Изобретение относится к области гидроакустики и может быть использовано при проектировании и разработке систем активной гидролокации для освещения ближней обстановки.
Известна навигационная гидроакустическая станция освещения ближней обстановки (НГАС ОБО) по патенту РФ №2225991 от 24.12.2001 г. Станция реализует следующую последовательность операций: излучение сигнала, прием эхосигнала, предварительную обработку, измерение параметров эхосигнала, определение классификационных признаков, измерение скорости звука, прослушивание сигнала шумоизлучения, классификацию целей по измеренным классификационным признакам и отображение на индикаторе в яркостном виде.
Известна навигационная гидроакустическая станция освещения ближней обстановки (полезная модель, патент РФ №117646 от 27/06/2012). Станция реализует следующую последовательность операций: излучение сигнала, прием эхосигнала носовой антенной, кормовой антенной и крестообразной антенной, коммутацию входных сигналов от разных антенн, предварительную обработку, измерение параметров эхосигнала, определение классификационных признаков, измерение скорости звука, классификацию целей по измеренным классификационным признакам и отображение на индикаторе. При использовании крестообразной антенны обеспечивается обзор и отображения пространства в вертикальной плоскости.
Недостатком этих технических решений является то, что измерение параметров и принятие решения о наличии эхосигнала от цели производится оператором по виду отображаемых отметок на яркостном индикаторе в координатах дальность.
Известен гидролокационный способ обнаружения подводных объектов, движущихся с малой скоростью в контролируемой акватории по патенту РФ №2242021. Гидролокационный способ обнаружения подводных объектов, движущихся с малой скоростью, включает последовательное облучение водного пространства гидроакустическими сигналами по различным направлениям с неподвижного гидролокатора, прием эхосигналов от объектов, фильтрацию и отображение на двухкоординатном индикаторе принятых эхосигналов, одновременно по М направлениям. При этом осуществляют К циклов «излучение - прием», запоминают все принятые эхосигналы, дискретизируют по дистанции, отображают их на экране в виде яркостных отметок так, что по каждому из М направлений последовательно К раз отображается L элементов дистанции, сохраняют КL элементов и отображают на индикаторе L элементов последнего цикла излучения прием, а решение об обнаруженном объекта по К-тому направлению принимают по появлению на индикаторе трассы, образованной яркостными отметками эхосигналов, полученными в циклах «излучение - прием», классификацию неподвижных и малоподвижных объектов оператор осуществляет по наличию наклона трасс яркостных отметок.
Недостатком данного технического решения является отображение полученной информации в яркостном виде на плоскости, что не позволяет проводить достоверное обнаружение и своевременную классификацию. Следует отметить, что в этом способе производится цифровая обработка входной информации, но отображение результатов производится в яркостном виде.
Задачей настоящего изобретения является повышение качества информации, предоставляемой оператору для принятия решения об обнаруженной цели.
Техническим результатом является предоставление оператору дополнительной информации о характерных амплитудных и структурных свойствах обнаруженных объектов по одному циклу излучение - прием, что приводит к повышению вероятности обнаружения и классификации.
Заявленный технический результат обеспечивается тем, что в способ, отображения гидролокационной информации, при котором одновременно облучают пространство ненаправленной в горизонтальном плоскости антенной, принимают эхосигнал цилиндрической антенной, имеющей статический веер направленности в горизонтальной плоскости по М направлениям, по каждому из М направлений сигналы дискретизируют последовательно К раз по дистанции облучения водного пространства, по каждому из М направлений последовательно К раз отображают элементы дистанции, введены новые признаки, а именно все принятые эхосигналы в одном цикле излучения - приема запоминают, измеряют амплитуды всех принятых эхосигналов, определяют среднее значение по измеренным амплитудам Аср и среднеквадратичное отклонение СКО, определяют порог как Аср+ ЗСКО, определяют все сигналы, превысившие порог, измеряют их амплитуды и временное положение амплитуд, превысивших порог, все сигналы нормируют к сигналу с максимальной амплитудой, формируют эллипсоидную картину отображения М направлений, в которой максимальная ось эллипса расположена по направлению движения гидролокатора, а малая ось перпендикулярна положению большой оси, на большой и малой оси эллипса отображается вся информация по дистанции гидролокатора, при этом на малой оси эллипса размер вывода между отсчетами уменьшен на величину Р-раз, где Р регулируемый параметр, нормированные амплитуды принятых дискретизированных отсчетов одновременно по всем направлениям отображают в цвете, при этом цвет амплитуды отсчета изменяют от темно-синего, что соответствует минимальной амплитуды сигнала, до белого, что соответствует максимальной амплитуде при нормировке.
