Описываемое изобретение относится к способам поражения целей противолодочными ракетами.
На вооружении надводных кораблей и подводных лодок ведущих морских держав состоят баллистические и крылатые противолодочные управляемые ракеты [1, с. 356-361].
Известны баллистические противолодочные ракеты (ПЛР) «Асрок» (США), «Медведка» (Россия), крылатые ПЛР «Милас» (Франция), «Икар» и «Супер Икар» (Великобритания), 85Р и 85РУ (СССР). В качестве боевой части этих ракет используют противолодочные малогабаритные торпеды (МГТ) [2].
Для обеспечения стрельбы ПЛР требуется надежное целеуказание, особенно при стрельбе на большие дистанции. В то же время корабельные гидроакустические средства обнаружения подводных целей имеют сложную конфигурацию зон наблюдения с многочисленными «теневыми» зонами, в зависимости от гидрологии и глубин в районе. Наличие теневых зон создает предпосылки пропуска цели и перелета ПЛР на траектории [1, с. 359].
Указанный недостаток может быть устранен путем выбора варианта крылатой противолодочной ракеты, имеющей настильную траекторию с небольшой маршевой высотой до 10-20 м или оснащения ПЛР средством обнаружения погруженной подводной лодки, например, магнитометром, и устройствами для предотвращения (компенсации) промаха ракеты (перелета) [1, с. 328-336], [3].
Магнитометрические средства обнаружения (авиационные поисковые магнитометры) размещаются на крылатой ПЛР в качестве средства обнаружения погруженной подводной лодки (ПЛ) [3]. Низколетящая крылатая ПЛР, имеющая настильную траекторию с небольшой маршевой высотой порядка 5…10 м (для увеличения глубины поиска цели) [4, с. 107], оснащенная магнитометром, позволяет исключить пропуск ПЛ-цели с глубиной погружения до 500-600 м по траектории (перелет ПЛР) и отделить торпедную боевую часть в точке обнаружения ПЛ. Глубины погружения современных ПЛ не превышают 600 м, что обеспечивает их надежное обнаружение магнитометром, размещенным на крылатой низколетящей ПЛР. Торпедные боевые части ПЛР после приводнения осуществляют циркуляционный поиск ПЛ-цели с помощью акустической аппаратуры самонаведения (АСН). При дальности действия АСН порядка нескольких километров обеспечивается надежное вторичное обнаружение и поражение ПЛ-цели торпедой.
Известен способ применения противолодочной ракеты, оснащенной магнитометром и соответствующими дополнительными устройствами, обеспечивающими обнаружение цели и управление ракетой на траектории, заключающийся в том, что после пуска ракеты ее удерживают на малой маршевой высоте полета, в расчетной точке включают магнитометр и осуществляют поиск цели, с обнаружением цели для обозначения ее места сбрасывают с ракеты маркер или радиогидроакустический буй (РГБ), а также торпеду, если она попадает в область захвата цели ее аппаратурой самонаведения [3]. В случае же непопадания торпеды в эту область разворачивают ракету на обратный курс и сбрасывают торпеду в точку, помеченную маркером или РГБ, осуществляют поиск цели торпедой, обнаруживают ее и выполняют атаку цели путем сближения торпеды на дистанцию срабатывания ее неконтактного взрывателя или до момента столкновения торпеды с корпусом цели, после чего подрывают взрывчатое вещество боевой части торпеды и поражают цель [3].
Недостатком данного способа является то, что ПЛР после обнаружения цели очень быстро может выйти из области захвата цели аппаратурой самонаведения торпеды, особенно при полете с большой (сверхзвуковой) скоростью, и промахнуться мимо цели. Данное обстоятельство обусловлено тем, что при полете ракеты на малой высоте и с большой скоростью для обеспечения торможения торпеды перед ее приводнением необходимо сбрасывать торпеду на траектории набора высоты (маневр кабрирования). Выполнение данного маневра может занять время, за которое ракета удалится от цели на расстояние, превышающее радиус реагирования ее аппаратуры самонаведения. Разворот ракеты и выполнение торпедометания на повторном заходе дает цели дополнительное время и возможность для осуществления противодействия.
Так, например, минимальный радиус разворота ракеты rmin определяется формулой [5, с. 138]:
где V - скорость ракеты, м/с; g - ускорение силы тяжести; np max - максимально возможная перегрузка ракеты, являющаяся ее динамической характеристикой маневренности.
