Изобретение относится к области гидроакустики и может быть использовано для построения систем автоматического обнаружения эхосигналов, принятых гидролокатором на фоне шумовой и реверберационной помехи и измерения параметров объекта при использовании псевдошумовых сигнлов в условиях применения преднамеренных помех.
Известны способы обнаружения эхосигнала, основанные на определении энергетического спектра электрического процесса, представляющего собой смесь электрического сигнала и нормальной стационарной шумовой помехи, изложенные, например, в работе Евтютов Е.С. и Митько В.Б. "Примеры инженерных расчетов в гидроакустике", Судостроение 1981 г, с. 77. Способ содержит спектральный анализ этого процесса, детектирование спектральных составляющих, интегрирование амплитудной огибающей и обнаружение сигнала при сравнении ее с порогом. Аналогичный способ обнаружения эхосигнала изложен в книге B.C. Бурдик "Анализ гидроакустических систем". Судостроение 1988 г. стр. 347 и содержит многоканальную по частоте фильтрацию, детектирование, выделение огибающей и сравнение с порогом.
Известен способ обнаружения эхосигнала, рассмотренный в книге Л. Рабинер, Б. Гоулд «Теория и применение цифровой обработки сигналов», Мир, Москва, 1978 г. Способ содержит излучение зондирующего сигнала длительностью Т на известной частоте; прием эхосигнала; дискретизацию входного сигнала, набор входных дискретизированных отсчетов длительностью Т; определение энергетического спектра с помощью быстрого преобразования Фурье (БПФ), сдвиг набора входного сигнала по времени, многократное повторение процедуры набора сдвинутых во времени входных дискретизированных отсчетов длительностью Т и определение энергетического спектра, выбор набора с максимальной энергией сигнала, принятие решение об обнаружении по набору с максимальной энергией сигнала.
Недостатком этих способов является то, что они используют тональный сигнал большой длительности и на выходе определяется спектр эхосигнала, по которому можно определить скорость сближения, но нельзя определить протяженность эхосигнала, что является одним из основных классификационных признаков.
Известны способы обнаружения и измерения параметров эхосигналов от объектов с использованием, так называемых, сложных сигналов, при обработке которых на выходе формируется корреляционная функция эхосигнала и излученного зондирующего сигнала. Эти способы нашли применение в радиолокации и гидроакустике (Р. Бенжамин. Анализ радио и гидролокационных сигналов Воениздат М. 1969). Основные свойства этих сигналов определяются видом внутренней модуляции, которая определяет вид функции неопределенности. Для задач классификации в гидролокации наибольший интерес представляют псевдошумовые сигналы, которые имеют кнопочную функцию неопределенности, обеспечивающие хорошее разрешение по времени и по скорости. (В.А. Зарайский, A.M. Тюрин «Теория гидролокации» изд. ВМАОЛУ, Л. 1975 стр. 242). Как правило, обработка таких сигналов производится с использованием многоканальных корреляторов (там же стр. 255) или многоканальных согласованных фильтров (там же на стр. 333). Если гидролокатор неподвижен и объект локации неподвижен, то корреляция производится между излученным сигналом и принятым эхосигналом. Однако, такая ситуация практически никогда не встречается, и за счет собственного движения и движения цели происходит смещение спектра отраженного сигнала в соответствии с эффектом Доплера (там же стр. 200), в результате чего спектры не совпадают и не образуется свернутая корреляционная функция. Именно по этому, при приеме используют многоканальную обработку по частоте, где каждый канал соответствует определенной скорости цели.
Наиболее близким аналогом предлагаемого способа по количеству общих признаков является способ обработки сложного сигнала, приведенный в книге (В.А. Зарайский, A.M. Тюрин «Теория гидролокации» изд. ВМАОЛУ, Л. 1975 стр. 255).
