Область техники
Настоящее изобретение относится к приводному контроллеру для электродвигателя переменного тока (AC), подходящему для возбуждения синхронного электродвигателя с постоянными магнитами, встроенного в электрическое транспортное средство.
Предшествующий уровень техники
Синхронный электродвигатель с постоянными магнитами (далее в данном документе просто "электродвигатель", пока иное не потребует особых отличий) известен как высокоэффективный электродвигатель. По сравнению с асинхронными электродвигателями, традиционно используемыми в различных областях, синхронный электродвигатель с постоянными магнитами не требует какого-либо тока возбуждения, поскольку магнитный поток устанавливается постоянным магнитом, встроенным в ротор, а вторичных потерь в меди не возникает, поскольку ток не протекает в роторе в отличие от асинхронных электродвигателей. В то время как электрические транспортные средства традиционно используют асинхронные электродвигатели, в последние годы для повышения эффективности изучается применение в них синхронного двигателя с постоянными магнитами.
В электрических транспортных средствах приводной контроллер для электродвигателя переменного тока и электродвигатель встроены в каждое из множества комбинированных транспортных средств. Даже когда в приводном контроллере электродвигателя переменного тока определенного транспортного средства происходит короткое замыкание, когда транспортное средство движется, электрическое транспортное средство может продолжать двигаться посредством других приводных контроллеров электродвигателей переменного тока и электродвигателей, которые работают нормально. Электродвигатель, подключенный к поврежденному приводному контроллеру электродвигателя переменного тока, продолжает приводиться в движение колесами. Следовательно, ток короткого замыкания, вызванный индуцированным напряжением электродвигателя, продолжает протекать в части приводного контроллера электродвигателя переменного тока, где произошло короткое замыкание (закороченная часть).
Когда такое состояние остается таким, как есть, поврежденная часть приводного контроллера электродвигателя переменного тока может дополнительно расширяться от тепла, формируемого током короткого замыкания, и поврежденная часть электродвигателя может выделять тепло или выгорать, что нежелательно.
Чтобы учитывать такие случаи, например, патентный документ 1 раскрывает способ, в котором предусмотрен отключающий контактор электродвигателя, который служит в качестве переключателя со стороны электродвигателя, который электрически отсоединяет инвертор от электродвигателя. Блок управления управляет контактором, чтобы размыкать его для электрического отсоединения инвертора от электродвигателя, когда детектируется неисправность в инверторе. Таким образом, инвертор дополнительно не повреждается, когда в инверторе в приводном контроллере электродвигателя переменного тока, управляющем приведением в движение синхронного электродвигателя с постоянными магнитами, происходит короткое замыкание, пока электрическое транспортное средство движется.
Патентный документ 1: Японская выложенная патентная заявка № H8-182105
Как, в общем, известно, поскольку точка перехода тока через нуль формируется в переменном токе с синусоидальной формой волны для каждого полупериода формы волны тока, ток может прерываться с помощью точки перехода тока через нуль. Отключающий контактор электродвигателя, раскрытый в патентном документе 1, упомянутый выше, является контактором, который прерывает переменный ток с помощью точки перехода тока через нуль для прерывания тока. Примеры контактора, который прерывает переменный ток, как правило, включают в себя вакуумный контактор, к которому применяется система прерывания тока в точках перехода тока через нуль.
Было обнаружено, что фаза, в которой точка перехода тока через нуль не формируется, и фаза, в которой точка перехода тока через нуль формируется, иногда присутствуют одновременно в токе повреждения в зависимости от типа неисправности, возникшей в приводном контроллере электродвигателя переменного тока. Ток повреждения - это ток, который протекает между инвертором в приводном контроллере электродвигателя переменного тока и электродвигателем. Когда вышеупомянутый отключающий контактор электродвигателя, использующий систему прерывания тока в точках перехода тока через нуль, прерывает ток повреждения, ток фазы, в которой точка перехода тока через нуль существует, прерывается; однако ток не может быть прерван в других фазах, не имеющих точек перехода тока через нуль, и, таким образом, инвертор остается электрически соединенным с электродвигателем непрерывно формируемой электрической дугой.
В таком состоянии повреждения электродвигатель приводится в несбалансированное состояние, поскольку только фаза, в которой ток прерывается, из трех фаз отсоединяется от инвертора. Следовательно, избыточное напряжение формируется между линиями электродвигателя и между контактами отключающего контактора электродвигателя. Это избыточное напряжение может приводить к разрушению изоляции катушек в электродвигателе, отключающем контакторе электродвигателя и кабелях, соединяющих отключающий контактор электродвигателя с электродвигателем. Дополнительно, поскольку электрическая дуга продолжает формироваться между контактами отключающего контактора электродвигателя, отключающий контактор электродвигателя может быть поврежден.
Краткое изложение существа изобретения
Задачей настоящего изобретения является создание приводного контроллера для электродвигателя переменного тока. Приводной контроллер сконфигурирован так, что, даже когда фаза, в которой точка перехода тока через нуль не формируется, и фаза, в которой точка перехода тока через нуль формируется, присутствуют одновременно в токе повреждения, протекающем между инвертором и электродвигателем, формирование избыточного напряжения между линиями электродвигателя и между контактами отключающего контактора электродвигателя может быть предотвращено, и формирование непрерывной электрической дуги между контактами отключающего контактора электродвигателя может быть предотвращено, несмотря на тип возникшей неисправности.
Аспектом настоящего изобретения является приводной контроллер для электродвигателя переменного тока, включающий в себя: инвертор, который включает в себя множество переключающих элементов с управляемым включением-выключением и преобразует напряжение постоянного тока (DC) в напряжение переменного тока (AC) с произвольной частотой, для возбуждения электродвигателя переменного тока; переключатель со стороны электродвигателя, подключенный между инвертором и электродвигателем переменного тока; детектор электрической величины, который детектирует электрическую величину с выходной стороны инвертора; и блок управления, который управляет включением-выключением переключающих элементов в инверторе и управляет переключателем со стороны электродвигателя, чтобы размыкать и замыкать его на основе, по меньшей мере, тока, детектированного детектором электрической величины, при этом блок управления включает в себя: блок определения состояния тока, который формирует сигнал определения, определяющий, находится ли ток, детектированный детектором электрической величины, в ненормальном состоянии, и блок управления контактором, который управляет, на основе сигнала определения, моментом фактического вывода инструкции верхнего уровня, которая сформирована для размыкания переключателя на стороне электродвигателя, переключателю на стороне электродвигателя.
Согласно настоящему изобретению, даже когда фаза, в которой точка перехода тока через нуль не формируется, и фаза, в которой точка перехода тока через нуль формируется, присутствуют одновременно в токе повреждения, протекающем между инвертором и электродвигателем, формирование избыточного напряжения между линиями электродвигателя и между контактами отключающего контактора электродвигателя может быть предотвращено, и формирование непрерывной электрической дуги между контактами отключающего контактора электродвигателя может быть предотвращено, несмотря на тип возникшей неисправности. Следовательно, возможно получить приводной контроллер для электродвигателя переменного тока, в котором изоляция катушек в электродвигателе, отключающий контактор электродвигателя и кабели, соединяющие отключающий контактор электродвигателя с электродвигателем, не повреждаются, и отключающий контактор электродвигателя не повреждается электрической дугой, формируемой между контактами отключающего контактора электродвигателя, несмотря на тип возникшей неисправности.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых;
Фиг. 1 изображает структурную схему примера конфигурации приводного контроллера для электродвигателя переменного тока согласно первому варианту осуществления настоящего изобретения;
Фиг. 2 изображает схему примера конфигурации инвертора, показанного на фиг. 1;
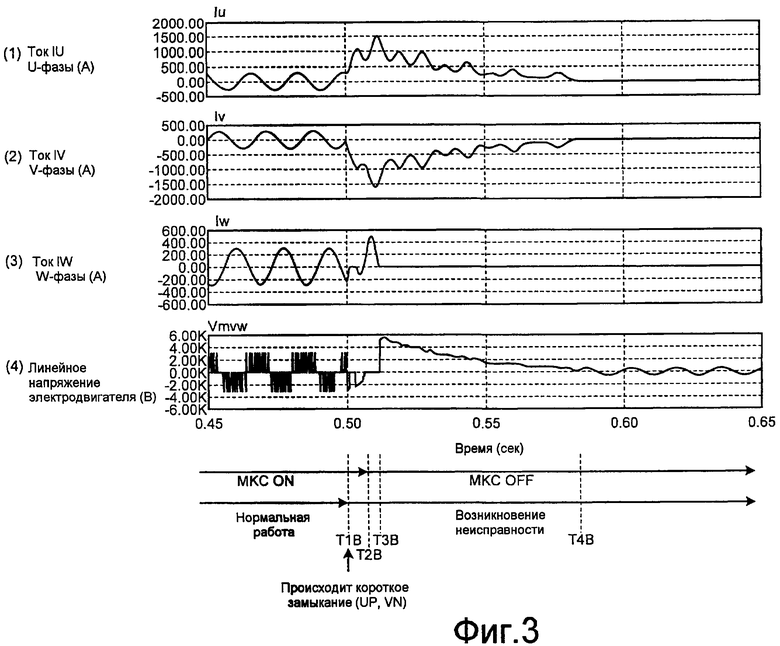
Фиг. 3 изображает диаграмму формы волны примерной неисправности, которая происходит, когда фаза, в которой точка перехода тока через нуль не формируется, и фаза, в которой точка перехода тока через нуль формируется, присутствуют одновременно в токе повреждения, форм волн тока в момент неисправности и формы волны линейного напряжения электродвигателя;
Фиг. 4 изображает характеристическую диаграмму соотношения между амплитудой тока непрерванной фазы и амплитудой линейного напряжения, сформированного в электродвигателе, показана ситуация, где произошла неисправность, и фаза, в которой точка перехода тока через нуль не формируется, и фаза, в которой точка перехода тока через нуль формируется, присутствуют одновременно в токе повреждения, и когда фаза, в которой точка перехода тока через нуль формируется, прерывается;
Фиг. 5 изображает структурную схему примера конфигурации блока управления, показанного на фиг. 1;
Фиг. 6 изображает структурную схему примера конфигурации блока определения состояния тока, показанного на фиг. 5;
Фиг. 7 изображает диаграмму формы волны, объясняющую операцию управления первого варианта осуществления, в котором ток прерывается посредством формирования точки перехода тока через нуль в фазе, не имеющей точки перехода тока через нуль, когда происходит неисправность, показанная на фиг. 3;
Фиг. 8 изображает структурную схему примера конфигурации приводного контроллера для электродвигателя переменного тока согласно второму варианту осуществления настоящего изобретения;
Фиг. 9 изображает структурную схему примера конфигурации блока управления, показанного на фиг. 8.
Описание предпочтительных вариантов осуществления изобретения
Примерные варианты осуществления приводного контроллера электродвигателя переменного тока согласно настоящему изобретению будут объяснены ниже подробно со ссылкой на сопровождающие чертежи.
Первый вариант осуществления
Фиг. 1 - это структурная схема примера конфигурации приводного контроллера для электродвигателя переменного тока согласно первому варианту осуществления настоящего изобретения. На фиг. 1 показан токосниматель 1, соприкасающийся с электрическими проводами контактной сети, чтобы принимать электроэнергию в электрическом транспортном средстве. Ссылочный номер 2 обозначает рельс, ссылочный номер 3 обозначает колесо электрического транспортного средства, а ссылочный номер 6 обозначает электродвигатель переменного тока. Электродвигатель 6 переменного тока встроен в транспортное средство вместе с приводным контроллером 10A электродвигателя переменного тока согласно первому варианту осуществления, и его вращающийся вал механически сопряжен с колесом 3. Электродвигатель 6 переменного тока снабжен детектором 7 вращения.
