Изобретение относится к области гидроакустики и может быть использовано при обнаружении малоподвижных объектов в условиях гидролокационного наблюдения в контролируемых условиях морской акваторий.
Известен способ автоматической классификации по патенту РФ №2461020, который содержит излучение зондирующего сигнала подвижным гидролокатором, прием эхосигнала, обработку информации в пространственных каналах статического веера характеристик направленности и по количеству характеристик направленности, в которых обнаружен объект, классификацию на малоразмерный объект или крупноразмерный объект. Известна система автоматической классификации подвижного гидролокатора по патенту РФ №2465618, который содержит излучение зондирующего сигнала, прием и обработку эхосигнала, идентификацию сигналов между каналами, измерение угловой протяженности объекта, измерение его радиальной протяженности, и принятие решения о классе объекта. Недостатком этих способов является то, что с их помощью нельзя классифицировать объекты на классы неподвижный и малоподвижный, поскольку сам гидролокатор движется, и эхосигналы, принимаемые гидролокатором, от посылки к посылке будут изменяться в зависимости от направления приема и скорости собственного движения.
Известен гидролокационный способ обнаружения подводных объектов, движущихся с малой скоростью в контролируемой акватории по патенту РФ №2242021. Гидролокационный способ обнаружения подводных объектов, движущихся с малой скоростью, включает последовательное облучение водного пространства гидроакустическими сигналами по различным направлениям с неподвижного гидролокатора, прием эхосигналов от объектов, фильтрацию и отображение на двухкоординатном индикаторе принятых эхосигналов, одновременно по М направлениям. При этом осуществляют К циклов излучение-прием, запоминают все принятые эхосигналы, дискретизируют по дистанции, отображают их на экране в виде яркостных отметок так, что по каждому из М направлений последовательно К раз отображается L элементов дистанции, сохраняют KL элементов и отображают на индикаторе L элементов последнего цикла излучение-прием, а решение об обнаруженном объекта по К-ому направлению принимают по появлению на индикаторе трассы, образованной яркостными отметками эхосигналов, полученными в циклах излучение-прием, классификацию неподвижных и малоподвижных объектов оператор осуществляет по наличию наклона трасс яркостных отметок.
Недостатком способа является то, что обнаружение объектов и классификация обнаруженных объектов производится оператором по виду информации, отображаемой на индикаторе, а классификация осуществляется по виду трассы при перемещении объекта, для чего требуется большое время наблюдения, порядка 15 циклов излучение-прием. Измерить радиальное перемещение объекта за меньшее число циклов и произвести классификацию этим техническим устройством практически невозможно.
Задачей изобретения является сокращение времени и автоматизация процедур классификации на подвижный и малоподвижный объект применительно к неподвижному гидролокатору.
Техническим результатом предлагаемого изобретения является обеспечение автоматического обнаружения объектов, автоматическое измерение радиальной скорости перемещения объекта и автоматическая классификация обнаруженных объектов и уменьшение времени принятия решения, необходимого для этого.
Для решения поставленной задачи в гидролокационный способ обнаружения подводных объектов, движущихся с малой скоростью, при котором последовательно облучают водное пространство зондирующими сигналами, принимают эхосигналы от объектов статическим веером характеристик направленности, фильтруют, запоминают все принятые эхосигналы, дискретизируют по дистанции по элементам дистанции L, отображают их на двухкоординатном индикаторе введены новые признаки, а именно: по первому циклу излучение-прием, по первым временным элементам дистанции L1 всех пространственных направлений М определяют помеху и выбирают порог, в каждом пространственном канале по всем элементам дистанции L сравнивают амплитуды эхосигналов с порогом и определяют амплитуду превышения порога и время превышения порога, определяют максимальную амплитуду отсчета, превысившего порог, определяют разность времен между началом элемента Lp, где р - номер элемента дистанции, в котором обнаружен эхосигнал, и временным положением отсчета максимальной амплитуды Δtmax1, определяют число N отсчетов в интервале Lp, превысивших порог, определяют радиальную протяженность ΔS объекта в элементе дистанции Lp по формуле ΔS=(tN-t1)C, где tN - время последнего отсчета, превысившего порог, t1 - время первого отсчета, превысившего порог в выбранном элементе дистанции, С - скорость распространения звука, запоминают измеренные параметры, производят следующий цикл излучение-прием, повторяют процедуру измерения, определяют те направления М и те элементы дистанции L, которые совпадают в первом и втором циклах излучение-прием, определяют радиальную скорость объекта по формуле Vрад=(Δt2max-Δt1max)C\ΔTk, где ΔTk - интервал между циклами излучение-прием, Δt2max - интервал между временным положением максимума и временем начала элемента дистанции второго цикла излучение-прием, формируют табло результатов классификации по измеренным параметрам: направлению Mi, в котором произошло обнаружение, номеру элемента дистанции Lp, числу превышений порога N, радиальной протяженности ΔS и радиальной скорости Vрад, если Vрад=0, то принимают решение, что объект неподвижный, если Vрад≠0, принимают решение, что объект малоподвижный, а решение о классе малоподвижного объекта принимает оператор по анализу измеренных параметров.
