УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к способу для выполнения диагностики приводного механизма, содержащего катушку и устройство управления энергоснабжением катушки, в частности приводного механизма выключателя электрической цепи. Оно также относится к устройству для выполнения диагностики источника питания катушки приводного механизма, позволяющему способу диагностики быть выполненным. Оно также относится к приводному механизму, содержащему катушку и по меньшей мере одно такое устройство диагностики. Наконец, оно относится к компьютерной программе, содержащей средства компьютерного программного кода, подходящего для выполнения этапов способа диагностики.
УРОВЕНЬ ТЕХНИКИ
Приводные механизмы, сконструированные для управления открыванием и закрыванием выключателей цепи, известны и в настоящее время формируются встроенными электронными схемами управления и связаны с электромагнитной катушкой. Роль этих электронных схем сделала возможным добавление функциональных возможностей, которые в основном сделали возможным уменьшение объема приводного механизма.
Эти приводные механизмы заранее формировались только напрямую питаемым электромагнитом, то есть без электронных схем управления. По этой причине в некоторых чувствительных установках было возможно проверить непрерывность катушечной обмотки, подавая слабый ток на катушку. Таким образом, было возможно иметь индикацию состояния или доступности приводного механизма. Однако это средство не давало возможности определить, была ли намотка приводного механизма короткозамкнутой или нет.
Это средство отслеживания не пригодно для использования на приводных механизмах, управляемых электронными схемами - оно не дает никакой информации о состоянии приводного механизма, но лишь дает информацию о его наличии.
Однако в некоторых чувствительных установках существует требование, чтобы знать состояние приводного механизма, в частности:
- состояние катушки или катушек (действующая, или открытая, или короткозамкнутая), и/или
- состояние электронных схем управления катушки или катушек.
Следовательно, появляется интерес проверки катушки, снабженной электронными схемами управления (используя, например, технологию широтно-импульсной модуляции (ШИМ, PWM), посредством которой управляющее напряжение может быть сопоставлено с широким диапазоном энергоснабжения или операцией пускового удержания, которая уменьшает энергию, рассеиваемую при непрерывном удержании). Питаемая катушка не «видима» напрямую через ее управляющие и питающие провода - обычно имеется диодный мост и открытый транзистор, когда катушкой не управляют. Ток, питающий приводной механизм, таким образом, не обязательно питает катушку.
Следовательно, целью настоящего изобретения является проверить, что катушечная обмотка не разорвана или короткозамкнута и что электронные схемы не повреждены.
Устройства, делающие возможной диагностику, которая должна быть выполнена, известны из предшествующего уровня техники, касающегося различных систем, таких как системы безопасности автомобиля (DE 3920693), или такие, как системы зажигания двигателя автомобиля (US 2009/139505). Устройство для диагностики функционирования электронной схемы управления электромагнитного клапана также известны из документа JP 2009/174599.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью изобретения является предоставить способ диагностики, делающий возможным исправление проблем, приведенных выше, и улучшающий известные способы предшествующего уровня техники. В частности, изобретение предлагает способ диагностики, который является простым, экономичным, эффективным, и делает возможным проверку того, что катушечная обмотка не разорвана или короткозамкнута, и/или что электронные схемы не повреждены.
Способ диагностики согласно изобретению приводного механизма, содержащего катушку и устройство управления энергоснабжением катушки, содержит следующие этапы:
- управление энергоснабжением приводного механизма посредством устройства диагностики,
- управление энергоснабжением катушки посредством устройства управления,
- отслеживание на уровне устройства диагностики электрической характеристики электрического сигнала, в частности электрического сигнала, питающего приводной механизм, и
- вывод диагностики приводного механизма, используя результаты этапа отслеживания.
Предпочтительно, этап управления энергоснабжением приводного механизма содержит активацию средства управления энергоснабжением приводного механизма.
Предпочтительно, этап управления энергоснабжением катушки содержит активацию средства управления энергоснабжением катушки.