Приводной контроллер 10A электродвигателя переменного тока (фиг. 1) включает в себя в качестве основных компонентов настоящего изобретения, контактор 11 для отключения подачи электропитания, инвертор 12, детекторы 13, 14 и 15 тока, отключающий контактор 16 электродвигателя и блок 17A управления.
Один конец контактора 11 для отключения подачи электропитания соединен с выходным контактом токоснимателя 1, а другой его конец соединен через проводник P положительной стороны с входным контактом инвертора 12 положительной стороны. Т.е. контактор 11 для отключения подачи электропитания - это переключатель со стороны источника электропитания, способный разъединять сторону ввода постоянного тока инвертора 12 и токосниматель 1, служащий в качестве источника электропитания.
Входной контакт инвертора 12 отрицательной стороны соединяется через проводник N отрицательной стороны с колесом 3. Такая конфигурация позволяет подавать мощность постоянного тока с токоснимателя 1 через контактор 11 для отключения электропитания и с рельса 2 через колесо 3 в инвертор 12. Инвертор 12 преобразует мощность постоянного тока, подведенную посредством проводника P положительной стороны и проводника N отрицательной стороны, в мощность переменного тока посредством конфигурации, показанной на фиг. 2, например.
На Фиг. 2 показана схема примера конфигурации инвертора 12, показанного на фиг. 1. Инвертор 12 сконфигурирован так, что так называемая схема трехфазного двухуровневого инвертора подключена между проводником P положительной стороны и проводником N отрицательной стороны. Схема 18 разряда и конденсатор 19 фильтра предусмотрены параллельно между проводником P положительной стороны и проводником N отрицательной стороны.
Схема трехфазного двухуровневого инвертора является мостовой схемой из трех переключающих элементов плеча положительной стороны (элемент UP верхнего плеча U-фазы, элемент VP верхнего плеча V-фазы и элемент WP верхнего плеча W-фазы), соединенных с проводником P положительной стороны, и трех переключающих элементов плеч отрицательной стороны (элемент UN нижнего плеча U-фазы, элемент VN нижнего плеча V-фазы, элемент WN нижнего плеча W-фазы), соединенных с проводником N отрицательной стороны. Диод подключен встречно-параллельно с каждым переключающим элементом. Точки соединения верхних элементов плеча и нижних элементов плеча в соответствующих фазах формируют трехфазные выходные контакты, и эти выходные контакты соединены с проводником UI U-фазы со стороны инвертора, проводником VI V-фазы со стороны инвертора и проводником WI W-фазы со стороны инвертора, соответственно. Хотя на фиг. 2 в качестве переключающего элемента показан хорошо известный IGBT, могут быть использованы переключающие элементы, отличные от IGBT. В то время как схема трехфазного двухуровневого инвертора показана на фиг. 2, может быть использована схема многоуровневого инвертора, такого как схема трехуровневого инвертора.
Хотя на фиг. 2 не показано, инвертор 12 снабжен схемой возбуждения для приема стробирующего сигнала GS, выводимого из блока 17A управления в инвертор 12 на фиг. 1. Эта схема возбуждения имеет функцию индивидуального управления включением-выключением шести переключающих элементов согласно стробирующему сигналу GS.
Как показано на фиг. 1, трехфазные выходные контакты инвертора 12 соединены с отключающим контактором 16 электродвигателя через проводник UI U-фазы со стороны инвертора, проводник VI V-фазы со стороны инвертора и проводник WI W-фазы со стороны инвертора. Отключающий контактор 16 электродвигателя соединен с электродвигателем 6 переменного тока через проводник UM U-фазы со стороны электродвигателя, проводник VM V-фазы со стороны электродвигателя и проводник WM W-фазы со стороны электродвигателя.
Согласно инвертору 12 с конфигурацией, описанной выше, соответствующие переключающие элементы в схеме инвертора включаются или выключаются согласно стробирующему сигналу GS, вводимому блоком 17A управления. Таким образом, подводимое напряжение постоянного тока преобразуется в трехфазное напряжение переменного тока с произвольной частотой, и электродвигатель 6 переменного тока приводится в действие через отключающий контактор 16 электродвигателя. Электродвигатель 6 переменного тока затем вращает механически сопряженное колесо 3, чтобы двигать электрическое транспортное средство по рельсу 2.
Напряжение на выводах конденсатора 19 фильтра, по существу, равно напряжению, принятому с токоснимателя 1 (напряжению электропровода контактной сети), и равно приблизительно 600-3000 В постоянного тока в обычных электрических транспортных средствах.
Хотя подробные внутренние конфигурации не показаны, схема 18 разряда сконфигурирована последовательной схемой, сформированной из резистора и переключателя (включающего в себя полупроводниковый переключатель) и схемы для разряда электрических зарядов в конденсаторе 19 фильтра на основе команды OV разряда. Команда OV разряда вводится из блока 17A управления или высокоуровневого устройства (не показано) в предварительно определенном случае, как, например, когда возникает какая-либо неисправность в приводном контроллере 10A электродвигателя переменного тока. Хотя не показано, когда схема 18 разряда выполняет операцию разряда, контактор 11 для отключения подачи электропитания управляется, чтобы размыкаться, в то же самое время блоком 17A управления или высокоуровневым устройством (не показано).
Обращаясь к фиг. 1, детекторы 13, 14 и 15 тока предусмотрены соответственно на проводнике UI U-фазы со стороны инвертора, проводнике VI V-фазы со стороны инвертора и проводнике WI W-фазы со стороны инвертора, которые подключены между выходными контактами трех фаз инвертора 12 и отключающего контактора 16 электродвигателя. Ток IU U-фазы, ток IV V-фазы и ток IW W-фазы, детектированные детекторами 13, 14 и 15 тока, соответственно вводятся в блок 17A управления. В то время как детекторы тока сконфигурированы для определения соответствующих трехфазных выходных токов инвертора 12 на фиг. 1, произвольный двухфазный ток может быть детектирован. Ток в фазе, на которой детектор тока не предусмотрен, может быть вычислен.
Отключающий контактор 16 электродвигателя является переключателем со стороны электродвигателя, способным отсоединять выходные контакты трех фаз инвертора 12 от электродвигателя 6 переменного тока согласно инструкции от блока 17A управления (команда MKC замыкания контактора). Отключающий контактор 16 электродвигателя сформирован посредством контактора, способного прерывать переменный ток. Поскольку точка перехода тока через нуль формируется в переменном токе в каждом полупериоде формы волны этого тока, контактор, который способен прерывать переменный ток, обычно прерывает ток, используя точку перехода тока через нуль.
Отключающий контактор 16 электродвигателя сконфигурирован так, что, когда команда MKC замыкания контактора от блока 17A управления активируется, замыкающая катушка возбуждается, главные контакты, механически соединенные с замыкающей катушкой, замыкаются, чтобы замкнуть три фазы, и, таким образом, инвертор 12 электрически соединяется с электродвигателем 6 переменного тока. Дополнительно, отключающий контактор 16 электродвигателя сконфигурирован так, что, когда команда MKC замыкания контактора от блока 17A управления деактивируется, возбуждение замыкающей катушки прекращается, главный контакт размыкается, чтобы размыкать соответствующие три фазы, и, таким образом, инвертор 12 электрически отсоединяется от электродвигателя 6 переменного тока.
Отключающий контактор 16 электродвигателя может быть сконфигурирован, чтобы управлять главными контактами трех фаз посредством одной замыкающей катушки, или может быть сконфигурирован, чтобы предоставлять замыкающие катушки для соответствующих главных контактов трех фаз. В последней конфигурации момент замыкания и размыкания может устанавливаться индивидуально в соответствующих фазах.
Состояние вращения электродвигателя 6 переменного тока детектируется детектором 7 вращения и вводится в блок 17A управления. Так называемая бездатчиковая система управления для управления электродвигателем 6 переменного тока без детектора 7 вращения также используется на практике. Когда выбрана бездатчиковая система управления, детектор 7 вращения не нужен. В случае бездатчиковой системы управления детектор напряжения (не показан) может быть предусмотрен во входном каскаде (от проводника UI U-фазы со стороны инвертора до проводника WI W-фазы) или выходном каскаде (от проводника UM U-фазы со стороны электродвигателя до проводника WM W-фазы) отключающего контактора 16 электродвигателя, чтобы детектировать выходное напряжение инвертора 12 или напряжение на клеммах электродвигателя 6 переменного тока, и детектор напряжения вводит результат определения в блок 17A управления.
В настоящем варианте осуществления, как описано выше, предполагается, что электродвигатель 6 переменного тока является синхронным электродвигателем с постоянными магнитами. Впрочем, существует электродвигатель, в котором постоянный магнит заключен в роторе асинхронного электродвигателя. Настоящее изобретение может быть применено, в дополнение к синхронному электродвигателю с постоянными магнитами, к таким электродвигателям, в которых постоянный магнит встроен в ротор.
Как описано выше, авторы настоящего изобретения обнаружили, что фаза, в которой точка перехода тока через нуль не формируется, и фаза, в которой точка перехода тока через нуль формируется, присутствуют одновременно в токе повреждения, который протекает между инвертором 12 в приводном контроллере 10A электродвигателя переменного тока и электродвигателем 6 переменного тока, в зависимости от типа неисправности, возникшей в приводном контроллере электродвигателя переменного тока.
Блок 17A управления сконфигурирован так, что формирование избыточного напряжения между линиями электродвигателя 6 переменного тока и между контактами отключающего контактора 16 электродвигателя предотвращается, и формирование непрерывной электрической дуги между контактами отключающего контактора 16 электродвигателя предотвращается на основе трехфазных токов IU, IV и IW, детектированных детекторами 13, 14 и 15 тока, стробирующего сигнала GS и команды OV разряда, которые применяются к инвертору 12, и базового стробирующего сигнала GC и базовой команды MKCO замыкания контактора от внешнего высокоуровневого устройства (не показано). Таким образом, отключающий контактор 16 электродвигателя, который прерывает переменный ток, может быть разомкнут надежно в трех фазах даже в случае, когда протекает ток повреждения, и фаза, в которой точка перехода тока через нуль не формируется, и фаза, в которой точка перехода тока через нуль формируется, присутствуют одновременно.
Чтобы облегчить понимание, формирование тока повреждения, в котором фаза, в которой точка перехода тока через нуль не формируется, и фаза, в которой точка перехода тока через нуль формируется, присутствуют одновременно, и формирование избыточного напряжения объясняются подробно сначала (фиг. 3 и 4). Конфигурация блока 17A управления (фиг. 5 и 6) и его операции (фиг. 7) объясняются подробно далее.
Далее описываются примерные ситуации, когда формируется ток повреждения, в котором фаза, в которой точка перехода тока через нуль не формируется, и фаза, в которой точка перехода тока через нуль формируется, присутствуют одновременно. Ток повреждения формируется, когда один или более переключающих элементов из трех элементов (UP, VP и WP) верхнего плеча, соединенных с проводником P положительной стороны, и один или более переключающих элементов из трех элементов (UN, VN и WN) нижнего плеча, соединенных с проводником N отрицательной стороны, подвергаются короткому замыканию. Кроме того, ток повреждения формируется, когда эти переключающие элементы остаются включенными из-за их повреждений или из-за повреждения в возбуждающей схеме (не показана).
На Фиг. 3 показана диаграмма формы волны примерного повреждения, в котором фаза, в которой точка перехода тока через нуль не формируется, и фаза, в которой точка перехода тока через нуль формируется, присутствуют одновременно в токе повреждения, формы волны тока в момент повреждения и формы волны линейного напряжения электродвигателя. Фиг. 4 - это характеристическая диаграмма соотношения между амплитудой тока непрерванной фазы и амплитудой линейного напряжения, сформированного в электродвигателе. Фиг. 4 показывает ситуацию, где произошло повреждение, и фаза, в которой точка перехода тока через нуль не формируется, и фаза, в которой точка перехода тока через нуль формируется, присутствуют одновременно в токе повреждения, и когда фаза, в которой точка перехода тока через нуль формируется, прерывается.