Сущность предлагаемого способа заключается в следующем. Обработка эхосигнала начинается сразу же после окончания излучения. На вход приемной системы поступают дискретизированные отсчеты с выхода приемного устройства последовательно по всем каналам. После измерения помехи и выбора порога следует процедура обнаружения эхосигнала, которая производится последовательно по всем каналам и по всем элементам дистанции. Определяются выбросы эхосигнала, превысившие порог, оценивают амплитуду эхосигнала, временное положение эхосигнала и пространственное положение эхосигнала, которое можно оценить по одной посылке. Подвижные объекты подразделяются на малоподвижные и быстроподвижные. К разряду малоподвижных объектов относятся подводные пловцы, морские животные и большие рыбы. В прототипе информация по каждому циклу излучение-прием сохранялась и накапливалась для формирования яркостной трассы и предъявления этой трассы оператору, что требовало большого объема памяти вычислительных средств и большого времени наблюдения. В предлагаемом техническом решении предлагается выбрать порог по помехе и после соответствующей обработки, по крайней мере, двух циклов излучение-прием определить пространственные каналы Mi, в которых произошло обнаружение, и элементы дистанции Lp, в которых произошло обнаружение. Если объекты неподвижны, то при неподвижном гидролокаторе эхосигналы от объектов будут находиться в одинаковых пространственных каналах и на одинаковых временных интервалах при последовательных циклах излучение-прием. Если объекты малоподвижные, то за время между посылками их перемещение будет незначительным и может оказаться незаметным при отображении на индикаторе в яркостном виде. Для реализации этого признака необходимо измерить величину задержки между временем начала элемента дистанции Lp и временным положением максимальной амплитуды эхосигнала Δtmax. Для неподвижного объекта эти интервалы будут равны с учетом флюктуаций, обусловленных качкой судна, на котором установлен гидролокатор. Как правило, качка судна в морской акватории составляет величину не больше одного метра, а вертикальное перемещение антенны гидролокатора еще меньше, что несущественно скажется на изменении временного интервала измерения по дальности. Если же объект перемещается горизонтально, то в этом случае наблюдается устойчивое изменение интервала времени в сторону увеличения или уменьшения и определяет радиальную скорость перемещения. За время 3-5 секунд, что соответствует нескольким циклам излучение прием, может измениться радиальное положение малоподвижного объекта во временном интервале обработки элемента дистанции и определена радиальная скорость сближения или удаления в одном пространственном канале. Таким образом, уже за 2 цикла излучение прием можно автоматически оценить изменение положение объекта в одном пространственном канале и автоматически измерить радиальную скорость и принять решение об обнаружении малоразмерного малоподвижного объекта в одном временном интервале. Так при скорости малоподвижного объекта 1 м/сек за время между 2 циклами излучение-прием объект переместится на 2 метра. При использовании зондирующего сигнала длительностью 1 мс точность измерения дистанции будет равна σ=0.7ΔtQ-0.5, где Q - отношение сигнал/помеха. Тогда при точности измерения дистанции бД=0,33 м и перемещении малоподвижного объекта на 2 метра, можно обеспечить измерение радиальной скорости при измерении положения объекта относительно начала временного интервала элемента дистанции Lp. Кроме того, можно измерить радиальную протяженность объекта ΔS и число отражающих точек от объекта N по числу отсчетов, превысивших порог по одному циклу излучение-прием в выбранном элементе дистанции Lp. Если радиальная протяженность меньше элемента дистанции ΔS<Lp, то принимается решение, что объект малоразмерный. Элементы дистанции между последовательными циклами излучение-прием можно последовательно выводить на индикатор и отображать по каждому обнаруженному объекту новую трассу, где будет фиксироваться положение эхосигнала от объекта во времени и изменение его временной конфигурации между циклами излучение-прием. Таким образом, будет предоставляться дополнительная классификационная информация оператору для окончательного принятия решения о классе объекта. Если объект перемещается быстро, то его положение может выйти за границы элемента дистанции, но программа выделит элемент дистанции, в котором обнаружен объект, и представит его оператору для дальнейшей обработки.