Способ обработки сложного сигнала содержит следующие операции: излучение зондирующего сложного сигнала, формирования М-опорных сигналов, центральная частота которых сдвинута по частоте относительно излученного сигнала на величину К, прием эхосигнала, определение М корреляционных функций между эхосигналом и каждым из М-опорных сигналов, измерение амплитуды корреляционных функций, выбор корреляционной функции с максимальной амплитудой, определение временного положения максимума корреляционной функции для определения дистанции, определение номера опорного сигнала для определения скорости, отображение результата на индикаторе.
Недостатком этого способа является то, что формируется сложный сигнал одного вида, который может быть принят любым приемником, установленным на облучаемом объекте и переизлучен с искажениями структуры принятого сигнала. Принятый гидролокатором сигнал в этом случае, будет обработан согласованным фильтром и отнесен к реальному отраженному сигналу от реального объекта, что не будет соответствовать действительности, при этом объект обнаружения будет скрыт за ложными сигналами.
Задачей настоящего изобретения является обеспечение достоверности определения реального сигнала от реального объекта, при воздействии преднамеренных помех.
Технический результат заключается в обеспечении исключения возникновения ложных сигналов, от переизлучения зондирующего сигнала любым преднамеренным источником.
Для решения поставленной задачи в способ содержащий излучение зондирующего сложного сигнала, формирование М-опорных сигналов, в полосе обработки от Fмакс до Fмин, центральная частота которых сдвинута по частоте относительно друг друга на величину К, прием эхосигнала, определение М корреляционных функций между эхосигналом и каждым из М-опорных сигналов, измерение амплитуды корреляционных функций, выбор корреляционной функции с максимальной амплитудой, определение временного положения максимума корреляционной функции для определения дистанции до объекта, определение номера опорного сигнала для определения скорости объекта, отображение результата на индикаторе, введены новые признаки, а именно: временную реализацию излучаемого сигнала изменяют на каждой новой посылке, для чего на каждой новой посылке измеряют временную реализацию входной помехи, определяют ее спектр в полосе сигнала от Fмакс до Fмин, определяют временную функцию выбранного спектра, определяют коэффициент корреляции временной реализации предыдущего излученного сигнала и выбранной временной реализации помехи, измеренной по последующей посылке, и если коэффициент корреляции меньше 0,3 принимают решение, что временные реализации не коррелированы и излучают последнюю измеренную временную реализацию помехи, и по эхосигналу от этой посылки определяют дистанцию до объекта и скорость объекта.
Наилучший результат достигается, если выбирают все выбросы корреляционной функции и определяют ее среднее значение в качестве Апор, определяют корреляционную функцию с максимальной амплитудой Амакс, проверяют условие Амакс>2Апор, и если оно соблюдается, принимают решение о наличии сигнала от объекта.
Для того, чтобы избежать ошибки при обнаружении, определяют временное положение максимума корреляционной функции для определения дистанции, определяют номер опорного сигнала для определения скорости Vкан, определяют радиальную скорость Vрад объекта по величине изменения дистанции за время между двумя последующими излучениями различных псевдошумовых сигналов, сравнивают радиальные скорости, измеренные по изменению дистанции и по номеру канала опорной частоты, принимают решение об идентификации объекта при равенстве измеренных скоростей Vкон=Vрад, и предоставляют результат идентификации на систему отображения совместно с измеренными параметрами.