Например, рассмотрим случай, когда короткое замыкание происходит в элементе UP верхнего плеча U-фазы и элементе VN нижнего плеча V-фазы, когда электродвигатель 6 переменного тока вращается посредством действия приводного контроллера 10А электродвигателя переменного тока. Дополнительно, все остальные переключающие элементы (VP, WP, UN и WN) выключаются блоком детектирования повреждения, предусмотренным в высокоуровневом устройстве (не показано) в блоке 17A управления.
В этом случае, ток повреждения протекает между электродвигателем 6 переменного тока и инвертором 12 через элемент UP верхнего плеча U-фазы и элемент VN нижнего плеча V-фазы, все еще включенные из-за короткого замыкания, и диоды, соединенные с остальными переключающими элементами (VP, WN, UN и WN).
Фиг. 3 изображает формы с (1) по (3) волны тока соответствующих фаз и форму (4) волны линейного напряжения между V-фазой и W-фазой электродвигателя 6 переменного тока, когда короткое замыкание происходит в элементе UP верхнего плеча U-фазы и элементе VN нижнего плеча V-фазы, и все остальные переключающие элементы (VP, WP, UN и WN) выключены, как описано выше.
Со ссылкой на фиг. 3, время T1B указывает время, когда короткое замыкание происходит в элементе UP верхнего плеча U-фазы и элементе VN нижнего плеча V-фазы. Элементы плечей нормально работают перед временем T1B. После времени T1B элементы плечей работают в состоянии повреждения. Отключающий контактор 16 электродвигателя замыкается командой MKC замыкания контактора, которая является активированной, до времени T2B непосредственно после времени T1B, и затем размыкается в момент T2B командой MKC замыкания контактора, которая становится неактивной.
Перед временем T1B, когда происходит короткое замыкание в элементе UP верхнего плеча U-фазы и элементе VN нижнего плеча V-фазы, все переключающие элементы в инверторе 12 находятся в нормальном состоянии, и электродвигатель 6 переменного тока приводится в действие с частотой вращения, равной 63 Гц. Обычная точка перехода тока через нуль появляется в формах (1)-(3) волны тока соответствующих фаз. Нормальная форма волны положительно-отрицательного напряжения появляется в форме (3) волны линейного напряжения между V-фазой и W-фазой электродвигателя 6 переменного тока.
В состоянии, когда электродвигатель 6 переменного тока приводится в действие с частотой вращения, равной 63 Гц, короткое замыкание происходит в элементе UP верхнего плеча U-фазы и элементе VN нижнего плеча V-фазы в момент T1B. Остальные переключающие элементы (VP, WP, UN и WN), таким образом, управляются, чтобы быть выключенными. В течение интервала времени между временем T1B и временем T2B, когда отключающий контактор 16 электродвигателя размыкается, ток IU U-фазы сильно смещается в положительную сторону, как представлено формой (1) волны. Ток IV V-фазы сильно смещается в отрицательную сторону, как представлено формой (2) волны. Ток IU U-фазы и ток IV V-фазы имеют форму волны без какой-либо точки перехода тока через нуль. С другой стороны, ток IW W-фазы показывает асимметричное изменение тока, которое показано формой (3) волны, в которой существует точка перехода тока через нуль.
Причина того, почему ток IU U-фазы увеличивается, значительно смещаясь в положительную сторону, и ток IV V-фазы увеличивается, значительно смещаясь в отрицательную сторону, заключается в следующем. Поскольку элемент UP верхнего плеча U-фазы и элемент VN нижнего плеча V-фазы сохраняют включенное состояние, напряжение постоянного тока прикладывается от конденсатора 19 фильтра между U-фазой и V-фазой электродвигателя 6 переменного тока. С его помощью постоянная составляющая формируется в токе IU U-фазы и токе IV V-фазы. Когда такое состояние остается таким как есть, постоянные составляющие тока IU U-фазы и тока IV V-фазы дополнительно увеличиваются, приводя в результате к повреждениям приводного контроллера 10A электродвигателя переменного тока.
Чтобы избегать этой проблемы, контактор 11 для отключения подачи электропитания размыкается и, в то же самое время, схема 18 разряда включается для того, чтобы разряжать накопленные электрические заряды в конденсаторе 19 фильтра, так что постоянная составляющая не прикладывается к электродвигателю 6 переменного тока. Чтобы предотвращать протекание тока от электродвигателя 6 переменного тока к инвертору 12, отключающий контактор 16 электродвигателя должен быть разомкнут, чтобы быстро отсоединить инвертор 12 от электродвигателя 6 переменного тока.
Следовательно, обычно, высокоуровневое устройство (не показано), которое детектировало повреждение, отключает питание замыкающей катушки отключающего контактора 16 электродвигателя, чтобы та не возбуждалась, немедленно после момента T1B, когда происходит короткое замыкание. Главный контакт отключающего контактора 16 электродвигателя, таким образом, размыкается в момент T2B.
Со ссылкой на фиг. 3, вследствие вышеописанной операции ток IW W-фазы, указанный формой (3) волны, в котором формируется точка перехода тока через нуль, прерывается, чтобы стать нулевым в момент T3B непосредственно после того, как главный контакт отключающего контактора 16 электродвигателя размыкается. Форма (4) волны указывает, что избыточное линейное напряжение формируется между V-фазой и W-фазой электродвигателя 6 переменного тока. Формы (1) и (2) волн указывают, что ток IU U-фазы и ток IV V-фазы смещаются, и, таким образом, точки перехода тока через нуль не существуют в соответствующих токах. Таким образом, токи не могут прерываться после времени T2B, когда главный контакт отключающего контактора 16 электродвигателя размыкается, и все еще протекают до момента T4B, когда формируется точка перехода тока через нуль.
Когда такое состояние продолжается, электрическая дуга продолжает формироваться между контактами U-фазы отключающего контактора 16 электродвигателя и между его контактами V-фазы, отключающий контактор 16 электродвигателя может выйти из строя из-за тепла, выделяемого электрической дугой. Газ от электрической дуги может вызывать ухудшение окружающей изоляции и короткие замыкания в отключающем контакторе 16 электродвигателя и его периферийных основных схемах.
Избыточное напряжение между линиями между V-фазой и W-фазой электродвигателя 6 переменного тока формируется за счет характерной особенности синхронного двигателя с постоянными магнитами, сконфигурированного посредством установки постоянного магнита в ротор. В частности, избыточное напряжение формируется на основе величины индуктивности обмотки статора, которая изменяется согласно углу поворота ротора, изменения индуктивности по времени и амплитуды тока и его изменения по времени в качестве основных факторов. Амплитуда избыточного напряжения указывается немного меньшей двух номинальных напряжении на фиг. 3. Как описано со ссылкой на фиг. 4, однако, поскольку ток, когда главный контакт отключающего контактора 16 электродвигателя размыкается, становится большим, или поскольку частота вращения электродвигателя 6 переменного тока увеличивается, амплитуда избыточного напряжения увеличивается, и его максимальное значение достигает десятикратного номинального напряжения.
На Фиг. 4 показан пример характеристик соотношения между амплитудой тока IU U-фазы и амплитудой линейного напряжения, сформированного в электродвигателе 6 переменного тока, когда ток IW W-фазы прерывается. Ссылочный номер 50 обозначает характеристику, когда частота FM вращения электродвигателя 6 переменного тока равна 332 Гц. Ссылочный номер 51 обозначает характеристику, когда частота FM вращения электродвигателя 6 переменного тока равна 63 Гц.
Со ссылкой на фиг. 4, когда ток IU U-фазы равен приблизительно 1500 А в момент времени, когда ток IW W-фазы прерывается в характеристике 51, в которой частота FM вращения электродвигателя 6 переменного тока равна 63 Гц, избыточное напряжение, такое как 5 кВ или выше, прикладывается между линиями электродвигателя 6 переменного тока. С другой стороны, когда ток IU U-фазы равен приблизительно 1500 А в момент времени, когда ток IW W-фазы прерывается в характеристике 50, в которой частота FM вращения электродвигателя 6 переменного тока равна 332 Гц, которая является максимальной частотой, избыточное напряжение, такое как 30 кВ или выше, прикладывается между линиями электродвигателя 6 переменного тока.
Избыточное линейное напряжение характеристики 50 приблизительно в десять раз больше, чем номинальное напряжение. Изоляция электродвигателя 6 переменного тока и основных схем на стороне электродвигателя 6 переменного тока ниже по течению тока, чем отключающий контактор 16 электродвигателя (например, отключающего контактора 16 электродвигателя и проводника UM U-фазы со стороны электродвигателя, проводника VM V-фазы со стороны электродвигателя и проводника WM W-фазы со стороны электродвигателя, соединяющих отключающий контактор 16 электродвигателя с электродвигателем 6 переменного тока) может быть нарушена соответствующим образом, приводя к повреждению приводного контроллера 10A электродвигателя переменного тока.
Напряжение, приложенное к инвертору 12 (напряжение шины), и напряжения проводника UI U-фазы со стороны инвертора, проводника VI V-фазы со стороны инвертора и проводника WI W-фазы со стороны инвертора, соединяющих инвертор 12 с отключающим контактором 16 электродвигателя (линейное напряжение и напряжение на землю) не увеличиваются до напряжения на выводах конденсатора 19 фильтра (напряжения электропровода контактной сети) или выше из-за диодного элемента, встроенного в переключающий элемент. Т.е. изоляция между элементами верхнего и нижнего плечей инвертора 12 и изоляция проводника UI U-фазы со стороны инвертора, проводника VI V-фазы со стороны инвертора и проводника WI W-фазы со стороны инвертора, соединяющих инвертор 12 с отключающим контактором 16 электродвигателя, не повреждается.
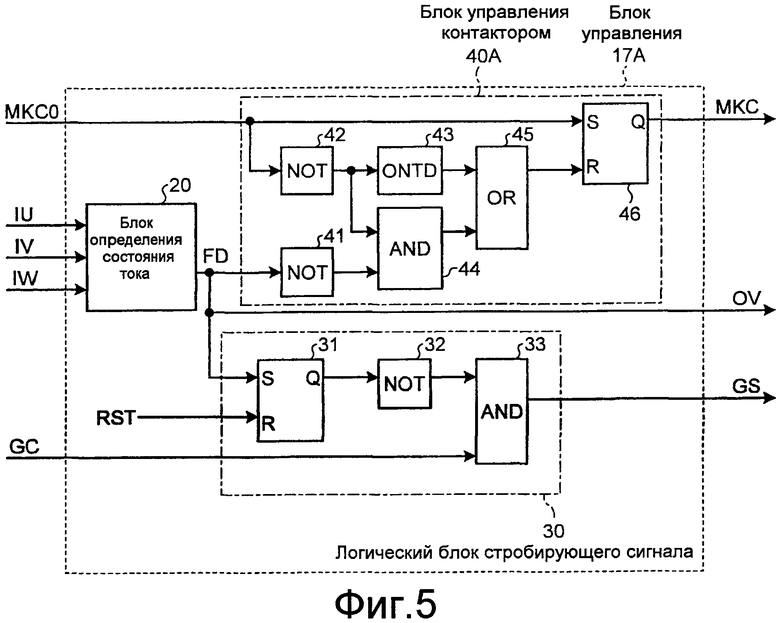
Блок 17A управления сконфигурирован на основе заключений, упомянутых выше. На Фиг. 5 показана структурная схема блока 17A управления, показанного на фиг. 1. На Фиг. 6 показана структурная схема блока 20 определения состояния тока, показанного на фиг. 5.