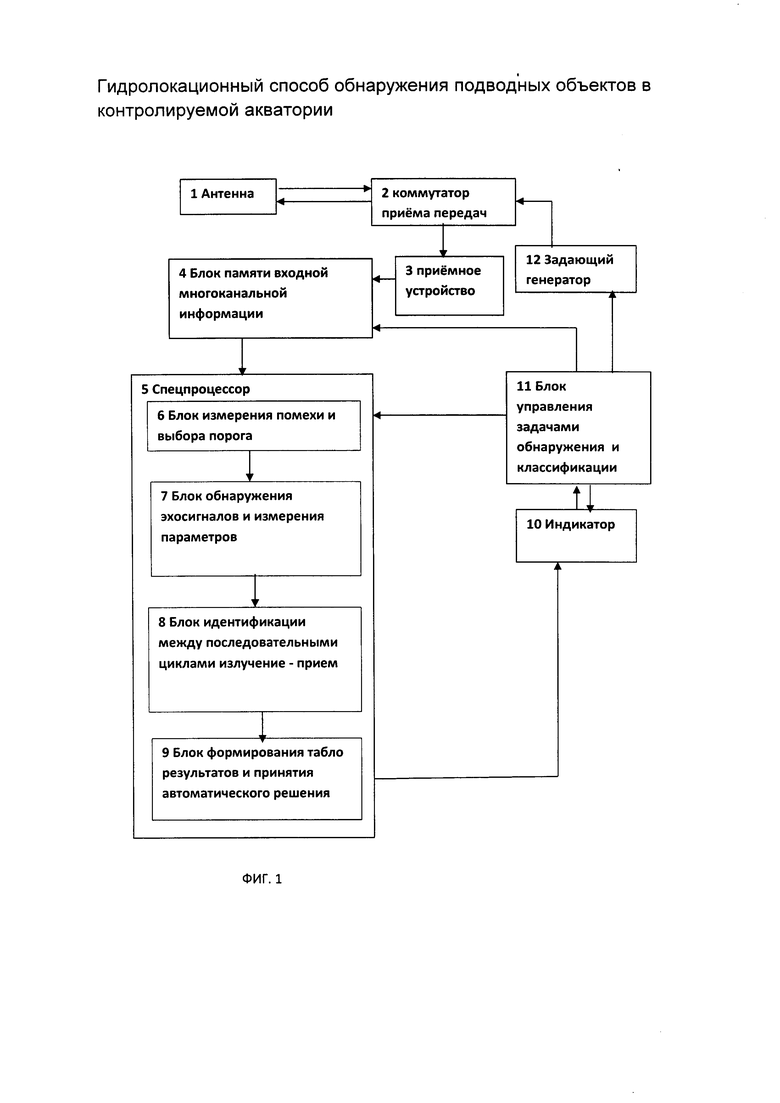
Сущность изобретения поясняется фиг. 1, на которой воспроизведена блок-схема устройства, реализующая предлагаемый способ.
На фиг. 1 антенна 1 соединена двухсторонней связью с коммутатором 2 приема передачи и далее через приемное устройство 3 и блок 4 памяти входной многоканальной информации со спецпроцессором 5, в который входят последовательно соединенные блок 6 измерения помехи и выбора порога, блок 7 обнаружения эхосигналов и измерения параметров, блок 8 идентификации между циклами излучение-прием, блок 9 формирования табло результатов и принятия автоматического решения. Выход спецпроцессора через индикатор 10, блок 11 управления задачами обнаружения и классификации, блок 12 задающий генератор соединен со вторым входом коммутатора 2 приема передачи. Второй выход блока 11 соединен со вторым входом блока 4, а третий выход блока 11 соединен со вторым входом процессора 5.
