ОБЛАСТЬ ТЕХНИКИ
Изложенное ниже относится в общем случае к улучшению данных изображения, такому как улучшение качества изображения (снижение шума) данных изображения при уменьшенной дозе, по существу, до такого же, что и качество изображения данных изображения при более высокой дозе, и находит конкретное применение в компьютерной томографии (КТ). Однако это применимо также к другим приложениям медицинской визуализации и к приложениям не медицинской визуализации.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Мультисрезовый сканер для компьютерной томографии (КТ) включает в себя рентгеновскую трубку, смонтированную на поворотном гентри, который поворачивается вокруг зоны обследования относительно продольной или z-оси. Рентгеновская трубка испускает излучение, которое проходит через зону обследования и находящийся в ней объект или субъект. Двухмерная детекторная матрица расположена на дуге окружности напротив зоны обследования от рентгеновской трубки. Детекторная матрица включает в себя множество рядов детекторов, которые выровнены по отношению друг к другу и проходят вдоль z-оси. Детекторы детектируют излучение, которое проходит через зону обследования и объект или субъект в ней, и генерируют характеризующие его проекционные данные. Реконструирующее устройство обрабатывает проекционные данные и реконструирует данные трехмерного (3D) объемного изображения, определяющие его. Данные объемного изображения обрабатываются, чтобы генерировать одно или более изображений зоны обследования, включающих в себя участок субъекта или объекта, находящегося в ней.
Печатные источники свидетельствуют о том, что порядка 68,7 млн. процедур компьютерной томографии было произведено в США в 2007 году. К сожалению, томографы для компьютерной томографии испускают ионизирующее излучение и, таким образом, подвергают пациента воздействию ионизирующего излучения. Доза излучения, воздействующего на пациента, зависит от многих факторов, включающих в себя, не ограничиваясь этим, ток трубки (мА), напряжение на трубке (кВ), уровень/время воздействия (для спирального сканирования), толщину и расстояние между срезами (для аксиального сканирования), число циклов сканирования при обследовании и построении пациента. Доза, воздействующая на пациента, может быть снижена за счет уменьшения тока трубки, напряжения на трубке и/или числа циклов сканирования, и/или увеличения уровня, толщины среза и/или расстояния между срезами. Однако шум изображения обратно пропорционален дозе излучения, и поэтому снижение дозы излучения не только уменьшает дозу, воздействующую на пациента, но также повышает шум изображения, который ухудшает качество изображения (например, разрешающую способность изображения), что может снизить диагностическую ценность процедуры.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Аспекты настоящей заявки направлены на вышеупомянутые и другие предметы обсуждения.
Согласно одному аспекту способ включает в себя этап, на котором генерируют улучшенные данные изображения на основе данных изображения при уменьшенной дозе и предварительно определенном пороговом уровне качества изображения, причем качество изображения улучшенных данных изображения, по существу, такое же, как качество изображения данных изображения при более высокой дозе.
Согласно другому аспекту, система включает в себя схему улучшения качества изображения, которая генерирует улучшенные данные изображения на основе данных изображения при уменьшенной дозе и предварительно определенного порогового уровня качества изображения, причем качество изображения улучшенных данных изображения, по существу, такое же, как качество изображения данных изображения при более высокой дозе.
Согласно другому аспекту, способ включает в себя этап, на котором определяют стандартное шумовое отклонение для данных изображения, первый набор выпадающих значений в данных изображения на основе стандартного шумового отклонения и глобального алгоритма, и распределение шума на основе набора невыпадающих значений, которые определяют на основе первого набора выпадающих значений.
Согласно другому аспекту, способ включает в себя этап, на котором подбирают одну или более моделей к данным изображения, идентифицируют модель из одной или более моделей как пригодную для удаления шума из данных изображения при сохранении структуры, представляющей сканируемый объект или субъект в данных изображения, и применяют эту идентифицированную модель для удаления шума из данных изображения и генерации данных изображения при пониженном шуме.
Согласно другому аспекту, способ включает в себя этап, на котором получают данные изображения при уменьшенной дозе, получают данные изображения при пониженном шуме, причем данные изображения при пониженном шуме генерируют на основе данных изображения при уменьшенной дозе или проекционных данных, используемых для генерации данных изображения при уменьшенной дозе, и генерируют данные изображения с улучшенным качеством изображения на основе данных изображения при уменьшенной дозе и данных изображения при пониженном шуме.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения изобретения со ссылками на сопроводительные чертежи, на которых:
Фиг.1 изображает систему визуализации и схему улучшения качества изображения.
Фиг.2 изображает пример схемы улучшения качества изображения, которая генерирует улучшенные данные изображения на основе данных изображения.
Фиг.3 изображает схему моделирования шума в схеме улучшения качества изображения.
Фиг.4 изображает схему удаления шума в схеме улучшения качества изображения.
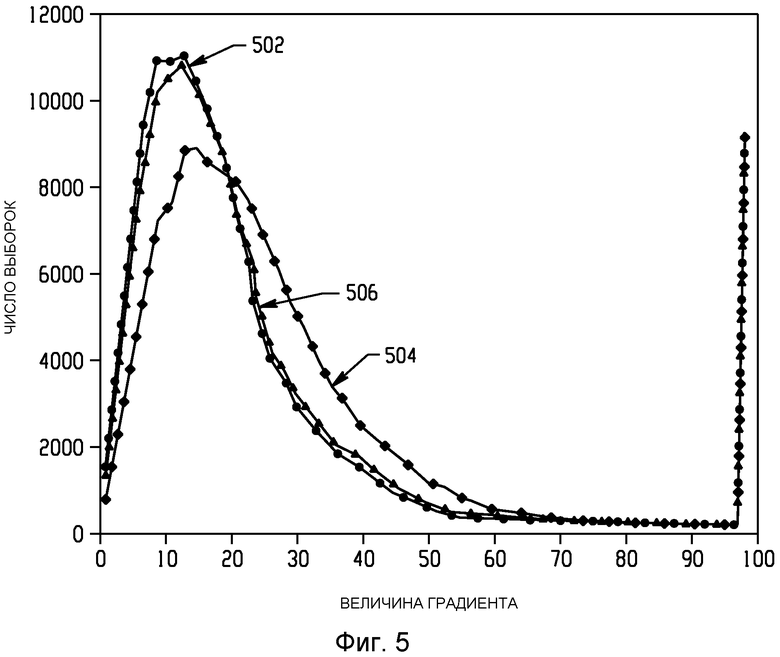
Фиг.5 изображает графическое представление кривых, определяющих величину градиента для полной дозы, пониженной дозы и пониженной дозы с улучшенными циклами сканирования.
Фиг.6 изображает пример схемы улучшения качества изображения, которая генерирует улучшенные данные изображения на основе проекционных данных.
Фиг.7-11 изображают различные способы.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Изложенное ниже относится в общем случае к улучшению или к снижению шума в данных изображения при уменьшенной дозе на основе предварительно определенного порогового уровня качества (шума) изображения, с тем, чтобы качество изображения для улучшенных данных изображения при уменьшенной дозе оставалось, по существу, таким же, что и качество изображения для данных изображения при более высокой дозе. Это позволяет снизить воздействующую на пациента дозу при сохранении качества изображения.
На Фиг.1 изображена система 100 визуализации, такая как сканер для компьютерной томографии (КТ). Система 100 визуализации включает в себя в общем случае неподвижный гентри 102 и поворотный гентри 104. Поворотный гентри 104 поддерживается с возможностью поворота неподвижным гентри 102 и поворачивается вокруг зоны 106 обследования относительно продольной или z-оси 108.