Преимущественно, этап отслеживания на уровне диагностики электрической характеристики электрического сигнала содержит определение силы тока, протекающего в линии энергоснабжения приводного механизма, или определение напряжения на выводах резистивного элемента, через который протекает ток, протекающий в линии энергоснабжения приводного механизма.
Предпочтительно, этап вывода диагностики приводного механизма содержит основанный на времени анализ изменений электрической характеристики.
Устройство диагностики согласно изобретению энергоснабжения катушки приводного механизма содержит средства аппаратного обеспечения и/или программного обеспечения для реализации этапов способа диагностики, как определено выше.
Предпочтительно, средства аппаратного обеспечения и/или программного обеспечения содержат средство управления энергоснабжением приводного механизма.
Преимущественно, средства аппаратного обеспечения и/или программного обеспечения содержат средство для отслеживания электрической характеристики электрического сигнала, упомянутое средство, являющееся средством для определения силы тока, протекающего в линии энергоснабжения приводного механизма, или средством для определения напряжения на выводах резистивного элемента, через который протекает ток, протекающий в линии энергоснабжения приводного механизма.
Предпочтительно, средства аппаратного обеспечения и/или программного обеспечения содержат средство для вывода диагностики приводного механизма, упомянутое средство, являющееся средством для основанного на времени анализа изменений электрической характеристики электрического сигнала.
Предпочтительно, средства аппаратного обеспечения и/или программного обеспечения содержат средство управления энергоснабжением катушки.
Преимущественно, средства аппаратного обеспечения и/или программного обеспечения содержат средство для определения силы тока, протекающего в катушке, и средство для анализа силы тока, протекающего в катушке.
Преимущественно, средства аппаратного обеспечения и/или программного обеспечения содержат средство для определения напряжения питания катушки, и средство для анализа напряжения энергоснабжения катушки.
Приводной механизм согласно изобретению, содержащий катушку и по меньшей мере одно устройство управления, содержит устройство диагностики, как определено выше.
Предпочтительно, устройство диагностики состоит из двух отдельных устройств: первого устройства диагностики и второго устройства управления.
Компьютерная программа согласно изобретению содержит средства компьютерного программного кода, подходящие для выполнения этапов способа, как описано выше, когда программа выполняется на компьютере.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи представляют для целей примера вариант осуществления устройства диагностики согласно изобретению, два варианта осуществления устройства управления согласно изобретению и вариант выполнения способа диагностики согласно изобретению.