Дополнительно изменяя длину малой оси эллипса, можно выбрать лучшую структуру отображения принятых эхосигналов, а изменяя направление главной оси эллипса, можно изменять структуру пространственного отображения, что позволяет лучше оценивать пространственное положение эхосигнала и его структуру.
Поясним сущность предлагаемого технического решения.
В прототипе, да и во всех известных системах отображения пространственной обстановки современных гидролокаторов, используется яркостное отображения выводимой информации. При этом отображении на плоскость индикатора экрана одновременно выводится вся информация по всем пространственным каналам по всей шкале дистанции в яркостном виде на площадь круга. В этом случае яркость отметки характеризует амплитуду эхосигнала. Поскольку динамический диапазон яркости ограничен, то оператор не может оценить амплитудные и пространственные характеристики эхосигнала и, соответственно, оператор ограничен в выборе принятия решения о классе обнаруженного объекта.
Предлагается изменить структуру отображения на индикаторе, для чего необходимо обеспечить вывод эхосигналов в амплитудном виде по всем характеристикам направленности по всей шкале дистанции. Для обеспечения иллюзии объемного отображения формируется вывод информации не на площадь круга, а на площадь эллипса. Большая ось эллипса направлена на положение нулевой характеристики направленности и на ней производится отображение амплитуд эхосигнала по всей шкале дистанции. На малую ось эллипса шкала дистанции остается та же, но интервал отсчета по шкале уменьшается при том же числе отсчетов. Формирование эллипса позволяет создать иллюзию объемного отображения амплитудной информации по всем пространственным каналам. Поскольку число отсчетов остается одинаковым по всем пространственным характеристикам направленности, то интервал между отсчетами изменяется от минимального по характеристикам направленности малой оси эллипса, до максимальной по характеристикам направленности большой оси эллипса. Эхосигналы, обнаруженные в различных характеристиках направленности, будет иметь смещение по дистанции относительно характеристики направленности, в которой произошло первичное обнаружение. Таким образом, создается иллюзия объемного отображения эхосигнала, в котором входит нормированная амплитуда, пространственное отображение эхосигнала и смещение амплитуд эхосигнала по дистанции и по пространству. При этом оператор имеет возможность изменять положение нулевой характеристики направленности и отображать ту часть пространственного положения объекта, на котором эхосигнал наиболее четко отображает свойства объекта. Нормирование ограничивает максимальную амплитуду эхосигналов, поэтому при отображении в круге большая амплитуда реверберации может закрыть отражение от эхосигнала. В этом случае оператор может изменить положение нулевой характеристики направленности и вывести малоразмерный объект из зоны затенения.
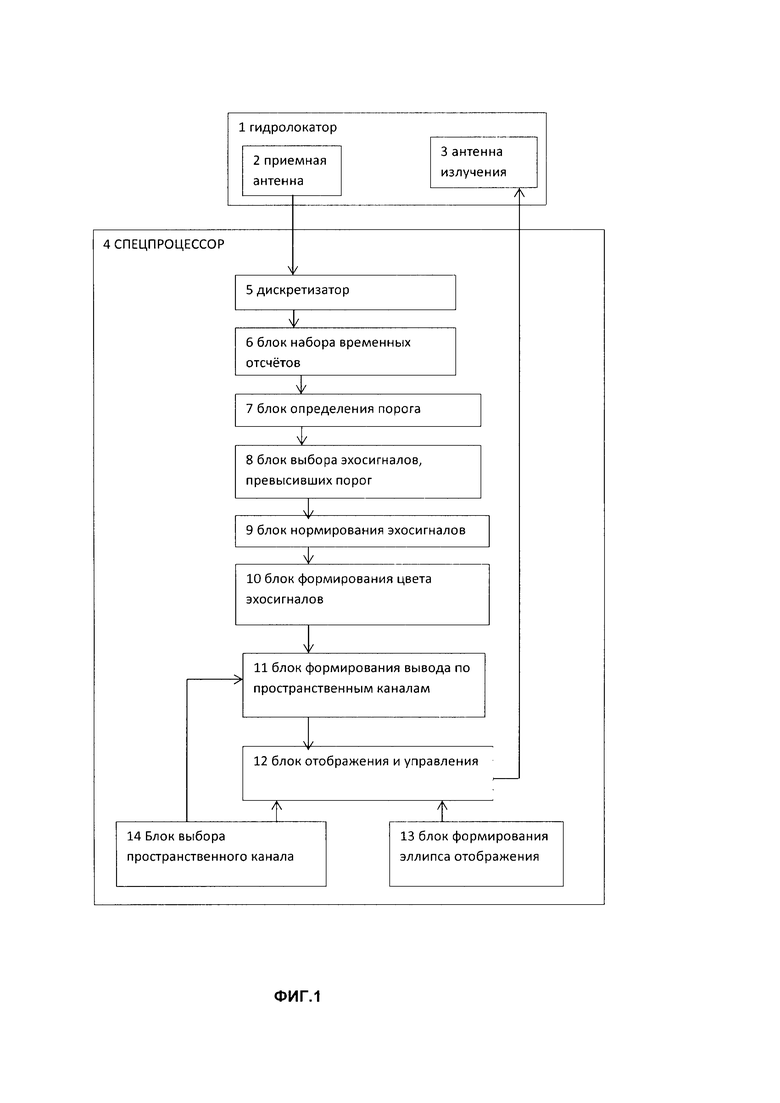
Сущность изобретения поясняется фиг. 1, на которой приведена блок схема устройства, реализующего способ.