Источник 110 излучения, такой как рентгеновская трубка, поддерживается поворотным гентри 104. Источник 110 излучения испускает излучение из фокального пятна, и это излучение проходит через зону 106 обследования. Контроллер 112 источника управляет источником 110, включающим источник тока и/или напряжения.
Коллиматор 114 источника включает в себя элементы коллимации, которые коллимируют излучение, формируя в общем случае конусообразный, клинообразный, веерообразный или имеющий другую форму луч излучения. Контроллер 116 коллиматора управляет коллиматором 114 источника, включая относительное положение элементов, что облегчает определение ширины луча излучения по х и/или z осям.
Двухмерная, чувствительная к излучению, детекторная матрица 118 расположена на дуге окружности напротив источника 110 излучения за зоной 106 обследования. Детекторная матрица 118 включает в себя множество рядов детекторов, которые проходят вдоль направления z-оси 108. Детекторная матрица 118 детектирует излучение, проходящее через зону 106 обследования, и генерирует проекционные данные, определяющие его.
Реконструирующее устройство 120 реконструирует проекционные данные и генерирует данные трехмерного (3D) объемного изображения, характеризующие его. Реконструирующее устройство 120 может использовать обычное 3D реконструирование с фильтрованной обратной проекцией, алгоритм конусообразного луча, итерационный алгоритм и/или другой алгоритм.
Стол 122 пациента, такой как кушетка, служит опорой для объекта или субъекта, такого как пациент-человек, в зоне 106 обследования. Контроллер 124 стола пациента управляет столом 122 пациента, включая скорость, с которой стол 122 пациента движется через зону 106 обследования во время сканирования.
Компьютерная система общего назначения или компьютер служит в качестве консоли 126 оператора. Процессор консоли 126 исполняет машиночитаемые команды на консоли 126, которые позволяют оператору управлять работой системы 100, как, например, выбирать протокол сканирования с малой дозой, устанавливать параметры сканирования, такие как ток источника, напряжение источника, ширина луча, уровень, толщина среза, тип сканирования (например, аксиальное или винтовое/спиральное сканирование) и число циклов сканирования, запуск сканирования, и т.п.
Система 100 может быть использована для выполнения сканирования с полной дозой и сканирования со сниженной или уменьшенной дозой.
Схема 128 улучшения качества изображения улучшает данные изображения, генерируемые системой 100 визуализации (или другой системой визуализации), такие как данные изображения при сканировании с уменьшенной дозой. В одном варианте осуществления данные изображения улучшаются на основе предварительно определенного порогового уровня качества изображения, такого как пороговый уровень шума изображения. Как будет описано более подробно ниже, это может включать в себя определение стандартного шумового отклонения для данных изображения или распределения вариации шума из проекционных данных, используемых для генерации данных изображения, и генерацию улучшенных данных изображения на основе исходных данных изображения при уменьшенной дозе и данных изображения при пониженном шуме, сгенерированных с использованием стандартного шумового отклонения или распределения вариаций шума.
В результате схема 128 улучшения изображения может быть использована для улучшения качества изображения данных изображения при сканировании с уменьшенной дозой до уровня, который является почти таким же или, по существу, подобным качеству изображения при сканировании с эквивалентной более высокой дозой или полной дозой. Следовательно, воздействующая на пациента доза может быть снижена при сохранении предварительно определенного уровня качества изображения и исследуемой структуры сканируемого объекта. Схема 128 улучшения изображения может дополнительно быть сконфигурирована с возможностью улучшения конкретной представляющей интерес структуры (например, краев) и/или генерации данных, которые, по существу, инвариантны по отношению к одному или более параметрам сбора информации (например, толщине среза).
В иллюстрируемом варианте осуществления схема 128 улучшения изображения является частью системы 100, но отделена от консоли 126. В другом варианте осуществления схема 128 улучшения изображения является частью консоли 126. Еще в одном варианте осуществления схема 128 улучшения изображения расположена на удалении от системы 100, например, в компьютерной системе, такой, как рабочая станция за пределами кабинета обследования, в котором расположена система 100. Схема 128 улучшения изображения также включает в себя один или более процессоров, которые исполняют одну или более читаемых и исполняемых компьютером команд, запоминаемых или закодированных в машиночитаемом носителе информации в схеме 128 улучшения изображения или в другом компоненте, для выполнения обсуждаемых здесь функций.
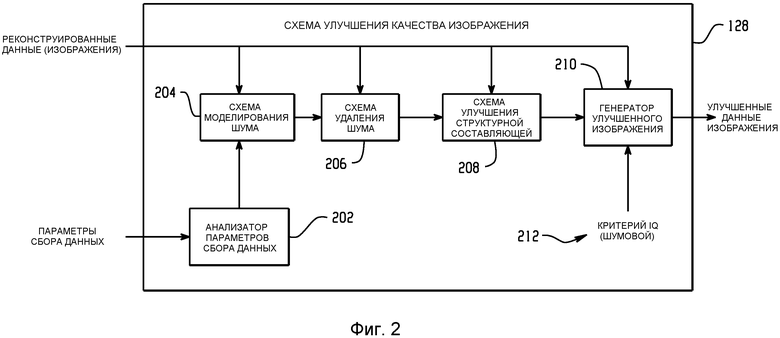
На Фиг.2 изображен пример схемы 128 улучшения качества изображения. В этом примере схема 128 улучшения качества изображения сконфигурирована с возможностью улучшения данных изображения на основе распределения шума, определенного из реконструированных данных (изображения).
Схема 128 улучшения изображения включает в себя анализатор 202 параметров сбора данных, который анализирует один или более из параметров сбора данных (сканирования), используемых для сканирования объекта или субъекта и генерации данных изображения. Должно быть понятно, что параметры сбора данных могут быть получены от консоли 126, запоминающего устройства и/или другого компонента, и/или вручную вводиться пользователем.
Анализатор 202 параметров сбора данных автоматически определяет информацию из параметров сбора данных, и эта информация может приниматься в расчет при генерации улучшенных данных изображения. В качестве примера анализатор 202 параметров сбора данных может автоматически идентифицировать информацию из параметров сбора данных, относящихся к толщине среза, и эта информация может быть использована для генерации улучшенных данных изображения, которые, по существу, неизменны по толщине среза при сборе данных.
Эта информация может приниматься в расчет при определении пространственных ядерных весов, рассматриваемых ниже (например, в уравнении 2) и используемых для удаления шума, и включает в себя, не ограничиваясь этим, минимальное число пространственных весов и центральный пространственный вес для фильтрующего ядра. Эти два параметра могут облегчить выравнивание относительного влияния соседних элементов объемного изображения (вокселов) в ядре удаления шума, сохраняя при этом размер и силу пространственной составляющей фильтрующего ядра неизменными по отношению к толщине среза при обследовании. Такое выравнивание приводит к результатам, которые оказываются близкими к тому, чтобы быть неизменными по отношению к толщине среза при сборе данных. После того как пространственное взвешивающее ядро задано, параметры алгоритма, относящиеся к толщине среза, выводятся из него.
Должно быть понятно, что другая информация может быть дополнительно или альтернативно получена из параметров сбора данных и использована для создания улучшенных данных изображения. Кроме того, в другом варианте осуществления анализатор 202 параметров сбора данных отсутствует. В таком варианте осуществления конкретная информация определяется другим образом и передается в схему 128 улучшения качества изображения или не используется при определении улучшенных данных изображения.
