Изобретение относится к приводному механизму для средневольтного автоматического выключателя или устройства автоматического повторного включения, содержащему по меньшей мере один подвижный контакт с контактным штоком, приводимый в действие с помощью электромагнитного привода или электропривода, и пружину, причем пружина расположена в кинематической цепи между приводом и подвижным контактом или контактным штоком, в соответствии с ограничительной частью п. 1 и 9 формулы изобретения.
В общем, для автоматических выключателей или устройств автоматического повторного включения, но особенно в приложениях, относящихся к обеспечению безопасности, требуется обеспечить, чтобы автоматический выключатель или устройство автоматического повторного включения действительно сработало, когда будет дана команда либо на замыкание, либо на размыкание. Обычно для автоматических выключателей выполняют контроль катушки – в данном случае, небольшой тестовый ток протекает через освобождающие катушки, чтобы гарантировать, что путь протекания тока не прерывается (нет обрыва провода катушки, нет обрыва кабеля, нет неплотного соединения и т. д.). Тогда оператор может быть уверен, что фактическая команда приведет в действие освобождающую катушку привода автоматического выключателя или устройства автоматического повторного включения, но при этом не факт, что привод действительно будет двигаться. Могут быть и другие неисправности между освобождающей катушкой и основным стержнем, такие как ослабление винтов или увеличенное трение.
Задача изобретения заключается в том, чтобы получить уточненный сигнал о реальном состоянии функциональной работоспособности привода.
Изобретение заключается в том, что узел, состоящий из подвижного контакта и привода подвижного контакта, дополнительно связан со средством детектирования активации микродвижения и со средством управления с обратной связью активацией микродвижения, чтобы регистрировать действительную подвижность и работоспособность привода подвижного контакта, не меняя само текущее положение переключателя.
Средство детектирования активации микродвижения может представлять собой, например, ползунковый резистор или любое другое устройство измерения положения. Как вариант, для детектирования микродвижения также можно применять датчик ускорения.
Как вариант, для детектирования характерного шума, который возникает, когда приводной механизм возвращается в исходное положение после микродвижения, можно применять акустический датчик. Такие датчики, как акустический датчик и датчик ускорения, не обязательно должны быть непосредственно связаны с приводом или с кинематической цепью. Характерный эффект шума или вибрации, возникающих в результате микродвижения, может быть детектирован в любом месте внутри автоматического выключателя или устройства автоматического повторного включения.
Как вариант, вместо отдельного датчика можно использовать противоэлектродвижущую силу приводного механизма. Противоэлектродвижущая сила представляет собой напряжение, измеряемое на контактах катушки приводного механизма. Это напряжение зависит от изменения магнитного потока в катушке приводного механизма вследствие изменения тока и изменения положения.
Во многих конструкциях автоматических выключателей и устройств автоматического повторного включения предусмотрен один привод для более чем одного контакта. Зачастую имеется три контакта для трехфазных систем переменного тока. Изобретение также работает с этими конструкциями и относится к ним.
Основная идея заключается в том, чтобы выполнить небольшое физическое перемещение привода автоматического выключателя, чтобы гарантировать, что привод является подвижным и не заблокирован. Так как положение автоматического выключателя – ВЫКЛ (разомкнуто) или ВКЛ (замкнуто) – не должно изменяться в результате такой проверки, то это движение должно быть по существу сравнительно небольшим по сравнению с номинальным ходом привода. Вследствие этого используют термин "микродвижение". Привод не должен перемещаться более чем на несколько миллиметров от положения ВКЛ или ВЫКЛ.
Если автоматический выключатель или устройство автоматического повторного включения находится в положении ВЫКЛ, то подвижный контакт, например, вакуумного выключателя будет следовать этому небольшому перемещению. Расстояние контакта соответственно уменьшится на короткое время в диапазоне нескольких миллисекунд. Так как это движение будет небольшим по сравнению с расстоянием контакта в положении ВЫКЛ, то изоляционные свойства вакуумного выключателя существенно не уменьшатся. Небольшое движение в диапазоне 1 мм можно сравнить с движением обратного хода, которое в любом случае может возникнуть в автоматических выключателях или устройствах автоматического повторного включения в конце операции размыкания.