Устройство (фиг. 1) содержит гидролокатор 1, излучающую антенну 2, приемную антенну 3 и спецпроцессор обработки 4, В состав спецпроцессора 4 входят последовательно соединенные дискретизатор 5, блок 6 набора временных отсчетов эхосигнала, блок 7 определения порога, блок 8 выбора эхосигналов превысивших порог, блок 9 нормирования эхосигналов, блок 10 формирования цвета эхосигналов, блок 11 формирования вывода по пространственным каналам, блок 12 отображения и управления, блок 13 формирования эллипса отображения, блок 14 выбора положения пространственного канала. Выход блока 12 соединен со входом гидролокатора, второй его вход соединен с выходом блока 13 формирования эллипса отображения, а третий вход соединен с выходом блока 14 формирования пространственного канала. Выход блока 14 соединен со вторым входом блока 11.
Гидролокатор 1 является известным устройством, который достаточно подробно описан в технической литературе (А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» Санкт-Петербург «Наука» 2004 г. стр. 152, 340), и так же используется в прототипе. Станция использует статический веер характеристик направленности для приема эхосигналов по всему пространству. Обработка цифровой информации, принимаемая антенной 2, производится с использованием спецпроцессора обработки 4. Вопросы реализации спецпроцессоров достаточно подробно рассмотрены (там же, стр. 281). Это известные типовые операции при определении статистических оценок измеренных параметров эхосигнала сигнала и формирования процедуры вывода. Для качественного решения задач обработки гидроакустической информации в современных корабельных гидроакустических средствах (станциях) используются спецпроцессоры на основе ЦВС, обладающие высокой производительностью, функциональной надежностью и малыми габаритами. С использованием специального алгоритмического и программного обеспечения спецпроцессорами могут решаться все задачи формирования и обработки принимаемых гидроакустических сигналов, в том числе для измерения параметров эхосигнала по всем пространственным каналам и решения задач отображения и управления процессом излучения и приема эхосигналов. (А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» Санкт-Петербург «Наука» 2004 г. стр. 281)
С использованием предлагаемой аппаратуры реализация способа осуществляется следующим образом. С блока отображения и управления 12 подается сигнал на излучение зондирующего сигнала гидролокатором и начала обработки входной информации спецпроцессором обработки 4. Сигналы от всех пространственных каналов поступают через дискретизатор 5 на блок 6 набора временных отсчетов по всем пространственным каналам. В блоке 7 определяется среднее значение и среднеквадратичное отклонение всех поступивших амплитуд, на основании чего определяется порог обнаружения, значение которого передается в блок 8, где производится выбор сигналов превысивших порог. Эта операция необходима для того, что бы исключить отображения маломощных сигналов, которые не несут никакой полезной информации. Все выбранные эхосигналы, которые превысили порог, со значением амплитуды и временного отсчета передаются в блок 9, где выбирается сигнал с максимальной амплитудой и относительно его производится нормировка всех остальных сигналов. В блоке 10 производится формирование цвета амплитуды эхосигнала от темно синего для минимального значения, до белого для максимального значения. Подготовленные таким образом эхосигналы подаются в блок 11 для формирования процедуры вывода на индикатор отображения в блоке 12. В блоке 13 производится формирования эллипса отображения, параметры которого задает оператор из блока 12. Так же оператор, используя блок 14, может задать параметры пространственного канала, который требует детального отображения и подготавливает исходные данные для изменения положения осей эллипса. Эти параметры позволяют поворачивать оси эллипса таким образом, чтобы эхосигнал на выбранном канале представлялся оператору с наибольшей информативностью.