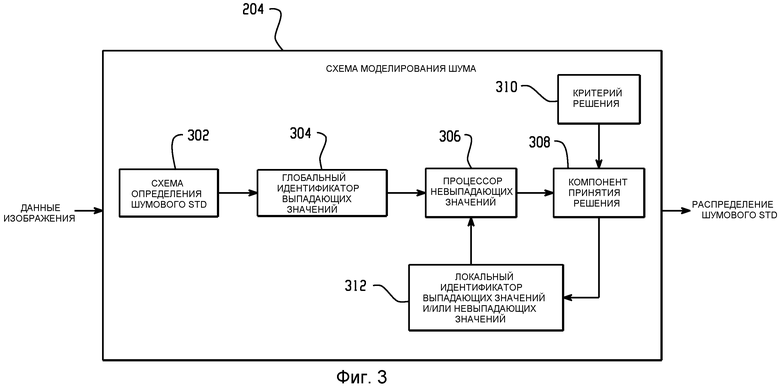
Схема 128 улучшения изображения дополнительно включает в себя схему 204 моделирования шума, которая моделирует или вычисляет распределение шума на основе данных изображения. Пример такой схемы моделирования шума изображен на Фиг.3.
Как показано на Фиг.3, схема 204 моделирования шума включает в себя схему 302 определения стандартного шумового отклонения (STD), которая определяет стандартное шумовое отклонение для субфрагментов вокселов в данных изображения. В общем случае стандартное отклонение субфрагментов вокселов ведет себя как случайная переменная со смешанным распределением плотности, когда субфрагменты изменяются по объему изображения. Такие субфрагменты включают в себя выпадающие значения (края), соответствующие неоднородным зонам, и субфрагменты, которые включают в себя невыпадающие значения (не края), соответствующие однородным зонам.
Глобальный идентификатор 304 выпадающих значений идентифицирует выпадающие значения в данных изображения на основе глобального алгоритма и стандартного шумового отклонения. В одном не ограничивающем примере он включает в себя сегментацию сканируемого объекта или субъекта по остатку данных изображения. Такая сегментация может быть обеспечена через установление порогового значения, сопровождаемого способом наращивания зоны или другим способом. Сегментация данных может облегчить сокращение числа вокселов, которые будут впоследствии обрабатываться, и тем самым сократить время обработки.
Глобальный идентификатор 304 выпадающих значений затем анализирует сегментированные данные. В одном примере глобальный анализ включает в себя использование гистограммы локального STD малых зон сканируемого объекта или субъекта, при этом гистограмма представляет распределение локального STD в данных изображения. Локальное STD по вызывающим сомнение выпадающим значениям может быть идентифицировано путем использования этой гистограммы, например, в виде величин сигналов, превышающих фиксированный процент распределения, или другим образом.
Процессор 306 невыпадающих значений обрабатывает невыпадающие значения (определенные по выпадающим значениям) и генерирует распределение шумового STD для данных изображения. В иллюстрируемом варианте осуществления процессор 306 невыпадающих значений обрабатывает невыпадающие значения на основе алгоритма сглаживания, такого как алгоритм широкого двухмерного (2D) медианного фильтра, который применяется к данным изображения с локальным STD. В иллюстрируемом варианте осуществления значения в результирующей STD матрице, которые определяются как выпадающие значения, игнорируются, и любые оставшиеся выпадающие значения в новой оценке уровня шума заполняются, используя интерполяцию (например, линейную, сплайновую, и т.п.).
В альтернативном варианте осуществления широкая медиана аппроксимируется, используя метод с переменной разрешающей способностью. Использование аппроксимации может способствовать сокращению времени обработки. В другом альтернативном варианте осуществления значения выпадающих значений локального STD заменяются повторяющейся комбинацией, которая включает в себя два экстремальных значения из распределения локального STD, и эта комбинация синхронизируется с вычислениями переменной разрешающей способности. Такая замена позволяет произвести быстрое вычисление условной медианы по зонам в изображении для каждой отдельной разрешающей способности. Конкретная используемая для замены комбинация может быть выбрана таким образом, что аппроксимированный результат будет очень близок к результату вычисления нормальной медианы.
Компонент 308 принятия решения определяет, следует ли уточнить распределение шумового STD. В иллюстрируемом варианте осуществления такое решение основывается, по меньшей мере частично, на предварительно определенном критерии 310 принятия решения, который может запоминаться в локальном или удаленном запоминающем устройстве. В одном примере этот критерий включает в себя максимальное число итераций. Дополнительно или альтернативно критерий основывается на разности между результатами двух итераций и предварительно определенном диапазоне разностей, при этом последующая итерация не выполняется, если разность находится в пределах предварительно определенного диапазона разностей. Дополнительно или альтернативно критерий основывается на предварительно определенном периоде времени, причем последующая итерация не выполняется по истечении этого периода времени.
В тех случаях, когда распределение шумового STD должно быть уточнено, локальный идентификатор 312 выпадающих значений и/или невыпадающих значений идентифицирует ряд выпадающих значений из невыпадающих значений, основываясь на локальном алгоритме. В одном примере это включает в себя корректировку набора выпадающих значений, основываясь на сравнении между локальным стандартным отклонением исходных данных изображения и новой оценкой уровня шума. Это может быть достигнуто путем идентификации локального стандартного отклонения в исходном изображении, как только выпадающего значения, если его величина значительно выше, чем соответствующая оценка локального уровня шума. Затем определяется новая оценка локального уровня шума, как было описано выше.
Схема 204 моделирования шума подает на выход сигнал, указывающий распределение шумового STD.
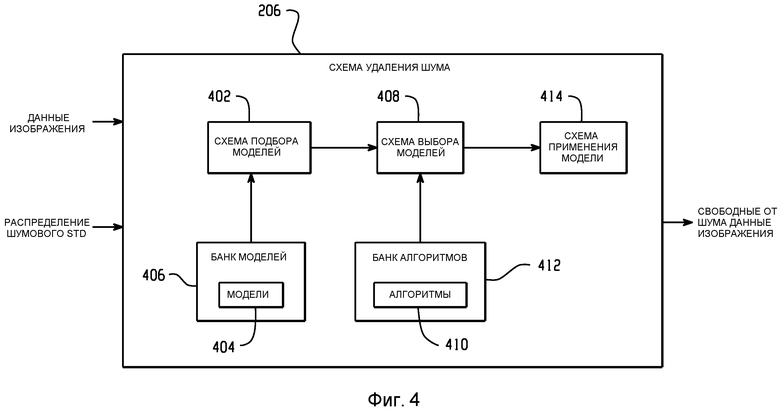
Схема 128 улучшения качества изображения дополнительно включает в себя схему 206 удаления шума, которая удаляет шум из данных изображения, основываясь на распределении шумового STD. Пример схемы 206 удаления шума изображен на Фиг.4.
Как изображено на Фиг.4, схема 206 удаления шума включает в себя схему 402 подбора моделей, которая подбирает различные локальные структурные модели 404 из банка 406 моделей к данным изображения. В одном варианте осуществления это включает в себя подбор одной или более локальных структурных моделей к каждому вокселу и его трехмерному (3D) окружению.
Схема 206 удаления шума также включает в себя схему 408 выбора модели, которая выбирает модель из подобранных моделей, которая пригодна для удаления шума из данных изображения, сохраняя при этом структуру, представляющую сканируемый объект или субъект в данных изображения. Иллюстрируемая схема 408 выбора модели выбирает модель, основываясь на одном или более алгоритмах 410, таких как алгоритм статистического обучения или другой алгоритм машинного обучения в банке 412 алгоритмов.