Вследствие соотношений плеч рычагов, механического ослабления и отклонения ход привода и ход контакта или контактов могут быть разными. Важно ограничить перемещение контакта или контактов из положения ВЫКЛ так, чтобы предотвратить проблемы, связанные с диэлектриком. С помощью испытаний диэлектрика рекомендуется подтвердить, что уровни изоляции для автоматического выключателя или контактора также являются достаточными, когда контакт или контакты находятся на расстоянии около 1 мм от положения ВЫКЛ.
Если автоматический выключатель или устройство автоматического повторного включения находится в положении ВКЛ, то привод прижимает контактную пружину к подвижному контакту вакуумного выключателя и смещает контактную пружину обычно на несколько миллиметров. Поэтому небольшое микродвижение будет компенсировано удлинением контактной пружины, так что подвижный контакт не будет двигаться во время испытания. Очевидно, что контакты не будут размыкаться во время испытания. Удлинение контактной пружины или контактных пружин должно быть заметно меньше, чем обычный ход контактной пружины автоматического выключателя или устройства автоматического повторного включения, чтобы гарантировать, что контакт или контакты остаются замкнутыми с достаточным контактным усилием. Также здесь предполагается перемещение примерно на 1 мм.
В дополнительном предпочтительном варианте осуществления вышеупомянутое управление с обратной связью активацией микродвижений реализуется в сигнальном устройстве. Таким образом, эта функциональность может быть реализована также в модифицированной конструкции, если в автоматическом выключателе уже применена вышеупомянутая контактная пружина.
В дополнительном предпочтительном варианте осуществления амплитуда микродвижения составляет около 1 мм, если контакт находится в положении ВЫКЛ, а контактная пружина – в положении ВКЛ.
В еще одном предпочтительном варианте осуществления предложено, чтобы между штоком подвижного контакта и толкателем располагалась осевая контактная пружина.
С точки зрения функциональности это уже было описано в вышеупомянутых преимуществах.
В еще одном предпочтительном варианте осуществления предложено, чтобы в том же осевом направлении толкателя располагалась размыкающая пружина.
В дополнительном предпочтительном варианте осуществления предложено, чтобы датчик положения был механически соединен с подвижной частью привода. Таким образом, такое размещение датчика проще, чем его размещение рядом с контактами или непосредственно на контактном штоке.
В дополнительном предпочтительном варианте осуществления предложено, чтобы датчик ускорения был размещен где-то внутри автоматического выключателя или устройства автоматического повторного включения.
В дополнительном предпочтительном варианте осуществления предложено оценивать противоэлектродвижущую силу приводного механизма для детектирования микродвижений привода. Ее можно рассчитать в сигнальном устройстве, которое управляет процедурой микродвижения, без каких-либо дополнительных затрат. Тогда можно сэкономить на отдельном датчике.
Математическая модель приводного механизма или двигателя состоит в основном из резистора, катушки индуктивности и напряжения противоэлектродвижущей силы. Эта схема обычно подключена к источнику напряжения для подачи тока. Если модель известна, включая зависимости параметров в основном от тока и положения привода, то противоэлектродвижущая сила может быть определена путем сравнения источника напряжения и тока и его производных по времени.
В соответствии со способом работы приводного механизма средневольтного автоматического выключателя, содержащего по меньшей мере один подвижный контакт с контактным штоком, приводимый в действие контактным электромагнитным приводом или электроприводом, и пружину, причем пружина расположена в кинематической цепи между приводом и подвижным контактом или контактным штоком, изобретение заключается в том, что для регистрации фактической подвижности и работоспособности привода подвижного контакта без изменения самого фактического положения переключателя на привод подают сигнал активации микродвижения.