Поясним существо предлагаемого технического решения. Известно, что при работе гидролокатора в реальных условиях могут приниматься не только эхосигналы, отраженные от объектов, но и сигналы, которые принимаются морскими животными и переизлучаются в случайные промежутки времени. (У. Таволга «Морская биоакустика» Л. Судостроение 1969 г. стр. 330). Кроме того, имеются так называемые, средства гидроакустического противодействия, задачами которого является создание ответной помехи, в результате многократного переизлучения принятых сигналов гидролокатора. (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» Санкт-Петербург «Наука» 2004 г. стр. 346). И в том и в другом случае на вход гидролокатора поступают сигналы похожие на излученный гидролокатором сигнал. Следует иметь в виду, что такой сигнал поступает только в том случае, если он был излучен гидролокатором и принят гидролокатором за время обработки информации на установленной шкале дистанции. Как правило, все гидролокаторы имеют стандартный набор сигналов, который не изменяется за время работы. Поэтому, при работе случайные имитируемые сигналы могут поступать на вход приемного устройства в любое время включенного состояния гидролокатора и обрабатываться как реальные эхосигналы от цели. Ситуация существенно изменится, если гидролокатор на каждой посылке будет изменять характеристики излучаемых сигналов. К таким сигналам относятся псевдошумовые сложные сигналы, которые имеют случайный спектр, и при их последовательном излучении корреляция между сигналами последовательных излучений будет отсутствовать. Такие сигналы можно сформировать из случайной последовательности чисел или из реализаций шумового процесса, действующего на входе приемного устройства системы цифровой обработки. Приемные тракты гидролокаторов при обработке этих сигналов разрабатываются с учетом изменения частоты эхосигнала при движении цели. Как правило, такой диапазон изменения частоты не очень широк по сравнению с частотой излучения. Измеряется и запоминается любая временная реализация шумового входного процесса. После измерения выбранная временная реализация подается на анализатор спектра, где определяется ее спектр. Этот спектр существенно шире, чем спектр сигнала излучения, поэтому относительно центральной частоты спектра выбираются спектральные отсчеты равные спектру зондирующего сигнала от Fмакс до Fмин и с помощью «обратного преобразования Фурье» формируется временная реализация псевдошумового сигнала, которая используется для излучения. Поскольку шумовой процесс на входе приемного устройства является событием случайным, то все формируемые из этих процессов сигналы будут независимы: Это относится, прежде всего, к тому случаю, когда на входе действует случайный шумовой процесс, но в гидролокации имеет место донная и поверхностная реверберация, которая может воздействовать на вход приемного устройства и после окончания цикла излучения - прием. Это событие может привести к зависимости последовательных временных реализаций, для чего имеет смысл проверить, насколько временная реализация предыдущего процесса отличается от временной реализации предполагаемого излучения. Определяется коэффициент корреляции между излученной временной реализацией и предполагаемой временной реализацией. Критерием независимости является коэффициент корреляции меньше 0,3, что выбрано из результатов экспериментальных данных. В дальнейшем оценку дистанции и скорости можно использовать для идентификации отраженных сигналов, полученных на последовательных циклах излучения - прием. Обработка принятых эхосигналов не отличается от прототипа и содержит формирование М - опорных сигналов и многоканальную взаимно корреляционную обработку принятых эхосигналов с новыми М-опорными сигналами. Результатом этой обработки является определение дистанции, определение номера опорного сигнала для определения скорости. За время между посылками взаимное положение гидролокатора и объекта может измениться, а также в районе работы могут появиться другие объекты. Поэтому необходимо провести идентификацию полученных эхосигналов в соседних циклах излучения прием с использованием различных зондирующих сигналов. Для этой цели используются оценки дистанции и скорости, полученные при последовательных измерениях. За известное время между излучениями определяется радиальная скорость или скорость сближения, как отношение разности дистанций ко времени между посылками. Эта оценка радиальной скорости должна быть равна оценке скорости, полученной по результатам взаимно-корреляционной обработки по номеру частотного канала из М - опорных частот. Проведенная таким образом идентификация позволяет определять эхосигналы, полученные от одного объекта с использованием разных зондирующих сигналов.