Как показано на фиг. 5, блок 17A управления включает в себя, например, блок 20 определения состояния тока, логический блок 30 стробирующего сигнала и блок 40A управления контактором. Эти блоки описаны ниже в этом порядке.
Трехфазные токи IU, IV и IW, детектированные детекторами 13, 14 и 15 тока, вводятся в блок 20 определения состояния тока. Блок 20 определения состояния тока отслеживает состояния детектированных трехфазных токов IU, IV и IW и выводит результат мониторинга в качестве сигнала FD состояния тока, служащего в качестве сигнала определения посредством конфигурации, которая будет описана позже, показанной на фиг. 6. Сигнал FD состояния тока выводится в логический блок 30 стробирующего сигнала и в блок 40A управления контактором. Сигнал FD состояния тока также выводится в качестве команды OV разряда в схему 18 разряда.
Конфигурация логического блока 30 стробирующего сигнала
Логический блок 30 стробирующего сигнала включает в себя схему-защелку 31, логическую схему НЕ (NOT) 32 и логическую схему И (AND) 33 с двумя входами. Сигнал FD состояния тока подается на контакт S установки схемы-защелки 31. Сигнал RST сброса, сформированный высокоуровневым устройством (не показано), подается на контакт R сброса схемы-защелки 31. Уровень выходного сигнала, удерживаемый на выходном контакте Q схемы-защелки 31, инвертируется логической схемой НЕ 32, чтобы стать одним входным сигналом логической схемы И 33. Другим входным сигналом логической схемы И 33 является базовый стробирующий сигнал GC, сформированный внешним высокоуровневым устройством (не показано). Выходной сигнал логической схемы И 33 является стробирующим сигналом GS в инвертор 12.
Базовый стробирующий сигнал GC - это двоичный управляющий сигнал для определения состояний включения или выключения шести переключающих элементов в инверторе 12. Базовый стробирующий сигнал GC формируется во внешнем высокоуровневом устройстве (не показано) посредством способа векторного управления или т.п., чтобы получать крутящий момент или число оборотов электродвигателя 6 переменного тока, требуемое при ускорении или торможении электрического транспортного средства.
Работа логического блока 30 стробирующего сигнала
Когда сигнал FD состояния тока имеет низкий уровень (далее в данном документе "L-уровень"), который является выключенным состоянием, выходной сигнал логической схемы НЕ 32 имеет высокий уровень (далее в данном документе "H-уровень"), который является включенным состоянием. Логическая схема И 33, таким образом, выводит логическое значение основного стробирующего сигнала GC в качестве стробирующего сигнала GS. Инвертор 12 затем включает или выключает шесть переключающих элементов предварительно определенным образом.
Когда сигнал FD состояния тока изменяется с L-уровня на H-уровень, выходной сигнал логической схемы НЕ 32 становится сигналом L-уровня. Соответственно, логическая схема И 33 выводит стробирующий сигнал GS L-уровня, несмотря на логическое состояние базового стробирующего сигнала GC. Инвертор 12 затем выключает шесть переключающих элементов.
Т.е., когда сигнал FD состояния тока один раз изменился с L-уровня на H-уровень, схема-защелка 31 удерживает H-уровень. Соответственно, L-уровень (выключенное состояние) стробирующего сигнала GS сохраняется, несмотря на логическое состояние базового стробирующего сигнала GC. Для того чтобы опять управлять включением-выключением переключающих элементов, высокоуровневому устройству (не показано) необходимо сформировать сигнал RST сброса, чтобы освободить схему-защелку 31, так что стробирующий сигнал GS, соответствующий логическому состоянию базового стробирующего сигнала GC, выводится.
Конфигурация блока 40A управления контактором
Блок 40A управления контактором включает в себя логические схемы НЕ 41 и 42, схему 43 элемента временной задержки (ONTD), логическую схему И (AND) 44 с двумя входами, логическую схему ИЛИ (OR) 45 с двумя входами и схему-защелку 46. Базовая команда MKCO замыкания контактора, сформированная высокоуровневым устройством (не показано), вводится в логическую схему НЕ 42 и на контакт S установки схемы-защелки 46. Сигнал FD состояния тока из блока 20 управления состоянием тока вводится в логическую схему НЕ 41.
Схема 43 элемента временной задержки задерживает базовую команду MKCO замыкания контактора, которая инвертируется логической схемой НЕ 42, в течение установленного времени и выводит команду MKCO на один входной контакт логической схемы ИЛИ 45. Логическая схема И 44 логически умножает базовую команду MKCO замыкания контактора, которая инвертирована логической схемой НЕ 42, и сигнал FD состояния тока, который инвертирован логической схемой НЕ 41, и выводит результат операции на другой входной контакт логической схемы ИЛИ 45. Выходной сигнал логической схемы ИЛИ 45 вводится на контакт R сброса схемы-защелки 46. Уровень сигнала, удерживаемый на выходном контакте Q схемы-защелки 46, предоставляется как команда MKC замыкания контактора отключающему контактору 16 электродвигателя.
Базовая команда MKCO замыкания контактора - это двоичный управляющий сигнал для предоставления инструкций блоку 17A управления, чтобы управлять отключающим контактором 16 электродвигателя, чтобы тот был замкнут во время работы электродвигателя 6 переменного тока, и управлять отключающим контактором 16 электродвигателя, чтобы тот был разомкнут, когда работа электродвигателя 6 переменного тока остановлена или когда неисправность происходит в инверторе 12.
Работа блока 40A управления контактором
Когда сигнал FD состояния тока имеет L-уровень, выходной сигнал логической схемы НЕ 41 имеет H-уровень. При этом схема-защелка 46 сбрасывается и выводит команду MKC замыкания контактора, которая становится включенной (H-уровень) или выключенной (L-уровень), синхронно с включением (H-уровень) или выключением (L-уровень) базовой команды MKCO замыкания контактора.
Когда сигнал FD состояния тока изменяется с L-уровня на H-уровень, выходной сигнал логической схемы НЕ 41 становится сигналом L-уровня. Когда базовая команда MKCO замыкания контактора имеет H-уровень при таких обстоятельствах, схема-защелка 46 выводит команду MKC замыкания контактора H-уровня. Однако, когда базовая команда MKCO замыкания контактора изменяется на L-уровень, в то время как выходной сигнал логической схемы НЕ 41 становится сигналом H-уровня, схема-защелка 46 не сбрасывается до тех пор, пока не пройдет установленное время в схеме 43 элемента временной задержки.
Т.е., когда сигнал FD состояния тока изменяется с L-уровня на H-уровень, схема-защелка 46 удерживает H-уровень до тех пор, пока не истечет установленное время в схеме 43 элемента временной задержки, даже если базовая команда MKCO закрытия контактора изменилась на L-уровень. Команде MKC закрытия контактора, таким образом, запрещается становиться выключенной (L-уровень). Согласно этому случаю, схема-защелка 46 сбрасывается выходным сигналом логической схемы И 44, после того как сигнал FD состояния тока изменился с H-уровня на L-уровень, так что команда MKC замыкания контактора становится выключенной (L-уровень).
Кроме того, когда сигнал FD состояния тока все еще имеет H-уровень, схема-защелка 46 сбрасывается, когда истечет установленное время в схеме 43 элемента временной задержки, после того как базовая команда MKCO замыкания контактора изменилась на L-уровень. Таким образом, команда MKC замыкания контактора становится выключенной (L-уровень). Следовательно, когда сигнал FD состояния тока продолжает оставаться на H-уровне ошибочно из-за какого-либо случая, команда MKC замыкания контактора может принудительно становиться выключенной.
Конфигурация и операции блока 20 определения состояния тока описываются далее со ссылкой на фиг. 6.
Конфигурация блока 20 определения состояния тока
Как показано на фиг. 6, блок 20 определения состояния тока включает в себя логический блок 25U детектирования U-фазы, логический блок 25V детектирования V-фазы, логический блок 25W детектирования W-фазы и блок 27 определения. Детектированные трехфазные токи IU, IV и IW вводятся в соответствующий логический блок 25U детектирования U-фазы, логический блок 25V детектирования V-фазы и логический блок 25W детектирования W-фазы. Сигнал FD состояния тока выводится из блока 27 определения, в который выходные сигналы соответствующих логических блоков детектирования вводятся параллельно.
Эти три логических блока детектирования имеют одинаковую конфигурацию, т.е. показанную в логическом блоке 25U детектирования U-фазы. Логический блок 25U детектирования U-фазы объясняется ниже в качестве типового.
Логический блок 25U детектирования U-фазы включает в себя блок 21 детектирования состояния точки перехода тока через нуль, блок 22 детектирования состояния пикового значения тока и блок 23 детектирования состояния действующего значения тока, в каждый из которых параллельно вводится ток IU U-фазы. Логический блок 25V детектирования V-фазы и логический блок 25W детектирования W-фазы имеют ту же конфигурацию.
Блок 21 детектирования состояния точки перехода тока через нуль включает в себя блок 21a детектирования точки перехода тока через нуль, блок 21b колебания, счетчик 21c и компаратор 21d. Блок 21 детектирования состояния точки перехода тока через нуль формирует и выводит сигнал NZU состояния точки перехода тока через нуль на основе введенного тока IU U-фазы. Блок 22 детектирования состояния пикового значения тока включает в себя блок 22a детектирования пикового значения тока и компаратор 22b. Блок 22 детектирования состояния пикового значения тока формирует и выводит сигнал MXU состояния пикового значения тока на основе введенного тока IU U-фазы. Блок 23 детектирования состояния действующего значения тока включает в себя блок 23a детектирования действующего значения тока и компаратор 23b. Блок 23 детектирования состояния действующего значения тока формирует и выводит сигнал RMU состояния действующего значения тока на основе введенного тока IU U-фазы.
Работа логического блока 25U детектирования U-фазы
Сначала, в блоке 21 детектирования состояния точки перехода тока через нуль, блок 21a детектирования точки перехода тока через нуль сравнивает введенный ток IU U-фазы с нулем и выводит сигнал RST сброса счетчика в счетчик 21c каждый раз, когда ток U-фазы пересекает нуль. Счетчик 21c считает с помощью тактового импульса CLK, выводимого из блока 21b колебания в предварительно определенном периоде и выводит свое посчитанное значение CNT в компаратор 21d. Компаратор 21d сравнивает посчитанное значение CNT с первым установленным значением SET. Когда посчитанное значение CNT превышает первое установленное значение SET1, компаратор определяет, что точка перехода тока через нуль не сформирована, и делает сигнал NZU состояния точки перехода тока через нуль включенным (H-уровень). Когда вводится сигнал RST сброса, описанный выше, счетчик 21c сбрасывается, и посчитанное значение CNT становится первоначальным значением, таким как нуль.
Когда инвертор 12 работает нормально, ток IU U-фазы имеет синусоидальную форму волны, регулярно формирующую пересечения с нулем. Посчитанное значение CNT счетчика 21c, таким образом, сбрасывается в предварительно определенное значение, т.е. возвращается в нуль сигналом RST сброса счетчика, формирующимся синхронно с пересечением нуля. Такие последовательности операций повторяются. В таком случае, посчитанное значение CNT счетчика 21c не превышает первого установленного значения SET1, и сигнал NZU состояния точки перехода тока через нуль все еще является выключенным (L-уровень).
Между тем, когда неисправность возникает в инверторе 12 и ток IU U-фазы смещается, так что пересечения с нулем не существует, сигнал RST сброса счетчика синхронно с пересечением нуля не формируется. Тогда посчитанное значение CNT счетчика 21c продолжает увеличиваться. Посчитанное значение CNT счетчика 21c, таким образом, превышает первое установленное значение SET1, так что сигнал NZU состояния точки перехода тока через нуль становится включенным (H-уровень).