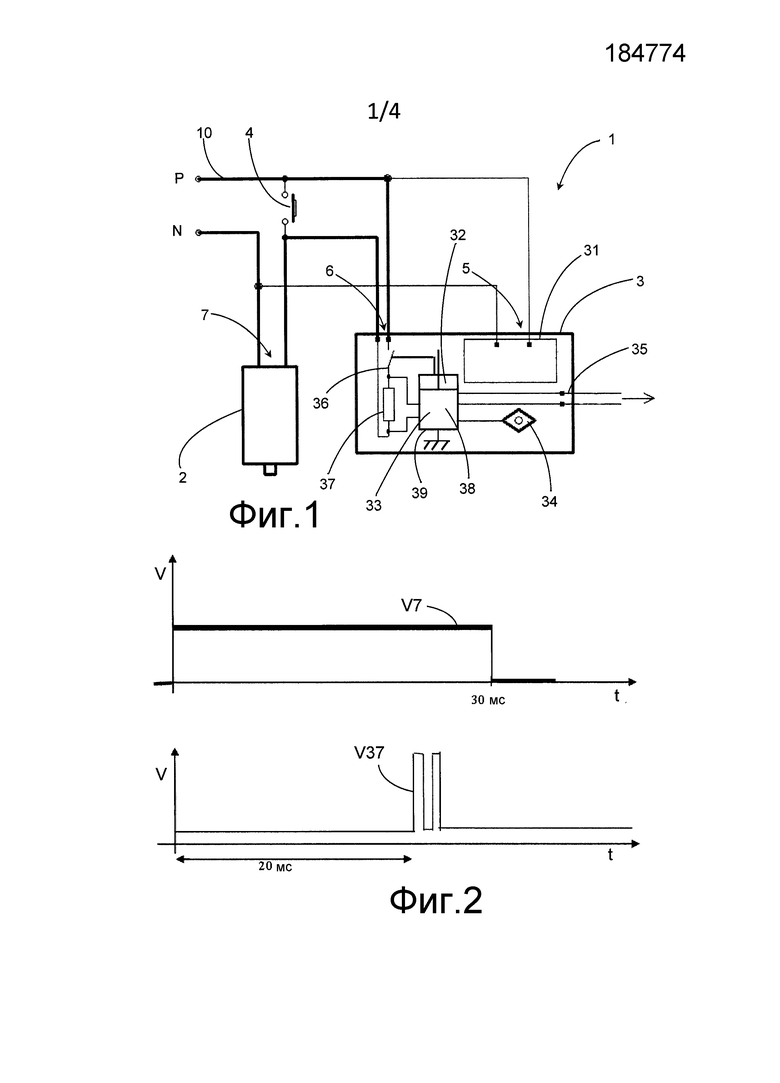
Фигура 1 - диаграмма системы, содержащей вариант осуществления устройства диагностики согласно изобретению.
Фигура 2 - основанная на времени диаграмма тестовых сигналов.
Фигура 3 - диаграмма первого варианта осуществления приводного механизма согласно изобретению.
Фигура 4 - диаграмма второго варианта осуществления приводного механизма согласно изобретению.
Фигура 5 - диаграмма варианта второго варианта осуществления устройства управления согласно изобретению.
Фигура 6 - блок-схема последовательности операций варианта выполнения способа диагностики согласно изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Вариант осуществления системы 1 согласно изобретению описан ниже со ссылкой на фигуру 1. Система главным образом содержит приводной механизм 2, в частности приводной механизм выключателя электрической цепи, устройство 3 диагностики состояния приводного механизма и переключатель 4 активации приводного механизма 2, такой как кнопка.
Например, приводной механизм 2 подключен последовательно с переключателем 4 в электрическую линию 10 между линейным выводом P и нейтральным выводом N электроэнергетической системы, такой как коммерческая электроэнергетическая система. Энергоснабжение, а значит и активация приводного механизма, следовательно, управляется переключателем 4. Приведение в действие переключателя фактически приводит к тому, что напряжение электроэнергетической системы напрямую прикладывается к выводам 7 приводного механизма.
Устройство 3 диагностики дополнительно подключено посредством выводов 5 источника питания напрямую к линейному выводу P и нейтральному выводу N энергетической системы. Устройство диагностики дополнительно подключено посредством выводов 6 к выводам переключателя 4, то есть параллельно переключателю. Следовательно, чтобы выполнить способ диагностики, устройство диагностики включает энергоснабжение приводного механизма посредством короткого замыкания переключателя.
В качестве альтернативы, устройство диагностики могло бы питать приводной механизм посредством прикладывания напряжения, генерируемого устройством диагностики, напрямую между выводами 7 приводного механизма.
Энергоснабжение приводного механизма через устройство диагностики выполняется периодически, например один раз в час, в частности один раз в час в течение 30 мс. Когда выполняется это энергоснабжение, приводной механизм испускает электрический сигнал, который принимается устройством диагностики и который делает возможным определение состояния приводного механизма.
Устройство 3 диагностики предпочтительно содержит источник 31 питания, средства 32, 36 управления энергоснабжением приводного механизма, средства 33, 37 отслеживания электрической характеристики электрического сигнала, питающего привод, и средство 38 для вывода диагностики приводного механизма.