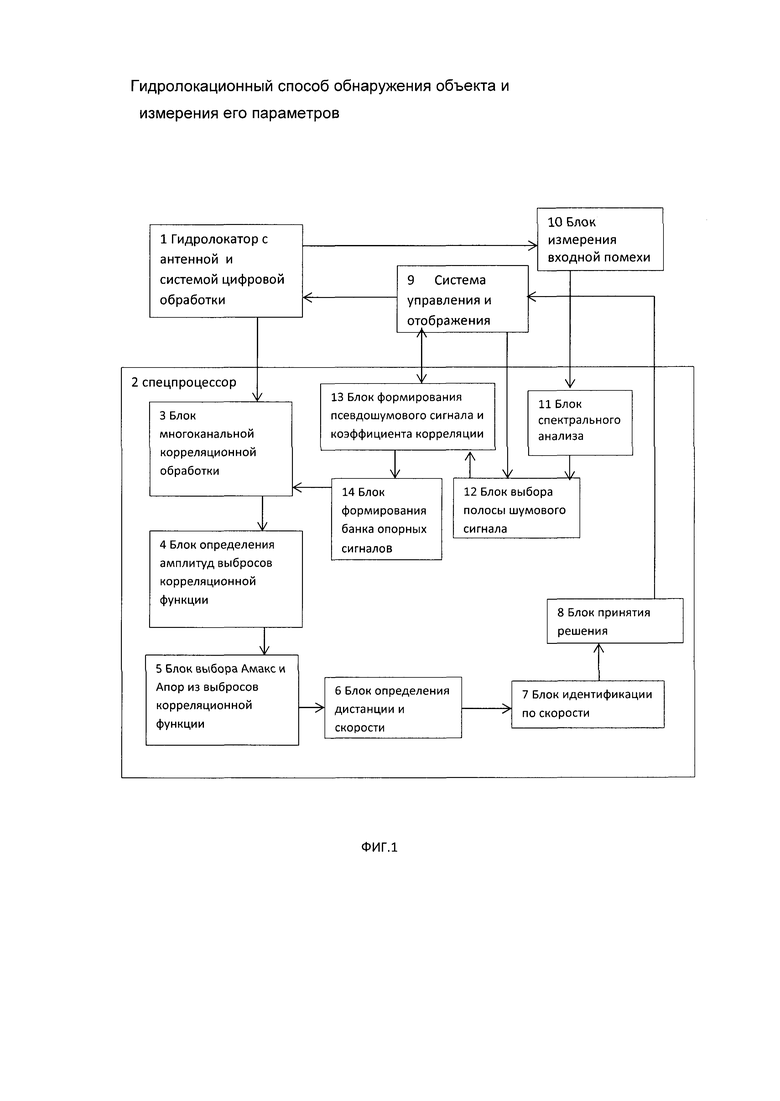
Блок схема устройства, реализующая предлагаемый способ, представлена на фиг. 1.
На фиг. 1 представлен гидролокатор 1 с антенной и системой цифровой обработки, первый выход которого последовательно соединен со спецпроцессором 2, в состав которого входят последовательно соединенные блок 3 многоканальной корреляционной обработки, блок 4 определения амплитуд выбросов корреляционной функции, блок 5 выбора Амакс и Апор из выбросов корреляционной функции, блок 6 определения дистанции и скорости, блок 7 идентификации по скорости, блок 8 принятия решения, выход которого через первый вход система 9 управления и отображения соединен с гидролокатором 1. Второй выход гидролокатора 1 через последовательно соединенные блок 10 измерения входной помехи, блок 11 спектрального анализа, блок 12 выбора полосы шумового сигнала, через первый вход блок 13 формирования псевдошумового сигнала соединен с блоком 14 формирования банка опорных сигналов, выход которого соединен со вторым входом блока 3. Второй выход блока 13 соединен двусторонней связью со вторым входом блока управления и отображения.