Блок 11 является известным устройством, который используется в прототипе, и представляет собой стандартный блок системы управления, который координирует работу всего гидролокатора. Антенна 1, коммутатор приема передачи 2, многоканально приемное устройство 3 используются в прототипе и известны как составные части современных гидролокаторов, также известен и используется в прототипе блок 4 памяти входной многоканальной информации.
С помощью устройства (фиг. 1) предложенный способ реализуется следующим образом.
Блок управления 11 задачами обнаружения и классификации подает сигнал на задающий генератор 12, который формирует зондирующий сигнал и через коммутатор приема передачи 2 излучает его в водное пространство с помощью антенны 1. После излучения сигнала коммутатор 2 переключается на прием входных эхосигналов и передает их через приемное устройство 3 в блок 4 памяти входной многоканальной информации. Собранные в блоке 4 дискретизированные временные отсчеты по всем М пространственным каналам и по всем временным интервалам элементов дистанции Lp используются при работе процессором 5. В устройстве 3 происходит дискретизация принятых аналоговых сигналов последовательно по всем характеристикам направленности в цифровую форму, набор временных реализаций, фильтрация и оптимальная обработка принятых сигналов и их передача в блок 4. Принципы цифрового преобразования и обработки достаточно подробно приведены в работе Рокотов С.П., Титов. М.С. «Обработка гидроакустической информации на судовых ЦВМ. Л.:Судостроение, 1979 г. Стр. 32…42. и «Применение цифровой обработки сигналов» п\р Оппенгейма М. Мир 1980 г. стр. 389…436. Управление работой блока 4 осуществляется процессором 5, который определяет последовательность формирования характеристик направленности, длительности набора входной информации и порядок их передачи для обнаружения и измерения пороговых сигналов. В блоке 6 процессора 5 отбираются входные отсчеты по первому циклу обработки всех характеристик направленности и формируется порог обнаружения, который поступает в блок 7 обнаружения эхосигналов и измерения параметров на каждом цикле излучение-прием. По каждой посылке, в каждом пространственном канале по всем элементам дистанции L сравнивают амплитуды эхосигналов с порогом и определяют амплитуду превышения порога и время превышения порога, определяют максимальную амплитуду отсчета, превысившего порог, определяют разность времен между началом элемента Lp, р - номер элемента дистанции, в котором обнаружен эхосигнал, и временным положением максимальной амплитуды Δtmax1, определяют число N отсчетов в элементе дистанции Lp, превысивших порог, определяют радиальную протяженность ΔS объекта в элементе дистанции Lp по формуле ΔS=(tN-t1)C, где tN - время последнего отсчета, превысившего порог, t1 - время первого отсчета, превысившего порог в выбранном интервале элемента дистанции.
Измеренные параметры передаются в блок 8 идентификации между последовательными циклами, где запоминаются и сравниваются с такими же параметрами, но измеренными на последующем цикле излучение-прием. Из всех эхосигналов, которые превысили порог, для дальнейшей обработки выбираются только те эхосигналы, которые обнаружены в одинаковых пространственных каналах и в одном и том же элементе дистанции Lp. Для этого набора параметров дополнительно измеряется радиальная скорость Vрад=(Δt2max-Δt1max)C\ΔTk, и передаются в блок 9 формирования табло результатов и принятия решения. В блоке 9 присваивается порядковый номер обнаруженного объекта, формируется табло результатов с измеренными параметрами и результаты предварительной классификации на классы малоразмерный объект и малоподвижный и совместно с временной информацией элемента дистанции Lp передаются в блок 10 индикатора для предоставления оператору. Оператор анализирует представленные параметры, на основании которых может дополнительно уточнить класс обнаруженного объекта с использованием блока управления 11 задачами обнаружения и классификации.
В настоящее время широкое распространение получили спецпроцессоры. Сигналы, преобразованные в цифровой вид, могут обрабатываться специальными цифровыми процессорами на основе разработанных алгоритмов и жесткой логике вычислений (см. Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. «Корабельная гидроакустическая техника». СПб Наука, 2004 г. Стр. 164-176, стр. 278-295). В процессоре могут быть реализованы все блоки предлагаемого устройства.