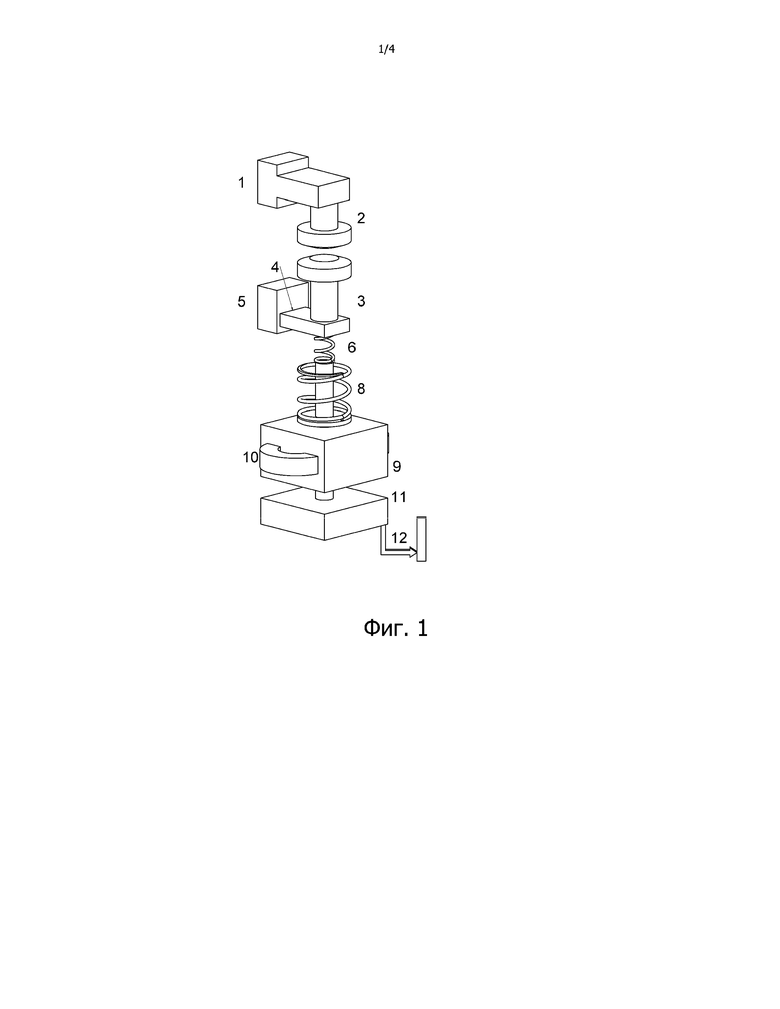
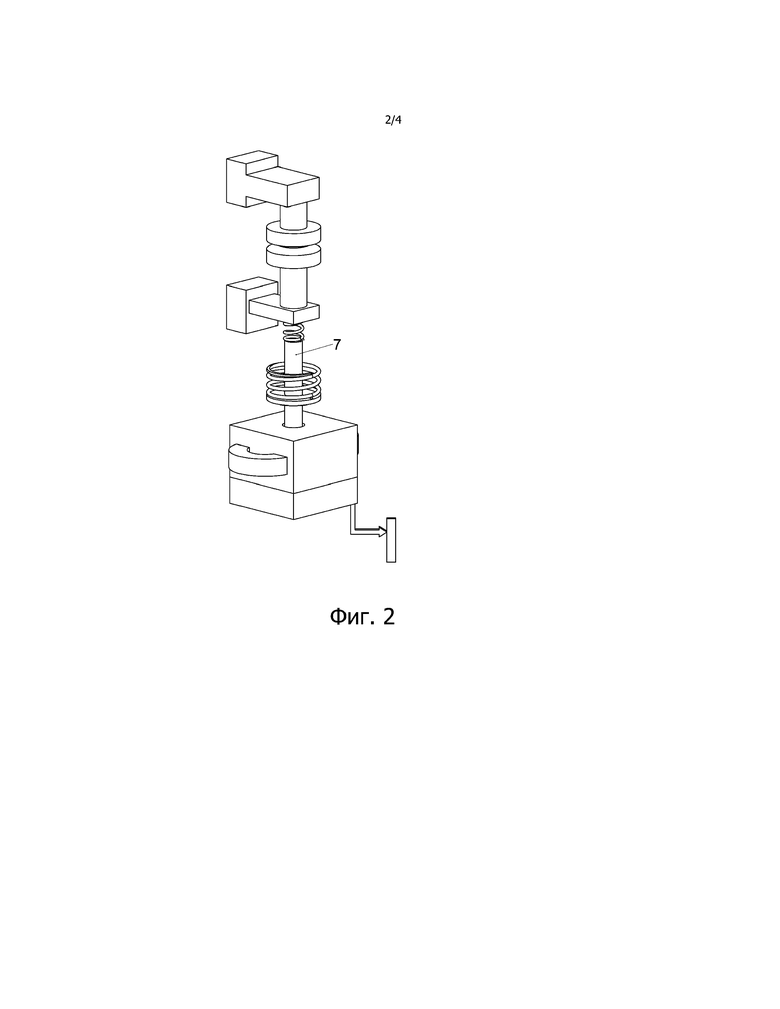
Рассматриваемый в этом документе контакт автоматического средневольтного выключателя или устройства автоматического повторного включения должен иметь следующую конструкцию, как в качестве примера показано на фиг. 1 (разомкнутый) и на фиг. 2 (замкнутый).