Средства 32, 36 управления энергоснабжением приводного механизма могут содержать первый управляемый переключатель 36, управляемый средством 36 управления, например, включенным в микроконтроллер 39.
Средства 33, 37 отслеживания электрической характеристики электрического сигнала, питающего приводной механизм, могут содержать средства 33, 37 для определения силы тока, протекающего в линии, питающей приводной механизм, или средство 33 для определения напряжения на выводах резистивного элемента 37, через который протекает ток, протекающий в линии, питающей приводной механизм. Средство 33, в частности, может быть включено в микроконтроллер.
Средство 38 для вывода диагностики приводного механизма может содержать средство для основанного на времени анализа изменений электрической характеристики электрического сигнала, питающего приводной механизм, в частности средство для анализа изменений силы тока, поглощенного в приводном механизме во временном окне.
Например, управляемый переключатель и резистивный элемент подключены последовательно в линии, питающей приводной механизм. Они могут быть подключены последовательно между выводами 6.
Преимущественно, устройство диагностики может содержать пользовательский интерфейс, такой как световой индикатор, информирующий пользователя о существовании проблемы, в частности проблемы состояния приводного механизма. В качестве альтернативы или дополнительно, устройство диагностики также может содержать выводы 35, к которым может быть подключено устройство пользовательского интерфейса.
Первый вариант осуществления приводного механизма 2 описан ниже со ссылкой на фигуру 3. Приводной механизм 2 главным образом содержит устройство 22 управления и электромагнит 21.
Электромагнит содержит, например, первую пусковую катушку 211 и вторую удерживающую катушку 212. Катушки, например, подключены последовательно.
Устройство управления главным образом содержит преобразователь 221 для преобразования сигнала энергоснабжения приводного механизма в электрический сигнал, подходящий для питания электромагнита, логический блок 225 обработки, такой как микроконтроллер, источник 223 питания и регулятор 224 напряжения, чтобы питать энергией этот логический блок обработки, средства 225, 226 управления энергоснабжением первой катушки, средства 225, 228 управления энергоснабжением последовательно подключенной группы первой и второй катушки, средство 225, 227 для определения силы тока, протекающего в первой катушке, средства 225, 229 для определения силы тока, протекающего в последовательно подключенной группе первой и второй катушки, средство 225 для анализа сил тока, протекающих в катушках, средство 222 для определения напряжения на катушках и средство для анализа питающего напряжения катушки.
Преобразователь 221, 220 типично содержит схему защиты, фильтр и выпрямляющую схему.
Предпочтительно, как представлено на фигуре 3, логический блок обработки питается источником 223 питания через регулятор 224 напряжения. Сам источник питания питается выводом преобразователя 221.
Средство для определения напряжения питания катушек содержит делитель 222 напряжения, промежуточный вывод которого воздействует на логический блок обработки.
Средства 225, 226 управления энергоснабжением первой катушки предпочтительно содержат переключатель 226, управляемый логическим блоком 225 обработки. Подобным образом, средства 228, 225 управления энергоснабжением последовательно подключенной группы первой и второй катушки предпочтительно содержат переключатель 228, управляемый логическим блоком 225 обработки.
Средства 225, 227 для определения силы тока, протекающего в первой катушке 211, предпочтительно содержат резистор 227, подключенный последовательно с первой катушкой и управляемым переключателем 226. Например, один вывод резистора 227 заземлен. Потенциал другого вывода резистора воздействует на вход логического блока обработки.
Средства 225, 229 для определения силы тока, протекающего в узле, содержащем первую катушку и вторую катушку, предпочтительно содержат резистор 229, подключенный последовательно с первой и второй катушками и управляемым переключателем 228. Например, один вывод резистора 229 заземлен. Потенциал другого вывода резистора воздействует на вход логического блока обработки.
Этот второй вариант осуществления устройства управления предпочтительно сконструирован, чтобы применяться, когда напряжение на выходе из преобразователя 221 остается ниже первого порогового значения напряжения, например, 100 В.