С учетом известных формул по расчету длины окружности и времени движения по ней: L=2πrmin и t=L/V, время полного разворота ракеты при выполнений циркуляции найдется по формуле:
При скорости ракеты V=500 м/с и np max = 10 минимальный радиус разворота ракеты составит величину rmin=2548 м, длина окружности, описываемой ракетой для второго захода в точку местонахождения обнаруженной ранее цели L=16012 м, время выполнения ракетой полной циркуляции t=32 с. За 32 с цель удалится от своего прежнего местонахождения на достаточно большое расстояние и получит дополнительную возможность оказывать противодействие атакующей ее ракете.
Целью изобретения является разработка способа поражения подводной лодки противолодочной крылатой ракетой, имеющей высокую скорость и малую высоту полета, который обеспечивал бы атаку цели с первого захода без циркуляции ракеты.
Поставленная цель достигается благодаря тому, что, в отличие от способа-прототипа, после обнаружения цели магнитометром, фиксируют координаты цели и вводят их в систему управления торпеды, в счетно-решающем устройстве рассчитывают координаты точки приводнения торпеды и маршрут ее движения к цели после приводнения, управляют движением торпеды в точку местонахождения обнаруженной цели.
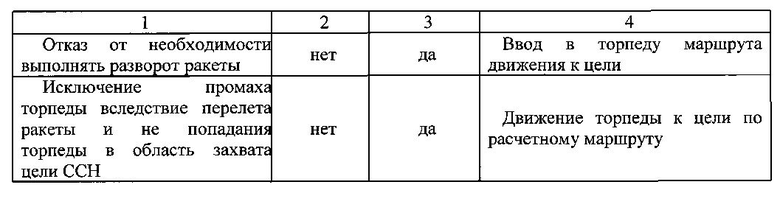
О соответствии предложенного технического решения критерию «существенные отличия» свидетельствуют сведения, приведенные в таблице 1.
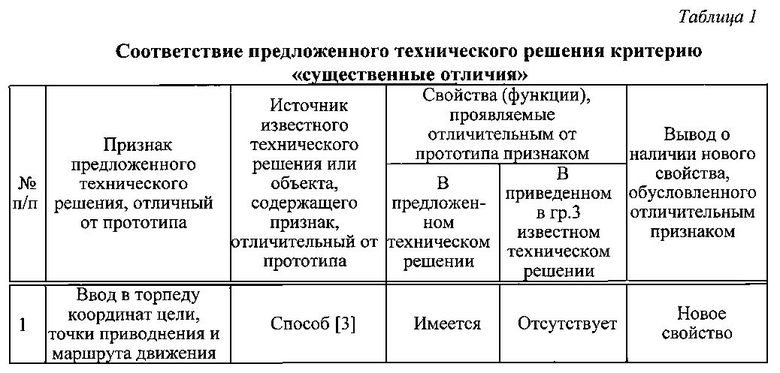
Предложенное техническое решение соответствует критерию «существенные отличия», так как ни один из отличительных признаков в известном устройстве не обнаружен.
Достижение положительного эффекта при осуществлении предложенного устройства подтверждается сведениями, приведенными в таблице 2.
Предлагаемый способ поражения цели противолодочной крылатой ракетой позволит за счет использования магнитометрических средств обнаружения исключить перелет ракеты мимо цели в случаях попадания подводной лодки противника в затененные области действия гидроакустических средств обнаружения и целеуказания, а также отказаться от необходимости разворота ракеты на обратный курс для исключения приводнения торпеды вне области захвата цели ее системой самонаведения при полете ракеты на малых высотах и больших скоростях.
Источники информации
1. Кузин В.П., Никольский В.И. Военно-морской флот СССР 1945-1991. - СПб: Историческое морское общество, 1996. - 614 с., ил.
2. Новиков А.В. и др. Реактивные системы морского подводного оружия. // Морская радиоэлектроника, №1, 2, 2009 г., с. 60-62.
3. Поленин В.И. и др. Противолодочная крылатая ракета и способ ее применения. Заявка на изобретение №2014104394 от 7.02.2014.
4. Вооружение и военно-морская техника России. - М.: ООО ИД «Военный парад», 2009. - 186 с.