Схема 206 удаления шума также включает в себя схему 414 применения модели, которая применяет выбранную модель к данным изображения для удаления шума. Новое оцененное значение воксела определяется из соответствующего значения модели. Выходным сигналом схемы 414 применения модели являются не содержащие шума данные изображения.
Ниже описывается не ограничивающий пример подбора моделей, выбора модели и применения выбранной модели. В этом примере для заданного объема V 3D изображения вокселов с индексами i,j и k не содержащая шума структура М, которая имеет наименьшее взвешенное эвклидово расстояние от субобъема Vi+i',j+j',k+k' содержащего шум изображения V, может быть найдена из уравнения 1.
Уравнение 1:

в котором для положительного целого числа n индексы i',j' и k' принимают значения от -n до n, p представляет вектор свободного параметра, M
i',j',k'
(p) представляет значение модели для (i+i',j+j',k+k') воксела в объеме, w
i',j',k'
представляет весовые коэффициенты и 
Весовые коэффициенты могут определяться уравнением 2.
Уравнение 2:

где w spatial i',j',k' представляет веса для окружающих вокселов, согласно их пространственному расстоянию до Vi,j,k , и w HU i',j',k' представляет веса для окружающих вокселов, согласно их расстоянию по величине до V i',j',k' в HU (единицах шкалы Хаунсфилда) пространстве.
Член w spatial i',j',k' может быть определен из уравнения 3.
Уравнение 3:
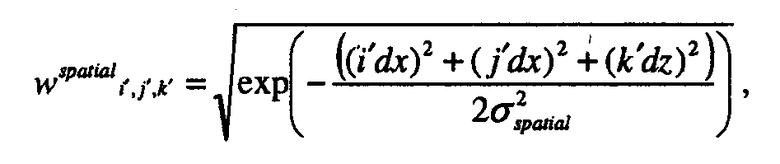
где dx - размер пиксела (например, в миллиметрах, или мм),dz - толщина среза (например, в мм) и σ spatial - параметр алгоритма, который управляет усилением весов.
wHU i',j',k' может быть определен из уравнения 4.
Уравнение 4:
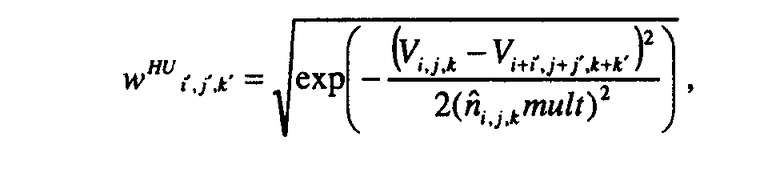
где 
В целях пояснения предположим, что банк 406 моделей включает в себя две модели 404: константную модель M i',j',k' (c)=c и полиномиальную модель второго порядка

Конечно, здесь предполагаются и другие модели.
Для константной модели подбор моделей совпадает с взвешенным усреднением как функции, определяемой уравнением 5.
Уравнение 5:

где 
Для полиномиальной модели второго порядка подбор моделей совпадает с решением методом наименьших квадратов 
Уравнение 6:
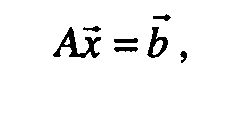
где матрица А является (2n+1)3 × 4 матрицей с рядами
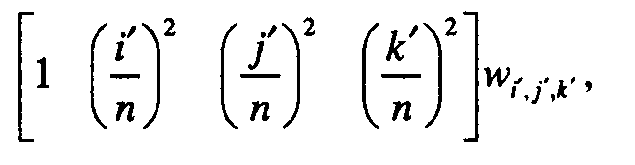 для фиксированной целочисленной тройки
для фиксированной целочисленной тройки
(i',j',k'), а вектор b является вектором длины 2n+1 с соответствующими элементами V i+i',j+j',k+k' ·w i,j,k для каждой фиксированной целочисленной тройки (i',j',k'). Решение методом наименьших квадратов уравнения 6 может быть найдено на основе уравнения 7.
Уравнение 7:
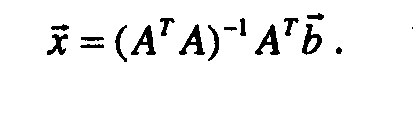
Обращение матрицы A T A может быть найдено, используя различные алгоритмы обращения матриц.
В целях пояснения предположим, что матрица A
T
A имеет полный ранг. Также предположим, что первая составляющая вектора 

При сделанных выше предположениях, не содержащая шума оценка может быть определена по уравнению 8.
Уравнение 8:

где Cij является (i,j) адъюнктом матрицы A'A и [C11 C21 C31 C41] является 1×4 матрицей, состоящей из четырех адъюнктов.
В одном примере одна из вышеупомянутых двух моделей, такая как простейшая из двух моделей, сначала подбирается к данным изображения. В этом примере сначала подбирается константная модель. Затем определяется метрика для подобранной модели. Пример подходящей метрики описывается уравнением 9.
Уравнение 9:
где

Метрика сравнивается с предварительно определенным пороговым значением TH, например, как показано в неравенстве уравнения 10.
Уравнение 10:
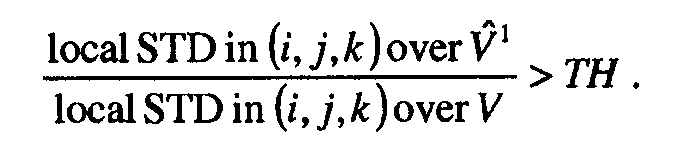
Пороговое значение TH может быть оценено, используя метод Монте-Карло, например, применительно к изучению искусственного однородного шума. Пороговое значение TH по умолчанию может быть задано различным образом, например, на основе статистической значимости более 50%, такой как 60%, 80%, 90%, 95%, 99% или другой статистической значимости.
Если метрика удовлетворяет пороговому значению, то выбирается и применяется полиноминальная модель. В противном случае выбирается и применяется константная модель. Заметим, что уравнение 10 предполагает эффективность первой модели (константной модели в этом примере). В общем случае, если первая модель недостаточно эффективна, то используется вторая модель.
По желанию вышеупомянутый способ может применяться итеративно. При итеративном подходе результат одной итерации используется как входной сигнал для последующей итерации. Последующая итерация может дополнительно понижать шум.
Схема 128 улучшения качества изображения по желанию включает в себя схему 208 улучшения структурной составляющей. В одном примере схема 208 улучшения структурной составляющей обеспечивает адаптивное улучшение изображения структурной составляющей. В одном варианте осуществления схема 208 улучшения структурной составляющей адаптивно увеличивает резкость данных изображения, вводя оценку уровня шума посредством программного задания порогового значения, чтобы наметить предварительно определенную ощущаемую резкость изображения.
Увеличение резкости может быть достигнуто за счет использования лапласовского или другого подхода. При лапласовском подходе уровень резкости может быть определен адаптивно как функция локального лапласиана, уровня локального шума и различных входных параметров. Параметры могут быть использованы для управления степенью усиления и адаптации при увеличении резкости.
Схема 128 улучшения качества изображения дополнительно включает в себя генератор 210 улучшенных изображений. Иллюстрируемый генератор 210 улучшенных изображений генерирует улучшенное изображение на основе данных изображения и данных изображения при пониженном шуме. В одном примере генератор 210 улучшенных изображений генерирует данные улучшенного изображения путем сочетания данных изображения и данных изображения при пониженном шуме на основе от воксела к вокселу. Данные могут объединяться на основе линейного или нелинейного алгоритма смешения.
