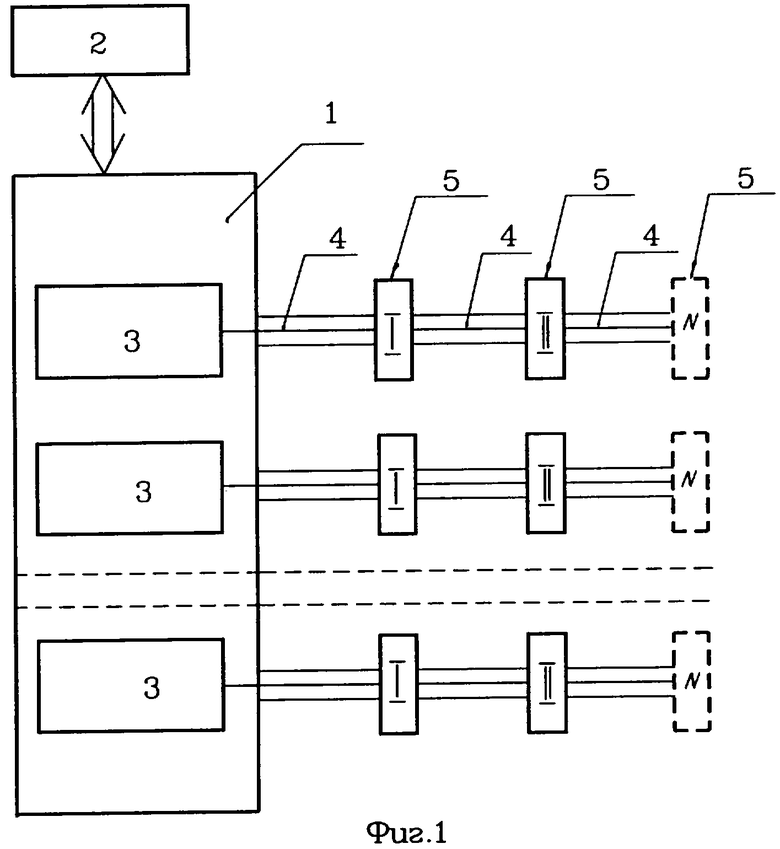
| ОПТОВОЛОКОННОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2168743C1 |
| RU 2066467 С1, 10.09.1996 | |||
| УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ СТРУКТУРЫ С ИСПОЛЬЗОВАНИЕМ СИГНАЛОВ, РАСПРОСТРАНЯЮЩИХСЯ ВО ВЗАИМНО ПРОТИВОПОЛОЖНЫХ НАПРАВЛЕНИЯХ, ДЛЯ ОПРЕДЕЛЕНИЯ ЛОКАЛИЗАЦИИ ВОЗМУЩЕНИЙ | 1999 |
|
RU2226270C2 |
| Сейсмоприемное устройство | 1990 |
|
SU1827657A1 |
| Геофон | 1990 |
|
SU1741095A1 |
| US 4322829 А, 30.03.1982. | |||