Измерение взаимно-корреляционной функции и определение коэффициента корреляции между процессами - это известные операции, которые характеризуют степень схожести двух сигналов, и достаточно подробно используются в современной технике. (Дж. Бендат, А. Пирсол «Измерение и анализ случайных процессов» Мир М 1971 стр. 44-47, стр. 196). Процедуры обработки псевдошумовых сигналов достаточно подробно изложены в книге Я.Д. Ширман «Разрешения и сжатие сигналов» М. Сов. радио 1974 г, а так же в книге Г.И. Тузов «Статистическая теория приема сложных сигналов» М Сов. Радио 1977 г. Гидролокатор является известным устройством, который давно используется в отечественном приборостроении. (А.Н. Яковлев, Г.П. Каблов. «Гидролокаторы ближнего действия». Л. Судостроение. 1983.). В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые преобразуют акустический сигнал в цифровой вид и производят в цифровом виде формирование характеристик направленности, многоканальную обработку и обнаружение сигнала, а также измерение амплитуд эхосигналов и временных отсчетов, а так же принятие решения о цели. Эти вопросы достаточно подробно рассмотрены в литературе. (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» Санкт-Петербург. «Наука.» 2004 г. Стр. 95-99, стр. 237-255). Использование цифровой техники позволяет оперативно обрабатывать информацию любой сложности на основе разработанных алгоритмов. Эти вопросы достаточно подробно рассмотрены в книге «Применение цифровой обработки сигналов» п/р Оппенгейма М. Мир. 1980 г. В процессоре реализуются все блоки предлагаемого устройства такие, как спектральная обработка на основе БПФ, корреляционная обработка, блоки памяти, процедуры сравнения, накопления, принятия решения и корректировки. Практически все указанные процедуры могут быть реализованы на современных компьютерах и ноутбуках, в которых реализованы вычислительные программы Matlab, Matcad и др. (А.Б. Сергиенко Цифровая обработка сигналов СПб. «БХВ - Петербург» 2011 г.). При использовании цифровой техники в качестве спектрального анализа применяют процедуры быстрого преобразования Фурье (БПФ), которые обеспечивают выделение и измерение энергетического спектра шумового электрического процесса по всем пространственным каналам вертикального статического веера характеристик направленности. ("Применение цифровой обработки сигналов", п\р Оппенгейма, изд. Мир М. 1980 г. стр. 296.). Там же на стр. 389-436 рассмотрены принципы цифрового преобразования и обработки сигналов. Описание способа целесообразно совместить с описанием работы устройства (фиг. 1) При включении с помощью блока 9 управления и отображения гидролокатора, включается приемный тракт и на выходе системы цифровой обработки приемного тракта отображается входная помеха в виде временной реализации в полосе приемного тракта. До излучения зондирующего сигнала на входе будет действовать нормальный стационарный некоррелированный шум. Этот шум будет поступать на вход блока 10 измерения входной помехи, где будут запоминаться временные последовательные реализации шумового процесса. Число этих реализаций может быть достаточно большим, что бы обеспечить работу в реальных условиях. Временные реализации подаются последовательно на блок 11 спектрального анализа, на выходе которого формируется спектр входного шума в полосе приемного тракта. Спектральный анализ является известной операцией, которая выполняется с использованием процедуры «быстрого преобразования Фурье». Для работы гидролокатора используется псевдошумовые сигналы, полоса которых значительно меньше, чем полоса входного шумового сигнала. Система управления и отображения задает параметры зондирующего сигнала, такие как длительность сигнала излучения и ширина полосы частот. В блоке 12 выбираются частотные составляющие в заданной полосе, которые передаются в блок 13 формирования псевдошумового сигнала и анализа случайности. По полученному из блока 12 спектру в блоке 13 производится «обратное преобразование Фурье», в результате которого создается временная реализация с выбранной полосой и длительностью, задаваемой из блока 9. Эта временная реализация через блок 9 передается в гидролокатор для излучения и эта же реализация поступает в блок 14 формирования банка опорных частот, где формируются копии излученного сигнала,, но сдвинутые друг относительно друга по частоте в интервале заданных скоростей движения обнаруженных объектов. Анализ случайности производится в блоке 13 по значению коэффициента корреляции между последовательными сформированными реализациями зондирующего сигнала. При коэффициенте корреляции больше 0,3 излучение очередного подготовленного сигнала не производится. После излучения зондирующего сигнала гидролокатор 1 переходит в режим приема отраженных