В иллюстрируемом варианте осуществления данные объединяются на основе предварительно определенного IQ (шумового качества изображения) критерия 212. IQ критерий 212 является регулируемым (например, может быть задан и изменен на основе ввода пользователя), что позволяет управлять уровнем шума в улучшенных данных изображения, который непосредственно связан с дозой при сборе данных. В силу этого пользователь может задать уровень шума и генерировать улучшенные данные изображения, а затем повторять это для одного или более других уровней шума. В одном примере IQ критерий 212 задается, чтобы обеспечить возможность сохранения спектра шумовой мощности.
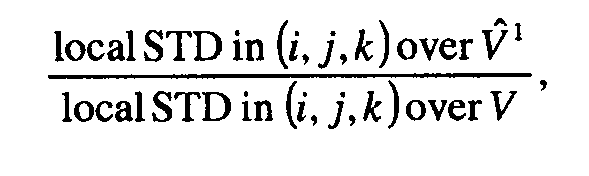
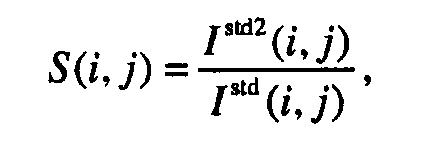
Ниже описывается один не ограничивающий подход к определению соотношения при смешении данных изображения и данных изображения с пониженным уровнем шума. Алгоритм использует сигналы стандартного отклонения в исходном и фильтрованном изображении и формирует другой сигнал как отношение двух этих сигналов. Соотношение при смешении находится как медиана этого отношения, после того как будут убраны выпадающие значения.
Если I std является локальным стандартным отклонением исходного изображения и I std2 является локальным стандартным отклонением очищенного от шумов изображения, и оба они определены с использованием радиуса r≥1 диска, их отношение может быть вычислено для каждой пары пиксельных индексов (i,j) в изображении по уравнению 11.
Уравнение 11:
(или  где деление производится на поэлементной основе).
где деление производится на поэлементной основе).
Первый уровень выпадающих значений приходит из матрицы O 1, которая определяется как расширенная версия матрицы B classifier , используя радиус d≥1 расширения, где B classifier - булева матрица, выведенная из условия в уравнении 10:

Другие выпадающие значения в матрице S идентифицируются как, большие единицы. Но вместо того, чтобы их отбрасывать, выбирается только их десятичная часть, как показано в уравнении 12.
Уравнение 12:

которое может быть записано как S = mod(S(~O1), 1) в псевдокодовом представлении. Оценочный коэффициент f может быть определен как медиана сигнала S 1 или как мода сигнала S 1.
При заданном целевом уменьшении T шума первая оценка соотношения при смешении определяется тогда из требования, что вариации шума в обрабатываемом изображении равны вариациям в исходном изображении, умноженным на 1-T, в соответствии с уравнением 13.
Уравнение 13:
На следующем этапе соотношение p 1 при смешении корректируется множителем k и смещением b, согласно уравнению 14.
Уравнение 14:

Затем соотношение р при смешении определяется из требования, что оно должно находиться в предварительно определенном диапазоне 0 ≤ m 2 < m 1 ≤ 1, например, на основе формулы в уравнении 15.
Уравнение 15:

Как обсуждалось выше, схема 128 улучшения качества изображения, описанная здесь, может использоваться для улучшения данных изображения при уменьшенной дозе, с тем, чтобы качество изображения с данными изображения при уменьшенной дозе оставалось таким же, или по существу таким же, что и качество изображения с данными изображения при полной дозе.
Это графически представлено на Фиг.5, где показано распределение 502, 504 и 506 величин градиентов соответственно для сканирования с полной (100%) дозой, сканирования с дозой 50% и сканирования с дозой 50% с улучшением изображения. Распределение величин пропорционально качеству изображения. Как показано, распределение 506 градиента для сканирования при дозе 50% с улучшением изображения, по существу, подобно распределению 502 градиента для сканирования при полной (100%) дозе.
Предполагаются также изменения.
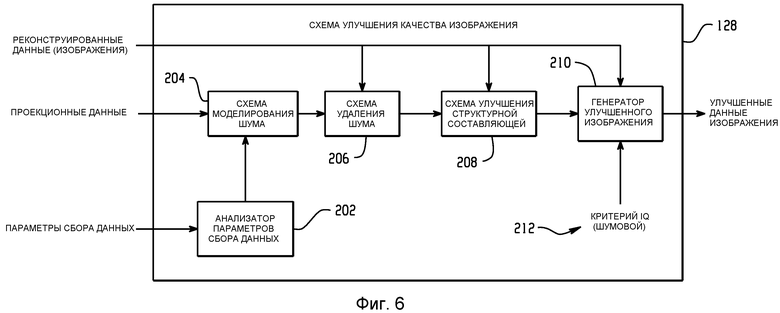
На Фиг.2 схема 204 моделирования шума генерирует распределение шумового STD на основе данных изображения, которые используются для генерации улучшенных данных изображения. В альтернативном варианте осуществления (Фиг.6) схема 204 моделирования шума генерирует распределение вариаций шума на основе проекционных данных, которые используются для определения улучшенных данных изображения.
В этом примере схема 204 моделирования шума обрабатывает измерения линейного интеграла в проекционных данных и генерирует распределение вариаций шума для проекционных данных. В одном случае это может быть реализовано следующим образом. Прежде всего, создается синограмма вариаций из проекционных данных. С этой целью для каждого значения линейного интеграла (или каждой выборки в синограмме) вычисляется изменение измерения как функция уравнения 16.
Уравнение 16:
где N0 - число введенных фотонов в пациента в направлении текущего излучения и P - линейный интеграл ослабления вдоль текущего излучения.
Уравнение 16 учитывает пуассоновский характер фотонного излучения. В других вариантах осуществления уравнение 16 может быть расширено, чтобы учитывать также и шум от рассеивания, увеличение жесткости излучения, электронный шум и/или другие эффекты. Пример модели, которая учитывает также другие эффекты, включает в себя модель, описанную в работе Йенса Вигерта "Рассеянное излучение в компьютерной томографии конусообразным лучом: анализ, количественная оценка и компенсация" ("Scattered radiation in cone-beam computted analysis, quantification and compensation", Jens Wiegert, PhD Thesis, 2007).
В альтернативном варианте осуществления новая синограмма, которая может быть сгенерирована прямым проецированием через объем изображений реконструированного изображения в формате 2D или 3D, используется вместо исходных проекционных данных. При этом распределение вариаций шума может генерироваться, даже когда исходные проекционные данные отсутствуют или недоступны для считывания.
Схема 204 моделирования шума обрабатывает распределение вариаций шума и генерирует данные изображения с вариацией шума. Схема 204 моделирования шума может использовать алгоритм реконструкции, подобный алгоритму, используемому реконструирующим устройством 120 на Фиг.1, или другой алгоритм реконструкции, который может определить вариацию шума для каждого воксела или выбранного субфрагмента вокселов в данных изображения, генерируемых реконструирующим устройством 120.
В качестве примера в одном случае схема 204 моделирования шума реконструирует данные таким образом, который идентичен или почти идентичен обычному восстановлению с фильтрованной обратной проекцией, что требует двух операций свертывания (вместо только одной) и модифицированной функции взвешивания видимого изображения применительно к обратной проекции в формате 3D.