Таким образом, используя предлагаемую последовательность операций, можно обеспечить автоматическое обнаружение малоподвижного малоразмерного объекта, измерение классификационных признаков, формирование табло результатов и отображение временных реализаций обнаруженного объекта, что обеспечивает решение поставленной задачи за два цикла излучение-прием.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидролокационный способ классификации подводных объектов в контролируемой акватории | 2017 |
|
RU2650419C1 |
| Способ отображения гидролокационной информации | 2019 |
|
RU2726312C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ОБЪЕКТА В ВОДНОЙ СРЕДЕ | 2015 |
|
RU2602759C1 |
| Способ определения параметров цели гидролокатором | 2017 |
|
RU2650835C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ | 2011 |
|
RU2461020C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА И ИЗМЕРЕНИЯ ЕГО ПАРАМЕТРОВ | 2016 |
|
RU2627977C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2018 |
|
RU2697937C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СИГНАЛА ОТ ЦЕЛИ | 2011 |
|
RU2473924C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ОБЪЕКТА | 2016 |
|
RU2625041C1 |
| СПОСОБ КЛАССИФИКАЦИИ ОБЪЕКТА, ОБНАРУЖЕННОГО ГИДРОЛОКАТОРОМ | 2012 |
|
RU2490664C1 |
Изобретение относится к области гидроакустики и предназначено для автоматического обнаружения малоподвижных объектов. Гидролокационный способ обнаружения подводных объектов в контролируемой акватории, при котором последовательно облучают водное пространство сигналами, принимают эхосигналы от объектов статическим веером характеристик направленности, дискретизируют по дистанции, отображают их на двухкоординатном индикаторе, по первому циклу излучение-прием, по первым элементам дистанции всех пространственных направлений М определяют помеху и выбирают порог, в каждом пространственном канале по всем элементам дистанции L сравнивают амплитуды эхосигналов с порогом и определяют амплитуду превышения порога и время превышения порога, определяют максимальную амплитуду отсчета, превысившего порог, определяют разность времен между началом элемента Lp, р - номер элемента дистанции, в котором обнаружен эхосигнал, и временным положением максимальной амплитуды Δtmax1, определяют число N отсчетов в интервала Lp, превысивших порог, определяют радиальную протяженность ΔS объекта в элементе дистанции Lp по формуле ΔS=(tN-t1)C, где tN время последнего отсчета, превысившего порог, t1 - время первого отсчета, превысившего порог в выбранном интервале, С - скорость распространения звука, запоминают измеренные параметры, производят следующий цикл излучение-прием, повторяют процедуру измерения, определяют те направления М и те элементы дистанции L, которые совпадают в первом и втором циклах излучение-прием, определяют радиальную скорость объекта по формуле Vрад=(Δt2max-Δt1max)C\ΔTk, где ΔTk - интервал между циклами излучение-прием, Δt2max - интервал между временным положением максимума и временем начала элемента дистанции второго цикла излучение-прием, формируют табло результатов классификации по измеренным параметрам: направлению Mi, в котором произошло обнаружение, номеру элемента дистанции Lp, числу превышений порога N, радиальной протяженности ΔS, радиальной скорости Vрад, автоматически принимают решение, если ΔS<Lp, то объект малоразмерный, если Vрад=0, то принимают решение, что объект неподвижный, если Vрад≠0, принимают решение, что объект малоподвижный, а решение о классе малоподвижного, малоразмерного объекта принимает оператор по анализу измеренных параметров. 1 ил.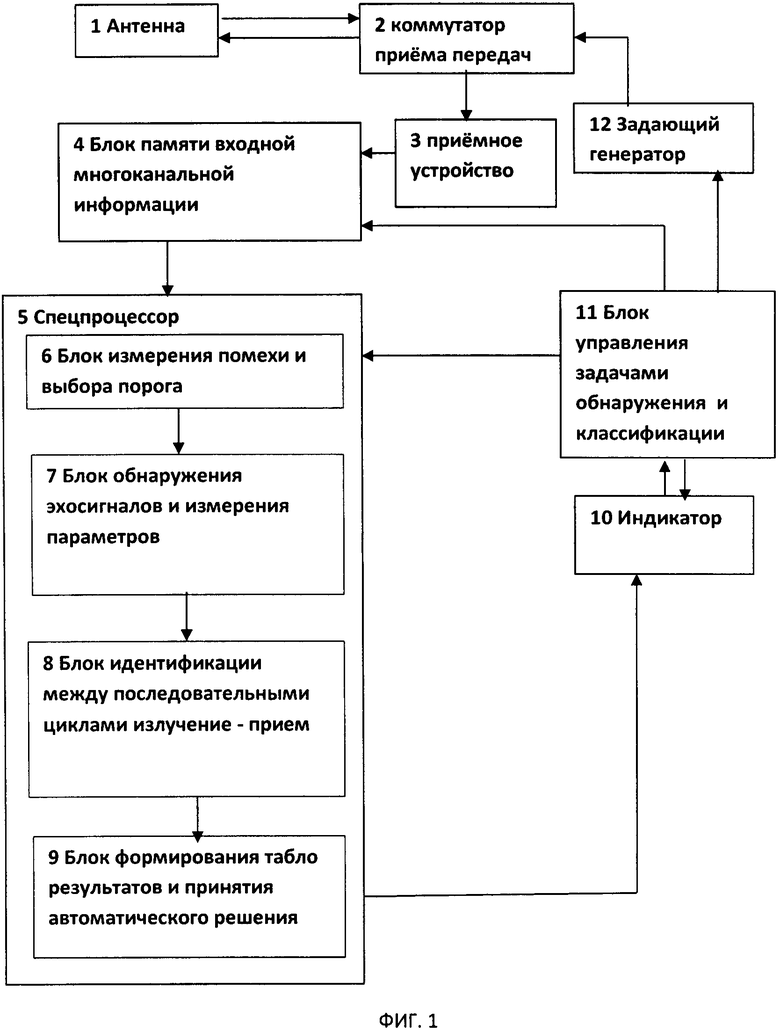