Первое установленное значение SET1 предпочтительно устанавливается с тем, чтобы не детектироваться по ошибке, когда электродвигатель 6 переменного тока вращается с низкой скоростью (низкой частотой). Когда число оборотов электродвигателя 6 переменного тока уменьшается, частота основной гармоники тока уменьшается соответственно, и, таким образом, ее период увеличивается. Соответственно, время между пересечениями перехода тока через нуль увеличивается.
Таким образом, первое установленное значение SET1 предпочтительно изменяется в зависимости от частоты вращения электродвигателя 6 переменного тока и частоты основной гармоники тока возбуждения электродвигателя 6 переменного тока. Когда электродвигатель 6 переменного тока работает на очень низкой скорости, вывод сигнала NZU состояния точки перехода тока через нуль предпочтительно маскируется, чтобы предотвращать вывод сигнала состояния точки перехода тока через нуль по ошибке.
Далее, в блоке 22 детектирования состояния пикового значения тока, блок 22a детектирования пикового значения тока детектирует максимальное значение величины введенного тока IU U-фазы и выводит величину в качестве сигнала MX в компаратор 22b. Компаратор 22b сравнивает введенный сигнал MX со вторым установленным значением SET2. Когда сигнал MX превышает второе установленное значение SET2, компаратор 22b определяет, что пиковое значение тока является превышающим, и делает сигнал MXU состояния пикового значения тока включенным (H-уровень). Второе установленное значение SET2 предпочтительно устанавливается, чтобы немного превышать максимальный ток, который обычно формируется электродвигателем 6 переменного тока, когда инвертор 12 находится в нормальном состоянии, так что ошибочное детектирование предотвращается.
Когда инвертор 12 находится в нормальном состоянии, величина тока IU U-фазы не является превышающей, и сигнал MX величины тока IU ниже, чем второе установленное значение SET2. Сигнал MXU состояния пикового значения тока, таким образом, является выключенным (L-уровень).
Между тем, когда возникает неисправность в инверторе 12, и пиковое значение тока IU U-фазы является чрезмерным, как показано на фиг. 3, сигнал MX амплитуды превышает второе установленное значение SET2. Таким образом, сигнал MXU состояния пикового значения тока становится включенным (H-уровень).
Далее, в блоке 23 детектирования состояния действующего значения тока, блок 23a детектирования действующего значения тока детектирует действующее значение введенного тока IU U-фазы и выводит величину в компаратор 23b как сигнал RM амплитуды. Компаратор 23b сравнивает введенный сигнал RM с третьим установленным значением SET3. Компаратор 23b определяет, что действующее значение тока является чрезмерным, когда сигнал RM превышает третье установленное значение SET3, и делает сигнал RMU состояния действующего значения тока включенным (H-уровень). Чтобы предотвращать ошибочное детектирование, третье установленное значение SET3 предпочтительно устанавливается так, чтобы превышать немного максимальный ток, обычно формируемый в электродвигателе 6 переменного тока, когда инвертор 12 функционирует нормально.
Когда инвертор 12 нормально функционирует, действующее значение тока IU U-фазы не является чрезмерным, и сигнал RM амплитуды ниже, чем третье установленное значение SET3. Сигнал RMU состояния действующего значения тока, таким образом, является выключенным (L-уровень).
Между тем, когда возникает неисправность в инверторе 12, и действующее значение тока IU U-фазы является чрезмерным, как показано на фиг. 3, сигнал RM амплитуды превышает третье установленное значение SET3. В таком случае сигнал RMU состояния действующего значения тока становится включенным (H-уровень).
Относительно V-фазы и W-фазы, такая же операция выполняется в логическом блоке 25V детектирования V-фазы и в логическом блоке 25W детектирования W-фазы тем же образом, что и описано выше. Т.е. логический блок 25V детектирования V-фазы формирует сигнал NZV состояния точки перехода тока через нуль, сигнал MXV состояния пикового значения тока и сигнал RMV состояния действующего значения тока на основе тока IV V-фазы. Логический блок 25W детектирования W-фазы формирует сигнал NZW состояния точки перехода тока через нуль, сигнал MXW состояния пикового значения тока и сигнал RMW состояния действующего значения тока на основе тока IW W-фазы.
Результирующие сигналы NZU, MXU, RMU, NZV, MXV, RMV, NZW, MXW и RMW вводятся в блок 27 определения параллельно. Когда какой-либо из этих сигналов включен (H-уровень), блок 27 определения делает сигнал FD состояния тока включенным (H-уровень), чтобы указывать возникновение неисправности. Когда все эти сигналы затем становятся выключенными (L-уровень), сигнал FD состояния тока делается выключенным (L-уровень), чтобы указывать нормальное состояние. Когда инвертор 12 нормально функционирует, сигнал FD состояния тока остается выключенным (L-уровень).
Согласно такой конфигурации блок 17A управления всегда понимает состояния фазных токов IU, IV и IW, и когда возникает неисправность, делает стробирующий сигнал GS выключенным (L-уровень). Дополнительно, блок 17A управления может выдавать инструкцию размыкания отключающему контактору 16 электродвигателя, даже если базовая команда MKCO замыкания контактора является выключенной (L-уровень), когда ток находится в состоянии, подходящем для прерывания, т.е., когда нулевая точка формируется в токе, а его пиковое значение и его действующее значение меньше, чем предварительно определенные значения.
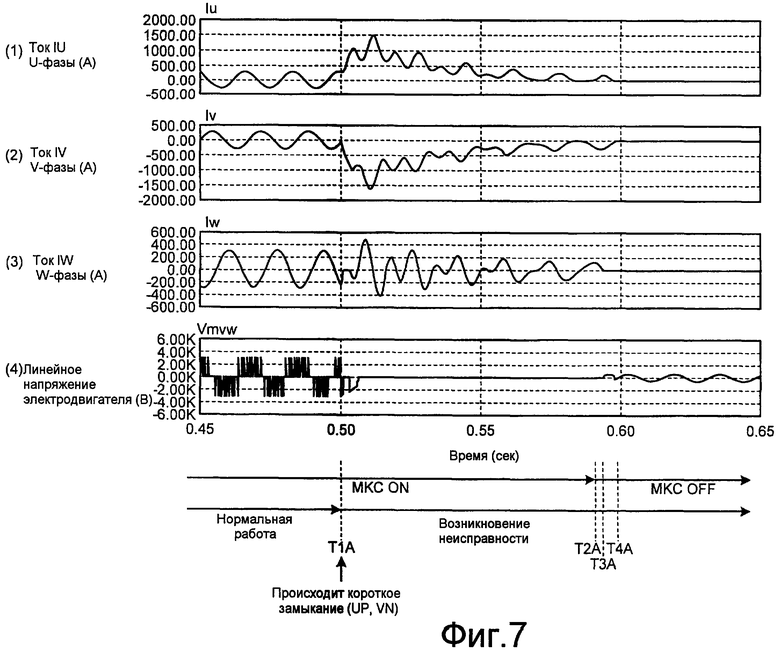
Операция управления, выполняемая блоком 17A управления с помощью конфигурации, описанной выше, когда возникает неисправность, объясняется далее со ссылкой на фиг. 7. Фиг. 7 - это диаграмма формы волны, объясняющая операцию управления первого варианта осуществления, в котором ток прерывается посредством формирования точки перехода тока через нуль в фазе, не имеющей точки перехода тока через нуль, когда возникает неисправность, показанная на фиг. 3.
На Фиг. 7 изображены формы с (1) по (3) волны тока соответствующих фаз и форма (4) волны линейного напряжения между V-фазой и W-фазой электродвигателя 6 переменного тока. Эти формы волны находятся в состоянии, когда короткое замыкание происходит в элементе UP верхнего плеча U-фазы и элементе VN нижнего плеча V-фазы, а все остальные переключающие элементы (VP, WP, UN и WN) выключены, как на фиг. 3.
На фиг. 7, время T1A указывает время, когда короткое замыкание происходит в элементе UP верхнего плеча U-фазы и элементе VN нижнего плеча V-фазы. Элемент UP верхнего плеча U-фазы и элемент VN нижнего плеча V-фазы нормально работают до времени T1A и работают в неисправном состоянии после времени T1A. Отключающий контактор 16 электродвигателя замкнут до времени T2A после времени T1A, поскольку команда MKC замыкания контактора включена (H-уровень). Команда MKC замыкания контактора становится выключенной (L-уровень) в момент T2A, так что отключающий контактор 16 электродвигателя размыкается. Как показано на фиг. 7, время T2A, когда отключающий контактор 16 электродвигателя размыкается, значительно позже, чем время T2B, согласно связанной методике, показанной на фиг. 3.
Перед временем T1A, когда короткое замыкание происходит в элементе UP верхнего плеча U-фазы и элементе VN нижнего плеча V-фазы, все переключающие элементы в инверторе 12 являются нормальными, и электродвигатель 6 переменного тока приводится в действие с частотой вращения, равной 63 Гц. Обычная точка перехода тока через нуль появляется в формах (1)-(3) волны тока соответствующих фаз. Нормальная форма волны положительно-отрицательного напряжения появляется в форме (3) волны линейного напряжения между V-фазой и W-фазой электродвигателя 6 переменного тока.
Короткое замыкание происходит в момент T1A в элементе UP верхнего плеча U-фазы и элементе VN нижнего плеча V-фазы, в то время как электродвигатель 6 переменного тока приводится в действие с частотой вращения, равной 63 Гц. Остальные переключающие элементы (VP, WP, UN и WN), управляются таким образом, чтобы быть выключенными. Ток IU U-фазы значительно смещается в отрицательную сторону, как показано формой (1) волны. Ток IV V-фазы значительно смещается в отрицательную сторону, как показано формой (2) волны. Формы (1) и (2) волн не имеют какой-либо точки перехода тока через нуль. Ток IW W-фазы показывает асимметричное изменение, которое показано формой (3) волны; однако точка перехода тока через нуль существует. Причина, по которой получаются эти формы волн, та же, что и описанная со ссылкой на фиг. 3.
Когда короткое замыкание происходит в момент T1A, высокоуровневое устройство (не показано), которое детектировало неисправность, размыкает контактор 11 для отключения подачи электропитания непосредственно после момента T1A, как описано со ссылкой на фиг. 3. Также, высокоуровневое устройство включает схему 18 разряда, чтобы разряжать электрические заряды в конденсаторе 19 фильтра для того, чтобы предотвратить приложение напряжения постоянного тока к электродвигателю 6 переменного тока. Высокоуровневое устройство (не показано) также делает базовую команду MKCO замыкания контактора выключенной (L-уровень), чтобы предотвратить протекание тока от электродвигателя 6 переменного тока к инвертору 12.
Блок 17A управления согласно первому варианту осуществления удерживает включенное состояние (H-уровень) команды MKC замыкания контактора даже после того, как базовая команда MKCO замыкания контактора становится выключенной (L-уровень). В то время как включенное состояние команды MKC замыкания контактора удерживается, контактор 11 для отключения подачи электропитания размыкается, и конденсатор 19 фильтра разряжается посредством схемы 18 разряда, так что приложение напряжения постоянного тока к электродвигателю 6 переменного тока устраняется.
Таким образом, как показано формами (1)-(3) волн, ток IU U-фазы и ток IV V-фазы ослабевают, так что точки перехода тока через нуль формируются в токе IU U-фазы, токе IV V-фазы и токе IW W-фазы. Во время (время T2A), когда пиковое значение тока и действующее значение тока меньше, чем предварительно определенные значения, команда MKC замыкания контактора делается выключенной (L-уровень). Таким образом, замыкающая катушка отключающего контактора 16 электродвигателя не возбуждается и обесточивается.