В тех случаях, когда проекции интерполируются в угловом и радиальном направлениях (угловая и радиальная перегруппировка), интерполяция может вносить шум в реконструированные данные изображения. Вышеупомянутый алгоритм также совместим со способами, которые вносят эффект угловой и радиальной перегруппировки, например, умножения данных синограммы изменений на коэффициент, который изменяется в пространственном отношении по детекторам.
Должно быть понятно, что обсуждавшиеся выше данные изображения с вариацией шума могут быть также использованы в других случаях применения. В качестве примера данные изображения с вариацией шума могут быть использованы с алгоритмом понижения шума в изображении для облегчения удаления шума.
В одном примере может быть использован квадратный корень такого изображения с вариацией шума на этапе 206 удаления шума вместо результата схемы 204 моделирования шума (см. Фиг.2).
В другом примере это включает в себя случаи применения, использующие алгоритм Рудина-Ошера-Фатеми для снижения шума. Например, для заданного содержащего шум изображения f(x,y), его домена Ω и скаляра λ этот алгоритм может быть использован для получения не содержащего шум изображения u(x,y) как минимизатор ценовой функции: (min)
С такой ценовой функцией вариация шума изображения может быть использована для изменения силы параметра λ пропорционально 1/ν, где ν - оценочная вариация изображения (на воксел).
В других вариантах осуществления используются другие алгоритмы для выполнения операции очищения изображения от шума, например, другие алгоритмы, которые понижают шум изображения, сохраняя при этом сильные градиенты реальных структур, и вносят данные вариации шума изображения в процесс удаления шума. В качестве другого примера данные изображения с вариацией шума могут быть использованы в применениях для оптимизации шума, таких как оптимизация шума с учетом дозы. Такое применение описано в заявке на патент с номером 61/253,881, поданной 22 октября 2009 года и озаглавленной "Устройство для оценки протокола сбора данных" ("Acquisition Protocol Assessment Apparatus"), которая включена сюда в полном объеме путем ссылки.
На Фиг.7-11 изображены разные способы. Должно быть понятно, что порядок следования действий не является ограничивающим, и одно или более этих действий могут происходить в другом порядке. Кроме того, одно или более из этих действий могут быть опущены и/или одно или более действий могут быть добавлены.
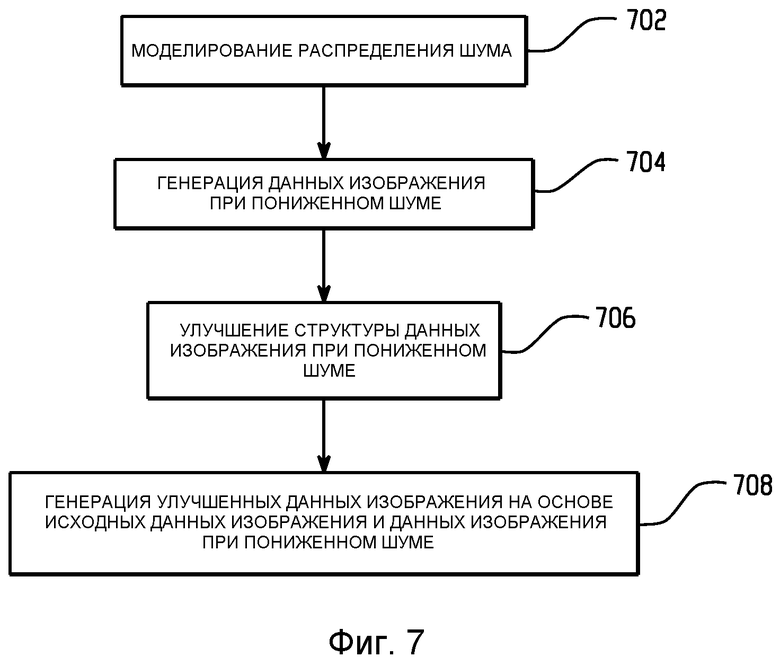
На Фиг.7 изображен способ улучшения данных изображения. Как обсуждалось здесь, он включает в себя улучшение данных изображения при малой дозе, с тем, чтобы качество изображения с данными изображения при малой дозе оставалось таким же или по существу таким же, что и качество изображения с данными изображения при полной дозе.
На этапе 702 моделируется распределение шума. В одном случае распределение шума является распределением шумового STD, генерируемого на основе данных изображения. В другом случае распределение шума является распределением вариаций шума, генерируемым на основе проекционных данных.
На этапе 704 данные изображения при пониженном шуме генерируются удалением шума из данных изображения, основываясь на распределении шумового STD или распределении вариаций шума.
На этапе 706 структура данных изображения при пониженном шуме улучшается. В другом варианте осуществления этап 706 опускается.
На этапе 708 улучшенные данные изображения генерируются на основе исходных данных изображения и данных изображения при пониженном шуме, например, путем сочетания исходных данных изображения и данных изображения при пониженном шуме на основе порогового уровня качества изображения, как описано здесь.
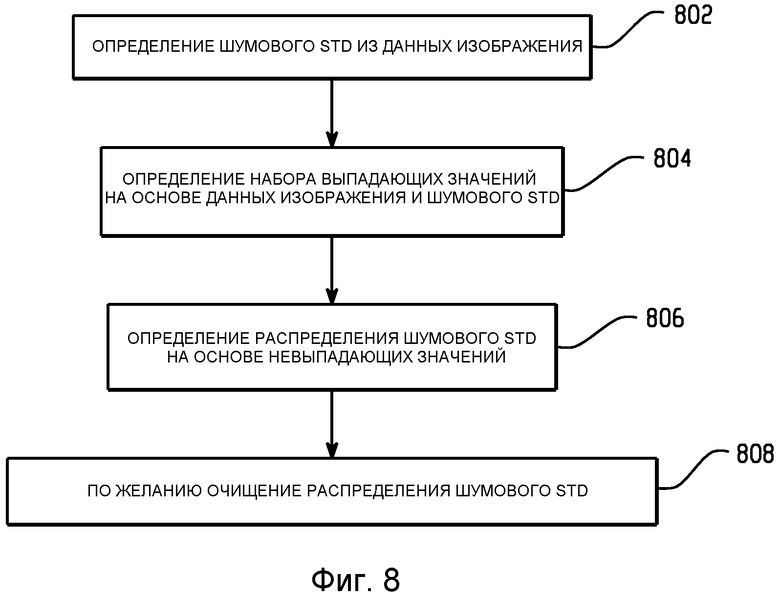
На Фиг.8 изображен способ моделирования шума в данных изображения.
На этапе 802 определяется стандартное шумовое отклонение для данных изображения.
На этапе 804 идентифицируется первый набор выпадающих значений в данных изображения на основе стандартного шумового отклонения и глобального алгоритма.
На этапе 806 определяются данные изображения при пониженном шуме на основе набора невыпадающих значений, которые определяются на основе первого набора выпадающих значений. Как было описано выше, это может быть достигнуто применением сглаживающего фильтра ко всем невыпадающим значениям.
Если определено, что данные изображений, содержащих шум, должны быть очищены, тогда на этапе 808 последующий набор выпадающих значений идентифицируется на основе набора невыпадающих значений, и очищенные данные изображения при пониженном шуме определяются на основе последующего набора невыпадающих значений, которые определяются на основе последующего набора выпадающих значений.