В положении ВЫКЛ автоматического выключателя или устройства автоматического повторного включения, как показано на фиг. 1, концепция микродвижения может быть реализована сравнительно легко. На катушку подается питание так же, как для стандартной операции замыкания. Как только детектировано начало движения привода, ток уменьшается до нуля и привод возвращается в разомкнутое положение под действием размыкающей пружины (пружин).
Еще один предпочтительный вариант осуществления способа заключается в том, что для микродвижения в положении ВЫКЛ используют только замыкающую катушку приводного механизма с двумя катушками, при этом сначала на приводной механизм с двумя катушками подают питание с положительным током, а затем на катушку подают отрицательный ток, чтобы удержать подвижную часть привода в положении ВЫКЛ или вернуть ее в положение ВЫКЛ.
Еще один предпочтительный вариант осуществления заключается в том, что для микродвижения в положении ВКЛ используют только замыкающую катушку приводного механизма с двумя катушками, при этом сначала небольшим отрицательным током в замыкающей катушке освобождают защелку привода, находящегося в положении ВКЛ, а затем защелку возвращают в исходное положение сильным положительным током.
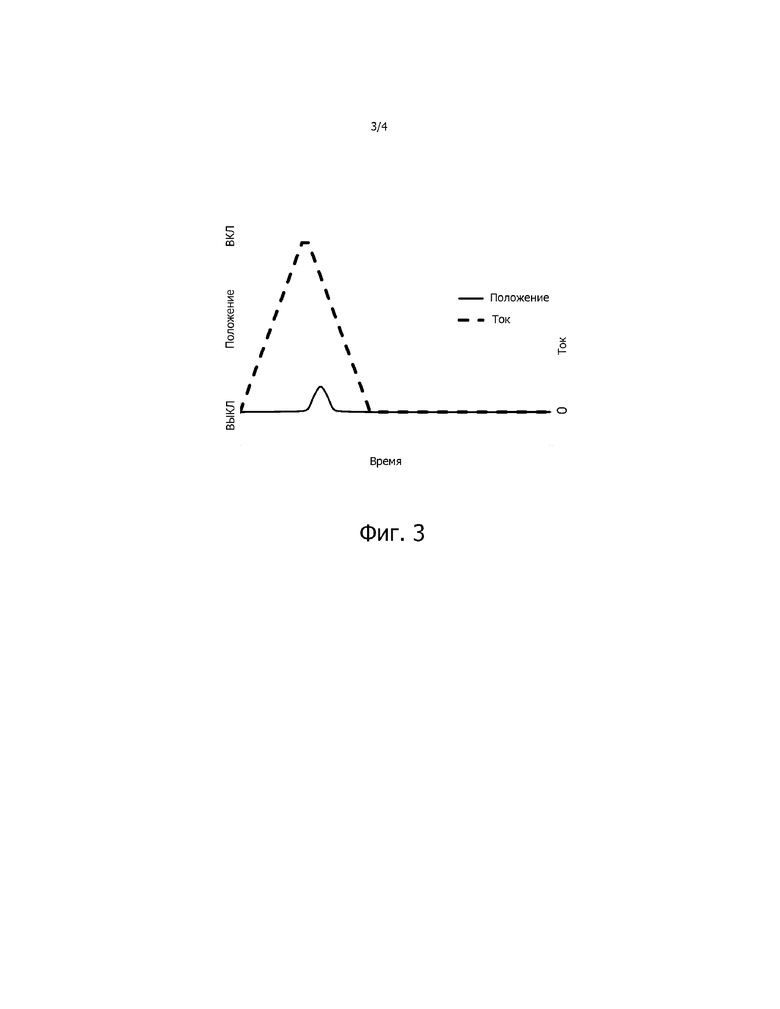
На фиг. 3 показаны общие кривые тока катушки и положения привода с течением времени. Ток начинает увеличиваться от 0 до определенного значения, например, после подключения катушки к напряжению питания. Положение привода – это положение ВЫКЛ. В случае, когда ток достигает определенного предварительно заданного уровня до начала движения, ток можно поддерживать постоянным, например, используя регулятор тока с широтно-импульсной модуляцией (ШИМ). Через некоторое время привод начнет перемещаться из положения ВЫКЛ в положение ВКЛ. Ток теперь уменьшается, например, путем изменения приводного напряжения. Из-за инерции движения и все еще существующей движущей силы привод продолжит свое движение в направлении положения ВКЛ в течение некоторого времени, но, так как ток уменьшается, и вследствие оказываемого размыкающей пружиной (пружинами) усилия, привод вернется в положение ВЫКЛ. Теперь цикл микродвижений в положении ВЫКЛ завершен; есть подтверждение того, что привод является подвижным.