Таким образом, главный контакт отключающего контактора 16 электродвигателя размыкается в момент T3A непосредственно после момента T2A. Ток IW W-фазы, таким образом, прерывается первым в точке перехода тока через нуль. Ток IV V-фазы и ток IU U-фазы затем прерываются в своих точках перехода тока через нуль в этом порядке. Трехфазные токи прерваны в момент T4A.
С помощью этой операции, когда ток IW W-фазы прерывается в точке перехода тока через нуль в момент T3A, избыточное напряжение не формируется в линейном напряжении электродвигателя 6 переменного тока посредством вышеописанной операции, как показано формой (4) волны. Соответственно, изоляция электродвигателя 6 переменного тока и основных схем со стороны электродвигателя переменного тока, предусмотренных дальше по течению тока, чем отключающий контактор 16 электродвигателя (например, отключающий контактор 16 электродвигателя и проводник UM U-фазы со стороны электродвигателя, проводник VM V-фазы со стороны электродвигателя и проводник WM W-фазы со стороны электродвигателя, соединяющие отключающий контактор 16 электродвигателя с электродвигателем 6 переменного тока), не нарушается, и повреждение приводного контроллера 10A электродвигателя переменного тока может быть предотвращено.
Поскольку главный контакт отключающего контактора 16 электродвигателя размыкается после того, как точки перехода тока через нуль сформированы во всех фазах, время, когда электрическая дуга возникает между контактами отключающего контактора 16 электродвигателя, является коротким, т.е. от момента T2A до момента T4A. В отличие от случая связанной методики, показанной на фиг. 3, появление электрической дуги на длительное время (от момента T2B до момента T4B) может быть предотвращено, и, таким образом, повреждение отключающего контактора 16 электродвигателя, вызываемое выделяемым теплом, может быть предотвращено. Поскольку повреждение окружающей изоляции, вызванное газом электрической дуги, может быть предотвращено, короткие замыкания в отключающем контакторе 16 электродвигателя и периферийных основных схемах могут быть предотвращены.
Понятно, что, даже когда отключающий контактор 16 (фиг. 7) электродвигателя остается закрытым после момента T1A, когда происходит короткое замыкание, ток IU U-фазы, ток IV V-фазы и ток IW W-фазы имеют временную большую амплитуду непосредственно после момента T1A; однако их амплитуды уменьшаются после этого посредством разряда конденсатора 19 фильтра, что приводит в результате к формированию точек перехода тока через нуль в трех фазах.
Поскольку отключающий контактор 16 электродвигателя остается замкнутым после времени T1A, ток короткого замыкания не может быть прерван быстро. Это выглядит противоположно первоначальной цели, которую обеспечивает отключающий контактор 16 электродвигателя. Даже когда отключающий контактор 16 электродвигателя остается замкнутым, избыточный ток не протекает непрерывно. Повреждение короткозамкнутых частей может не увеличиться. Наоборот, избыточное напряжение, сформированное, когда отключающий контактор 16 электродвигателя размыкается, может быть пресечено. Т.е. конфигурация блока 17A управления, описанная выше, грамотно использует характеристики фазного тока. Конечно, контактор 11 для отключения подачи электропитания должен быть разомкнут, и конденсатор 19 фильтра должен разряжаться схемой 18 разряда, прежде чем отключающий контактор 16 электродвигателя разомкнется.
Как описано выше, наблюдается множество составляющих тока IU U-фазы, т.е. существование точки перехода тока через нуль, состояние пикового значения и состояние действующего значения. С их помощью, даже когда из-за неисправности формируется усложненная и искривленная форма волны тока из синусоидальной волны, состояние ненормальности тока может быть достоверно изучено. По меньшей мере, одно из присутствия точки перехода тока через нуль, состояния пикового значения и состояния действующего значения может наблюдаться. Однако, когда наблюдается только состояние действующего значения тока, например, форма волны тока, чье пиковое значение является большим, но чье действующее значение является маленьким из-за неисправности, не может быть задетектирована.
Предположим случай, когда сигнал FD состояния тока сохраняет включенное состояние (H-уровень) в ситуации, когда ненормальность тока IU U-фазы и тока IV V-фазы не пропадает из-за того, что электрические заряды конденсатора 19 фильтра не разряжаются из-за отказа схемы 18 разряда и контактора 11 для отключения подачи электропитания. В таком случае, команда MKC замыкания контактора может быть принудительно сделана выключенной, после того как установленное время задержки схемы 43 элемента временной задержки истечет, посредством операции схемы 43 ONTD и логической схемы 45 ИЛИ, показанных на фиг. 5. Следовательно, непрерывное формирование короткозамкнутых цепей, включающих в себя электродвигатель 6 переменного тока, может быть предотвращено.
Как описано выше, когда ток повреждения, в котором фаза, в которой точка перехода тока через нуль не формируется, и фаза, в которой точка перехода тока через нуль формируется, присутствуют одновременно, протекает между инвертором 12 и электродвигателем 6 переменного тока, формирование избыточного напряжения между линиями электродвигателя 6 переменного тока и между контактами отключающего контактора 16 электродвигателя может быть предотвращено, и формирование непрерывной электрической дуги между контактами отключающего контактора электродвигателя может быть предотвращено, несмотря на тип неисправности, возникшей в первом варианте осуществления. Возможно обеспечить приводной контроллер для электродвигателя переменного тока, в котором изоляция катушек в электродвигателе, отключающий контактор электродвигателя и кабели, соединяющие отключающий контактор электродвигателя с электродвигателем, не повреждаются, и отключающий контактор электродвигателя не повреждается электрической дугой между контактами отключающего контактора электродвигателя, несмотря на тип возникшей неисправности.
Второй вариант осуществления
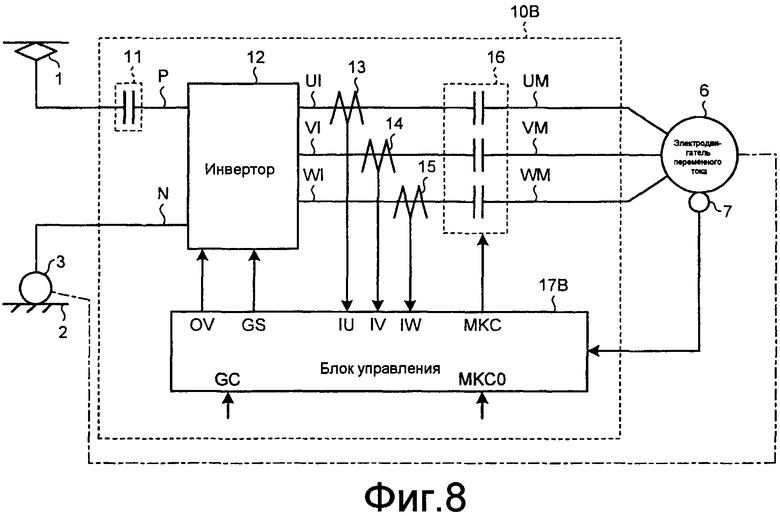
На Фиг. 8 показана структурная схема примера конфигурации приводного контроллера для электродвигателя переменного тока согласно второму варианту осуществления настоящего изобретения. На фиг. 8 похожие ссылочные номера обозначают компоненты, похожие на показанные на фиг. 1 (первый вариант осуществления). Части, относящиеся ко второму варианту осуществления, главным образом, объясняются ниже.
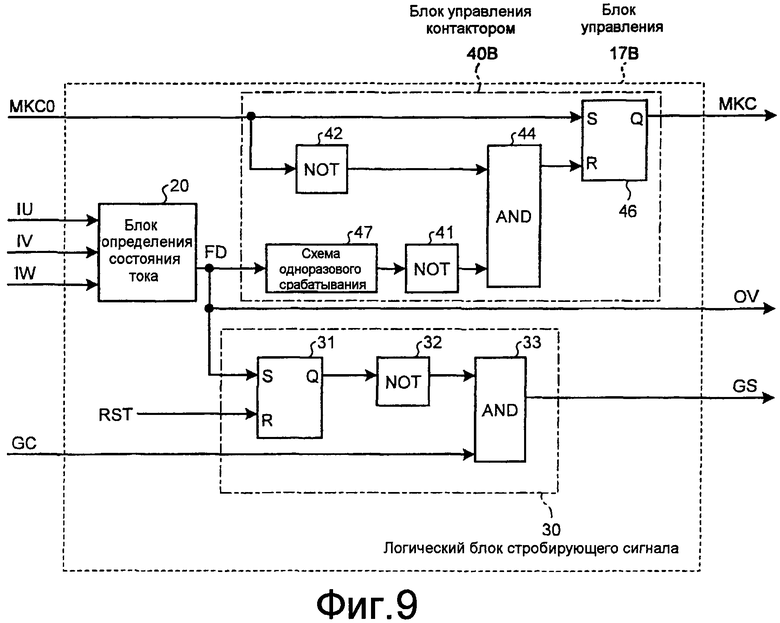
Как показано на фиг. 8, согласно приводному контроллеру 10B электродвигателя переменного тока второго варианта осуществления, блок 17B управления предусмотрен вместо блока 17A управления в конфигурации, показанной на фиг. 1 (первый вариант осуществления). Блок 17B управления имеет, например, конфигурацию, показанную на фиг. 9.
Конфигурация и операции блока 17B управления объясняются ниже со ссылкой на фиг. 9. На фиг. 9 похожие ссылочные номера обозначают компоненты, похожие на показанные на фиг. 5 (первый вариант осуществления). Части, относящиеся ко второму варианту осуществления, главным образом, объясняются ниже.
Как показано на фиг. 9, блок 17B управления сконфигурирован так, что предусмотрен блок 40B управления контактором вместо блока 40A управления контактором в конфигурации на фиг. 5 (первый вариант осуществления). В блоке 40B управления контактором схема 47 одноразового срабатывания предусмотрена во входном каскаде логической схемы НЕ 41, схема 43 элемента временной задержки и логическая схема ИЛИ 45 исключены, а выходной сигнал логической схемы И 44 непосредственно подается на контакт R сброса схемы-защелки 46 в блоке 40A управления контактором. Соответственно, работа блока 40B управления контактором объясняется как работа блока 17B управления.
Работа блока 40B управления контактором
Когда сигнал FD состояния тока имеет L-уровень, выходной сигнал логической схемы НЕ 41 имеет H-уровень. Схема-защелка 46, таким образом, сбрасывается и выводит команду MKC замыкания контактора, которая становится включенной (H-уровень) или выключенной (L-уровень) синхронно с включением (H-уровень) или выключением (L-уровень) базовой командой MKCO замыкания контактора.
Когда сигнал FD состояния тока изменяется с L-уровня на H-уровень, выходной сигнал схемы 47 одноразового срабатывания становится включенным (H-уровень) на предварительно определенное установленное время, а выходной сигнал логической схемы НЕ 41 становится L-уровнем на предварительно определенное установленное время. Соответственно, схема-защелка 46 не сбрасывается.
Т.е., когда сигнал FD состояния тока изменяется с L-уровня на H-уровень, команда MKC замыкания контактора не становится выключенной (L-уровень) в течение предварительно определенного времени, во время которого выходной сигнал схемы 47 одноразового срабатывания включен (H-уровень), даже если базовая команда MKCO замыкания контактора становится выключенной (L-уровень). Когда выходной сигнал схемы 47 одноразового срабатывания становится выключенным (L-уровень), выходной сигнал логической схемы НЕ 41 становится H-уровнем. Схема-защелка 46, таким образом, сбрасывается, и команда MKC замыкания контактора становится выключенной (L-уровень).
Период времени, в течение которого схема 47 одноразового срабатывания включена (H-уровень), предпочтительно вычисляется и устанавливается заранее посредством моделирования времени, до того как ненормальность тока исчезнет после неисправности в инверторе 12. В частности, проходит около 100 мс согласно примеру форм волн, показанному на фиг. 7.
Такая конфигурация предоставляет возможность конфигурирования функции, что и в первом варианте осуществления, посредством меньшего количества логических процессов.