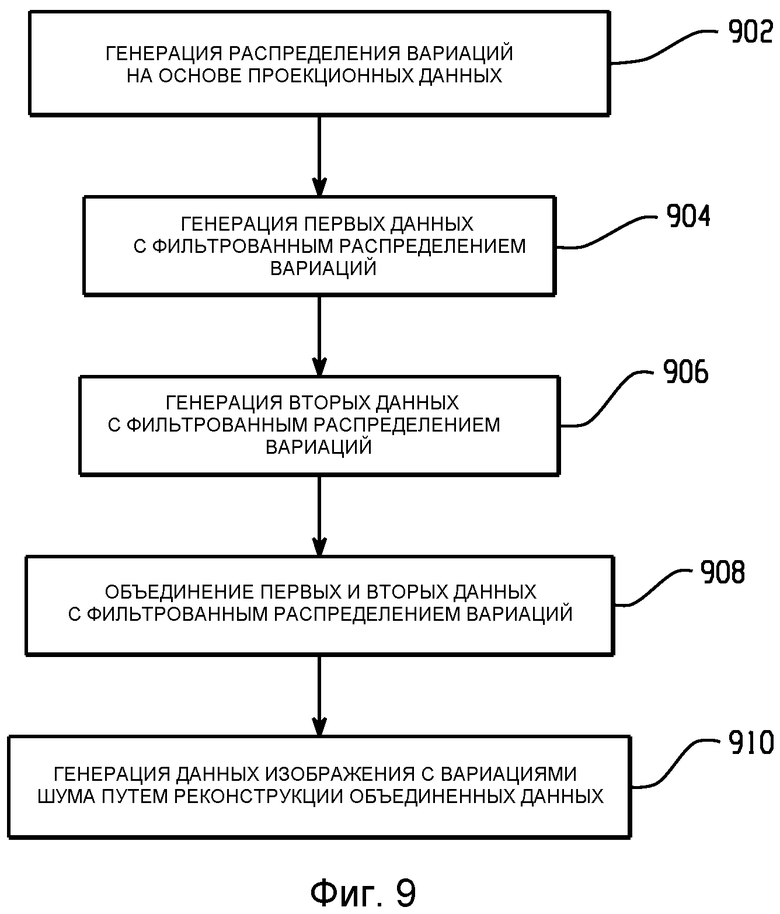
На Фиг.9 изображен способ моделирования шума в проекционных данных.
На этапе 902 генерируют распределение вариаций на основе проекционных данных.
На этапе 904 генерируют первые данные изображения с фильтрованными вариациями за счет фильтрации распределения вариаций с использованием первого фильтра. Примером первого фильтра является пилообразный фильтр с возведением в квадрат.
На этапе 906 генерируют вторые данные изображения с фильтрованными вариациями за счет фильтрации распределения вариаций с использованием второго фильтра. Примером второго фильтра является пилообразный фильтр со сдвигом.
На этапе 908 объединяют первые и вторые данные с фильтрованными вариациями. В одном не ограничивающем примере данные объединяют, используя алгоритм объединения пространств, такой как:

На этапе 910, данные изображения с вариациями шума генерируют обратным проецированием объединенных данных. Это может быть сделано посредством использования клина с возведением в квадрат или других весов, или же без весов.
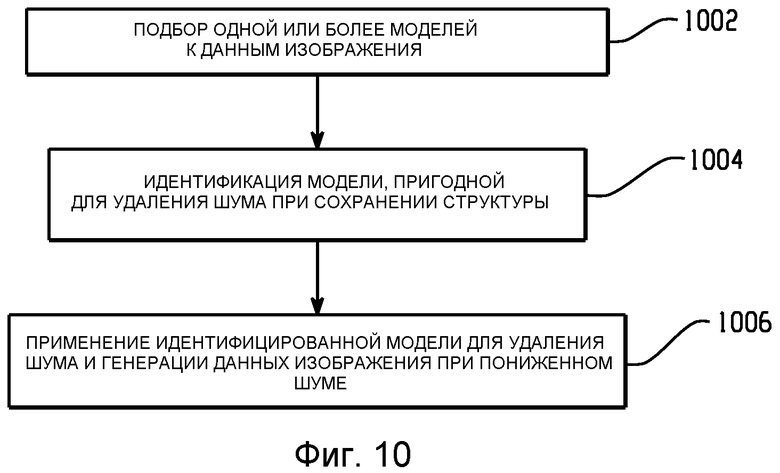
На Фиг.10 изображен способ удаления шума из данных изображения и генерации данных изображения при пониженном шуме.
На этапе 1002 одну или более моделей подбирают к данным изображения.
На этапе 1004 одну из одной или более моделей идентифицируют как пригодная для удаления шума из данных изображения при сохранении в то же время структуры, представляющей сканируемый объект или субъект в данных изображения.
На этапе 1006 эту идентифицированная модель применяют к данным изображения для удаления шума из данных изображения и генерации данных изображения при пониженном шуме.
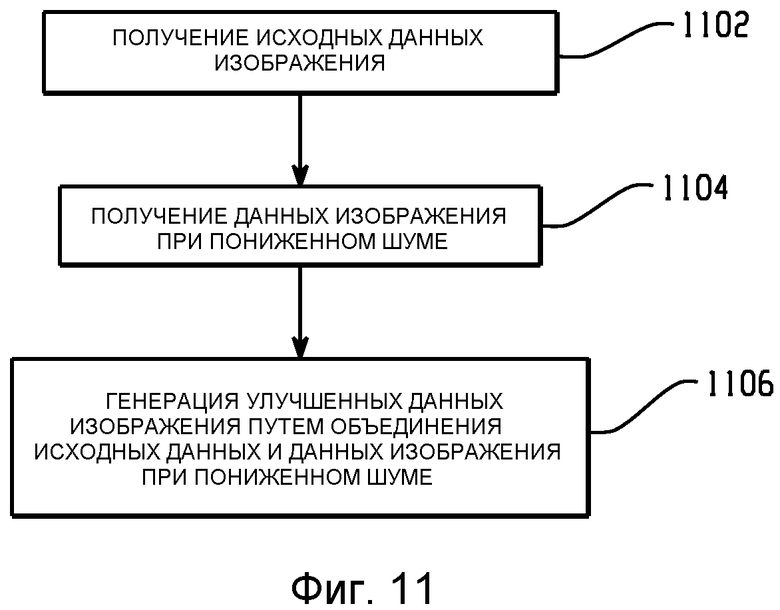
На Фиг.11 изображен способ генерации улучшенных данных изображения.
На этапе 1102 получают исходные данные изображения.
На этапе 1104 получают данные изображения при пониженном шуме.
На этапе 1106 генерируют улучшенные данные изображения на основе исходных данных изображения и данных изображения при пониженном шуме. Как обсуждалось выше, процентное содержание каждых из исходных данных изображения и данных изображения при пониженном шуме, вносящих свой вклад в улучшенные данные изображения, основано на предварительно определенном IQ критерии.
Вышеупомянутое может быть реализовано посредством машиночитаемых команд, которые используются процессором (процессорами) компьютера, заставляя процессор(ы) выполнять описанные действия. В таком случае эти команды запоминаются в машиночитаемом носителе информации, связанном или другим образом доступном для соответствующего компьютера.
Изобретение было описано здесь со ссылкой на различные варианты осуществления. Модификации и изменения могут прийти в голову специалистам в данной области по прочтении настоящего описания. Подразумевается, что изобретение трактуется как включающее в себя все такие модификации и изменения в той мере, в какой они укладываются в объем прилагаемых пунктов формулы изобретения или их эквивалентов.