Второй вариант осуществления приводного механизма 2' описан ниже со ссылкой на фигуру 4. Приводной механизм 2' отличается от приводного механизма 2 тем, что он содержит другое устройство 22' управления. Устройство 22' управления фактически отличается от устройства 22 управления тем, что источник 223 питания питается между выводами резистивного элемента, в частности между выводами измерительного резистора 229. Этот второй вариант осуществления устройства управления предпочтительно сконструирован, чтобы применяться, когда напряжение на выходе из преобразователя 221 превышает первое пороговое значение напряжения, например, 100 В.
Подробности варианта осуществления устройства управления согласно второму варианту осуществления описан ниже со ссылкой на фигуру 5.
В этом варианте осуществления управляемый переключатель 303 подключен последовательно с удерживающей катушкой 212 и стабилитроном 307 между выводами преобразователя 221. Последовательное подключение диода 307 и конденсатора 309 дополнительно параллельно подключено к стабилитрону. Последовательное подключение управляемого переключателя 228 и измерительного резистора 229 также параллельно подключено к стабилитрону. Управляемый переключатель 303 подключен к логическому блоку 225 обработки и к выходному выводу преобразователя 221 через нагрузочный резистор 302. Таким образом, как только преобразователь 221 подает напряжение, управляемый переключатель 303 закрывается. Диод 304 параллельно подключен к удерживающей катушке.
Управляемый переключатель дополнительно управляется логическим блоком 225 обработки и, таким образом, делает возможным короткое замыкание стабилитрона, чтобы измерить ток, протекающий в удерживающей катушке 212, на уровне резистора 229. Можно отметить, что диод 308 не дает току, подаваемому конденсатором 309, протекать в резисторе 229, когда управляемый переключатель 228 закрыт.
Такая конструкция позволяет напряжению, сформированному на выводах стабилитрона, заряжать конденсатор 309, чтобы производить электрический сигнал, предоставляющий необходимую энергию источнику 223 питания.
Например, в пределах постоянного управления, логический блок обработки может регулировать ток питания удерживающей катушки регулярно, например, каждые 312 мкс: при закрытом переключателе 303, ток просто должен быть отведен на резистор 229 посредством управляемого переключателя 228 за короткое время (типично 16 мкс), чтобы знать значение силы тока. Если последняя ниже заданного значения, управляемый переключатель 303 остается включенным, а ток протекает в стабилитроне 307 и конденсаторе 309. Если удерживающая катушка представляет проблему, логический блок обработки может скомандовать открыть управляемый переключатель 303.
Устройство диагностики и/или устройство управления содержит(ат) все средства аппаратного обеспечения и/или программного обеспечения, делающие возможным осуществление способа диагностики, который является предметом изобретения. В частности, устройство диагностики и/или устройство управления содержит(ат) средства аппаратного обеспечения и/или программного обеспечения, делающие возможным осуществление каждого из этапов способа диагностики, который является предметом изобретения. Эти средства могут включать в себя компьютерные программы.
Вариант выполнения способа диагностики согласно изобретению описан ниже со ссылкой на фигуру 6. Предпочтительно, последовательность этапов способа, описанная ниже, повторяется во времени, в частности через правильные промежутки времени. Эти повторения предпочтительно управляются часами, включенными в устройство диагностики.
На первом этапе 100 питание приводного механизма управляется посредством устройства диагностики. Это управление предпочтительно запускается часами и поддерживается в течение предопределенного времени, например 30 мс. В варианте осуществления устройства диагностики, описанного выше, этот этап энергоснабжения выполняется посредством закрывания управляемого переключателя 36. Затем приводной механизм 2 питается энергетической системой через резистор 37. Стоит отметить, что в конце предопределенного времени, упомянутого выше, управляемый переключатель 36 открывается.