Среди функциональных элементов блока 17A управления, показанного в первом варианте осуществления, и блока 17B управления, показанного во втором варианте осуществления, блок 20 определения состояния тока и блоки 40A и 40B управления контактором могут быть встроены в отключающий контактор 16 электродвигателя.
Механизм задержки может быть предусмотрен в отключающем контакторе 16 электродвигателя, чтобы размыкать главный его контакт, после того как предварительно определенное время задержки истечет, когда команда MKC закрытия контактора, введенная блоками 17A и 17B управления, становится выключенной (L-уровень).
Такой механизм задержки может предотвращать приложение избыточного напряжения к электродвигателю 6 переменного тока, поскольку предварительно определенное время задержки может быть обеспечено, прежде чем главный контакт отключающего контактора 16 электродвигателя разомкнется. Эта конфигурация полезна, когда неисправность происходит, например, в управляемом источнике энергии (не показан), подающим электропитание в блоки 17A и 17B управления, и, таким образом, блоки 17A и 17B управления не могут выполнять предварительно определенные логические процессы, описанные в первом и втором вариантах осуществления, что приводит в результате к тому, что команда MKC замыкания контактора становится выключенной (L-уровень).
Излишне упоминать, что управляемый источник энергии, который подает электропитание в блоки 17A и 17B управления, предпочтительно имеет функцию резервирования, способную подавать электроэнергию в блоки 17A и 17B управления в течение некоторого времени во время неисправности.
Согласно управлению, выполняемому блоками 17A и 17B управления с конфигурацией, описанной выше во время неисправности, формирование избыточного напряжения может быть предотвращено посредством размыкания отключающего контактора 16 электродвигателя. Когда установленное время в схеме 43 элемента временной задержки и схеме 47 одноразового срабатывания превышается или когда неисправность происходит в блоках 17A и 17B управления в состоянии, когда сигнал FD состояния тока сохраняется включенным (H-уровень) по какой-либо причине, отключающий контактор 16 электродвигателя возможно размыкается, несмотря на состояние тока. Чтобы предохранять детекторы 13, 14 и 15 тока и другой детектор напряжения (не показан) от повреждения даже в вышеуказанном состоянии, они предпочтительно предусмотрены на проводнике UI U-фазы со стороны инвертора, проводнике VI V-фазы со стороны инвертора и проводнике WI W-фазы со стороны инвертора.
Причина в том, что, как описано выше, существует возможность того, что изоляция детекторов 13, 14 и 15 тока и другого детектора напряжения нарушается и повреждается избыточным напряжением, которое формируется, когда отключающий контактор 16 электродвигателя управляется, чтобы размыкаться во время неисправности инвертора 12, в проводнике UM U-фазы со стороны электродвигателя, проводнике VM V-фазы со стороны электродвигателя и проводнике WM W-фазы со стороны электродвигателя. Между тем, избыточное напряжение не формируется в проводнике UI U-фазы со стороны инвертора, проводнике VI V-фазы со стороны инвертора и проводнике WI W-фазы со стороны инвертора в таком случае, и, таким образом, детекторы 13, 14 и 15 тока и другие детекторы напряжения не повреждаются.
Конфигурации, описанные в вышеуказанных вариантах осуществления, являются просто примерами содержимого настоящего изобретения, и они могут быть объединены с другими известными технологиями. Излишне упоминать, что эти конфигурации могут быть модифицированы без отступления от цели настоящего изобретения, как, например, удаление части конфигураций.
Например, в настоящей спецификации пояснена конфигурация приема напряжения постоянного тока от токоснимателя 1 и непосредственный ввод напряжения через контактор 11 для отключения подачи электропитания в инвертор 12. Также возможно предоставить конфигурацию приема напряжения переменного тока от токоснимателя 1, ввода напряжения переменного тока через контактор 11 для отключения подачи электропитания в схему преобразователя, которая преобразует напряжение переменного тока в напряжение постоянного тока, и ввода напряжения постоянного тока в качестве выходного сигнала схемы преобразователя в инвертор 12. Такая конфигурация подходит для электрических транспортных средств для секций электрификации переменного тока.
В то время как настоящая спецификация описывает настоящее изобретение как изобретение, применяемое к приводному контроллеру для электродвигателя переменного тока, встроенного в электрическое транспортное средство, область применения настоящего изобретения не ограничивается этим. Излишне упоминать, что изобретение может быть применено к другим системам возбуждения синхронного двигателя, таким как связанные с ними технологии, включающие в себя электромобили.
Промышленная применимость
Как описано выше, приводной контроллер для электродвигателя переменного тока согласно настоящему изобретению полезен в качестве приводного контроллера для электродвигателя переменного тока. Даже когда фаза, в которой точка перехода тока через нуль не формируется, и фаза, в которой точка перехода тока через нуль формируется, присутствуют одновременно в токе повреждения, который протекает между инвертором и электродвигателем, изоляция катушек электродвигателя, отключающего контактора электродвигателя и кабелей, соединяющих отключающий контактор электродвигателя с электродвигателем, не нарушается, и отключающий контактор электродвигателя не повреждается электрической дугой между контактами отключающего контактора электродвигателя, несмотря на тип возникшей неисправности. Настоящее изобретение особенно полезно, когда электродвигатель переменного тока, встроенный в электрическое транспортное средство, является синхронным электродвигателем с постоянными магнитами.
Пояснения к буквенным или числовым ссылкам
1 - Токосниматель
2 - Рельс
3 - Колесо
6 - Электродвигатель переменного тока
7 - Детектор вращения
10A, 10B - Приводной контроллер электродвигателя переменного тока
11 - Контактор для отключения подачи электропитания
12 - Инвертор
13, 14, 15 - Детектор тока
16 - Отключающий контактор электродвигателя
17A, 17B - Блок управления
18 - Схема разряда
19 - Конденсатор фильтра
20 - Блок определения состояния тока
21 - Блок детектирования состояния точки перехода тока через нуль
21a - Блок детектирования точки перехода тока через нуль
21b - Блок колебания
21c - Счетчик
21d - Компаратор
22 - Блок детектирования состояния пикового значения тока
22a - Блок детектирования пикового значения тока
22b - Компаратор
23 - Блок детектирования состояния действующего значения тока
23a - Блок детектирования действующего значения тока
23b - Компаратор
25U - Логический блок детектирования U-фазы
25V - Логический блок детектирования V-фазы
25W - Логический блок детектирования W-фазы
27 - Блок определения
30 - Логический блок стробирующего сигнала
31 - Схема-защелка
33 - Логическая схема НЕ (НЕ)
33 - Логическая схема И (И)
40A, 40B - Блок управления контактором
41, 42 - Логическая схема НЕ (НЕ)
43 - Схема элемента временной задержки (ONTD)
44 - Логическая схема И (И)
45 - Логическая схема ИЛИ (ИЛИ)
46 - Схема-защелка
47 - Схема одноразового срабатывания
P - Проводник положительной стороны
N - Проводник отрицательной стороны
UI - Проводник U-фазы на стороне инвертора
VI - Проводник U-фазы на стороне инвертора
WI - Проводник W-фазы на стороне инвертора
UM - Проводник U-фазы на стороне электродвигателя
VM - Проводник V-фазы на стороне электродвигателя
WM - Проводник W-фазы на стороне электродвигателя
UP - Элемент верхнего плеча U-фазы
VP - Элемент верхнего плеча V-фазы
WP - элемент верхнего плеча W-фазы
UN - элемент нижнего плеча U-фазы
VN - элемент нижнего плеча V-фазы
WN - элемент нижнего плеча W-фазы
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2008 |
|
RU2442274C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ ЭЛЕКТРОДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА | 2009 |
|
RU2507658C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ | 2006 |
|
RU2401504C1 |
| ИНВЕРТОРНОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИНВЕРТОРОМ | 2011 |
|
RU2533167C1 |
| СИЛОВОЕ ПРЕОБРАЗОВАТЕЛЬНОЕ УСТРОЙСТВО | 2009 |
|
RU2466040C1 |
| КОНТРОЛЛЕР ВРАЩАЮЩЕЙСЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2008 |
|
RU2431916C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2009 |
|
RU2481693C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАРЯДКОЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2420849C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ВРАЩАЮЩЕЙСЯ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2009 |
|
RU2491692C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2447572C2 |



Изобретение относится к области электротехники и может быть использовано для возбуждения синхронного электродвигателя с постоянными магнитами, встроенного в электрическое транспортное средство. Техническим результатом является создание приводного контроллера (10А; 10В) для электродвигателя переменного тока, который может предотвращать формирование избыточного напряжения между линиями электродвигателя (6) и между контактами отключающего контактора электродвигателя и непрерывную электрическую дугу между контактами отключающего контактора электродвигателя, несмотря на тип возникшей неисправности, даже когда фаза, в которой точка перехода тока через нуль не формируется, и фаза, в которой точка перехода тока через нуль формируется, присутствуют одновременно в токе повреждения, который протекает между инвертором (12) и электродвигателем. Блок (17А) управления сконфигурирован, чтобы размыкать отключающий контактор (16) электродвигателя не в момент времени, когда состояние детектированного тока определяется как ненормальное, а в момент времени, когда состояние тока определяется как нормальное, даже когда базовая команда МКСО замыкания контактора становится выключающей (L-уровень). 6 н. и 7 з.п. ф-лы, 9 ил.
1. Приводной контроллер (10А; 10В) для электродвигателя переменного тока, содержащий:
инвертор (12), который включает в себя множество переключающих элементов (UP, VP, WP, VN, UN, WN) с управляемым включением-выключением и преобразует напряжение постоянного тока в напряжение переменного тока с произвольной частотой для возбуждения электродвигателя переменного тока (6); переключатель (16) на стороне электродвигателя, подключенный между инвертором (12) и электродвигателем переменного тока (6); детектор (13, 14, 15) электрической величины, который детектирует электрическую величину на выходной стороне инвертора (12); блок (17А; 17В) управления, который управляет включением-выключением переключающих элементов (UP, VP, WN, VN, UN, WN) в инверторе (12) и управляет переключателем (16) на стороне электродвигателя, чтобы размыкать и замыкать его на основе, по меньшей мере, тока, детектированного детектором (13, 14, 15) электрической величины; и переключатель (11) на стороне источника электропитания, предусмотренный между стороной ввода постоянного тока инвертора (12) и источником (1) электропитания, при этом блок управления (17А; 17В) содержит:
блок (20) определения состояния тока, который формирует сигнал определения, определяющий находится ли ток, детектированный детектором (13, 14, 15) электрической величины, в ненормальном состоянии, и
блок (40А; 40В) управления контактором, который управляет на основе сигнала определения моментом фактической выдачи инструкции верхнего уровня, которая сформирована для переключателя (16) на стороне электродвигателя для размыкания переключателя (16) на стороне электродвигателя, и
переключатель (11) со стороны источника электропитания выполнен с возможностью размыкания так, чтобы отсоединять сторону ввода постоянного тока инвертора (12) от источника (1) электропитания прежде, чем переключатель (16) на стороне электродвигателя разомкнется.