Изобретение относится к системе и способу улучшения данных изображения и находит применение в компьютерной томографии. Технический результат заключается в снижении шума получаемых данных изображения. Технический результат достигается за счет способа, который включает в себя генерацию улучшенных данных изображения на основе данных изображения с уменьшенной дозой и предварительно определенного порогового уровня качества изображения, причем качество изображения улучшенных данных изображения, по существу, такое же, что и качество изображения данных изображения при более высокой дозе, и системы, которая включает в себя схему улучшения качества изображения, которая генерирует улучшенные данные изображения, основываясь на данных изображения при уменьшенной дозе и предварительно определенном пороговом уровне качества изображения, причем качество изображения улучшенных данных изображения, по существу, такое же, что и качество изображения данных изображения при более высокой дозе. 2 н. и 13 з.п. ф-лы, 11 ил.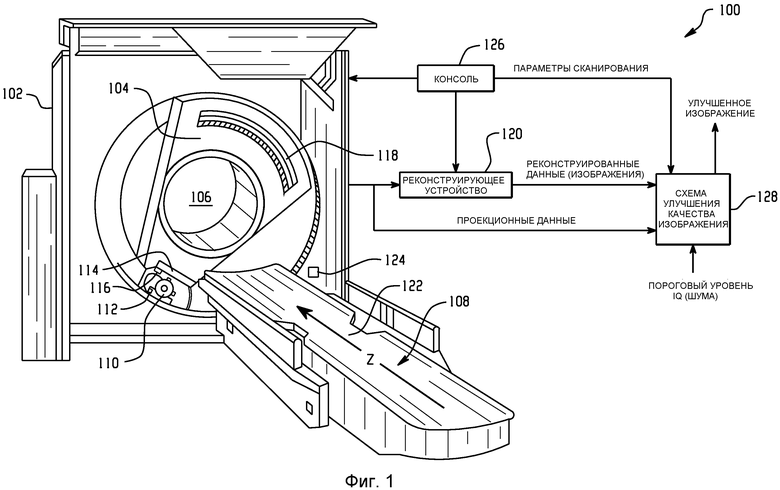
1. Способ улучшения качества изображения, содержащий этапы, на которых:
моделируют распределение шума на основе данных изображения путем определения стандартного шумового отклонения для субфрагментов вокселов в данных изображения, причем эти субфрагменты включают в себя выпадающие значения, соответствующие неоднородным зонам, и невыпадающие значения, соответствующие однородным зонам;
генерируют данные изображения при пониженном шуме на основе распределения шума путем подбора различных локальных структурных моделей к данным изображения, выбирают модель из подобранных моделей, которая пригодна для удаления шума из данных изображения при сохранении структуры, представляющей сканируемый объект или субъект в данных изображения, и применяют выбранную модель к данным изображения для удаления шума; и
генерируют улучшенные данные изображения, на основе данных изображения и данных изображения при пониженном шуме, путем объединения данных изображения и данных изображения при пониженном шуме по принципу воксел за вокселом, основываясь на линейном или нелинейном алгоритме смешения и предварительно определенном шумовом критерии качества изображения, причем качество изображения улучшенных данных изображения, по существу, такое же, что и качество изображения данных изображения при более высокой дозе.
2. Способ по п. 1, дополнительно содержащий этап, на котором:
генерируют улучшенные данные изображения на основе данных изображения при уменьшенной дозе.
3. Способ по п. 1 или 2, дополнительно содержащий этап, на котором:
анализируют один или более параметров сбора данных, используемых для сканирования объекта или субъекта и генерации данных изображения, и идентифицируют информацию из одного или более параметров сбора данных.
4. Способ по п. 3, дополнительно содержащий этап, на котором:
используют информацию при определении пространственных ядерных весов для удаления шума.
5. Способ по п. 4, в котором информация содержит по меньшей мере одно из минимального числа пространственных весов и центрального пространственного веса фильтрующего ядра.
6. Способ по п. 1 или 2, дополнительно содержащий этап, на котором:
идентифицируют выпадающие значения в данных изображения, основываясь на глобальном алгоритме и стандартном шумовом отклонении.
7. Способ по п. 6, в котором глобальный алгоритм включает в себя этапы, на которых:
сегментируют сканируемый объект или субъект по оставшимся данным изображения; и
анализируют сегментированные данные, используя гистограмму локального стандартного отклонения малых зон сканируемого объекта или субъекта, в которых гистограмма представляет распределение локального стандартного отклонения в данных изображения, причем локальное стандартное отклонение на предполагаемых выпадающих значениях определяют, используя гистограмму.
8. Способ по п. 7, дополнительно содержащий этап, на котором:
обрабатывают невыпадающие значения на основе сглаживающего алгоритма, который применен к данным изображения с локальным стандартным отклонением.
9. Способ по п. 1 или 2, в котором предварительно определенный шумовой критерий изображения регулируется пользователем.
10. Способ по п. 1 или 2, дополнительно содержащий этап, на котором: улучшают структурные составляющие в данных изображения.
11. Способ по п. 1 или 2, в котором улучшенные данные изображения, по существу, неизменны по отношению к толщине среза сбора данных, приводящего к данным изображения.
12. Способ по п. 1 или 2, в котором данные улучшенного изображения и данные изображения при более высокой дозе имеют, по существу, аналогичные вариации шума.
13. Система улучшения качества изображения, содержащая:
схему (204) моделирования шума, которая генерирует распределение шума для данных изображения путем определения стандартного шумового отклонения для субфрагментов вокселов в данных изображения, причем эти субфрагменты включают в себя выпадающие значения, соответствующие неоднородным зонам, и невыпадающие значения, соответствующие однородным зонам;
схему (206) удаления шума, которая удаляет шум из данных изображения при уменьшенной дозе, основываясь на распределении шума, путем подбора различных локальных структурных моделей к данным изображения, выбора модели из подобранных моделей, которая пригодна для удаления шума из данных изображения, сохраняя при этом структуру, представляющую сканируемый объект или субъект в данных изображения, и применения выбранной модели к данным изображения для удаления шума, генерируя тем самым данные изображения при пониженном шуме; и
генератор (210) улучшенного изображения, который генерирует улучшенные данные изображения на основе данных изображения при уменьшенной дозе и данных изображения при пониженном шуме, подбирая различные виды генерации улучшенного изображения, на основе данных изображения и данных изображения при пониженном шуме, путем объединения данных изображения и данных изображения при пониженном шуме по принципу воксел за вокселом, основываясь на линейном или нелинейном алгоритме смешения и предварительно определенном шумовом критерии качества изображения, причем качество изображения улучшенных данных изображения, по существу, такое же, что и качество изображения данных изображения при более высокой дозе.
14. Система по п. 13, дополнительно содержащая:
схему (208) улучшения структурной составляющей, которая адаптивно увеличивает резкость структурной составляющей в данных изображения, основываясь на локальном лапласиане, локальном уровне шума и параметре, который управляет степенью усиления и адаптивности увеличения резкости.
15. Система по п. 13 или 14, дополнительно содержащая:
анализатор (202) параметров сбора данных, который определяет информацию из одного или более параметров сбора данных, которая используется для генерации улучшенных данных изображения, являющихся, по существу, неизменными по отношению к толщине среза сбора данных, приводящего к данным изображения.
| US 7319466 B1, 15.01.2008 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| ГАЛСТУК | 1996 |
|
RU2098990C1 |
| СПОСОБ ГЕНЕРИРОВАНИЯ СТРУКТУРЫ УЗЛОВ, ПРЕДНАЗНАЧЕННЫХ ДЛЯ ПРЕДСТАВЛЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ИЗОБРАЖЕНИЙ С ГЛУБИНОЙ | 2002 |
|
RU2237284C2 |