5. Новиков А.В. Противолодочное ракетное оружие. Теоретические основы. - СПб.: ВМИ, 2007. - 438 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТИВОЛОДОЧНАЯ КРЫЛАТАЯ РАКЕТА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2014 |
|
RU2546726C1 |
| УНИВЕРСАЛЬНАЯ ПО ЦЕЛЯМ КРЫЛАТАЯ РАКЕТА И СПОСОБЫ ПОРАЖЕНИЯ ЦЕЛЕЙ | 2015 |
|
RU2622051C2 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ | 2019 |
|
RU2735358C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ (ВАРИАНТЫ) | 2011 |
|
RU2513366C2 |
| СПОСОБ ПОРАЖЕНИЯ НАДВОДНОГО КОРАБЛЯ УНИВЕРСАЛЬНОЙ КРЫЛАТОЙ РАКЕТОЙ С ТОРПЕДНОЙ БОЕВОЙ ЧАСТЬЮ | 2008 |
|
RU2382326C2 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВОДНОЙ ЛОДКИ | 2018 |
|
RU2711409C2 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ ТОРПЕДАМИ | 2019 |
|
RU2733734C2 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2019 |
|
RU2730749C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ | 2017 |
|
RU2692332C2 |
| ПРОТИВОКОРАБЕЛЬНЫЙ РАКЕТНЫЙ КОМПЛЕКС С ЛЕТАЮЩИМ РОБОТОМ-НОСИТЕЛЕМ РАКЕТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2706295C2 |
Изобретение относится к боеприпасам, а именно к способам поражения цели противолодочной крылатой ракетой. Способ поражения цели противолодочной крылатой ракетой заключается в том, что обнаруживают подводную лодку противника, выдают целеуказание на носитель противолодочной ракеты, запускают ракету из пусковой установки, управляют ракетой на стартовом и маршевом участках траектории, включают магнитометр и осуществляют поиск цели на маршруте полета, обнаруживают магнитометром цель, сбрасывают торпеду, передают сигнал об обнаруженной цели по действующей линии связи на другую ракету залпа и стреляющий корабль, после сброса торпеды осуществляют поиск цели, обнаруживают ее аппаратурой самонаведения торпеды и выполняют атаку цели. После обнаружения цели магнитометром, фиксируют координаты цели и вводят их в систему управления торпеды, в счетно-решающем устройстве рассчитывают координаты точки приводнения торпеды и маршрут ее движения к цели после приводнения управляют движением торпеды в точку местонахождения обнаруженной цели. Достигается повышение эффективности способа поражения подводной лодки противолодочной крылатой ракетой. 2 табл.
Способ поражения цели противолодочной крылатой ракетой, при котором обнаруживают подводную лодку противника позиционными, корабельными или выносными средствами обнаружения, выдают целеуказание (координаты цели или пеленг на цель) на носитель противолодочной ракеты, выполняют предстартовую подготовку и проверку противолодочной ракеты, вводят в бортовую систему управления ракеты полетное задание, запускают ракету из пусковой установки, управляют ракетой на стартовом и маршевом участках траектории, удерживают маршевую малую высоту полета ракеты для увеличения глубины поиска цели, в расчетной точке или по команде бортовой системы управления включают магнитометр и осуществляют поиск цели на маршруте полета, обнаруживают магнитометром цель или устройствами обнаружения ракеты средства обозначения места цели, сбрасывают торпеду и/или средства обозначения места цели (маркер или радиогидроакустический буй), передают сигнал об обнаруженной цели по действующей линии связи на другую ракету залпа и стреляющий корабль (командный пункт), после сброса торпеды осуществляют поиск цели, обнаруживают ее аппаратурой самонаведения торпеды и выполняют атаку цели, отличающийся тем, что после обнаружения цели магнитометром фиксируют координаты цели и вводят их в систему управления торпеды, в счетно-решающем устройстве рассчитывают координаты точки приводнения торпеды и маршрут ее движения к цели после приводнения, управляют движением торпеды в точку местонахождения обнаруженной цели.
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ (ВАРИАНТЫ) | 2011 |
|
RU2513366C2 |
| СПОСОБ СТРЕЛЬБЫ С ПАЛУБНОЙ ПУСКОВОЙ УСТАНОВКИ ПРОТИВОЛОДОЧНОГО РАКЕТНОГО КОМПЛЕКСА | 1995 |
|
RU2093783C1 |
| EP 1895264 B1, 24.12.2008. | |||