эхосигналов, которые поступают в спецпроцессор 2 на вход блока 3 многоканальной корреляционной обработки. На второй вход блока 3 подаются опорные сигналы из блока 14, и в блоке 3 производится последовательная взаимно корреляционная обработка принятой временной реализации с набором опорных сигналов. Таким образом, на выходе блока 3 образуется массив корреляционных функций принятых временных реализаций с опорными сигналами. Этот набор корреляционных функций передается в блок 4 определения амплитуд выбросов корреляционных функций, где производится измерение их амплитуд. После чего в блоке 5 производится определение Апор как среднего значения из всего набора амплитуд. Известно, что максимальная амплитуда корреляционной функции для сигнала с известным опорным сигналом всегда больше среднего значения выбросов этой корреляционной функции с неизвестным опорным сигналом. Поэтому условием обнаружения эхосигнала является превышение максимальной амплитуды выброса с Амакс>2Апор. Для этой амплитуды определяется время Т и номер канала опорной частоты, которая соответствует скорости движения обнаруженного объекта и передается в блок 6 определения дистанции по времени задержки и скорости по номеру опорного канала. По первой посылке значения дистанции и скорости передается в блок 9 управления и отображения через блоки 7 и 8 без дополнительной обработки. По второй посылке оценки дистанции и скорости будут получены для другого зондирующего сигнала, поэтому необходимо полученные оценки идентифицировать между собой. В качестве признака идентификации предлагается использовать оценку скорости, полученную по номеру опорного канала Vк и оценку скорости, полученную как Vp=(Д2-Д1)\T. Если Vк=Vp, то это означает, что оценки получены по одной и той же цели, для которой дистанции Д2 соответствует излученному сигналу на данный момент измерения, а Д1, излученному на предыдущий момент измерения. Идентификация производится в блоке 7 и результат передается через блок 8 в блок 9. Поскольку для реальной цели дистанция и скорость являются не случайными, а детерминированными оценками, то значение скорости, полученные по номеру опорного канала и по изменению дистанций, будут совпадать при последовательных измерениях. Повышение достоверности объясняется тем, что имитированные сигналы будут соответствовать предыдущей посылке, и они не будут оптимально обрабатываться для излученного зондирующего сигнала на последующей посылке.
Таким образом, используя последовательную процедуру формирования независимых псевдошумовых сложных сигналов, корреляционную обработку поступающих временных реализаций, определения корреляционных функций с использованием многоканальной корреляционной обработки для независимых последовательных зондирующих сигналов, можно повысить достоверность работы гидролокатора в условиях применения преднамеренных помех.
Изобретение относится к области гидроакустики и может быть использовано для построения систем автоматического обнаружения эхосигналов, принятых гидролокатором на фоне шумовой и реверберационной помехи и измерения параметров объекта при использовании псевдошумовых сигналов в условиях применения преднамеренных помех. Гидролокационный способ обнаружения объекта и измерения его параметров содержит излучение зондирующего сложного сигнала, формирование М-опорных сигналов, в полосе обработки от Fмакс до Fмин, центральная частота которых сдвинута по частоте относительно друг друга на величину К, прием эхосигнала, определение М корреляционных функций между эхосигналом и каждым из М-опорных сигналов, измерение амплитуды корреляционных функций, выбор корреляционной функции с максимальной амплитудой, определение временного положения максимума корреляционной функции для определения дистанции до объекта, определение номера опорного сигнала для определения скорости объекта, отображение результата на индикаторе, временную реализацию излучаемого сигнала изменяют на каждой новой посылке, для чего на каждой новой посылке измеряют временную реализацию входной помехи, определяют ее спектр в полосе сигнала от Fмакс до Fмин, определяют временную функцию выбранного спектра, определяют временное положение максимума корреляционной функции для определения дистанции, определяют номер опорного сигнала для определения скорости Vкан, определяют радиальную скорость Vрад объекта по величине изменения дистанции за время между двумя последующими излучениями различных псевдошумовых сигналов, сравнивают радиальные скорости, измеренные по изменению дистанции и по номеру канала опорной частоты, принимают решение об идентификации объекта при равенстве измеренных скоростей Vкан=Vрад, и предоставляют результат идентификации на систему отображения совместно с измеренными параметрами. 2 з.п. ф-лы, 1 ил.