Общая конструкция средневольтного автоматического выключателя или устройства автоматического повторного включения с вакуумными прерывателями включает в себя сравнительно сильные контактные пружины 6 между приводом и подвижным контактом вакуумного прерывателя. Эти пружины поддерживают операцию размыкания в начале. Кроме того, могут быть установлены дополнительные размыкающие пружины 8, чтобы поддерживать всю операцию размыкания. Тем не менее, магнитная фиксирующая сила приводного механизма станет значительно ниже, как только произойдет движение, то есть когда подвижная часть 11 привода отойдет от неподвижной части 9 привода. Риск для микродвижения в положении ВКЛ состоит в том, что эти пружины могут привести привод в ситуацию, когда силы размыкания (контактные пружины плюс пружины размыкания) превышают силу замыкания магнитного приводного механизма. Результатом может быть то, что движение окажется больше желаемого, при этом оно не может быть ограничено так, чтобы оставаться небольшим. Следовательно, стратегия для микродвижения в положении ВКЛ может быть другой.
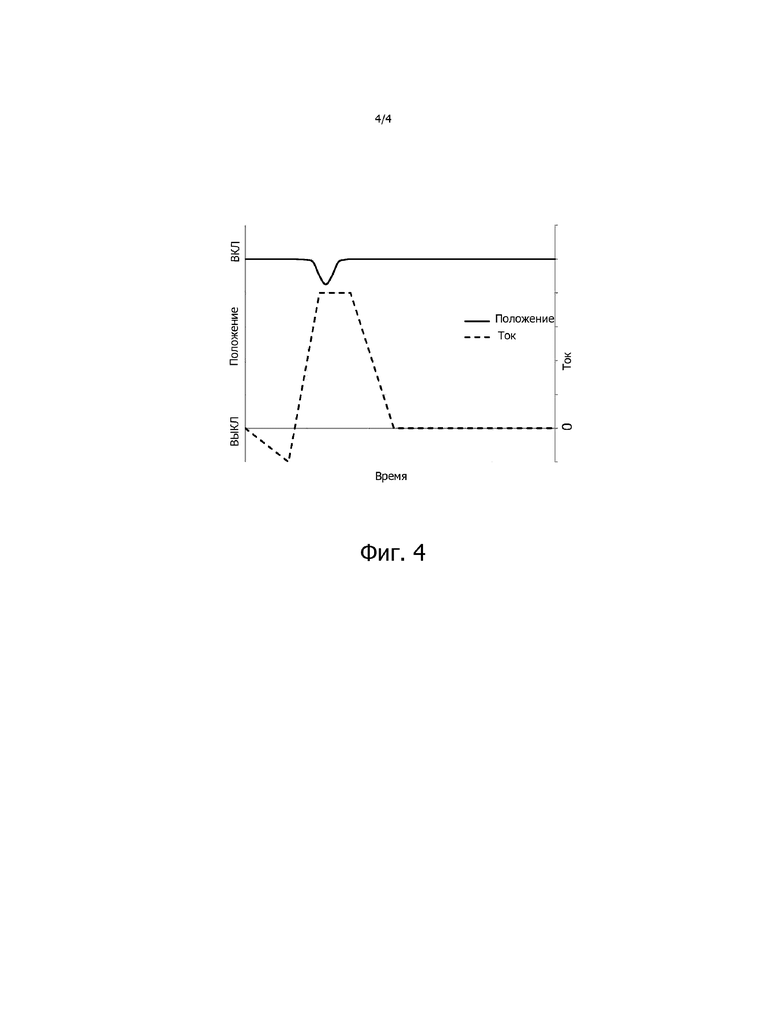
На фиг. 4 показаны кривые этой другой стратегии. В течение первого периода времени ток отрицателен, так как отрицательный ток используется в магнитных приводных механизмах с одной катушкой для уменьшения магнитной удерживающей силы и, таким образом, для запуска операции размыкания, которая затем проводится в основном под действием контактной пружины и размыкающей пружины. В зависимости от фактических сил всех задействованных частей привода может случиться так, что движение привода в действительности не будет микродвижением, оно может быть больше, чем заданное целевое значение, например больше 1 мм. Чтобы избежать этого большого движения, предлагаемая стратегия заключается в том, чтобы изменить направление тока до того, как движение будет обнаружено. Это создаст достаточное фиксирующее усилие, чтобы убедиться, что движение не превышает заданного целевого значения.