Таким образом, решается задача формирования квазиобъемного отображения входной информации для использования в гидролокаторах кругового обзора, которая обеспечивает оператора наилучшие условия анализа выводимой информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ отображения гидролокационной информации | 2019 |
|
RU2724245C1 |
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ | 2015 |
|
RU2593824C1 |
| Способ обработки и классификации гидролокационной информации | 2019 |
|
RU2725517C1 |
| Способ обработки гидролокационной информации | 2018 |
|
RU2694269C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529441C1 |
| Гидролокационный способ классификации подводных объектов в контролируемой акватории | 2017 |
|
RU2650419C1 |
| Система автоматического обнаружения и классификации | 2020 |
|
RU2758586C1 |
| Способ обработки гидролокационной информации | 2017 |
|
RU2660081C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2015 |
|
RU2603228C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2016 |
|
RU2634787C1 |
Изобретение относится к области гидроакустики и может быть использовано при проектировании и разработке систем активной гидролокации для освещения ближней обстановки. Техническим результатом является предоставление оператору дополнительной информации о характерных амплитудных и структурных свойствах обнаруженных объектов по одному циклу излучение - прием, что приводит к повышению вероятности обнаружения и классификации. Способ отображения гидролокационной информации, при котором одновременно облучают пространство ненаправленной в горизонтальном плоскости антенной, принимают эхо-сигнал цилиндрической антенной, имеющей статический веер направленности в горизонтальной плоскости по М направлениям, по каждому из М направлений сигналы дискретизируют последовательно К раз по дистанции облучения водного пространства, по каждому из М направлений последовательно К раз отображают элементы дистанции, все принятые эхо-сигналы в одном цикле излучения - приема запоминают, измеряют амплитуды всех принятых эхо-сигналов, определяют среднее значение по измеренным амплитудам Аср, определяют все сигналы, превысившие порог, измеряют их амплитуды и временное положение амплитуд, превысивших порог, все сигналы нормируют к сигналу с максимальной амплитудой, формируют эллипсоидную картину отображения М направлений, при этом на малой оси эллипса размер вывода между отсчетами уменьшен на величину Р-раз, где Р - регулируемый параметр, нормированные амплитуды принятых дискретизированных отсчетов одновременно по всем направлениям отображают в цвете, при этом цвет амплитуды отсчета изменяют от темно-синего, что соответствует минимальной амплитуде сигнала, до белого, что соответствует максимальной амплитуде при нормировке. 2 з.п. ф-лы, 1 ил.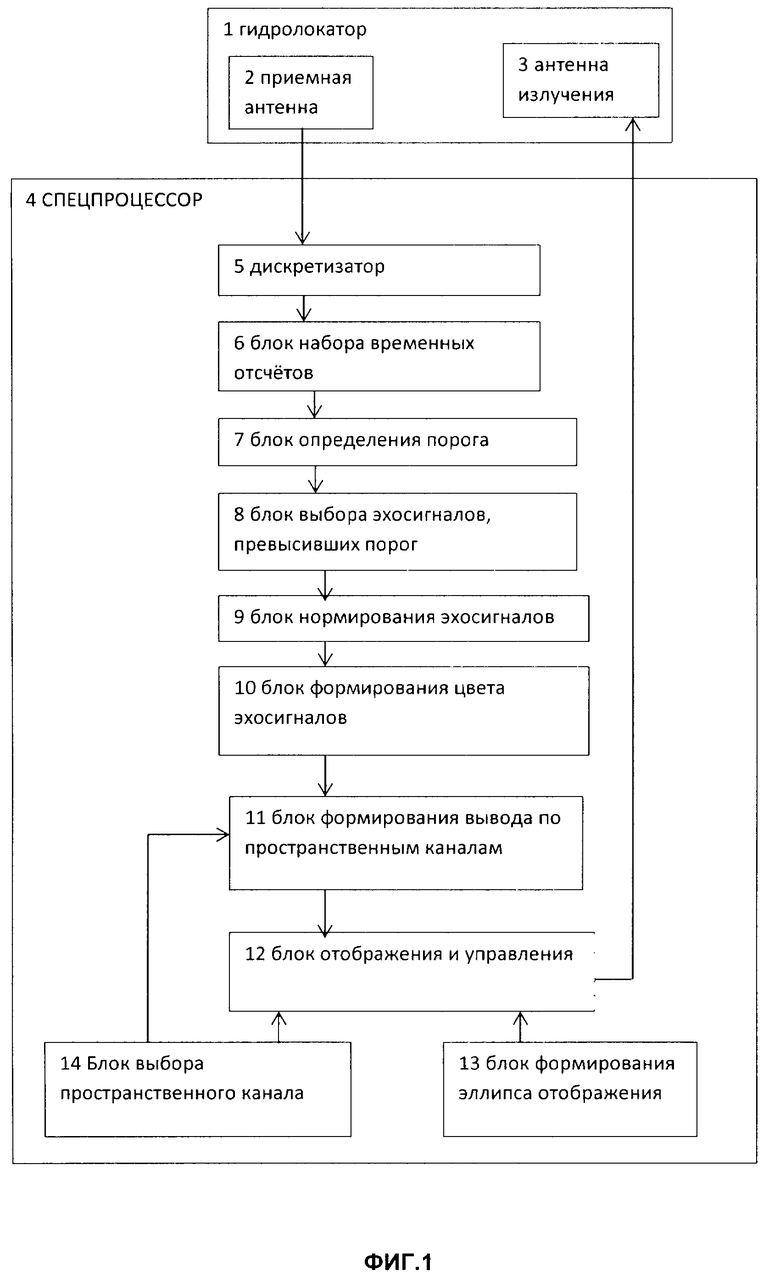