1. Гидролокационный способ обнаружения объекта и измерения его параметров, содержащий излучение зондирующего сложного сигнала, формирование М-опорных сигналов, в полосе обработки от Fмакс до Fмин, центральная частота которых сдвинута по частоте относительно друг друга на величину К, прием эхосигнала, определение М корреляционных функций между эхосигналом и каждым из М-опорных сигналов, измерение амплитуды корреляционных функций, выбор корреляционной функции с максимальной амплитудой, определение временного положения максимума корреляционной функции для определения дистанции до объекта, определение номера опорного сигнала для определения скорости объекта, отображение результата на индикаторе, отличающийся тем, что временную реализацию излучаемого сигнала изменяют на каждой новой посылке, для чего на каждой новой посылке измеряют временную реализацию входной помехи, определяют ее спектр в полосе сигнала от Fмакс до Fмин, определяют временную функцию выбранного спектра, определяют коэффициент корреляции временной реализации предыдущего излученного сигнала и выбранной временной реализации помехи, измеренной по последующей посылке, и если коэффициент корреляции меньше 0,3, принимают решение, что временные реализации не коррелированы и излучают последнюю измеренную временную реализацию помехи, и по эхосигналу от этой посылки определяют дистанцию до объекта и скорость объекта.
2. Гидролокационный способ по п.1, отличающийся тем, что выбирают все амплитуды выбросов корреляционной функции и определяют их среднее значение в качестве Апор, определяют корреляционную функцию с максимальной амплитудой Амакс, проверяют условие Амакс>2Апор, и если оно соблюдается, принимают решение о наличии сигнала от объекта.
3. Гидролокационный способ по п. 2, отличающийся тем, что определяют временное положение максимума корреляционной функции для определения дистанции, определяют номер опорного сигнала для определения скорости Vкан, определяют радиальную скорость Vрад объекта по величине изменения дистанции за время между двумя последующими излучениями различных псевдошумовых сигналов, сравнивают радиальные скорости, измеренные по изменению дистанции и по номеру канала опорной частоты, принимают решение об идентификации объекта при равенстве измеренных скоростей Vкан=Vрад и предоставляют результат идентификации на систему отображения совместно с измеренными параметрами.
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА И ИЗМЕРЕНИЯ ЕГО ПАРАМЕТРОВ | 2016 |
|
RU2627977C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2016 |
|
RU2634787C1 |
| СПОСОБ КЛАССИФИКАЦИИ ОБЪЕКТА, ОБНАРУЖЕННОГО ГИДРОЛОКАТОРОМ | 2012 |
|
RU2490664C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529441C1 |
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ, ДВИЖУЩИХСЯ С МАЛОЙ РАДИАЛЬНОЙ СКОРОСТЬЮ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ, И ГИДРОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2002 |
|
RU2242021C2 |
| СПОСОБ ОБРАБОТКИ ГИДРОАКУСТИЧЕСКОГО СИГНАЛА ШУМОИЗЛУЧЕНИЯ ОБЪЕКТА | 2014 |
|
RU2555194C1 |
| СПОСОБ ПОЛУЧЕНИЯ ХЛЕБНОГО КВАСА | 2015 |
|
RU2590032C1 |