2. Приводной контроллер (10А; 10В) для электродвигателя переменного тока, содержащий: инвертор (12), который включает в себя множество переключающих элементов (UP, VP, WP, VN, UN, WN) с управляемым включением-выключением и преобразует напряжение постоянного тока в напряжение переменного тока с произвольной частотой, для возбуждения электродвигателя переменного тока (6); переключатель (16) на стороне электродвигателя, подключенный между инвертором (12) и электродвигателем переменного тока (6); детектор (13, 14, 15) электрической величины, который детектирует электрическую величину на выходной стороне инвертора (12);
блок (17А; 17В) управления, который управляет включением-выключением переключающих элементов (UP, VP, WP, VN, UN, WN) в инверторе (12) и управляет переключателем (16) на стороне электродвигателя, чтобы размыкать и замыкать его на основе, по меньшей мере, тока, детектированного детектором (13, 14, 15) электрической величины; и
схему (18) разряда, подключенную параллельно с конденсатором (19), предусмотренным между проводником положительной стороны и проводником отрицательной стороны инвертора (12), к которому приложено напряжение постоянного тока, при этом
блок управления (17А; 17В) содержит:
блок (20) определения состояния тока, который формирует сигнал, определяющий находится ли ток, детектированный детектором (13, 14, 15) электрической величины, в ненормальном состоянии, и
блок (40А; 40В) управления контактором, который управляет на основе сигнала определения моментом фактической выдачи инструкции верхнего уровня, которая сформирована для переключателя (16) на стороне электродвигателя для размыкания переключателя (16) на стороне электродвигателя, и
схему (18) разряда, выполненную с возможностью управления, чтобы разряжать электрические заряды конденсатора (19) прежде, чем переключатель (16) со стороны электродвигателя разомкнется.
3. Приводной контроллер (10А; 10В) для электродвигателя переменного тока по п.1 или 2, в котором
блок (17А; 17В) управления включает в себя логический блок (30) стробирующего сигнала, который формирует стробирующий сигнал, не только управляющий включением-выключением, но также управляющий выключением переключающих элементов (UP, VP, WP, VN, UN, WN) на основе сигнала определения.
4. Приводной контроллер (10А; 10В) для электродвигателя переменного тока по п.1 или 2, в котором
блок (20) определения состояния тока сравнивает, по меньшей мере, один из: показатель, относящийся к существованию пересечения нуля детектированного тока, показатель, относящийся к пиковому значению детектированного тока, и показатель, относящийся к действующему значению детектированного тока, с соответствующим установленным значением и формирует сигнал определения на основе результата сравнения.
5. Приводной контроллер (10А; 10В) для электродвигателя переменного тока по п.1 или 2, в котором
блок (20) определения состояния тока определяет, что ток находится в ненормальном состоянии, и формирует сигнал определения, указывающий ненормальность тока, когда показатель, относящийся к существованию пересечения нуля любого из детектированных трехфазных токов, превышает первое установленное значение, поскольку пересечение нуля не существует, когда показатель, относящийся к пиковому значению детектированного тока, превышает второе установленное значение, или когда показатель, относящийся к действующему значению детектированного тока, превышает третье установленное значение.
6. Приводной контроллер (10А; 10В) для электродвигателя переменного тока по п.1 или 2, в котором
блок (20) определения состояния тока определяет, что ток находится в нормальном состоянии, и формирует сигнал определения, указывающий нормальное состояние тока, когда показатель, относящийся к существованию пересечения нуля во всех детектированных трехфазных токах, ниже, чем первое установленное значение, поскольку точка перехода тока через нуль существует, показатель, относящийся к пиковому значению детектированного тока, ниже, чем второе установленное значение, и показатель, относящийся к действующему значению детектированного тока, ниже, чем третье установленное значение.
7. Приводной контроллер (10А; 10В) для электродвигателя переменного тока по п.1 или 2, в котором
блок (40А; 40В) управления контактором не управляет размыканием переключателя (16) на стороне электродвигателя в момент, когда блок (20) определения состояния тока определяет, что детектированный ток находится в ненормальном состоянии.
8. Приводной контроллер (10А; 10В) для электродвигателя переменного тока по п.1 или 2, в котором
блок (40А; 40В) управления контактором управляет задержкой времени размыкания переключателя (16) на стороне электродвигателя от момента времени, когда блок (20) определения состояния тока определяет, что детектированный ток находится в ненормальном состоянии, до момента времени, когда состояние меняется на состояние, когда состояние является подходящим для размыкания переключателя (16) на стороне электродвигателя, или когда оценивается, что изменение было сделано.
9. Приводной контроллер (10А; 10В) для электродвигателя переменного тока по п.1 или 2, в котором
детектор (13, 14, 15) электрической величины предусмотрен в схеме, которая предусмотрена между инвертором (12) и переключателем (16) на стороне электродвигателя.
10. Приводной контроллер (10А; 10В) для электродвигателя переменного тока, содержащий:
инвертор (12), который включает в себя множество переключающих элементов (UP, VP, WP, VN, UN, WN) с управляемым включением-выключением и преобразует напряжение постоянного тока в напряжение переменного тока с произвольной частотой для возбуждения электродвигателя переменного тока (6); переключатель (16) на стороне электродвигателя, подключенный между инвертором (12) и электродвигателем переменного тока (6); детектор (13, 14, 15) электрической величины, который детектирует электрическую величину на выходной стороне инвертора (12); блок (17А; 17В) управления, который управляет включением-выключением переключающих элементов (UP, VP, WN, VN, UN, WN) в инверторе (12) и управляет переключателем (16) на стороне электродвигателя, чтобы размыкать и замыкать его на основе, по меньшей мере, тока, детектированного детектором (13, 14, 15) электрической величины, при этом
блок управления (17А; 17В) содержит:
блок (20) определения состояния тока, который формирует сигнал определения, определяющий, находится ли ток, детектированный детектором (13, 14, 15) электрической величины, в ненормальном состоянии, и
блок (40А; 40В) управления контактором, который управляет, на основе сигнала определения, моментом фактической выдачи инструкции верхнего уровня, которая сформирована для размыкания переключателя (16) на стороне электродвигателя переключателю (16) на стороне электродвигателя,
при этом блок (20) определения состояния тока определяет, что ток находится в ненормальном состоянии, и формирует сигнал определения, указывающий ненормальность тока, когда показатель, относящийся к существованию пересечения нуля любого из детектированных трехфазных токов, превышает первое установленное значение, поскольку пересечение нуля не существует, когда показатель, относящийся к пиковому значению детектированного тока, превышает второе установленное значение, или когда показатель, относящийся к действующему значению детектированного тока, превышает третье установленное значение.
11. Приводной контроллер (10А; 10В) для электродвигателя переменного тока, содержащий:
инвертор (12), который включает в себя множество переключающих элементов (UP, VP, WP, VN, UN, WN) с управляемым включением-выключением и преобразует напряжение постоянного тока в напряжение переменного тока с произвольной частотой, для возбуждения электродвигателя переменного тока (6); переключатель (16) на стороне электродвигателя, подключенный между инвертором (12) и электродвигателем переменного тока (6); детектор (13, 14, 15) электрической величины, который детектирует электрическую величину на выходной стороне инвертора (12); и блок (17А; 17В) управления, который управляет включением-выключением переключающих элементов (UP, VP, WN, VN, UN, WN) в инверторе (12) и управляет переключателем (16) на стороне электродвигателя, чтобы размыкать и замыкать его на основе, по меньшей мере, тока, детектированного детектором (13, 14, 15) электрической величины, при этом
блок управления (17А; 17В) содержит:
блок (20) определения состояния тока, который формирует сигнал определения, определяющий, находится ли ток, детектированный детектором (13, 14, 15) электрической величины, в ненормальном состоянии, и
блок (40А; 40В) управления контактором, который управляет на основе сигнала определения моментом фактической выдачи инструкции верхнего уровня, которая сформирована для размыкания переключателя (16) на стороне электродвигателя переключателю (16) на стороне электродвигателя,
при этом блок (20) определения состояния тока определяет, что ток находится в нормальном состоянии, и формирует сигнал определения, указывающий нормальное состояние тока, когда показатель, относящийся к существованию пересечения нуля во всех детектированных трехфазных токах, ниже, чем первое установленное значение, поскольку точка перехода тока через нуль существует, показатель, относящийся к пиковому значению детектированного тока, ниже, чем второе установленное значение, и показатель, относящийся к действующему значению детектированного тока, ниже, чем третье установленное значение.
12. Приводной контроллер (10А; 10В) для электродвигателя переменного тока, содержащий:
инвертор (12), который включает в себя множество переключающих элементов (UP, VP, WP, VN, UN, WN) с управляемым включением-выключением и преобразует напряжение постоянного тока в напряжение переменного тока с произвольной частотой, для возбуждения электродвигателя переменного тока (6); переключатель (16) на стороне электродвигателя, подключенный между инвертором (12) и электродвигателем переменного тока (6); детектор (13, 14, 15) электрической величины, который детектирует электрическую величину на выходной стороне инвертора (12); и блок (17А; 17В) управления, который управляет включением-выключением переключающих элементов (UP, VP, WN, VN, UN, WN) в инверторе (12) и управляет переключателем (16) на стороне электродвигателя, чтобы размыкать и замыкать его на основе, по меньшей мере, тока, детектированного детектором (13, 14, 15) электрической величины, при этом
блок управления (17А; 17В) содержит:
блок (20) определения состояния тока, который формирует сигнал определения, определяющий, находится ли ток, детектированный детектором (13, 14, 15) электрической величины, в ненормальном состоянии, и
блок (40А; 40В) управления контактором, который управляет на основе сигнала определения моментом фактической выдачи инструкции верхнего уровня, которая сформирована для размыкания переключателя (16) на стороне электродвигателя, переключателю (16) на стороне электродвигателя,
при этом блок (40А; 40В) управления контактором не управляет размыканием переключателя (16) на стороне электродвигателя в момент, когда блок (20) определения состояния тока определяет, что детектированный ток находится в ненормальном состоянии.
13. Приводной контроллер (10А; 10В) для электродвигателя переменного тока, содержащий:
инвертор (12), который включает в себя множество переключающих элементов (UP, VP, WP, VN, UN, WN) с управляемым включением-выключением и преобразует напряжение постоянного тока в напряжение переменного тока с произвольной частотой, для возбуждения электродвигателя переменного тока (6); переключатель (16) на стороне электродвигателя, подключенный между инвертором (12) и электродвигателем переменного тока (6); детектор (13, 14, 15) электрической величины, который детектирует электрическую величину на выходной стороне инвертора (12); и блок (17А; 17В) управления, который управляет включением-выключением переключающих элементов (UP, VP, WN, VN, UN, WN) в инверторе (12) и управляет переключателем (16) на стороне электродвигателя, чтобы размыкать и замыкать его на основе, по меньшей мере, тока, детектированного детектором (13, 14, 15) электрической величины, при этом
блок управления (17А; 17В) содержит:
блок (20) определения состояния тока, который формирует сигнал определения, определяющий находится ли ток, детектированный детектором (13, 14, 15) электрической величины, в ненормальном состоянии, и
блок (40А; 40В) управления контактором, который управляет на основе сигнала определения моментом фактической выдачи инструкции верхнего уровня, которая сформирована для размыкания переключателя (16) на стороне электродвигателя переключателю (16) на стороне электродвигателя,
при этом блок (40А; 40В) управления контактором, управляет задержкой времени размыкания переключателя (16) на стороне электродвигателя от момента времени, когда блок (20) определения состояния тока определяет, что детектированный ток находится в ненормальном состоянии, до момента времени, когда состояние меняется на состояние, подходящее для размыкания переключателя (16) на стороне электродвигателя, или когда оценивается, что изменение было сделано.
| RU 20504223 С1, 10.02.1996 | |||
| СТАНЦИЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2001 |
|
RU2219650C2 |
| Способ защиты тиристорного преобразователя частоты | 1991 |
|
SU1786589A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОПАДАНИЯ ФАЗЫ КОРОТКОГО ЗАМЫКАНИЯ И ВЕЛИЧИНЫ ТОКА ТРЕХФАЗНОЙ НАГРУЗКИ | 1990 |
|
SU1792214A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| 2- @ -(3-Сульфо-2-оксипропил)-амино @ -4-метилфенетол в качестве полупродукта для кислотных моноазокрасителей для полиамидного волокна | 1982 |
|
SU1131873A1 |