На втором этапе 105 энергоснабжение катушки управляется посредством устройства управления приводного механизма. Это предпочтительно выполняется автоматически на уровне приводного механизма в тестовой процедуре, записанной в логическом блоке 225 обработки, и осуществляется, когда выполняется энергоснабжение приводного механизма. Чтобы сделать это, логический блок обработки командует закрывание управляемого переключателя 226. С этого момента ток питания катушки 211 протекает через управляемый переключатель 226 и резистор 227. Этот этап также может содержать энергоснабжение группы катушек 211 и 212. Чтобы сделать это, логический блок обработки командует закрывание управляемого переключателя 228. С этого момента ток питания катушки 212 протекает через управляемый переключатель 228 и резистор 229. Ток питания или токи катушек могут быть детектированы на уровне устройства диагностики, а более точно на уровне резистора 37 устройства диагностики. Энергоснабжение катушки или катушек фактически приводит к большему броску тока на линии энергоснабжения приводного механизма 2.
На третьем этапе 110 электрическая характеристика электрического сигнала, питающего приводной механизм, отслеживается или анализируется на уровне устройства диагностики. Сила электрического тока, питающего приводной механизм, предпочтительно отслеживается, в частности изменение силы электрического тока, питающего приводной механизм, отслеживается на протяжении времени, в течение которого приводной механизм питается через устройство диагностики.
На четвертом этапе 115 производится тестирование того, соответствуют ли вариации или изменения характеристик, в частности силы электрического тока, питающего приводной механизм, тому, какими они должны быть в случае удовлетворительного функционирования приводного механизма. Приводной механизм фактически сконструирован, чтобы поглощать электрический ток, имеющий калиброванную силу, в ходе тестовой процедуры. Если сила электрического тока, поглощенного приводным механизмом, отличается от этого калиброванного значения, тогда можно сделать вывод, что приводной механизм представляет неисправность, в частности, на уровне его катушек и/или неисправность на уровне устройства управления энергоснабжением его катушек. Следуя за этим этапом, выводится диагностика приводного механизма, используя результат этапа отслеживания или этапа анализа.
Если результат тестового этапа 115 положителен, переходим к этапу 120, в котором устанавливается следующая диагностика: приводной механизм функционален. Затем переходим к этапу 125, в течение которого выполняется задержка перед возвращением назад к этапу 100. Задержка времени этапа 125 предпочтительно относительно длинная, типично около одного часа. Диагностика может отображаться через интерфейс.
Если результат тестового этапа 115 отрицателен, переходим к этапу 130, в котором устанавливается следующая диагностика: приводной механизм не функционален. Этап анализа изменений электрической характеристики может, в частности, осуществляться, чтобы определить, какая часть приводного механизма не функциональна, в частности, устройство управления, или пусковая катушка, или удерживающая катушка. Диагностика может отображаться через интерфейс.
Пример изменений силы электрического тока, питающего функционирующий приводной механизм, описан ниже со ссылкой на фигуру 2.
На верхней диаграмме представлено изменение во времени напряжения V7 на выводах приводного механизма при выполнении варианта выполнения способа диагностики согласно изобретению. Можно отметить, что приводной механизм питается в течение 30 мс.
На нижней диаграмме представлено изменение во времени напряжения V37 на выводах резистора 37 устройства диагностики, это напряжение, являющееся образом тока питания приводного механизма. В примерном варианте осуществления после того, как оно подавало энергию на приводной механизм в течение 20 мс, устройство управления энергоснабжением командует короткое закрывание первого управляемого переключателя 226, а затем второго управляемого переключателя 228. Общее время закрывания этих переключателей типично составляет около 2 мс. Между началом энергоснабжения приводного механизма и концом энергоснабжения этих катушек логический блок 225 обработки, например, проверил, что:
- напряжение питания приводного механизма достаточное, чтобы активировать последний посредством измерения напряжения между двумя резисторами делителя 222 напряжения,
- источник питания логического блока 223 обработки функционален,
- электрический ток, протекающий в пусковой катушке, не является ни слишком низким (случай открытой цепи), ни слишком высоким (случай короткого замыкания). Для этих целей может быть использовано измерение напряжения на выводах резистора 227.