Теперь может случиться так, что изменение направления тока происходит настолько рано, что движения вообще не происходит. В этом случае контроллер должен повторить испытание с чуть более поздним изменением направления тока или с немного более высоким возбуждающим напряжением или током. Процедуру можно повторять до тех пор, пока не будет замечено микродвижение, или пока не будет достигнут определенный порог тока или приводного напряжения или времени подачи питания, что указывает на то, что привод неисправен, если он не перемещается при таком пороговом токе или пороговом напряжении при пороговом времени подачи питания.
Этот принцип также может быть использован для микродвижений в положении ВЫКЛ для выполнения более мелких движений. В зависимости от фактической конструкции магнитного привода также может быть необходимо использовать этот принцип для микродвижения в положении ВЫКЛ.
Испытание с микродвижением должно повторяться регулярно, например раз в час или раз в день.
Эти принципы также можно использовать для приводных механизмов с двумя катушками, как показано, например, в документе EP0721650. Вместо положительных и отрицательных токов в одной катушке ток в замыкающей катушке и ток в размыкающей катушке могут использоваться для получения желаемого движения привода.
В другом предпочтительном варианте осуществления для микродвижения в положении ВЫКЛ используют только замыкающую катушку приводного механизма с двумя катушками. Сначала на нее подают положительный ток. Затем на катушку подают отрицательный ток, чтобы удерживать подвижную часть привода в положении ВЫКЛ или вернуть ее в положение ВЫКЛ.
В другом предпочтительном варианте осуществления для микродвижения в положении ВКЛ используется только замыкающая катушка приводного механизма с двумя катушками. Защелка привода в положении ВКЛ сначала освобождается небольшим отрицательным током в замыкающей катушке. Затем защелка возвращается в исходное положение сильным положительным током. Это очень похоже на процедуру для приводных механизмов с одной катушкой.