1. Способ отображения гидролокационной информации, при котором одновременно облучают пространство ненаправленной в горизонтальном плоскости антенной, принимают эхо-сигнал цилиндрической антенной, имеющей статический веер направленности в горизонтальной плоскости по М направлениям, по каждому из М направлений сигналы дискретизируют последовательно К раз по дистанции облучения водного пространства, по каждому из М направлений последовательно К раз отображают элементы дистанции, отличающийся тем, что все принятые эхо-сигналы в одном цикле излучения - приема запоминают, измеряют амплитуды всех принятых эхо-сигналов, определяют среднее значение по измеренным амплитудам Аср и среднеквадратичное отклонение СКО, определяют порог как Аср+ ЗСКО, определяют все сигналы, превысившие порог, измеряют их амплитуды и временное положение амплитуд, превысивших порог, все сигналы нормируют к сигналу с максимальной амплитудой, формируют эллипсоидную картину отображения М направлений, в которой максимальная ось эллипса расположена по направлению движения гидролокатора, а малая ось перпендикулярна положению большой оси, на большой и малой осях эллипса отображается вся информация по дистанции гидролокатора, при этом на малой оси эллипса размер вывода между отсчетами уменьшен на величину Р-раз, где Р - регулируемый параметр, нормированные амплитуды принятых дискретизированных отсчетов одновременно по всем направлениям отображают в цвете, при этом цвет амплитуды отсчета изменяют от темно-синего, что соответствует минимальной амплитуде сигнала, до белого, что соответствует максимальной амплитуде при нормировке.
2. Способ по п. 1, отличающийся тем, что дополнительно изменяют длину малой оси эллипса, меняя структуру отображения принятых эхо-сигналов
3. Способ по п. 1 или 2, отличающийся тем, что дополнительно изменяют направление большой оси эллипса, изменяя при этом пространственную структуру отображения.
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ, ДВИЖУЩИХСЯ С МАЛОЙ РАДИАЛЬНОЙ СКОРОСТЬЮ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ, И ГИДРОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2002 |
|
RU2242021C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРИХОДА ЭХОСИГНАЛА (ВАРИАНТЫ) | 2001 |
|
RU2219563C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЭХОСИГНАЛА ГИДРОЛОКАТОРА | 2005 |
|
RU2293358C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СИГНАЛА ОТ ЦЕЛИ | 2011 |
|
RU2473924C1 |
| СПОСОБ КЛАССИФИКАЦИИ ОБЪЕКТА, ОБНАРУЖЕННОГО ГИДРОЛОКАТОРОМ | 2012 |
|
RU2490664C1 |
| СПОСОБ ОБРАБОТКИ ЭХОСИГНАЛА ГИДРОЛОКАТОРА | 2013 |
|
RU2528556C1 |