- электрический ток, протекающий в удерживающей катушке, не является ни слишком низким (случай открытой цепи), ни слишком высоким (случай короткого замыкания). Для этих целей может быть использовано измерение напряжения на выводах резистора 229.
Если все эти условия выполнены, устройство управления передает результат этих проверок. Чтобы сделать это, логический блок обработки командует, например, закрывание управляемого переключателя 226 в течение короткого периода, например, 1 мс. В противном случаем логический блок управления не командует закрывание управляемого переключателя, питающего одну или другую из катушек.
Следовательно, когда напряжение на выводах резистора 37 устройства диагностики анализируется, как представлено на фигуре 2, два последовательных импульса появляются, когда приводной механизм функционален, и один импульс виден или даже не видно ни одного импульса, когда приводной механизм поврежден.
Этапы тестирования потока тока в катушках могут, естественно, быть расположены во времени по-другому. Подобным образом, замена операций, делающих возможным кодирование результата тестов, выполненных на уровне приводного механизма, может быть расположена во времени по-другому и изменена, с тем чтобы иметь способность кодировать различную информацию, такую как неисправность устройства управления, неисправность пусковой катушки и неисправность удерживающей катушки.
Устройство управления дополнительно является таким, что если напряжение продолжается дольше чем 30 мс, на выводах приводного механизма, оно интерпретирует это энергоснабжение как рабочее энергоснабжение, а не как процедуру диагностики. Затем оно управляет этапом энергоснабжения пусковой катушки в конце 30 мс, например в течение 80 мс, после чего следует энергоснабжение удерживающей катушки, а пусковая катушка деактивируется.
В предпочтительном альтернативном варианте осуществления тестирование удерживающей катушки выполняется неявно из-за того факта, что энергоснабжение логического блока обработки протекает через удерживающую катушку в случае приводного механизма 2'. Если она разорвана, ничего не работает. Более того, в случае приводного механизма 2 состояние удерживающей катушки не может быть протестировано. Функциональности пусковой катушки фактически может хватить для выполнения функции приводного механизма.
Таким образом, благодаря изобретению возможно тестировать электронные схемы управления приводного механизма, правильность электропроводки, наличие напряжения питания и состояние катушки(ек) посредством устройства диагностики.
Значение сопротивления катушки или катушек также может быть определено точно благодаря знанию напряжения питания катушек. Также возможно посредством добавления датчика температуры иметь возможность корректировать измерение сопротивления, чтобы учесть его температурные флуктуации.
Естественно, информационная обратная связь от приводного механизма к устройству диагностики может быть достигнута посредством проводников, отдельных от проводников, выполняющих энергоснабжение приводного механизма.
Разные управляемые переключатели могут быть получены посредством транзисторов.



Изобретение относится к средствам диагностики силового электрооборудования. Способ диагностики приводного механизма (2, 2'), содержащего катушку (211, 212) и устройство (22, 22') управления энергоснабжением катушки, включает следующие этапы: управляют энергоснабжением приводного механизма посредством устройства диагностики (3), управляют энергоснабжением катушки посредством устройства управления, отслеживают на уровне устройства диагностики электрической характеристики электрического сигнала, в частности электрического сигнала, питающего приводной механизм, и диагностируют приводной механизм с использованием результатов этапа отслеживания. Технический результат заключается в упрощении диагностики электрооборудования. 3 н. и 11 з.п. ф-лы, 6 ил.
1. Способ диагностики приводного механизма (2, 2'), содержащего катушку (211, 212) и устройство (22, 22') управления энергоснабжением катушки, содержащий следующие этапы:
- управления энергоснабжением приводного механизма посредством устройства диагностики (3),
- управления энергоснабжением катушки посредством устройства управления,
- отслеживания на уровне устройства диагностики электрической характеристики электрического сигнала, в частности электрического сигнала, питающего приводной механизм, и
- вывода диагностики приводного механизма с использованием результатов этапа отслеживания.