Ссылочные позиции
1 верхний электрический контакт
2 неподвижный переключающий контакт
3 подвижный переключающий контакт
4 электрический контакт, скользящий или гибкий проводник
5 нижний электрический контакт
6 контактная пружина
7 толкатель
8 размыкающая пружина; верхний конец зафиксирован
9 неподвижная часть привода
10 катушка привода
11 подвижная часть привода
12 датчик положения
Использование: в области электротехники. Технический результат - повышение надежности срабатывания выключателя. Приводной механизм для средневольтного автоматического выключателя или устройства автоматического повторного включения содержит по меньшей мере один подвижный контакт с контактным штоком, приводимый в действие с помощью электромагнитного привода или электропривода, и пружину, причем пружина расположена в кинематической цепи между приводом и подвижным контактом или контактным штоком. Чтобы получить уточненный сигнал о действительном состоянии функциональной работоспособности привода, узел, состоящий из подвижного контакта (3) и привода (10) подвижного контакта, дополнительно снабжен средством детектирования активации микродвижения и средством управления с обратной связью активацией микродвижения, чтобы регистрировать действительную подвижность и работоспособность привода подвижного контакта, не меняя само текущее положение переключателя. 2 н. и 9 з.п. ф-лы, 4 ил.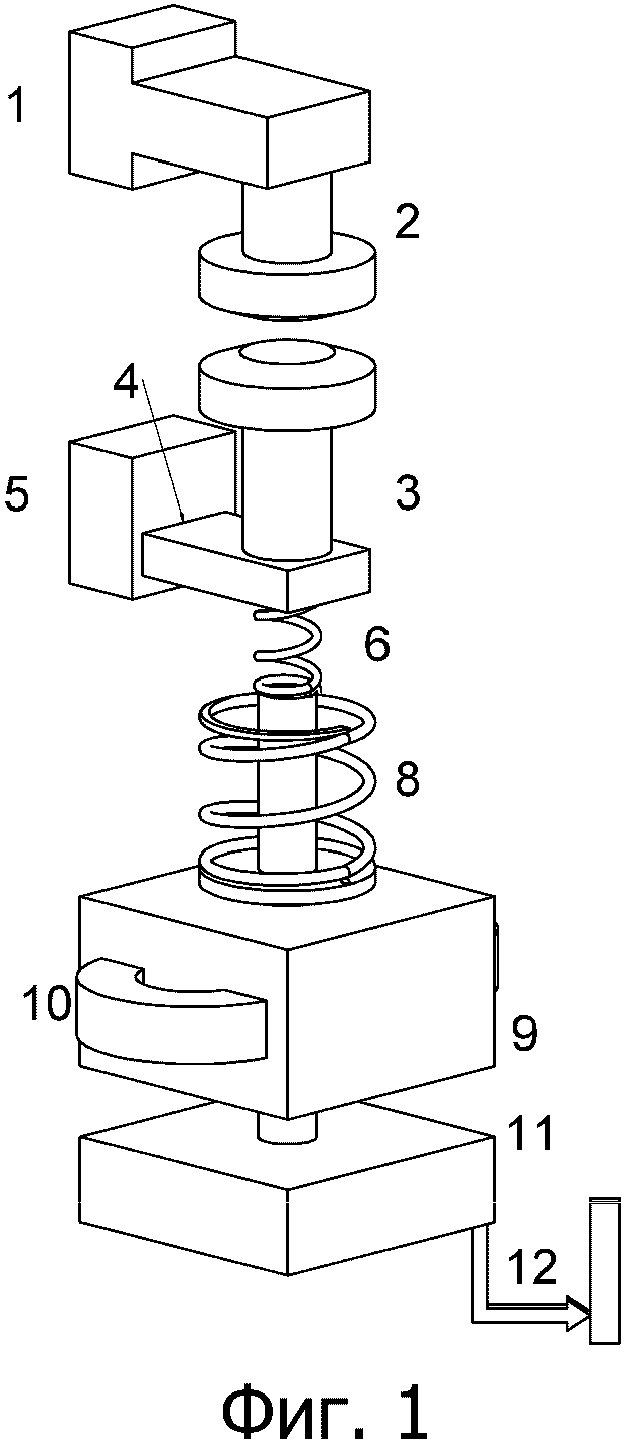
1. Приводной механизм для средневольтного автоматического выключателя или устройства автоматического повторного включения, содержащий по меньшей мере один подвижный контакт с контактным штоком, приводимый в действие с помощью электромагнитного привода или электропривода, и пружину, причем пружина расположена в кинематической цепи между приводом и подвижным контактом или контактным штоком,
при этом во время первого номинального хода подвижный контакт выполнен с возможностью перемещения в разомкнутое положение из замкнутого положения,
при этом во время второго номинального хода подвижный контакт выполнен с возможностью перемещения в замкнутое положение из разомкнутого положения,
при этом в замкнутом положении электромагнитный привод или электропривод выполнен с возможностью активации первого микродвижения так, что подвижный контакт имеет возможность перехода из замкнутого положения обратно в замкнутое положение, не переходя в разомкнутое положение,
при этом в разомкнутом положении электромагнитный привод или электропривод выполнен с возможностью активации второго микродвижения так, что подвижный контакт имеет возможность перехода из разомкнутого положения обратно в разомкнутое положение, не переходя в замкнутое положение,
при этом по меньшей мере один датчик выполнен с возможностью детектирования первого микродвижения и второго микродвижения, причем по меньшей мере один датчик содержит датчик положения, датчик ускорения, акустический датчик или датчик противоэлектродвижущей силы.