Гидролокационный способ обнаружения подводных объектов в контролируемой акватории, движущихся с малой скоростью, при котором последовательно облучают водное пространство зондирующими сигналами, принимают эхосигналы от объектов статическим веером характеристик направленности, фильтруют, запоминают все принятые эхосигналы, дискретизируют по дистанции по элементам L, отображают их на двухкоординатном индикаторе, отличающийся тем, что по первому циклу излучение-прием, по первым элементам дистанции всех пространственных направлений M определяют помеху и выбирают порог, в каждом пространственном канале по всем элементам дистанции L сравнивают амплитуды эхосигналов с порогом и определяют амплитуду превышения порога и время превышения порога, определяют максимальную амплитуду отсчета, превысившего порог, определяют разность времен между началом элемента Lp, где p - номер элемента дистанции, в котором обнаружен эхосигнал, и временным положением отсчета с максимальной амплитуды Δtmax1, определяют число N отсчетов в интервала Lp, превысивших порог, определяют радиальную протяженность ΔS объекта в элементе дистанции Lp по формуле ΔS=(tN-t1)C, где tN - время последнего отсчета, превысившего порог, t1 - время первого отсчета, превысившего порог в выбранном элементам дистанции L, C - скорость распространения звука, запоминают измеренные параметры, производят следующий цикл излучение-прием, повторяют процедуру измерения, определяют те направления M и те элементы дистанции L, которые совпадают в первом и втором циклах излучение-прием, определяют радиальную скорость объекта по формуле Vрад=(Δt2max-Δt1max)С\ΔTk, где ΔTk - интервал между циклами излучение-прием, Δt2max - интервал между временным положением максимума и временем начала элемента дистанции второго цикла излучение-прием, формируют табло результатов классификации по измеренным параметрам: направлению Mi, в котором произошло обнаружение, номеру элемента дистанции Lp, числу превышений порога N, радиальной протяженности ΔS, радиальной скорости Vрад, автоматически принимают решение, если ΔS<Lp, то объект малоразмерный, если Vрад=0, то принимают решение, что объект неподвижный, если Vрад≠0, принимают решение, что объект малоподвижный, а решение о классе малоподвижного, малоразмерного объекта принимает оператор по анализу измеренных параметров.
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2012 |
|
RU2495448C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2011 |
|
RU2460088C1 |
| RU2003122012 A, 10.01.2005 | |||
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ НИЗКИХ ЗВУКОВЫХ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ МОРСКИХ БИОЛОГИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2152627C1 |
| УСТРОЙСТВО ДЛЯ ПОДЗЕМНОЙ РАЗРАБОТКИ ГРУНТА И СПОСОБ РЕГУЛИРОВАНИЯ ВНУТРЕННЕГО ДАВЛЕНИЯ В ЕГО ПЕРЕДАТОЧНОМ МЕХАНИЗМЕ | 2004 |
|
RU2292424C2 |