2. Способ диагностики по предыдущему пункту, отличающийся тем, что этап управления энергоснабжением приводного механизма содержит активацию средства (32, 36) управления энергоснабжением приводного механизма.
3. Способ диагностики по п.1 или 2, отличающийся тем, что этап управления энергоснабжением катушки содержит активацию средства (225, 226, 228) управления энергоснабжением катушки.
4. Способ диагностики по п.1 или 2, отличающийся тем, что этап отслеживания на уровне диагностики электрической характеристики электрического сигнала содержит определение силы тока, протекающего в линии энергоснабжения приводного механизма, или определение напряжения на выводах резистивного элемента (37), через который протекает ток, протекающий в линии энергоснабжения приводного механизма.
5. Способ диагностики по п.1 или 2, отличающийся тем, что этап вывода диагностики приводного механизма содержит основанный на времени анализ изменений электрической характеристики.
6. Устройство (3) диагностики энергоснабжения катушки приводного механизма, содержащее средства аппаратного обеспечения (32, 33, 34, 35, 36, 37, 222, 223, 224, 225, 226, 227, 228, 229) и/или средства программного обеспечения для реализации этапов способа диагностики по одному из пп.1-5.
7. Устройство диагностики по предыдущему пункту, отличающееся тем, что средства аппаратного обеспечения и/или программного обеспечения содержат средство (32, 36) управления энергоснабжением приводного механизма.
8. Устройство диагностики по п.6 или 7, отличающееся тем, что средства аппаратного обеспечения и/или программного обеспечения содержат средство (33, 37) для отслеживания электрической характеристики электрического сигнала, упомянутое средство, являющееся средством (33, 37) для определения силы тока, протекающего в линии энергоснабжения приводного механизма, или средством (33) для определения напряжения на выводах резистивного элемента (37), через который протекает ток, протекающий в линии энергоснабжения приводного механизма.
9. Устройство диагностики по п.6 или 7, отличающееся тем, что средства аппаратного обеспечения и/или программного обеспечения содержат средство (38) для вывода диагностики приводного механизма, упомянутое средство, являющееся средством для основанного на времени анализа изменений электрической характеристики электрического сигнала.
10. Устройство диагностики по п.6 или 7, отличающееся тем, что средства аппаратного обеспечения и/или программного обеспечения содержат средство (225, 226, 228) управления энергоснабжением катушки.
11. Устройство диагностики по п.6 или 7, отличающееся тем, что средства аппаратного обеспечения и/или программного обеспечения содержат средство (225, 227, 229) для определения силы тока, протекающего в катушке, и средство (225) для анализа силы тока, протекающего в катушке.
12. Устройство диагностики по п.6 или 7, отличающееся тем, что средства аппаратного обеспечения и/или программного обеспечения содержат средство (222, 225) для определения напряжения питания катушки и средство (225) для анализа напряжения энергоснабжения катушки.
13. Приводной механизм (2), содержащий катушку (211, 212) и по меньшей мере одно устройство управления, отличающийся тем, что он содержит устройство (3, 22) диагностики по одному из пп.6-12.
14. Приводной механизм (2) по п.13, отличающийся тем, что устройство (3, 22) диагностики состоит из двух отдельных устройств, первого устройства (3) диагностики и второго устройства (22) управления.
| US 5784245 A, 21.07.1998 | |||
| US 2009139505 A1, 04.06.2009 | |||
| СПОСОБ ДИАГНОСТИКИ ИНДУКТИВНЫХ ОБМОТОК | 2007 |
|
RU2336535C1 |
| СПОСОБ ДИАГНОСТИКИ ИНДУКТИВНЫХ ОБМОТОК | 2009 |
|
RU2388004C1 |