2. Приводной механизм по п. 1, в котором при активации первого микродвижения подвижный контакт выполнен с возможностью перемещения менее чем на несколько миллиметров из замкнутого положения и при активации второго микродвижения подвижный контакт выполнен с возможностью перемещения менее чем на несколько миллиметров из замкнутого положения.
3. Приводной механизм по п. 1 или 2, в котором амплитуда микродвижения составляет около 1 мм, если контакт находится в разомкнутом положении, а контактная пружина - в замкнутом положении.
4. Приводной механизм по любому из пп. 1-3, в котором между штоком подвижного контакта (3) и толкателем (7) расположена осевая контактная пружина (6).
5. Приводной механизм по п. 4, в котором размыкающая пружина (8) расположена в том же эффективном осевом направлении толкателя (7).
6. Приводной механизм по любому из пп. 1-5, в котором датчик (12) положения механически связан с подвижной частью привода в качестве средства детектирования микродвижения.
7. Приводной механизм по любому из пп. 1-6, в котором датчик ускорения соединен с приводом путем его расположения внутри или рядом с автоматическим выключателем или устройством автоматического повторного включения в качестве средства детектирования микродвижения.
8. Приводной механизм по любому из пп. 1-7, который выполнен с возможностью оценки противоэлектродвижущей силы привода для детектирования микродвижения.
9. Способ работы приводного механизма для средневольтного автоматического выключателя, содержащего по меньшей мере один подвижный контакт с контактным штоком, приводимый в действие с помощью контактного электромагнитного привода или электропривода, и пружину, причем пружина расположена в кинематической цепи между приводом и подвижным контактом или контактным штоком, при этом во время первого номинального хода подвижный контакт выполнен с возможностью перемещения в разомкнутое положение из замкнутого положения,
при этом во время второго номинального хода подвижный контакт выполнен с возможностью перемещения в замкнутое положение из разомкнутого положения,
при этом способ включает:
в замкнутом положении активацию электромагнитным приводом или электроприводом первого микродвижения так, что подвижный контакт имеет возможность перехода из замкнутого положения обратно в замкнутое положение, не переходя в разомкнутое положение,
в разомкнутом положении активацию электромагнитным приводом или электроприводом второго микродвижения так, что подвижный контакт имеет возможность перехода из разомкнутого положения обратно в разомкнутое положение, не переходя в замкнутое положение, и
детектирование по меньшей мере одним датчиком первого микродвижения и второго микродвижения, при этом по меньшей мере один датчик содержит датчик положения, датчик ускорения, акустический датчик или датчик противоэлектродвижущей силы.
10. Способ по п. 9, в котором в разомкнутом положении при активации второго микродвижения используют только замыкающую катушку приводного механизма с двумя катушками, при этом сначала на приводной механизм с двумя катушками подают питание с положительным током, а затем на катушку подают отрицательный ток, чтобы удержать подвижную часть привода в разомкнутом положении или вернуть ее в разомкнутое положение.
11. Способ по п. 9, в котором в замкнутом положении при активации первого микродвижения используют только замыкающую катушку приводного механизма с двумя катушками, при этом сначала небольшим отрицательным током в замыкающей катушке освобождают защелку привода, находящегося в положении ВКЛ, а затем защелку возвращают в исходное положение сильным положительным током.
| КЛАПАН (ВАРИАНТЫ) | 2004 |
|
RU2275541C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОДНОЙ МЕХАНИЗМ С МАГНИТНЫМ СЦЕПЛЕНИЕМ И УСТРОЙСТВО РАЗЪЕДИНЕНИЯ, СОДЕРЖАЩЕЕ ТАКОЙ ПРИВОДНОЙ МЕХАНИЗМ | 2010 |
|
RU2529884C2 |
| ВЫКЛЮЧАТЕЛЬ АВТОМАТИЧЕСКИЙ БЫСТРОДЕЙСТВУЮЩИЙ | 2009 |
|
RU2402096C1 |
| EP 3018678 A1, 11.05.2016. | |||

